as a PDF
advertisement

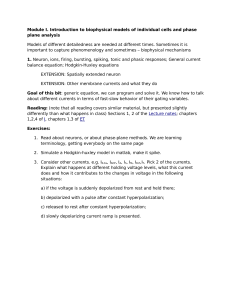
Design and Implementation of a New Control Algorithm for a Three-Phase Active Filter Bhim Singh Kamal Al-Haddad, Ambrish Chandra and R. Parimelalagan Electrical Eng. Dept. Indian Institute of Technology Hauz Khas, New Delhi 110016 INDIA GREPCI, Electrical Eng. Dept. Ecole de technologie superieure 4750, av. Henri-Mien, Montreal (Quebec) H2T2C8 CANADA Abstract — This paper presents a new control scheme of voltage source active filter (AF) which compensates simultaneously the harmonics and reactive power of non-linear loads. The reference compensating currents are estimated from computed reference supply currents and sensed load currents. Reference supply currents are estimated using active power of the load and the AF. A hysteresis or carrier based PWM current control is employed to generate the gating signals to the devices of the AF. A three-phase diode rectifier with capacitive resistive loading is used as a non-linear load. Experimental results of a DSP based prototype are presented to confirm the effectiveness of the new control scheme. I. INTRODUCTION Solid state power converters are widely used in applications such as adjustable speed drives (ASD), static power supplies and asynchronous ac-dc links in wind and wave generating systems. These power converters behave as non-linear loads to ac mains and inject harmonics and result in lower powerfactor and efficiency of the power system. Conventionally, passive filters were the choice for the elimination of harmonics and to improve power-factor. These passive filters have the disadvantages of large size, resonance, and fixed compensation. In the last couple of decades, the concept of active filters (AF) has been introduced and many publications have appeared on this subject [1-14]. Several approaches, such as, hybrid filters and multistep inverters are reported to reduce the size of active filters [14]. Many control concepts, such as instantaneous power theory [5, 10, 11, 14], notch filters [12], and flux based controllers [13] have also been introduced. Most of these control schemes require various transformations and are difficult to implement. This paper presents a simple algorithm to achieve the control for AF. In a shunt AF, the main objective is to maintain sinusoidal unity power-factor supply currents to feed active power to the load and to meet the losses in the AF. These two components of active power can be computed from load currents, dc bus voltage and supply voltages. From the measured active power required by the system and the estimated losses in the AF, reference unity power-factor supply cuirents are derived. By subtracting load currents from these reference supply currents, compensating currents of the AF phases are obtained. In this paper, the numerical simulation results, to illustrate the effectiveness of the new algorithm, are presented 193 along with the experimental results, obtained from a laboratory size AF setup, using DSP based hardware. II. SYSTEM CONFIGURATION AND CONTROL SCHEME The block diagram of the parallel AF is shown in Fig. 1. The AF is composed of a standard three-phase voltage source inverter bridge with a dc bus capacitor to provide an effective current control. A hysteresis PWM current control is employed to give fast response of the AF. The non-linear load is a dc resistive load supplied by three-phase uncontrolled bridge rectifier with an input impedance and dc capacitor on the output. Due to capacitive loading the uncontrolled bridge rectifier draws non sinusoidal pulsating currents from ac source. Depending upon the load magnitude and its parameters it also draws reactive power from the mains. The basic function of the proposed parallel AF is to eliminate harmonics and meet the reactive power requirements of the load locally so that the ac supply feeds only the sinusoidal balanced unity power factor currents. The desired AF currents are estimated by sensing the load current, dc bus voltage, and source voltage. The hysteresis current controller generates the switching signals to AF devices to force the desired currents into the AF phases. With this control feature, the AF meets harmonic and reactive current requirements of the load. The AF connected in shunt with the load, also enhances the system efficiency as the source does not process harmonic and reactive power. Fig. 2 shows the proposed control scheme of die shunt AF. The ac source feeds fundamental active power component of load currents and another fundamental component of current to maintain the average capacitor voltage to a desired value. This latter component of source current is to feed the losses in the converter such as switching loss, ohmic loss, capacitor leakage loss, etc. in the steady state and to maintain the stored energy on the dc bus during transient conditions such as sudden fluctuations of load etc. This component of source current (l s m d) is computed using dc bus capacitor value (Cd c ), average voltage on dc bus (v^ca) and a chosen reference voltage of the dc bus ( v ^ j . The fundamental Nonlinear Load 3-Phase AC Mains fc Ml 1 Active Filter Fig. 1. Basic Circuit of Active Filter active power component of the load currents (I sm p) is in. DSP BASED IMPLEMENTATION OF AF CONTROL computed using sensed load currents and voltages. The total reference source peak current l l s m ) is computed using Description of Experimental Hardware components I smc i and I s n i p. The reference instantaneous The non-linear load consists of a three-phase rectifier bridge with R-C loading on the dc side. The AF bridge is made up of six IGBTs connected in a VSI structure. The main capacitor is connected on the dc side of this bridge. The three-phase terminals of the AF bridge as well as the rectifier load bridge are connected to the three-phase three-wire ac mains through series R-L elements. (* * * \ i s a , isb andi s c l are computed using their peak value ( l s m ) and unit current templates (u sa , us(j and u s c ) derived from sensed source voltages. The command (* * * \ i c a , i c b and i c c I are computed by taking the difference between instantaneous source reference i s a , i s b and i s c ) and sensed load currents (iT_a, JLb and iL c ). The hysteresis rule based carrierless PWM current controller is employed over the reference AF currents Ii c a , i c b and i c c I and sensed AF currents (i ca , icb and icC) to obtain the gating signals to the devices of the AF. The devices of the AF are considered ideal. The value of AF inductance (Lc) is selected on the basis of proper shaping of compensating currents. With higher value of L c , compensating currents do not track reference currents and if a lower value of Lc is chosen, there are large ripples in compensating currents. The AF meets the requirements of harmonic and reactive components of load currents locally, resulting in sinusoidal unity power factor source currents under varying operating conditions of the system. Description of the DSP System The DSP system [15] is based on the TMS320C31 signal processor. Eight channels of 12-bit AD converters and eight channels of 12-bit DA converters are integrated with the DSP controller. The system also includes three hardware interrupt channels. A host computer is used to download the software code to the DSP system through a serial port. Details of Controller Algorithm The block diagram of the control scheme is shown in Fig. 3. The important functions of the software routine are the following: (i) 194 From the input signals compute the instantaneous power drawn by the load and accumulate the total energy consumed in a 60 degree interval of the ac cycle. v v trr Compute Source Current Component to Recover Energy Storage on dc Bus sa sb v sc Compute Source Reference Currents £f tof Compute Source Active Component of Current using Averaged of Instantaneous Active Load Power over Regular Pulse Interval Compute Command AF Currents Tmp Hysteresis Based Current Controller Hating Signals Vdc AF >cb' AC Source 'sc JLc >Lb 'La Nonlinear Load Fig. 2. Control Scheme of the Three-Phase Active Filter as Implemented by the DSP (ii) From the dc bus voltage signal, compute the energy stored in the dc bus capacitor during a sixth of the ac cycle. (iii) On receipt of a zero crossing interrupt signal compute the peak value of the supply reference currents, to be used in the next 60 degree duration, using the new algorithm. (iv) During each looping time, read the load currents and using the supply current template values calculated, output the reference current values to the controllers, which drive the AF bridge. Aedc= 2 (3) The total peak source current from equations (1) and (3) is: (4) The operation of the AF controller is summarized by equations (1) to (4). Input Signals to the DSP Controllers Basic Equations used in the Algorithm If the instantaneous load power is averaged over one sixth the period (T x ), of the supply frequency, the average power can be expressed as: PS=(3/2)V s m I* m p (1) The energy difference corresponding to the assumed APF dc bus voltage V^ and the measured average dc bus voltage V(j ca over the interval T x , is: Aedc=Cdc (2) A total of seven analog signals are fed to the DSP system. The dc bus voltage of the APF and the three ac phase voltages are the four voltage signals used. The dc bus voltage is given by an isolation amplifier (AD202) and scaling circuits. The ac voltages are obtained using potential transformers. The three load currents are obtained from Hall effect current transducers. All the scaling circuits are designed to match the signal range of the ADC units in the system. The only digital signal fed to the DSP system is for ac mains synchronization. The six zero crossing pulses in each ac cycle are obtained from the three-phase voltages at positive and negative zero crossings. These signals are combined using logic gates to get a pulse train with six times the mains frequency and fed to an interrupt input of the DSP controller. The AF is controlled so as to draw this energy difference Ae^c from the ac mains through unity power factor current Output Signals from the DSP Controller with a peak value of I sm d over the same interval T x . This energy relationship can be expressed as Using the seven input signals and the zero crossing pulses the software implements the algorithm to control the AF. The AF bridge driver pulses are not directly generated by the 195 DSP. A separate hardware controller is used to generate the gate pulses. The DSP provides the reference current signals to the three PWM controllers using the new algorithm developed. Serial Interface v DSP-TMS320C31 Board sa Vsb v Host IBM PC \ sc VWWw 'La JLb 'Lc / Digital Controller —*— dc v 8 Channels DAC 'ca 1 let fca PWM Current Controller APF AC Mains f 50 Time (mSec) Fig. 4. Simulated Performance of the AF System under Load Changefrom8kWtol8kW Fig. 3. Hardware Block Diagram of Digital Controller 30 IV. SIMULATED PERFORMANCE OF AF SYSTEM Simulated performance characteristics of the AF system with proposed control scheme are given in Figs. 4-7 illustrating the steady state and transient behavior at different loads. The parameters of the system studied are given in the Appendix. Fig. 4 shows the source voltage, three-phase currents, load current, AF current and dc bus voltage when an extra load of 10 kW is added after two cycles. The source currents respond very quickly and settle to steady state value within a cycle. The AF current increases almost instantaneously to feed the increased load current demand by taking the energy instantaneously from dc bus capacitor. DC bus capacitor voltage recovers within a cycle. Source currents always remain sinusoidal and lower than the load currents. Load current changes from discontinuous to continuous from with increased load. The active power supplied from source changes from 8 kW to 18 kW. The sixth harmonic voltage ripple is observed in dc bus voltage and its magnitude varies well within 2 % of the reference value. Fig. 6 shows similar results as in Fig. 4 for sudden decrease of load. The active power supplied from source is decreased form 18 kW to 8 kW. Source currents settle to steady state value within a cycle demonstrating the excellent transient response of the AF. DC bus voltage rises only to 481 V but reaches the steady state value within a cycle. Load current changes from (a) !20 10 10 40 20 Order K 30 40 (b) 30 I 20 10 10 20 Order K 30 40 Fig. 5 Harmonic Spectra of (a) Load Current (8 kW) (b) Supply Current (8 kW) 196 reactive components of load current and maintains the source currents sinusoidal in transient and steady state conditions. Fig. 5 shows the harmonic spectra of the load and the source currents at light load (8 kW) and Fig. 7 shows the harmonic spectra of the currents at 18 kW load conditions. It may be observed from the harmonic spectra of Figs. 5(a) and 7(a) that the dominent harmonics in load currents are of order below 30th and the AF is found effective to eliminate them. The THD of source current is reduced from 105 % to 2.07 % under light load (8 kW) and from 53 % to 1.07 % during heavy load (18 kW). The AF is quite effective to reduce the THD well below the specified 5 % limit of standard IEEE519. The performance of the proposed control algorithm of the AF is found to be excellent and the source current is practically sinusoidal and in phase with the source voltage. The fast response of the AF ensures that the AF is not overburdened during transient conditions. The voltage ripple is quite small in dc bus capacitor voltage and may be reduced further by increasing the capacitor value. Surge in dc bus voltage is observed to be ± 8 % during transients which may be controlled by the design to a lower value but at the expense of increased value of source currents during transients. However, this surge in dc bus voltage reduces with increased value of bus capacitor. [450 / V W W A A A / W / ^ ^ ^ 400 50 Tims (mSec) 100 V. EXPERIMENTAL RESULTS AND DISCUSSIONS Fig. 6. Simulated Performance of the AF System under Load Change from 18 kW to 8 kW The experimental waveforms obtained from the laboratory setup are shown in Fig. 8, corresponding to load power level of 520 watt. Fig 8(a) shows the current drawn by the load and the source voltage for this loading condition. In the uncompensated system, the current drawn by the load is the same as the source current. Fig. 8(b) shows the source current and the source voltage in the compensated system under the same loading condition. The AF has made the supply current nearly sinusoidal and to be in phase with the voltage. (a) 60 40 •20 10 20 Order K 30 40 10 20 Order K 30 40 60 The hysteresis based current control and the carrier based PWM current control are possible in the laboratory setup. The carrier based PWM control offers a fixed switching rate for the semiconductor devices. In the digital simulation studies, a step time of 2 micro seconds was used. The simulation assumes ideal switching elements and transducers. However, the hardware setup was found to be much slower in response, because of the speed limitations of the data converters and software looping time. This explains the differences in the quality of the simulation and experimental waveforms. For practical reasons, the power level of the experimental set up has been kept low and all the measurements were taken for a power levl of around 500 VA. The suitability of the proposed control strategy is confirmed by the studies presented. [40 •20 0 Fig. 7. Harmonic Spectra of (a) Load Current (18 kW) (b) Supply Current (18 kW) continuous to discontinuous form. Source currents remain always less than the load currents under all operating conditions. The AF meets the requirements of harmonic and 197 Experimental System Parameters: |Supply Voltgge (g) Vs (rms/phase) = 70 V, F = 60 Hz, Rc = 0.1 ohm, L c = 3 mH, C L = 650 |XF, Rs = 0.05 ohm, L s = 22 mH, C d c = 3000 |XF. U REFERENCES [1] [2] [3] [4] [5] [6] [7] Fig. 8. Experimental Results from AF Setup (520 watts) (a) Load Current (2.5A/div) and Supply Voltage (20V/div); (b) Supply Current (2.5A/div) and Supply Voltage (20V/div). [8] VI. CONCLUSIONS [9] This paper demonstrates the validation of a simpler control approach for the parallel active power filter by using simulation studies and a DSP based laboratory setup. The AF is observed to eliminate the harmonic and reactive components of load current resulting in sinusoidal and unity power-factor source currents. It is observed that the source current remains in the same level as the load current even during transient conditions. The AF enhances the system efficiency because the source need not process the harmonic and reactive power demanded by the load. The details of the DSP based setup presented in this paper will be of interest to field engineers and AF manufacturers. [10] [11] [12] [13] APPENDIX [14] Simulated System Parameters : R c = 0.1 ohm, Vs (rms/phase) = 127 V, F = 60 Hz, L c = 0.3 mH, C L = 330 |xF, Rs = 0.01 ohm, Ls = 0.25 mH, C dc = 1500 \iF. [15] 198 H. Sasaki and T. Machida, "A New Method to Eliminate AC Harmonic Currents by Magnetic Flux CompensationConsiderations on Basic Design", IEEE Trans, on Power Apparatus and Systems, Vol. PAS-90, No 5, 1971, pp. 20092019. L. Gyugyi and E.C. Strycula, "Active AC Power Filters", IEEE-IAS Annual Meeting Record, 1976, pp. 529-535. A. Ametani, "Hamonic Reduction in Thyristor Converters by Harmonic Current Injection", IEEE Trans, on Power Apparatus and Systems, Vol. PAS-95, No 2, March/April 1976, pp. 441-449. N. Mohan, H.A. Peterson, W.F. Long, G.R. Dreifuerst and J.J. Vithayathil, "Active Filters for AC Harmonic Suppression", IEEE/PES Winter Meeting, 1977, pp. 168-174. H. Akagi, Y. Kanazawa and A. Nabae, "Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components", IEEE Transactions on Industry Applications, Vol. IA-20, No. 3, May/June 1984, pp. 625-630. C. Wong, N. Mohan, S.E. Wright and K.N. Mortensen, "Feasibility Study of AC- and DC-Side Active Filters for HVDC Converter Terminals", IEEE Trans, on Power Delivery, Vol. 4, No 4, October 1989, pp. 2067-2075. W.M. Grady, M.J. Samotyj and A.H. Noyola, "Survey of Active Power Line Conditioning Methodologies", IEEE Trans, on Power Delivery, Vol. 5, No 3, July 1990, pp. 15361542. W.M. Grady, M.J. Samotyj and A.H. Noyola, "Minimizing Network Harmonic Voltage Distortion with an Active Power Line Conditioner", IEEE Trans. Power Delivery, Vol. 6, 1991, pp. 1690-1697. A.E. Emanuel and M. Yang, "On the Harmonic Compensation in Non Sinusoidal Systems", IEEE Trans, on Power Delivery, Vol. 8, No 1, January 1993, pp. 393-399. H. Akagi and H. Fujita, "A New Power Line conditioner for Harmonic Compensation in Power Systems", IEEE Trans, on Power Delivery, Vol. 10, No 3, July 1995, pp. 1570-1575. M. Aredes and E.H. Watanabe, "New Control Algorithms for Series and Shunt Three-Phase Four-Wire Active Power Filters", IEEE Trans, on Power Delivery, Vol. 10, No 3, July 1995, pp. 1649-1656. M. Rastogi, N. Mohan and, A.A. Edris, "Hybrid-Active Filtering of Harmonic Currents in Power Systems", IEEE Transactions on Power Delivery, Vol. 10, No. 4, October 1995, pp. 1994-2000. S. Bhattacharya, A. Veltman, D.M. Divan and R.D. Lorenz, "Flux Based Active Filter Controller", IEEE-IAS Annual Meeting Record, 1995, pp.2483-2491. H. Akagi, "New Trends in Active Filters for Improving Power Quality", IEEE-PEDES Conference Record, January 1996, pp. 417-425. MX31 Modular Embedded System Developers Guide, Integrated Motions Incorporated, California, 1992.