Nyquist Stability Analysis: Gain & Phase Margins
advertisement

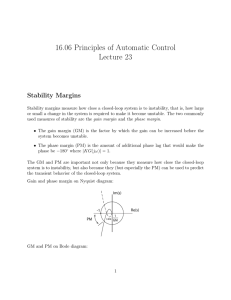
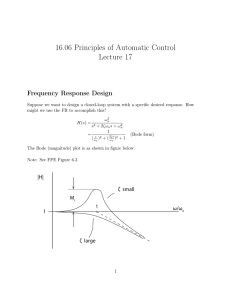
Figure 10.35 Nyquist diagram showing gain and phase margins 1. Gain Margin, GM, and Phase Margin, PΜ, indicate the Relative Stability of the closed-loop system. 2. We assume that the system is a Non-minimum Phase system (no GH zeros in the RHP). 3. If all the poles of GH are in the LHP, then we can just II plot the positive jω axis (Part I)&to determine stability using the GM and PM; otherwise, stability needs to be determined first using the Nyquist criterion, Z = P - N. 4. GM 1 where the Angle of GH = ± 180o GH |GH| = 1/a a = 1/ |GH| =GM Arg(GH)= ± 180o 1 =-20log( GH ) GH for Bode plots, GM=20log o PM +180 + Angle of GH where GH = 1 5. If we multiply GH by GM, the Nyquist plots shifts to where it crosses –1 on the real axis and the system becomes marginally stable. That is, as the GM approaches 1, the system becomes more oscillatory. The GM is less than 1 and positive for stability, i.e., |GH| real-axis crossing is less than 1 for stability. 6. For stability, the PM must be positive. As the PM approaches 0 degrees, the system becomes more oscillatory. in dB GM Ogata, Modern Control Engineering, 3rd Edition -1 CONDITIONALLY STABLE MAY BECOME UNSTABLE WITH A SLIGHT GAIN CHANGE α = PM Highest Frequency Figure 10.37 Gain and phase margins on the Bode diagrams IT IS MUCH EASIER TO FIND THE GM AND PM FROM BODE PLOTS. THE GM IS FOUND BY FINDING THE MAGNITUDE OF THE COMPOSITE MAGNITUDE WHERE THE COMPOSIT PHASE = -180 DEG. THE PM IS FOUND BY FINDING THE PHASE OF THE COMPOSITE PHASE WHERE THE COMPOSITE MAGNITUDE = 0dB AND ADDING +180 DEG AS SHOWN ON THE GRAPH AT RIGHT. PM = +180 in text GAIN MARGIN & PHASE MARGIN BODE PLOT EXAMPLE % KGH(s)=10/[s(s+1)(0.5s+1)] KGHnum=[10] KGHden=conv([1 1 0],[0.5 1]) % (s^2+s)*(0.5s+1) Disp(‘KGH = ‘) KGH=tf(KGHnum,KGHden) bode(KGH); grid KGH = 10 --------------------0.5 s^3 + 1.5 s^2 + s THE CLOSED-LOOP SYSTEM IS UNSTABLE GAIN & PHASE MARGINS ARE NEGATIVE (Note: Only one of them needs to be negative for the closed-loop system to be unstable.) CLOSED-LOOP POLES ARE: -3.8371 0.4186 + 2.2443i 0.4186 - 2.2443i Figure 10.36 Bode log-magnitude and phase diagrams for the system of Example 10.9 Bode phase plot for G(s) = 40/[(s +2) (s +4)(s +5)]: a. components; b. composite PM = 180 deg GM = 20 dB Figure 10.55 Effect of 1 sec delay 1. DELAY ONLY EFFECTS THE PHASE PLOT 2. A T SECOND DELAY IS REPRESENTED BY e-TS e-Ts s=jω =e -Tjω = 1∠ - Tω,θ 180 = -Tω deg Delay π -1s 1 GH(s)e-Ts = e , T=1 second delay s(s+1)(s+2) -Tjω -1jω 1 GH(jω)e = e jω(jω+1)(jω+2) GH(jω)e -Tjω =Mag(GH(jω)) with an Angle(GH(jω)e -Tjω )= [ Angle of GH(jω) deg ] - ω 180 π 180 θDelay = −ω π GH Phase without delay Composite Phase GH Phase + θDelay Figure 10.56 Step response forclosed-loop system with G(s) = 5/[s(s +1)(s + 10)]: a. with a 1 second delay; b. without delay Figure 10.39 Representative log-magnitude plot of Eq. (10.51) Given a closed - loop system : ω2 C(s) n ≈ G (s) = CL 2 R(s) s +2ζω +ω 2 n n Bandwidth is defined as the frequency at which the magnitude of a closed-loop system is - 3 dB. ω BW = ωn (1 - 2ζ 2 ) + 4ζ 4 - 4ζ 2 + 2 dM Peak M, M , when = 0 yields : p dω n 1 M = p 2ζ 1-ζ 2 ω =ω 1-2ζ 2 p n 20log G (jω) CL Figure 10.41 Normalized bandwidth vs. damping ratio for: a. settling time; b. peak time; c. rise time Closed-loop System is assumed to approximate a 2nd order system. Figure 10.48 Phase margin vs. damping ratio Closed-loop System is assumed to approximate a 2nd order system. Phase Margin of GH(s) PM = ΦM = tan 2 4 -2ζ + 1 + 4ζ -1 2ζ