ARTICLE IN PRESS
Computers & Geosciences 35 (2009) 1933–1939
Contents lists available at ScienceDirect
Computers & Geosciences
journal homepage: www.elsevier.com/locate/cageo
Estimation of formation strength index of aquifer from neural networks
Bieng-Zih Hsieh, Chih-Wen Wang, Zsay-Shing Lin Department of Resources Engineering, National Cheng Kung University, No. 1, University Road, Tainan 701, Taiwan
a r t i c l e in fo
abstract
Article history:
Received 5 May 2008
Received in revised form
23 September 2008
Accepted 25 November 2008
The purpose of this study is to construct a model that predicts an aquifer’s formation strength index (the
ratio of shear modulus and bulk compressibility, G/Cb) from geophysical well logs by using a backpropagation neural network (BPNN). The BPNN model of an aquifer’s formation strength index is
developed using a set of well logging data. The model is a [4-5-1] three-layer BPNN with a four-neuron
input layer (depth, gamma-ray log data, formation density log data, and sonic log data, respectively), a
five-neuron hidden layer, and a one-neuron output layer (formation strength index).
The optimal learning rate and momentum constant used in the BPNN model are obtained from serial
combinative experiments. The inside test and outside test are implemented to check the performance of
network learning and the prediction ability of the network, respectively. The results of the inside test,
based on 84 training data sets from a total of 105 data sets, show that the network has been well-trained
because the mean square error between the network output value and the target value from the inside
test is very small (1.1 104). The results of the outside test, based on 21 testing data sets from 105 data
sets, show the excellent prediction ability of the BPNN model, because the network prediction values
closely track with the target values (the mean square error is 2.1 104).
& 2009 Elsevier Ltd. All rights reserved.
Keywords:
Back-propagation neural networks
Geophysical well logs
Groundwater
Soft computing
1. Introduction
The major parameters (or formation elastic constants) related
to formation strength are shear modulus, bulk compressibility,
Young’s modulus, and Poisson’s ratio. Some of these parameters
are related and dependent on the other parameters (Goodman,
1989). For example, shear modulus can be expressed in terms of
Young’s modulus and Poisson’s ratio. More specifically, the
formation strength is proportional to shear modulus and inversely
proportional to bulk compressibility. Thus, Tixier et al. (1975)
used the formation strength index (G/Cb), which is the ratio of
shear modulus (G) to bulk compressibility (Cb), to predict
formation sanding in an oil and gas reservoir. The formation
strength index (G/Cb) is not only a useful indicator of potential
formation sanding (Tixier et al., 1975), but can also be used as a
parameter to describe the strength of an aquifer (Hsieh et al.,
2007).
The formation strength index (G/Cb) can be calculated from
two elastic constants, such as shear modulus (G) and bulk
compressibility (Cb). Both elastic constants in turn can be
obtained from core measurement (Goodman, 1989) and/or
geophysical well-logging analysis (Tixier et al., 1975; Temples
Corresponding author. Tel.: +886 6 275 7575x62825; fax: +886 6 238 0421.
E-mail addresses: bzhsieh@mail.ncku.edu.tw (B.-Z. Hsieh),
wcw0328@ms56.hinet.net (C.-W. Wang), zsaylin@mail.ncku.edu.tw (Z.-S. Lin).
0098-3004/$ - see front matter & 2009 Elsevier Ltd. All rights reserved.
doi:10.1016/j.cageo.2008.11.010
and Waddell, 1996; Hsieh et al., 2007). The formation strength
index (G/Cb) used in this study is from geophysical well-logging
analysis (Tixier et al., 1975; Hsieh et al., 2007) in which the
formation density log (FDC) data, sonic log data, and natural
gamma-ray (GR) log data were used to calculate the elastic
constants and formation strength index. The formation density log
data and natural gamma-ray log data are used to calculate the
total porosity, effective porosity, and dispersed-shale index of the
formation (Hsieh et al., 2007). Poisson’s ratio is estimated from
the dispersed-shale index in the geophysical well logging analysis
(Tixier et al., 1975; Hsieh et al., 2007). The shear modulus (G) and
bulk compressibility (Cb), which are used to calculate the
formation strength index (G/Cb), are then calculated from the
formation density log data, sonic log data, and Poisson’s ratio
(Tixier et al., 1975; Hsieh et al., 2007).
Tixier et al. (1975) estimated the formation strength parameters (such as shear modulus, bulk compressibility, Poisson’s
ratio, etc.) and formation strength index (the ratio of shear
modulus (G) and bulk compressibility (Cb), G/Cb) of a hydrocarbon
formation from the formation density log and the sonic log. In this
study, a regional empirical equation was developed to estimate
Poisson’s ratio based upon the dispersed-shale index without
using the information of shear-wave transit time, which was
difficult to detect and always lacking. Hsieh et al. (2007) estimated an aquifer’s formation strength parameters including shear
modulus, bulk compressibility, Poisson’s ratio, Young’s modulus,
and formation strength index (G/Cb) by using geophysical well
ARTICLE IN PRESS
1934
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
logs, including the natural gamma-ray log, the compensated
formation density log, and the compensated borehole sonic log
(BHC).
In the process of estimating formation strength index by using
well logs, the empirical equation of Poisson’s ratio and the
dispersed-shale index must be used very carefully or be modified
when the research area is different. In a shallow aquifer formation,
the dispersed-shale index should be estimated from the formation
density log and gamma-ray log, because a suitable value for the
compaction factor (CP) required in the calculation of sonic
porosity (fSV) is usually unclear (Hsieh, 1997). Thus some
empirical equations are required. In this case, a neural network
can be used to reduce the problem of derived empirical equations
and unclear data.
In a neural network, the relationship between input data and
output data does not need to be known, because the neural
network will find the correlation during the training (or learning)
process from the known examples. In recent petroleum engineering research, the combination of the geophysical well logs and the
aid of back-propagation neural network (BPNN) have been studied
extensively. Rogers et al. (1992) constructed a three-layer backpropagation neural network to determine the formation lithology
from geophysical well logs. The input layer of the BPNN model
includes three neurons (parameters) representing gamma-ray,
neutron, and formation density log data; the hidden layer includes
four hidden neurons; and the output layer includes four
neurons representing limestone, dolomite, shale, and sandstone.
Mohaghegh et al. (1996) used a three-layer back-propagation
neural network to predict porosity, permeability and fluid
saturation from well log data (gamma-ray, formation density,
and deep induction resistivity log data) and geological information (grain-size distribution, bulk density variations, and depositional environments). Helle et al. (2001) constructed two
back-propagation neural networks to estimate porosity and
permeability from well logs. The well log data including
gamma-ray, resistivity, sonic, formation density, and neutron log
data were used as input parameters to predict the formation
porosity and permeability. Shokir (2004) used a back-propagation
neural network to determine the water saturation in a lowresistivity formation. The BPNN model had five input neurons
representing spontaneous potential, gamma-ray, deep resistivity,
formation density, and neutron log data in the input layer, and one
output neuron representing water saturation in the output layer.
Mohaghegh et al. (2004) constructed a three-layer back-propagation neural network to determine the in-situ stress of hydrocarbon reservoir from well logs. The input parameters include
well log data (spontaneous potential, gamma-ray, sonic, bulk
density, and resistivity log data), depth information, tectonic
stress parameters, and formation lithology. Shokir et al. (2006)
used a back-propagation neural network to predict reservoir
permeability from conventional well log data. The ANN technique
is demonstrated by applying it to one of the Saudi Arabia’s oil
fields. The field is the largest offshore oil field in the world and
was deposited in a fluvial dominated deltaic environment. The
ANN permeability prediction model was developed using some of
the core permeability and well log data from three early
development wells. The BPNN model had six input neurons
representing corrected log porosity, gamma-ray, deep resistivity,
formation density, neutron log, and sonic log data in the input
layer, one hidden layer with 19 neurons, and one output neuron
representing formation permeability. Rezaee et al. (2007) used a
back-propagation neural network to predict shear-wave velocity
from well log data for a sandstone reservoir of the Carnarvon
basin, Australia. The well log data including gamma-ray, induction
resistivity, formation density, sonic, and neutron log data were
used in the input layer for predicting shear-wave velocity.
Since there have been few studies focusing on the hydrogeology research to combine the geophysical well logs and the aid of
artificial neural networks, the purpose of this study is to construct
an aquifer formation strength index prediction model from
geophysical well logs by using a back-propagation neural network.
2. Back-propagation neural network
As the most popular model for engineering applications, the
back-propagation neural network is a multilayer perceptron
including the input layer, hidden layer, and output layer (Haykin,
2007). Each layer contains some nodes and the nodes between
layers are connected by weight. The nodes of the input layer (or
input nodes) are used to accept the input message and the nodes
of the output layer (or output nodes) are used to produce the
output value. The hidden layers, between the input layer and the
output layer, are used to apply the interactive operation of nodes.
When the connected weights between each layer are changed, the
output value will change accordingly because of the high network
connectivity.
The BPNN is a supervised learning model that trains the
connected weights by an error-correction learning rule (Haykin,
2007). The BPNN learning consists of two steps: a forward pass
and a backward pass. During the forward pass, an input vector is
introduced from the input layer and propagated through the
hidden layer to the output layer, producing the output value of
the network. In this pass, each input is weighted. The sum of the
weighted inputs and the bias is transferred by an activation
function (such as a sigmoid function) to generate the output.
During the backward pass, the connected weight is adjusted by an
error-correction learning rule. In this manner, the network will
make the output value close to the target value. The normalization
of inputs can be used to accelerate the learning process (Haykin,
2007). When the error signal, which is the difference between the
target value and network output value, is very small and satisfies
the convergence limit, the BPNN is considered trained and can
subsequently be used for prediction.
3. Development of BPNN model
To build the BPNN model of an aquifer formation strength
index (G/Cb), the following well logs are used: the natural gammaray, the compensated formation density (FDC), and the compensated borehole sonic logs (Fig. 1). A total of 105 data sets, collected
from the depth interval of 61–222 m, including six different
formations and two different lithologies, are used in this study.
The formation strength index (G/Cb) used in this study is from
geophysical well-logging analysis (Tixier et al., 1975; Hsieh et al.,
2007). The range of values of the formation strength index is
between 0.07 1012 and 0.32 1012 psi2.
In general, the scale factor for the log data (measured directly
by the logging device) or the log-derived data (calculated from the
log data) and core/plug measurements are close to unity if the
logging devices are calibrated, and the depth correction is made
(Adams, 2005). For example, the scale factor for the formation
density log data (bulk density records in the wellbore) and the
core measurements (bulk density measurements from laboratory)
are very close to unity. As a further example, the porosity of
formation, the mean difference between the log-derived porosity
(calculated from the formation density log, sonic log, or neutron
log) and the core-measured porosity, should be less than 0.6%
(Adams, 2005). The scale factor for the log-derived porosity and
core/plug measured porosity are close to unity.
ARTICLE IN PRESS
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
Input Layer
1935
Hidden Layer
Output Layer
Depth
FDC
G/Cb
BHC
GR
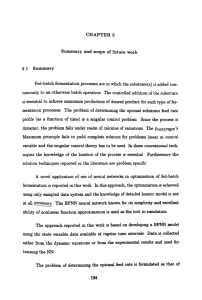
Fig. 2. The [4-5-1] three-layer BPNN model.
Fig. 1. Geophysical well logs used to develop BPNN model.
In this study, the log-derived formation strength index is used
by assuming the equation for the relationship between Poisson’s
ratio and the dispersed-shale index, taken from literature
(Anderson et al., 1973; Tixier et al., 1975; Hsieh et al., 2007), is
valid.
3.1. BPNN model structure
The BPNN model developed in this study includes an input
layer, a hidden layer, and an output layer. The selection of input
layer parameters (or well log data) is according to the relationship
with the output parameter (formation strength index). Not all
geological characteristics are applicable as input parameters and
such inapplicable input parameters will result in incorrect
estimation. The well-logging information of FDC and BHC are
the most important input parameters in the BPNN model because
there is a high correlation between formation strength index and
formation density (from FDC) and compression-wave transit time
(from BHC) (Tixier et al., 1975; Hsieh et al., 2007). Further, the
well-logging information of GR is a necessary input parameter,
because the formation strength will be influenced by existing clay
and silt (Dewan, 1983; Crain, 1986). There is also a tendency for
formation strength to increase as the depth increases and,
therefore, depth should be selected to be an input parameter
(Mohaghegh et al., 1996). Thus, the input layer neurons (parameters) include Depth, GR, FDC, and BHC (Fig. 2). The output layer
neuron is the formation strength index (G/Cb), which is the
parameter that the BPNN will predict.
The nonlinear relationship between input and output parameters cannot be determined without a hidden layer, but the
networks will be too complex with excessive hidden layers. In
practice, the problem of function mapping can be solved using one
hidden layer with sufficient hidden layer neurons and an adequate
number of weights (Goda et al., 2007). In this study, one hidden
layer is adopted to build the BPNN prediction model.
The optimal number of hidden layer neurons is found by a
cross validation method (Haykin, 2007), in which the number of
hidden layer neurons, the learning rate (Z), and the momentum
constant (a) are adjusted to find the optimal number of hidden
layer neurons. The optimal number of hidden layer neurons is
chosen based on the smallest mean square error (MSE) among the
results from different number of hidden layer neurons.
Three experiment runs with a momentum constant of 0.5 were
conducted using different learning rates (0.1, 0.5, or 0.9). In each
run, the mean square errors of target and output values were
obtained from different numbers of hidden layer neurons (from 2
to 10 neurons). The results of all three experiments with learning
rates of 0.1, 0.5, or 0.9 (Tables 1–3) show that the optimal number
of hidden layer neurons, based on the minimum of MSE, is five.
Thus, the best BPNN structure is a three-layer perception which
includes four input layer neurons, five hidden layer neurons, and
one output layer neuron; this is a [4-5-1] BPNN model (Fig. 2).
3.2. Learning rate and momentum constant
The efficiency of the network can be improved with an optimal
learning rate and optimal momentum constant setting. In general,
the learning rate of 0.5 is adopted in the range of 0.1–1.0 (Haykin,
2007), because a network with a small learning rate will converge
very slowly and network with a high learning rate may result in
ARTICLE IN PRESS
1936
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
Table 1
First experiment of hidden layer neurons (nHid) with [Z ¼ 0.1, a ¼ 0.5].
nHid
Mean square error (MSE)
Iterations
2
3
4
5
6
7
8
9
10
2000
5000
8000
10000
12000
15000
18000
20000
0.000510
0.000581
0.000545
0.000523
0.000632
0.000550
0.000622
0.000621
0.000627
0.000331
0.000334
0.000329
0.000321
0.000361
0.000337
0.000356
0.000342
0.000349
0.000299
0.000292
0.000284
0.000278
0.000306
0.000294
0.000301
0.000299
0.000302
0.000289
0.000277
0.000268
0.000263
0.000291
0.000279
0.000286
0.000283
0.000285
0.000282
0.000266
0.000258
0.000252
0.000279
0.000269
0.000276
0.000273
0.000274
0.000274
0.000256
0.000246
0.000241
0.000267
0.000258
0.000265
0.000261
0.000262
0.000267
0.000248
0.000238
0.000232
0.000258
0.000250
0.000257
0.000252
0.000252
0.000263
0.000244
0.000233
0.000227
0.000253
0.000246
0.000253
0.000248
0.000247
Table 2
Second experiment of hidden layer neurons (nHid) with [Z ¼ 0.5, a ¼ 0.5].
nHid
Mean square error (MSE)
iterations
2
3
4
5
6
7
8
9
10
2000
5000
8000
10000
12000
15000
18000
20000
0.000307
0.000273
0.000265
0.000268
0.000279
0.000269
0.000279
0.000269
0.000274
0.000255
0.000233
0.000224
0.000215
0.000239
0.000235
0.000242
0.000230
0.000236
0.000214
0.000210
0.000205
0.000193
0.000227
0.000219
0.000229
0.000211
0.000219
0.000195
0.000196
0.000190
0.000180
0.000221
0.000209
0.000222
0.000198
0.000210
0.000179
0.000181
0.000171
0.000163
0.000216
0.000198
0.000215
0.000178
0.000200
0.000161
0.000158
0.000149
0.000138
0.000209
0.000177
0.000203
0.000148
0.000179
0.000146
0.000142
0.000140
0.000132
0.000199
0.000155
0.000187
0.000139
0.000155
0.000138
0.000135
0.000135
0.000128
0.000183
0.000145
0.000168
0.000134
0.000147
Table 3
Third experiment of hidden layer neurons (nHid) with [Z ¼ 0.9, a ¼ 0.5].
nHid
Mean square error (MSE)
iterations
2
3
4
5
6
7
8
9
10
2000
5000
8000
10000
12000
15000
18000
20000
0.000296
0.000258
0.000245
0.000246
0.000257
0.000246
0.000259
0.000243
0.000253
0.000214
0.000203
0.000205
0.000192
0.000225
0.000212
0.000228
0.000195
0.000219
0.000167
0.000161
0.000173
0.000156
0.000202
0.000187
0.000203
0.000149
0.000190
0.000148
0.000145
0.000150
0.000139
0.000178
0.000164
0.000180
0.000135
0.000165
0.000136
0.000135
0.000136
0.000128
0.000151
0.000146
0.000157
0.000130
0.000143
0.000123
0.000125
0.000124
0.000120
0.000134
0.000133
0.000137
0.000121
0.000127
0.000116
0.000118
0.000116
0.000114
0.000125
0.000125
0.000128
0.000115
0.000120
0.000112
0.000114
0.000111
0.000110
0.000122
0.000121
0.000124
0.000111
0.000116
unstable convergence during the training process. With an
appropriate momentum constant, the network may have a faster
convergence rate and better stability. The interval of the
momentum constant is between 0.0 and 1.0, and usually the
value is not greater than 0.9 (Haykin, 2007).
In this study, the optimal value of the learning rate (Z) and the
momentum constant (a) are determined based on the MSE from
several combinative experiments. The learning rates (Z) used in
the experiments range from 0.01 to 0.9, and the momentum
constants (a) vary from 0.0 to 0.9. The MSE for each combinative
experiment is then calculated (Figs. 3–6). The results show that
the convergence speed increases as the momentum constant
increases for learning rates (Z) of 0.01 or 0.1 (Figs. 3 and 4). From
these two experiments, with learning rates (Z) of 0.01 or 0.1, the
best momentum constant of (a) 0.9 is obtained. However, a
stability problem occurred in the experiment with a momentum
constant (a) of 0.9 and learning rate (Z) of 0.5, because of the
oscillation of the MSE between iterations 500 and 900 (Fig. 5). For
the experiments with a learning rate (Z) of 0.5 or 0.9, the results
show that the best momentum constant (a) is 0.5 (Figs. 5 and 6).
The comparison results (Fig. 7), based on all the above
experiments (Figs. 3–6), show that the convergence speed of the
ARTICLE IN PRESS
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
0.016
0.015
Mean square error (MSE)
0.02
Mean square error (MSE)
1937
=0.0
=0.1
0.01
=0.5
=0.9
0.005
0.012
= 0.01, = 0.9
= 0.1, = 0.9
0.008
= 0.5, = 0.5
= 0.9, = 0.5
0.004
0
0
5000
0
5000
10000
15000
Training iterations
20000
Fig. 3. Mean square error of target and output values versus training iterations for
various momentum constant (a) for case of learning rate (Z) of 0.01.
Mean square error (MSE)
0.01
0.008
= 0.0
0.006
= 0.1
0.004
0.001
0
5000
= 0.9
10000
15000
Training iterations
20000
Fig. 8. Mean square error of target and output values versus iterations of BPNN
model training, using optimal learning rate and momentum constant.
0
5000
10000
15000
Training iterations
20000
Fig. 4. Mean square error of target and output values versus training iterations for
various momentum constant (a) for case of learning rate (Z) of 0.1.
Mean square error (MSE)
0.002
0
0
network with the combinative case of (Z ¼ 0.9, a ¼ 0.5) is the
fastest and the MSE value is the smallest. Therefore, in the BPNN
model the optimal value of the momentum constant (a) adopted
is 0.5, and the optimal value of the learning rate (Z) is 0.9.
3.3. BPNN model training
0.005
0.004
= 0.0
0.003
= 0.1
0.002
= 0.5
0.001
= 0.9
0
0
5000
10000
15000
Training iterations
20000
Fig. 5. Mean square error of target and output values versus training iterations for
various momentum constant (a) for case of learning rate (Z) of 0.5.
Mean square error (MSE)
0.003
= 0.5
0.002
20000
Fig. 7. Comparison of mean square error of target and output values for four
combinative settings.
Mean square error (MSE)
0
10000
15000
Training iterations
0.004
0.003
= 0.0
= 0.1
0.002
= 0.5
0.001
The 105 total collected well log data sets are randomly divided
into 84 training data sets and 21 testing data sets, based on an
80–20% proportion (Aminian and Ameri, 2005; Haykin, 2007). The
training data sets are used in BPNN training and the testing data
sets are used to estimate the prediction ability of the model. All
input parameters are normalized in the range of 0–1 to accelerate
network learning.
In training the BPNN model, the stopping criteria of network
training is set at either (1) a tolerable MSE error value of
1.0 104; or (2) 20,000 training iterations. Once the stopping
criteria is satisfied, the BPNN training is complete.
The result of network training (Fig. 8) shows that the mean
square errors drops dramatically in less than 1000 iterations, and
approaches 1.1 104 after 20,000 training iterations. The
convergence speed of the network is fast and the network is
stable when the optimal learning rate of 0.9 and momentum
constant of 0.5 are both used.
4. Results
= 0.9
0
0
5000
10000
15000
Training iterations
20000
Fig. 6. Mean square error of target and output values versus training iterations for
various momentum constant (a) for case of learning rate (Z) of 0.9.
After the training work of the BPNN model is completed, the
performance validation and the model verification are conducted
by an inside test and an outside test. The inside test is used to
check the performance of network learning by using all of the
training data set (Haykin, 2007). The outside test, using the
testing data set, is conducted to both check the prediction ability
ARTICLE IN PRESS
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
4.1. Inside test
The inside test of this study uses all 84 training data sets to
check the learning performance of the [4-5-1] BPNN model. The
comparison plot between the target value and network output
value (Fig. 9) shows that the network output value is very close to
the target value. The mean square error between the network
output values and the target values is 1.1 104. Therefore, the
network learning performance is very good.
The result of inside test (Fig. 10) further confirms the quality of
the network learning performance, because the cross plot of the
target value and the network output value are almost on the 451
line in the scatter diagram (Fig. 10). The calculated coefficient of
determination (R2) (Draper and Smith, 1998) from the 451 line
(Fig. 10) is 0.987.
4.2. Outside test
In the outside test, the 21 testing (non-trained) data sets are
used in the [4-5-1] BPNN model to check the model’s prediction
ability and to verify that there is no network over-fitting. The
comparison plot between the target value and the network output
value (Fig. 11) demonstrates the excellent prediction ability of the
[4-5-1] BPNN model, because the network prediction values
closely track with the target value. The mean square error
0.25
Formation strength index, 1012 psi2
of the network and to verify that there is no network over-fitting.
In other words, the testing data sets are also the verification
samples used to overcome the problem of network over-fitting.
Target value
0.20
0.15
0.10
Network output value
0.05
0.00
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
Testing data set
Fig. 11. Comparison between network output value and target value from outside
test.
0.25
Cross plot
A=T
Output value (A), 1012 psi2
1938
0.20
0.15
R2=0.977
0.10
0.05
0.00
Formation strength index, 1012 psi2
0.00
0.35
0.05
0.10
0.15
0.20
0.25
Target value (T), 1012 psi2
0.30
Fig. 12. Scatter diagram of outside test.
0.25
Target value
0.20
0.15
0.10
0.05
Network output value
0.00
1
9
17
25
33
49
41
57
65
73
81
between the network output values (prediction values) and the
target values is 2.1 104.
The cross plot of the outside test is very close to the 451 line in
the scatter diagram (Fig. 12) and the calculated coefficient of
determination (R2) is 0.977, which further shows the model’s very
good predictive ability.
Training data set
Fig. 9. Comparison between network output value and target value from inside
test.
The BPNN model of the aquifer’s formation strength index (G/
Cb) has been successfully completed and the prediction ability has
been proven by excellent performance during inside test and
outside test validation. The conclusions of this study are as
follows:
0.40
Output value (A), 1012 psi2
5. Conclusions
Cross plot
A=T
0.30
0.20
R2=0.987
0.10
0.00
0.00
0.10
0.20
0.30
12
Target value (T), 10 psi
2
Fig. 10. Scatter diagram of inside test.
0.40
1. A BPNN model of an aquifer’s formation strength index has
been developed. The BPNN model is a [4-5-1] three-layer backpropagation neural network. The input layer includes four
input neurons representing depth, GR, FDC, and BHC; the
optimal hidden layer includes five hidden neurons; and the
output layer includes one output neuron representing the
formation strength index (G/Cb).
2. The inside test shows that the network learning performance is
very good, because the network output values from the 84
training data sets are very close to the target values with a
mean square error of 1.1 104. The cross plot of output and
target values in the inside test are very close to the 451 line
with a calculated coefficient of determination of 0.987.
ARTICLE IN PRESS
B.-Z. Hsieh et al. / Computers & Geosciences 35 (2009) 1933–1939
3. The outside test shows that the output values of 21 testing data
sets are close to the target values with a mean square error of
2.1 104. The cross plot of output and target values in the
outside test are very close to the 451 line with a calculated
coefficient of determination of 0.977. The predictive ability of
the BPNN model for the aquifer’s formation strength index is
extremely good.
References
Adams, S.J., 2005. Core-to-log comparison—what’s a good match. In: Proceedings
2005 Society of Petroleum Engineers Annual Technical Conference and
Exhibition, Dallas, Texas, USA, pp. 3943–3949.
Aminian, K., Ameri, S., 2005. Application of artificial neural networks for reservoir
characterization with limited data. Journal of Petroleum Science and
Engineering 49, 212–222.
Anderson, R.A., Ingram, D.S., Zanier, A.M., 1973. Determining fracture gradients
from well logs. Journal of Petroleum Technology 25, 1259–1268.
Crain, E.R., 1986. The Log Analysis Handbook Volume 1—Quantitative Log Analysis
Methods. PennWell Publishing Company, Tulsa, Oklahoma, p. 648.
Dewan, J.T., 1983. Essentials of Modern Open-Hole Log Interpretation. PennWell
Publishing Company, Tulsa, Oklahoma, p. 361.
Draper, N.R., Smith, H., 1998. Applied Regression Analysis. Wiley-Interscience
Publication, New York, NY, p. 706.
Goda, H.M., Maier, H.R., Behrenbruch, P., 2007. Use of artificial intelligence
techniques for predicting irreducible water saturation—Australian hydrocarbon basins. In: Proceedings 2007 Society of Petroleum Engineers Asia Pacific
Oil & Gas Conference and Exhibition, Jakarta, Indonesia, pp. 787–796.
Goodman, R.E., 1989. Introduction to Rock Mechanics, second ed. John Wiley &
Sons, New York, NY, p. 562.
1939
Haykin, S., 2007. Neural Networks: A Comprehensive Foundation, third ed. Prentice
Hall, Inc., Upper Saddle River, New Jersey, p. 842.
Helle, H.B., Bhatt, A., Ursin, B., 2001. Porosity and permeability prediction from
wireline logs using artificial neural networks: a north sea case study.
Geophysical Prospecting 49, 431–444.
Hsieh, B.Z., 1997. Estimation of aquifer’s formation strength from well-logging data.
Unpublished M.Sc. Thesis, National Chang Kung University, Tainan, Taiwan,
p. 134.
Hsieh, B.Z., Chilingar, G.V., Lin, Z.S., 2007. Estimation of groundwater aquifer
formation-strength parameters from geophysical well log: the southwestern
coastal area of Yun-Lin, Taiwan. Energy Sources, Part A 29, 97–115.
Mohaghegh, S., Arefi, R., Ameri, S., Aminiand, K., Nutter, R., 1996. Petroleum
reservoir characterization with the aid of artificial neural networks. Journal of
Petroleum Science and Engineering 16, 263–274.
Mohaghegh, S.D., Popa, A., Gaskari, R., Wolhart, S., Siegfreid, R., Ameri, S., 2004.
Determining in-situ stress profiles from logs. In: Proceedings of the 2004
Society of Petroleum Engineers Annual Technical Conference and Exhibition,
Houston, Texas, USA, pp. 1251–1256.
Rezaee, M.R., Kadkhodaie Ilkhcji, A., Barabadi, A., 2007. Prediction of shear-wave
velocity from petrophysical data utilizing intelligent systems: an example from
a sandstone reservoir of Carnarvon basin, Australia. Journal of Petroleum
Science and Engineering 55, 201–212.
Rogers, S.J., Fang, J.H., Karr, C.L., Stanley, D.A., 1992. Determination of lithology from
well logs using a neural network. The American Association of Petroleum
Geologists 76, 731–739.
Shokir, E.M.EI-M., 2004. Prediction of the hydrocarbon saturation in low resistivity
formation via artificial neural network. In: Proceedings of the 2004 Society of
Petroleum Engineers Asia Pacific Conference on Integrated Modelling for Asset
Management, Kuala Lumpar, Malaysia, pp. 35–40.
Shokir, E.M.El-M., Alsughayer, A.A., Al-Ateeq, A., 2006. Permeability estimation
from well log responses. Journal of Canadian Petroleum Technology 45, 41–46.
Temples, T.J., Waddell, M.G., 1996. Application of petroleum geophysical well
logging and sampling techniques for evaluating aquifer characteristics. Ground
Water 34, 523–531.
Tixier, M.P., Loveless, G.W., Anderson, R.A., 1975. Estimation of formation strength
from mechanical-properties log. Journal of Petroleum Technology 27, 283–293.