Compensation for Rotor Position Estimation Error
advertisement

Compensation for Rotor Position Estimation
Error due to Cross-Coupling Magnetic
Saturation in Signal Injection Based Sensorless
Control of PM Brushless AC Motors
Z. Q. Zhu, Y. Li, D. Howe, and C. M. Bingham
Department of Electronic and Electrical Engineering, University of Sheffield, Mappin St., Sheffield SI 3 JD, UK
although the problem was not fully studied or solved. Recently,
it was established in [7] [8] that the error was caused by the
effect of cross-coupling magnetic saturation between the d- and
Abstract- This paper proposes a simple method for reducing
the rotor position estimation error caused by cross-coupling
magnetic saturation between the d- and q-axes when signal
injection based sensorless control is applied to a brushless AC
(BLAC) motor. The error in the estimated rotor position, which
results when conventional signal injection sensorless control is
employed, is analyzed. Based on an improved model of a BLAC
motor which accounts for the influence of dq-axis cross-coupling
on the high-frequency components of the incremental winding
inductances, as deduced by either finite element analysis or from
(i.e.,
Ldqh#O),
and was influenced by the machine
design, but, as yet, no measures, from the control aspect, have
been proposed to reduce the error. Nevertheless, it is well
known that a mutual inductance exists between the d- and qaxes of a BLAC motor (Ldqh) as a result of cross-coupling due to
magnetic saturation, as shown in [9], both experimentally and
by finite element analysis. However, for simplicity, the
.
measurements, an improved signal injection based sensorless
scheme is proposed. Its effectiveness is demonstrated by
nfluence of
.
. '
cross-coupling magnetic
.
.
saturaton1S
usually
neglected in sensorless rotor position control [1-6].
This paper improves the rotor position estimation accuracy in
a signal injection based sensorless control scheme by
accounting for the influence of cross-coupling due to magnetic
saturation. Section II presents an improved model of a BLAC
motor which accounts for the influence of the cross-coupling.
Section III analyzes the position estimation error which arises
when cross-coupling is neglected, and proposes a simple
method of reducing the error, based on either predicted or
measured
incremental
inductance
characteristics.
Measurements are presented in section IV which validate the
effectiveness of the proposed method.
measurements on a BLAC motor having an interior permanent
magnet rotor.
I. INTRODUCTION
It is necessary to acquire rotor position information for a
permanent magnet (PM) brushless AC (BLAC) motor in order
to control the 3-phase stator currents, and, hence, the torque.
Generally, either an encoder or a resolver is employed.
However, such discrete position sensors not only increase the
system complexity and cost, but may also compromise the
reliability. It is desirable, therefore, to estimate the rotor
position indirectly from the terminal voltages and currents.
Sensorless methods based on high frequency signal injection
exhibit excellent rotor position estimation performance at
standstill and low speeds, when back-EMF based sensorless
methods are problematic. The most common high frequency
signal injection method uses a sinusoidal carrier voltage signal.
It was originally developed for use with induction motors, but
was subsequently applied to PM BLAC motors with geometric
saliency [1-5]. The identification ofthe initial rotor position was
obtained in [4] [5] by comparing sine and cosine terms in the
2nd_order harmonic component in the d-axis current. In [6], it
was applied to a non-salient BLAC motor equipped with a
surface-mounted PM rotor, by utilizing the saliency effect
which was caused by magnetic saturation.
However, it was found experimentally in [2] that the error in
the estimated rotor position increases with the load current,
1 -4244-0743-5/07/$20.OO ©2007 IEEE
axes,
q-
I. ANALYSIS OF CROSS-COUPLINGEFFECT IN BRUSHLESS AC
MOTOR
For a 3-phase BLAC motor, the phase voltages, va, vb, and vc
are given by:
Fval
b
VC
_ic_
/bdt
ldt
(1)
where ia, ib, ic, I/a, VIb and qfc are the phase currents and
flux-linkages, respectively, and Rs is the stator winding phase
resistance. Since the 3-phase flux-linkages are functions of the
phase currents and the rotor position, 0Sr, (1l) can be expressed
as:
208
0ava
0aa
aa
dia V
ai| dt
Vb dib
a1a
13iadt
0
fLah
V/a dO,
=
[V a(ia+Ail,b, icAl) - VJa(ia, ib,h li, m)]/Ai
00a dt |Labh = IV a(ilaIb+A4iIc,).
mr) Va(lalb ,Ici,m)]/Ai
0b
aVb
+ ayl,b
aob dObI
Vb = Rsi5b + a_
dt
where Ai is an incremental current, and the influence of the
LVCJ j
I
permanent magnet flux, Dm, on the magnetic saturation is
C
dic
,C
C
a c dOc (2)
alaei
&3ib
&3i jdt
aoOc dt
considered in the finite element calculation of ql,.
aia O'b
oic
Since the incremental phase self- and mutual-inductances are
|-ial
-Es (Oa)
La7h Labh Lach ia
functions of the rotor position, 0r, the terms in the incremental
=Rs ib + Lbah Lbh Lbch P ib + CWr -Es (0,b)
inductance matrix are given by:
LI~~ I!Lcah
cbh
~~~~jJ)lP!bl
+
L-EjOj~~~~~~
Lcbh Lch
FLah =L)ah(or)
[Labh=La ab -;T
where Lah, Lbh, and Lch, and Labh, Lbch, Lcah, Lbah, Lchh, and Lach are
Lbh Lah (Or -227 / 3), Lbch =LCbh Labh (or -i) (8)
the phase incremental self-inductances and incremental
LLch =Lah (Or +2;T / 3) LLcah =Lach =Labh (Or+7iT/3)
mutual-inductances, respectively. Oa Ob, and Oc are the position
of the phase windings relative to the rotor, and defined as: Oa=6r,
The d- and q-axis incremental self- and mutual-inductances
Ob=Or-22t/3, and Oc=Or+2±lt3, and Es is the phase EMF. In a signal may be determined approximately from the phase inductances
injection based sensorless control scheme, only the high using (6). By way of example, typical finite element calculated
frequency terms in (2) are considered [6], i.e.:
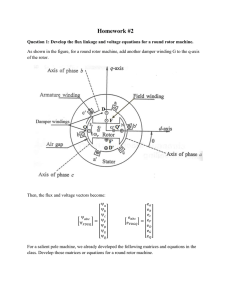
magnetic field distributions on both open-circuit and at rated
load for the machine under consideration are shown in Fig. 1,
~Vahl
rah 'abh ach 1 Flahl
and corresponding phase incremental self- and
(3) mutual-inductances, Lah and Labh, and d- and q-axis incremental
Vbh L=|'bah Lbh Lbch IP ibh|
Vch
Lcah Lcbh Lch Jch
self- and mutual-inductances, Ldh, Lqh, Ldqh, and Lqdh, are shown
in Figs. 2 and 3, respectively. The direct calculation of d- and
where Vah, Vbh, and Vch, and iah, ibh, and ich are the high frequency q-axis incremental self- and mutual- inductances will be
components of the phase voltages and currents, respectively, discussed later.
and p=d/dt. Equation (3) can be transformed into the dq-axis
reference frame as:
Fva 1
?ia
Fl 1
a
alb
a
0
I_C LLCah
LL?dh
LiC
ah
Lq
ach
abh
bah
Lda L cbh
L*iL|td
-LEs (O}C)
I
bch
ch ]C
hLl
asF
dh
h.
(4)
P'~qh~
Lqdh Lqh
where C is the 'Park' transformation matrix, and Ldh, Lqh, Ldqh
and Lqdh are the d- and q-axis incremental self- and mutualinductances, i.e.:
Fcosa0.-sinO 11
C
cos
Ob
-sin Ob 1
Lcos Oc -sinOc
L
~
L
dhdqh
1
~
~
Ldqh j
which-1
Lah and Labh
are
ahL abh
Lah
~~Lcah
can
griven
(5)
1ij
L
in
L h
ac
Lcb,h0~~~~~~~~0
Lch
whifle
flu-irv1nkages
be determined according to the
(7),
L6[=L P(Or 3)
L L(
dh
Lih
La and Lcah cbh
Ldh Ldqh *1
dt
thep
definitions
can
beP
R
a_
(a) Open circuit, id-OA, iq=OA
As Lah and Labh in Figs. 2(a) and 3(a) vary periodically with
the rotor position, 0r, they can be expressed approximately as a
Fourier series, i.e.:
60
E
o0
cs
50
-------------------------------------
30/\
20
-a
-J -k =i,2,3,
Io
a:
Ea) -10
o: -30
-30
I
50
,
40
120
18
0R60t12
180
240
300
240
300
Rotor position (elec. Deg.)
(a) Incremental phase self- and mutual-inductances
60
E
60
L-
20
- 1-0---a)
30
(a5kcos kOr+ b5ksin kOr)
{Labh(O:)= amo+
(ankcosk+bmksinbk,
(9
)
k1,2,3,
where a5o, amo, a5k, b,k, amk, and bmk are the amplitudes ofthe DC
terms and the kth-order terms ofthe Fourier series, respectively.
Since the amplitude of the high order harmonics in Lah and Labh
is relatively small, only terms up to k=8 are considered and
transformed from 3-phase to dq- values using (6) and (7). The
average values of Ldh, Lqh, Ldqh and Ldqh are calculated from:
360
36
L qh
cu
=a5+
E
Sah(Or)
30
sx5
[Ldh
=(a,0-a 0)+(a 12+a )
[-(LsOhmOd+
{ Lqh = (as0 -amo) (as2/2+am2i)
2
Ldqh
Lqdh
m2
(10)
(bs2/2+bm2)
L dqh
As well be evident from (9), the saliency which results in a
BLAC motor equipped with an interior magnet rotor, Ldh#cLqh, is
caused by 2nd order co-sine terms, a52, am2, in the Lah and Labh
0
60
120
180
240
300
360
waveforms, which are considered in [10]. The cross-coupling
Rotor position (elec. Deg.)
effect is caused by 2nd order sine terms, b52, bm2, in the Lah and
Labh waveforms, which are usually neglected [10]. In
(b) Incremental dq-axis inductances
Fig. 2. Incremental inductances on no-load, iOA,iq=OA.
subsequent equations, Lqdh is written as Ldqh. It can also be
shown that the 5th and 7th order terms in Lah and Labh, i.e., as5,
60
E 50
bs5, aL7m5, as7, bs7, am7, and bm7, cause the variation of Ldh, Lqh,
40and Ldqh with rotor position every 60 elec. deg.. Other order
w
40 -harmonics in Lah and Labh do not appear in Ldh, Lqh and Ldqh, as a
an 30 Jr
La
o 20
result of (6).
l0
Although the d- and q-axis incremental inductances can be
Labhdetermined by transforming the waveforms of the incremental
5FU
a) -10 t
phase self- and mutual-inductances, Lah, and Labh, into the
/
2
<
a)
dq-axis reference frame, this requires the flux-linkage, Vla, of
__
_
_
_
_
_
_
phase a to be calculated for various d- and q- axis currents and
rotor positions, which is time consuming. To reduce the finite
0
60
120
180
240
300
360
element calculation time, the incremental d- and q-axis
Rotor position (elec. Deg.)
inductances can be calculated directly from d- and q- axis
nmflux-linkages by applying appropriate d- and q-axis currents in
60
the finite element analysis, equation (l1). Results calculated
E 50
4
I Lqh
a)
40
directly in this way are shown in Fig. 4.
Ldh =[d(id+ Aid, i, qm
=l
au 30
iddiq, m)] | Aid
dh
=
-,
LqdLL,h
Aiq, (D )-Vfqd(Id,ITm]/q
(id,iq, D )]/Aiq
[yfq (id I'q' ++ITm)VJ
=[V~d('d
~~~~~~~~~~~~dqh
0
X
E -10
o -20
-30
-
bm5,
-
-1
-------------------------
-------------------
-_1
-_
E
-10
L
--
o
--
0
60
120
180
240
Rotor position (elec. Deg.)
-Ld-tJ-(id- + Ai+d,Aiqn iq, O(mm )- q (dniq,iq, Dn/tm)/ AidAiq
d41h
-di -4(
-Li
300
,
-M c (/
O),, )
various d- and q-axis currents, id and 'qn the d- and q-axis
incremental self- and mutual-inductances, Ldh, Lqh, Ldqh, vary
with the d- and q- axis currents because of saturation. For the
360
(b) Incremental dq-axis inductances
BLAC motor under consideration, Fig. 1, Ldh Lqh and ldqh are
Inrmetlinutncsonfl-q
Fig.3.
210
FVe 1
FLdh Ldqh- -1
FVdh1
Fl
T
I e =T(AO)
P
.e
=T(AO) L
(AO)
Z
dqh
qh
Vqh
j
-1qhj
LVqh
12
Lavg -Ldjcos(2AO+Om)
Ldjesin(2A0+Om (1Fi
25mH, 32mH and -7mH, respectively, when iL=OA and iq=4A.
Clearly, since the magnitude of Ldqh iS comparable with that of
Ldh and Lqh, its influence cannot be neglected in the high
frequency voltage equations.
L
60
£ 50
--
(usss 40
0
-a
-C
X
^
*
*
*
*
cos(AO) sin(AO)
j $ "== 8_ -_ T(AO)=
Id=1A -sin(AO) cos(AO)
i
30
@I d=OA
*
*
Lavg (Lqh+Ldh)/2, Ld =(Lqh-Ldh)2
hL2(
-4- Id=-IA
>~
-
+
+
E 2()
-i
Lno2
I d=-2A
-4
-3
1
-1
0
2
3
q -axis current (A)(a) d-axis incremental inductance, Ldh.
-2
(13)
i
Ldif
+
dif+Ldqh
4
q-aisc
=
)Vsig
avg-Ld
cos(2A0+Om)
Ldif sin(2AO+Om)
0
1iLh1
P
p
Ldif sin(2AO+Om)
Lavg+Ldif cos(2A0+Om) IqhL
The resulting d- and q-axis high frequency currents in the
E-US
a)~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~(4
Id=3A
c40
estimated reference frame are obtained by solving (14):
r 30 | _
_q |
20
3 l()
evSi
d=O~
IA )[Lag +Ld cos(2AO+O,m)]
sig2~ ~ ~IL2
+~~~~~~
--Id:-1A
| dh
1
___
-4
15
___
-,3
o
l'h
___
-2
___
-t
___
0
___
1
q--axis current (A)
___
2
___
3
4
E'
0
E
0t
------------4_
dif)
Ldj sin(2A0+Om,)
the estimated rotor position as a result ofthe incremental mutual
inductance, Ldqh, which exists between d- and q-axes. The error
-Id=2A
-~~~~~~~~~~~~~~~
L
signal injection based sensorless schemes [6], an error exists in
Id=3A
5
,avg
Thus, ifthe high frequency component in the q-axis current is
controlled to be zero, i.e. iqhe=O, as was in the conventional
isgivenby:
+Id=1A
()--------
o
-i
P('
L
(b) q-axis incremental inductance, Lqh.
10
I_,
-4a)
hd)
Since the high frequency sinusoidal voltage, vsig, is applied to
the estimated d-axis, i.e., Vdhe=Vsig, VqhOe=0 (12) becomes:
60
£
(
Om =arctan(Ldqh/Ldf),
Id0-3A
C:
0
Iqh j
where AO=Ore_Or is the error in the estimated rotor position, and
Id=3A
-_ Id=2A
I_,
Lavg+Ldif cos(2AO+Om)j
Ldif sin(2AO+Om)
~~~d-A2
-4Id30A
Id=-2A
I d=O
0
1
60-m
(
2Lh
(16)
Ldh -Lqh
2
-rca
|-
Idd=-3A 6T
Id= 3
0~~~~~~~~~~~~~~~
a)d -xlm
-1 mcrmeta
0
-4 -3 -2 ta
q-axis currentt (A)
a)
3
4 21
------
o
------
0
60
a)
o( 0 3 500
andq-axiscurrents.~
~ incremental
~ ~ ~~~~~~~~~~
C
inductance, Ldqh=Lqdh.
(c) dq-axis mutual
o a)
.p
4.
Variation
of
incremental
selfand
mutual-inductances
with
dFig.
dq-axis
-_F
and q-axis currents.
O01
0_
III. ANALYSIS OF ROTOR POSITIoN ERROR CAUSED BY
CROSS-COUPLING
transformed into the estimated rotor position, Ore, i.e.:
211
_
_
0
--------0
0element
ed=OA0
_+ d O
+I d=2A
_
60
45
.0
co
30
l
215
E
.o
a)
oo
0
sampling, the speed control loop, and the PWM are all set to
5kHz, and the injected signal is 35V, 330Hz. The actual rotor
position, 0r, is obtained from a 1024 pulse-per-revolution
encoder, which is used as a reference for the estimated rotor
position Ore. The rotor position error compensation factor, Kr,
was Kr=8.0 '/A, as obtained from the experimental results given
in Fig. 5(b).
i- Id 3A
-
-4---I-----I d= 2A
Id=
-
lA
Id=O A
0~~~~~~~~~~~~~~d1
lA
-Id
--d2
15
O
ow
-----
o ° 30
Id=3A
-
,Lv cl
45
1)
60
4
3
2
1
0
1
q-axis current (A)
2
3
4
(b) Directly measured error, Kr8.00/A.
P11)
--
Fig. 5. Comparison of predicted and measured rotor position estimation
for various d- and q-axis currents.
A1AC
id
error
to
I
Clearly, the error in the estimated rotor position will only be
when Ldqh=O. The stronger the cross-coupling between the
d- and q-axes, the larger will be the error in the estimated rotor
position. For the BLAC motor under consideration, the
variation of the predicted error with the d- and q-axis currents is
zero
AC
..sed
shown in Fig.5(a), the predictions being obtained by employing
iie element
lmn cluaediceena
Fg
theth
finite
calculated incremental inductances,
Fig. 4,,iin
(16).
The error in the estimated rotor position has also been
measured by driving the BLAC motor with the actual rotor
position obtained from a precision encoder, so that id=id, and
6. Signal injection sensorless control with compensation for rotor position
Fig.
error due to cross-coupling.
nucacs
Iqe=iq. The high frequency voltage
was
60
°6-
45
--
E)& 315
injected into the
estimated d-axis, and the estimated high frequency q-axis O 2
°a
current, iqhe, was forced to zero by adjusting the estimated rotor
The
measured
rotor
estimation
position, OrU.
directly
position
error is shown in Fig. 5(b), which compares well with the
o
predicted results shown in Fig. 5(a).
ry
IV. COMPENSATION OF ROTOR POSITION ERROR DUE TO
CROSS-COUPLING AND COMPARISON WITH CONVENTIONAL
METHOD
The error in the estimated rotor position can be compensated
for by either employing (16) or using the results shown in Fig. 5.
However, from both the predicted and measured results shown
in Fig. 5, it can be seen that the error in estimated rotor position
is approximately proportional to the q-axis current, i.e. AIO.Kriq.
Thus, the error can simply be compensated for according to the
q-axis current, i', by applying a compensation factor, Kr This
significantly simplifies the implementation of an error
compensation scheme.
The proposed sensorless control scheme is shown in Fig. 6,
and the parameters of the interior permanent magnet motor,
whose incremental inductance characteristics were shown in
Figs. 4 and 5, are given in Table I.
The control strategy is implemented on a TMS32OC3 1 DSP,
together with a PIC 1 8F443 1 MCU, which serves as the PWM
generator and the encoder interface. The frequencies of the AD
212
-
0
Id=3A
lA
--Id=O
-4Id=2A
' 15
-
30
1~~~~~~~~~--d=3A
*
-6-
-45
-
-60
-4
60
0
-1
1
2
3
4
q-axis current (A)
(a) Conventional method, RMS(Ore-Or)=21. 10
-3
-2
4
.
c
E& 30
ag
-
iId=-lA
15
o ° °Id=OA
15
o
-
Q-
1
-- Id=lA
-Id=2A
3
--Id=3A
0
t
Fig. 7.
-45
-60
Id=-2A
-
-4
-3
-2
-1
0
1
2
3
q-axis current (A)
(b) Proposed method, RMS(Ore~Or)=3.2°
Measured rotor position estimation error with
proposed signal injection based sensorless methods.
4
conventional and
the rotor speed command is changed from -1OHz to +1OHz, i.e.,
-200rpm to +200rpm. As will be seen in Fig. 8(a), when the
conventional signal injection based sensorless scheme is
employed, the estimated rotor position error increases
significantly with the load current, and is 250 when iq=4A. By
applying the proposed error correction method this reduces to 50,
TABLE I
SPECIFICATION OF BLAC MOTOR
Number of pole-pairs
3
Rated speed
Rated torque
Rated phase voltage (peak)
1000rpm
4.0Nm
158V
Rated phase current (peak)
4.0A
Phase resistance R,
6.0Q
Fig. 8(b).
V. CONCLUSIONS
Finite element analysis and measurements have shown that
the neglect of cross-coupling between the d- and q-axes of a
BLAC motor which results due to magnetic saturation, may
lead to significant errors in the rotor position estimation when
signal injection based sensorless control is employed. However,
by applying a simple error correction method, a significant
improvement in the accuracy of the rotor position estimation
can be achieved.
Fig. 7 compares the measured steady-state error in the
estimated rotor position for various d- and q-axis currents, ie
when the estimated rotor position is used for position
and
feedback. With conventional signal injection based sensorlessi
control, Fig. 7(a), the rotor position estimation error increases
with both the magnitude of iq and increasing positive values of
id, since the magnetic circuit then becomes more heavily
saturated and the influence of dq-axis cross-coupling becomes
more significant. For example, the error increases to 450 when
ird3A, iq=4A, while the root mean square (RMS) error in Fig.
7(a) is 21.1'. However, when the proposed error compensation
method is applied, the RMS rotor position estimation error is
reduced to only 3.20, Fig. 7(b).
jle,
REFERENCES
Ogasawara, and H. Akagi, "Implementation and position control
performance of a position-sensorless IPM motor drive system based on
magnetic saliency," IEEE Trans. Industry Applications, vol.34, no. 4, pp.
806-812, July-Aug. 1998.
M. J. Corley, and R. D. Lorenz, "Rotor position and velocity estimation
for
permanent
synchronous machine at standstill and
~~~~~~
~~~~~~~~~~~
LS~~~~
jII1dh~~~~~~~~~d
IEEE
Trans. magnet
~~higha salient-pole
speed,"
1998. Industry Applications, vol.34, no. 4, pp.
~~~~784-789,
July/August
[3 T. Aihara, A. Toba, T. Yanase, A. Mashimo, and K. Endo, "Sensorless
NO
torque control of salient-pole synchronous motor at zero-speed operation,"
.
g ^ .150
IEEE Trans. Power Electronics, vol. 14, no. 1, pp.202-208, Jan. 1999.
[4] J.I. Ha, K. Ide, T. Sawa, and S.K. Sul, "Sensorless rotor position
_[2]
A4-l l 01lilill 1ll 111 1 11 1
l > t II1! IIl
Es
[1] s.
il.-ited
a
curr-ent
0
3
(a) Conventional method
-Entlder
(e],ec, deg-,)
| ,.........................................................................................E
4o
i mw (S
estimation of an interior permanent-magnet motor from initial states",
IEEE Trans. Industry Applications, vol. 39, no. 3, pp.761-767, May-June
2003.
aa
1VF -[5]a H. Kim, K.K. Huh, and R.D. Lorenz, "A novel method for initial rotor
position estimation for IPM synchronous machine drives," IEEE Trans.
Industry Applications, vol. 40, no. 5, pp. 1369-1378, September/October
2004.
J.H.
Jang, S.K. Sul, J.I. Ha, K. Ide, and M. Sawamura, "Sensorless drive of
[6]
surface-mounted permanent-magnet motor by high-frequency signal
~~~~~~~~~~
~~~~~~~~~injection based on magnetic saliency," IEEE Trans. IndustryApplications,
vol. 39, no. 4, pp. 1031-1039, July-Aug. 2003.
P. Guglielmi, M. Pastorelli, A. Vagati, "Cross saturation effects in IPM
motors and related impact on zero-speed sensorless control," Conf Rec.
IEEE-IASAnnu. Mleeting, vol. 4, pp. 2546-2552, 2005.
[8] N. Bianchi, S. Bolognani, "Influence of rotor geometry of an interior PM
motor on sensorless control feasibility," Conf Rec. IEEE-IAS Annu.
Mleeting, vol. 4, pp. 2553-2560, 2005
[9] B. Stumberger, G. Stumberger, D. Dolinar, A. Hamler, M. Trlep,
-5
~~~~~~~~~~~~~[7]
permanent-magnet
synchronous
motor," IEEE
Trans.
Industry
Applications, vol. 39, no. 5, pp. 1264-1271, September/October 2003.
{A)
[10] A. E. Fitzgerald, Charles Kingsley, Jr., Stephen D. Umans, "Electric
Machinery, 5th Edition", McGraw-Hill Book, 1992.
1
4
(S)
(b) Proposed method
Fig. 8. Step speed response of signal injection based sensorless operation (speed
command: ±10 Hz, and ir~0).
0
Fig. 8 compares the estimated and actual rotor position when
the estimated rotor position is used for position feedback and
213