Université Aix-Marseille Formes d`une vésicule en
advertisement

Université Aix-Marseille
Thèse
pour obtenir le grade de
Docteur de l’université Aix-Marseille
Faculté des Sciences et Techniques
Spécialité : Mécanique et physique des fluides
présentée par
Roberto TROZZO
Formes d’une vésicule en géométrie confinée
Thèse dirigée par:
M. Marc JAEGER
Soutenue le :
2015
Devant le jury composé de :
M.
M.
M.
M.
M.
M.
Patrick
Marc
Marcel
Simon
Thomas
Pierre
BONTOUX
JAEGER
LACROIX
MENDEZ
PODGORSKI
SAGAUT
Directeur de thèse
Rapporteur
Rapporteur
Vesicle shapes under confined geometry
PhD Thesis presented by
Roberto TROZZO
Marseille, 2015
Thesis supervised by M. Marc JAEGER
and prepared at Laboratoire de Mécanique, Modélisation et Procédés Propres
UMR7340 Aix-Marseille Université - CNRS - Ecole Centrale Marseille
Marseille, France
iii
Summary
Vesicles are drops of radius of a few tens micrometers, bounded by an impermeable lipid
membrane of approximately 4 nm thickness, and embedded in an external viscous fluid.
The specific properties of the vesicle membrane make the system very deformable and
very constrained at the same time. Vesicles represent also an interesting simplified model
for red blood cells: although RBCs behave differently from vesicles due to the shear elasticity of their plasma membrane, they also share some similar mechanical behaviours with
vesicles, such as bending and surface incompressibility. This manuscript deals with the
description of a vesicle subjected to external stresses of hydrodynamical origin, in the
Stokes regime and in confined domains. Starting from an existing BEM model for free
space flows, original numerical methods are developed to take into account interactions
between the vesicle membrane and solid boundaries. Some situations involving more
than one characteristic length scale can become very challenging for computations in 3D,
whereas they could be treated much more efficiently with an axisymmetric model for all
axisymmetric regimes. In this manuscript we present also the axisymmetric extension of
the proposed three-dimensional models. In particular, we focus our attention on the cases
of a vesicle sedimenting towards a planar wall and a vesicle submitted to a Poiseuille flow
in a narrow capillary. The comparison between experimental shapes and numerical results in both cases shows very good agreement. Finally, the description of a new approach
for simulating RBCs behaviour in a fluid, based on the coupling between a continuum
description of the lipid membrane and a discrete representation of the cytoskeleton, is
proposed. This model is thus used to study the factors affecting the deformation of a
single RBC in a fluid and especially the influence of the cytoskeleton on the equilibrium
shape.
Key words : Vesicles, interfaces,complex fluids, Stokes flow, red blood cell, wall effect,
simulation, fluid-structure interaction.
v
Resumé
Les vésicules sont des gouttes de rayon de quelques dizaines de micromètres, limitées par
une membrane lipidique imperméable d’environ 4 nm d’épaisseur, et immergées dans un
fluide visqueux. Les propriétés spécifiques de la membrane de la vésicule rendent le système très déformable et très contraint dans le même temps. Les vésicules représentent
également un modèle simplifié intéressant pour les globules rouges: bien que les globules
rouges se comportent différemment des vésicules en raison de l’élasticité de cisaillement
de leur membrane plasmique, ils partagent aussi certains comportements mécaniques similaires avec les vésicules, en particulier lorsque la taille du capillaire est comparable au
diamètre de la cellule. Ce manuscrit s’intéresse à la description d’une vésicule soumise
à des contraintes extérieures d’origine hydrodynamique, du régime et Stokes dans des
domaines restreints. À partir d’un modèle BEM existant pour des fluides infinis, des
méthodes numériques originales sont développées pour prendre en compte les interactions
entre la membrane de la vésicule et les frontières solides. Certaines situations impliquant plus d’une échelle de longueur caractéristique peuvent devenir très difficiles pour
les calculs en 3D, alors qu’elles pourraient être traitées plus efficacement avec un modèle
axisymétrique pour tous les régimes axisymétriques. Dans ce manuscrit, nous présentons
également l’extension axisymétrique des modèles tridimensionnels. En particulier, nous
concentrons notre attention sur les cas d’une vésicule en sédimentation vers une paroi
plane et une vésicule soumise à un écoulement de Poiseuille dans un capillaire étroit. La
comparaison entre les formes expérimentales et les résultats numériques dans les deux cas
est satisfaisante. Enfin, la description d’une nouvelle approche pour simuler le comportement des globules rouges dans un fluide, basée sur le couplage entre un modèle continu
de la membrane lipidique et une représentation discrète du cytosquelette, est proposée.
Ce modèle est donc utilisé pour étudier les facteurs qui influent sur la déformation d’un
globule rouge isolé dans un fluide et en particulier l’influence du cytosquelette sur la forme
d’équilibre.
Mots-clés : Vésicules, interfaces, fluides complexes, écoulement de Stokes, globule
rouge, effet de paroi , simulation, interaction fluide-structure.
vii
Contents
Summary
v
Resumé
vii
1 Introduction
1.1 Complex fluids . . . . . . . . . . . . . . . . .
1.2 Soft matter: Drops, vesicles, capsules, RBCs .
1.3 The model for vesicles . . . . . . . . . . . . .
1.3.1 Equilibrium Shapes . . . . . . . . . .
1.3.2 Vesicle in a fluid flow . . . . . . . . . .
1.4 Objectives and organization of the work . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
3
7
8
11
2 Free Space Model
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Free space 3D BEM model . . . . . . . . . . . . . . . . . . . . . .
2.3 3D code optimisation . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Analysis of performance . . . . . . . . . . . . . . . . . . .
2.3.2 Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Free space axisymmetric BEM model . . . . . . . . . . . . . . . .
2.4.1 Axisymmetric Green’s function in free space . . . . . . . .
2.4.2 Axisymmetric vesicle model . . . . . . . . . . . . . . . . .
2.4.3 Validation and abilities of free space axisymmetric model
2.5 Extension for modelling vesicles with viscosity contrast . . . . . .
2.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
17
17
19
23
25
27
28
28
30
33
37
44
.
.
.
.
.
.
.
.
.
45
45
48
49
51
52
59
59
59
62
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Vesicles in a semi-confined geometry: preliminary results
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Extension of the 3D Green’s function . . . . . . . . . . . . . . . .
3.3 Extension of the axisymmetric Green’s function . . . . . . . . . .
3.4 Interaction potential . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Extension for a viscosity contrast . . . . . . . . . . . . . . . . . .
3.6.1 3D formulation - viscosity contrast with a wall . . . . . .
3.6.2 Axisymmetric formulation - viscosity contrast with a wall
3.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ix
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
CONTENTS
4 Vesicles in a capillary
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 BEM model for vesicles in a capillary . . . . . . . . . . . . . . . . .
4.2.1 Extension of the axisymmetric Green’s function . . . . . . .
4.2.2 Wall meshing alternative . . . . . . . . . . . . . . . . . . .
4.3 Validation test: sedimentation of a rigid sphere in a tube . . . . .
4.3.1 Validation of the capillary axisymmetric model . . . . . . .
4.3.2 Validation of the wall meshing alternative . . . . . . . . . .
4.4 Convergence study: vesicle in confined Poiseuille flow . . . . . . . .
4.4.1 Convergence study in function of vesicle’s mesh refinement
4.4.2 Convergence study in function of wall’s mesh refinement . .
4.5 Axisymmetric equilibrium shapes in a capillary . . . . . . . . . . .
4.6 Parametric study for axisymmetric vesicles in a capillary . . . . . .
4.6.1 Shape transition . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Dimple formation . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Non axisymmetric shapes . . . . . . . . . . . . . . . . . . . . . . .
4.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Towards a RBC model
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . .
5.2 Cytoskeleton model . . . . . . . . . . . . . . . . . . .
5.2.1 Nodal forces induced by the cytoskeleton . .
5.2.2 Cytoskeleton elastic energy . . . . . . . . . .
5.2.3 Equilibrium position . . . . . . . . . . . . . .
5.2.4 Connection with the shear modulus of a RBC
5.2.5 Coupling to the lipid membrane . . . . . . .
5.3 Results and discussion . . . . . . . . . . . . . . . . .
5.3.1 Sedimentation . . . . . . . . . . . . . . . . .
5.3.2 Optical Tweezers . . . . . . . . . . . . . . . .
5.3.3 Flow of a single RBC in a capillary . . . . . .
5.4 Summary . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
63
63
66
66
70
71
71
72
75
75
76
78
82
82
86
88
92
.
.
.
.
.
.
.
.
.
.
.
.
95
95
101
101
101
103
103
104
107
107
109
111
115
6 Conclusions and perspectives
117
A The discontinuity of the double-layer potential for Stokes flow
119
B Axisymmetric Green function for capillary flows
123
C Filon formula
125
Bibliography
127
x
Chapter 1
Introduction
1.1
Complex fluids
A simple fluid is composed by single molecules. Properties of simple fluids have already
been well studied and the motion equation, the Navier-Stokes equation, is known since
long time. On the other side, for what concerns complex fluids there are still lots of open
questions and the motion equation is far from being completely understood. In the last
years complex fluids have been received an increasing attention. The most important
difference is that, while Newtonian fluids are characterized only by their density ρ and
their viscosity η, complex fluids are governed also by their elasticity. So, in general, a
complex fluid can be also defined viscoelastic. Another important aspect of complex fluids
is that all the global flow properties depend on the local behaviour of his components.
The scale invariance is lost due to the presence of structures at the mesoscale level: this
phenomenon is generally called multi-scale organisation. The study of the elementary behaviour of the components let us understand the global behaviour, in order to characterize
the flow properties of the fluid.
1.2
Soft matter: Drops, vesicles, capsules, RBCs
With the term soft matter we indicate all the easily deformable objects, which react sensitively upon external mechanical perturbations, as compression or shear. Typical examples
of these objects are polymers, gels, colloidal suspensions, foams... This class of matter is
principally characterised by weak interactions between the polyatomic constituents, important thermal fluctuation effects, mechanical softness and a rich range of behaviours.
Interaction forces between elementary constituents of these objects are so weak (Van Der
Waals (Israelachvili, 2010) or entropic forces) that even a very small solicitation leads
to an important deformation (De Gennes, 1991). One fascinating aspect of soft matter
systems is that one can combine different building blocks to form new composite matter
with novel material properties.
Soft and deformable objects have been intensively studied for the past 50 years. Those
objects captured the attention of the medical research as well as the food, pharmaceutical
and cosmetic industries. They are very interested in the use of soft objects (drops, vesi1
Introduction
cles, capsules, solid beads or even cells) under external stresses, such as flow or osmotic
deflation and in the understanding of the physics of the phenomenon. Among other applications, drops are used as micro-reactors or micro-reservoirs for the trendy “lab-on-chip”
technology. Lipid bags (liposomes and vesicles) are used in the encapsulation and are
mimetic particles for living cells.
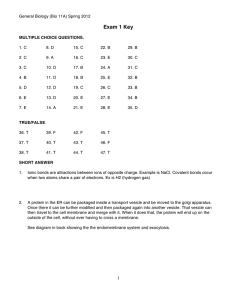
We propose in this section, a brief presentation of the three typical objects of this kind.
In a first time, we will present the parameters determinant of the physics of a drop (Fig.
1.1). Then we will detail the physical quantities responsible for the dynamics of a giant
lipid vesicle. Finally, we will establish the importance of the elasticity of the red blood
cell in its deformability. We progressively increase the complexity of our objects, from a
simple drop to vesicles to finally reach the understanding of the dynamics of blood cells in
the microcirculation. Those soft particles can have generic as well as specific behaviours
which are a signature of their particular mechanical properties.
Figure 1.1: Left: A liquid drop on a leaf. Centre: A capsule flowing in a channel (Image,
M. Leonetti). Right: Vesicle deposited on a glass substrate (Image, M. Leonetti).
A drop is simply an inclusion of an immiscible fluid in another fluid. The parameter
governing the minimization of the energy of a drop is the surface tension, which is the
energy required to increase the surface area by a unit of area. In the case of a drop,
molecules belonging to the surface are the same as those inside the drop. Vesicles are
drops encapsulated by a lipid membrane, which is formed by different molecules from
those in the interior of the vesicle. The vesicle’s lipid membrane has at the same time
some properties typical of solids and others of liquids and it is mainly characterized by
the curvature (or bending energy).
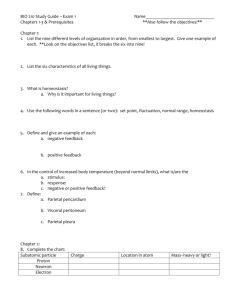
For the red blood cell (RBC) (Fig. 1.2), the elasticity of the membrane is the key
of its deformability in its motion through the complex network of the micro-circulation.
Red blood cells are still under intensive study. Nevertheless, their behaviour, such as
deformation or dynamics, is not totally understood because the physics brought into play
is complex. For example, the flow exerts a stress on the deformable particle, the object
adapts its shape to the external constrains and in return the new shape impacts and
perturbs the flow. The approach of interpretation chosen to explain the physics is the same
for all these objects: the hydrodynamics at low Reynolds number. Soft and deformable,
structured (or organized), micron-size particles (from 1 to 100 µm in diameter) are the
objects of the class that we chose to study. The physical properties of such objects
come from three participations: a 2D viscosity in the membrane or a modification of the
2
Introduction
surface tension, a 3D viscosity and/or elasticity induced by the internal media and the
interaction between the membrane and the internal media. Of course, it is an astute
and tricky combination of the 3 contributions that gives to the particle its mechanical
response. At the micron scale, the interface is very important (or dominant) and the
surface phenomena (exchanges, forces, roughness,...) cannot be neglected.
Knowing that their physical characteristics are different, can we extract the contribution of each mechanical parameter from the response of the object under confined flow?
In order to answer to this question, we chose to look at the response of our system when
flowing in a confined or semi-confined environment. Recent advances in the microfluidic
technology (Tabeling, 2005), allow wide applications like environmental testing (in situ
analysis of environmental contamination), biomedical applications (device for drug delivery, diagnostic, analysis...), small scale organic synthesis or technological application
(print-jet...). The use of microfluidic systems leads to many benefits among which decreasing coast in manufacture, decreasing analysis time, or reducing the consumption of
reagents. In addition, microfluidic channels can mimic the size of capillaries and flow conditions found in vivo in the microcirculation. The use of diagnostic devices of the same
size and with similar deformability as found in biology could lead to greater understanding
of physiologic and pathologic behaviours.
Figure 1.2: Left: Healthy RBCs with their usual discocyte shape. Right: Red blood cells
confined in narrow capillaries (Guido & Tomaiuolo, 2009).
1.3
The model for vesicles
Vesicles are typical soft matter systems. They consist of drops (typical radius ∼ 20 µm)
encapsulated by a lipid membrane (typical thickness ∼ 4 nm), embedded in an external
viscous fluid. With the hydrophobic tails of each individual sheet interacting with one
another, a hydrophobic interior is formed and this acts as a permeability barrier. Since
the fatty chains are not polar while the phosphate group is polar, when phospholipids are
in a water solution (which is polar) they spontaneously organize in structures where the
lipid chains are not in contact with water. The hydrophilic head groups interact with the
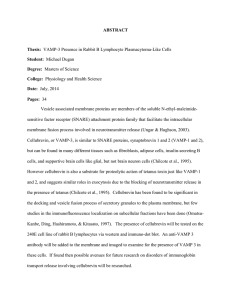
aqueous medium on both sides of the bilayer (Fig. 1.3). In fact, this kind of configuration
3
Introduction
minimizes the surface energy that arises from the interaction between polar and nonpolar molecules. These objects are highly deformable, since thermal fluctuations can be
observed on floppy vesicles, but at the same time they are also very constrained since
both the enclosed volume and the surface are conserved during the deformation. These
singular properties lead to rich behaviour when submitted to hydrodynamical stresses.
Figure 1.3: The vesicle membrane is made by a lipid bilayer. The hydrophilic head groups
interact with the aqueous medium, while the hydrophobic tails of each individual sheet
interact with one another.
Owing to the high deformability of the membrane, the motion of vesicles is really
different from that of rigid particles or simple droplets. Compared with a rigid particle, large displacement fluid-structure interactions are always involved in vesicle flow. A
good understanding of vesicle motion and deformation is essential both for fundamental
research and industrial applications. The most important issue is to physically describe
the membrane and determine how energy changes as a result of physico-chemical modifications of the membrane or the environment. In other words, to describe and model the
behaviour of a vesicle under hydrodynamic forcing, we must especially understand how
the energy of the membrane depends on its shape, studying the response to mechanical
disturbances.
An object whose one dimension is very small compared to the other two, is generally
easier to bend than to stretch or shear. For example, a sheet of paper is really easy to
bend, but it is very difficult to deform other than bending. This is because a large bending
deformation imposes a low extension deformation. For a lipid membrane, it is not easy
to describe the bending as the membrane is not a continuous material in the thickness.
The membrane is modelled as a two-dimensional locally incompressible fluid having a
resistance to bending. This model can take into account that the response of a membrane
subjected to external forces is first a response to bending, since the energy associated with
this deformation is much lower than the energy associated with extension. The modelling
of the membrane thus concerns the aspect of bending energy. Different models have been
proposed to describe the bending of such a membrane. A fist minimal approach was
introduced by Canham (1970), considering the membrane as a bended surface S with
4
Introduction
zero thickness, whose energy is:
M
=
Ebend
κ
2
Z
S
(c1 2 + c2 2 )dS =
κ
2
Z h
S
i
(2H)2 − 2K dS
(1.1)
In this expression c1 and c2 are the principal curvature of the surface, H and K are
respectively the mean and the Gaussian curvature, defined as:
H=
c1 + c2
2
and
K = c1 c2
(1.2)
and κ is the bending modulus.
A more efficient description was proposed by Helfrich (Helfrich, 1973). In this case
the energy is expressed as
SC
Ebend
=
κ
2
Z
S
(2H − c0 )2 dS + κG
Z
KdS
(1.3)
S
This model, called "spontaneous curvature model" (SC), introduces a spontaneous
curvature c0 and a second bending modulus κG , called Gaussian bending modulus. Spontaneous curvature can be interpreted as a possible asymmetry between the two monolayers
(e.g., due to different lipids in the presence of various ions on either side of the membrane,
...). Mathematically, we can find an equivalence between the two proposed approaches by
putting κG = −κ and c0 = 0.
Nevertheless, whatever the value of the modulus of Gaussian curvature, the equilibrium shapes of the minimal model are the same as those of the SC model where the
spontaneous curvature is equal to zero. In fact, from the Gauss–Bonnet theorem, the
integral of the Gaussian curvature
Z
KdS
(1.4)
S
is a constant that depends only on the topology of the surface. Topological changes
(division, fusion or pore formation) are possible but rare, since related to processes that are
energetically disadvantaged. For this reason in this work they are disregarded. Excluding
topology changes, the energies are the same, except for a constant, which does not affect
the bending minimum. This important result implies in particular that the force density
linked to bending is the same for these two modellings. For the module κ, which is the
only important in the study of the dynamics of a vesicle, a typical value is of the order of
15KB T .
In addition to bending, two other specificities of a vesicle must be considered. First, the
phospholipid membrane is semi-permeable: small molecules such as water molecules can
pass through, while large molecules or ions can not pass through. As a consequence, any
difference in the concentration between the solution inside and outside the vesicle will lead
to osmotic forces. The vesicle thus changes the volume, and so the internal concentration,
in order to remove the osmotic pressure. Once the vesicle deflated, hydrodynamic forces
can lead to a pressure jump across the membrane and so to a further volume variation
but, since the time scale of this process is significantly higher than the typical time scale
of experiments, we can suppose that the inner volume is preserved.
5
Introduction
For a fluid membrane, the shear energy of the system can be neglected as the molecules
can move freely and relax any stress due to pure shear. Moreover, due to the high
interaction energy between the fatty chains and the water molecules on one side, and to
van der Waals repulsion between neighbours on the other, the phospholipids stay close
to each other at an approximately constant density: the membrane is then treated as a
two-dimensional incompressible fluid.
We can then summarize the properties of a vesicle as follows:
• the membrane possesses a bending energy, due to its finite thickness;
• the membrane has the the constraint of surface incompressibility, due to the uniform
density of phospholipids;
• the normal component of the velocity of the membrane is equal to that of the
adjacent fluid (i.e. the membrane is impermeable). As a consequence the inner
volume is conserved.
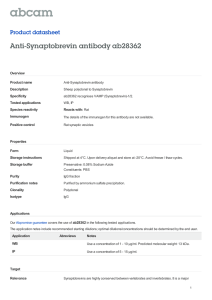
Since the surface and the volume of the vesicle are preserved over the typical time of
experiences, we can define a first important dimensionless number in the problem: the
excess area ∆. It measures the additional area of the vesicle compared to the sphere of
the same volume:
Figure 1.4: Relation between reduced volume and excess area for most common values.
In this work we are mainly interested in values of reduced volume v ∈ [0.6; 1].
A = (4π + ∆) R02
1/3
(1.5)
where R0 = V / 34 π
is the radius of the sphere with the same volume. Because of the
surface area conservation constraint, a spherical vesicle (∆ = 0) with fixed volume and
6
Introduction
surface will act as a rigid sphere. In order to deform the vesicle, it must be "deflated",
and this deflation is measured by the parameter ∆. An equivalent parameter is used
sometimes instead of excess area, namely, reduced volume, defined as
√
(1.6)
v = 3 4π V A−3/2
It defines the vesicle deflation as the ratio of the actual enclosed volume over the volume
of a sphere having the same surface area. As a consequence, v can range from 0 (totally
deflated vesicle) to 1 (sphere).
These two parameters are usually used in the literature. They are linked to each other
by the relation:
∆ −3/2
v = 1+
(1.7)
4π
shown in Fig. 1.4.
1.3.1
Equilibrium Shapes
Figure 1.5: Bending Energy associated with different families of solutions with respect
to the reduced volume. The global minimum is prolate for v ∈ [0.652; 1], oblate for
v ∈ [0.592; 0.651], and stomatocyte for v ∈ [0.05; 0.591]. (Seifert et al., 1991).
The Helfrich energy 1.3 has first been used to determine equilibrium shapes of a vesicle not subjected to external forces. As we have already seen in the previous section,
the constitution of closed double layers surrounding a water domain (vesicles) is a deeper
minimum in the energy of the system. This is why vesicles form spontaneously in a water
solution and are stable. In the simple case of the minimal model the phase diagram of
equilibrium shapes depends only on the reduced volume (see Eq. 1.5). The resulting
shapes are then axisymmetric and can be classified as: prolate, oblate and stomatocytes
(Fig. 1.5 ). It must be specified that in two dimensions there is no difference between
prolates and oblates, and stomatocytes do not constitute a configuration of minimal energy. In this work we are interested to study deformations of these common shapes, with
7
Introduction
specific attention to discocyte shapes typical of RBCs at rest, so we limit our investigation
to values of reduced volume in the range v ∈ [0.6; 1]. The different families of solution
are local minima of bending energy. It can be noted that many families of solutions may
coexist, but only one is the global minimum of the system. This one is therefore the
thermal equilibrium shape. Indeed, over long time, thermal fluctuations let the system
explore all possible configurations and therefore allow to select the configuration having
the lowest bending energy.
1.3.2
Vesicle in a fluid flow
The modelling of dynamics of a vesicle in flow needs to deal with three aspects :
i) Modelling of the membrane mechanical action
The membrane is assumed here to be a two-dimensional curved incompressible fluid,
resisting to bending. The Helfrich energy with c0 = 0 is chosen to model the bending
resistance. Using a Lagrange multiplier γ for the constraint of incompressibility,
divs u = 0
the free energy of the membrane Γ is then the sum of bending and surface incompressibility contributions and thus becomes:
F =
κ
2
Z
Γ
(2H)2 dS + κG
Z
KdS +
Γ
Z
γdS
Γ
From this energy model, we must then infer the membrane force exerted on the
fluid. As previously stated, the Gaussian curvature term is a constant and will not
contribute in the membrane force expression. It is obtained through the functional
derivative of F with respect to a small displacement of a given point of the membrane
(Seifert, 1999). The surface incompressibility contribution on the surface force density
is
f γ = −2γHn + ∇s γ
(1.8)
while the resistance to bending, characterized by a bending modulus κ ∼ 10−19 J (a
typical value for vesicles and RBCs (Scheffer et al., 2001)), leads to a surface force
density :
h
i
f b = κ 2∆s H + 4H(H 2 − K) n
(1.9)
where H is the mean curvature, K the Gaussian curvature, ∆s the Laplace-Beltrami
operator and n the surface normal vector pointing out of the vesicle. The total action
of the membrane is thus given by:
h
i
f m = f b + f γ = κ 2∆s H + 4H(H 2 − K) n − 2γHn + ∇s γ
(1.10)
The normal part of 1.10 is well-known from the stationarity condition of membrane
configurations (Zhong-can & Helfrich, 1989). The tangential part arises from inhomogeneities in the surface tension which will be needed to ensure local incompressibility
of the induced flow.
8
Introduction
ii) Modelling of the fluid’s flow
Now the evolution equation for the fluids in the interior and in the exterior of the
vesicle has to be considered and coupled with this force and with the various boundary
conditions. The conservation of the momentum is given by the Cauchy equation:
ρ
Du
= ∇ · σ + fv
Dt
(1.11)
where ρ is the density of the fluid, u is the fluid velocity, σ is the stress tensor and
f v is the bulk force density. The stress tensor σ is defined as the force density f
acting on a surface , defined by its normal n, of a small material element
σij = fi nj
(1.12)
It represents the response of the system to external forces, and contains thus all the
information for the description of the motion.
For a Newtonian fluid the stress tensor
can be written as σ = −pI + η ∇u + ∇T u where p is the pressure, η the viscosity.
If the density is constant in time and uniform in space, the conservation of the mass
simply reads:
∇·u=0
(1.13)
Combining previous expressions, we obtain the Navier-Stokes equation 1.11 describing the motion of a Newtonian and incompressible fluid.
The description of vesicles deformations is a fluid-structure interaction problem in
Stokes regime, due to the microscopic scale. In the case of a vesicle immersed in an
external fluid, the characteristic length is given by the radius of the vesicle, of the
order of L ∼ 10µm, the viscosity is η ∼ 10−3 P a s and the density ρ ∼ 103 Kg m−3 . A
typical velocity in the available experimental data is 10µm s−1 , leading to a Reynolds
number of the order of Re ∼ 10−4 ≪ 1. So the problem is governed by the Stokes
limit of the Navier-Stokes equation 1.11 for the flow of ambient fluids, the internal
(i) and the external (e) one:
∇ · σi,e + ρi,e g = 0
(1.14)
∇ · ui,e = 0
(1.15)
If the density contrast between the interior and exterior of the vesicle is not zero,
the contribution of buoyancy can be included into a modified pressure term p̄i/e =
pi/e + ρi/e gz, such that the hydrodynamics of the system obeys to the equation
∇ · σ̄i,e = 0 , ∇ · ui,e = 0
where
σ̄i,e = −p̄i/e I + η ∇ui/e + ∇T ui/e
(1.16)
(1.17)
In this flow regime, where advective inertial forces are small compared with viscous
forces, it can be shown that the dynamics equation are elliptic. In a domain D the
9
Introduction
hydrodynamic solution (u, p) depends only on the boundary conditions imposed on
∂D. In our problem, the two boundaries are: the interface (the membrane) and the
outer boundary of the system.
For the last condition, we require an imposed flow u∞ on the outer boundary ∂D+
of the system, which writes :
lim u = u∞
(1.18)
x→∂D +
for the open part of the outer boundary and
u = uw = 0
(1.19)
for a non moving rigid wall.
iii) Coupling conditions between hydrodynamical fields and the membrane
First of all, velocities are continuous at the interface
ue (x) = ui (x) = uΓ
(1.20)
where Γ represents the interface and uΓ the velocity field of the membrane. Moreover,
there is no flux through the membrane, because it is assumed impermeable :
∂x
= uΓ
∂t
(1.21)
so the membrane velocity is the same as the fluid velocity on the membrane.
Finally, the membrane is assumed at quasi-static mechanical equilibrium with the
hydrodynamic stresses. Thus, the membrane force density f m is balanced with the
hydrodynamic force per unit area [[σ]] · n as given by
0 = [[σ]] · n + f m = [[σ̄]] · n + f m + fg
(1.22)
[[σ̄]] · n = (σ̄e − σ̄i ) · n , fg = −∆ρgzn
(1.23)
where fg is due to the jump in pressure resulting from the difference of the densities
∆ρ = ρi − ρe and g = −gez .
Finally, the problem can be expressed in terms of independent dimensionless parameters using the following reference quantities:
• lref = R0 = V / 43 π
1/3
, radius of the sphere with the same volume ;
• tref = ηR03 /κ viscous damping time of a bending disturbance ;
• fref = κ/R03 typical density bending forces per unit area ;
10
Introduction
So all the physical quantities can be written as (the tilde indicates a dimensionless variable):
x = Rref x̃
t = tref t̃
u = Rref /tref ũ
f = fref f˜
(1.24)
γ = fref Rref γ̃
In the following, only dimensionless variables are used, and the tilde is omitted for clarity.
1.4
Objectives and organization of the work
The shape of soft bodies under flow is governed by strong non-linear coupling between
hydrodynamic stresses and elastic restoring forces. The latter are often linked with specific
interface properties, like surface tension, or bending and shear elasticity of an elastic or
liquid membrane. Moreover, the mechanical response of cells to the local flow is potentially
important in many biological processes.
A simple method to measure the mechanical properties of cells membrane is to flow the
cell suspension into a microfluidic channel with cross dimension of the same order as the
cell size (Lefebvre et al., 2008). In the case of vesicles, large deformations can be generated by the hydrodynamic forces and boundary confinement. By using vesicles velocities
and profiles, the membrane mechanical properties can be determined by comparison of
experimental and numerical results. Experimental studies have shown that most commonly stationary vesicle’s shapes in cylindrical capillaries are axisymmetric bullet and
parachute like shapes (Vitkova et al., 2004).
The majority of slow viscous flow numerical studies have focused on situations where
the fluid media extends to infinity in all directions. In real situations, however, and
especially in biological processes, the fluid is often bounded by rigid boundaries or free
surfaces. When these external walls are placed at a finite distance from the particle, they
can affect significantly the particle motion. The long-standing wish to describe, analyse,
and predict the motion of deformable particles in vessels and capillaries has motivated
also a large number of theoretical and computational models.
A BIM axisymmetric model to study the transport of capsules in a capillary was described in Quéguiner & Barthès-Biesel (1997). An axisymmetric Green’s function taking
into account the no-slip condition at the wall have been proposed in Ascoli et al. (1989)
for the case of a flat wall perpendicular to the flow, and in Pozrikidis (1992a) for a train
of drops or red blood cells in a circular pipe. For what concerns single vesicles most studies focus on 3D unbounded Poiseuille flow or 2D confined systems (Kaoui et al., 2011;
Farutin & Misbah, 2011). However, it is questionable that the simplified 2D models can
provide quantitatively accurate results of the motion of a vesicle which is inherently threedimensional. It is then necessary to construct a fully 3D model of vesicle flow, especially
when the 3D effects need to be taken into account.
An original 3D numerical method based on the Boundary Element Method (BEM)
has already been developed and validated for the simulation of a vesicle immersed into an
11
Introduction
Figure 1.6: Example of a three-dimensional mesh used to model the tether formation
(Boedec, 2011). The original mesh is refined, new nodes and new triangular elements are
added to reach a good description of the tube surface.
infinite fluid (Boedec et al., 2011b,a), with particular attention to sedimentation shapes
(Boedec et al., 2011b) (Fig 1.6). This method is very interesting because it uses the
structure of the Stokes equation to reduce the resolution of the problem on the volume to a
problem involving only the domain boundaries (Pozrikidis, 1992a). The advantage of this
method is that it eliminates the volume mesh and let us consider only the interface. That
greatly simplifies the problem interface tracking. Thereby it allows an highly precision
Lagrangian tracking.
However, some calculations are very expensive in 3D. The paradigm of this situation
is the emergence of a tether (Kantsler et al., 2008; Zhao & Shaqfeh, 2013; Huang et al.,
2011; Boedec et al., 2013), a tube of submicroscopic characteristic size and great length,
almost a factor 100 respect to the characteristic size. For instance, if the mother vesicle
has an unit size, the tube has a radius of the order of 1/10, while its length may exceed
10 (Boedec et al., 2013). Another case occurs when the vesicle interacts with a wall.
Experimental results on a vesicle adhering to a substrate show that the thickness of the
lubrication film between the vesicle and the wall is the order of 1/200 respect to the vesicle
typical size (Chatkaew et al., 2009). Another example, well-known in the capsules field,
is the study of vesicle motion in a capillary. In this case, for really deflated vesicles and
large flow velocities, the lubrication film is not optically measurable and therefore strictly
lower than 1/10 of the vesicle size. All these examples show that in order to model the 3D
behaviour of this objects, the number of nodes should be highly increased. A commonly
admitted crude rule is that the lubrication film is properly described when the distance
between two adjacent nodes is smaller than the thickness of the film. Thus if one wishes
to accurately determine the dynamics in the lubrication film, it is necessary to greatly
increase the number of nodes and thus the size of the matrices to handle.
12
Introduction
In these case it is convenient to take advantage of the symmetry of the problem and
use an axisymmetric model, in order to perform computations with higher efficiency. For
this reason an axisymmetric extension of the 3D free space model has been implemented.
In the chapter 2 we first briefly recall the principle of the 3D model of Boedec et al.
(2011b) and the discretization of the main operators. It has already been used as a base
for the development of the axisymmetric model. Since the axisymmetric extension has
never been presented, we will provide several validations comparing axisymmetric results
to 3D shapes already obtained in the case of settling vesicles and vesicles under the action
of an unbounded Poiseuille flow. In the same section, we present an optimisation of the
3D code, in order to reduce the computational time. If we want to take into account the
complex structure of the RBC cytoskeleton we need that the 3D code is optimized as
much as possible. Another limit of the existing three-dimensional model is that it can not
take into account a different viscosity between the interior of the vesicle and the external
fluid. At the end of the chapter, the case of a viscosity contrast is also discussed, both
for the three- dimensional and for the axisymmetric model. However, we will see that the
viscosity contrast λ, even if it strongly modifies the dynamics, plays no role on the final
shape.
We present in chapter 3 new numerical implementations to simulate the vesicle adhesion on flat substrates. This first step is necessary to understand the interaction between
the particle membrane and a solid boundary in the simple case of the vesicle sedimentation towards a plane wall. Also in this case, we briefly compare three dimensional results
with those obtained using the axisymmetric formulation. Finally, preliminary results on
the parametric study of adhesion process of a vesicle on a flat surface are presented. It
will be shown that adhering (or bound) vesicles can exhibit a large variety of different
shapes. This section is not largely developed since our main interest concerns the more
complex cylindrical geometry, more related to the RBCs circulation in human capillaries,
which is studied in the next section.
The numerical methods, used to describe the behaviour of a vesicle subjected to a
Poiseuille flow inside a narrow capillary, are detailed in chapter 4. In this case the term
u∞ of Eq. 1.18 is chosen as the Poiseuille velocity:
∞
u
= uP
r2
1− 2
Rc
!
(1.25)
where uP is the intensity of the imposed Poiseuille flow velocity and Rc is the capillary
radius. A new dimensional number, the bending capillary number, can then be introduced
Ca = η uP R02 /κ
(1.26)
reflecting the intensity of the stress exerted on the vesicle. It replaces the capillary
number Ca = ηV /γ, where γ is the surface tension usually used for the drops. The
same chapter contains also several sections, each one dedicated to a different numerical
code. Fist we describe and validate the axisymmetric Green’s function in a circular pipe.
We also take into account the possibility of meshing the wall, comparing computational
efficiency of both methods. Then we propose a 3D formulation of the problem, discussing
the advantages and the drawbacks of such a description. Thus we compare our results to
13
Introduction
experiments on vesicles in a confined Poiseuille flow. Finally we study the shape transition
from bullet to parachute like shape changing the three important control parameters: the
deflation, the confinement and the flow velocity.
In the last chapter (Chapter 5) we finally propose the description of a new approach
for simulating RBCs behaviour in a fluid, based on the model already described in the
previous sections. A special attention is given to the equilibrium position of the spectrin
network nodes in the discocyte equilibrium shape. Next we provide the simulation results
on sedimentation of an initially prolate shape for increasing values of network connecting
forces as a benchmarking test and finally we present the motion and the deformation of a
single RBC in bounded Poiseuille flows and describe the factors affecting the deformation
of a single RBC in Poiseuille flows.
14
Introduction
Notation
Definition
x
u
p̄
ρ
η
γ
H, K
∇s
∆s
fm
fb
fγ
G
M
T
Z
fi
n
λ
κ
κG
u∞
R0
uP
RP
C
Rc
B0
Ca
β
ξα
ξ 1,e , ξ 2,e
{N|en }
aαβ
fn
N, M
n, m
lnp
µ0
cf
Πn
Πt
position of the interface
velocity field
pressure including the hydrostatic pressure
fluid density
fluid viscosity
surface tension
Gaussian and mean curvature
surface gradient
surface Laplacian
force density generated by the membrane
bending contribution to fm
tension contribution to fm
three-dimensional Green’s function
axisymmetric Green’s function
three-dimensional stress tensor
axisymmetric stress tensor
i-th component of the vector f
normal vector
viscosity contrast
bending modulus
Gaussian bending modulus
imposed velocity far from the vesicle
typical size of the particle
Poiseuille flow strength
Poiseuille flow radius
curvature of the velocity profile
capillary radius
bond number
capillary number
capillary confinement
surface parametrisation
local parametrisation of the element e
interpolation function on the element e
inverse of the local metric
value of the function f on the node n
number of 3D mesh nodes and elements
number of axisymmetric mesh nodes and elements
length of the link connecting vertices n and p
shear modulus of the red blood cell membrane
viscous friction coefficient
projection operator on the normal plane
projection operator on the tangent plane
Expression
u = ẋ
p̄i/e = pi/e + ρi/e gz
fm = fγ + fb
cf. eq. 1.9
cf. eq. 1.8
cf. eq. 2.2
cf. eq. 2.2
λ = η i /η e
cf. eq. 2.64
cf. eq. 2.62
cf. eq. 1.26
cf. eq. 4.1
aαβ =
∂xi ∂xi
∂ξ α ∂ξ β
Πn = n ⊗ n
Πt = 1 − n ⊗ n
Table 1.1: Definition of most important notations used in this work.
15
Chapter 2
Free Space Model
2.1
Introduction
Many innovative methods let us simulate moving interfaces into fluid flows such as Volume
of Fluids (VOF), Immersed Boundaries (IBM), Front Tracking (FT), Phase Field (PF),
Level Set (LS), Lattice Boltzmann (LB). In studies focusing on giant vesicles in fluid flows,
numerical models built with the boundary integral method (BIM) have proven to be the
most accurate, as long as the Stokes flow regime and Newtonian fluids are concerned.
The BIM has been applied to a lot of different problems in Stokes flow. Examples include
oscillations of a gas bubble (Nadim, 1997), bursting of a bubble near to a wall or a free
surface (Boulton-Stone & Blake, 1993), flow of a viscous fluid film over a shaped surface
(D. TSELUIKO & VANDEN-BROECK, 2008) and break-up of a viscous liquid jet. 3D
BIM-models have been developed and applied to many problems concerning the dynamics
of red blood cells and their biomimetic counterparts in fluid flows; see Li et al. (2013);
Abreu et al. (2014); Vlahovska et al. (2013) and references therein.
Using the linearity of Stokes equation, the velocity can be decomposed into an external
flow field u∞ and a perturbation flow field um due to the force density f m generated
by the membrane. For a rigid particle Ω of boundary ∂Ω embedded in a viscous fluid
of dynamic viscosity η, the j th Cartesian component of the velocity u at a point x0 not
lying on the interface ∂Ω is then provided by the following integral relation:
1
fi (x)Gij (x, x0 )dS
8πη ∂Ω
Z
1
ui (x)Tijk (x, x0 )nk (x)dS
+
8π ∂Ω
uj (x0 ) = u∞
j −
Z
(2.1)
where Gij is the free space Green’s function (also called Stokeslet or Oseen-Burgers tensor)
and Tijk is the free space stress tensor (also called Stresslet):
δij
x̂i xˆj
+ 3
r
r
x̂i xˆj xˆk
Tijk (x, x0 ) = −6
r5
Gij (x, x0 ) =
17
(2.2)
Free Space Model
with the normal unity vector n directed outside Ω, x̂ = x − x0 , r = kx̂k, and δij is
the Kronecker delta. The first integral on the right-hand side of Eq. 2.1 represents the
flow due to a surface distribution of point forces of density f on ∂Ω. The second integral
represents the flow due to a double-layer potential of density u.
In the presence of an internal boundary (i.e. interface) separating two different fluids,
the integral equation 2.1 can be written as a Fredholm integral equation of the second
kind (Pozrikidis, 1992a) for the velocity at a point x0 lying on the interface ∂Ω:
uj (x0 ) =
1
2
u∞
∆fi (x)Gij (x, x0 )dS
j −
λ+1
4πη1 (λ + 1) ∂Ω
Z PV
(1 − λ)
+
ui (x)Tijk (x, x0 )nk (x)dS
4π(λ + 1) ∂Ω
Z
(2.3)
where λ = η i /η e is the viscosity contrast between the inner and the outer fluid, ∆f =
e
i
(σ − σ ) · n is the viscous stress jump at the interface and P V denotes the principal
value of the second integral on the right-hand side of Eq. 2.3, called the double-layer
integral. It’s important to note that in the case of equal inner and outer viscosity, λ = 1,
the second term of Eq. 2.3 vanishes and the velocity field is completely determined by
the force discontinuity at the interface.
An interface is active when ∆f is finite, and inactive or passive when ∆f = 0. An
active interface plays a leading role in determining the dynamics of the flow, whereas a
passive interface is simply advected by the ambient flow. The vesicle membrane is an
active membrane and the mechanical equilibrium condition at the interface is given by
Eq. 1.22:
e
i
(2.4)
(σ − σ ) · n +f m = 0
|
{z
∆f
}
Using the Boundary Element Method, a code modelling vesicles in a flow has been
developed during the years in our research group (Boedec et al., 2011b,a). Our model
is able to simulate the behaviour of free-space vesicles in the case of unitary viscosity
contrast λ between the inner and the outer fluid. The case of sedimenting vesicles has
been especially considered. So at the begin of the present research both a 3D version and
an axisymmetric extension already existed, although for the last one the development
principles as well as its validation have never been published.
This chapter is organized as follows. In the section 2.2 we first briefly recall the
principles of the 3D model already presented in Boedec et al. (2011b) for vesicles in free
space (unbounded) flows. We present also new routines for solving transport equations,
the evaluation of their performance and accuracy. This optimisation let us considerably
decrease the numerical cost of our three-dimensional algorithm and it will serve as a
starting point for further developments, presented in chapter 5, to describe the behaviour
of a RBC in a fluid. We introduce then in section 2.4 the axisymmetric extension of the
3D model, with more details since, as mentioned previously, it has never been published.
Moreover, we add many validation examples. Thus, after presenting the basic structure of
the model, we provide a validation by comparison with three-dimensional vesicles shapes.
Finally, in section 2.5, the development of a more general formulation taking into account
18
Free Space Model
Figure 2.1: Example of a three-dimensional mesh composed by 1280 triangular elements.
The mesh is constructed by refining the triangular faces of an icosahedron inscribed into
a sphere by dividing recursively each triangle into four smaller triangles and projecting
the resulting nodes to the surface of the sphere.
the viscosity contrast between the outer and the inner fluid is presented, both for the
three-dimensional model and the axisymmetric one.
2.2
Free space 3D BEM model
We first briefly recall the principles of the 3D model of Boedec et al. (2011b), which
will serve as a base for the development of the axisymmetric model. For details see
Boedec et al. (2011b).
The boundary integral equation 2.3 with λ = 1 is discretized over a surface mesh
consisting of a set of planar triangular elements (Fig. 2.1). To obtain the computational
domain we use the method of uniform triangulation to discretize the initially spherical
membrane into a uniform triangulated mesh.
The integral equation 2.3 writes then:
uj (x0 ) −
u∞
j (x0 )
1
=
8πη
=
1
8πη
Z
fim (x)Gij (x, x0 )dS
∂Ω
N
el Z
X
e
e=1 ∂Ω
(2.5)
fim (x)Gij (x, x0 )dS e
where e indicates the element e of the discretization.
19
Free Space Model
On each element, all the variables of the system are represented as follow:
f|e (ξ 1 , ξ 2 ) =
NX
nodes
N|en (ξ 1 , ξ 2 )f n
(2.6)
n=1
where (ξ 1 , ξ 2 ) is the element parametrisation, N|en the interpolation functions on the element e and f n the value of the field f on the node n, with Nnodes the number of nodes
on a single element. A linear interpolation is adopted, so the interpolation functions are:
N1 (ξ 1 , ξ 2 ) = 1 − ξ 1 − ξ 2
N2 (ξ 1 , ξ 2 ) = ξ 1
1
2
N3 (ξ , ξ ) = ξ
(2.7)
2
In order to compute integrals on each element we write:
Z
∂Ωk
∆fi (x)Gij (x, x0 )dS k
= Jac
Z
nodes
ξ 1 =1 Z ξ 2 =1−ξ 1 NX
ξ 1 =0
ξ 2 =0
(2.8)
n 1 2
∆fin N|k
(ξ , ξ )Gij (x(ξ 1 , ξ 2 ), x0 )dξ 1 dξ 2
n=1
where Jac is the determinant of the Jacobian matrix describing the geometric transformation from the reference element to the real one. In the case of linear elements the
Jacobian is constant and it is the ratio between the surface (Ae ) of the real element and
the surface of the reference element: Jac = 2Ae .
The numerical integration of (2.8) is done differently whether the source point x0 is on
the element or not. If the source point x0 is not located on the element, Green’s function
is regular and therefore the numerical integration is performed with a classical GaussHammer quadrature with 12 points. In cases where the source point x0 is located on the
element, the integral is weakly singular (Green’s function diverges like 1/r, where r is the
distance to the source point). The integration should be modified in order to be able to
properly calculate numerically, by introducing polar variables on the element. In this way
a term r appears in the surface element and it therefore delete the singularity (Pozrikidis,
1992a, 2002). Singular integrals are calculated using a Gauss-Legendre quadrature with
7 points for each coordinate.
We can finally write a matrix relationship between velocities and surface forces on the
mesh nodes:
.
.
.n
u
i
..
.
..
.
= (u∞ )n + G ∆f n
i
i
..
..
..
.
.
.
(2.9)
where n is the node number in the triangulation, i indicates the ith Cartesian component
and G is a matrix resulting from the numerical integration of the integral in (2.3).
Using Eq. (1.10) we can split contributions due to bending forces and surface tension
into two different matricial operators F b acting on the vector containing the nodal values
20
Free Space Model
of positions and F γ acting on the vector of nodal values of γ, obtaining:
.
.
.n
u
i
..
.
..
.
= (u∞ )n
i
..
.
.
.
b .n
+ G F x
i
..
.
.
.
.n
γ
+F γ
..
.
(2.10)
where the tension γ is such that the total velocity field (2.10) satisfies the surface
incompressibility constraint. In a matricial form it reads:
.
.
.
γ n
DGF γ
..
.
..
.
+ D (u∞ )n
i
..
.
.
.
.n
b
+ GF x
i
..
.
= 0
(2.11)
where matrix D defines the surface divergence operator applied to nodal values of velocity.
Inverting this expression in order to eliminate γ the velocity on the interface is finally
given by:
.
.
.n
u
i
..
.
..
.
= Id − GF γ [DGF γ ]−1 D (u∞ )n
i
..
.
.
.
.
+ GF b xn
i
..
.
(2.12)
In order to discretize in time the equation of interface evolution, an explicit time
stepping algorithm would result in severe constraints on the time step, growing with
increasing resolution of the mesh. It is then necessary to use a semi-implicit time scheme
to keep computations at a reasonable cost, computing stiff bending forces at the updated
position x(t + dt). Using a semi-implicit time stepping algorithm also improves long
term stability of the algorithm: spurious modes which could lead to shape degeneracy
are correctly damped by the implicit treatment of the bending forces. This semi-implicit
time scheme can be used for the axisymmetric model as well.
Computation of geometric properties such as the normal vector and mean curvature
on a discrete representation of a surface is a long-standing issue arising in various contexts: computer graphics, numerical simulations of interfacial phenomena (drop, bubble,
vesicle etc.). Indeed, the definition of these properties involves first and second order
derivatives of the position, and direct computation is thus prohibited on C 0 representation of the interface. However, this difficulty has been overcome in Boedec et al. (2011b)
by using discrete estimates of the operator acting on smooth surface. The computation
of the curvature vector (mean curvature times the normal vector) follows the approach
of Meyer et al. (2002) and the principle has been extended to the computation of the
bending forces that involves in turn the second derivative of the the mean curvature.
The surface Laplacian for a scalar field f on each node n of the triangulated surface
mesh is expressed in terms of the flux of the surface gradient of f on the contour ∂S of a
small patch of surface surrounding the node.
1
< ∆ s f >n =
S
Z
∂S
∇s f · νdl =
X Z
e∈E n
∂S e
∇s f e · ν e dl
(2.13)
21
Free Space Model
E n is the subset of elements of the C 0 triangulation connected to the node n, ∂S e is the
restriction of ∂S on the element e and ν e is the tangent vector to the surface, normal to
∂S e .
In Boedec et al. (2011b) contours ∂S are made of segments passing through the midpoints of the elements’ edges that have been used.
With triangulated surfaces, surface parametrization is available piecewise in the form
of element local coordinates. Thus, the computation of surface gradient is performed
with global Cartesian components of vectors and derivatives with respect to element
coordinates. The surface gradient of a scalar field f is given on each element by
∂f e ∂xe
∂ξ α ∂ξ β
∇s f e = aαβ
(2.14)
∂xi ∂xi
where ξ α (α = 1, 2) are the element local coordinates and aαβ = ∂ξ
α ∂ξ β are the component
of the inverse of the corresponding local metric.
With C 0 piecewise linear approximation, all derivatives with respect to element coordinates take constant values, thus leading to constant values of ∇s f e over each element.
In this way the i-th component of the curvature vector and the surface Laplacian of
the mean curvature are computed by
< Hni >n =
X Z
∇s xei · ν e dle
(2.15)
X Z
∇s H e · ν e dle
(2.16)
e∈E n
< ∆s H >n =
e∈E n
∂S e
∂S e
where xei and H e are linear interpolation on the element of the corresponding nodal values
of xi and H.
Note that Gaussian curvature K is computed only using a discrete version of the
Gauss-Bonnet theorem (Meyer et al., 2002), which states that the integrated value of K
is related to the external angle ǫe of the boundary. Finally the expression of nodal bending
forces as a function of nodal coordinates can be resumed in matrix form
.
.
.n
f
i
..
.
.
.
.n
b
=F x
i
..
.
(2.17)
Similarly, the surface divergence of the velocity vector field u on an element e is
constant, given by:
∂xe ∂ue
∇s · ue = aαβ α β
(2.18)
∂ξ ∂ξ
and the approximated nodal values are simply obtained by area weighted average
< ∇s · u >n =
22
X Ae
e∈E n
A
(∇s · u)e
(2.19)
Free Space Model
P
where Ae is the area of the element e and A =
velocity divergence can be cast in the matrix form
..
.
(∇s · u)n
i
..
.
e
Ae . Thus the expression of nodal
.
.
.n
= D u
i
..
.
(2.20)
The F γ matrix giving the nodal surface forces due to the surface tension γ is built in
the same way, with
< ∇s γ >n = (Id − n ⊗ n)
X Ae
e∈E n
A
(∇s γ)e
(2.21)
The projection operator ensures projections on the surface tangent plane at the node of
the membrane tension force.
2.3
3D code optimisation
In this section, a set of new routines for solving transport equations is presented, with the
evaluation of their performance and accuracy. All considerations are based on eqs. 1.21
and 2.10. The goal of this work was to accelerate this algorithm, changing, if necessary,
its solution scheme. All routines are written in Fortran-90.
Three basic solution procedures were implemented and evaluated:
• “scheme 0” – Coupled method;
• “scheme 1” – Fractional step method, see Annex 1;
• “scheme 2” – Dual Fractional step method, see Annex 2.
For these methods, different storage schemes were tested:
• for dense matrices only (using MKL routines);
• for the selective use of sparse matrices (using own parallel routines).
Equation for the coordinate variable x was solved by three different methods:
• direct MKL solver (DGESV or DGETRF/DGETRS);
• single precision with iterative refinement MKL solver (DSGESV);
• fully iterative solver based on the BiCGStab algorithm (own parallel routine).
Equation for the tension variable γ was always solved by the direct MKL routines
(DGETRF /DGETRI / DGETRS).
23
Free Space Model
Fractional step method
The following notation is used for coordinate and tension variables: ~x(k+1) , ~x(k) , γ (k+1)
, γ (k) . Then, the semidiscrete form of equations will look as:
1 (k+1)
~x
− ~x(k) = ~u∞ + GF b ~x(k+1) + GF γ γ (k+1)
∆t
(2.22)
D ~x(k+1) − ~x(k) = 0
Rewrite with q (k+1) = γ (k+1) − γ (k) :
(2.23)
I − ∆tGF b ~x(k+1) − ∆tGF γ q (k+1) = ~x(k) + ∆t~u∞ + ∆tGF γ γ (k+1)
D~x(k+1) = D~x(k)
(2.24)
(2.25)
Rewrite in the matrix-operator form, replacing RHS’s with r1 and r2 :
"
I − ∆tGF b
D
−∆tGF γ
0
#"
#
~x(k+1)
q (k+1)
=
"
r1
r2
#
#
=
(2.26)
Decompose into factors and write with the error term:
"
I − ∆tGF b
D
0
∆tGF γ
#"
−∆tGF γ
I
I
0
=
"
r1
r2
#
+
"
#"
~x(k+1)
q (k+1)
−∆t2 GF b GF γ q (k+1)
0
#
(2.27)
The first error term is O(∆t3 ) (since q (k+1) ≈ O(∆t)) that corresponds to the second
order accuracy of eq. 2.22. On the other hand, eq. 2.23 has no error term, i.e. it is solved
exactly for the time step k + 1.
The decomposed matrix-operator equation can be solved in two steps:
"
I − ∆tGF b
D
"
I
0
0
∆tGF γ
−∆tGF γ
I
#"
#"
~x(k+1)
q (k+1)
~x∗
q (k+1)
#
=
#
"
=
"
~x∗
q (k+1)
r1
r2
#
#
(2.28)
(2.29)
Finally, the new Fractional step (projection) algorithm will look as follows:
I − ∆tGF b ~x∗ = ~x(k) + ∆t~u∞ + ∆tGF γ γ (k)
24
DGF γ q (k+1) =
1
1
D~x(k) −
D~x∗
∆t
∆t
(2.30)
(2.31)
~x(k+1) = ~x∗ + ∆tGF γ q (k+1)
(2.32)
γ (k+1) = γ (k) + q (k+1)
(2.33)
Free Space Model
Dual Fractional step method
In order to increase the accuracy of the method, we may calculate the new value of γ
in steps 2.30, 2.31, 2.33, substitute it instead of the old value γ (k) and then repeat steps
2.30-2.33 of the original algorithm. The new Dual Fractional step algorithm will look as
follows:
I − ∆tGF b ~x∗ = ~x(k) + ∆t~u∞ + ∆tGF γ γ (k)
DGF γ q ∗ =
1
1
D~x(k) −
D~x∗
∆t
∆t
(2.35)
γ ∗ = γ (k) + q ∗
(2.36)
I − ∆tGF b ~x∗∗ = ~x(k) + ∆t~u∞ + ∆tGF γ γ ∗
DGF γ q (k+1) =
(2.34)
1
1
D~x(k) −
D~x∗∗
∆t
∆t
(2.37)
(2.38)
~x(k+1) = ~x∗∗ + ∆tGF γ q (k+1)
(2.39)
γ (k+1) = γ ∗ + q (k+1)
(2.40)
In this case, splitting error for eq. 2.22 will be proportional to (γ (k+1) − γ ∗ ) which is
much less than (γ (k+1) −γ (k) ) in the original algorithm. In fact, for γ this algorithms works
as a predictor-corrector scheme that resembles the second order Runge-Kutta method.
Additional steps 2.37,2.38,2.40 of the algorithm don’t increase computational time
much because they can use the decomposed matrices from steps 2.34,2.35.
In case if more accurate solution for γ (k+1) is required, it can be calculated directly
from ~x(k+1) :
DGF γ γ (k+1) = −D ~u∞ + GF b ~x(k+1)
(2.41)
This expression replaces step 2.40. It can also use the decomposed matrix from step
2.35.
2.3.1
Analysis of performance
For evaluations, test matrices G, F b , F γ , D and vectors u∞ , x(k) , γ (k) were used as
input parameters. Matrix and vector size parameters are: n = 2562 (number of nodes),
N = 7686 (number of components). All test measurements were done on Xeon X5675
processors (6 cores, 3.066 GHz) and, selectively, on bi-processor nodes (12 cores). Verification and evaluation of accuracy was performed in comparison with the solution of the
same problem by the original Java code. New solution routines demonstrate high increase
of computational speed in comparison with the original Java implementation: up to 15
times when MKL solvers are used, and about 50 times when the BiCGStab algorithm is
applied.
The original Java-based algorithm is implemented straightforwardly, with the use of
MKL routines for O(N 3 ) operations – such as matrix multiplications and LU-decompositions
(or inversions). Total cost of this algorithm can be estimated as about 7N 3 floating point
25
Free Space Model
operations (here and below it is assumed that n = N/3). Total solution time for one
time-step is between 50 and 60 seconds (no accurate measurements of the original unchanged algorithm were performed). This time includes some overhead of Java-to-MKL
data conversion. Reference time for N 3 operations can be estimated as 8.5 s (including
this overhead).
In the new straightforward MKL-based implementation of the coupled solution procedure (variant “0a”), the number of operations was reduced to 5.2N 3 owing to the
accurate grouping of O(N 3 ) operations and avoiding (when possible) mutual multiplications of N × N matrices. As a result, total solution time was reduced to 36 seconds.
Reference time for N 3 operations is in this case about 7 s (now there is no overhead of
data conversion).
The similar MKL-based implementation of the Fractional step method (variant “1a”,
see Annex 1 for details) needs about 3.6N 3 operations and takes 24.4 seconds, i.e. not
much less than the previous algorithm. However, this scheme is more suitable for further
optimizations and therefore is more attractive.
The next performance reserve is using sparse matrices (when possible). Here, matrices
b
F , F γ , D are sparse in their nature: average number of non-zero elements in a row is 55
for F b and 21 in D (matrix F γ looks like a transpose of D and has 21 non-zero elements
in a column). Thus, density of all these matrices is less than 10−2 , and “dense matrix
by sparse matrix” multiplications become about 20 ÷ 30 times faster. Due to this, the
number of O(N 3 ) operations is reduced to 0.7N 3 , and the solution time to 6.33 seconds
(variant “1b”). This time includes the matrix conversion overhead (about 0.1 s).
The remaining most time-consuming part (4.75 s) is solving the equation for x (e.g.
2.30). It can be reduced to 2.73 s by applying the MKL routine DSGESV that performs
the LU-decomposition in single precision (which costs two times less) with the following
iterative refinement of the solution vector. With the additional optimization of sparse
matrix operations, the solution time was reduced to 3.76 seconds (variant “1d”). For the
comparison, the same test was run with 12-thread parallelization on a bi-processor node.
The result is 2.35 seconds, i.e. 1.6 times faster than on a single 6-core processor. Further
optimization for bi-processor nodes is possible by taking into account their non-uniform
memory (NUMA) properties.
Another way to accelerate this step is to apply a fully iterative method. For the
suggested time-step values (between 10−6 and 10−5 ), the matrix (I − ∆tGF b ) possesses
good diagonal dominance in some test configuration, it varies from 7 : 1 to 100 : 1.
Additionally, the previous solution vector can be used as a first guess of the iterative
scheme in order to accelerate its convergence. Owing to this, the BiCGStab algorithm
usually needs only 4 iterations to achieve the machine level of accuracy. After changing
the time-step from 10−5 to 10−4 (in the same test configuration), the number of iterations
was increased to 9.
This BiCGStab solver was applied in the implementation of the more accurate Dual
Fractional step method (variant “2f”). The main computational core of the BiCGStab
is the multiplication of a matrix by a vector. Here, the main term in the LHS of the
equation is GF b x . This multiplication doesn’t require preparation of the matrix GF b .
Instead, two separate matrix-vector multiplications can be performed. As a result, the
26
Free Space Model
total cost of the algorithm (per time-step) is reduced to 0.98 seconds, despite the fact that
the equation for x should be solved twice in this method. This is the reference time for
a particular test configuration when BiCGStab requires 4 iterations in each of two calls.
Adding one iteration in each call increases the cost of the algorithm by 0.1 s.
On a 12-core bi-processor node, this variant processes one time-step in 0.65 second,
or about 1.5 times faster than on a single 6-core processor.
The final variant (“2g”, see step 2.41 ) implements more accurate solution for γ . It
takes 1.02 second for a time-step (in the above test configuration), i.e. only 0.04 s more
than the previous variant.
In the future, new combinations of basic solution procedures and underlying methods
can be built. In particular, if the iterative scheme is rejected for some reason, the Dual
Fractional step could be implemented with the (semi)direct MKL routines (variant “2d”,
estimated time 4 seconds). Similarly, the coupled procedure could be implemented with
the BiCGStab solver (variant “0f”, ≈ 5 ÷ 10 seconds).
2.3.2
Accuracy
First, accuracies of the coupled and Fractional step methods were compared using some
configuration of test matrices and time-step 10−5 (variants “0a”, “1a”, “2f”). All comparisons were performed using two types of norms: L∞ and RMS.
The data demonstrate that the Fractional step method (“1a”) has appropriate accuracy for x and that all methods are accurate to the second order. The latter is surprising
for the Euler-backward time integration scheme and can be explained by the suggestion
that the contribution of bending forces in the LHS is sufficiently low (in this test configuration).
On the other hand, temporal accuracy of the Fractional step method for γ is only
of the first order. This doesn’t seem generally critical. However, it was found that the
contribution of the coordinate correction step (see step 2.32) is too high, it exceeds 1/4 of
the full increment of the coordinate (x(k+1) − x(k) ). Due to this, the method was excluded
from further considerations in favour of the more accurate Dual Fractional step ("2f").
The latter method demonstrates very good coincidence of the results for x with the
coupled variant “0a” and the same order of the temporal accuracy for γ. Finally, if the
good coincidence for γ with “0a” is also required, another variant (“2g”) can be used.
Additionally, comparisons with the results of the original Java algorithm confirmed
that the new implementation of the coupled method produces very close results to the
original Java algorithm (up to machine accuracy), and that the Dual Fractional step
method has the same accuracy.
It was demonstrated in the above measurements that the solution time for the considered equations was reduced greatly, to the level from 1 to 4 seconds (depending on the
method). This is much less than the cost of the remaining part of the algorithm, which
can be estimated as 20 to 30 seconds. Therefore it is important to consider factors that
can limit performance of the full algorithm.
The first point is data formats and conversions between them. Modern processors
have limited memory performance in comparison with their computational speed. Therefore, data formats should be simple and compact, with contiguous processing of data
27
Free Space Model
elements and avoiding indirect addressing (when possible). Unnecessary copying of data
and conversions between different formats should be also avoided. There are also some
non-uniform memory (NUMA) considerations for multiprocessor computer systems.
The next point concerns optimization and vectorization of time-consuming parts of the
computational algorithm written in Java. If there are no appropriate library routines, it is
better to re-write such parts in Fortran or C and integrate them into the Java environment
with wrappers.
For the efficient parallelization, it is necessary to perform appropriate splitting of data
before distributing them between threads. In particular, portions of data (subdomains)
to be processed in different threads should be as large as possible to avoid inefficient data
accesses and to reduce synchronization overheads.
Generally, it is necessary to perform the analysis of efficiency of all time-consuming
parts and, when possible, to rewrite them in more regular manner.
Finally, in order to be able to efficiently adapt this code to new computer environments
(such as Intel Xeon Phi) it will be necessary to reduce non-parallel parts of the algorithm
as much as possible. For example, for 100+ thread parallelization, total share of nonparallel parts should be (much) less than 0.1%.
2.4
Free space axisymmetric BEM model
In this section we present the axisymmetric extension of the 3D model. After presenting
the basic structure of the model, we provide a validation by comparison with threedimensional vesicles shapes. This model represents also a first step for further developments, that will be presented in the next sections, to describe the interaction of a vesicle
with solid structures, such as a plane wall or the capillary boundaries, for axisymmetric
regimes.
2.4.1
Axisymmetric Green’s function in free space
In this section we present a simplified version of the boundary integral equation for axisymmetric flow configurations (see Pozrikidis (1992a)). Thus none of the variables is a
function of the azimuthal angle φ. Moreover we will only consider axisymmetric flow with
no swirling motion, thus velocity and force vector fields do not have any azimuthal component. The integral over ∂Ω in (2.3) can then be explicitly integrated in the azimuthal
angle φ, reducing the 3D problem to a 2D one, namely the determination of the radial
and axial components of the velocity ur (r, z) and uz (r, z) in an azimuthal plane. Working
in the x − z plane, we have thus the correspondence x with r, ur with ux and y = uy = 0.
In order to reduce the number of unknowns, we use polar cylindrical coordinates and
write dS = r dφ dl, where dl is the differential arc length of the trace of the boundary in
the x − z azimuthal plane, and apply Eq. (2.3) at a point x0 in the azimuthal plane.
Performing the boundary integrations in the azimuthal direction, we obtain:
uα (x0 ) =
28
u∞
α (x0 ) +
1
8πη
Z
Γ
Mαβ (x0 , x)fβ (x)dl(x)
(2.42)
Free Space Model
where x0 = r0 er + z0 ez , x = rer + zez , the Greek subscripts α and β are either r or z,
indicating the radial and axial components respectively. The term u∞
α is the α component
of the imposed external velocity field. Γ is now the trace of the membrane interface in the
plane (r, z), dl the differential arc length on Γ, fβ the β component of viscous strain jump
at the interface and Mαβ is the azimuthal angle integration of the 3D Green’s function.
In order to find the explicit expression of the matrix M , we follow the approach
proposed by Pozrikidis (1992a). Below we briefly highlight the main steps. M is given by
M (x0 , x) =
"
Mrr Mrz
Mzr Mzz
#
=r
Z
2π
0
"
Gxx cos φ + Gyx sin φ Gzx
Gxz cos φ + Gyz sin φ Gzz
#
dφ
(2.43)
Substituting x = r cos φ, and y = r sin φ into the right-hand sides of Eq. (2.43) we
find
#
"
ẑ(rI31 − r0 I30 )
I11 + (r 2 + r02 )I31 − rr0 (I30 + I32 )
(2.44)
M =r
I10 + ẑ 2 I30
ẑ(rI30 − r0 I31 )
where ẑ = z − z0 and
Imn (ẑ, r, r0 ) ≡
Z
2π
0
cosn ω
dω
[ẑ 2 + r 2 + r02 − 2rr0 cos ω]m/2
(2.45)
The Imn can be expressed in terms of complete elliptic integrals of the first and second
kind:
F (k) =
π/2
Z
π/2 (1 − k2 cos2 ω)1/2
0
E(k) =
dω
Z
0
2
2
1 − k cos ω
1/2
(2.46)
dω
where the argument k is defined as (Pozrikidis, 1992a) :
k2 =
(ẑ)2
4rr0
+ (r + r0 )2
(2.47)
To compute these elliptic integrals we use polynomial approximation (Abramowitz & Stegun,
1972) :
h
i
h
i
F (k) = a0 + a1 k1 + ... + a4 k14 + b0 + b1 k1 + ... + b4 k14 ln (1/k1 ) + ǫF
h
i
h
i
E(k) = 1 + c1 k1 + ... + c4 k14 + d1 k1 + ... + d4 k14 ln (1/k1 ) + ǫE
(2.48)
with k1 = 1 − k2 , |ǫF | ≤ 2.10−8 , |ǫE | < 2.10−8 .
29
Free Space Model
2.4.2
Axisymmetric vesicle model
In the axisymmetric case the membrane is discretized by C 0 piecewise linear 2D elements,
leading to the following approximation of any scalar field f on each element:
f e (ξ) =
X
Ni (ξ)fie
(2.49)
i
where i is the i-th element node, fie the value of f at node i and
N1 (ξ) =
1−ξ
2
N2 (ξ) =
1+ξ
2
(2.50)
are the 1D linear Lagrange interpolation functions, with the local coordinate ξ ∈ [−1, +1].
The derivative of f e (ξ) with respect to ξ then takes a constant value on each element e:
df e
f e − f1e
= 2
dξ
2
(2.51)
The differential surface operators are computed on each element with the element
local parametrization ξ1 = ξ along Γ and the axisymmetric natural global parametrization
ξ2 = φ for the azimuthal direction. The components of the local metric are thus given by:
a11
a22
a12
dr e
∂xe ∂xe
=
·
=
∂ξ
∂ξ
dξ
e
e
∂x ∂x
·
= (r e )2
=
∂φ ∂φ
= a21 = 0
2
where:
√
j = a11 =
+
q
dz e
dξ
2
=
r2e − r1e
2
2
(r2e − r1e )2 + (z2e − z1e )2
2
+
=
z2e − z1e
2
2
Le
2
(2.52)
(2.53)
is the Jacobian of the transformation from the reference element to the real one, which is
the ratio of the real element’s length Le to the reference element’s length.
The surface gradient of f on an element e is then given by:
∂xe
df e dr e
dz e
= a11
er +
ez
∇s f = a
dξ ∂ξ
dξ dξ
dξ
e
e
z2e − z1e
r2e − r1e
−2 f2 − f1
=j
er +
ez
2
2
2
e
e
f2 − f1e
r2 − r1e
z2e − z1e
=
e
+
e
r
z
Le
Le
Le
e
e
f2 − f1
=
νe
Le
e
11 df
e
where ν e is the unit vector in the direction of the element e (see Fig. 2.2).
30
(2.54)
Free Space Model
The surface divergence of the velocity is:
∂xe ∂ue
∂xe ∂ue
·
+ a22
·
∂ξ
∂ξ
∂φ ∂φ
e e
dr dur
dz e duez
ue
= j −2
+
+ er
dξ dξ
dψ dψ
r
e
e
e
e
r2 − r1e
ur 2 − ur e1
z2 − z1e
uz 2 − uz e1
uer
=
+
+
Le
Le
Le
Le
re
∇s · ue = a11
(2.55)
Note that in the axisymmetric case, the surface divergence of the velocity is not
constant on an element because of the term uer /r e . However this term doesn’t introduce
any singularity since ur = 0 if r = 0. So this term is simply set to zero for pole nodes.
In order to compute the bending forces with the same approach as in 3D, the small
patch to consider for a node n is now the ring formed by the rotation of the two segments
that link the node n to the middle of the neighbouring elements, involving the nodes
(n − 1, n) and (n, n + 1), as shown in Fig. 2.2. Thus the integration contour ∂S is made
of the two circles ∂S − and ∂S + forming the boundary of the patch. If the node is on a
pole (r = 0), then the patch is the cap coming from the rotation of the segment formed
by the node and the middle of the nearest element. Moreover the border is symmetrized
by introducing an additional fictitious element consisting of the node at the pole and the
symmetric (r → −r) of the next node.
Figure 2.2: Integration contour used for axisymmetric computations. The gray zone is
the patch attributed to the node n.
31
Free Space Model
The surface Laplacian of f at node n is then given by:
1
< ∆ s f >n =
S
1
=
S
Z
∂S +
∇s f · νdl +
r n + r n+1
2
2π
!
Z
∂S −
∇s f
∇s f · νdl
e+
·ν
e+
− 2π
r n−1 + r n
2
!
∇s f
e−
·ν
e−
!
where e− is the element joining nodes n − 1 and n, whereas e+ is the one joining nodes
n and n + 1. Using (2.54), this gives:
(r n+1 + r n )(f n+1 − f n ) (r n + r n−1 )(f n − f n−1 )
−
Le +
Le −
π
< ∆ s f >n =
S
with:
S = S+ + S− =
!
(2.56)
π e+ n+1
−
+ 3r n ) + Le (3r n + r n−1 )
L (r
4
As in the 3D case, the approximated value of the divergence of the velocity at node n
is obtained by area weighted average:
< ∇s · u >n =
1 e+
−
−
+
A (∇s · u)e + Ae (∇s · u)e
A
(2.57)
with:
+
+
A = Ae + Ae = πLe (r n+1 + r n ) + πLe (r n + r n−1 )
−
(2.58)
−
A simpler length weighted average can also be used without noticeable difference on the
results, thus with:
−
+
−
+
(2.59)
A = Ae + Ae = Le + Le
Using (2.55), it gives:
< ∇s · u >n =
+
+
Ae
+
(r n+1 − r n )(ur n+1 − ur n ) + (z n+1 − z n )(uz n+1 − uz n )
A(Le+ )2
−
(r n − r n−1 )(ur n − ur n−1 ) + (z n − z n−1 )(uz n − uz n−1 )
A(Le− )2
Ae
ur
r
(2.60)
n
The same area or length weighted average is used for the surface gradient of tension
γ, followed by a projection on the surface tangent plane as in 3D.
Finally, the Gaussian curvature K is computed very easily from the radial component
of the normal vector since in axisymmetric configuration they are related by:
K=−
32
nr
r
(2.61)
Free Space Model
6.5
3D
AXI
6
z
5.5
5
4.5
4
3.5
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
x
Figure 2.3: Comparison of final shapes obtained by the 3D code and the axisymmetric
one for a settling vesicle with ∆ = 0.6 and B0 = 47. The 3D simulation is performed using
M = 1280 triangular elements, while the axisymmetric profile is composed by m = 260
linear elements.
2.4.3
Validation and abilities of free space axisymmetric model
First we validate the axisymmetric formulation in the simple case of the sedimentation
of a vesicle in free space, comparing axisymmetric results to 3D shapes already obtained
for settling vesicles (Boedec et al., 2011b). The vesicle settles under the action of gravity
in a surrounding fluid at rest, u∞ = 0.
In the case of buoyant vesicles a new dimensionless parameter is introduced to compare
gravitational energy to bending energy, the Bond number
B0 =
∆ρgR04
κ
(2.62)
where ∆ρ is the difference of density between inner and outer fluids, g the gravity, R0 the
typical size of the vesicle and κ the bending modulus.
This validation is illustrated in Fig. 2.3 for (∆ = 0.6, B0 = 47), using m = 260 linear elements, uniformly distributed on a meridian, for the axisymmetric simulation. The
comparison is made to the 3D model with M = 1280 triangular elements uniformly distributed on the whole surface of the vesicle. That corresponds to a mesh accuracy about
5 times lower for a meridian plane compared to the axisymmetric simulation. Computations are performed on an Intel Core i7 x980 and the ratio of computational cost between
33
Free Space Model
7
6.5
AXI - m=16
AXI - m=32
AXI - m=64
AXI - m=130
6.6
6.5
5.5
6.4
z
z
6
AXI - m=16
AXI - m=32
AXI - m=64
AXI - m=130
5
6.3
4.5
6.2
6.1
-0.4
4
-0.3
-0.2
-0.1
0
x
0.1
0.2
0.3
0.4
3.5
-1 -0.8-0.6-0.4-0.2 0 0.2 0.4 0.6 0.8 1
x
Figure 2.4: Comparison of final shapes obtained using the axisymmetric code for different
mesh refinements. A good description of the final vesicle shape can be obtained even with
a relative small number of mesh elements.
the axisymmetric computation and the three-dimensional one is 0.1. It demonstrates as
expected that the axisymmetric code offers the possibility to refine the mesh (by a factor
of about 5 here) with a much smaller computation time.
Fig. 2.4 illustrates numerical convergence as a function of the number of elements
in the mesh. We notice that a good description of the final vesicle shape is obtained
even with a relative small number of mesh elements. Furthermore the solution quickly
converges with mesh refinement. For what concerns computational time we notice that,
using as a reference the axisymmetric mesh composed by m = 260 elements, the ratio of
computational cost for less refined meshes is 0.2 for m = 130, 0.06 for m = 64 and 0.02
for m = 32. Comparing the m = 64 axisymmetric case with the previous 3D mesh, both
giving almost the same precision of a meridian discretization, we thus obtain a speed up
of about 500 times on the computational time.
A second test concerns the motion of a vesicle in an unbounded Poiseuille flow, thus
with an imposed background flow given by:
u∞ ez = uP 1 − (r/Rp )2 ez
(2.63)
The background flow speed is thus adjusted with the parameter uP that corresponds
to the maximal velocity at center line (r = 0). Actually, since Rp can be fixed arbitrarily
for an unbounded flow, the most relevant parameter is the curvature of the velocity profile
C = 2uP /Rp2
34
(2.64)
Free Space Model
1.5
3D
AXI
1
1.2
3D
AXI
1
0.8
0.5
z
0.6
0.4
z
0
0.2
0
-0.2
-0.5
-0.4
-0.6
-1
-1
-0.8 -0.6 -0.4 -0.2
0
0.2
0.4
0.6
0.8
1
-0.8
-1.5
-1
x
-0.5
0
x
0.5
1
1.5
Figure 2.5: Comparison of final shape obtained by the 3D code and the axisymmetric one
for a vesicle with ∆ = 0.3 (left) and ∆ = 0.6 (right) immersed in an unbounded Poiseuille
flow with Caunb = 0.5. The 3D simulation is performed using M = 1280 triangular
elements, while the axisymmetric profile is composed by m = 130 linear elements.
This configuration is often used to tackle the motion of a vesicle in a capillary to
mimic a capillary wall at r = Rp . Indeed, from Eq. 2.63 we note that the background
flow velocity is required to vanish for r = Rp . However, this is valid only when the
confinement effect is negligible, as it will be shown in section 4.5.
For this example, no density contrast is considered (∆ρ = Bo = 0) and, in order to
characterize the strength of the flow stress exerted on the vesicle, one usually introduces
the bending capillary number
Ca = η uP R02 /κ
(2.65)
which replaces the usual capillary number Ca = ηuP /γ for drops, where γ is then the
interfacial tension Lac & Sherwood (2009).
However, for the unbounded Poiseuille flow, it is the capillary number based on the
curvature of the background flow profile that is relevant Coupier et al. (2012)
Caunb =
CηR0 4
κ
(2.66)
Fig. 2.5 shows a good agreement between stationary shapes obtained by the 3D code
and the axisymmetric one in the presence of an externally imposed unbounded Poiseuille
flow.
In the Stokes regime the velocity perturbation induced by the presence of a particle
in a fluid flow decays in r −1 . Fig. 2.6 illustrates the velocity perturbation due to the
presence of a vesicle in the case of sedimentation and non bounded Poiseuille flow. The
decay profile is not fully upwind and downwind symmetric because of the flow adapted
non symmetric shape that can be taken by the vesicle, contrary to a solid particle. This
35
Free Space Model
ε
100
sphere sedimentation
vesicle sedimentation
Poiseuille
10-1
10-2
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1
0
1
2
3
4
5
6
7
8
9
10
z
Figure 2.6: Top: Left: Velocity field in free space due to the presence of a settling vesicle
with ∆ = 0.91 and B0 = 48. Right: Velocity field in free space due to the presence
of a vesicle with ∆ = 1.11 immersed in an unbounded Poiseuille flow with Caunb = 2.
Bottom: Magnitude of the mean perturbation velocity as a function of axial distance from
the particle for a settling sphere (red) and the two vesicles shown above in sedimentation
(green) and immersed in an unbounded Poiseuille flow (blue). The black line represents
the decay r −1 .
is more clear in Fig. 2.6 (bottom) which illustrates the magnitude of the mean velocity
perturbation
Z
1 R̄ |u − u∞ |
dr
(2.67)
ǫ(z) = lim
u∞
R̄→∞ R̄ 0
as a function of axial distance from the particle. For the numerical computation, we
take R̄ = 10, but for R̄ large enough the result is not influenced by this parameter. As a
36
Free Space Model
benchmark test for the axisymmetric numerical extension, we observe that the decay of the
magnitude of the mean velocity perturbation is compatible with the attended behaviour
as r −1 , both for the sedimentation and for the unbounded Poiseuille flow.
The axisymmetric formulation presented here has been already used in Boedec et al.
(2013) to study the tether formation (Fig. 2.7). In this paper the formation of a membrane
tube on an initially prolate settling vesicle is investigated, with the rapid development of
a filament at the rear of the vesicle. After a first growth, the elongation of the tether
reaches a constant value, leading to the stationarity of the system. The stability of the
tether is verified over long times.
Figure 2.7: Tether and pearls formation in vesicle sedimentation. Selected dimensionless
times are t = 0.39 ; 5.03 ; 12.80 ; 17.45 ; 19.60 ; 22.67 (×10−4 ).
In addition to the formation of a marked neck between the quasi-spherical deformable
particle and its tail, another common phenomenon observed on drops or vesicles is the
appearance of pearls along the tail (Huang et al., 2011). Some vesicles, which are characterized by high sedimentation velocities, exhibit several tens of microns long pearling
tubes of sub-micron radius. Preliminary results indicate that pearls formation is only a
transient phenomenon, disappearing when the system reaches the stationary state. Our
axisymmetric code is able to predict also this kind of transient dynamics, as shown in
Fig. 2.7. Numerical results are in good agreement with theoretical linear stability analysis
(Boedec et al., 2014).
2.5
Extension for modelling vesicles with viscosity contrast
The dynamical behaviour of vesicles in shear flow has been largely studied experimentally
(Kantsler & Steinberg, 2005, 2006; Deschamps et al., 2009), theoretically (Cantat & Misbah,
1999; Rioual et al., 2004; Farutin et al., 2012), and numerically (Kraus et al., 1996; Biben & Misbah,
2003; Noguchi & Gompper, 2005a; Misbah, 2006; Kaoui et al., 2009b; Zhao & Shaqfeh,
2011). Three main types of dynamics have been found in these studies: a steady state
with a tank-treading motion of the membrane and a finite inclination angle with the
37
Free Space Model
flow direction, an unsteady state with a tumbling (flipping) motion and a trembling
regime where the inclination angle oscillates around 0 but its amplitude never reaches
π/2 Kaoui et al. (2009b). A transition from tank treading to tumbling with an increasing viscosity of the internal fluid has been predicted for fluid vesicles. Moreover, typical
biological cells are characterized by an higher viscosity in the interior than outside the
membrane. This feature can considerably affect the dynamics of the particle and thus
lead to important changes in the interactions with surrounding structures. For this reasons it could be interesting to develop a numerical model taking into account a viscosity
contrast between the inner and the ambient fluid in the case of a free suspended vesicle.
It will be helpful to keep in mind that when λ = 0 or λ = ∞ the particle becomes a
frictionless bubble or a rigid body respectively. Therefore, we will be also able to mimic
the behaviour of a solid particle by greatly increasing the value of λ. This gives us the
possibility to test our developments for the most common case of rigid bodies and this is
the main use we will have in the present work.
As we have already seen in section 2.1, in the presence of an active membrane separating two different fluids 1 and 2 of different viscosity, the j th Cartesian component of the
velocity u at a point x0 lying on the membrane can be expressed as a Fredholm integral
equation of the second kind.
The first integral on the right-hand side of Eq. 2.3 is the single-layer hydrodynamic
potential, and the second integral is the double-layer hydrodynamic potential of Stokes
flow. In this case, in the computation of the velocity field, an extra term coming from
the stress tensor contribution appears. This extra term depends itself from velocity field
so a supplemental matrix inversion is necessary, in order to compute the velocity field.
We note that the kernel function Tijk given in Eq. 2.2 contains a singularity of order
1
r 2 as the field point x0 approaches the source point x, and hence, the equation 2.3 is
hyper-singular.
32
2e-03
simulation
teory
limit
31
30
error
2e-03
2e-03
28
relative error
vertical velocity
29
27
26
25
2e-03
2e-03
1e-03
1e-03
24
1e-03
23
8e-04
22
21
6e-04
0.1
1
10
λ
100
1000
0.1
1
10
100
1000
λ
Figure 2.8: Vertical velocity as a function of the viscosity contrast λ and relative error
respect to the analytical solution (Eq. 2.70) for a viscous spherical liquid drop. The threedimensional mesh is composed by N = 642 nodes and M = 1280 triangular elements.
38
Free Space Model
22.05
1e-02
simulation
teory
error
9e-03
22.00
8e-03
7e-03
relative error
vertical velocity
21.95
21.90
21.85
6e-03
5e-03
4e-03
3e-03
21.80
2e-03
21.75
21.70
100
1e-03
10000
1e+06
1e+08
1e+10
1e+12
1e+14
1e+16
0e+00
100
10000
1e+06
λ
1e+08
1e+10
1e+12
1e+14
1e+16
λ
Figure 2.9: Vertical velocity and relative error for large values of the viscosity contrast λ.
In order to solve this problem and correctly compute the double-layer potential, the
second integral of 2.3 should be written in a different form. A possible solution for the
double layer potential de-singularization is to write (Pozrikidis, 2002):
Z
PV
∂Ω
ui (x)Tijk (x, x0 )nk (x)dS(x)
=
Z
∂Ω
(2.68)
[ui (x) − ui (x0 )] Tijk (x, x0 )nk (x)dS(x) + 4πuj (x0 )
using the following relation:
1
8π
Z
∂Ω
Tijk (x, x0 )nk (x)dS(x) =
δij
1
δ
2 ij
0
if x0 is into ∂Ω
if x0 is on ∂Ω
if x0 is out of ∂Ω
(2.69)
where the unit normal vector n points toward the interior of the control volume surrounded
by ∂Ω (see Appendix A).
In order to test the new function we study the motion of a single spherical drop in
free space for increasing values of the viscosity contrast λ between the inner and the outer
fluid. We compare the obtained vertical velocity along the z-axis with the well known
Hadamard solution (Pozrikidis, 1992b):
uvert =
1 R2 g ∆ρ 1 + λ
2 1+λ
B0
=
3
3 η2 ρ2 1 + 2 λ
3 2 + 3λ
(2.70)
For λ = 1 this is the trivial case of a spherical drop moving with a vertical velocity
4
B0 , while in the limit of λ → ∞ we find the classical situation of a solid sphere
uvert = 15
falling in a fluid, whose velocity is uvert = 92 B0 . In Fig. 2.8 is shown the vertical velocity
and the error respect to the analytical solution. Increasing λ the error on the vertical
39
Free Space Model
10
-1
10
-2
error
error for λ=1010
10-3
10
-4
10
100
1000
10000
mesh size
Figure 2.10: Error on vertical velocity as a function of the mesh elements number for
λ = 1010 .
velocity increases, but at higher values of λ a saturation of the error to a constant value
of the order of 0.2% is observed. In order to test the stability and the robustness of the
new algorithm, we reach high values of λ, simulating the behaviour of a falling sphere in
a fluid. We obtain the same magnitude of the error up to large values of λ ∼ 1015 (Fig.
2.9). An average values of λ is chosen to study the convergence of the solution increasing
the number of mesh elements. Fig. 2.10 shows the decrease of the error at the increase of
the number of mesh elements. We observe a linear convergence in a double log scale, in
agreement with the use of linear interpolation functions (Eq. 2.7). Let discuss now the
numerical cost of the extension for taking into account the viscosity contrast, and thus
computing the double-layer potential using the above-mentioned de-singularization. If we
adopt a 3D mesh with 642 triangular elements, performing computations on an Intel Core
i7 x980, the ratio of computational cost between the case λ = 1 and the present one is
about 0.5.
An equivalent treatment is made for the axisymmetric version of the model. As already
done for the Green’s function in section 2.4.1, we can find the axisymmetric stress tensor
Zαβγ as the azimuthal angle integration of the 3D stress tensor Tijk . The complete
expression of Zαβγ can be found in Pozrikidis (1992b). Let us point out here that for
different fluid viscosity in the interior and at the exterior of the vesicle, the presence of
the stress tensor term introduces a new singularity. Differently from the three-dimensional
case, now we have to deal with a simple divergence Z ∼ 1r .
The double layer potential de-singularization writes (Pozrikidis, 2002) :
Z
PV
ΓZ
=
+
ZΓ
Γ
40
Zαβγ (x, x0 )uβ (x)nγ (x)dl(x)
Zαzγ (x, x0 ) [uz (x) − uz (x0 )] nγ (x)dl(x) − 4πδαz uz (x0 )
[Zαrγ (x, x0 )ur (x) − Pαγ (x, x0 )ur (x0 )] nγ (x)dl(x) − 4πδαr ur (x0 )
(2.71)
Free Space Model
where Pαγ is a new tensor such that
1
8π
Z
Γ
Pαγ (x, x0 )nγ (x)dl(x) =
−δαr
−1δ
2 αr
0
0.08
(2.72)
-0.86
data
theory
0.06
if x0 is into Γ
if x0 is on Γ
if x0 is out of Γ
data
theory
-0.88
0.04
-0.9
velocity
velocity
0.02
0
-0.92
-0.94
-0.02
-0.96
-0.04
-0.98
-0.06
-0.08
-1
-2
-1.5
-1
-0.5
0
angle
0.5
1
1.5
2
-2
-1.5
-1
-0.5
0
angle
0.5
1
1.5
2
Figure 2.11: Radial and vertical local velocity for a spherical viscous liquid drop with
λ = 3. Solid line is the Hadamard-Rybczynski analytical solution.
32
5e-05
data
theory
limit
31
data
5e-05
29
4e-05
28
4e-05
relative error
vertical velocity
30
27
26
25
24
4e-05
4e-05
4e-05
23
3e-05
22
21
3e-05
0.1
1
10
λ
100
1000
0.1
1
10
100
1000
λ
Figure 2.12: Vertical velocity as a function of the viscosity contrast λ and relative error
respect to the analytical solution.
To test the new formulation of the axisymmetric stress tensor we consider the gravitational settling of a viscous spherical drop of given viscosity η2 immersed in a fluid of
viscosity η1 . We assume that the drop move along the z-axis so the flow is axisymmetric
41
Free Space Model
at all the times. For a finite value of viscosity contrast λ between the inner and the
outer fluid there is a recirculation flow inside the drop. We compute the radial and vertical velocity of this flow in each point of the mesh for a fixed value of viscosity contrast
λ = 3. We finally compare the data with the Hadamard-Rybczynski analytical solution
(Pozrikidis, 1992b), obtaining the results in Fig. 2.11.
1e-03
data for λ=10
error
1e-04
1e-05
1e-06
10
100
mesh size
1000
Figure 2.13: Error on vertical velocity as a function of the mesh element number.
Then we repeat the test (described in the previous section) on the motion of a viscous
spherical drop with an increasing viscosity contrast λ. We compute the vertical velocity
of the drop for several values of λ, comparing the data with the Hadamard solution (Eq.
2.70). Results for a mesh with n = 100 nodes are shown in Fig. 2.12. The order of
magnitude of the error is 10−5 . The error decreases for increasing values of λ but the
order of magnitude does not change.
Finally Fig. 2.13 shows the decrease of the error at the increase of the number of mesh
elements for the axisymmetric algorithm. Also in this case we obtain a linear convergence
in a double log scale, in agreement with the use of linear interpolation functions.
Considering the computational cost of the axisymmetric extension to take into account
a viscosity contrast λ 6= 1, we find that it is about 3 times slower than the basic model
for λ = 1, independently of the mesh size. As we have already done in section 2.4.3,
we compare an axisymmetric mesh of 260 linear elements, uniformly distributed on a
meridian, with a 3D model with 1280 triangular elements uniformly distributed on the
whole surface of the vesicle, corresponding to a mesh accuracy about 5 times lower for
a meridian plane respect to the axisymmetric description. The ratio of computational
cost between the axisymmetric computation and the three-dimensional one is 0.1 on an
Intel Core i7 x980. It demonstrates also in this case that the axisymmetric code offers
the possibility to refine the mesh with a much smaller computation time.
For what concerns the real dynamics of the vesicle in the case of different viscosity
between the interior of the vesicle and the external fluid, we assume that the axisymmetric
equilibrium shape should be the same as in the case of λ = 1. Indeed the viscosity
contrast only affects the transient phases of the vesicle motion, but a viscosity contrast
42
Free Space Model
2.96
1.4
λ=1
λ=2
λ=3
λ=5
2.94
2.92
1.35
2.9
2.88
1.3
h
Ebend
2.86
2.84
1.25
2.82
2.8
1.2
2.78
λ=1
λ=2
λ=3
λ=5
2.76
2.74
1.15
0
0.5
1
t
1.5
2
0
0.5
1
1.5
2
t
2.5
3
3.5
4
Figure 2.14: Height (left) and bending energy (right) of an initially prolate settling vesicle
with ∆ = 0.6 and B0 = 47 with increasing viscosity contrast between the inner and the
outer fluid. The viscosity contrast, even if it strongly modifies the dynamics, plays no
role on the final shape.
will of course affect the time, the vesicle takes to reach the steady state. Fig 2.14 shows
the evolution in time of the height and the bending energy of the same initially prolate
settling vesicle already showed in Fig. 2.3. Increasing the viscosity contrast the dynamics
clearly slows down, but the final shape is the same for any value of λ. The same behaviour
is obtained for a large range of λ and for more deflated vesicles, both in sedimentation
and in Poiseuille flow.
43
Free Space Model
2.6
Summary
Numerical simulation of vesicle dynamics into Stokes flow is a challenging problem. We
have proposed in this chapter a description of the hydrodynamical fields using a boundary
element method (Eq. 2.1). First we have presented the principles of the 3D model for
vesicles in free space flows without viscosity contrast (λ = 1) :
uj (x0 ) = u∞ j −
1
8πη1
Z
∂Ω
∆fi (x)Gij (x, x0 )dS
with a special attention to the numerical code optimisation.
The method of computation of bending forces is based onto discrete differential geometry, and is applied to the computation of this force density onto a linearly triangulated
surface. A Lagrange multiplier approach is used to ensures the surface divergence free
constraint. It is shown that this multiplier can be eliminated by the construction of a
projection operator P onto surface divergence free flow fields (Eq. 2.12) :
.
.
.n
u
i
..
.
..
.
= P (u∞ )n
i
..
.
.
.
.n
b
+ GF x
i
..
.
This numerical method is fully implemented in a three dimensional code (section 2.2)
as well as in an axisymmetric code (section 2.4). In particular the explicit expression of
the axisymmetric Green’s function is obtained integrating the three-dimensional Stokeslet
given in Eq. 2.2 in the azimuthal angle φ. Numerical methods are then validated (section
2.4.3) on several test cases, in particular for settling vesicles and vesicles immersed in
Poiseuille flow. The three-dimensional results shows a very good agreement with the axisymmetric ones (Fig. 2.3 and 2.5). The axisymmetric code let us speed up the simulation
in the case of axisymmetric shapes of vesicles.
In section 2.5 we have first implemented and then validated the construction of the
new stress tensor both in the three-dimensional and the axisymmetric model, in order to
model the behaviour of a vesicle with λ 6= 1 in free space. We can thus study new kind
of vesicle motions that are supposed to appear for high values of λ, especially in the case
of an out-of-plane initial shape.
44
Chapter 3
Vesicles in a semi-confined
geometry: preliminary results
3.1
Introduction
Practical experiments on settling vesicles are performed on chambers having obviously a
largely bigger size than the vesicle one. The approximation of infinite fluid flow that we
have studied in the previous section is valid if the size of the vesicle is infinitely small
compared to the distance from the boundaries confining the fluid. If we decrease the
size of the the domain, vesicles deformations will be affected by the presence of the solid
boundary. A simple paradigm of this situation is the gravity driven sedimentation of a
vesicle in a common measurement chamber. Once the equilibrium shape reached, if the
vesicle is far from the bottom of the measurement chamber the shape will not evolute and
depends on the set of control parameters governing the sedimentation, already mentioned
in the previous chapter. As the distance between the settling vesicle and the bottom of the
chamber decreases, the vesicle begins to feel the effect of the planar confinement and starts
to deform. This dynamic is typical, for example, of cell adhesion on biological tissues. As
a model system for describing the mechanisms of cell adhesion, it is convenient to study
the adhesion of a phospholipid vesicle, the simplest model of biological cells, onto a rigid
substrate. In this simple case the the main component of the membrane enclosing cell
cytoplasm is the lipid bilayer. The interactions between a vesicle and a solid surface have
not been investigated so extensively. Vesicles also can be used as encapsulation vectors
for drug delivery (Guedeau-Boudeville et al., 1995), and it has been shown that their
efficiency for drug delivery can be affected by the adhesion process (Bernard et al., 2000).
Cell adhesion has a considerable importance also in designing biomaterials (e.g. artificial
organs, replacement blood vessels, etc.). Thus, the understanding of vesicle adhesion on
flat substrates might provide a deeper knowledge on the key features of the adhesion of
generic cells on different surfaces.
The buoyancy-driven motion of drops has been widely studied in the fluid mechanics
literature both experimentally (Hartland, 1967, 1970; Galvin et al., 1996) and numerically
(Ascoli et al., 1989). In this last paper authors, using a Boundary Integral Method, has
developed a special Green’s function taking into account the confinement action of the
45
Vesicles in a semi-confined geometry: preliminary results
planar wall, and thus the non slip condition on the boundary. Later, the creeping flow
around several spherical particles moving on a line perpendicular to a plane wall has been
calculated numerically by Elasmi et al. (2003) using an axisymmetric version of BEM.
A simple model for the adhesion of vesicles to interfaces and membranes is introduced
and theoretically studied in Seifert & Lipowsky (1990). Adhering vesicles can exhibit a
large variety of different shapes, depending on the control parameters. In Seifert (1991)
the adhesion of vesicles in two dimensions is studied by solving the shape equations
that determine the state of lowest energy. In Rädler et al. (1995) authors experimentally
study, using reflection interference contrast microscopy, the thermal fluctuations of giant
vesicles weakly adhering to flat solid substrates, measuring important informations like
the membrane-substrate separation distance and the contact area. They find that the
effective membrane tension is the key variable controlling the steric interaction and the
equilibrium shape. Gravity can have a significant effect on vesicle shapes. Its effect
arises from the frequently employed experimental technique to stabilize the vesicle at the
bottom of the measurement chamber by a difference in density between the inner and the
outer fluids. Mostly, this is done by solution of different sugars with equal osmolarity,
but different specific weights. Whereas the curvature energy is scale invariant, adhesion
energies behave as R02 . However, the gravitational energy scales as R04 , because it is
proportional to the volume multiplied by the height of the centre of mass of the vesicle
above the substrate. The Bond number introduced in the previous section measures this
effect. The behaviour for very small and very large gravitational energies was already
theoretically studied and understood by simple arguments (Kraus et al., 1995).
Many experiments with lipid vesicles are performed in glucose/sucrose solutions on
glass substrates, using fluorescent dyes to label the membrane. These studies usually
ignore the influence of electrostatic interactions between different components in their experimental setups. Recently, a numerical study based on the boundary-integral method
has been carried out to model the three dimensional gravity-driven sedimentation of
charged vesicles towards a flat surface (Rey Suárez et al., 2013). The sedimentation rate
as a function of the distance of the vesicle to the surface was determined both experimentally and from the computer simulations. It was shown that the consideration of
the electrostatic contribution to surface interactions is essential to accurately predict the
sedimentation rate and the fluid gap between the vesicle and the surface at equilibrium.
The initial stages of spreading of a suspended cell onto a substrate under the effect of
adhesion exhibit a universal behaviour, which is cell-type independent. This behaviour is
governed only by cell-scale phenomena Duperray & Étienne (2011).
In this chapter we are concerned with the interaction of fluid membranes with solid
substrates. We first dedicate this chapter to the study of Green’s functions in domains
of flow that are bounded by a solid surface. The formulation described in the previous
chapter can also be used for the case of a particle moving near a planar wall. In this
case surface stress forces should be determined at the wall as well as at on the particle
surface. In general, in order to keep the computational cost low enough, this would
necessitate truncation of the planar wall to a finite range, with subsequent distribution
of elements on this finite region. In the present work we consider a different approach,
with the fundamental solution selected to eliminate the necessity to determine surface
46
Vesicles in a semi-confined geometry: preliminary results
Figure 3.1: Vesicle deposited on a glass substrate (Image, M. Leonetti). The shape
depends on both the properties of adhesion with the support and the specific properties
of the interface.
forces on the planar wall. By using the wall Green’s function we totally eliminate also
the necessity to numerically truncate and discretize the planar wall. This expedient has
relevant consequences in terms of numerical accuracy and speed. This implementation
represents also a first step toward the study of completely confined vesicles, such as vesicles
in cylindrical channels, whose results will be presented in the next chapter.
In the next section we give a formulation to model three dimensional and axisymmetric
vesicles in a semi-confined domain. As already stated previously, this situation involves
more than one characteristic length scale. Indeed, experimental results on adhesion to
a substrate show that the thickness of the lubrication film between the vesicle and the
wall is of the order of 1/200 with respect to the vesicle typical size (Chatkaew et al.,
2009). Since the 3D description can become very challenging, because it is necessary to
greatly increase the number of nodes in order to properly describe the lubrication film,
it is convenient to treat these problems with an axisymmetric model for all axisymmetric
regimes.
In order to really mimic the gravity-driven sedimentation of vesicles towards a flat surface, we then introduce a short range repulsive potential to take into account electrostatic
interactions between the vesicle membrane and the surface. Indeed, these electrostatic
interactions can affect important features in vesicle sedimentation, such as the sedimentation rate close to the wall or the gap between the vesicle and the surface at equilibrium.
In section 3.5, we first validate the 3D and axisymmetric model numerically comparing
the velocity field due to a point of force in a semi-confined geometry and the equilibrium
shape of vesicle adhering on a flat surface. We then focus on the gravity induced sedimentation and deformation of settling vesicles as they approach a flat horizontal no-slip
surface. The complete time evolution of a vesicle shape from ellipsoidal far from the wall
to highly deformed near the wall is studied, with no limitation on film thickness. In particular we analyse the differences between the sedimentation toward a wall and the case
of a simple virtual confinement, due to the repulsive potential. In this last case, since no
47
Vesicles in a semi-confined geometry: preliminary results
real wall is taken into account, we can neglect lubrication effects and focus our attention
on the dynamics of the system. Finally, in section 3.6, a more general formulation taking
into account the viscosity contrast between the outer and the inner fluid is presented,
both for the three-dimensional and the axisymmetric case.
3.2
Extension of the 3D Green’s function
In order to investigate the three dimensional gravity-driven sedimentation of charged
vesicles towards a flat surface perpendicular to the axis of gravity and the subsequent
adhesion process between the vesicle and the wall we extend here our model taking into
account the new geometry of the problem (Fig. 3.2). For this purpose we change the kernel
of the Green’s function in Eq. 2.2. The domain of integration in the boundary integral
equation may be conveniently reduced by using a Green’s function that vanishes over
selected boundaries of the flow. As a general rule, a Green’s function may be computed
most effectively after it has been decomposed into the free-space Green’s function (the
Stokeslet), already shown in Eq. 2.2), a collection of image singularities with poles outside
the domain of flow, and a regular complementary component that is required to satisfy
proper boundary conditions on the solid surface (Pozrikidis, 2002, 1992a). Each element
of the kernel is now composed by four contributions: the Stokeslet, the Stokeslet’s image,
the doublet term and the dipole term.
Figure 3.2: Cartoon of the semi-confined geometry. The wall is perpendicular to the axis
of gravity and is place in z = zw .
Im
2
Im
Gij (x, x0 ) = GFijS (x, x0 ) + GFijS (x, xIm
0 ) + 2h0 Dij (x, x0 ) − 2h0 Qij (x, x0 )
48
(3.1)
Vesicles in a semi-confined geometry: preliminary results
where GFijS (x, x0 ) is the free-space Green’s function defined in Eq. 2.2 , xIm
0 = (x0 , y0 , 2zw −
z0 ) is the image of the point force with respect to the wall, h0 = (z0 − zw ) is the distance
of the point force from the wall, Dij and Qij represent, respectively, the dipoles and the
doublets term
x̂i xˆj
δij
−3 5
r3
r
δj3 xi − δi3 xj
Qij (x, x0 ) = x3 Dij ±
r3
Dij (x, x0 ) = ±
(3.2)
where the vector x̂ = x − x0 , r = kx̂k, δij is the Kronecker’s delta, and the plus sign
applies for j = 1, 2, corresponding to the x and y directions, and the minus sign for j = 3,
corresponding to the z direction.
This new Green’s function respects the required no-slip condition on the planar wall:
u(x) = 0 for
x ∈ R3 : x = (x, y, z)
and
z = zw
(3.3)
At the numerical level this extension of the Green’s function does not introduce new
singularities. The extra terms in the Green’s function are computed on the image of the
point of force respect to the wall, so they can be easily integrated over the wall surface.
A word of caution is here in order: differentiation with respect to the pole x may not be
equivalent to differentiation with respect to the field point x0 followed by sign inversion,
for the flow due to the singularities may depend not only on the difference x − x0 but
also explicitly on x.
3.3
Extension of the axisymmetric Green’s function
In order to better investigate the shape of the vesicle during the adhesion process, we
develop here an axisymmetric code in the presence of an infinite, no-slip, planar wall.
All motions and deformations are assumed axisymmetric about the z-axis, which passes
through the vesicle centre and is normal to the planar wall. Gravity is assumed to act
along the z-axis, toward the wall. The axisymmetric BEM formulation is the same as
the free space model described in Sec. 2.4.1, but, as for the three-dimensional case, the
Green’s function should now take into account the new geometry of the domain. We use
Ascoli (1988); Ascoli et al. (1989) as a reference for the construction of the axisymmetric
Green’s function in a semi-confined domain. As in the three-dimensional model, the
new Green’s function is decomposed into the free-space Green’s function (the Stokeslet),
already computed in section 2.4.1, a collection of image singularities with poles outside
the domain of flow, and a complementary component that satisfies non-slip boundary
conditions on the solid surface.
AXI
2 AXI
(x, xIm
(x, xIm
Mij (x, x0 ) = MijF S (x, x0 ) + MijF S (x, xIm
0 )
0 ) − 2h0 Qij
0 ) + 2h0 Dij
(3.4)
where MijF S (x, x0 ) is the free-space axisymmetric Green’s function defined in Eq. 2.44 ,
xIm
0 = (r, 2zw − z) is the image of the point force with respect to the wall, h0 = (z0 − zw )
49
Vesicles in a semi-confined geometry: preliminary results
AXI and QAXI represent, respectively,
is the distance of the point force from the wall, Dij
ij
the dipoles and the doublets term. We address the reader to Ascoli (1988) for details on
the construction of the new Green’s function. Let us recall here that, in order to find
the explicit expression of 3.4, we need to compute complete elliptic integrals of the first
and second kind, using the polynomial approximation (2.48). A numerical difficulty arise
when r and/or r0 → 0, because of the numerical divergence of some terms also in the
complementary components. This problem can be fixed using an analytical approximation
of elliptic integrals and truncating the expansion to O(k4 ).
2.5
3D
AXI
2
z
1.5
1
0.5
0
-0.5
0
0.5
1
r
1.5
2
(a) Velocity field due to a point of force
near the wall. The green arrow indicates (b) Modulus of the velocity for several valthe force
ues of z.
Figure 3.3
To test this axisymmetric extension of the model we first study the velocity field in
a domain bounded by a planar surface generated by a point of force placed near the
wall. We use the 3D computational algorithm to numerically compute a reference for
the velocity field near the plane wall, performing an integration of the velocity field over
the azimuthal angle φ around the axis of symmetry. Then we compare the results of the
integration with those coming from the axisymmetric model, obtaining a good qualitative
and quantitative agreement, as shown in Fig. 3.3.
50
Vesicles in a semi-confined geometry: preliminary results
3.4
Interaction potential
Experiments performed in the absence of salt has proven that the electrostatic interaction
of the vesicle with the planar wall plays an important role in regulating the sedimentation dynamics of the vesicle and the equilibrium state (Rey Suárez et al., 2013). In order
to investigate the shape of the vesicle in the presence of a wall perpendicular to the
axis of gravity and the subsequent adhesion process between the vesicle and the wall,
we must first take into account the effect of an interaction potential, which can mimic
the interaction between the vesicle membrane and the planar wall. The total interaction
potential of a membrane under tension and a solid flat substrate can be approximated
by simple superposition of the van der Waals interaction and the electrostatic interaction
(Rädler et al., 1995). The superposition as opposed to a rigorous renormalization approach is valid if the fluctuations are weak, which for membranes under tension is always
the case (Grotehans & Lipowsky, 1990). The adhesion potential at a distance z from the
wall is chosen to be (Sukumaran & Seifert, 2001)
V (z) = ǫ(r0 /z)2 ((r0 /z)2 − 2)
(3.5)
1
V
0.5
0
-0.5
-1
0
0.02
0.04
0.06
0.08
0.1
z
Figure 3.4: Potential in the vicinity of the plane wall.
where ǫ is the adhesion strength and r0 is the distance where the potential reaches
the minimum. This potential (Fig. 3.4) is mildly attractive in the long range (as −1/z 2 ),
but strongly repulsive when the distance is lower than r0 (as 1/z 4 ), to avoid any contact
between the bottom of the vesicle and the plane wall.
In the next section we will explore the main differences in the dynamics in the presence
of the wall or in the case there is only the DLVO potential ("virtual wall" case). We will
see that, even if the final shapes are the same, the dynamics is strongly affected by the
presence of the solid boundary, which drastically slows down the system especially during
51
Vesicles in a semi-confined geometry: preliminary results
the final adhesion process, when the distance between the bottom of the vesicle and the
wall is extremely thin and the lubrication dominates the dynamics.
3.5
Applications
Figure 3.5: Final shape of a three-dimensional vesicle adhering on a surface. The vesicle
has an excess area of ∆ = 1.11 and B0 = 49. The mesh is composed by N = 642 nodes
and M = 1280 triangular elements.
As validation test case for the 3D numerical model and the axisymmetric extension,
we study the sedimentation of a vesicle towards a plane wall with fixed Bond number and
reduced volume, comparing axisymmetric results to 3D equilibrium shapes. The vesicle
settles under the action of gravity in a surrounding fluid at rest, thus u∞ = 0. Fig. 3.5
shows the final equilibrium shape of the vesicle. The existing remeshing algorithm, largely
used to simulate settling vesicles in free space, is based on the curvature criterion: all the
points of the mesh are moved toward the high curvature parts of the surface. In the
case of an adhering vesicle on a surface, the bottom of the vesicle during the final part of
adhesion process is almost flat, so corresponding triangles are too big to correctly describe
the interaction between the surface and the wall potential. To avoid meshing problems
in the vicinity of the wall, we add a second criterion based on the area of the triangles,
forbidding the elements to be too small or too big by a threshold on the area difference
between all the triangles. In this way the bottom of the vesicle can be well represented and
the allowed difference on the size of different triangles is now controlled by a parameter.
The three-dimensional vesicle mesh presents slightly anisotropic deformations because of
the effect of the remeshing algorithm based on the criterion concerning the area of the
triangles, as previously described. This mesh anisotropy seems to not affect the validity of
final results on vesicle shapes, as shown in Fig. 3.6, where equilibrium shapes of vesicles
in the 3D case and the axisymmetric one are compared. The agreement between the two
model is good, for a large range of control parameters.
From the numerical point of view, the axisymmetric formulation is extremely faster
than the 3D one, so we can use it to perform a systematic study on final shapes of vesicle
spreading toward a plane wall. As previously done in the free-space case, we compare
52
Vesicles in a semi-confined geometry: preliminary results
1.8
3D
AXI
1.6
1.6
1.4
1.2
1
z
1
z
0.8
0.6
0.8
0.6
0.4
0.4
0.2
0
-1.5
3D
AXI
1.4
1.2
0.2
-1
-0.5
0
x
0.5
1
1.5
0
-1.5
-1
-0.5
0
0.5
1
1.5
x
Figure 3.6: Comparison of final shape obtained by the 3D code and the axisymmetric one
for a vesicle adhering on a wall with ∆ = 0.1 (left) and ∆ = 0.42 (right). In both cases
B0 = 9.8. The 3D simulation is performed using M = 1280 triangular elements, while
the axisymmetric profile is composed by m = 130 linear elements.
numerical cost of the algorithm for the 3D model and the axisymmetric extension, using
1280 triangular elements in the first case and 130 linear elements in the second one.
The ratio of computational cost between the axisymmetric computation and the threedimensional one is 0.05, that is two times lower respect to the free space case. As we have
already seen in the previous section, such situations involving more than one characteristic
length scale are very challenging to treat in 3D, because the number of mesh elements
should be greatly increased in order to have a good description of the dynamics of the
system. The axisymmetric description let us increase the mesh refinement respect to the
3D shapes, with a smaller computation time and an high precision, especially on the
description of the thin lubrication film between the vesicle and the plane wall.
On the other hand the three dimensional implementation is essential to describe nonaxisymmetric behaviours, like the rolling of a vesicle on an inclined plane. Experimental
studies (Abkarian et al., 2001) has shown indeed that giant phospholipidic vesicles migrating along an inclined plane in a quiescent fluid mainly slide along the plane, but also
roll, never adhering to the substrate surface. At present there are no numerical studies
supporting these experimental observations. It would be thus interesting in the future
to numerically study the non-axisymmetric rolling motion of a vesicle along an inclined
plane in order to explore whether the framework remains the same when the vesicles are
more deflated or adhere to the substrate. Moreover, the 3D model can be useful since
it was already found that, for relatively large reduced volume and low Bond number,
non-axisymmetric bound shapes are stable (Kraus et al., 1995), showing a continuous
transitions to axisymmetric large-B0 shapes. A detailed study of this transition for vesicles close to a wall is in progress at the moment and results will be presented in future
works.
We now verify the consistence of our model by comparing our results with experimental equilibrium shapes of vesicles adhering on a flat surface. In Rey Suárez et al. (2013)
authors shows images of vesicles adhering on a charged glass surface, obtained through
53
Vesicles in a semi-confined geometry: preliminary results
confocal microscopy and image analysis, by staining the glucose solution with low concentrations of calcein. They provide also a comparison with three-dimensional numerical
shapes obtained using a boundary element method, taking also into account electrostatic
interactions between the vesicle membrane and the wall. Even if in the paper it is not well
specified the set of dimensionless control parameters governing the numerical simulations,
it is interesting to check if our model is able to predict these shapes for not highly deflated
vesicles. Indeed, for a given profile, it is possible to find the corresponding deflation from
the value of the enclosed volume and the surface area. Fig. 3.7 shows the superposition of
equilibrium shapes obtained in Rey Suárez et al. (2013) and our results. The agreement
between vesicles profiles is good.
Figure 3.7: Comparison between experimental confocal images of giant vesicles at equilibrium from Rey Suárez et al. (2013) and our simulations. Experimental vesicles are in
solutions with 3 mM of NaCl and no salt, respectively. Corresponding values for numerical simulations are ∆ = 0.1 (left) and ∆ = 0.03 (right). In both cases the Bond number
is setted to B0 = 1.
However, in order to well characterize also the film thickness between the bottom of
the vesicle and the solid wall, a more accurate choice of the interaction potential should
be done, especially for what concerns the parameter r0 . Indeed the particular behaviour
of the potential, even if it does not strongly affect the equilibrium shape of the vesicle,
has a relevant influence on the sedimentation dynamics and the film thickness. But these
considerations goes behind the scope of the present study.
Once validated both the 3D model and the axisymmetric one, we can focus both on
the dynamics of vesicle profile and on the final shape for different values of characteristic
parameters, especially the reduced volume and the Bond number. First, the sedimentation
dynamics are studied, then the equilibrium state of the vesicle is analysed.
The simulations are initialized with the vesicle at a certain distance from the surface. The sedimentation velocity decreases as the vesicle approaches the flat surface. At
distances much larger than r0 the electrostatic interactions are negligible and the whole
54
Vesicles in a semi-confined geometry: preliminary results
process is dominated by the hydrodynamics. As the vesicle approaches the wall, it decelerates exponentially approaching a zero velocity. Close to the wall the electrostatic
interactions become increasingly important causing a rapid deceleration, as the gravityinduced force is balanced by the electrostatic interactions.
3.5
3.5
t=0
t=0.06
t=0.12
t=0.18
t=0.30
t=1
t=60
t=120
3
t=0
t=0.06
t=0.12
t=0.18
t=1
3
2
2
z
2.5
z
2.5
1.5
1.5
1
1
0.5
0.5
0
-1.5
-1
-0.5
0
r
0.5
1
1.5
0
-1.5
-1
-0.5
0
0.5
1
1.5
r
Figure 3.8: Dynamics of a settling vesicle with ∆ = 0.6 starting from a prolate shape
centred at z = 2 in the presence of the wall at z = 0 (left) and without the solid boundary
(right). The potential 3.5 is the same in both cases.
It’s interesting to compare the behaviour of the settling vesicle in the presence of a flat
wall and in the case of a virtual wall, as mentioned in section 3.4, in order to investigate
the vesicle dynamics and thin film drainage. In both cases the front head of the vesicle is
flattened as the vesicle nearly touches the wall, and a dimpled very thin film is observed.
The presence of the wall slows down the dynamics of the vesicle respect to the case where
there is only the electrostatic potential. Because of the great viscous forces of the flow
inside the thin film, the vesicle slows down dramatically.
The comparison between the two different dynamics of the system is shown in Fig. 3.8.
In the bounded case the dynamics is much slower, especially during the last lubrication
process, from t = 1 to t = 120. In this time range the shape remains almost the same,
except for the slow disappearance of the dimple at the bottom of the vesicle, and the film
thickness between the vesicle and the wall reaches the equilibrium value. As pointed out
previously, in the unbounded case no lubrication effects are present and the equilibrium
shape is reached in a shorter time. As shown in Fig. 3.9 in the unbounded case the vesicle
vertical velocity is higher and, while it slowly converges to zero in the presence of the wall,
it rapidly increases and assumes positive values when the bottom of the vesicle crosses the
potential minimum and is submitted to the repulsive force. Finally it decreases to zero
55
1
60
0
50
-1
40
-2
30
vvert
vvert
Vesicles in a semi-confined geometry: preliminary results
-3
20
-4
10
-5
0
-6
-10
-7
0.0001 0.001 0.01
∆=0.1
∆=0.6
0.1
1
10
100
-20
0.0001
1000
∆=0.1
∆=0.6
0.001
0.01
t
0.1
1
10
1
10
t
2
2
∆=0.1
∆=0.6
1.6
1.6
1.4
1.4
zg
1.8
zg
1.8
∆=0.1
∆=0.6
1.2
1.2
1
1
0.8
0.8
0.6
0.0001 0.001 0.01
0.1
1
t
10
100
1000
0.6
0.0001
0.001
0.01
0.1
t
Figure 3.9: Vertical velocity (top) and centre of gravity height for a settling vesicle starting
from z = 2 in the presence of the wall at z = 0 (left) and without the solid boundary
(right). The potential 3.5 is the same in both cases.
when the equilibrium shape is reached. For what concerns the vesicle centre of gravity
(3.9), it initially follows a similar dynamics in the two cases and it converges to the same
value for the equilibrium shape, but the change is sharper in the absence of the solid wall,
since no lubrication regime is present.
Once the forces acting on the vesicle balance out, the vesicle reaches equilibrium and
the sedimentation rate approaches zero. At this point the vesicle acquires a shape determined by the equilibrium of the electrostatic and gravitational forces with the membrane
resistance to deform. Increasing the excess area the spreading slows down the dynamics
56
Vesicles in a semi-confined geometry: preliminary results
0.002
2
0.0015
∆=0.004
∆=0.03
∆=0.1
∆=0.21
∆=0.491
∆=0.6
∆=0.901
∆=1.1142
∆=1.57
∆=2.0
1.8
1.6
0.0005
∆z
1.4
0.001
z
1.2
1
0
-0.0005
0.8
-0.001
0.6
-0.0015
0.4
-0.002
0.2
0
0.2
0.4
0.6
0.8
1
r
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
r
(a) Comparison between final shape of vesicle characterized by the same Bond number
B0 = 1 but different value of excess area.
(b) Displacement along z of the vesicle profile respect to the position in r = 0, for different values of excess area. Only the bottom of the vesicle is represented. Moreover
∆z is amplified.
Figure 3.10
and the time to reach the equilibrium state increases drastically. Final shapes for several
values of excess area are shown in Fig. 3.10a. Fig. 3.10b shows the displacement along z
of the vesicle profile respect to the position in r = 0, for different values of excess area.
Increasing the value of ∆ (so deflating the vesicle more and more from his spherical shape
at ∆ = 0), the vesicle can deviate from the spherical shape and the deformation becomes
more important. Consequently the height of the final profile of the vesicle decreases, since
the vesicle has the possibility to spread on the surface, and the contact area between the
vesicle and the substrate increases. For high values of excess area (i.e. ∆ = 2 in Fig.
3.10a), we observe an inversion of the curvature on the top of the vesicle, in agreement
with the transition to the collapsed discocyte already predicted in Kraus et al. (1995).
Fig. 3.11 shows the height of the vesicle profiles, defined as the axial distance between
the two mesh edge points placed in r = 0, and the adhesion radius, computed as the set
of points having a smaller curvature than a fixed threshold, for increasing values of the
excess area. It should be noted that changing the threshold value or using a different
criterion, such as including all the mesh points where the adhesion force is repulsive, the
behaviour shown in Fig. 3.11 does not change. For what concerns the film thickness
and the dimple depth at the bottom of the vesicle, they increase with the increase of the
excess area, as shown in Fig. 3.10b.
Let’s focus finally on the influence of the Bond number B0 on the final shape. Indeed,
57
Vesicles in a semi-confined geometry: preliminary results
2
1
B0=1
B0=10
B0=150
0.9
1.8
0.8
0.7
1.6
radh
h
0.6
1.4
0.5
0.4
1.2
0.3
0.2
1
B0=1
B0=10
B0=150
0.1
0.8
0
0
0.5
1
∆
1.5
2
0
0.5
1
∆
1.5
2
Figure 3.11: Height (left) and adhesion radius (right) of adhering vesicle for several values
of the Bond number with respect to the excess area.
1.6
B0=1
B0=10
B0=150
1.4
1.2
1
1.2
0.8
1
0.8
z
z
B0=1
B0=10
B0=150
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0.2
0.4
0.6
r
0.8
1
1.2
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
r
Figure 3.12: Comparison between final shapes of vesicles characterized by the same value
of excess area (∆ = 0.49 on the left and ∆ = 2 on the right) but different value of the
Bond number.
while for what concerns the effect of the vesicle deflation on the equilibrium shape several
investigations have already been performed, there are no many studies on the role played
by the second relevant control parameter, that is B0 . A quantity of interest is the height
58
Vesicles in a semi-confined geometry: preliminary results
of the vesicle as a function of the Bond number for a fixed deflation. A counter-intuitive
results is that the height of the equilibrium shape is higher for higher values of B0 . Indeed,
an increasing density contrast leads the vesicle to adhere on the wall with a bigger surface,
so the adhesion radius increases. As a consequence, since the external surface of the vesicle
should be preserved, the vesicle has an higher height, as shown in Fig. 3.12. This implies
for highly deflated vesicles (Fig. 3.12 right) that increasing the Bond number it is possible
to transit from a negative curvature on the top of the profile to a positive one. Moreover,
the distance to the surface decreases as B0 increases due to the increase in the effective
weight of the membrane as compared to the electrostatic force.
3.6
Extension for a viscosity contrast
From previous studies we already know that the equilibrium shape of the vesicle in the
presence of a wall perpendicular to the axis of gravity does not depend on the viscosity
contrast between the inner and the ambient fluid. However the dynamics of the adhesion
process can be highly affected. Hence it could be interesting to take into account the
contribution of the double layer potential also in this case of semi-confined geometry.
3.6.1
3D formulation - viscosity contrast with a wall
As described in Sec. 3.2 for the Green’s function, in order to take into account the semiinfinite domain the kernel of the free space stress tensor 2.2 should be modified (Pozrikidis,
2002, 1992a). As for the Green’s function, in the presence of a wall each element of the
stress tensor kernel is composed by four contributions: the free space Stresslet, the image,
the doublet and the dipole terms.
Im
2
Im
FS
FS
Tijk (x, x0 ) = Tijk
(x, x0 ) + Tijk
(x, xIm
0 ) + 2h0 Dijk (x, x0 ) − 2h0 Qijk (x, x0 )
(3.6)
xˆ xˆ xˆ
F S (x, x ) = −6 i j k is the free-space stress tensor, xIm = (x , y , 2z − z ) is
where Tijk
0 0
w
0
0
0
r5
the image of the point force with respect to the wall, h0 = (z0 − zw ) is the distance of
the point force from the wall, Dijk and Qijk represent, respectively, the dipoles and the
doublets term.
At the numerical level this operation is quite easy since the new terms in the stress
tensor should be computed on the image of the point of force respect to the wall, so
they never introduce new singularities and they can be easily integrated over the particle
surface.
3.6.2
Axisymmetric formulation - viscosity contrast with a wall
As a special case of three-dimensional flow, we consider now the axisymmetric flow in a
semi-infinite domain. As already done for the Green’s function in section 3.3, we can find
the axisymmetric stress tensor Zαβγ as the azimuthal angle integration of the 3D stress
tensor. In order to implement the axisymmetric extension of the stress tensor in a semiinfinite domain we use as a reference the formulation given in Ascoli (1988); Ascoli et al.
(1989), where the complete expression of Zαβγ can be found.
59
Vesicles in a semi-confined geometry: preliminary results
100
10
n=25
n=50
n=100
n=150
n=200
theory
h=0.05
h=0.1
h=0.25
h=1
h=5
1
0.1
error
K
0.01
10
0.001
0.0001
1e-05
1
0.01
1e-06
0.1
1
10
10
100
n
h
1000
Figure 3.13: Left: correction K for a falling sphere towards a plan wall respect to the
distance h for different meshing sizes. Right: relative error on K for several values of h
respect to the mesh elements number n (the reference value for each curve is the value at
n = 1000). The black line indicate convergence scaling in n−3 .
In order to validate the extension of the axisymmetric formulation in a semi-confined
geometry, the simple case of a falling rigid sphere towards a plane wall is considered.
Since a spherical vesicle with a fixed enclosed volume and local surface incompressibility
constraint behaves as a rigid body, this example corresponds actually to the sedimentation
of a non deflated thus spherical vesicle (∆ = 0).
From the Stokes law, defining a correction factor K due to the presence of the wall,
the drag force exerted on a spherical object of radius R0 in the presence of a plane wall
can then be expressed as:
Drag =
6πη uS R0
|
{z
}
K
(3.7)
Drag in Infinite Medium
where η is the fluid viscosity and uS is the settling velocity. Imposing an arbitrary settling
velocity uS to all nodes of the membrane mesh, we can easily obtain the corresponding
surface force density exerted by the induced flow on the membrane by inversion of the
system. Integrating then on the membrane surface, we obtain the resulting drag force
and thus the correction factor K that can be compared to existing theoretical values.
The correction coefficient K is shown in Fig. 3.13 as a function of the distance of the
sphere from the wall. A good estimation of the coefficient can be obtained even with a
60
Vesicles in a semi-confined geometry: preliminary results
25
velocity
solid sphere
vertical velocity
20
15
10
5
0
0.01
0.1
1
h
10
100
Figure 3.14: Vertical velocity of a vesicle with λ = 1010 as a function of the distance from
the wall compared with the analytical solution for a solid sphere.
small number of mesh elements. Relative error on K estimation versus analytical solution
is also reported in in Fig. 3.13 as a function of the number n of nodes in the particle’s
surface mesh.
As a last test for the stability and the robustness of the new stress tensor we can
mimic the behaviour of a falling rigid spherical particle towards a plane wall as a vesicle
with non-zero Bond number (B0 = 98), very small excess area (∆ ∼ 0) and high viscosity
contrast between the inner and the outer fluid (λ = 1010 ). In this way the particle velocity
will be mostly given by the double-layer contribution. When the particle is far from the
wall, the situation is that of a solid sphere falling in a infinite fluid, whose velocity is
uvert = 29 B0 , as we have already seen in the previous chapter. As the spherical vesicle
approaches the wall the vertical velocity decreases and slowly converges to zero. Fig. 3.14
shows the comparison between the obtained vertical velocity as a function of the particle
distance from the wall and the analytical solution for a solid sphere. The good agreement
with theoretical values guarantees the precision and the robustness of the stress tensor
even for very high values of viscosity contrast.
61
Vesicles in a semi-confined geometry: preliminary results
3.7
Summary
In this chapter we have studied the interaction of the vesicle fluid membrane with solid
substrates. We have first dedicated our attention to the study of the Green’s function
in domains of flow that are bounded by a solid surface both in the three-dimensional
(section 3.2) and the axisymmetric (section 3.3) model. The resulting Green’s function is
composed by the Stokeslet, already shown in Eq. 2.2, a collection of image singularities
with poles outside the domain of flow, and a regular complementary component that
is required to satisfy proper boundary conditions on the solid surface. In 3D the final
expression of the Green’s function reads
Im
2
Im
Gij (x, x0 ) = GFijS (x − x0 ) + GFijS (x − xIm
0 ) + 2h0 Dij (x − x0 ) − 2h0 Qij (x − x0 )
where GFijS (x, x0 ) is the Stokeslet defined in Eq. 2.2, x̂ = x − x0 , r = kx̂k, δij is the
= (x0 , y0 , 2zw − z0 ) is the image of the point force with respect
Kronecker’s delta, xIm
0
to the wall, h0 = (z0 − zw ) is the distance of the point force from the wall, Dij and Qij
represent, respectively, the dipoles and the doublets term.
In order to investigate the shape of the vesicle in the presence of a wall perpendicular
to the axis of gravity and the subsequent adhesion process, we have then considered an
interaction potential of the form
V (z) = ǫ(r0 /z)2 ((r0 /z)2 − 2)
which can mimic the interaction between the vesicle membrane and the planar wall.
In section 3.5 we have first validated the numerical methods by comparing the flow
field generated by a point of force and the final vesicle shape at equilibrium between threedimensional results and axisymmetric ones. Moreover, the comparison of our numerical
results with experimental shapes of vesicle on a solid substrate is quite good. Next we
have focused on the gravity induced sedimentation and deformation of settling vesicles
as they approach a flat horizontal no-slip surface. The complete time evolution of vesicle
shape from ellipsoidal far from the wall to highly deformed near the wall has been studied
and compared to the case where no wall is present and the only restraint for the vesicle
sedimentation is the electrostatic potential.
Finally, in section 3.6 we have implemented and validated the construction of the stress
tensor both in the three-dimensional and the axisymmetric model, in order to model the
behaviour of a vesicle with λ 6= 1 in a bounded domain.
62
Chapter 4
Vesicles in a capillary
4.1
Introduction
The capillary flow is the archetype of most practical situations in natural living systems,
where all kinds of cells are transported in the body vessels, as well as in artificial systems,
where biomimetic soft particles are transported in microfluidic networks.
The understanding of vesicle behaviour in confined capillary flows would lead to a
better knowledge of red blood cells in human capillaries since they both share some
similar mechanical behaviours, especially when capillary size is comparable to cell diameter. The dynamical behaviour of vesicles in flow is an important subject not only of
fundamental research but also in medical applications. For example, the apparent viscosity of blood in microvessels depends on the tube diameter (Fahraeus–Lindqvist effect)
(Fahraeus & Lindqvist, 1931; Pries et al., 1992). In some diseases, RBCs have reduced
deformability, which leads to an increase of the apparent blood viscosity (Tsukada et al.,
2001). Moreover, the mechanical response of cells to the local flow is potentially important
in many biological processes.
Now the fact that the fluid flow domain is limited by boundaries can have two effects
on the transported particles depending on their relative size compared to the vessels size.
For large vessels, a transported particle sees the influence of the boundaries only through
the background velocity profile (typically Poiseuille flow). Direct interaction with a wall
appears only for particles coming very close to it, and in that case the archetype of the
interaction is the semi-confined configuration studied in the previous chapter. For small
vessels, a transported particle feels the direct influence of the walls from all sides. Thus
it feels the wall not only through the action on the velocity profile but also directly by
what we will call confinement effect. And it’s on this last situation that we will focus in
the present chapter.
If the capillary size is reduced, for really deflated vesicles, the lubrication film is not
optically measurable and therefore strictly lower than 1/10 of the vesicle size. However
since in that case the flow configuration often presents axial symmetry, it is possible to
treat more efficiently these kind of problems with an axisymmetric model. This is the
reason why a large part of our efforts have focused on the development of an efficient
axisymmetric model for vesicles in capillary flows.
63
Vesicles in a capillary
To our knowledge most BIM studies devoted to this problem are 2D or/and restricted to unbounded Poiseuille flow (Vlahovska et al., 2009; Kaoui et al., 2008, 2009a;
Danker et al., 2009; Coupier et al., 2008). Experimental studies have shown that the
most commonly stationary vesicle’s shapes are axisymmetric bullet and parachute like
shapes, until these shapes destabilize to 3D shapes like slippers (Vitkova et al., 2004;
Coupier et al., 2012). These shapes have also been found in the few existing 3D simulations (Coupier et al., 2012; Noguchi et al., 2010). However for an exhaustive parametric
study, some approximations to the real flow must be introduced to render the problem
tractable: either stay in 3D and consider the related unbounded Poiseuille flow or drift
to 2D (Kaoui et al., 2011; Farutin & Misbah, 2011). Both have proven to be very useful, but none of these approaches can fully take into account the action of a capillary
confinement on vesicle’s shapes, especially when confinement becomes significant. So, in
other words, an efficient BIM axisymmetric model to study the transport of vesicles in a
capillary would fill a miss in the class of BIM models.
In fact axisymmetric BIM models have not attracted so much attention at all. The
reason is that their development is more involved than for a 2D formulation and of limited
applicability compared to a full 3D model. Considering only the case of soft deformable
particles, BIM axisymmetric models have been developed first to study axisymmetric configurations of drops (Pozrikidis, 1992b). The axisymmetric Green’s function for free-space
flows has been also used to develop an axisymmetric formulation for capsules in elongational flows in Li et al. (1988) and used by the same group to study extensively the deformation of capsules flowing through pores (Quéguiner & Barthès-Biesel, 1997; A. Diaz,
2002; Y. Lefebvre, 2007). Its however only recently that axisymmetric models have been
proposed for vesicles in free space flows (Veerapaneni et al., 2009; Zhao & Shaqfeh, 2013).
An axisymmetric Green’s function taking into account the no-slip condition at the wall
have been proposed in Ascoli et al. (1989) for the case of a flat wall perpendicular to the
flow, and in Pozrikidis (1992a) for a circular pipe. Only the periodic version of this last
has been used in practice to study the motion of a train of drops or red blood cells in
a capillary (Pozrikidis, 1992a, 2005a). To our knowledge no BIM-model for an isolated
vesicle in an infinite capillary has been proposed so far.
In the frame of BEM, as discussed in the introduction of the previous chapter for
the case of a semi-infinite domain, there are two ways to compute the flow confined in
a capillary, either use a Green’s function that takes into account the confinement action
of the channel wall, or use the free space Green’s function and mesh the wall. Each of
these two approaches presents advantages and drawbacks. The first analytical way needs
more development efforts and we have restricted it to the axisymmetric version of the
model since we intend to use this model intensively to lead parametric studies of confined
capillary flows. It largely simplifies the job at the simulation phase by eliminating all
questions concerning inflow and outflow boundary conditions as well as the mesh size for
the wall. These questions must be answered for each new set of operating parameters
for the second numerical approach, but development efforts are limited. Moreover the
second approach is more versatile since it is not limited to capillaries of constant section.
In addition it can be applied in a similar way to the three-dimensional model. Both
approaches will be considered here and compared. This comparison will help us to define
64
Vesicles in a capillary
guides for the axisymmetric computation of vesicles in capillary flows.
Using the three-dimensional description, we can not only build capillaries of non constant section, but we can also focus the attention on non axisymmetric vesicles shapes.
The 3D model will also let us define a range of validity for the axisymmetric computations, in order to perform a meaningful parametric study on confined vesicles using the
faster axisymmetric algorithm. On the other side we will be limited by the the capillary
mesh accuracy, especially for highly confined configurations. Indeed, in 3D we can not
increase too much the number of triangular elements to mesh the capillary boundaries,
in order to keep the computational cost of the algorithm acceptable.
(a) Unbounded Poiseuille flow
(b) Bounded Poiseuille flow
Figure 4.1: Cartoon showing the difference between bounded and unbounded Poiseuille
flow.
Finally let us recall that unbounded and bounded Poiseuille flows are really different
configurations, as represented in Fig. 4.1. The background flow is the same that was
already given in Eq. 2.63, replacing Rp with the effective capillary radius Rc . However
the presence of the wall represents a severe constraint on the shape of the vesicle, that is
physically limited by the capillary radius Rc . Moreover there is no inverse flow beyond
the wall due to the imposed condition u∞ = 0 for r ≥ Rc . In the unbounded case instead
there is an inverse flow for r > Rp , leading to a recirculation flow at the rear of the
vesicle. In other words, for really confined configurations both the confinement and the
curvature of the velocity profile assume a physical meaning and they should be considered
separately. Thus the dimensionless parameters that we will use in this chapter are the
bending capillary number Ca, already defined in Eq. 2.65, and the confinement parameter
β defined by
R0
(4.1)
β=
Rc
which is the ratio between the particle size R0 and the capillary radius Rc . The parameter
β will also be used in the following study to compare vesicles shapes in bounded Poiseuille
flow with those obtained in the unbounded configuration in order to highlight the effect
65
Vesicles in a capillary
of confinement on the shape of the vesicle. For that reason we will focus on a quite large
range of β, from β = 0.1, for which the capillary is 10 times larger then the particle size
and there are no particular differences between the bounded and the unbounded case, until
values of β ∼ 1.8, for which we will observe the shape transition from a parachute-like
to bullet-like shape for a vesicle having the same typical deflation of a RBC. In order to
characterize the strength of the flow stress exerted on the vesicle we will use the bending
capillary number Ca already defined in Eq. 2.65.
This chapter is organized as follows. In the section 4.2 we first present the axisymmetric formulation for confined vesicles into a cylindrical channel, with particular attention
to the numerical integration difficulties. Both the Green’s function taking into account
the confinement action of the channel wall and the free space Green’s function with the
wall meshing are considered. For this last method we propose also a 3D description, that
will be validated and compared to the axisymmetric one.
In section 4.3 the axisymmetric model for capillary flows is validated, considering the
simple case of a falling rigid sphere in a circular pipe. Then, the model is used to address
some open questions concerning the influence of confinement on the stationary shape taken
by a vesicle in a capillary flow. Next, in section 4.6.1, a study of the shapes of vesicles
in bounded Poiseuille flow to study the effects of the reduced volume, the confinement,
and the mean flow velocity is presented, with a focus on the dimple formation in the
parachute-like shape. Finally the attention will be given to non-axisymmetric shapes
of vesicles in bounded Poiseuille flows. In particular we will study the transition from
these non-axisymmetric shapes to axisymmetric ones under the effect of an increasing
confinement.
A part of the obtained results has been the object of a publication (Trozzo et al.,
2014).
4.2
4.2.1
BEM model for vesicles in a capillary
Extension of the axisymmetric Green’s function
In order to study the motion of a vesicle confined in a cylindrical channel we are interested
in the axisymmetric Green’s function M T that takes into account the confinement action
of the channel wall (Fig. 4.2 ). In other words, we require that M T and, hence, the
associated velocity field vanishes on the wall of the tube at r = Rc . Physically, M T
represents the flow produced by a ring of point forces whose axis is collinear with the centre
line of the tube. This kind of Green’s function is simply the sum of two contributions:
a free space contribution M F S developed in the section 2.4.1 and a correction M c to
account for the confinement action of the wall,
MT = MFS + Mc
(4.2)
The latter is given by (Tozeren, 1984; Pozrikidis, 1992a):
c
M = r0
66
Z
0
∞
"
−Frr cos(ẑt) Frz sin(ẑt)
Fzr sin(ẑt) Fzz cos(ẑt)
#
dt
(4.3)
Vesicles in a capillary
Figure 4.2: Cartoon of the geometry confined by a cylinder of radius Rc . In the figure
the point of force is determined by the two coordinates (r0 , z0 ).
where ẑ = z − z0 is the axial distance. The Fαβ are functions of ω = rt , ω0 = r0 t,
ωc = Rc t and t, and involves the computation of the modified Bessel functions of zero-th
and first order I0 ,I1 ,K0 , K1 . They vanish as t tends to zero, except for the Fzz component, which evolves like Fzz ∼ 8 ln t. However, since it’s just a logarithmic singularity,
it’s integrable at the origin using a classical regularization subtracting the logarithmic
singularity. Moreover, the exponential decay for large t guarantees the integrability of all
the Fαβ at any point within the tube.
To validate this new Green’s function we first compute the velocity field in a capillary
of radius Rc = 2 due to a point of force placed into the tube. As shown in Fig. 4.3, the
velocity vanishes at the wall as desired.
4.2.1.1
Numerical integration
The main difference with the free-space case in the numerical computation of the Green’s
function is that while in (2.44) all the terms in the matrix are given coefficients, in
the confined case, in order to find the final Green’s function, the integration should be
performed on a semi-infinite domain. The main difficulty in the numerical computation
of integrals (4.3) is the highly oscillatory nature of the integrands, as shown in Fig. 4.4.
The problem of fast solving with a good accuracy integrals (4.3) has limited the use of
this kind of Green’s function.
In practice, the integration interval must be carefully divided into several zones with
a choice of quadrature adapted to the oscillation frequency of integrands. For finite
domains, a well known quadrature to solve highly oscillatory integrals is the Filon formula
Abramowitz & Stegun (1972), which is a modified Simpson’s rule (see Appendix C). It is
particularly efficient for oscillatory integrals of the form:
67
Vesicles in a capillary
2.5
2
1.5
z
1
0.5
0
-0.5
-1
0
0.5
1
r
1.5
2
Figure 4.3: Velocity field due to a point of force (in blue) into a tube of radius Rc = 2.
2
integrands
0
-2
-4
Mcrr
c
-6
M rz
c
M zr
-8
c
M zz
0
2
4
6
8
10
12
14
ζ
Figure 4.4: The integrands in (4.3) are highly oscillating. In this figure there is an example
of integrands shape (ẑ = 1.5, r̂ = 0.2, Rc = 2) .
S=
68
Z
b
a
f (ζ) sin(kζ)dζ or C =
Z
b
a
f (ζ) cos(kζ)dζ
(4.4)
Vesicles in a capillary
The Filon formula is advantageous over usual numerical integration formulas for
smooth f (ζ), especially for large k, since the number of points which needs to be tabulated
depends on the behaviour of f (ζ) rather than on f (ζ) sin(kζ). For a given function within
a closed interval [a; b], the interval must be divided into several sections. and the sum of
the contributions from each interval gives the desired quadrature formula (see Appendix
C).
error
10-3
10
-4
10
-5
10-6
10-7
10
-8
Mcrr
Mcrz
Mczr
Mczz
10-9
0.001
0.01
0.1
1
(Rc-r0)/Rc
Figure 4.5: Error on the absolute value of the four M c components integrated along the
wall for a point of force at varying distances from the channel wall.
In order to solve integrals (4.3) we have to deal with the extra problem of a semic component
infinite integration domain. Furthermore the order of magnitude of the Mzz
is really high compared to the other ones, as shown in Fig. 4.4, so we need a very accurate
and adaptive method. So we split the integration domain into 4 zones and in each one we
apply a different kind of quadratures. For the first interval from 0 to 10−5 we use Gaussian
quadratures to avoid the singularity at zero. The choice of this interval is made in order
to minimize the error on the integration of the first part of the integral. We have observed
numerically that taking a smaller interval does not improve further accuracy. The second
and the third ones are computed using the Filon method described above with a different
number of integration points n and the last semi-infinite interval is treated using the
Gauss–Laguerre quadratures.
We have tested the accuracy of this integration method on the velocity field of Fig.
4.3. Fig. 4.5 shows the M c components integrated on the wall along the interval [−5 : 5]
for a varying distance of the point of force location from the tube wall. Since the velocity
must be zero on the wall, it is a measure of the computational error there. As shown on
Fig. 4.5, it rapidly decreases as the distance of the point forces from the wall increases
and saturates for very small distances, never exceeding 10−3 .
69
Vesicles in a capillary
4.2.2
Wall meshing alternative
The alternative of using the axisymmetric Green’s function that includes the capillary
wall action (with the numerical integration difficulty mentioned in section 4.2.1.1) is to
consider a capillary of bounded length, using the free space axisymmetric Green’s function
and an explicit representation of the wall by a mesh.
In the case of three-dimensional capsules flowing in arbitrary cross section channels
this method was recently used by Hu et al. (2012).
We take a vesicle profile Γ meshed with m linear elements and n nodes, whose coordinates are defined as xv . The tube wall is meshed with mw triangular elements and
nw nodes, whose coordinates are xw . Thus the vesicle Green’s function Gv will lead to a
matrix of size [(2n), (2n)]. We can build in the same way a matrix [(2nw ), (2nw )] for the
Green’s function Gw on the tube wall taking into account the velocity response on the wall
points to a force density distributed on the wall mesh. In order to build a total Green’s
function G taking into account the vesicle interaction with the meshed boundary, we need
also two other contributions: the first one, that we can call Gvw , takes into account the
force on the vesicle and gives the velocity response on the wall and the matrix Gw
v takes
into account the force on the wall and gives the velocity response on the vesicle. The
velocity on the vesicle membrane is then given by:
p w
uv (xv ) = Gv f m (xv ) + Gw
v f (x )
(4.5)
where f m is the vesicle density of forces and f p is the wall density of forces. The velocity
at the wall, imposed to zero, is given by
up (xw ) = Gvw f m (xv ) + Gw f p (xw ) = 0
(4.6)
from which f p can be expressed as a function of f m
f p (xw ) = −(Gw )−1 Gvw f m (xv )
(4.7)
Using 4.7 in 4.5 one obtains the final expression for the vesicle velocity:
w −1 v m v
v
w
w −1 v
m v
m
uv (xv ) = Gv f m (xv )−Gw
(4.8)
v (G ) Gw f (x ) = [G −Gv (G ) Gw ]f (x ) ≡ Gf
In other words, meshing the wall is a way to construct a numerical approximation of
the extended Green’s function developed analytically above. The quality of the approximation depends on the length of the portion of wall considered, as well as on the quality
of the mesh used.
Of course, building numerically an extended Green’s function can be done in 3D as
well. As for the particle surface, also for the pipe wall triangular elements are adopted as
shown in Fig. 4.6.
70
Vesicles in a capillary
Figure 4.6: Example of a three-dimensional mesh for the pipe wall composed by M w = 400
triangular elements.
4.3
Validation test: sedimentation of a rigid sphere in a
tube
4.3.1
Validation of the capillary axisymmetric model
In order to validate the extension of the axisymmetric formulation to confined capillary
flows, the simple case of a falling rigid sphere already introduced in section 3.6.2 is considered again but in the confined space of a capillary.
0
β=0.9
β=0.8
β=0.6
β=0.5
β=0.2
FS
-10
fz
-20
-30
-40
-50
-60
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
θ
Figure 4.7: Influence of confinement (β = R0 /Rc ) on the axial component fz of the surface
density force profile along a meridian (−π/2 6 θ 6 π/2 from upwind to downwind) of a
settling spherical particle.
The influence of confinement on the axial component of the surface density force
71
Vesicles in a capillary
profile is shown in Fig. 4.7. Relative error on the correction factor K estimation versus
analytical solution is reported in Fig. 4.8 left as a function of the number m of elements
in the particle’s surface mesh. As shown in Fig. 4.8, third order convergence is obtained.
6
0
10
10
m=25
m=50
m=100
m=200
5
10
β=0.97
β=0.95
β=0.8
β=0.3
-1
10
theory
m
-3
4
relative error
K
10
3
10
-2
10
-3
10
2
10
-4
10
1
10
0
10
-5
0.01
0.1
1
10
10
1- β
100
1000
m
Figure 4.8: Correction factor K for a settling spherical particle. Left: comparison to
theoretical predictions of Higdon & Muldowney (1995); Pozrikidis & Davis (2011) as a
function of mesh refinement. Right: Numerical convergence as a function of the number
m of mesh elements (the black line indicates convergence scaling in m−3 ).
4.3.2
Validation of the wall meshing alternative
The alternative of using the axisymmetric Green’s function that includes the capillary
wall action (with the numerical integration difficulty mentioned in section 4.2.1.1) is to
consider a capillary of bounded length, using the free space axisymmetric Green’s function
and an explicit representation of the wall by a mesh. The two questions that arises are:
• How long must the capillary be in the upwind and downwind directions? Or in
other words, how long must the wall mesh be?
• In addition to the question of the mesh refinement needed for the vesicle’s membrane,
what is the mesh refinement needed for the wall mesh?
As illustrated in section 2.4.3, in the Stokes regime the velocity perturbation induced
by the presence of a particle in an unbounded fluid flow decays in r −1 (see Fig. 2.6). This
would indicate that rather extended domains have to be used to ensure that the solution
will not be influenced, or reasonably influenced, by boundary conditions. However, in
72
Vesicles in a capillary
Liron & Shahar (1978) it has been shown that the perturbation flow generated by a pointforce distribution decays exponentially when confined in a circular pipe. And indeed
this can be observed on Fig. 4.9 that illustrates the magnitude of the section mean
perturbation velocity
Z Rc
|u − u∞ |
1
dr
(4.9)
ǫ(z) =
Rc 0
u∞
as a function of axial distance from a settling rigid spherical particle for increasing values
of β and for a vesicle with β = 0.5 (the respective shapes are reported in the middle
bottom of Fig. 4.9).
ε
10
0
10
-1
10
-2
10
-3
10
-4
10
-5
10
-6
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1
β=0.91
β=0.5
β=0.33
FS
vesicle β=0.5
0
1
2
3
4
5
6
7
8
9
10
z
Figure 4.9: Magnitude of the section mean perturbation velocity as a function of axial
distance from the settling particle or vesicle for increasing values of β = R0 /Rc .
From this observation it seems that a shorter capillary length can be used and thus that
the meshing of the wall can be a good alternative for confined capillary flows. However the
decay of the perturbation velocity field cannot be taken as the unique criteria to ensure
an accurate solution. For studies focusing on vesicle shapes, it is the velocity field at the
vesicle’s membrane which is determinant. But very often the preferential indicator used
to characterize the problem is related to force quantities (Lac & Sherwood, 2009). So, in
order to objectively compare the two approaches, we proceed as follows:
• Using the first approach (no wall mesh), we find the minimum number mmin of uniformly distributed mesh elements on the particle’s surface to ensure convergence of
the particle’s surface density force profile at a specified tolerated relative error. Note
that the force profile like the perturbation flow profile has to be upwind/downwind
symmetric for a non deformable spherical particle.
• From these simulations (first approach), we determine the influence length of the
73
Vesicles in a capillary
particle on the background flow (no background flow for a sedimenting sphere) at a
specified tolerated relative error.
• For the second approach, we use a capillary length as determined previously, and
without changing the number mmin of elements for the particle’s surface mesh, we
find the minimum number mw of mesh elements for the wall to retain the same accuracy on the particle’s surface density force profile. This number can be optimized
by using a quadratic refinement rule from tube extremities toward its centre. So it is
refined where needed, that is in the particle region, since the particle’s referential is
used with the particle located at mid length wall. The computations are then made
imposing a zero perturbation velocity condition at inflow and outflow sections.
In this way the two approaches can be considered as equivalent at the prescribed accuracy,
and their computational costs compared.
Considering only the case of a rigid spherical particle and considering that the influence
length is reached when the perturbation flow profile decays to a relative value of less than
10−5 , Fig. 4.9 shows that the minimal capillary’s length in both upwind and downwind
direction is respectively L/R0 = 9, 7 and 5 for 1/β = Rc /R0 = 3, 2 and 1.1. Convergence
of the particle’s surface density force profile up to a relative error of less than 0.1% is
reached for a number of mesh elements on the particle’s surface of 100, 100 and 200 in each
case. The same accuracy for the surface density force is obtained with the second approach
using at least 690, 1820 and 2921 elements for the wall mesh respectively. For example,
convergence is illustrated in Fig 4.10 for the case 1/β = Rc /R0 = 1.1. Computations
are performed on an Intel Core i7 x980 and the ratio of computational cost for the two
approaches are then respectively 2, 0.4 and 0.3, showing that for large enough capillary
radius the wall meshing method is faster, while for strong confinement this method is
slower and less accurate.
-10
No wall mesh m=250
-15
w
m =750
-20
w
m =1400
w
-25
m =2921
fz
-30
-35
-40
-45
-50
-55
-60
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
θ
Figure 4.10: Convergence of a rigid spherical particle’s surface density force profile increasing the number mw of wall mesh elements for the case 1/β = Rc /R0 = 1.1.
74
Vesicles in a capillary
4.4
4.4.1
Convergence study: vesicle in confined Poiseuille flow
Convergence study in function of vesicle’s mesh refinement
The same procedure can be used to characterize and compare the two approaches for a
vesicle in a confined Poiseuille flow. However, the vesicle shape becomes an additional
convergence criteria. We impose the background flow already given in Eq. 2.63, replacing
Rp with the effective capillary radius Rc . The strength of the confinement and of the
Poiseuille flow are controlled with the confinement parameter β and by the bending capillary number Ca as explained in the introduction (Eq. 4.1 and 2.65). Fig. 4.11 compares
the stationary shape taken by the vesicle for three uniform mesh refinements (in the case
∆ = 1.59, 1/β = Rc /R0 = 0.9, Ca = 100). As already observed for the free space configuration, a good description of the shape is obtained even with a relative small number of
mesh elements and the solution quickly converges when increasing their number. Indeed
a small difference can be observed between the shape obtained with 34 elements and that
obtained with 65 elements, and this last shape superposes with that obtained with 120
elements. So a mesh of 65 elements seems sufficient for a good shape description at the
vesicle’s length scale for this set of operating parameters.
Figure 4.11: Convergence of the vesicle’s stationary shape increasing the number m of
mesh elements on the vesicle’s surface (∆ = 1.59, 1/β = Rc /R0 = 0.9, Ca = 100).
Fig. 4.12 top shows the corresponding fr and fz vesicle’s surface density force profiles.
For acceptable accuracy on these quantities, the 65 elements mesh seems sufficient, in
accordance with the shape convergence criteria. Fig. 4.12 bottom shows the shape and
the surface density force profiles for a set of parameters representing a RBC-like vesicle
flowing through a very narrow pore (∆ = 4.8, 1/β = Rc /R0 = 0.55, Ca = 100). In this
case, we have to use a minimum number m = 130 of elements for the vesicle’s mesh.
The lubrication film has a mean thickness of about 0.2R0 for the first case (∆ = 1.59,
1/β = Rc /R0 = 0.9, Ca = 100) and 0.03R0 for the second one (∆ = 4.8, 1/β = Rc /R0 =
0.55, Ca = 100). This gives a minimum element size of about one third of the film
thickness in the first case and about the double of it in the second case. Actually, in
less confined configurations, as illustrated by the first case, it is the vesicle’s shape itself
that imposes the minimum element size, especially in order to be able to describe the
75
Vesicles in a capillary
Figure 4.12: fr (circle labels) and fz (triangular labels) vesicle’s surface density force
profiles as a function of vesicle’s surface mesh refinement, with corresponding vesicle shape
in the bottom of each figure (dashed line represents the wall position). Top: (∆ = 1.59,
1/β = Rc /R0 = 0.9, Ca = 100). Bottom: (∆ = 4.8, 1/β = Rc /R0 = 0.55, Ca = 100).
high curvature region in the corner of the vesicle’s back. In stronger confinements, as
illustrated by the second case, the film thickness criteria becomes more constraining.
4.4.2
Convergence study in function of wall’s mesh refinement
Concerning the second approach (computation with a meshed wall), the perturbation
flow decay criteria leads us for both cases to limit the capillary’s length to 5R0 in both
upwind and downwind directions. It must be underlined that, contrary to the spherical
particle case, the quadratic refinement strategy to minimize the number of elements for
the wall isn’t adequate for an elongated vesicle. So, for the wall mesh, we use instead
an uniform distribution of elements, as for the vesicle’s surface. The minimum elements
number determined by the accuracy criteria on the vesicle’s surface density force is then
103 for the first case and 1451 for the second. Comparing computational time, it appears
that the first approach becomes more advantageous as the confinement increases. For
example, for the second case we obtain a computational time ratio of 0.8.
The wall meshing alternative in 3D can then be compared to axisymmetric computation to test its accuracy. In order to perform a meaningful comparison, we will take a
76
Vesicles in a capillary
set of parameters such that the final shape of the vesicle in the bounded Poiseuille flow is
expected to be axisymmetric. Let us remind that for 3D computations the length of the
meshed wall is chosen as the same as in the axisymmetric case and the dynamics of the
vesicle is studied until the equilibrium shape is reached.
Fig. 4.13 shows stationary shapes obtained by the 3D code and the axisymmetric one
in the presence of an externally imposed bounded Poiseuille flow. The three-dimensional
simulations are made using a vesicle mesh composed by N = 642 nodes and M = 1280
triangular elements, while the cylindrical pipe is modelled with N w = 266 nodes and
M w = 528 triangular elements in the case β = 0.5, while for β = 0.33 we use N w = 362
nodes and M w = 720 elements. The longitudinal profile on the plane xz obtained by
3D simulations and the axisymmetric profiles perfectly superimposed. It implies that
the moderate tube mesh is appropriate for our simulations. The same good agreement
between stationary shapes is obtained for a large range of control parameters.
1.5
1.5
3D
AXI
3D
AXI
1
0.5
0.5
z
z
1
0
0
-0.5
-0.5
-1
-1
-0.8 -0.6 -0.4 -0.2
0
x
0.2 0.4 0.6 0.8
1
-1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
x
Figure 4.13: Left: Comparison of final shape obtained by the 3D code and the axisymmetric one for a vesicle with ∆ = 0.42 immersed in an bounded Poiseuille flow with β = 0.33
and Ca = 100. Right: In this case the control parameters are ∆ = 0.6, β = 0.67 and
Ca = 100.
77
Vesicles in a capillary
4.5
Axisymmetric equilibrium shapes in a capillary
Shape dependence on initial conditions
A non-trivial issue is the vesicle final shape dependence on initial conditions. In Hu et al.
(2014) the authors show that, for weak confinement and very low capillary number (Ca =
1), final shapes obtained starting from oblate and prolate configurations are not the same.
They obtain a parachute-like shape with a concave rear part in the first case and a bulletlike shape with a convex rear part in the second one. We would like to know if for larger
values of Ca this result is still valid. In order to answer this question we considered
different initial shapes (prolate and oblate), having the same values of ∆ = 0.2, β = 0.5,
and Ca = 100. Then we follow their dynamics over the time. Fig. 4.14 clearly shows
that the two dynamics tend toward the same final shape. Repeating the same experience
with ∆ = 0.9 and β = 0.3 like in Hu et al. (2014) but increasing the capillary number
to Ca = 100, we obtain the same final shape both in the prolate and oblate case. We
can therefore assume that for large enough capillary number the initial shape, even if it
strongly modifies the dynamics, plays no role on the final shape.
Figure 4.14: Time evolution of the vesicle shape with ∆ = 0.2 in a tube with β = 0.5
under the action of a Poiseuille with Ca = 100. Selected times are t = 0; 0.01; 0.03; 0.13.
Shape dependence on the capillary number
Afterwards we investigate the effect of the capillary number on the final shape of the
vesicle. This shape will give indications on the hydrodynamic stresses on the object. It is
generally observed that increasing the flow velocity, or the confinement, leads first to an
increase in the fore-aft asymmetry, then to the apparition of a negative curvature region
at the rear, and eventually, at least for membraneless objects, to breakup Coupier et al.
(2012). We are interested to know if, increasing the capillary number Ca, the final shape
converges to a defined profile. For Ca = 0 there is no flow in the channel, thus the
equilibrium shape simply comes from the minimization of the bending energy and does
78
Vesicles in a capillary
depend only on the value of the reduced volume, as discussed in section 1.3.1. Since
the capillary number is the ratio between the flow strength over the membrane bending
mode, the limit Ca → ∞ corresponds to an infinitely small bending resistance, thus
suppressing any competition between driving forces (incompressible drop). In this case
the final shape would be independent on the capillary number and there would be no
resistance to bending. Fig. 4.15 shows the resulting final shape for a deflated vesicle in
a bounded Poiseuille flow, characterized by a confinement β = 1.11, and increasing flow
strength. For a small Ca the profile is more symmetric between the front and the rear, and
there is no negative curvature region at the rear. On the contrary, increasing the capillary
number the rear of the vesicle becomes almost flat, until reaching a limit profile that does
not change for higher values of the flow strength. This result is particularly interesting
because, for a given vesicle in a capillary, the equilibrium shape will be comprised between
these two limit profiles.
Ca=0
Ca=0.1
Ca=1
Ca=10
Ca=100
Ca=1000
Ca=infty
1
r
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
z
Figure 4.15: Convergence of the final shape increasing the capillary number. In this example the vesicle has ∆ = 0.9 and it is immersed in a bounded Poiseuille with confinement
β = 1.11.
Shape dependence on the confinement
It is interesting, and potentially useful, to analyse the effect of confinement, by comparing
results coming from simulations with bounded and unbounded Poiseuille flow. First we
want to validate the key assumption of Kaoui et al. (2009a) that for β . 0.1 the presence
of lateral walls can be disregarded. Our second goal is then to study the equilibrium
shape changes reducing the Poiseuille radius in both cases.
The final shape at β = 0.1 is the same for both bounded and unbounded configuration,
as shown in Fig. 4.16a. Decreasing the Poiseuille radius (and thus the wall distance in
the bounded case) the final shape is not the same for the two configurations (Fig. 4.16b
and Fig. 4.16c). This result shows that for strong confinement (β & 0.5) the presence
of the wall should be taken into account in order to well investigate the final shape of
79
Vesicles in a capillary
3
3
tube
FS
3
tube
FS
3
tube
FS
2
2
2
2
1.5
1.5
1.5
1.5
z
2.5
z
2.5
z
2.5
z
2.5
1
1
1
1
0.5
0.5
0.5
0.5
0
0
0
0
-0.5
-0.5
0 0.2 0.4 0.6 0.8 1 1.2
r
(a) β = 0.1
-0.5
0 0.2 0.4 0.6 0.8 1 1.2
r
(b) β = 0.2
tube
FS
-0.5
0 0.2 0.4 0.6 0.8 1 1.2
r
(c) β = 0.5
0 0.2 0.4 0.6 0.8 1 1.2
r
(d) β = 0.87
Figure 4.16: Comparison of final shapes for bounded and unbounded configurations. For
weak confinement the two profiles superimpose, but increasing the confinement the final
shape is not the same for the two configurations.
vesicles in capillaries.
Comparison to experiments
We present now a comparison of our results with experiments on giant lipid vesicles flowing through cylindrical capillaries with a diameter close to the vesicle size and a constant
imposed flow rate. Experiments show that significant deformation of the membrane occurs and increases when the velocity, confinement or deflation of the vesicle are increased
(Vitkova et al., 2004). As they flow, isolated vesicles experience a lift force that pushes
them away from the wall (Abkarian et al., 2002). For very small density difference between the interior and exterior fluids, vesicles tend to align along the axis of the channel.
The steady-state flow and vesicle shapes are then axisymmetric. Fig 4.17 shows the
comparison between experimental and simulated shapes for several values of deflation,
confinement and flow velocity. Predicted final shapes match very well with the images
resulting from experiments in a quite large range of ∆, β and Ca.
Sedimentation in a capillary
Finally we present some results on the tether deformation for vesicles confined in a capillary. For freely suspended vesicles under flow, membrane tubes are observed experimentally for shear, acoustic-driven , elongational and settling flows. In the case of an
initial prolate, just after the release, the shape evolves rapidly, leading to the formation
80
Vesicles in a capillary
Figure 4.17: Comparison of simulations and experimental results obtained in
Vitkova et al. (2004). Vesicles are flowing from left to right. The three vesicles are
characterized by: ∆ = 0.45, β = 0.8, Ca = 10 ; ∆ = 1.7, β = 0.67, Ca = 30; ∆ = 2,
β = 0.4, Ca = 60.
of a protrusion at the rear of the vesicle. This protrusion thus elongates, and a thin
tether connecting a quasi-spherical mother vesicle of radius R to a quasi-spherical daughter vesicle of radius R2 develops. Starting from a free space settling vesicle presented in
Boedec et al. (2013) we study the evolution of the tube length reducing the confinement
from β = 0.1 up to β = 0.87. For β . 0.2 we already expect no significant variations from
the shape obtained in the free space configuration, but for lower confinement we observes
a drastic reduction of the tube length, as shown in Fig. 4.18. In particular at β = 0.5 we
find the typical pear-like shape already studied in Boedec et al. (2011b) and at β = 0.87
the extrusion completely disappears.
FS
β = 0.2
β = 0.5
β = 0.87
1
r
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
z
Figure 4.18: Vesicle profile for different values of β. The vesicle has ∆ = 0.93 and
B0 = 216.
81
Vesicles in a capillary
4.6
4.6.1
Parametric study for axisymmetric vesicles in a capillary
Shape transition
Although the behaviour of vesicles or RBSs in confined Poiseuille flow was already considered in some previous investigations (Vitkova et al., 2004; Noguchi & Gompper, 2005b;
Coupier et al., 2012; Hu et al., 2014), a parametric study of vesicles shapes is still missing
when confinement becomes significant.
The dimensionless control parameters leading the problem of a vesicle flowing into a
narrow capillary are:
• excess area ∆, measuring the additional area of the vesicle compared to the sphere
of the same volume
• the bending capillary number Ca, reflecting the intensity of the stress exerted on
the vesicle
• the ratio β = R0 /Rc between the particle size R0 and the capillary radius Rc .
Using the immersed boundary method, a preliminary study of the shapes of vesicles in
bounded Poiseuille flow to study the effects of the reduced volume, the confinement, and
the mean flow velocity is already proposed by Hu et al. (2014). More deformed shapes
are found for smaller reduced volumes. Moreover, the equilibrium shape turns from a
parachute-like shape into a bullet-like one as the confinement gets stronger.
In Noguchi & Gompper (2005b) it was observed that for more deflated vesicles they
retain their discoidal shapes in slow capillary flows.
In Coupier et al. (2012), authors build a phase diagram of shapes (classified as bullet,
croissant, and parachute) in a square cross-section channel of varying aspect ratio and
confinement, and discuss the possible effect of the flow asymmetry. For asymmetric
channels, when vesicles flow from narrow to wide sections, their in-plane section becomes
less asymmetric between the front and the rear, and the negative curvature region at the
rear, if any, disappears. On the contrary, increasing isotropically the confinement leads
actually to less curved shapes. The same conclusion is reached if the flow strength is
increased at a given confinement. Finally, for asymmetric channels, four vortices appear
on the surface. These surface vortices of non-negligible velocity imply important motions
of the fluid inside the vesicle.
Here, we study the shapes of vesicles in axisymmetric Poiseuille flows, focusing our
attention on shape changes when varying the control parameters. First of all, in Fig. 4.19
we note that for a weak confinement (β = 0.33) the transition between bullet-like and
parachute-like shapes is around the value v = 0.95, in good agreement with 2D results on
the unbounded Poiseuille flow (Kaoui et al., 2009a). This result confirms the assumption
already validated in 4.5 that for weak confinement the presence of lateral walls can be
disregarded. Some weakly deflated vesicles show no concave shape in the explored β range
and are, therefore, always bullets. Fig. 4.20 shows the bullet-parachute phase diagram
(v; Ca) plane for not too confined vesicles (β < 0.5), that is when the channel radius is al
least two times larger than the vesicle size. In this regime, a clear separation between the
82
Vesicles in a capillary
0.95
0.95
0.9
0.9
v
1
v
1
0.85
0.85
0.8
0.8
0.75
0.75
10
100
1000
10000
10
Ca
100
1000
10000
Ca
Figure 4.19: Bullet-parachute phase diagram in the reduced volume - capillary number
(v; Ca) plane for two different confinements: β = 0.33 (left) and β = 0.87 (right). Red
points represent bullet like shapes, while blue points indicate parachute like shapes. Independently of the flow strength a clear difference on the shape transition between the
two situations is observed.
1
0.98
0.96
v
0.94
0.92
0.9
0.88
10
100
1000
10000
Ca
Figure 4.20: Bullet-parachute phase diagram in the (v; Ca) plane for not too confined
vesicles. In the figure are represented all the numerical points characterised by β < 0.5.
bullet and parachute domains is achieved, even if β varies over a large range (from 0.1 to
0.5). Also this result is in good agreement with the transition theoretically studied and
experimentally observed in Coupier et al. (2012).
Increasing the confinement the transition shifts towards lower values of reduced volume
(as shown on Fig. 4.19), so the bullet shape is favoured upon an increase of confinement.
83
Vesicles in a capillary
While, for weak confinement, the parachute to bullet crossover depends only on the capillary number, the situation is completely different for more confined vesicles.
1
Numerical: Bullet
Numerical: Parachute
Experments: Bullets
Experments: Parachute
0.98
0.96
v
0.94
0.92
0.9
0.88
0
0.2
0.4
0.6
0.8
1
1.2
1.4
β
Figure 4.21: Bullet-parachute phase diagram in the (v; β) plane. Dots refer to present
simulations, while crosses represent experimental data of Coupier et al. (2012). The values
of capillary number vary over four orders of magnitude (101 ≤ Ca ≤ 104 ).
Fig. 4.21 shows the bullet-parachute phase diagram (v; β) for values of capillary
number varying over four orders of magnitude, compared with consistent experimental
results of Coupier et al. (2012) obtained on a square cross-section channel. The good
agreement between numerical and experimental results validates our method over a large
range of control parameters. Furthermore it shows that the specific geometry of the
channel does not affect to much the bullet-parachute transition line.
When the confinement is large enough, its effect is dominant. This indication shows
that for strong confinements the final shape will not depend too much on the capillary
number. We can thus study the shape transition for highly confined vesicles at a fixed
Ca without loss of generality.
It can be interesting, and potentially useful, to extend the transition line up to the
typical deflation value of a RBC (v ∼ 0.6), in order to have a rough estimation of the
confinement needed to observe the transition from bullet to parachute shape for RBCs in
narrow capillaries. The purpose of this study is to examine the validity of the hypothesis
that for highly confined configurations RBCs and vesicles share some similar mechanical
behaviours. Fig. 4.22 shows the shape transition line from bullet to parachute like
shape with respect to the confinement β from small to large deflations. First of all we
note that for a confinement parameter β greater then 0.6 the transition line decreases
linearly. The confinement value corresponding to the transition for a typical deflation of
a RBC is β ∼ 1.8, that is the capillary radius is almost half of the particle size (human
red blood cells have a mean volume of about 90 µm3 , leading to an average radius of
R0RBC ∼ 3 µm). Fig. 4.23 shows a RBC flowing in a 3 µm diameter glass micropipette
84
Vesicles in a capillary
1
0.95
0.9
0.85
v
0.8
0.75
0.7
0.65
0.6
0.55
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
β
Figure 4.22: Left: Shape transition line from bullet to parachute for Ca = 100 with
respect to the parameter β. For strong confinement the final shape is independent of
Ca so we can fix it to a constant value without loss of generality. The black line is the
linear fit and has an inclination coefficient a = −0.29. Right: Profile at the transition
bullet-parachute for a vesicle with the same typical deflation of a RBC (v ∼ 0.6). The
confinement is β ∼ 1.8.
due to a pressure difference between the edges of the capillary (Jay, 1973). Under this
confinement, no parachute-like shape is observed and the experimental profile is similar
to the corresponding vesicle one shown in Fig. 4.22. This result confirms the validity of
using vesicles as a simplified model for RBCs. Indeed, although RBCs behave differently
from vesicles due to the shear elasticity of their plasma membrane, they also share some
similar mechanical behaviours with vesicles, especially when capillary size is comparable
to cell diameter.
Figure 4.23: A Red Blood Cell flowing in a 3 µm diameter capillary. No parachute-like
shape is observed. Image from Jay (1973).
85
Vesicles in a capillary
4.6.2
Dimple formation
In the previous section we have shown that a deflated vesicle in a confined Poiseuille flow
turns into a parachute-like shape and develops a dimple starting from critical values of
characteristic parameters of the systems. For smaller reduced volumes more deformed
shapes are found, the curvature at the rear of the vesicle becomes more negative and the
dimple increases his size.
β=1
β=0.87
β=0.667
β=0.2
1
r
0.8
0.6
0.4
0.2
0
-0.5
0
0.5
1
1.5
2
2.5
3
z
∆=0.9
∆=1.17
∆=1.45
∆=1.59
∆=2
1
r
0.8
0.6
0.4
0.2
0
-0.5
0
0.5
1
1.5
2
2.5
3
z
Figure 4.24: Evolution of the dimple changing characteristic parameters (the confinement
(top) and the excess area (bottom)) around the value ∆ = 1.17 , β = 0.87 and Ca = 100.
The dependence on the capillary number is low and induces no sensible changes in the
final shape.
Having studied the bullet-parachute shape transition of a vesicle in a bounded flow, we
switch now to the dimple evolution with respect to the characteristic parameters. We thus
select a vesicle shape with a zero curvature in the rear and then vary the set of control
parameters to observe the resulting shape changes. In Fig. 4.24 we take as starting
shape the one corresponding to ∆ = 1.17 , β = 0.87 and Ca = 100 and we show the
different shapes changing characteristic parameters around this value. The dependence
86
Vesicles in a capillary
on the capillary number seems to be weak and to induce no sensible changes in the final
shape. The situation is different for what concerns the confinement and the deflation,
which play an important role in the dimple evolution. As expected, increasing the excess
area more deformed shapes are found. The same behaviour is also observed decreasing
the confinement.
Fig. 4.25 shows quantitatively the dimple height evolution with respect to the deflation
of the vesicle. Increasing the excess area ∆ (or decreasing the reduced volume v) the
dimple develops and increases linearly with the excess area, always with the same rate
independently of the confinement. Moreover the dimple formation critical point shifts to
higher values of excess area for stronger confinements, as previously observed. In Fig.
4.25 is shown also the behaviour of the dimple height in the unbounded configuration.
In this case Rc must be replaced by the fictitious radius Rp in the definition of β. As
expected, for weak β (β . 0.5) the behaviour of the dimple is similar for the bounded
and the unbounded configuration.
0.5
0.4
β=1.54
β=1.33
β=1.11
β=0.87
β=0.5
β=0.2
β=0.1
0.45
0.4
0.35
0.3
0.25
dimple
0.3
dimple
β=0.5
β=0.2
β=0.1
0.35
0.25
0.2
0.2
0.15
0.15
0.1
0.1
0.05
0.05
0
0
0
0.5
1
1.5
2
∆
2.5
3
3.5
4
0
0.5
1
∆
1.5
2
Figure 4.25: Left: Dimple height with respect to the excess area for increasing values of
the confinement β. Right: Same results for an unbounded Poiseuille flow. In both cases
the simulations are performed using Ca = 100.
We now investigate if the dimple formation is governed by an universal process and
if, scaling conveniently the characteristic parameters, it is possible to recover an universal
behaviour. For a given value of β, we define ∆c as the critical value of the excess area
for the dimple to appear. Fig. 4.26 shows the height of the dimple as a function of the
rescaled excess area ∆resc = ∆ − ∆c for values of the confinement varying over an order
of magnitude. The superposition of all the curves provides confirmatory evidence that
the increase of the dimple follows the same behaviour, independently of the value of the
confinement.
87
Vesicles in a capillary
β=1.11
β=0.87
β=0.5
β=0.2
β=0.1
fit a*x , a=0.262
0.4
0.35
dimple
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.2
0.4
0.6
0.8
∆resc
1
1.2
1.4
Figure 4.26: Height of the dimple in the capillary with respect to the rescaled excess area
∆resc for Ca = 100 and different values of the confinement.
4.7
Non axisymmetric shapes
Experimental studies have shown that the most commonly stationary vesicle’s shapes are
axisymmetric bullet and parachute like shapes, until these shapes destabilize to 3D shapes
like slippers (Vitkova et al., 2004; Coupier et al., 2012).
In order to identify the minimal ingredients that are needed for the slipper shape and
whether or not the cytoskeleton is essential, in Kaoui et al. (2009a) authors numerically
study the motion of a vesicle in a two-dimensional Poiseuille flow and show that the
adoption of a slipper shape causes a significant decrease in the velocity difference between
the cell and the imposed flow. Neither confinement nor membrane shear elasticity seems
to be a necessary ingredient for the slipper to appear. However, it is questionable that
the simplified 2D models can provide quantitatively accurate results of the motion of a
vesicle which is inherently three-dimensional.
More recently, a systematic study (Farutin & Misbah, 2014) on the stability and bifurcation of a centred parachute shape and on the cross-streamline migration of vesicles
in 3D in an axial Poiseuille flow has shown that, reducing the flow strength, the parachute
shape undergoes spontaneous symmetry-breaking bifurcations into a croissant shape and
then into slipper shape. Regarding migration, the vesicles either migrate towards the centre, or migrate indefinitely away from it, or stop at some intermediate position, depending
on control parameters values.
Vesicles and RBCs both have inextensible membranes and exhibit bending modes
of the same order of magnitude. The main difference is that RBCs are endowed with
an in-plane shear elasticity by virtue of their cytoskeletons. Also in bounded threedimensional Poiseuille flow, if the confinement is not strong enough, non axisymmetric
shapes of vesicles could be observed (Noguchi & Gompper, 2005b). They become ax88
Vesicles in a capillary
Figure 4.27: Example of a slipper shape obtained by the 3D code for a vesicle with
∆ = 1.11 immersed in an bounded Poiseuille flow with β = 0.33 and Ca = 10. Arrows
indicate the velocity field on vesicle membrane.
isymmetric when the confinement is increased beyond a critical value, which strongly
depends on the other control parameters. Also for RBCs, non axisymmetric slipper-like
shapes have been observed in in vivo experiments in microvessels (Skalak & Branemark,
1969). The slipper-like shapes have also been frequently revealed in in vitro experiments
in straight glass cylindrical tubes of radius comparable to the RBC size (Secomb et al.,
2007; Tomaiuolo et al., 2009). The reasons of why RBCs often show asymmetric shapes
in a symmetric tube are a puzzle in blood microcirculatory research.
A full 3D model is necessary to describe the vesicle dynamics behaviour in confined
channel for arbitrary cross-section shapes. Over the years, great progress has been made
in constructing 3D models for such a confined flow. In Hsu & Secomb (1989) authors have
developed a 3D theoretical analysis for the flow of asymmetric RBCs along a cylindrical
tube. They showed that the membrane tank-treading motion helps to reduce the flow
resistance. A more general model was proposed by Pozrikidis (Pozrikidis, 2005b) using
a boundary-element method to describe the 3D motion of an elastic capsule enclosed
by a neo-Hookean membrane in a cylindrical tube with a circular cross-section. In the
paper it is shown that, while discoidal cells initially positioned at the axis of a cylindrical
tube develop parachute-like shapes, cells initially placed at intermediate orientation angles
develop slipper-like shapes.
The problem of spontaneous symmetry breaking and migration of a three-dimensional
vesicle in unbounded axisymmetric Poiseuille flow was also studied first analytically
(Farutin & Misbah, 2011) and then numerically (Farutin & Misbah, 2014). Varying the
capillary number, the reduced volume and the viscosity contrast, the authors find that the
parachute shape undergoes spontaneous symmetry-breaking bifurcations into a croissant
shape and then into slipper shape. This shape is a robust feature that occurs in both
planar and cylindrical Poiseuille flows. It is interesting and potentially useful to extend
89
Vesicles in a capillary
1.5
FS β=0.2
β=0.33
β=0.5
β=0.667
β=0.87
1
0.5
z
0
-0.5
-1
-1.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
x
Figure 4.28: Transition from non axisymmetric (slipper) to axisymmetric (parachute)
shape increasing the confinement β for a vesicle with ∆ = 1.11 immersed in a bounded
Poiseuille flow with Ca = 10.
the study of this transition to bounded Poiseuille flows.
In this section we report our results on asymmetric three-dimensional vesicles shapes
in a bounded Poiseuille flow. The attention is devoted to the shape transition of a threedimensional vesicle from non-axisymmetric to axisymmetric shape for increasing confinements. Starting from an initially slipper shape in an unbounded Poiseuille flow, we first
observe the vesicle shape when the domain is bounded (Fig.4.27). Increasing the confinement must lead to a reduction in the asymmetry of the vesicle profile, thus to a transition
to a croissant shape. This configuration enjoys only two mirror symmetry planes which
are orthogonal to each other: the in-plane shape is convex, while the orthogonal shape is
concave. If the confinement is high enough the three-dimensional equilibrium shape will
be axisymmetric, firstly like a parachute and than a bullet.
Fig. 4.28 shows the cross section by symmetry plane of the equilibrium shape of a 3D
vesicle with ∆ = 1.11 in Poiseuille flow with Ca = 10 for different values of confinement.
For this deflation and flow strength the equilibrium shape of the vesicle in an unbounded
Poiseuille flow is a slipper, whatever the value of the Poiseuille radius Rp . If we put the
vesicle in a confined Poiseuille flow and we increase the confinement β, the profile becomes
more axisymmetric. As shown in Fig. 4.29 the vesicle has a croissant shape for average
values of confinement (β ∼ 0.5) and it is fully axisymmetric for even higher values of the
confinement (β > 0.67). The same transition can be also observed for different values of
vesicle deflation and flow strength. The general tendency is that high confinement favours
parachute, while at small β croissant and slipper prevail. It is also observed that smaller
90
Vesicles in a capillary
Figure 4.29: Side and rear view showing the transition from asymmetric slipper (left)
to axisymmetric parachute (right) shape passing through the croissant shape (centre)
increasing the confinement β for a vesicle with ∆ = 1.11 immersed in a bounded Poiseuille
flow with Ca = 10. From left to right the confinement is β = 0.5; 0.667; 0.87 and colours
refer to the mean curvature.
v facilitate bifurcation from parachute to croissant and to slipper, as already observed
in the unbounded case. However, a more exhaustive analysis of this subject is needed.
In particular further research should include the construction of a shape diagram with
respect to the deflation and the confinement, in order to characterize the slipper-parachute
transition for a wide range of β.
91
Vesicles in a capillary
4.8
Summary
In this chapter we have presented an extension of our model for confined vesicles into
cylindrical channels. There are two ways to compute the flow confined in a capillary, either
use a Green’s function that takes into account the confinement action of the channel wall,
or use the free space Green’s function and mesh the wall. While the analytical approach
can be used only for the axisymmetric model since in the 3D case it would be too hard
and not enough accurate, the second one can be applied in a similar way both to the
three-dimensional and the axisymmetric model. Although the axisymmetric model is
much more efficient than the three-dimensional one, a 3D model let us define a range of
validity for the axisymmetric computations, in order to perform a meaningful parametric
study on confined vesicles using the faster axisymmetric algorithm. Moreover, outside
this range, the 3D model is useful to characterize non axisymmetric shapes in capillary
flows and the transition from non-axisymmetric to axisymmetric shapes increasing the
confinement. On the other side we will be limited by the the capillary mesh accuracy,
especially for highly confined configurations.
For what concerns the first approach main efforts concern the implementation of an
appropriate axisymmetric Green’s function, that we have described in section 4.2.1. In
section 4.2.1.1 we have proposed a way to overcome the difficulty of numerical integration
of the highly oscillating additional terms to the free space Green’s function. Its accuracy
has been then demonstrated on the case of a sedimenting spherical particle in a capillary,
for which theoretical results exist. For the second approach, we have used the computations with the first one to determine the minimal capillary length in order to impose
non perturbing inflow and outflow boundary conditions. The question of mesh refinement
has been answered in the same way, determining the optimal mesh for the particle with
the first approach and that for the wall with the second. We have then extended this
characterizing study to the case of vesicles in capillary bounded Poiseuille flows, determining optimal meshing rules in relation to the vesicle’s shape and/or to the lubrication
film thickness. From the point of view of computational cost, the two approaches appear
comparable with an advantage to the second for lower confinement configurations and to
the first when strongly confined.
In order to validate the 3D model we have performed in section 4.4.2 a comparison between axisymmetric results and three-dimensional final shapes for the same set of
parameters, obtaining a good agreement.
The axisymmetric approaches seem promising to study the influence of confinement
on vesicle’s shape in a very large range of confinement. We have shown that for confinement parameters β greater than 1/2, considering unbounded Poiseuille flows is no longer
possible. Actually the confinement action of the capillary wall must be considered. The
comparison to experimentally observed shapes is highly satisfactory, and we have already
brought an answer on the open question concerning the importance of the vesicle’s initial
shape.
The axisymmetric model permit also to perform a parametric study of vesicles shapes
with respect to the three main control parameters, namely the deflation, the confinement
and the flow strength, in order to characterize the transition between bullet-like and
parachute-like shapes in confined flows. The comparison with available experimental
92
Vesicles in a capillary
results is satisfactory. Moreover the results presented for a set of operating parameters
typical of red blood cells flowing through very narrow pores show that we are able to
consider highly confined situations with lubrication film thickness as low as five percent
of the capillary’s radius.
93
Chapter 5
Towards a RBC model
5.1
Introduction
The mechanical deformation characteristics of living cells are known to influence strongly
their chemical and biological functions and the onset, progression and consequences of
a number of human diseases, such as malaria and anemia. Among all types of cells,
RBC possesses one of the simplest and best characterized molecular architectures. The
deformation of human red blood cell (erythrocyte or RBC) has long been a topic of
considerable scientific interest. In the real life, it influences not only its physiological
function in oxygen transport, but also the hydrodynamical properties of normal human
blood, where the hematocrit, defined as the volume fraction of RBCs, is about 40%−45%.
The human red blood cell has a biconcave shape, an average diameter of about 8 µm
and a thickness of about 2 µm as its rest shape. The mean volume is about 90 µm3 and
the average surface area of a RBC is about 135 µm2 , a value greater than the surface area
of a sphere with the same volume.
Without a nucleus, a RBC contains a cytosol enclosed within a highly flexible yet
surprisingly strong membrane. Essential to its structural integrity and stability is this
composite membrane consisting of a lipid bilayer supported from inside by a spectrin
network of cytoskeletal proteins. The high deformability of the membrane leads the RBC
to change its shape when an external force is acting on it and return to the biconcave
resting shape after the removal of the force. The lipid molecules comprising the lipid
bilayer can slide past each other relatively easily, but strongly resist being pulled apart.
In this sense, the membrane behaves like a two-dimensional incompressible fluid.
RBC has a typical life span of 100 − 120 days during which time it circulates through
the human body. During its circulation, it undergoes severe elastic deformation as it
passes through narrow capillaries whose inner diameter is as small as 3 µm. The biconcave
shape of the RBC is transformed into a bullet shape during blood flow through small
capillaries (Fig. 5.1), and the cell recovers fully to its original shape when the constraint
or loading causing the shape change is released. Sometimes the loading associated with
such deformation may also affect the structural integrity of the cell.
Characterization of RBC deformation has been achieved through a variety of experimental techniques. Most common among these methods is the micropipette aspiration
95
Towards a RBC model
Figure 5.1: Red blood cells flowing in a microfluidic device Burns et al. (2012). RBCs
undergo folding deformations when traversing small capillaries.
technique (Evans, 1973; Hochmuth & Waugh, 1987; Hochmuth, 2012), in which the stepwise increase of a suction pressure causes the cell to be drawn into a glass tube. The
channel diameter and the aspiration pressure are chosen so as to control the extent of
deformation. By matching the experimentally observed geometry changes with the theoretically predicted responses, it is possible to extract some important parameters of the
cell membrane, such as the elastic modulus, viscosity and characteristic time for relaxation
(Evans & Skalak, 1980).
Experimental techniques of laser or optical tweezers were also used to investigate systematically the large deformation characteristics of the human red blood cell in direct
stretch, with maximum force resolution on the order of 1 pN. The applied forces ranges
from tens to hundreds of pN. The optical tweezers method can be used to stretch the
cell directly in one ore more directions by trapping beads that are strategically attached
to the cell surface through specific binding. Systematic experiments on healthy RBCs
(Mills et al., 2004), as well as RBCs invaded by the malaria parasite (Plasmodium falciparum) (Glenister et al., 2002) were performed with loading forces which are capable of
stretching the RBC axial diameter to twice of its original diameter.
Despite extensive investigations in the past few decades, there are still many remaining questions about the mechanics of erythrocyte. For example, it is still not fully understood what determines its resting shape. The importance of understanding elastic
and viscoelastic deformation characteristics of the red blood cell motivated a number of
experimental (Skalak et al., 1973; Abkarian et al., 2007; Tomaiuolo et al., 2009), theoretical (Canham, 1970; Seifert et al., 1991; Hansen et al., 1997) and numerical (Secomb et al.,
1986; Pozrikidis, 2005a; Fedosov et al., 2010b; Li et al., 2013) studies.
There is no universal consensus on the reference shape that should be adopted in
order to well describe the real deformation of a RBC under external solicitations. The
96
Towards a RBC model
two major opinions are that the reference shape of the skeleton should be either a sphere
either the resting biconcave shape. A numerical study using Monte Carlo simulation for
determining the effect of the cytoskeleton reference shape upon the resting shape has
indicated that the reference shape should be a spheroid (Lim H. W. et al., 2002). Later,
experiments on deformations of RBCs under the effect of a shear flow have suggested that
the reference shape can not be spherical (Fischer, 2004). Moreover, it was also found that
RBCs have a memory of their initial shape. Further experiments on RBCs under shear
flow has finally found that the cytoskeleton reference shape should be a spheroid close to
a sphere. Recently, a multiscale numerical study on RBCs under low shear rate flows, has
confirmed the prediction of Lim H. W. et al. (2002) that the best choice for the stress-free
state is a spheroid close to a sphere (Peng et al., 2014; Cordasco & Bagchi, 2014).
In their review on the numerical model of RBCs, Li et al. (2013) explains that there
is mainly two approaches to study RBCs in fluid flows.
The first is the classical continuum approach in which the suspending fluids as well as
the RBC membrane itself is considered as a continuous material medium. Thus this approach is largely inspired by the numerical methods developed in mechanical engineering
like finite elements, finites volumes, finites differences and all the recent developments to
track interfaces in multi-fluid flows. In this point of view, the RBC is most often seen as
a capsule of polymerized membrane having hyperelastic or viscoelastic elastic properties.
The fact that the membrane is made first of all by a lipid bilayer on which the elastic
cytoskeleton is anchored disappear generally. It’s only the area conservation constrained
that one tries to respect by working at the incompressible limit of the membrane elastic
constitutive law.
The second comes from the molecular world, where any medium is seen as a huge
number of molecules, submitted to thermal agitation and to intermolecular forces. Thus
this approach benefits from the methods developed by physicists and chemist, like Monte
Carlo methods and Dynamic molecular simulations. However, to be able to resolve much
larger space and time scales, those needed to study transport of RBC in fluid flows, coarse
graining methods have appeared. Each particle instead of representing one atom or one
molecule, represents a full set of them. And the level of coarse graining characterizes the
crudeness with which the molecular level of the medium is represented. In this view, one
does not want to represent exactly the molecular reality but to built a system that can
simulate accurately the real system at the desired scale. But it lets also the possibility to
represent very finely the medium, if enough computer power is available, when needed.
And of course, the micrometrical size of RBCs and all their biomimetic counterparts
like vesicles and capsules, with a membrane made of two molecules in the thickness for
the lipid bilayer of RBCs and vesicles, explains why both approaches cohabit. Actually,
one could see the continuum approach as the ultimate state of coarse graining. However
in that ultimate state, the molecular structure is fully integrated and forgotten, bringing
new rules of interaction typical of continuum mechanics.
In their review, Li et al. (2013) advocates for developing new numerical methods by
mixing the two approaches, and thus being able to benefit from advantages of both of
them. This is the starting point of the developments we will present in the present
chapter. Indeed, the idea of seeing the cytoskeleton as a discrete 2D structure made of
97
Towards a RBC model
a large number of connected springs is very attractive. The models developed on these
bases have shown that the properties of the coarse grained model of the cytoskeleton can
be linked to the underlying reality of the biological structure, which is very satisfying.
Of course, when the coarse graining reaches the level needed to tackle the fluid structure
interaction problems we are interested in, the obtained model of the cytoskeleton can no
longer be reasonable compared to the real cytoskeleton structure. However, it seems that
the right mechanical behaviour can be obtained, if the mechanical properties are fixed
taking into account the coarse graining process.
In the literature, all the models using this kind of cytoskeleton modelling use also a
particle based approach to describe the surrounding fluid flows (Pivkin & Karniadakis,
2008; Peng et al., 2011). So we want to test if such a modelling could be coupled to a
continuum description of the lipid membrane. The idea is to use our BEM vesicle model
and add a cytoskeleton inspired by the coarse graining approach. At this stage, our
goal is to verify what can be obtained by mixing in this fashion the two approaches and
determine the limitations.
We have already stated in the previous chapter that the understanding of vesicles
behaviour in confined capillary flows might lead to a better knowledge of red blood cells
in human capillaries since they both share some similar mechanical behaviours, especially
when capillary size is comparable to cell diameter. However some differences in their
behaviours are due to the shear elasticity of RBCs plasma membrane. The membrane
of a red blood cell is submitted, as for vesicles, to the constraint of local inextensibility,
but, in addition, also to the elastic restoring force arising from the deformation of the
cytoskeleton, that vesicles lack. We highlight here that in three dimensions, these two
elements can coexist and both influence the dynamics, while in dimension two the effect
of the cytoskeleton, i.e. membrane elasticity, is suppressed by the inextensibility of the
membrane, that fixes the distance between neighbouring membrane patches.
In Coupier et al. (2008) authors experimentally and numerically studied the noninertial migration of vesicles in bounded Poiseuille flows. They reported that the movement toward the centre of the channel is induced by the combined effects of the walls and
of the curvature of the velocity profile.
Pozrikidis (2005b) studied the motion of spherical, oblate ellipsoidal, and biconcave
capsules in tube flow by using the boundary element method and observed that spherical
capsules slowly migrate to the tube centreline, and oblate and biconcave capsules develop
parachute and slipperylike shapes, respectively.
Noguchi and Gompper Noguchi & Gompper (2005b) have studied the shape transition
of vesicles and RBCs in capillary flows by employing a three-dimensional mesoscopic
simulation method and obtained the slipper-like shape of a RBC. In McWhirter et al.
(2011) the same authors have studied the transition from a discocyte to a parachute shape
of elastic vesicles and their clustering behaviour in micro-capillary flows. They found
that the discocyte-to-parachute transition reduces the flow resistance and hydrodynamic
interactions coupled with RBC deformations induce clustering in the regime of higher flow
velocities, where parachute shapes prevail. The same discocyte-to-parachute transition
had already been observed in Pivkin & Karniadakis (2008) using a coarse-grained model
in DPD flow simulations of RBCs in a microchannel. Starting from the common discocyte
98
Towards a RBC model
shape at rest, the particle assumes a parachute type shape when the flow is activated and
finally recovers again its equilibrium biconcave shape as the flow is turned off.
In Fedosov et al. (2011) authors have characterised the transition from biconcave to
parachute-like shape in confined Poiseuille flow for infected RBCs by a Plasmodium parasite in malaria, using a multiscale RBC model based on the dissipative particle dynamics
method. They evidenced a nearly linear dependence of the transition on the shear modulus µ0 .
More recently, the inertial migration of an elastic capsule Shin & Sung (2011) and a
single red blood cell Shi et al. (2012) in a two-dimensional bounded Poiseuille flow at a
finite Reynolds number was investigated by Shin using immersed boundary method. Two
motions of oscillation and vacillating breathing (swing) of a RBC are observed in both
narrow and wide channels. The continuation of shape change from the slippery to the
parachute by varying the value of the flow strength is obtained for the biconcave shape
cell in a narrower channel.
Figure 5.2: Final discoidal shape of a simulated three-dimensional vesicle with v = 0.6
(typical value for RBCs). The triangular mesh is composed by N = 2562 nodes and
M = 5120 triangular elements.
In this chapter we present a three-dimensional RBC membrane model that takes into
account the bending energy, in-plane shear energy, and constraints of fixed surface area
and fixed enclosed volume. Starting from the BEM formulation described in 2.2, the RBC
membrane is modelled as a composite network, which consists of a dynamically triangulated surface as in the case of fluid vesicles. The membrane is coupled to an additional
network of harmonic springs with fixed connectivity, that represents the presence of the
cytoskeleton. Connected springs are simulated by the edges of mesh triangular elements
and represent the structural network of proteins located on the inner surface of the lipid
bilayer, the cytoskeleton. Unlike the coarse-grained models Li et al. (2005); Discher et al.
(1998), in our model we explicitly compute the interaction between the bilayer and the
skeleton. The interaction between the membrane and the cytoskeleton is simulated by
considering normal contact and lateral slide. We consider this interaction as a contact in
the normal direction respect to the lipid bilayer and a viscous friction in the tangential
99
Towards a RBC model
direction. Different local deformations are admitted for the membrane and the cytoskeleton, although the overall surface area is locally conserved. Our model is a first attempt
to couple our three-dimensional continuous scale model 2.2 with a discrete description of
the cytoskeleton. It can be interesting to observe the effect of the anisotropy introduced
by the presence of the cytoskeleton on the constraint of local surface incompressibility.
The first issue we want to address is to know if a more complex description is necessary in
order to characterize the RBCs deformation under external forces. On the other hand, if
numerical results are in good agreement with available experimental data, we can study
the influence of the cytoskeleton on the equilibrium shape of a RBC, both in free space
fluid flows and in bounded Poiseuille flows, in order to complete our study on confined
configurations submitted to bounded flows.
This chapter is organized as follow. In the next section we present the model membrane
structure for RBCs and numerical methods, with a special attention to the equilibrium
position. Next we present our time advancing scheme, taking into account the interaction
between the RBC membrane and the cytoskeleton.
In Sec. 5.3, we first provide simulation results on sedimentation of an initially prolate
shape in an infinite fluid for increasing values of network connecting forces as a benchmarking test. In this way we can study the influence of the cytoskeleton on the equilibrium
shape of a RBC for a relatively simple case.
The mechanical responses of the cell during loading and upon release of the optical
force are then analysed in sec. 5.3.2 to extract the elastic properties of the cell membrane.
We will measure the deformation of an initially discoidal RBC under the effect of a sharp
force applied on the opposite edges of the particle. Although obtained shapes are not
very accurate, the general behaviour is in agreement with experimental results.
Finally, in sec. 5.3.3, we present the motion and the deformation of a single RBC
in bounded Poiseuille flows and describe the factors affecting the deformation of a single
RBC in Poiseuille flows. We stress our attention on how does the presence of the cytoskeleton affect the final deformation of a cell under the action of a bounded Poiseuille
flow, comparing the final shape of a RBC and a vesicle with the same control parameters.
Contrary to the previous case, final shapes of RBCs under the effect of a bounded flow
are more accurate, since this time applied forces are well-distributed along all the particle
surface.
For simulations a three-dimensional mesh of about M = 1280 triangular elements is
typically used, as shown in Fig. 5.2. This configuration is used as reference shape, that
is the stress-free state, during the evolution of the particle and it defines the equilibrium
position of the nodes and the equilibrium length of the spring which simulate the spectrin
network of cytoskeletal proteins. Even if, as previously stated, there is no universal
consensus on the reference shape that should be adopted in order to well describe the real
deformation of a RBC under external solicitations, the determination of the real stressfree shape of the cytoskeleton goes well beyond the scope of the present work. Since in
most analytical and numerical studies on RBCs the biconcave shape is assumed to be the
reference one (Pozrikidis, 2005a; Fedosov et al., 2010b,a; Li et al., 2013), in our model we
follow this assumption.
100
Towards a RBC model
5.2
Cytoskeleton model
The model membrane structure is analogous to the models presented in Noguchi & Gompper
(2005b); Pivkin & Karniadakis (2008); Fedosov et al. (2010b,a). The membrane model
consists of a collection of points {xn , n ∈ 1 . . . N } which are the vertices of the RBC
surface triangulation. The length of the link i ∈ 1 . . . S connecting vertices m and n is
Li = |xm − xn | ≡ lmn .
5.2.1
Nodal forces induced by the cytoskeleton
The spring network induces on each node n of the mesh a resulting force given by
f~n =
X
f~np
(5.1)
p
where p are all the vertices connected to the vertex n by an element vertex (or spring
np). If Knp represents the general stiffness of the spring np, connecting the node n at the
position ~xn to the node p at the position ~xp , the force exerted by the node p on the node
n simply writes:
f~np = −Knp (~xp − ~xn )
(5.2)
We can split Eq. 5.1 into two contributions
f~n =
X
p
f~np = −
or, for each component
fin = −
5.2.2
X
X
Knp~xp +
Knp ~xn
(5.3)
p
p
Knp xpi +
X
X
Knp xni
(5.4)
p
p
Cytoskeleton elastic energy
At this point we have only used the usual expression of the force exerted by an elastic
spring, thus the coefficients Knp are very general. In the case of linear springs, if knp
represents the stiffness of the spring np, connecting the node n to the node p, and lnp its
length, the force exerted by the node p on the node n simply writes:
f~np = −knp
0
0 )
(lnp − lnp
lnp
(~xp − ~xn ) = −knp (1 −
)(~xp − ~xn )
lnp
lnp
(5.5)
0 the spring length at rest, so the expression for the coefficients K
with lnp
np reads
Knp
0
lnp
)
= knp (1 −
lnp
(5.6)
In order to go on for more general situations, we need now to choose a constitutive
law for the springs. So let us introduce the elastic energy of the cytoskeleton
Ucyto =
1 XX
Unp
2 n p
(5.7)
101
Towards a RBC model
where Unp is the elastic energy of the spring np. The spring force fnp defined in Eq. 5.2
is related to the elastic energy by:
δUnp
f~np = −
= −Knp (~xp − ~xn )
δ~xn
(5.8)
We remind that the RBC cytoskeleton is a network of fibres composed of proteins
contained within a cell’s cytoplasm. These proteins consist of linear polymers, such as
microfilaments and microtubules. In studying dilute polymeric solutions, the polymer
molecules are often modelled as dumbbells consisting of two beads connected by a spring.
The beads represent molecular segments of several monomers and the spring describe the
entropic effects to which the end-to-end vector of the polymer is subject. In the simplest
model, the elastic force between the beads may be taken to be proportional to the separation between the beads. The beads experience also a randomly fluctuating force due
to the thermal agitation by the surrounding solvent molecules. Due to its simplicity, this
model has some serious drawbacks, the most important being the fact that the dumbbells
can be stretched infinitely. It is possible to overcome this problems by limiting the dumbbell extension to a maximum value. An important example of such a non-linear spring
is the finitely extensible non-linear elastic (FENE) spring (Warner, 1972). This model
is quite largely used for modelling interactions in the RBC cytoskeleton (Fedosov et al.,
2010b). Although it is often replaced by a more complex attractive wormlike chain (WLC)
potential (Li et al., 2005; Pivkin & Karniadakis, 2008; Peng et al., 2010; Fedosov et al.,
2010a), the choice of the potential seems to greatly affect the RBC non linear response
only for very large deformations (Fedosov et al., 2010b). Indeed, it was shown that a simple harmonic spring model, even if it does not capture the non-linear RBC deformations,
is able to give an adequate response at small deformations (Noguchi & Gompper, 2005b).
We now want to highlight a FENE model for RBCs, whose attractive potential is
given by:
ka max 2
F EN E
) log(1 − x2np )
(5.9)
Unp
= + (lnp
2
max ∈ (0, 1) , lmax is the maximum spring extension, k is the FENE
where xnp = lnp /lnp
a
np
spring constant. Since this network of springs exerts purely attractive forces, producing a
triangular area compression, we need to add a repulsive potential. We choose a potential
defined as a power function of the separation distance
REP
Unp
=+
kr
α−1
(α − 1)lnp
(5.10)
where kr is the repulsive coefficient and α is the repulsive exponent.
The final expression for the potential is thus
T OT
Unp
ka max 2
kr
(lnp ) log(1 − x2np ) +
α−1
2
(α − 1)lnp
Kr
Ka
log(1 − x2np ) +
= +
2
(α − 1)xα−1
np
= +
(5.11)
max )2 , K = k /(lmax )α−1 . The potential 5.11 defines a spring with
where Ka = ka (lnp
r
r
np
non-zero equilibrium length.
102
Towards a RBC model
The final expression for the total dimensionless spring coefficient is finally:
Knp =
5.2.3
1
max )2
(lnp
Ka
Kr
−
1 − x2np xα+1
np
!
(5.12)
Equilibrium position
The combination of the FENE attractive and power repulsive force defines a spring with
0 given by
non-zero equilibrium length lnp
f~np = 0
(5.13)
For each spring Eq. 5.13 defines thus the length of the spring in the reference shape,
that is the discoidal one. Combining Eq. 5.13 with Eq. 5.8 and 5.12 , we obtain the
relation:
1 − x2
(5.14)
Ka = Kr α+10
x0
0 /lmax .
where x0 = lnp
np
5.2.4
Connection with the shear modulus of a RBC
The shear deformation is area-preserving, so only spring forces contribute to the membrane shear modulus µ0 . Starting from an equally triangulated surface, we can use the
linear analysis of Dao et al. (2006) to obtain the expression of the in-plane stress τ for
the area elements. The membrane shear modulus can be obtained by the first derivative
of the shear stress with respect to a small shear strain. The explicit expression, already
derived in Fedosov et al. (2010b), for the shear modulus of the cell membrane, which is
envisioned as comprising a triangulated network of FENE spectrin molecules, is
µ0 =
=
√
3
4
√
3
2ka x20
kr (α + 1)
+ α+1 α+1
(1 − x20 )2
x0 lmax
!
2Ka x20
Kr (α + 1)
+
2
2
(1 − x0 )
xα+1
0
2
4lmax
!
(5.15)
Using Eq. 5.14 we get:
4
kr = √
3
and
˜lα+1 xα+1
max 0
2x2
0
+α+
1−x20
4
ka = √ 3
1−
2x20
1−x20
R0α+1 µ0
1
x20
µ0
+α+1
(5.16)
(5.17)
103
Towards a RBC model
where R0 is the typical size of the cell. The final expression for the force is therefore:
f~np = Ktot (~xp − ~xn ) =
=
4
ka
kr
− α+1 α+1
2
1 − xnp xnp lmax
√ 2x2
3 1−x02 + α + 1
0
5.2.5
1 − x20
xα+1
0
−
1 − x2np xα+1
np
!
!
(xp − xn )
µ0 (xp − xn )
(5.18)
Coupling to the lipid membrane
As already stated, our model explicitly incorporates the local interactions between the
skeleton and the bilayer. The membrane skeleton is connected to the lipid bilayer at
pinning points that coincide with the mesh nodes of the cell surface triangulation. There
are several strategies to take into account these interactions but they will all add new
contributions to the matricial expression 2.12 of the nodal velocities.
Finally they will change the way the membrane position is updated in time:
..
n .
x (t + dt)
i
..
.
..
n.
= x (t)
i
..
.
..
n.
+ dt R u (t)
i
..
.
(5.19)
where the matrix R determines the membrane position at the time t + dt. Depending on
the matrix R the actualisation of the position takes into account different components of
the computed velocity. We will see in the following sections some example cases for the
choice of the matrix R.
Example 1
If R is the identity matrix the actualisation of the interface position takes into account
the whole velocity field:
R = Id
(5.20)
Under this condition the expression for the velocity reads simply:
..
n.
u (t)
i
..
.
..
.
= 1 xn (t + dt) − xn (t)
i
dt i
..
.
(5.21)
and no slip motion between the lipid membrane and the cytoskeleton is allowed. This is
the case of a capsule.
Example 2
When modelling a vesicle, during the evolution of the shape of the interface, the mesh
may suffer from severe distortions and become unsuitable for an accurate representation
of the problem. This is firstly due to the fact that the evolution of a curved surface
104
Towards a RBC model
leads to nodes accumulations in some areas of the interface, leaving other sectors not well
described. On the other hand, the fluid nature of the membrane implies that there may
be purely tangential velocity fields that do not change the general shape. However they
will lead to a degradation of the mesh nodes if the movement coincides with the velocity
of the membrane. In order to avoid this problem, in the vesicle model proposed in chapter
2, we use only the normal component of the velocity for the actualisation of the membrane
position. The fluid character of the membrane is intrinsic due to the correct treatment
of the surface incompressibility constraint: tangential node motion is decoupled from the
flows of lipids along the membrane. Thus, no change of mesh connectivity is needed to
ensure fluidity of the membrane. In order to update the interface position using only the
normal component of velocity field, the matrix R must be defined as:
R = Πn ≡ ~n ⊗ ~n where
Rij = ni nj
(5.22)
and the subsequent expression for the velocity is thus:
..
n.
u (t)
i
..
.
and
..
.
1
xn (t + dt) − xn (t)
i
dt i
..
.
..
.
= 1 Π −1 xn (t + dt) − xn (t)
i
dt n i
..
.
..
.
= Πn P (u∞ )n + GF (x) xn (t + dt)
i
i
..
..
.
.
..
.
(5.23)
(5.24)
Example 3
When modelling a RBC, one has to consider a viscous friction between the cytoskeleton
and the lipid bilayer. The deformation of the cytoskeleton, represented by a network
coinciding with the surface mesh, induces two kind of forces:
• The normal component is directly transmitted to the bilayer since the cytoskeleton
is forced to follow the bilayer displacement. Finally the normal component must
equilibrate all the fluid-structure forces.
• The tangential component is transmitted by a viscous friction since in the tangential
direction the cytoskeleton is able to slip on the bilayer. Finally the tangential
component must equilibrate the viscous friction.
In other words, we consider the effective bilayer–cytoskeletal interaction as a normal
elastic spring along with a tangential friction force. In the numerical model the matrix
expression of the elastic force is
..
.
..
.
(f el )n = F c (x) xn (t + dt)
i
i
..
..
.
.
(5.25)
105
Towards a RBC model
where the matricial operator F c acting on the vector containing the nodal values of
positions resumes the effect of elastic forces 5.4. On the other hand, the viscous friction
force is given by
.
..
..
..
.
.
(f visc )n = cf un − (uc )n
(5.26)
i
i
i
..
..
..
.
.
.
where cf is the viscous friction coefficient and uc is the cytoskeleton velocity, which
coincides with the mesh velocity but not to the bulk fluid and to the lipid membrane
velocity u.
Thus, in the numerical model the viscous friction force is computed as
..
.
(f visc )n
i
..
.
.
.
.n
= cf u
i
..
cf n.
+
dt xi (t)
..
..
.
.
..
cf n .
−
dt xi (t + dt)
..
.
The tangential equilibrium between the two forces is given by:
..
.
..
.
visc )n = 0
el n
Πt
i
(f )i + (f
..
..
.
.
(5.27)
(5.28)
where Πt ≡ [1 − ~n ⊗ ~n] is the projector on the tangent plane. Thus the expression for the
velocity reads
..
n.
u (t)
i
..
.
..
.
= 1 xn (t + dt) − xn (t)
i
dt i
..
.
..
.
1
n
x (t + dt) − xni (t)
=
dt i
..
.
..
.
− 1 Πt (f el )n
i
c
f
..
.
..
.
− 1 Πt F c xn (t + dt)
i
c
f
..
.
(5.29)
In the limit case of cf → ∞ we find the Lagrangian formulation typical of capsules
dynamics (example 1), while the case cf → 0 is the Eulerian formulation commonly used
to model vesicles (example 2).
The algebraic system to solve is finally:
..
.
h
i
= P (u∞ )n + G F b + F c (x) xn (t + dt)
i
i
..
..
.
.
..
..
..
.
.
.
1
1
c n
n
n
uni (t)
= dt xi (t + dt) − xi (t) − c Πt F xi (t + dt)
f
..
..
..
.
.
.
..
n.
u (t)
i
..
.
106
..
.
(5.30)
Towards a RBC model
and the subsequent non-linear system is thus:
..
.
dt
n (t + dt)
1 − dt P G F b (x) + F c (x) − Πt F c (x)
x
i
cf
..
.
(
h
)
i
..
n.
=
xi (t)
..
.
..
.
+ dt P (u∞ )n
i
..
.
(5.31)
Tangentially, the two layers are allowed to slide viscously against each other. The
contact stress depends upon the velocity difference between the mesh nodes and the lipid
surface. An original method for the lateral relaxation has been developed, based on the
energy minimization: at each time step the position of the cytoskeleton nodes is moved in
the tangent direction in order to minimize the total stored energy. The tangent relaxation
taking into account the viscous friction let us simulate with higher reliability the particle
dynamics. Another significant advantage of this viscous friction scheme is that it improves
the stability of the algorithm: the sharper deformations which may lead to degeneration
of the particle shape are properly amortized by the energy minimization algorithm.
5.3
5.3.1
Results and discussion
Sedimentation
As first example in free space flow, it’s interesting to see the influence that a cytoskeleton
can have on the shape of a sedimenting vesicle. We thus study the sedimentation of an
initially prolate shape of fixed reduced volume v and density contrast ∆ρ leading to a
Bond number B0 . We study the influence of the network connecting forces on the final
shape, in order to better characterize our model for the simple case of the gravity induced
sedimentation of a particle. If we neglect the cytoskeleton action, the corresponding final
shape is the same as the vesicle one having the same deflation and Bond number. We
compare the deformation of the final shape for increasing network connecting forces. We
define µ0 = c µ̄0 , choosing µ̄0 = 5 µN/m as a reference value for the shear stress of RBC
cytoskeleton, and then we let µ0 vary through the coefficient c. We start to investigate
final shapes of a RBC starting from a prolate ellipsoid, selected also as reference shape.
We performs several simulations for different values of µ0 . We attend that for high values
of µ0 the membrane does not deform because the cytoskeleton elastic force is too high
and the the final shape will be the reference one. For low values of µ0 the dynamic will
be similar to the the vesicle one and the final shape will be close to the shape of a vesicle
with same values of v and B0 .
Fig. 5.4 shows the comparison between stationary shapes obtained by imposing increasing values of µ0 in the case of the sedimentation of an initially prolate shape with
v = 0.9 and B0 = 40. For µ0 = 0 the final shape is the classical pear-like shape already
observed for vesicles starting from a prolate profile Boedec et al. (2011b). On the other
107
Towards a RBC model
Figure 5.3: Three-dimensional mesh of the equilibrium shape for the sedimentation of an
initially prolate shape with v = 0.9 and B0 = 220 for µ0 = 0.1. The legend represents the
intensity of the surface divergence of the velocity on each element.
side for µ0 = 10 network connecting forces are too strong and the profile can not deform
from the initial shape.
We perform the same experiment with an higher value of the Bond number B0 , in
order to study the influence of the network connecting forces for highly deformed shape.
Previous works Boedec et al. (2013) , indeed, show the emergence of long finger-like shapes
for vesicles subjected to gravity. The goal of this test is to check whether the presence of
a cytoskeleton, even for low values of shear modulus µ0 , prevents the finger to appear or
not. Fig. 5.4 shows results for a profile with the same deflation of the previous one but
an higher value of the Bond number, B0 = 220. As expected, increasing µ0 the profile
becomes closer to the reference one. Even for very low values of µ0 (µ0 = 0.1) the finger
disappears and the final shape is the trivial pear-like shape. Fig. 5.3 show the 3D shape
of the settling RBC for µ0 = 0.1: no irregularities in the mesh are present and triangles
are smooth even in the most deformed regions. Also in this case for µ0 = 10 network
connecting forces are too strong to let the nodes move from each other and the profile can
not deform from the initial shape. From this experience we deduce that the emergence
of long finger-like shapes can be observed only for vesicle sedimentation since in the case
of RBCs, even for large values of B0 , the cytoskeleton prevents the finger to appear. A
deeper analysis on cytoskeleton forces shows us that hydrodynamical solicitations typical
of sedimentation dynamics are too weak to highlight the non-linear nature of the FENE
model. Indeed, even for low values of µ0 , induced mesh deformations are not strong enough
to let the springs stretch significantly with respect to the maximum allowed length and
no considerable differences can be observed compared to a linear model.
108
Towards a RBC model
2
2
c=10
c=1
c=0
c=10
c=1
c=0.1
c=0
1.5
1.5
1
1
0.5
0.5
z
z
0
-0.5
0
-1
-0.5
-1.5
-1
-2
-1.5
-2.5
-1
-0.8 -0.6 -0.4 -0.2
0
x
0.2
0.4
0.6
0.8
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
x
Figure 5.4: Left: Sedimentation of an initially prolate shape with v = 0.9 and B0 = 40
for several values of µ0 . Right: Sedimentation with B0 = 220. In the case of a vesicle
(c = 0) there is a finger that disappears if we increase the value of c. For high values of
the shear modulus (c > 10) the final shape is the same as the reference one.
5.3.2
Optical Tweezers
Next, we perform RBC stretching simulations and compare the results with the experimental data of RBC deformation by optical tweezers Suresh et al. (2005). Previous works
have proved that the absence of the cytosol affects only slightly the axial and transverse
diameters of the cell at different force levels Dao et al. (2003). In the following we consider
a RBC characterized by a reduced volume v = 0.6 and an average diameter of D0 = 7.82
µm. The reference shape is chosen to be a biconcave shape, described by Evans & Skalak
(1980):
s
"
4(x2 + y 2 )
(x2 + y 2 )2
x2 + y 2
+
c
a
+
b
z = ±D 1 −
D2
D2
D4
#
(5.32)
where D = 7.82 µm is the cell diameter, a = 0.0518 , b = 2.0026 and c = −4.491. The
area and the volume of the corresponding RBC are respectively 135 µm2 and 94 µm3 .
The RBC membrane network is composed by Nv vertices, which define the level of
membrane representation from the spectrin-level to the coarse-grained network of Nv =
642. The total stretching force Fs is applied to N− and N+ vertices, with N− = N+ =
109
Towards a RBC model
εNv , along the negative and positive direction, respectively. These vertices cover a nearspherical area on the surface with ε ≈ 0.02 which is in agreement with the contact area of
the attached silica bead with diameter dc ≈ 2µm used in experiments. The axial diameter
DA is computed as |xmax − xmin |, where xmax is the maximum x position among the N+
vertices and xmin q
is the minimum among N− . The transverse diameter DT is calculated
as 2 × max i=1...Nv (yi − cy )2 + (zi − cz )2 , where cy and cz are the y and z centre of mass
coordinates. Fig. 5.5 shows that for stronger stretching forces Fs the axial diameter
increases and the transverse one decreases from the initial value D0 .
Figure 5.5: Stretching response of the present RBC model for different network intensity
compared to experiments of Suresh et al. (2005).
The elastic shear modulus µ0 measured experimentally lies between 4 and 12 µN/m
and the bending modulus EB lies between 1 × 10−19 and 7 × 10−19 J, which correspond
to 25 − 171 KB T under normal conditions. By comparing simulations results with the
experimental data of RBC deformation by optical tweezers Suresh et al. (2005) we find a
good agreement by choosing µ0 = 5 µN/m.
However, it must be noticed that our model is not very robust under the effect of
sharp solicitations, because the consequently deformation of mesh connections simulating
the spectrin network induces forces that are too strong compared to common hydrodynamical forces, even for low values of the stretching force. This problem can be clearly
observed in Fig. 5.6, showing the three-dimensional deformed mesh of a RBC submitted
to a stretching force of Fs = 20 pN. Even though the model yields correct mechanical
deformation results, it does not provide an accurate or smooth RBC shape description,
which can be of importance in RBC dynamics. This obstacle precludes the possibility
of further increasing the loading force. A possible solution to this problem can be the
110
Towards a RBC model
Figure 5.6: Three-dimensional mesh of the equilibrium shape for an initially discoidal
shape of RBC under the effect optical tweezers for µ0 = 1. The legend represent the
intensity of the surface divergence of the velocity on each element.
implementation of a more efficient relaxation algorithm or the use of more refined meshes.
5.3.3
Flow of a single RBC in a capillary
The capillaries are the smallest blood vessels in the circulatory system, with a typical
diameter ranging from 4 to 10 µm. These are the terminal branches of the arterial and
venous vascular trees, and the principal sites of oxygen exchange with tissues. RBC
typical diameter is about 8 µm, so they must undergo large deformation in order to enter
the smallest capillaries.
In the previous chapter we have focused our attention on deformations of vesicles
confined in narrow capillaries under the effect of a Poiseuille flow. We have seen that
vesicles represent a good simplified model for studying deformations of confined RBCs,
especially when capillary size is comparable to cell diameter. On the other hand we
have observed in section 5.3.1 that for settling particles the presence of the cytoskeleton
prevent large deformations, like the tether formation, that are observed for vesicles. It
is thus interesting to study how these two factors, the confinement and the presence of
the cytoskeleton, combine together for particles having the same deflation of a RBC. In
the present section, the issue under scrutiny is therefore the more complex dynamics of a
single RBC in bounded three-dimensional Poiseuille flows.
As already done in section 5.3.1 in the case of sedimentation in unbounded flows, we
analyse the differences between the final shape of a vesicle and a RBC for an increasing
strength of network connections. Fig. 5.7 shows the equilibrium shape of a vesicle having
the same deflation of a RBC submitted to a Poiseuille flow inside a capillary. The final
shape is a non-axisymmetric parachute. We recall that for vesicles the fluid character of
the membrane allows us to decouple the tangential node motion from the flows of lipids
111
Towards a RBC model
Figure 5.7: Three-dimensional shape of a vesicle having the same typical deflation of a
RBC in a capillary with β = 0.3 and Ca = 10.
along the membrane. The criterion based on the local curvature imposes a bigger amount
of nodes to describe the portions of the surface where the mean curvature is higher,
leading to an improvement of the mesh quality in these parts. This is no longer valid
for RBCs, where the presence of the cytoskeleton fixes a reference value for the relative
position between each node. When the effect of a cytoskeleton is considered, even for a
very weak membrane shear modulus, high deformations typical of the parachute shape
are suppressed and the asymmetry of the cell becomes less significant. The same result
is found taking several values of confinement (β = 0.33 and β = 0.5 in Fig. 5.8). As the
cytoskeleton strength is further increased the cell recovers the discocyte shape typical of
RBCs at rest. That means that hydrodynamical forces are not strong enough to oppose
to cytoskeletal forces in order to allow shape deformations.
It is important to remind that the choice of the reference shape assume an increasing importance on the final shape for high values of µ0 . Thus, in future investigations
it would be interesting to extend the study considering different reference shapes. Another remark concerns the accuracy of the final shape. For µ0 = µ̄0 = 5 µN/m the final
three-dimensional mesh shows local anomalous surface features (hills) in equilibrium (Fig.
5.9 bottom). This feature has been also observed for RBC in free space in other works
Fedosov et al. (2010b) and it seems to be less pronounced for higher refinements of the
3D mesh. In order to obtain a reliable description of the RBC shape and of the dynamics
in the capillary further developments on the numerical model must be implemented. In
particular, a more performing algorithm for the computation of the cytoskeleton interactions and for the energy minimization is necessary in order to perform simulations with
higher refined meshes and thus be able to account for larger cell deformations typical of
confined RBCs in narrow capillaries. The interest in describing highly deformed shapes
resides also in the possibility to study the behaviour of the cytoskeleton network when
the springs composing the mesh are deeply stretched and thus highlight the non-linear
nature of the FENE model, that is not noticeable for weak spring extensions.
112
z
Towards a RBC model
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
c=0
c=0.1
c=1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x
2
c=0
c=0.1
c=1
1.5
z
1
0.5
0
-0.5
-1
-2
-1.5
-1
-0.5
0
x
0.5
1
1.5
2
Figure 5.8: Cross section of RBC final shapes in a capillary for increasing values of the
membrane shear modulus. The confinement is β = 0.33 for the figure on the top and
β = 0.5 on the bottom. In both cases Ca = 10. Filled circles and open ones represent
the cross section on the xz and yz plane respectively.
113
Towards a RBC model
Figure 5.9: Three-dimensional mesh of a RBC in a in a capillary with β = 0.5 and
Ca = 10, characterised by a membrane shear modulus µ = 0 µN/m (top), µ = 0.5 µN/m
(centre) and µ = µ̄0 = 5 µN/m (bottom).
114
Towards a RBC model
5.4
Summary
Among all types of cells, RBC possesses one of the simplest and best characterized molecular architectures. The human red blood cell has a biconcave shape, an average diameter
of about 8 µm and a thickness of about 2 µm as its rest shape. Without a nucleus, a RBC
contains a cytosol enclosed within a highly flexible yet surprisingly strong membrane,
consisting of a lipid bilayer supported from inside by a spectrin network of cytoskeletal
proteins. In this chapter we have presented a three-dimensional RBC membrane model
that takes into account the bending energy, in-plane shear energy, and constraints of fixed
surface area and fixed enclosed volume. Starting from the BEM formulation described in
2.2, the RBC membrane is modelled as a composite network, which consists of a dynamically triangulated surface as in the case of fluid vesicles. The membrane is coupled to an
additional network of harmonic springs with fixed connectivity, that represents the presence of the cytoskeleton. We have explicitly computed the interaction between the bilayer
and the skeleton, by considering normal contact and lateral slide. We have modelled this
interaction as a spring contact in the normal direction respect to the lipid bilayer and a
viscous friction in the tangential direction.
In section 5.2 we have first presented the model membrane structure for RBCs and numerical methods, then we have described the time advancing scheme, taking into account
the interaction between the RBC membrane and the cytoskeleton.
We have then studied in section 5.3 the influence of the cytoskeleton on the equilibrium shape of a RBC, both in free space fluid flows and in bounded Poiseuille flows,
in order to complete our study on confined configurations submitted to bounded flows.
The mechanical responses of the cell during loading and upon release of the optical force
are then analysed in sec. 5.3.2 to extract the elastic properties of the cell membrane.
Although obtained shapes are not very accurate, the general behaviour is in agreement
with experimental results. A special attention has been devoted to the motion and the
deformation of a single RBC in bounded Poiseuille flows, in order to analyse the factors
affecting the deformation of a single RBC in Poiseuille flows.
115
Chapter 6
Conclusions and perspectives
Dissolved in water, the phospholipid self assembles to form various structures in which
the hydrophilic heads are in contact with water and the hydrophobic tails are protected.
In particular, a possible structure is bilayer, that is to say where the phospholipid self
assembles "head to tail" to thereby form a thin interface separating two aqueous media.
The properties of this interface are original, since it behaves as a two-dimensional curved
incompressible fluid, but also as a solid, presenting a bending resistance. Vesicles represent
also an interesting simplified model for red blood cells, since they also share some similar
mechanical behaviours.
In this thesis an analysis of different dynamical and rheological behaviours of a vesicle
by means of three-dimensional and three-dimensional axisymmetric numerical simulations
is presented. The main contributions concern the dynamics of a single vesicle sedimenting
towards an horizontal plane wall (chapter 3) and a vesicle flowing in a cylindrical channel
(chapter 4). The axisymmetric extension let us perform calculations that would be too
expensive in 3D, because, in order to model the 3D behaviour in the vicinity of the
capillary wall, the number of triangular elements should be highly increased and the
computational cost would become too high.
In order to investigate the gravity-driven sedimentation of vesicles towards a flat surface perpendicular to the axis of gravity the kernel of the Green’s function must take into
account the semi-infinite geometry of the problem. For this purpose the Green’s function
has been decomposed into the free-space Green’s function (the Stokeslet), a collection of
image singularities with poles outside the domain of flow, and a regular complementary
component that is required to satisfy proper boundary conditions on the solid surface. At
the numerical level this extension does not introduce new singularities in the kernel compared to the free space case. Next a short range repulsive potential has been introduced to
take into account electrostatic interactions between the vesicle membrane and the surface.
The numerical model has been validated and compared to experimental results, leading
to a good agreement in a variety of situations.
Since the capillary flow is the archetype of most practical situations in natural living
systems, where all kinds of cells are transported in the body vessels, we have focused our
attention on this configuration. We have thus presented a study on the the dynamics of
vesicles in confined Poiseuille flow, with a particular attention to equilibrium shapes, both
117
Conclusions and perspectives
for three-dimensional configurations and for axisymmetric regimes. Two methods have
been introduced to compute the flow confined in a capillary: either the use of a Green’s
function that takes into account the confinement action of the channel wall, or the use
of the free space Green’s function combined with the mesh of the wall. The first method
uses the axisymmetric Green’s function in a bounded domain, which is the sum of a free
space contribution and a correction taking into account the the confinement action of the
wall. The principles of computation have been described in a generic way and an original
method to solve main difficulties in numerical integration has been presented. While the
analytical approach can be used only for the axisymmetric model since in the 3D case it
would be too hard and not enough accurate, the second one can be applied both to the
three-dimensional and the axisymmetric model. After a first validation by comparison of
three-dimensional and axisymmetric equilibrium shapes for axisymmetric regimes we have
provided a comparison with experimental results for vesicles shapes in narrow capillaries,
obtaining satisfying results. Axisymmetric simulations have shown their strength offering
an efficient method to understand the fundamental physical behaviour behind the bulletparachute shape transition.
A more exhaustive analysis of this subject is needed. Further research in this area may
include the development of a more general formulation taking into account the viscosity
contrast between the outer and the inner fluid, in order to study the vesicle dynamics for
different viscosity regimes. Moreover it would be interesting to perform a systematic investigation on three-dimensional confined vesicles to well characterise the slipper-parachute
transition for a wide range of confinement. This study would necessitate further implementations and optimisations of the three-dimensional model, that are already in progress
at the moment.
Finally, the description of a new approach for simulating RBCs behaviour in a fluid,
based on the coupling between a continuum description of the lipid membrane and a
discrete representation of the cytoskeleton, is proposed. This model is thus used to study
the factors affecting the deformation of a single RBC in a fluid and the influence of the
cytoskeleton on the equilibrium shape. As first example in free space flow, we have studied
the gravity-driven sedimentation of initially prolate shapes. Results are quite good, since
obtained meshes do not present huge irregularities and the final shape evolves from the
typical vesicle shape to the reference one for increasing values of the membrane shear
modulus. The situation is no longer the same when a sharp force is applied, as in the
case of optical tweezers, or when the final shape presents important deformations for
weak values of network connections, as for confined cells in narrow capillaries. Even if
the global behaviour is in good agreement with expected results, final shapes show local
buckling in the surface mesh. In order to solve this problem higher refinements of the 3D
mesh should be used in the future. A more performing algorithm for the computation
of the cytoskeleton interactions and for the energy minimization is thus necessary. In
future investigations it would be also interesting to extend the study considering different
reference shapes, in order to highlight the dependence of the equilibrium shape on the
reference one for different flow configurations.
118
Appendix A
The discontinuity of the
double-layer potential for Stokes
flow
We want to demonstrate that the double-layer potential
IjDL (x0 )
=
Z Z
D
ui (x)Tijk (x, x0 )nk (x)dS(x)
(A.1)
has the following behaviour
lim IjDL (x0 )
x0 →D +
= 4πuj (x0 )
or equivalently
Z Z
lim − IjDL (x0 ) = −4πuj (x0 )
x0 →D
PV
D
Z Z
ui (x)Tijk (x, x0 )nk (x)dS(x)
PV
D
ui (x)Tijk (x, x0 )nk (x)dS(x)
(A.2)
(A.3)
We denote by D + the side of D which faces in the fluid into which the normal vector
points (see Fig.A.1). We denote by D − the other side of D, which is exterior to the flow.
Recall that in Eq.A.1 the normal vector points into the fluid consistent with the figure.
To proceed, we re-write Eq.A.1 in the equivalent form
IjDL (x0 ) =
Z Z
D
[ui (x) − ui (x0 )] Tijk (x, x0 )nk (x)dS(x)+
Z Z
D
ui (x0 )Tijk (x, x0 )nk (x)dS(x)
(A.4)
Next we decompose I DL thus,
IjDL (x0 ) = Yj (x0 ) + Qj (x0 )
where
Yj (x0 ) =
and
Z Z
D
Qj (x0 ) =
(A.5)
[ui (x) − ui (x0 )] Tijk (x, x0 )nk (x)dS(x)
(A.6)
Z Z
(A.7)
D
ui (x0 )Tijk (x, x0 )nk (x)dS(x)
119
The discontinuity of the double-layer potential for Stokes flow
Figure A.1
We perform this decomposition because the integral A.6 is continuous as x0 crosses
D, and we can focus attention on Qj .
From Eq. 2.69 we have
8π
Tijk (x, x0 )nk (x)dS(x) = 4π δij
D
0
Z
(A.8)
depending on the position of xO respect to D, where S is a closed surface and the unit
normal points into S.
So, when x0 is inside D,
When x0 is outside S,
When x0 is on S,
Qj (x0 ) = 8πui (x0 )δij = 8πuj (x0 ) = Q+
j
(A.9)
Qj (x0 ) = 0 = Q−
j
(A.10)
Qj (x0 ) = 4πuj (x0 ) = QSj
(A.11)
From A.5 as x0 → D + from inside the flow,
IjDL (x0 ) → Yj+ + Q+
j
(A.12)
where Yj+ is the limiting value of Yj as x0 → D + . Also, as x0 → S − from outside of the
flow,
IjDL (x0 ) → Yj− + Q−
(A.13)
j
where Yj− is the limiting value of Yj as x0 → D − .
120
The discontinuity of the double-layer potential for Stokes flow
But since Yj is continuous as x0 crosses D, we have Yj+ = Yj− = YjS , say, and so
lim IjDL (x0 ) = YjS + Q+
j
(A.14)
lim IjDL (x0 ) = YjS + Q−
j
(A.15)
x0 →D +
x0 →D −
define the principal value of the double-layer potential, IjDL−P V as its value when x0 lies
on S, namely
Z PV
DL−P V
ui (x)Tijk (x, x0 )nk (x)dS(x)
(A.16)
Ij
=
S
The superscript P V on the integral reminds us that x0 lies precisely on S.
Taking x0 to lie on S in A.5 we have
IjDL−P V (x0 ) = YjS + QSj
(A.17)
YjS = IjDL−P V (x0 ) − QSj = IjDL−P V (x0 ) − 4πuj (x0 )
(A.18)
and so, using A.11
Therefore, we have
lim IjDL (x0 ) = YjS + Q+
j = 4πuj (x0 ) +
x0 →D +
Z
PV
S
ui (x)Tijk (x, x0 )nk (x)dS(x)
(A.19)
and
lim IjDL (x0 ) = YjS + Q−
j = −4πuj (x0 ) +
x0 →D −
Z
PV
S
ui (x)Tijk (x, x0 )nk (x)dS(x) (A.20)
So across S, the double layer potential I D LP experiences a jump of size
−
Q+
j − Qj = 8πuj (x0 )
(A.21)
121
Appendix B
Axisymmetric Green function for
capillary flows
We build in this section the axisymmetric Green’s function Mtube in a domain externally
bounded by a cylindrical tube of radius Rc . As fist requirement we want that the velocity
field vanish over the surface of the tube at r = Rc . We decompose the Green’s function into
a free-space and a complementary component M tube = M f s + M c . The complementary
component is (Tozeren, 1984):
c
Mzz
= r0
Z
∞
"
tI0 (ω)
ωI1 (ω) + 2I0 (ω)
#
Az cos(ẑt) dt
c
Mzr
Z
∞
"
tI0 (ω)
ωI1 (ω) + 2I0 (ω)
#
Ar sin(ẑt) dt
Z
∞
= r0
c
Mrz
c
Mrr
0
0
= r0
= −r0
0
Z
0
"
∞
"
tI1 (ω)
ωI0 (ω)
tI1 (ω)
ωI0 (ω)
#
Az sin(ẑt) dt
#
Ar cos(ẑt) dt
(B.1)
where ω = tr, Az and Ar are function of ω0 = tr0 , ωc = tRc and t and arise as
solutions to a linear system (Pozrikidis, 1992a), I0 ,I1 ,K0 and K1 are the modified Bessel
functions of zero-th and first order.
c that
The only singularity problem in the previous expression is into the term Mzz
c
tends diverge for t → 0 as Mzz = 8 ln t + · · ·. To subtract off the logarithmic singularity
we can use the identity:
π
=2
2
[ẑ + (2Rc − r − r0 )2 ]1/2
Z
∞
0
K0 (2Rc − r − r0 ) cos(ẑt) dt
and write (John Happel, 1973)
c
Mzz
= r0
Z
∞
0
[Fzz + 8K0 (2Rc − r − r0 )] cos(ẑt) dt −
123
[ẑ 2
4πr0
+ (2Rc − r − r0 )2 ]1/2
Axisymmetric Green function for capillary flows
In order to compute the integrals B.1 we can use the Laguerre-Gauss quadrature
(Abramowitz & Stegun, 1972), that is a Gaussian quadrature over the interval [0, ∞) with
weighting function W (x) = exp(−x) and fits all polynomials of degree 2m − 1 exactly.
Unfortunately, the arguments of the integrals B.1 are oscillating and we have to use the
Filon’s quadrature formula (Abramowitz & Stegun, 1972), that is supposed to be exact
in a finite interval for integrands of the form f (x) sin(mx) where f (x) is a polynomial of
degree 2 or less. In our case the range of integration is semi-infinite, so we have to use
both the Filon formula for the first highly oscillating part of integration range and the
Laguerre-Gauss quadrature to compute the final exponentially decreasing part.
124
Appendix C
Filon formula
For a given function f (x) within a closed interval [a; b], the interval must be divided
into 2p sections where each one has width h. Within each section, f (x) is replaced by
a polynomial approximation, in particular a second-degree polynomial. The integration
formula is applied to each panel. Finally the sum of the contributions from each section
gives the desired quadrature formula. These formulas are Fosdick (1968)
S = h[α (f0 cos(kx0 ) − f2p cos(kx2p ) ) + βS2p + γS2p−1 ] + Es
C = h[α (f2p cos(kx2p ) − f0 cos(kx0 ) ) + βC2p + γC2p−1 ] + Ec
(C.1)
(C.2)
where
S2p =
S2p−1 =
C2p =
C2p−1 =
p
X
i=0
p
X
i=1
p
X
i=0
p
X
f2i sin(kx2i ) −
1
[f0 sin(kx0 ) + f2p sin(kx2p )]
2
f2i−1 sin(kx2i−1 )
f2i cos(kx2i ) −
(C.3)
(C.4)
1
[f0 cos(kx0 ) + f2p cos(kx2p )]
2
f2i−1 cos(kx2i−1 )
(C.5)
(C.6)
i=1
α = 1/θ + sin(2θ)/2θ 2 − 2 sin2 (θ)/θ 3
h
β = 2 (1 + cos2 (θ))/θ 2 − sin(2θ)/θ 3
h
γ = 4 sin(θ)/θ 3 − cos(θ)/θ 2
θ = kh
i
i
(C.7)
(C.8)
(C.9)
(C.10)
where we call fi = f (xi ), xi+1 − xi = h, x0 = a , x2p = b and Es and Ec are the
errors associated with using the first term on the right of Eq. (C.1) and (C.2) as an
approximation for S and C. For small θ it’s necessary to replace the expressions for α,β
and γ by power series in θ to avoid the loss of significant figures due to cancellation in
125
Filon formula
these expressions. So we have Abramowitz & Stegun (1972) :
α = 2θ 3 /45 − 2θ 5 /315 + 2θ 7 /4725
2
4
6
β = 2/3 + 2θ /15 − 4θ /105 + 2θ /567
2
4
6
γ = 4/3 − 2θ /15 + θ /210 − θ /11340
126
(C.11)
(C.12)
(C.13)
Bibliography
A. Diaz, D. Barthès-Biesel 2002 Entrance of a bioartificial capsule in a pore. Comput.
Model. Engng. Sci. 3, 321. 64
Abkarian, M., Faivre, M. & Viallat, A. 2007 Swinging of red blood cells under
shear flow. Phys. Rev. Lett. 98, 188302. 96
Abkarian, Manouk, Lartigue, Colette & Viallat, Annie 2001 Motion of phospholipidic vesicles along an inclined plane: Sliding and rolling. Phys. Rev. E 63, 041906.
53
Abkarian, M., Lartigue, C. & Viallat, A. 2002 Tank treading and unbinding of
deformable vesicles in shear flow: Determination of the lift force. Phys. Rev. Lett. 88 (6),
068103. 80
Abramowitz, Milton & Stegun, Irene A., ed. 1972 Handbook of Mathematical
Functions with Formulas, Graphs, and Mathematical Tables. New York: Dover Publications. 29, 67, 124, 126
Abreu, David, Levant, Michael, Steinberg, Victor & Seifert, Udo 2014 Fluid
vesicles in flow. Adv Colloid Interface Sci Http://dx.doi.org/10.1016/j.cis.2014.02.004.
17
Ascoli, EP 1988 The effects of a planar wall on the low Reynolds number motion of
solid particles, drops and bubbles. PhD thesis, California Institute of Technology. 49,
50, 59
Ascoli, E. P., Dandy, D. S. & Leal, L. G. 1989 Buoyancy-driven motion of a deformable drop toward a planar wall at low Reynolds number. Journal of Fluid Mechanics
213 (-1), 287. 11, 45, 49, 59, 64
Bernard, A. L., Guedeau-Boudeville, M. A., Jullien, L. & di Meglio, J. M.
2000 Strong adhesion of giant vesicles on surfaces: Dynamics and permeability. Langmuir
16 (17), 6809–6820. 45
Biben, T. & Misbah, C. 2003 Tumbling of vesicles under shear flow within an advectedfield approach. Phys. Rev. E 67 (3), 031908. 37
Boedec, Gwenn 2011 Modélisation d’une vésicule sous forçage hydrodynamique. PhD
thesis, Université Aix-Marseille. 12
127
BIBLIOGRAPHY
Boedec, G., Jaeger, M. & Leonetti, M. 2011a Settling of a vesicle in the limit of
a quasi-spherical shape. Accepted in J. Fluid Mech. . 12, 18
Boedec, Gwenn, Jaeger, Marc & Leonetti, Marc 2013 Sedimentation-induced
tether on a settling vesicle. Phys. Rev. E 88, 010702. 12, 37, 81, 108
Boedec, Gwenn, Jaeger, Marc & Leonetti, Marc 2014 Pearling instability of a
cylindrical vesicle. Journal of Fluid Mechanics 743, 262–279. 37
Boedec, G., Leonetti, M. & Jaeger, M. 2011b 3d vesicle dynamics simulations
with a linearly triangulated surface. J. Comp. Phys. 230, 1020–1034. 12, 13, 18, 19, 21,
22, 33, 81, 107
Boulton-Stone, J. M. & Blake, J. R. 1993 Gas bubbles bursting at a free surface.
Journal of Fluid Mechanics 254, 437–466. 17
Burns, J. M., Yang, X., Forouzan, O., Sosa, J. M. & Shevkoplyas, S. S. 2012
Artificial microvascular network: a new tool for measuring rheologic properties of stored
red blood cells. Transfusion 52 (5), 1010–1023. 96
Canham, P.B. 1970 The minimum energy of bending as a possible explanation of the
biconcave shape of the human red blood cell. J. Theor. Biol. 26, 61–81. 4, 96
Cantat, I. & Misbah, C 1999 Lift force and dynamical unbinding of adhering vesicles
under shear flow. Phys. Rev. Lett. 83, 880. 37
Chatkaew, S., Georgelin, M., Jaeger, M. & Leonetti, M. 2009 Dynamics of
vesicle unbinding under axisymmetric flow. Phys. Rev. Lett. 103 (24), 248103. 12, 47
Cordasco, Daniel & Bagchi, Prosenjit 2014 Intermittency and synchronized motion of red blood cell dynamics in shear flow. Journal of Fluid Mechanics 759, 472–488.
97
Coupier, Gwennou, Farutin, Alexander, Minetti, Christophe, Podgorski,
Thomas & Misbah, Chaouqi 2012 Shape diagram of vesicles in poiseuille flow. Phys.
Rev. Lett. 108, 178106. 35, 64, 78, 82, 83, 84, 88
Coupier, G., Kaoui, B., Podgorski, T. & Misbah, C. 2008 Noninertial lateral
migration of vesicles in bounded poiseuille flow. Phys. Fluids 20 (11), 111702. 64, 98
D. TSELUIKO, M. G. BLYTH, D. T. PAPAGEORGIOU & VANDENBROECK, J.-M. 2008 Electrified viscous thin film flow over topography. Journal of
Fluid Mechanics 597, 449–475. 17
Danker, G., Vlahovska, P. M. & Misbah, C. 2009 Vesicles in poiseuille flow. Phys.
Rev. Lett. 102, 148102. 64
Dao, M., Li, J. & Suresh, S. 2006 Molecularly based analysis of deformation of
spectrin network and human erythrocyte. Materials Science and Engineering: C 26 (8),
1232 – 1244. 103
128
BIBLIOGRAPHY
Dao, M., Lim, C.T. & Suresh, S. 2003 Mechanics of the human red blood cell
deformed by optical tweezers. Journal of the Mechanics and Physics of Solids 51 (11–12),
2259 – 2280. 109
De Gennes, P.G. 1991 Soft matter. In Nobel Lectures, Physics 1991–1995 . World
Scientific Publishing Co. 1
Deschamps, J., Kantsler, V. & Steinberg, V. 2009 Phase diagram of single vesicle
dynamical states in shear flow. Phys. Rev. Lett. 102 (11), 118105. 37
Discher, D. E., Boal, D. H. & Boey, S. K. 1998 Simulations of the erythrocyte
cytoskeleton at large deformation. ii. micropipette aspiration. Biophysical Journal 75 (3),
1584 – 1597. 99
Duperray, Alain & Étienne, Jocelyn 2011 Initial dynamics of cell spreading are
governed by dissipation in the actin cortex. Biophysical Journal 101 (3), 611–621. 46
Elasmi, L., Berzig, M. & Feuillebois, F. 2003 Stokes flow for the axisymmetric motion of several spherical particles perpendicular to a plane wall. Zeitschrift fur
Angewandte Mathematik und Physik (ZAMP) 54 (2), 304–327. 46
Evans, E.A. 1973 New membrane concept applied to the analysis of fluid shear- and
micropipette-deformed red blood cells. Biophysical Journal 13 (9), 941 – 954. 96
Evans, E.A. & Skalak, R. 1980 Mechanics and Thermodynamics of Biomembranes.
Florida: CRC Press Inc. 96, 109
Fahraeus, R. & Lindqvist, T. 1931 The viscosity of the blood in narrow capillary
tubes. Am. J. Physiol. 96. 63
Farutin, Alexander, Aouane, Othmane & Misbah, Chaouqi 2012 Vesicle dynamics under weak flows: Application to large excess area. Phys. Rev. E 85, 061922.
37
Farutin, Alexander & Misbah, Chaouqi 2011 Symmetry breaking of vesicle shapes
in Poiseuille flow. Phys. Rev. E 84 (1), 011902. 11, 64, 89
Farutin, Alexander & Misbah, Chaouqi 2014 Symmetry breaking and crossstreamline migration of three-dimensional vesicles in an axial poiseuille flow. Phys. Rev.
E 89, 042709. 88, 89
Fedosov, Dmitry A., Caswell, Bruce & Karniadakis, George E. 2010a A
multiscale red blood cell model with accurate mechanics, rheology, and dynamics. Biophysical Journal 98 (10), 2215–2225. 100, 101, 102
Fedosov, Dmitry A., Caswell, Bruce & Karniadakis, George E. 2010b Systematic coarse-graining of spectrin-level red blood cell models. Computer Methods in
Applied Mechanics and Engineering 199 (29-32), 1937–1948. 96, 100, 101, 102, 103, 112
129
BIBLIOGRAPHY
Fedosov, D. A., Lei, H., Caswell, B., Suresh, S. & Karniadakis, G. E. 2011
Multiscale modeling of red blood cell mechanics and blood flow in malaria. PLoS Comput
Biol (7(12): e1002270). 99
Fischer, T. M. 2004 Shape memory of human red blood cells. Biophysical Journal
86 (5), 3304–3313. 97
Fosdick, Lloyd D. 1968 A special case of the filon quadrature formula. Mathematics
of Computation 22 (101), pp. 77–81. 125
Galvin, K.P., Cork, A. & Wall, T.F. 1996 Droplet impaction with a substrate—the
critical condition for detachment. Colloids and Surfaces A: Physicochemical and Engineering Aspects 113 (1–2), 107 – 116. 45
Glenister, Fiona K., Coppel, Ross L., Cowman, Alan F., Mohandas, Narla
& Cooke, Brian M. 2002 Contribution of parasite proteins to altered mechanical
properties of malaria-infected red blood cells. Blood 99 (3), 1060–1063. 96
Grotehans, Stefan & Lipowsky, Reinhard 1990 Absence of first-order unbinding
transitions of fluid and polymerized membranes. Phys. Rev. A 41, 4574–4577. 51
Guedeau-Boudeville, M. A., Jullien, L. & di Meglio, J. M. 1995 Drug delivery:
piercing vesicles by their adsorption onto a porous medium. Proceedings of the National
Academy of Sciences 92 (21), 9590–9592. 45
Guido, S. & Tomaiuolo, G. 2009 Microconfined flow behavior of red blood cells in
vitro. Comptes Rendus Physique 10 (8), 751 – 763. 3
Hansen, J.C., Skalak, R., Chien, S. & Hoger, A. 1997 Influence of network
topology on the elasticity of the red blood cell membrane skeleton. Biophysical Journal
72, 2369–2381. 96
Hartland, S. 1967 The approach of a liquid drop to a flat plate. Chemical Engineering
Science 22 (12), 1675 – 1687. 45
Hartland, S. 1970 The profile of the draining film between a fluid drop and a deformable fluid—liquid interface. The Chemical Engineering Journal 1 (1), 67 – 75, the
Chemical Engineering Journal. 45
Helfrich, W. 1973 Elastic properties of lipid bilayers: theory and possible experiments.
Z. Naturforsch. C 28, 693–703. 5
Higdon, J. J. L. & Muldowney, G. P. 1995 Resistance functions for spherical particles, droplets and bubbles in cylindrical tubes. Journal of Fluid Mechanics 298, 193–210.
72
Hochmuth, R. M. 2012 Micropipette aspiration of living cells. Journal of Biomechanics
33 (1), 15–22. 96
130
BIBLIOGRAPHY
Hochmuth, R M & Waugh, R E 1987 Erythrocyte membrane elasticity and viscosity.
Annual Review of Physiology 49 (1), 209–219. 96
Hsu, R. & Secomb, T. W. 1989 Motion of nonaxisymmetric red blood cells in cylindrical capillaries. Journal of Biomechanical Engineering 111 (2), 147–151. 89
Hu, Wei-Fan, Kim, Yongsam & Lai, Ming-Chih 2014 An immersed boundary
method for simulating the dynamics of three-dimensional axisymmetric vesicles in
navier–stokes flows. Journal of Computational Physics 257, Part A (0), 670 – 686.
78, 82
Hu, X.-Q., Salsac, A.-V. & Barthès-Biesel, D. 2012 Flow of a spherical capsule in
a pore with circular or square cross-section. Journal of Fluid Mechanics 705, 176–194.
70
Huang, Z-H, Abkarian, M & Viallat, A 2011 Sedimentation of vesicles: from
pear-like shapes to microtether extrusion. New Journal of Physics 13 (3), 035026. 12,
37
Israelachvili, J.N. 2010 Intermolecular And Surface Forces, 3rd edn. Academic Press.
1
Jay, A.W. 1973 Viscoelastic properties of the human red blood cell membrane. i. deformation, volume loss, and rupture of red cells in micropipettes. Biophysical Journal
13 (11), 1166–1182. 85
John Happel, Howard Brenner 1973 Low Reynolds number hydrodynamics. Noordhoff International Publishing. 123
Kantsler, Vasiliy, Segre, Enrico & Steinberg, Victor 2008 Critical dynamics
of vesicle stretching transition in elongational flow. Phys. Rev. Lett. 101, 048101. 12
Kantsler, V. & Steinberg, V. 2005 Orientation and dynamics of a vesicle in tanktreading motion in shear flow. Phys. Rev. Lett. 95 (25), 258101. 37
Kantsler, V. & Steinberg, V. 2006 Transition to tumbling and two regimes of
tumbling motion of a vesicle in shear flow. Phys. Rev. Lett. 96 (3), 036001. 37
Kaoui, B., Biros, G. & Misbah, C. 2009a Why do red blood cells have asymmetric
shapes even in a symmetric flow ? Phys. Rev. Let. 103. 64, 79, 82, 88
Kaoui, B., Farutin, A. & Misbah, C. 2009b Vesicles under simple shear flow: Elucidating the role of relevant control parameters. Phys. Rev. E 80 (6), 061905. 37, 38
Kaoui, B., Ristow, B., Cantat, I., Misbah, C. & Zimmermann, W. 2008 Lateral
migration of a two-dimensional vesicle in unbounded poiseuille flow. Phys. rev. E 77,
021903. 64
131
BIBLIOGRAPHY
Kaoui, B., Tahiri, N., Biben, T., Ez-Zahraouy, H., Benyoussef, A., Biros, G.
& Misbah, C. 2011 Complexity of vesicle microcirculation. Phys. Rev. E 84, 041906.
11, 64
Kraus, M., Seifert, U. & Lipowsky, R. 1995 Gravity-induced shape transformations
of vesicles. EPL (Europhysics Letters) 32 (5), 431. 46, 53, 57
Kraus, M., Wintz, W., Seifert, U. & Lipowsky, R. 1996 Fluid vesicles in shear
flow. Phys. Rev. Lett. 77 (17), 3685. 37
Lac, E. & Sherwood, J. D. 2009 Motion of a drop along the centreline of a capillary
in a pressure-driven flow. Journal of Fluid Mechanics 640, 27–54. 35, 73
Lefebvre, Yannick, Leclerc, Eric, Barthès-Biesel, Dominique, Walter, Johann & Edwards-Lévy, Florence 2008 Flow of artificial microcapsules in microfluidic channels: A method for determining the elastic properties of the membrane. Physics
of Fluids (1994-present) 20 (12), –. 11
Li, J., Dao, M., Lim, C.T. & Suresh, S. 2005 Spectrin-level modeling of the cytoskeleton and optical tweezers stretching of the erythrocyte. Biophysical Journal 88 (5), 3707
– 3719. 99, 102
Li, X., Vlahovska, P. M. & Karniadakis, G. E. 2013 Continuum- and particlebased modeling of shapes and dynamics of red blood cells in health and disease. Soft
Matter 9, 28–37. 17, 96, 97, 100
Li, X. Z., Barthes-Biesel, D. & Helmy, A. 1988 Large deformations and burst of
a capsule freely suspended in an elongational flow. J. Fluid Mech. 187, 179–196. 64
Lim H. W., Gerald, Wortis, Michael & Mukhopadhyay, Ranjan 2002 Stomatocyte–discocyte–echinocyte sequence of the human red blood cell: Evidence for the
bilayer– couple hypothesis from membrane mechanics. Proceedings of the National
Academy of Sciences 99 (26), 16766–16769. 97
Liron, N. & Shahar, R. 1978 Stokes flow due to a stokeslet in a pipe. Journal of Fluid
Mechanics 86, 727–744. 73
McWhirter, J. Liam, Noguchi, Hiroshi & Gompper, Gerhard 2011 Deformation
and clustering of red blood cells in microcapillary flows. Soft Matter 7, 10967–10977. 98
Meyer, M., Desbrun, M., Schroeder, P. & Barr, A. 2002 Discrete differential
geometry operators for triangulated 2-manifolds. In VisMath ’02 Proceedings. 21, 22
Mills, J.P., Qie, L., Dao, M., Lim, C.T. & Suresh, S. 2004 Nonlinear elastic and
viscoelastic deformation of the human red blood cell with optical tweezers. Mechanics
and chemistry of biosystems 1 (3), 169–180. 96
Misbah, C. 2006 Vacillating breathing and tumbling of vesicles under shear flow. Phys.
Rev. Lett. 96 (2), 028104. 37
132
BIBLIOGRAPHY
Nadim, Ali 1997 IABEM Symposium on Boundary Integral Methods for Nonlinear
Problems. Springer Netherlands. 17
Noguchi, H & Gompper, G. 2005a Dynamics of fluid vesicles in shear flow: effect of
membrane viscosity and thermal fluctuations. Phys. Rev. E 72, 011901. 37
Noguchi, H. & Gompper, G. 2005b Shape transitions of fluid vesicles and red blood
cells in capillary flows. Proceedings of the National Academy of Sciences of the United
States of America 102 (40), 14159–14164. 82, 88, 98, 101, 102
Noguchi, H., Gompper, G., Schmidt, L., Wixforth, A. & Franke, T. 2010
Dynamics of fluid vesicles in flow through structured microchannels. EPL 89, 28002. 64
Peng, Zhangli, Asaro, Robert & Zhu, Qiang 2010 Multiscale simulation of erythrocyte membranes. Phys. Rev. E 81, 031904. 102
Peng, Z., Asaro, R. J. & Zhu, Q. 2011 Multiscale modelling of erythrocytes in stokes
flow. Journal of Fluid Mechanics 686, 299–337. 98
Peng, Zhangli, Mashayekh, Adel & Zhu, Qiang 2014 Erythrocyte responses in
low-shear-rate flows: effects of non-biconcave stress-free state in the cytoskeleton. Journal of Fluid Mechanics 742, 96–118. 97
Pivkin, Igor V. & Karniadakis, George Em 2008 Accurate coarse-grained modeling
of red blood cells. Phys. Rev. Lett. 101, 118105. 98, 101, 102
Pozrikidis, C. 1992a Boundary integral and singularity methods for linearized viscous
flow. Cambridge university press. 11, 12, 18, 20, 28, 29, 48, 59, 64, 66, 123
Pozrikidis, C. 1992b The buoyancy-driven motion of a train of viscous drops within a
cylindrical tube. Journal of Fluid Mechanics 237, 627–648. 39, 40, 42, 64
Pozrikidis, C. 2002 A pratical guide to boundary element methods with the software
library BEMLIB. Chapman & Hall. 20, 39, 40, 48, 59
Pozrikidis, C. 2005a Axisymmetric motion of a file of red blood cells through capillaries. Physics of Fluids (1994-present) 17 (3), –. 64, 96, 100
Pozrikidis, C. 2005b Numerical simulation of cell motion in tube flow. Annals of
Biomedical Engineering 33 (2), 165–178. 89, 98
Pozrikidis, C. & Davis, J. M. 2011 Resistance and pressure coefficients for a periodic array of spherical, spheroidal, and cylindrical particles inside a circular tube. IMA
Journal of Applied Mathematics . 72
Pries, A. R., Neuhaus, D. & Gaehtgens, P. 1992 Blood viscosity in tube flow:
dependence on diameter and hematocrit. American Journal of Physiology - Heart and
Circulatory Physiology 263 (6), H1770–H1778. 63
133
BIBLIOGRAPHY
Quéguiner, C. & Barthès-Biesel, D. 1997 Axisymmetric motion of capsules through
cylindrical channels. J. Fluid Mech. 348, 349–376. 11, 64
Rädler, Joachim O., Feder, Toni J., Strey, Helmut H. & Sackmann, Erich
1995 Fluctuation analysis of tension-controlled undulation forces between giant vesicles
and solid substrates. Phys. Rev. E 51, 4526–4536. 46, 51
Rey Suárez, Iván, Leidy, Chad, Téllez, Gabriel, Gay, Guillaume &
Gonzalez-Mancera, Andres 2013 Slow sedimentation and deformability of charged
lipid vesicles. PLoS ONE 8 (7), e68309. 46, 51, 53, 54
Rioual, F., Biben, T. & Misbah, C. 2004 Analytical analysis of a vesicle tumbling
under a shear flow. Phys. Rev. E 69 (6), 061914. 37
Scheffer, Luana, Bitler, Arkady, Ben-Jacob, Eshel & Korenstein, Rafi
2001 Atomic force pulling: probing the local elasticity of the cell membrane. European
Biophysics Journal 30 (2), 83–90. 8
Secomb, TimothyW., Styp-Rekowska, Beata & Pries, AxelR. 2007 Twodimensional simulation of red blood cell deformation and lateral migration in microvessels. Annals of Biomedical Engineering 35 (5), 755–765. 89
Secomb, T. W., Skalak, R., Ozkaya, N. & Gross, J. F. 1986 Flow of axisymmetric
red blood cells in narrow capillaries. J. Fluid Mech. 163, 405–423. 96
Seifert, Udo 1991 Adhesion of vesicles in two dimensions. Phys. Rev. A 43, 6803–6814.
46
Seifert, U. 1999 Fluid membranes in hydrodynamic flow fields: Formalism and an
application to fluctuating quasispherical vesicles in shear flow. Eur. Phys. J B. pp. 405–
415. 8
Seifert, Udo, Berndl, Karin & Lipowsky, Reinhard 1991 Shape transformations
of vesicles: Phase diagram for spontaneous- curvature and bilayer-coupling models. Phys.
Rev. A 44 (2), 1182–1202. 7, 96
Seifert, Udo & Lipowsky, Reinhard 1990 Adhesion of vesicles. Phys. Rev. A 42,
4768–4771. 46
Shi, Lingling, Pan, Tsorng-Whay & Glowinski, Roland 2012 Deformation of a
single red blood cell in bounded poiseuille flows. Phys. Rev. E 85, 016307. 99
Shin, Soo Jai & Sung, Hyung Jin 2011 Inertial migration of an elastic capsule in a
poiseuille flow. Phys. Rev. E 83, 046321. 99
Skalak, R. & Branemark, P I 1969 Deformation of red blood cells in capillaries.
Science 164 (3880), 717–719. 89
Skalak, R., Tozeren, A., Zarda, R.P. & Chien, S. 1973 Strain energy function of
red blood cell membranes. Biophysical Journal 13 (3), 245 – 264. 96
134
BIBLIOGRAPHY
Sukumaran, S. & Seifert, U. 2001 Influence of shear flow on vesicles near a wall: A
numerical study. Phys. Rev. E 64 (1), 011916. 51
Suresh, S., Spatz, J., Mills, J.P., Micoulet, A., Dao, M., Lim, C.T., Beil,
M. & Seufferlein, T. 2005 Connections between single-cell biomechanics and human
disease states: gastrointestinal cancer and malaria. Acta Biomaterialia 1 (1), 15 – 30.
109, 110
Tabeling, P. 2005 Introduction to microfluidics. Oxford university press. 3
Tomaiuolo, Giovanna, Simeone, Marino, Martinelli, Vincenzo, Rotoli,
Bruno & Guido, Stefano 2009 Red blood cell deformation in microconfined flow.
Soft Matter 5, 3736–3740. 89, 96
Tozeren, H. 1984 Boundary integral equation method for some stokes problems. International Journal for Numerical Methods in Fluids 4 (2), 159–170. 66, 123
Trozzo, R., Boedec, G., Leonetti, M. & Jaeger, M. 2014 Axisymmetric boundary element method for vesicles in a capillary. Submitted to J. Computational Phys. .
66
Tsukada, Kosuke, Sekizuka, Eiichi, Oshio, Chikara & Minamitani, Haruyuki
2001 Direct measurement of erythrocyte deformability in diabetes mellitus with a transparent microchannel capillary model and high-speed video camera system. Microvascular
Research 61 (3), 231 – 239. 63
Veerapaneni, S.K., Gueyffier, D., Biros, G. & Zorin, D. 2009 A numerical
method for simulating the dynamics of 3d axisymmetric vesicles suspended in viscous
flows. J. Comput. Phys. 228 (19), 7233 – 7249. 64
Vitkova, V., Mader, M. & Podgorski, T. 2004 Deformation of vesicles flowing
through capillaries. EPL (Europhysics Letters) 68 (3), 398. 11, 64, 80, 81, 82, 88
Vlahovska, P., Podgorski, T. & Misbah, C. 2009 Vesicles and red blood cells in
flow: From individual dynamics to rheology. C. R. Phys. 10 (8), 775 – 789, complex and
biofluids. 64
Vlahovska, Petia M., Barthes-Biesel, Dominique & Misbah, Chaouqi 2013
Flow dynamics of red blood cells and their biomimetic counterparts. C. R. Phys. 14 (6),
451 – 458. 17
Warner, H.R. 1972 Kinetic theory and rheology of dilute suspensions of finitely extendible dumbbells. Ind. Eng. Chem. Fundam. 11, 379 – 387. 102
Y. Lefebvre, D. Barthès-Biesel 2007 Motion of capsules in a cylindrical tube: effect
of membrane pre-stress. J. Fluid Mech. 589, 157. 64
Zhao, H. & Shaqfeh, E. S. G. 2011 The dynamics of a vesicle in simple shear flow.
Journal of Fluid Mechanics 674, 578–604. 37
135
BIBLIOGRAPHY
Zhao, Hong & Shaqfeh, Eric S. G. 2013 The shape stability of a lipid vesicle in a
uniaxial extensional flow. J. Fluid Mech. 719, 345–361. 12, 64
Zhong-can, O.-Y. & Helfrich, W. 1989 Bending energy of vesicle membranes: General expressions for the first, second, and third variation of the shape energy and applications to spheres and cylinders. Phys. Rev. A 39, 5280–5288. 8
136