Convolutive Bounded Component Analysis Algorithms for
advertisement

1
Convolutive Bounded Component Analysis
Algorithms for Independent and Dependent Source
Separation
Huseyin A. Inan, Student Member, IEEE, Alper T. Erdogan, Senior Member, IEEE
Abstract— Bounded Component Analysis (BCA) is a framework that can be considered as a more general framework than
Independent Component Analysis (ICA) under the boundedness
constraint on sources. Using this framework, it is possible to
separate dependent as well as independent components from
their mixtures. In this article, as an extension of a recently
introduced instantaneous BCA approach, we introduce a family
of convolutive BCA criteria and corresponding algorithms. We
prove that the global optima of the proposed criteria, under
generic BCA assumptions, are equivalent to a set of perfect separators. The algorithms introduced in this article are capable of
separating not only the independent sources but also the sources
that are dependent/correlated in both component (space) and
sample (time) dimensions. Therefore, under the condition that the
sources are bounded, they can be considered as “Extended Convolutive ICA” algorithms with additional dependent/correlated
source separation capability. Furthermore, they have potential
to provide improvement in separation performance especially
for short data records. The article offers examples to illustrate
the space-time correlated source separation capability through
a Copula distribution based example. In addition, a frequencyselective MIMO Equalization example demonstrates the clear
performance advantage of the proposed BCA approach over
the state of the art ICA based approaches in setups involving
convolutive mixtures of digital communication sources.
Index Terms— Bounded Component Analysis, Independent
Component Analysis, Convolutive Blind Source Separation, Dependent Source Separation, Finite Support, Frequency-Selective
MIMO Equalization.
I. I NTRODUCTION
The unsupervised separation of components (or sources)
from a set of their mixture samples has been a major research
topic in both machine learning and adaptive signal processing
[1]. The set of applications where the Blind Source Separation
(BSS) problem arises as the central issue is strikingly diverse
and has a very large span. The blindness property is the key to
the flexibility of this approach which leads to its widespread
use. However, the blindness feature also makes BSS a challenging problem to solve. The hardship caused by the lack of
training data and relational statistical information is generally
overcome by exploiting some side information/assumptions
about the model.
This work was supported in part by TUBITAK 112E057 Project.
Huseyin A. Inan is with Electrical-Electronics Engineering Department of
Koc University, Sariyer, Istanbul, 34450, Turkey. Contact Information: Email:
hinan@ku.edu.tr
Alper T. Erdogan is with Electrical-Electronics Engineering Department of
Koc University, Sariyer, Istanbul, 34450, Turkey. Contact Information: Email:
alper@stanfordalumni.org, Phone:+90 (212) 338 1490, Fax: +90 (212) 338
1548
The most common assumption is the mutual statistical independence of sources. The approach based on this assumption is
referred to as the Independent Component Analysis (ICA) and
it is the most popular and successful BSS approach [1]–[3].
There have been several other assumptions mostly fortifying
the independence assumption such as time structure (e.g., [4],
[5]), sparsity (e.g., [6]) and special constant modulus or finite
alphabet structure of communications signals (e.g. [7]–[9]).
In typical practical BSS applications source values take their
values from a compact set. This property has been exploited
especially in some recent ICA algorithms. The potential for
utilizing the boundedness property as an additional assumption
in the ICA framework was first put forward in [10]. In this
work, Pham reformulated the mutual information cost function
in terms of order statistics. In the bounded case, this formulation leads to the effective minimization of the separator output
ranges. In the similar direction, Cruces and Duran showed
that an optimization framework based on Renyi’s Entropy
leads to support length minimization to extract sources from
their mixtures [11]. Vrins et. al, utilized range minimization approach to obtain alternative ICA algorithms [12]–[14].
Parallel to these contributions, Erdogan extended the infinity
norm minimization based blind equalization approach in [15],
[16] to obtain source separation algorithms, again within ICA
framework, based on infinity norm minimization [17], [18].
These algorithms assumed peak symmetry for the bounded
sources, which is later abandoned in [19].
Following these contributions related to exploitation of
boundedness of signals within the ICA framework, recently,
Cruces showed that boundedness can be utilized to replace
mutual statistical independence assumption with a weaker
assumption [20]. This fact led to a new framework, named
Bounded Component Analysis (BCA), which enables separation of independent and dependent (even correlated) sources.
For bounded sources, BCA provides a more general framework than ICA, since the joint density factorability requirement of the mutual independence assumption is replaced
by the weaker domain separability assumption. The domain
separability assumption refers to the condition that the convexified effective support of the joint pdf to be written as the
cartesian product of their marginal pdf counterparts. Therefore,
it is a necessary condition for the independence. However,
for the independence assumption to hold there is a more
stringent requirement about the factorability of the joint pdf in
terms of product of marginals. BCA framework removes this
requirement, therefore provides a more flexible framework for
2
bounded sources including ICA as a special case.
Within the newly introduced BCA framework, Cruces introduced a source extraction algorithm in [20]. A deflationary
approach for BCA was recently proposed in [21]. In [22], total
range minimization is posed as a BCA approach for uncorrelated sources and the characterization of the stationary points
of the corresponding symmetric orthogonalization algorithm
are provided. More recently, Erdogan proposed a new BCA
approach which enables separation of both independent and
dependent, including correlated, bounded sources from their
instantaneous mixtures [23]. In this approach, two geometric
objects, namely principal hyperellipsoid and bounding hyperrectangle, concerning separator outputs are introduced. The
separation problem is posed as maximization of the relative
sizes of these objects, in which the size of hyperellipsoid is
chosen as its volume. When the size of bounding hyperrectangle is chosen as its volume, a generalized form of Pham’s
objective in [10], which was derived by manipulating the
mutual information objective in ICA framework, is obtained.
When the size of the bounding hyperrectangle is chosen as
a norm of its main diagonal, this leads to a set of BCA
algorithms whose global optima correspond to a fixed relative
scalings of sources at the separator outputs.
This article extends the instantaneous or memoryless BCA
approach introduced in [23] for the convolutive BCA problem.
We extend the objective functions proposed in [23] to cover
the more general case where the observations are space-time
mixtures of the original sources. In particular, we show that
the algorithms corresponding to these extensions are capable
of separating not only independent sources but also sources
which are potentially dependent and even correlated in both
space and time dimensions. This is a remarkable feature of
the proposed approach which is due to a proper exploitation
of the boundedness property of sources. The part of this work
is presented in IEEE ICASSP 2013 Conference [24]. We can
highlight the novel contributions of the article as:
1) The article provides a convolutive BCA approach which
can be used to generate algorithms that are capable of
separating not only independent sources but also dependent (even correlated) sources from their convolutive
mixtures. Therefore, for bounded sources, the article
proposes a more general framework than ICA for the
convolutive source separation problem that replaces the
strong mutual independence assumption with weaker
and more generic domain separability assumption leading to additional capability to separate sources which are
potentially dependent/correlated in both space and time
directions.
2) The article offers a set of convolutive BCA objectives
whose global optima are proven to correspond to perfect
separators.
3) Through a digital communications example, the article
illustrates the potential for the significant performance
improvement offered by the proposed BCA approach
over the state of the art ICA based approaches, especially
for short data records.
4) The article prescribes an approach based on the update
of time-domain filter parameters which is free of per-
mutation alignment problem suffered by the algorithms
using frequency domain updates. Furthermore, unlike
many time-domain convolutive ICA approaches, the proposed approach doesn’t require pre-whitening operation,
which is problematic in convolutive settings.
The organization of the article is as follows: Section II
describes the convolutive BCA setup assumed throughout
the article. The geometric optimization settings to solve the
convolutive BCA problem are introduced in Section III. The
perfect separation property of the global optimizers of these
settings are also shown in the same section. The algorithms
corresponding to the proposed geometric framework are provided in Section IV. Section V covers the extension of the
proposed approach for complex valued signals. The numerical
examples illustrating the performance of the BCA algorithms
are provided in Section VI. Finally, Section VII is the conclusion.
Notation: Let A ∈ Cp×q and a ∈ Cp×1 be arbitrary. The
notation used in the article is summarized in Table I.
Notation
Meaning
Am,: (A:,m )
R{A} (I{A})
kakr
diag(a)
mth row (column) of A
The real (imaginary) part of A
P
Usual r-norm given by ( pm=1 |a|r )1/r .
Diagonal matrix whose diagonal entries
starting in the upper left corner are a1 , . . . , ap .
a1 a2 . . . ap , i.e. the product of the
elements of a.
The convex support for random vector a
Standard basis vector pointing in the m direction.
Identity matrix
Kronecker product
Q
(a)
Sa
em
I
⊗
TABLE I
N OTATION USED IN THE ARTICLE .
Indexing: m is used for (source, output) vector components,
k is the sample index and i is the algorithm iteration index.
II. C ONVOLUTIVE B OUNDED C OMPONENT A NALYSIS
S ETUP
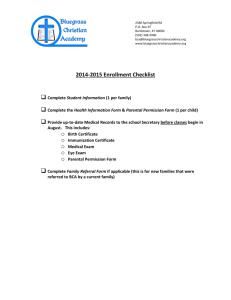
The convolutive BSS setup assumed throughout the article
is summarized in Figure 1.
The components of the convolutive BCA setup that we
consider throughout the article are as follows:
• The setup consists of p real sources. The sources are
represented by a zero mean (without loss of generality)
wide sense stationary vector process {s(k) ∈ Rp ; k ∈
Z} with a Power Spectral Density (PSD) {Ps (f ) ∈
Cp×p ; f ∈ [− 21 , 12 )}.
We further assume that ranges of the sources are bounded,
i.e., sm (k) ∈ [αm , βm ] where αm , βm ∈ R, βm > αm
for m = 1, ..., p and k ∈ Z. We define γm = R(sm ) =
βm − αm as the range of sm where R(·) is the range
operator providing the support length for the pdf of its
argument. We decompose the sources as
△
s(k) = Υs(k),
k ∈ Z,
3
•
We also
define
W̃ = W (0) W (1) . . . W (M − 1) as the separator coefficient matrix.
The overall system function is defined as
G(f ) = W(f )H(f ) =
P
−1
X
G(l)e−j2πf l ,
l=0
Fig. 1.
•
where {G(l); l ∈ {0, . . . , P − 1}} are the impulse
response coefficients, {G(f ); f ∈ [− 21 , 12 )} represents
the DTFT of the coefficients and P − 1 is the order
of overall system. Therefore, in the time domain, the
sources {s(k) ∈ Rp ; k ∈ Z} and the separator outputs
{z(k) ∈ Rp ; k ∈ Z} are related by
Convolutive Blind Source Separation Setup.
where Υ = diag(γ1 , γ2 , . . . , γp ) is the range matrix of
s and {s(k) ∈ Rp ; k ∈ Z} is the normalized source
process whose components have unit ranges.
The source signals are mixed by a MIMO system with a
q x p transfer matrix
H(f ) =
L−1
X
H(l)e−j2πf l ,
l=0
where {H(l); l ∈ {0, . . . , L − 1}} are the impulse
response coefficients and {H(f ); f ∈ [− 21 , 21 )} represents the Discrete Time Fourier Transform (DTFT) of the
impulse response. We assume that H(f ) is an equalizable
transfer function of order L − 1 [25]. The output of the
mixing MIMO system is denoted by {y(k) ∈ Rq ; k ∈
Z}. We have
Y (f ) = H(f )S(f ),
where Y (f ) is the Discrete Time Fourier Transform
(DTFT) of {y(k) ∈ Rq ; k ∈ Z}, S(f ) is the DTFT of
{s(k) ∈ Rp ; k ∈ Z}. Equivalently, in the time domain
y(k) =
L−1
X
l=0
•
H(l)s(k − l),
k ∈ Z.
We define H̃ = H(0) H(1) . . . H(L − 1) as
the mixing coefficient matrix.
Separator of the system
W(f ) =
M−1
X
W (l)e−j2πf l
l=0
is a p x q FIR transfer matrix of order M − 1 where
{W (l); l ∈ {0, . . . , M − 1}} are the impulse response
coefficients and {W(f ); f ∈ [− 21 , 21 )} represents the
DTFT of the coefficients. The separator output sequence
is denoted by {z(k) ∈ Rp ; k ∈ Z} whose DTFT can be
written as
Z(f ) = W(f )Y (f ).
Equivalently, in the time domain
z(k) =
M−1
X
l=0
W (l)y(k − l),
k ∈ Z.
z(k) =
P
−1
X
l=0
G(l)s(k − l),
k ∈ Z.
Defining G̃ = G(0) G(1) . . . G(P − 1) and
T
s̃(k) = s(k) s(k − 1) . . . s(k − P + 1)
, we
have z(k) = G̃s̃(k), for k ∈ Z. We obtain the range
matrix of s̃ as Υ̃ = I ⊗ Υ.
Unlike ICA, the sources are not assumed to be independent,
or uncorrelated, therefore implying that Ps (f ) is allowed
to be non-diagonal. We assume sources satisfy “the domain
separability” assumption (A1) which is stated as follows:
• (A1) The (convex hulls of the) domain of the extended
source vector (Ss̃ ) can be written as the cartesian product
of (the convex hulls of the) the individual components of
the extended source vector (Ss̃m for m = 1, 2, . . . , P p),
i.e., Ss̃ = Ss̃1 × Ss̃2 × . . . × Ss̃P p .
Note that s̃ corresponds to the collection of all random
variables from all p sources in a time window of length P .
Therefore, the domain separability assumption (A1) in effect
states that the convex support of the joint pdf corresponding
to all of these source random variables in a given P-length
time window, is separable, i.e., it can be written as the
cartesian product of convex supports of the marginals of these
random variables. This assumption essentially states that the
range of values for each of these random variables is not
determined by the values other random variables, whereas
the probability distribution defined over this range may be
dependent. Therefore, the assumption (A1) is a quite flexible
constraint, allowing arbitrary joint densities (corresponding
to dependent or independent random variables) over this
separable domain. The samples can, in fact, be correlated,
i.e., Ps (f ) can change with frequency. We point out that
(A1) is a much weaker assumption than the assumption of
independence of sources in both time and space dimensions. In
fact, the domain separability, which is a requirement about the
support set of the joint distribution, is a necessary condition for
the mutual independence. However, the mutual independence
assumption further dictates that the joint distribution is equal to
the product of the marginals, which is rather a strong additional
requirement on top of the domain separability.
If we compare the assumption (A1) with the assumptions
used in the convolutive ICA approaches: the independence
4
assumption in the ICA approaches refers to the mutual independence among sources. Some of the convolutive ICA
approaches further assume temporal independence, i.e., the
independence among the time samples of each source. In
such a case s̃ vector, containing all spatio-temporal source
samples in P-length time window, would be assumed to be an
independent vector which is a very strong assumption compared to (A1). Therefore, for bounded sources, the convolutive
BCA framework based on (A1) and enabling spatio-temporal
dependence among source samples is more general approach
and covers the convolutive ICA framework assuming temporal
independence as a special case. The same conclusion can
be extended for the convolutive ICA approaches that do not
assume temporal independence if and only if the temporal
dependence structure complies with the assumption (A1).
III. A FAMILY OF C ONVOLUTIVE BCA A LGORITHMS
A. A Convolutive BCA Optimization Framework
In this subsection, we extend the instantaneous BCA approach introduced in [23] to the convolutive BSS separation
problem. The BCA approach in [23] is based upon the
optimization of the relative sizes of two geometric objects,
namely the principal hyperellipsoid and bounding hyperrectangle, defined over the separator outputs. The main idea of
this approach is summarized in Appendix. We modify the first
(volume ratio) objective function of [23] as
!
Z 1
p
Y
1 2
log(det(Pz (f )))df − log
R(zm ) ,
J1 (W̃ ) =
2 − 12
m=1
(1)
where Pz (f ) is the PSD of the separator output sequence.
In the proposed objective function, we only modify the log
volume of the principal hyper-ellipse, i.e., the first term.
The definition of the volume of the principal hyper-ellipse
is extended from sample based correlation information to
process based correlation information, capturing inter-sample
correlations. We note that the objective in (1) is the asymptotic extension of the J1 objective in [23]. This extension
is obtained by concatenating source vectors in the source
process and invoking the wide sense stationarity property of
the sources along with the linear-time-invariance property of
mixing and separator systems such that the determinant of the
covariance in [23] converges to the integral term in (1). We
also note that this integral term or its modified forms (due to
the diagonality of the PSD for independent sources) appear in
some convolutive ICA approaches such as [26], [27].
B. The Global Optimality of the Perfect Separators
In this section we show that the global optima of the
objective function (1) corresponds to perfect separators. The
following theorem shows that the proposed objective is useful
for achieving separation of convolutive mixtures whose setup
is outlined in Section II.
Theorem: Assuming the setup in Section II, H(f ) is
equalizable by an FIR separator matrix of order M − 1 and
Ps (f ) ≻ 0 for all f ∈ [− 21 , 21 ), the set of global maxima for
J1 in (1) is equal to a set of perfect separator matrices.
Proof: Using the fact that
H
Pz (f ) = G(f )ΥPs (f )ΥT G(f ) ,
we obtain
Z 12
log(det(Pz (f )))df =
− 21
Z
1
2
− 21
Z
1
2
− 21
log |det(G(f )Υ)|2 det(Ps (f )) df =
log |det(G(f )Υ)|2 df +
Z
1
2
− 12
log det(Ps (f )) df.
(2)
Using the Hadamard inequality [28] yields
Z 21
log |det(G(f )Υ)|2 df ≤
− 12
!
Z 21
p
Y
2
log
|| (G(f )Υ)m,: ||2 df =
− 12
1
2
Z
m=1
p
X
log || (G(f )Υ)m,: ||22 df =
− 12 m=1
p Z 1
X
2
m=1
− 12
log || (G(f )Υ)m,: ||22 df,
(3)
where (G(f )Υ)m,: is the mth row of G(f )Υ. From Jensen’s
inequality [29], for m = 1, ..., p, we have
Z 12
log || (G(f )Υ)m,: ||22 df ≤
− 21
!
Z 1
2
log
− 21
|| (G(f )Υ)m,: ||22 df
.
The use of Parseval’s theorem yields
Z 12
|| (G(f )Υ)m,: ||22 df = ||(G̃Υ̃)m,: ||22 .
(4)
(5)
− 12
Thus, from (3-5), we obtain
Z 21
p
X
log ||(G̃Υ̃)m,: ||22 ,
log |det(G(f )Υ)|2 df ≤
− 12
m=1
(6)
which further implies,
Z 12
p
X
log(det(Pz (f )))df ≤
log ||(G̃Υ̃)m,: ||22
− 12
m=1
+
Z
1
2
− 12
As a result,
log det(Ps (f )) df.
(7)
Y
p
p
1 X
log ||(G̃Υ̃)m,: ||22 − log
R(zm )
2 m=1
m=1
Z 12
1
log det(Ps (f )) df.
(8)
+
2 − 21
J1 (W̃ ) ≤
5
Under the BCA’s domain separability assumption (A1) stated
in Section II, we can write the range of mth component of z
△
as R(zm ) = ||G̃m,: Υ̃||1 . We can further define Q = G̃Υ̃, the
range vector for the separator outputs can be rewritten as
R(z) = ||Q1,: ||1 ||Q2,: ||1 ... ||Qp,: ||1 .
(9)
If we rewrite the inequality (8) in terms of Q we obtain
!
p
p
X
Y
log ||Qm,: ||2 − log
J1 (W̃ ) ≤
||Qm,: ||1 ,
m=1
+
=
1
2
Z
1
2
− 12
p
X
m=1
1
+
2
Note that,
p
X
m=1
Z
m=1
log det(Ps (f )) df
log ||Qm,: ||2 −
1
2
− 12
p
X
m=1
log ||Qm,: ||1
log det(Ps (f )) df.
p
X
log ||Qm,: ||1 ,
log ||(Qm,: )||2 ≤
C. Extension of Convolutive BCA Optimization Framework
The framework introduced in section III-A is extended by
proposing different alternatives for the second term of the
objective function (1) (measure of the bounding hyperrectangle
for the output vectors). Example of such alternatives can be
achieved by choosing the length of the main diagonal of the
bounding hyperrectangle. As a result, we obtain a family of
alternative objective functions in the form
J2,r (W̃ ) =
1
2
1
2
Z
− 12
log(det(Pz (f )))df − log (||R(z)||pr ) ,
(14)
where r ≥ 1. By modifying (10), we can obtain the corresponding objective expression in terms of scaled overall
mapping Q as
(10)
(11)
m=1
due to the ordering ||q||1 ≥ ||q||2 for any q. Therefore,
Z 1
1 2
(12)
log det(Ps (f )) df.
J1 (W̃ ) ≤
2 − 12
We note that the equalities in (3) and (11) must be achieved
in order to achieve the equality in (12). The equality in
(11) is achieved if and only if each row of Q has only
one non-zero element which results in each row of G̃ has
only one non-zero element and the inequality in (3) is
achieved if and only if the rows
G(f ) are perpendicular
PPof
−1
−j2πf l
to
each
other.
Since
G(f
)
=
and G̃ =
l=0
G(l)e
G(0) G(1) . . . G(P − 1) , the combination of these
two requirements yield that the only one non-zero elements
in the rows of G̃ must not be positioned in the same indexes
with respect to mod p, otherwise, the rows of G(f ) would not
be perpendicular to each other.
As a result, the inequality in (12) is achieved if and only if
G̃ corresponds to perfect separator transfer matrix in the form
G(f ) = diag(α1 e−j2πf d1 , α2 e−j2πf d2 , . . . , αp e−j2πf dp )P
(13)
where αk ’s are non-zero real scalings, dk ’s are non-negative
integer delays, and P is a Permutation matrix. The FIR
equalizability of the mixing system implies the existence of
such parameters.
Here, we point out that virtual delayed source problem does
not exist in the proposed framework: In case, if one of the
separator outputs is the delayed version of another output
Pz (f ) becomes rank deficient, and therefore, its determinant
becomes zero. Therefore, the maximizing solution for the
proposed objective will avoid such cases as they will actually
minimize the PSD dependent term in the objective (1). This
fact is also reflected by the proof of the Theorem above.
J2,r (W̃ ) ≤
p
X
m=1
log ||Qm,: ||2 −
T p
log ||Q1,: ||1 ||Q2,: ||1 ... ||Qp,: ||1 r
Z 1
1 2
(15)
log det(Ps (f )) df.
+
2 − 21
The results of analyzing this objective function, for some
special r values:
• r = 1 Case: In this case, we can write
T p
kQ1,: k1 kQ2,: k1 . . . kQp,: k1
1
≥ p
p
p
Y
m=1
kQm,: k1 ,
where the inequation comes from Arithmetic-GeometricMean-Inequality, and the equality is achieved if and
only if all the rows of Q have the same 1-norm. In
consequence, we can write
J2,1 (W̃ ) ≤
p
X
m=1
log ||Qm,: ||2 −
− log(pp ) +
1
2
Z
1
2
− 12
p
X
m=1
log ||Qm,: ||1
log det(Ps (f )) df.
(16)
Similarly, from (11), we have
Z 1
1 2
log det(Ps (f )) df − log(pp ).
J2,1 (W̃ ) ≤
2 − 12
(17)
As a result, Q is a global maximum of J2,1 (W̃ ) if and
only if it is a perfect separator matrix of the form
Q = kPdiag(ρ),
where k is a non-zero value, ρ ∈ {−1, 1}p and P is a
permutation matrix. This implies G̃ is a global maximum
of J2,1 (W̃ ) if and only if it can be written in the form
G̃ = kPΥ̃−1 diag(ρ).
6
•
r = 2 Case: In this case, using the basic norm inequality,
for any a ∈ Rp , we have
where ν = N + M − 1, η = 2ν + 1 is the DFT size and
we use the PSD estimate for the separator outputs given
by
ν
X
P̂z (l) =
R̂z (k)e−j2πlk/η ,
1
||a||2 ≥ √ ||a||1 ,
p
where the equality is achieved if and only if all the
components of a are equal in magnitude. As a result,
we can write
p
p
X
X
J2,2 (W̃ ) ≤
log ||Qm,: ||2 −
log ||Qm,: ||1
m=1
1
R̂z (k) =
ν + 1 − |k|
m=1
− log(p
•
k=−ν
for l ∈ {−ν, ..., ν}, where N is the number of samples
and R̂z is the output sample autocovariance function,
defined as
p/2
1
)+
2
Z
1
2
− 12
log det(Ps (f )) df.
R̂(zm ) =
p
Y
1
p
||R(z)||
≥
R(zm ).
1
pp
m=1
where the equality is achieved if and only if all the
components of R(z) are equal in magnitude. Based on
this inequality, we obtain
J2,∞ (W̃ ) ≤
+
m=1
1
2
Z
log ||Qm,: ||2 −
1
2
− 21
p
X
m=1
log ||Qm,: ||1
log det(Ps (f )) df.
Ŵ(l) =
zm (k) −
min
k∈{1,2,...,N }
zm (k),
ν
X
W (k)e−j2πlk/η ,
k=−ν
and
P̂y (l) =
ν
X
R̂y (k)e−j2πlk/η .
k=−ν
Therefore, J2,∞ also has the same set of global optima
as J2,1 and J2,2 .
Hence, to attain the global maximum of J2,1 , J2,2 and J2,∞ ,
there is also a condition that all the rows of Q have the same
1-norm. This implies G̃ is a global maximum of J2,1 , J2,2 and
J2,∞ if and only if it can be written in the form
Following
Q the similar steps as in [23] for the derivative
p
of log
m=1 R̂(om ) , the subgradient based iterative
algorithm for maximizing objective function (20) is provided as
W (i+1) (n) = W (i) (n)
X
ν
o
n
1
+ µ(i)
R P̂z (l)−1 Ŵ(i) (l)P̂y (l)ej2πnl/η
η
G̃ = kPΥ̃−1 diag(ρ).
where k is a non-zero value, ρ ∈ {−1, 1}p and P is a
permutation matrix which corresponds to a subset of perfect
separators defined by (13).
l=−ν
−
IV. I TERATIVE BCA A LGORITHMS
(20)
max
k∈{1,2,...,N }
l=−ν
(19)
l=−ν
q=max(0,−k)
where
In this section, we provide the adaptive algorithm corresponding to the optimization settings presented in the previous
section.
• Objective Function J1 (W̃ ):
In the adaptive implementation, we assume a set of finite
observations of mixtures {y(0), y(1), ..., y(N − 1)} and
modify the objective as
!
p
ν
X
Y
1
J¯1 (W̃ ) =
R̂(zm ) ,
log(det(P̂z (l))) − log
2η
m=1
z(q)z T (q + k),
for m = 1, 2, ..., p.
Note that the derivative of the first part of J¯1 (W̃ ) with
respect to W (n) is
Pν
1 ∂ l=−ν log(det(P̂z (l)))
=
2η
∂W(n)
ν
o
1 X n
(21)
R P̂z (l)−1 Ŵ(l)P̂y (l)ej2πnl/η ,
η
and Arithmetic-Geometric-Mean-Inequality yields
p
X
X
for k = −ν, ..., ν. We point out that we use R̂(z) for the
range vector of the sample outputs for which we have
(18)
Similarly, J2,2 has the same set of global maxima as J2,1 .
r = ∞ Case: Using the basic norm inequality, for any
a ∈ Rp ,
1
||a||∞ ≥ ||a||1 ,
p
||R(z)||p∞ ≥
min(ν,ν−k)
p
X
m=1
1
eTm R̂(z W(i) )
T max(i)
min(i)
) − y(lm
)
,
em y(lm
(22)
max(i)
lm
•
where µ(i) is the step-size at the ith iteration and
min(i)
(lm
) is the sample index for which the maximum
(minimum) value for the mth separator output is achieved
at the ith iteration.
Objective Function J2,r (W̃ ):
In the adaptive implementation, we modify the family of
alternative objective functions as
ν
1 X
J¯2,r (W̃ ) =
log(det(P̂z (l))) − log ||R̂(z)||pr
2η
l=−ν
(23)
7
For r = 1, 2, we can write the update equation as
W (i+1) (n) = W (i) (n)
X
ν
o
n
1
+ µ(i)
R P̂z (l)−1 Ŵ(i) (l)P̂y (l)ej2πnl/η −
η
l=−ν
p
T X pR̂m (z (i) )r−1
W
max(i)
min(i)
) − y(lm
)
.
em y(lm
r
m=1 ||R̂(z W(i) )||r
(24)
A. Complex Extension of the Convolutive BCA Optimization
Framework
We can extend the framework introduced in the Section III
to the complex signals by following similar steps with the
real vector z̀. We define the subset of R2p vectors which are
isomorphic to the elements of Z as
Z̀ = {z̀ : z ∈ Z}.
Similarly, we define
For r = ∞, the update equation has the form
S̀ =
W (i+1) (n) = W (i) (n)
X
ν
n
o
1
+ µ(i)
R P̂z (l)−1 Ŵ(i) (l)P̂y (l)ej2πnl/η −
η
{s̀ : s ∈ S},
Ỳ =
{ỳ : y ∈ Y }.
By these definitions, we modify the objective function J1 in
(1) for the complex case as
(i)
T
X
!
pβm
max(i)
min(i)
Z 1
2p
em y(lm
) − y(lm
)
Y
1 2
||R̂(z W(i) )||∞
log(det(Pz̀ (f )))df − log
R(z̀m ) .
Jc1 (W̃ ) =
m∈M(z W(i) )
2 − 21
m=1
(25)
(29)
Note that the mapping between Φ(s) and Φ(z) is given by
where M(z W(i) ) is the set of indexes for which the peak
Γ(Q), thus the theorem proved in Section III-B implies that
range value is achieved, i.e.,
the set of global maxima for the objective function (29) have
M(z W(i) ) = {m : R̂m (z W(i) ) = kR̂(z W(i) )k∞ }, (26) the properties that the corresponding Γ(G̃) satisfies (13) and
the structure imposed by (28). Therefore, the set of global
(i)
optima for (29) (in terms of G̃) is given by
and βm s are the convex combination coefficients.
l=−ν
=
GOc
D ∈ CpP ×pP is a full rank diagonal matrix with
V. E XTENSION TO C OMPLEX S IGNALS
In the complex domain, we consider p complex sources with
finite support, i.e., real and imaginary part of the sources have
finite support. We define the operator Φ : Cp → R2p ,
Φ(a) =
R{aT } I{aT }
T
{G̃ = PD : P ∈ Rp×pP is a permutation matrix,
(27)
as an isomorphism between p dimensional complex domain
and 2p dimensional real domain. For any complex vector a, we
introduce the corresponding isomorphic real vector as à, i.e.,
à = Φ{a}. We also define the operator Γ : Cp×q → R2p×2q
as
R{A} −I{A}
Γ(A) =
.
(28)
I{A} R{A}
In the complex domain, both mixing and separator coefficient matrices are complex matrices, i.e., H̃ ∈ Cq×pL and
W̃ ∈ Cp×qM . The set of source vectors S and the set of
separator outputs Z are subsets of Cp and the set of mixtures
Y is a subset of Cq . We also note that since
y(k) = G̃s̃(k),
we have
ỳ(k) = Γ(G̃)`s̃(k).
where Γ(G̃) = Γ(G(0)) Γ(G(1)) . . . Γ(G(P − 1))
T
and `s̃(k) = s̀(k) s̀(k − 1) . . . s̀(k − P + 1)
.
Dii = αi e
jπki
2
, αi ∈ R, ki ∈ Z, i = 1, . . . pM },
which corresponds to a subset of complex perfect separators
with discrete phase ambiguity.
In the adaptive implementation, we modify the objective as
!
2p
ν
Y
1 X
¯
Jc1 (W̃ ) =
R̂(z̀m ) .
log(det(P̂z̀ (l))) − log
2η
m=1
l=−ν
(30)
¯ 1 (W̃ ) with
Note that the derivative of the first part of Jc
respect to W (n) is
Pν
1 ∂ l=−ν log(det(P̂z̀ (l)))
= Λ11 + Λ22 + j(Λ21 − Λ12 ),
2η
∂W(n)
(31)
where we define
ν
o
1 X n
R P̂z̀ (l)−1 Γ(Ŵ)(l)P̂ỳ (l)ej2πnl/η
η
l=−ν
Λ11 Λ21
=
Λ11 , Λ12 , Λ21 , Λ22 ∈ Rp×q
Λ21 Λ22
where
Γ(Ŵ)(l) =
ν
X
k=−ν
Γ(W (k))e−j2πlk/η .
8
The corresponding iterative update equation for W(n) can
be written as
W(i+1) (n) = W(i) (n)
(i)
(i)
(i)
(i)
+ µ(i) Λ11 + Λ22 + j(Λ21 − Λ12 )
−
2p
X
m=1
1
eTm R̂(z̀ W(i) )
vm
and in the adaptive implementation by modifying these objective functions as
ν
1 X
¯
,
log(det(P̂z̀ (l))) − log ||R(z̀)||2p
Jc2,r (W̃ ) =
r
2η
l=−ν
(41)
H max(i)
min(i)
y(lm
) − y(lm
)
,
(32)
or alternatively,
ν
1 X
¯
.
Jca2,r (W̃ ) =
log(det(P̂z (l))) − log ||R(z̀)||2p
r
η
l=−ν
where we define
(42)
vm =
em
jem−p
m ≤ p,
m > p.
(33)
A variation on the approach considered for the complex
case can be obtained by observing that in the Jc1 objective
function
log(det(Pz̀ (f ))) = log |det(Γ(G)(f )Γ(Υ))|2 det(Ps̀ (f )) ,
(34)
PP −1
where Γ(G)(f ) = l=0 Γ(G(l))e−j2πf l . We also note that
|det(Γ(G)(f )Γ(Υ))| = |det(G(f )Υ)|2 .
(35)
Therefore, if we define an alternative objective function
!
Z 12
2p
Y
log(det(Pz (f )))df − log
R(z̀m ) ,
Jc1a (W̃ ) =
− 12
m=1
(36)
it would have the same set of global optima. In the adaptive
implementation, the modified objective will be as
!
2p
ν
X
Y
1
¯ 1a (W̃ ) =
Jc
R̂(z̀m ) .
log(det(P̂z (l))) − log
η
m=1
The update equation is similar to (32) where the derivative
of first part of (41) or (42) is given by either (31) or (38)
depending on the choice and the derivative of the second part
depends on the selection of r, e.g.,
• r = 1, 2 Case: In this case
∂log ||R(z̀)||2p
r
=
∂W(n)
2p
H
X
pR̂m (z̀ W(i) )r−1
max(i)
min(i)
) − y(lm
)
,
vm y(lm
r
m=1 ||R̂(z̀ W(i) )||r
(43)
•
where vm is as defined in (33).
r = ∞ Case: In this case
(i)
X
∂log ||R(z̀)||2p
pβm
r
=
∂W(n)
||R̂(z̀ W(i) )||∞
m∈M(z̀ W(i) )
H
max(i)
min(i)
) − y(lm
)
(44)
vm y(lm
where vm is as defined in (33),
l=−ν
(37)
The convenience of Jc1a is in terms of the simplified update
expression for (31), which results in the derivative of the first
¯ 1a (W̃ ) with respect to W (n) is
part of Jc
Pν
1 ∂ l=−ν log(det(P̂z (l)))
η
∂W(n)
ν
X
1
=
P̂z (l)−1 Ŵ(l)P̂y (l)ej2πnl/η .
(38)
η
l=−ν
Therefore, the corresponding iterative update equation for
W(n) in (32) is updated accordingly.
B. Complex Extension of the Alternative Objective Functions
Similar to the complex extension of J1 provided in the
previous subsection, we can extend the J2 family by defining
Z 1
1 2
,
log(det(Pz̀ (f )))df − log ||R(z̀)||2p
Jc2,r (W̃ ) =
r
2 − 21
(39)
or alternatively,
Jca2,r (W̃ ) =
Z
1
2
− 12
log(det(Pz (f )))df − log ||R(z̀)||2p
,
r
(40)
M(z̀ W(i) ) = {m : R̂m (z̀ W(i) ) = kR̂(z̀ W(i) )k∞ }, (45)
(i)
and βm s are the convex combination coefficients.
VI. N UMERICAL E XAMPLES
In this section, we illustrate the separation capability of
the proposed algorithms for the convolutive mixtures of both
independent and dependent sources.
A. Separation of Space-Time Correlated Sources
We first consider the following scenario to illustrate the
performance of the proposed algorithms regarding the separability of convolutive mixtures of space-time correlated sources:
In order to generate space-time correlated sources, we first
generate a samples of a τ p size vector, d, with Copulat distribution in [30], a perfect tool for generating vectors
with controlled correlation, with 4 degrees of freedom whose
correlation matrix parameter is given by R = Rt ⊗ Rs
is a Toeplitz
matrix whose first row is
where Rt (Rs ) τ −1
( 1 ρs . . . ρp−1
) (Note that
1 ρt . . . ρt
s
the Copula-t distribution is obtained from the corresponding
t-distribution through the mapping of each component using the corresponding marginal cumulative distribution functions, which leads to uniform marginals [30]). Each sample of d is partitioned to produce source vectors, d(k) =
9
45
40
35
MMSE (ρt = 0)
30
BCA (J¯1, ρt = 0)
25
BCA (J¯2,1 , ρt = 0)
BCA (J¯1, ρt = 0.5)
BCA (J¯2,∞ , ρt = 0)
20
KurtosisMax. of [31]
Signal to Interference-plus-Noise Ratio (dB)
16
14
12
10
BCA (J¯1, ρt = 0)
6
BCA (J¯2,1 , ρt = 0)
BCA (J¯2,∞ , ρt = 0)
4
KurtosisMax. of [31]
2
0
0
Alg.2 of [32]
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Correlation Coefficient ρs
5
4
3
2
MMSE
BCA (J¯1)
1
BCA (J¯2,1 )
BCA (J¯2,2 )
0
−2
0
10
MMSE (ρt = 0)
8
−1
Alg.2 of [32]
15
18
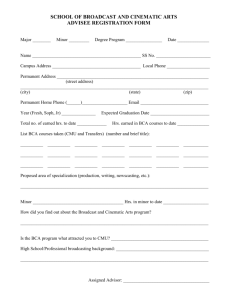
Fig. 3. Dependent convolutive mixtures separation performance results for
SNR = 20dB.
Signal to Interference-plus-Noise Ratio (dB)
s(kτ ) s(kτ + 1) . . . s((k + 1)τ − 1) . Therefore, we
obtain the source vectors as samples of a wide-sense cyclostationary1 process whose correlation structure in time direction
and space directions are governed by the parameters ρt and
ρs , respectively.
In the simulations, we considered a scenario with 3 sources
and 5 mixtures, an i.i.d. Gaussian convolutive mixing system
with order 3 and a separator of order 10. At each run, we
generate 50000 source vectors where τ is set as 5. The results
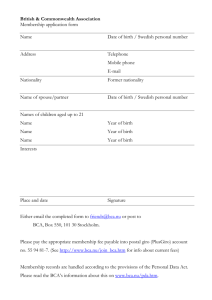
are computed and averaged over 500 realizations.
Figure 2 shows the output total Signal energy to total
Interference+Noise energy (over all outputs) Ratio (SINR)
obtained for the proposed BCA algorithms (J¯1 , J¯2,1 , J¯2,∞ )
for various space and time correlation parameters under 45dB
SNR. SINR performance of Minimum Mean Square Error
(MMSE) filter of the same order, which uses full information
about mixing system and source/noise statistics, is also shown
to evaluate the relative success of the proposed approach. A
comparison has also been made with a gradient maximization
of the criterion (kurtosis) of [31] (KurtosisMax.) and Alg.2
of [32] where we take kmax = 50 and lmax = 20. We have
obtained these methods from [1], [33].
Signal to Interference-plus-Noise Ratio (dB)
BCA (J¯2,∞ )
KurtosisMax. of [31]
Alg.2 of [32]
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Correlation Coefficient ρs
5
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Fig. 4. Dependent convolutive mixtures separation performance results for
SNR=5dB.
Correlation Coefficient ρs
Fig. 2. Dependent convolutive mixtures separation performance results for
SNR = 45dB.
For the same setup, Figure 3 shows the output total Signal
energy to total Interference+Noise energy (over all outputs)
Ratio (SINR) obtained for the proposed BCA algorithms
(J¯1 , J¯2,1 , J¯2,∞ ), gradient maximization of the criterion (kurtosis) of [31] (KurtosisMax.), Alg.2 of [32], and MMSE for
various space correlation parameters under 20dB SNR.
In Figure 4, we provide the output total Signal energy to total Interference+Noise energy (over all outputs)
Ratio (SINR) obtained for the proposed BCA algorithms
(J¯1 , J¯2,1 , J¯2,2 , J¯2,∞ ), gradient maximization of the criterion
(kurtosis) of [31] (KurtosisMax.), Alg.2 of [32], and MMSE
for various space correlation parameters under 5dB SNR.
These results demonstrate that the performance of proposed
algorithms closely follows its MMSE counterpart for a wide
range of correlation values. Therefore, we obtain a convolutive
extension of the BCA approach introduced in [23], which
is capable of separating convolutive mixtures of space-time
correlated sources.
We also point out that the proposed BCA approaches maintains high separation performance for various space and time
correlation parameters. On the other hand, the performance
of gradient maximization of the criterion (kurtosis) of [31]
(KurtosisMax.) and Alg.2 of [32] degrades substantially with
increasing correlation, since in the correlated case, independence assumption simply fails.
B. MIMO Blind Equalization
1 This
actually violates the stationarity assumption on sources when ρt 6= 0.
However, we still use this as a convenient method to generate space-time
correlated sources
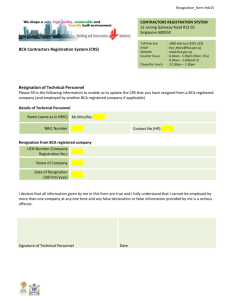
We next consider the following scenario to illustrate the performance of the proposed method for the convolutive mixtures
10
of digital communication sources. We consider 3 complex
QAM sources such that 2 sources are 16-QAM signals and 1
source is 4-QAM signal. We take 5 mixtures, an i.i.d. Gaussian
convolutive mixing system with order 3 and a separator of
order 10. The results are computed and averaged over 500
¯ 1 , Jc
¯ 2,1 and
realizations. We use the objective functions Jc
¯
Jc2,2 as the BCA algorithms introduced in Section V for this
simulation. The resulting Signal to Interference Ratio is plotted
with respect to the sample lengths in Figure 5. We have also
compared our algorithms with a gradient maximization of the
criterion (kurtosis) of [31] (KurtosisMax.) and Alg.2 of [32].
According to Figure 5, the proposed BCA approaches
achieve better performance than ICA based approaches. As
it is mentioned earlier, the proposed method does not assume/exploit statistical independence. The only impact of
short data length is on accurate representation of source box
boundaries. The simulation results suggest that the shorter
data records may not be sufficient to reflect the stochastic
independence of the sources, and therefore, the compared
algorithms require more data samples to achieve the same SIR
level as the proposed approach.
the sources are bounded and satisfy domain separability
assumption.
• Even though the source samples may be drawn from a
stochastic setting where they are mutually independent,
especially for short data records, the estimation of sources
based on domain separability is expected to be more
robust than the estimation based on the independence
feature. As illustrated in the previous section, this feature results in superior separation performances, relative
to some state of the art Convolutive ICA methods, in
convolutive MIMO equalization problem, which is more
pronounced especially for shorter packet sizes.
We note that the dimension of the extended vector of sources
(s̃) increases with the order of the overall system and with the
number of sources. This implies that the proposed convolutive
BCA approaches’ performances will depend on the sample
length as the order of the convolutive system and/or the
number of sources increase. We finally note that for the
applications where the sources have tailed distributions, the
performances of the proposed convolutive BCA algorithms are
likely to suffer, which can be considered as one drawback of
the algorithms.
Signal to Interference Ratio (dB)
70
A PPENDIX
60
BCA (J¯c1)
50
BCA (J¯c2,1 )
BCA (J¯c2,2 )
40
KurtosisMax. of [31]
Alg.2 of [32]
30
20
10
0
0
1000
2000
3000
4000
5000
6000
7000
8000
9000 10000
Sample Length
Fig. 5.
Signal to Interference Ratio as a function of Sample Length
VII. C ONCLUSION
In this article, we introduce an algorithmic framework for
the convolutive Bounded Component Analysis problem. The
utility of the proposed algorithms are mainly twofold:
• The proposed algorithms are capable of separating not
only independent sources but also dependent, even correlated sources. The dependence/correlation is allowed to
be in both source (or space) and in sample (or time)
directions. The proposed framework’s capability in terms
of separating space-time correlated sources (as well as
independent sources) from their convolutive mixtures favors it as a widely applicable approach under the practical
constraint on the boundedness of sources. In fact the
proposed approach can be considered as a more general
convolutive approach than ICA with additional dependent
source separation capability, under the condition that
In this appendix, we provide an essential summary of the
geometric BCA approach introduced in [23]. We first start with
the definitions of two geometric objects used by this approach:
• Principal Hyperellipsoid is the hyperellipse whose principal semi-axis directions are determined by the eigenvectors of the covariance matrix and whose principal semiaxis lengths are equal to principal standard deviations,
i.e., the square roots of the eigenvalues of the covariance
matrix.
• Bounding Hyperrectangle corresponds to the box defined by the Cartesian product of the support sets of the
individual components. This can be also defined as the
minimum volume box containing all samples and aligning
with the coordinate axes.
An example, for a case of 3-sources to enable 3D picture, is
provided in Figure 5. In this figure, a realization of separator
output samples and the corresponding bounding hyperrectangle and principal hyper-ellipsoid are shown.
The separation problem is posed as maximization of the
relative sizes of these objects. An example to the optimization
setting of this approach could be given as:
p
det(Rz )
Qp
.
(46)
maximize
m=1 R(zm )
Note that the numerator of (46) is the (scaled) volume of the
principal hyperellipse, whereas the denominator is the volume
of the bounding hyperrectangle for the output vectors.
The principal hyperellipsoid in the output domain is the
image (with respect to the instantaneous overall mapping
defined as G) of the principal hyper-ellipsoid in the source
domain. We note that the instantaneous overall mapping causes
|det(G)| scaling in the volume of principal hyperellipsoid.
However, the image of the bounding hyperrectangle in the
11
Fig. 6.
Bounding Hyper-rectangle and Principal Hyper-ellipsoid
source domain is a hyperparallelopiped which is a subset of
the bounding hyperrectangle in the output domain. Hence, the
volume scaling for the source and separator output bounding
boxes is more than or equal to |det(G)|. As an important
observation, for the latter, the scaling would be |det(G)| if
and only if G is a perfect separator matrix. We observe this
by simple geometrical reasoning that the bounding box in the
source domain is mapped to another hyper-rectangle (aligning
with coordinate axes) if and only if G can be written as
G = DP , where D is a diagonal matrix with non-zero
diagonal entries, and P is a permutation matrix. The set of
such G matrices is referred as Perfect Separators. Therefore,
the optimization setting given as an example provides Perfect
Separators.
R EFERENCES
[1] P. Comon and C. Jutten, Handbook of Blind Source Separation: Independent Component Analysis and Applications. Academic Press, 2010.
[2] A. Hyvärinen, J. Karhunen, and E. Oja, Independent Component Analysis. John Wiley and Sons Inc., 2001.
[3] P. Comon, “Independent component analysis, A new concept?,” Signal
Processing, vol. 36, pp. 287–314, Apr. 1994.
[4] A. Belouchrani, K. Abed-Meraim, J.-F. Cardoso, and E. Moulines, “A
blind source separation technique using second-order statistics,” IEEE
Trans. on Signal Processing, vol. 45, no. 2, pp. 434–444, Feb. 1997.
[5] M. Matsuoka, M. Ohaya, and M. Kawamoto, “A neural net for blind
separation of nonstationary signals,” Neural Networks, vol. 8, no. 3, pp.
411–419, Mar. 1995.
[6] P. Georgiev, F. Theis, and A. Cichocki, “Sparse component analysis and
blind source separation of underdetermined mixtures,” IEEE Trans. on
Neural Networks, vol. 16, no. 4, pp. 992–996, Jul. 2005.
[7] A. J. van der Veen and A. Paulraj, “An analytical constant modulus
algorithm,” IEEE Trans. on Signal Processing, vol. 44, no. 5, pp. 1136–
1155, May 1996.
[8] P. Jallon, A. Chevreuil, and P. Loubaton, “Separation of digital communication mixtures with the CMA: Case of unknown symbol rates,”
Signal Processing, vol. 90, no. 9, pp. 2633–2647, Sep. 2010.
[9] S. Talwar, M. Viberg, and A. Paulraj, “Blind separation of synchronous
co-channel digital signals using an antenna array. I. algorithms,” IEEE
Trans. on Signal Processing, vol. 44, no. 5, pp. 1184–1197, May 1996.
[10] D.-T. Pham, “Blind separation of instantenaous mixtrures of sources
based on order statistics,” IEEE Trans. on Signal Processing, vol. 48,
pp. 363–375, Feb. 2000.
[11] S. Cruces and I. Duran, “The minimum support criterion for blind source
extraction: a limiting case of the strenthened young’s inequality,” Lecture
Notes in Computer Science, pp. 57–64, Sep. 2004.
[12] F. Vrins, M. Verleysen, and C. Jutten, “SWM: A class of convex
contrasts for source separation,” in Proceedings of IEEE ICASSP 2005,
Philadelphia, PA, Mar. 2005, pp. 161–164.
[13] F. Vrins, J. A. Lee, and M. Verleysen, “A minimum-range approach to
blind extraction of bounded sources,” IEEE Trans. on Neural Networks,
vol. 18, no. 3, pp. 809–822, May 2007.
[14] F. Vrins and D. Pham, “Minimum range approach to blind partial
simultaneous separation of bounded sources: Contrast and discriminacy
properties,” Neurocomputing, vol. 70, pp. 1207–1214, Mar. 2007.
[15] S. Vembu, S. Verdu, R. Kennedy, and W. Sethares, “Convex cost
functions in blind equalization,” IEEE Trans. on Signal Processing,
vol. 42, pp. 1952–1960, Aug. 1994.
[16] A. T. Erdogan and C. Kizilkale, “Fast and low complexity blind equalization via subgradient projections,” IEEE Trans. on Signal Processing,
vol. 53, pp. 2513–2524, Jul. 2005.
[17] A. T. Erdogan, “A simple geometric blind source separation method for
bounded magnitude sources,” IEEE Trans. on Signal Processing, vol. 54,
pp. 438–449, Feb. 2006.
[18] A. T. Erdogan, “Globally convergent deflationary instantaneous blind
source separation algorithm for digital communication signals,” IEEE
Trans. on Signal Processing, vol. 55, no. 5, pp. 2182–2192, May 2007.
[19] A. T. Erdogan, “Adaptive algorithm for the blind separation of sources
with finite support,” in Proceedings of EUSIPCO 2008, Lausanne, Aug.
2008.
[20] S. Cruces, “Bounded component analysis of linear mixtures: A criterion
for minimum convex perimeter,” IEEE Trans. on Signal Processing,
vol. 58, no. 4, pp. 2141–2154, Apr. 2010.
[21] P. Aguilera, S. Cruces, I. Duran, A. Sarmiento, and D. Mandic, “Blind
separation of dependent sources with a bounded component analysis
deflationary algorithm,” IEEE Signal Processing Letters, vol. 20, no. 7,
pp. 709–712, Jul. 2013.
[22] A. T. Erdogan, “On the convergence of symmetrically orthogonalized
bounded component analysis algorithms for uncorrelated source separation,” IEEE Trans. on Signal Processing, vol. 60, no. 11, pp. 6058–6063,
Nov. 2012.
[23] A. T. Erdogan, “A family of bounded component analysis algorithms,”
in IEEE International Conference on Acoustics, Speech and Signal
Processing, Kyoto, Mar. 2012, pp. 1881–1884.
[24] H. A. Inan and A. T. Erdogan, “A bounded component analysis approach
for the separation of convolutive mixtures of dependent and independent
sources,” in IEEE International Conference on Acoustics, Speech and
Signal Processing, Vancouver, BC, May 2013, pp. 3223–3227.
[25] Y. Inouye and R.-W. Liu, “A system-theoretic foundation for blind
equalization of an FIR MIMO channel system,” IEEE Trans. on CAS-I:
Fund. Th. and Apps., vol. 49, no. 4, pp. 425–436, Apr. 2002.
[26] T. Mei, J. Xi, F. Yin, A. Mertins, and J. F. Chicharo, “Blind source
separation based on time-domain optimization of a frequency-domain
independence criterion,” IEEE Trans. on Audio, Speech, and Language
Processing, vol. 14, no. 6, pp. 2075–2085, Nov. 2006.
[27] T. Mei, A. Mertins, F. Yin, J. Xi, and J. F. Chicharo, “Blind source
separation for convolutive mixtures based on the joint diagonalization
of power spectral density matrices,” Signal Processing , vol. 88, no. 8,
pp. 1990–2007, Aug. 2008.
[28] D. Garling, Inequalities: A Journey into Linear Analysis. Cambridge
University Press, 2007.
[29] W. Rudin, Real and Complex Analysis. McGraw-Hill Book Co., 1987.
[30] S. Demarta and A. J. McNeil, “The t copula and related copulas,”
International Statistical Review, vol. 73, no. 1, pp. 111–129, Jan. 2005.
[31] C. Simon, P. Loubaton, and C. Jutten, “Separation of a class of
convolutive mixtures: a contrast function approach,” Signal Processing,
vol. 81, no. 4, pp. 883 – 887, 2001.
[32] M. Castella and E. Moreau, “New kurtosis optimization schemes for
MISO equalization,” IEEE Trans. on Signal Processing, vol. 60, no. 3,
pp. 1319–1330, 2012.
[33] P. Jallon, M. Castella, and R. Dubroca, “Matlab toolbox for separation
of convolutive mixtures,” Available: http://www-public.int-evry.fr/
∼castella/toolbox/