Describing functions of power electronics circuits using progressive
advertisement

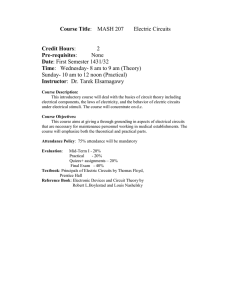
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 1026 Describing Functions of Power Electronics Circuits Using Progressive Analysis of Circuit Waveforms Henry S.-H. Chung, Member, IEEE, Adrian Ioinovici, Senior Member, IEEE, and J. Zhang Abstract—This paper presents a technique for calculating the ac line-to-output and control-to-output transfer characteristics of dc/dc converters, in which the time instants switching from one topology to the next one are a priori unknown and are determined by threshold conditions (i.e., by the time evolution of the converter waveforms). Describing functions are defined for small perturbations in either the input voltage or the control signal. After injecting a sinusoidal perturbation at the frequency of interest into the converter, the fundamental component of the output spectrum is determined. The describing functions are thus evaluated and provide the required ac transfer characteristics. The proposed method is integrated with a previously developed time-domain simulation algorithm, which is based on monitoring the switches positions, allowing the simulator to find automatically the switching instants and topological sequence of operation. Different examples are illustrated, including a classical pulse-width-modulated (PWM) converter, a current-programmed PWM regulator, and a switchedcapacitor converter. The simulated results are compared with the experimental measurements and the results in the available literature. Index Terms—Circuit simulation, power electronics, switching circuits. I. INTRODUCTION A. Previous Work A LARGE body of literature devoted to the frequency domain analysis of periodically switching circuits is available. However, they cannot be directly applied to power electronics circuits, since the switch’s operation is generally dictated by threshold conditions. Turning a switch on or off is dependent on the converter waveforms. In addition the topology sequence is unknown a priori, because it depends on the behavior of the switches that are controlled by the feedback circuit, as well as on the behavior of the internally controlled switches. For the same converter, different dynamic behaviors can be exhibited for different input voltage or output load. For example, depending on the load and switching frequency, a classical pulse-width-modulated (PWM) dc/dc converter can operate in two or three topologies in one switching cycle. Recently many analysis techniques have been developed for studying the dynamic behaviors of power electronics circuits. The methodologies can be classified into two main Manuscript received November 2, 1998; revised June 18, 1999 and November 16, 1999. This paper was recommended by Associate Editor M. K. Kazimierczkuk. H. S.-H. Chung and J. Zhang are with the Department of Electronic Engineering, City University of Hong Kong, Kowloon, Hong Kong. A. Ioinovici is with the Department of Electrical and Electronic Engineering, Institute for Technological Education, Holon 58102, Israel. Publisher Item Identifier S 1057-7122(00)05511-2. categories, including the averaging technique and the discrete or sampled-data modeling technique. For the averaging technique, starting from the state-space description of each converter topology and applying small-ripple approximation, an averaged time-invariant model is derived to represent the time-varying circuit [1]–[4]. Then, the averaged signals are perturbed and the equations obtained are linearized by neglecting second- or higher order terms, such as the products of the time-dependent quantities. After separating the ac and dc parts, various s-domain transfer functions are formulated. Although this approach is elegant and it is possible to derive a closed-form solution of the transfer functions, its accuracy is limited to a predetermined operating sequence and low-frequency response [5]. Variants of the averaging technique have also been developed. In [6] and [7], a subcircuit formed by the switches and a minimum number of other components is separated and replaced by an averaged model. A topology-independent approach is developed in [8], in which a switched inductor formed by an inductor and a switch is replaced by an averaged model. An averaged model that replaces the PWM switch is another idea used in [9]. The discrete or sampled-data modeling technique [10]–[13] also starts from the state-space equation sets for describing each converter topology and transforms them into difference equations. Some of these models go so far as to include the threshold conditions in a constrained equation, which is an integral part of the system equations that characterize the circuit dynamics [13]. However, all discrete models introduce inaccuracy either by carrying out multivariable Taylor series expansions around the nominal operating point and retaining the linear terms, or by approximating the transition matrix by the first two linear terms in the switching period of the exponential series. Another discrete-time technique is given in [14], in which numerous timedomain transient analyses of the circuit are performed. Each analysis is started with a different initial condition, in order to find the state-space matrices. Therefore, both averaged and discrete or sampled-data methods introduce two fundamental inaccuracies, including the small-ripple approximation and the small-signal linearization. The first one is due to the neglect of the terms containing second- or higher order of the switching period. The second one is introduced when the nonlinear terms in the perturbed equations are neglected. A detailed comparison of different approaches for small-signal analysis of switching power converters can be found in [15]. An important contribution to the frequency-domain simulation of power electronics circuits is given by applying the concept of the describing function [16]–[17]. The control-to-output 1057–7122/00$10.00 © 2000 IEEE 1027 Fig. 1. IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 Minimal period for integrating H for the case T =2 T = 7T . describing function is defined under the condition of constant line voltage and the line-to-output describing function is defined under the condition of constant control signal. The voltage at the output of the modulator is expressed as a Fourier series expansion. The resulting output voltage component at the same frequency as that of the perturbation signal is found by calculating the amplitude and phase of the fundamental term in the Fourier series. These values are used to determine the transfer functions at the frequency of interest. Extending the describing function concept for resonant converters has also been proposed in [18]–[19], in which an accurate analytical model for small-signal analysis of resonant converters is derived. Despite the fact that the methods were developed specifically for particular converters, they present good possibilities for generalization. By applying Zadeh’s bifrequency transfer function and the control-to-output describing function, a method for analyzing power electronics circuits is developed in [20] and [21]. The approach permits accurate prediction of the magnitude and phase of the component in the output spectrum that has the same frequency as that of the injected sinusoidal perturbation in the control signal. A general expression for the magnitude and phase of the fundamental Fourier component in the output spectrum is determined in terms of the system time-varying transfer function. This method requires the formulation of the state-space equation sets for each topology and exact analytical solutions of each set of equations, including an exact calculation of an exponential matrix. The closed-form solution of the control-tooutput describing function is analytically determined. However, the advantage is offset by the explicitly defined switching instants in the final formulas. This factor makes this approach difficult for analyzing converters that have a priori unknown switching instants and sequence of operation and calculating the line-to-output transfer function of closed-loop regulators with multifeedback loops, in which the switching times are affected by the minor internal feedback loop. B. Statement of the Goals Determination of frequency-domain models of power electronics circuits is essential for a correct design of their feedback control. The stability can be assured only by knowing accurately the transfer functions of the switching-mode converter. The accuracy requirements make the averaged models, the discrete models, or other methods that only keep the first two terms in the expression of exponential series inadequate for the above purpose. Though accuracy is the first concern, as in any computer-aided-design tool, the algorithm speed is also of interest. Many methods make use of state-space equation sets for each topology. However, a modern converter might contain several inductors and capacitors and possibly go through five, six, or even more topologies in one switching cycle, such as quasiresonant converters with extended period operating at constant switching frequency [22]. Hence, formulation of such a large number of system equations is time consuming and requires considerable computer memory. Moreover, the simulator has to be general, i.e., applicable to any power electronics circuit and independent of any a prior knowledge of the switches’ operation. This paper presents a technique that meets the above requirements. It starts from the use of describing functions, in which the fundamental component in the complex Fourier series of the output voltage is calculated at the frequency of injected sinusoidal perturbations in either the control or line voltage. Unlike [20] and [21], the proposed method is general and independent of a specific circuit. No state-space equations are required. The switching instants do not appear explicitly in the final formulas, which open a way for applying it to complex regulators that have many topologies in one switching cycle. The steady-state output waveform at any time instant is obtained by a previously developed stepwise time-domain simulation algorithm [23] which automatically determines the switching times and topological sequence of operation. CHUNG et al.: FUNCTIONS OF POWER ELECTRONICS CIRCUITS USING ANALYSIS OF CIRCUIT WAVEFORMS 1028 Fig. 2. Explanation of (14) for a generic cycle k . Basic definitions and formulas are reviewed in Section I-C. The methodology is presented in Section II. It can be applied to any dc/dc converter, regardless of the type of control such as duty-cycle control or frequency-control, single-loop or multiloop feedback, and the number of topologies in one switching cycle. Illustrative examples are given in Section III. The simulated results are compared with the experimental measurements and the results in the available literature. Similarly, by injecting a sinusoidal perturbation The sinusoidal component at frequency can be denoted as in (4) in the output voltage (5) The following control-to-output describing function is defined under constant line voltage: C. Basic Definitions and Formulas having a steady-state Let us denote the input voltage by and the control signal by having a dc value of value of . For example, in PWM regulators is one of the inputs of the modulator. It is obtained by amplifying the difference between the reference voltage and the actual output voltage. The other input is the clock ramp waveform. The intersection of these two inputs dictates the driving signal for the power stage. In order to calculate the line-to-output transfer function, . a small-signal sinusoidal perturbation is introduced in That is (6) The describing functions depend on the amplitude of perturbaor ). The limits of (3) and (6) are found for tion (i.e., or [16]. A general form infinitely small amplitude in of the component in the output spectrum of (2) and (5) is expressed as follows: (7) The sinusoidal component at frequency is denoted by (1) in the output voltage where either is either or or , with and is either or calculated as , and is (2) is defined as The line-to-output describing function the relation between the sinusoidal perturbation in the input voltage and the sinusoidal component in the output voltage at the same frequency under the condition of constant control signal [16] (3) (8) It is found that (9) In (8), it is assumed that the period . is a multiple of 1029 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 II. ALGORITHM DESCRIPTION A. Calculation of the AC Small-Signal Transfer Functions of Converters Based on the definitions in Section I-C, the major steps for frequency-domain analysis of power electronics circuits are as follows. a) A small-signal sinusoidal perturbation with frequency is injected in either the line voltage or control voltage, under the condition of either constant control voltage or constant line voltage, respectively. b) In each of the above cases, the expression of (10) is equivalent to the is calculated. It can be noted that zeroth term of the time-varying transfer function as defined in [20] and [21]. , or are c) According to (9), the quantities calculated as Arg time will be short for determining high-frequency responses because the value of becomes smaller. According to (10), is calculated as (13) A power electronic circuit goes through a number of configurations in each cycle. As the switching instants and even the number of cyclical configurations are not a priori known, it is preferable that they do not appear explicitly in the formula used for the calculation of . A stepwise time-domain simulation algorithm for power electronic converters is presented in the following section. It allows the simulator itself to determine a correct topology at each integration step. According to this method, the switching interval is divided into subintervals of different duration. The duration of each subinterval and consequently the are determined by the number of subintervals in each cycle simulator. Let us denote the duration of a subinterval in cycle by . The output voltage has the value within this switching subinterval. The integration in (13) is taken over cycles and can be solved numerically by (11) d) For the frequency , the describing functions in (3) and (6) are calculated. e) The process is repeated for different values of for finding the amplitude and phase characteristics of the small signal line-to-output and control-to-output transfer functions. The crucial step in the above algorithm is in Step b) and it is here where the basic differences between our approach and those available in literature reside. In order to include the complete operation of the circuit in a steady-state cycle, the integra. tion in Step b) has to cover at least one cycle of duration and in (8), the integration has to cover For calculating at least one cycle of variation of the sinusoidal perturbation of are independent quantities, one can duration . As and generally assume no relationship between these two numbers. Therefore, , the minimum period over which the integration must take place, has to be the least common multiple of and (12) and . The least Fig. 1 illustrates an example of common multiple interval of periodicity for the switching fre. quency and the perturbation frequency is is the time interval that the perturbation signal has to Thus, cover two complete cycles and the switching signal has to cover seven complete cycles. In the actual computation, is chosen at such values as to minimize the integration time by minimizing the value of . kHz, it is better to avoid choosing For example, if kHz. If the frequency response at this value is of inkHz is the preferred choice, otherwise the terest, due to the incomputer will automatically determine a large compatible numbers 43.3 and 86.5. Moreover, as the length of integration in (10) depends on the value of , it will be shorter for a smaller value of . Thus, as shown in (12), the simulation (14) This formula is exemplified in Fig. 2 for a generic cycle . varies during the integration over a cycle . The The step simulator chooses a certain step at the beginning of the cycle and diminishes the step value when the integration approaches a switching instant. The simulator returns to the initial step value after each switching instant. is a complex number, allowing for the calculation of its magnitude and phase, as required by (11). B. Time-Domain Evaluation of the Steady-State Output Waveform (Summary of [23]) Based on progressive analysis of the switches’ positions, a method for the time-domain analysis of cyclically switched circuits with threshold conditions has been developed in [23]. Instead of deriving state-space equations, a modified nodal approach is applied. For the reader’s convenience, a summary of [23] is given here. In this method, the simulator must find the switching sequence in each cycle by validating the position of each switch at each step. In order to illustrate the algorithm, a generic steady-state cycle is considered. Assume that the topology has been validated at the beginning of an integration step . The capacitor voltages and inductor currents calculated at this time are con. By sistent initial conditions for the next interval assuming that within the interval the nodal voltages calculated at remain constant, the capacitor voltages and inductor curare calculated as rents at (15) CHUNG et al.: FUNCTIONS OF POWER ELECTRONICS CIRCUITS USING ANALYSIS OF CIRCUIT WAVEFORMS Fig. 3. Flowchart for the calculation of the ac transfer function at a frequency f . 1030 1031 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 where is the voltage across the branch formed by capacand itor and its equivalent series resistance (ESR), is the voltage across the branch formed by inductor and its series dc resistance , both of them calculated by using the nodal voltages determined at time . is chosen to be smaller than in the circuit each reactive element time constant in order to avoid the degradation of accuracy. , the capacitors are replaced by indepenAt the instant and the inductors by dent voltage sources of values . At this point, independent current sources of values the dynamic circuit has been transformed into a resistive circuit which can be analyzed by an algebraic system of modified nodal equations, in which the feedback circuit is also included. Thus, the nodal voltages and the output signals of the feedback circuit are calculated. The voltages/currents across/through all at switches are calculated at this instant. If the output signals of the feedback circuit point to no change in the switches’ positions and if no contradiction in the polarity of the waveforms associated with the switches appears, the simulator will validate the . present topology at time the driving signal of a switch points to a switching If at action, or if a contradiction between the assumed position of the switches and their associated waveforms’ polarities and appears, proving that a transition took place between , the simulator will backtrack to in order to find the switching instant. The process will be repeated with a reduced is found with step every time, until the switching moment the desired accuracy and will then be recovered to the original (such as value. More sophisticated algorithms for finding the Newton–Raphson algorithm) could be used for the same purpose. The advantage of this elementary approach is its guaranteed convergence for any complex converter. The proposed method does not require solving differential equations or performing inverse Laplace transformation. In [24], a logical representation of Dirac impulses in the frame of a state-space network simulation is presented. Thus, solution of differential equations was necessary. The methods proposed in [25] and [26] require inverse Laplace transformation. In addition, the proposed method has the following advantages. a) By incorporating the parasitic resistive losses of the reactive elements and switches, the simulator does not generate Dirac impulses. b) To validate each topology, resistive circuit analyses have to be performed, (in some other methods, dynamic circuits must be analyzed). c) At each step, the solution is given by solving an algebraic system of nodal equations. According to (14), the simulator will collect the data not only but over a period for one steady-state cycle of duration . C. Interface Between the Time-Domain Simulation and Calculation of At each step of the time-domain integration during the peand in (14) must be stored. riod , the values of is the For the th cycle and the th step, it starts at . (a) (b) (c) Fig. 4. (a) Boost PWM converter. (b) Magnitude characteristic of the control-to-output transfer function. (c) Phase characteristic of the control-to-output transfer function. value of the output voltage at the beginning of this step. If the simulator finds that no switching action took place within the will be used as the value of and step in (14) is calculated. The output the product in voltage calculated at the end of the step is used as (14) for the next step. The simulator continues the time-domain integration for a new step by keeping constant. This value is a . candidate for and a transition If the simulator finds that between and repeats the process with a took place, it backtracks to smaller step, let’s say . This new value of the step is used in in the product of . The new (14) as CHUNG et al.: FUNCTIONS OF POWER ELECTRONICS CIRCUITS USING ANALYSIS OF CIRCUIT WAVEFORMS 1032 (a) (b) Fig. 5. (a) Current-programmed boost converter. (b) Magnitude characteristic of the control-to-output transfer function. is . is used as for the next step. The simulator continues the integration with this new step, until it comes closer to the switching instant when a further reduction of the step value will be required. At the end of the cycle , the sum in (14) is determined by taking into account the partial prodcalculated for all valid steps, in which no ucts switching took place. A flowchart of this algorithm is given in Fig. 3. III. ILLUSTRATIVE EXAMPLES In the following examples, perturbations of 1% of the steadystate values in either the line voltage or the control variable are considered. In all examples, the magnitude and phase characteristics of the small-signal control-to-output transfer characteristics have been obtained by using three methods, including a) the experimental measurement; b) the proposed algorithm; and c) the state-space averaging technique. The measured results are obtained by using a gain phase analyzer HP4194A. In the time-domain simulation of the circuits (Section II-B), if the absolute current flowing through a switch is less than 10 A, the computer will take the current as zero and a switching instant is assumed. This is a constant requirement in the algorithm. Though this may introduce errors in the simulation, it has been illustrated in [23] that the simulated results are in close agreement with the method in [26]. A. Example 1—Open-Loop Boost Converter The same boost converter analyzed in [20] is considered. The circuit is shown in Fig. 4(a). The component values are V, H, , F, , , and kHz and the steady-state is 0.4. The control-to-output and line-to-output duty cycle transfer characteristics are shown in Fig. 4(b) and (c). With the proposed algorithm, the simulation time for determining the characteristics at 1.0075 kHz on a 486 33-MHz PC computer was 14 s. As shown in Fig. 3, the simulation time is dependent on the frequency of interest . The simulation time will be shorter in determining high-frequency characteristics, 1033 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 (c) (d) (e) Fig. 5. (Continued.) (c) Phase characteristic of the control-to-output transfer function. (d) Magnitude characteristic of the line-to-output transfer function. (e) Phase characteristic of the line-to-output transfer function. since the value of in (12) is smaller. Totally 50 frequency points are taken. The simulated curve is fitted with a simple straight-line interpolation technique. Compared to the averaging technique, the proposed method is slower in computation because the results of the averaging technique is based on a derived continuous time-invariant transfer function. However, the pro- cedures of performing the mathematical formulations are circuit-dependent and time-consuming for circuits with multiple feedback loops and many topologies in one switching cycle. It can be observed that the above three analysis methods give the same results at the low-frequency range up to 15 kHz, while the averaging technique deviates from the measured ones at the CHUNG et al.: FUNCTIONS OF POWER ELECTRONICS CIRCUITS USING ANALYSIS OF CIRCUIT WAVEFORMS 1034 (a) (b) Fig. 6. (a) Switched-capacitor-based dc-to-dc converter. (b) Control-to-output magnitude response. high frequency range. Beyond 15 kHz, the averaging method gives a transfer characteristics below 20 dB, but the experimental results show that some resonant peaks appear around the switching frequency.This is because the high-frequency information has been discarded in the averaging process. The results of the proposed method and the one in [20] show close agreement with the measured ones over the frequency range. However, comparing these two methods, some mathematical exbut the pressions in [20] vanished at proposed algorithm is still feasible to perform analysis at these frequencies, such as at 40.3 kHz and 80.6 kHz (i.e., equals and , respectively). Another advantage of the proposed method is that it is not circuit specific and does not require considerable mathematical manipulations as in [20]. B. Example 2—Current-Programmed Boost Converter The next example is a current-programmed boost converter, which has been analyzed in [4] and [8]. The circuit is shown in Fig. 5(a), consisting of a minor current feedback loop around the power stage and a major voltage feedback loop via the error amplifier. In order to calculate the control-to-output transfer characteristics, the external loop is open and a small perturbation is applied to the dc control signal and the internal current loop is not affected. The control-to-output and line-to-output transfer characteristics are shown in Fig. 5(b)–(e). Compared to the results obtained by the averaging techniques in [4] and [8], they give accurate results at a low-frequency range up to few hundred Hertz, but fail to determine the responses accurately at a 1035 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 (c) (d) (e) Fig. 6. (Continued.) (c) Control-to-output phase response. (d) Line-to-output magnitude response. (e) Line-to-output phase response. high frequency range. The averaging technique can predict accurately the cutoff frequency at about 10 Hz, but fails to predict the zero and pole at about 3 kHz and 12 kHz, respectively, in both characteristics. Nevertheless, the proposed method can predict their existences. The simulation time for getting the responses at 1 kHz is 20 s on the same computer. C. Example 3—Switched-Capacitor Converter A new type of switching-mode converter [27] that primarily consists of semiconductor switches and capacitors is simulated. The circuit diagram is shown in Fig. 6(a). The converter is operkHz. The control-to-output and line-to-output ated at CHUNG et al.: FUNCTIONS OF POWER ELECTRONICS CIRCUITS USING ANALYSIS OF CIRCUIT WAVEFORMS transfer characteristics are shown in Fig. 6(b)–(e). The simulation time for getting the responses at 1 kHz is 12 s on the same computer. Again, it can be seen that with the averaged model is only possible to obtain responses at a relatively low frequency, such as the cutoff frequency at 1 kHz. Starting from one third of , the results of the averaged model show deviation from the actual circuit responses. The existence of the zero at around 30 kHz cannot be predicted, whereas the proposed method can find it. Hence, the proposed method can generally give a closer prediction of the actual circuit frequency response than the averaging technique. In practice, design of the switching regulator loop gain usually has the crossover frequency at a low frequency. It seems that the averaging technique is sufficient for guaranteeing regulator stability. However, this is not always true. For instance, the results of the averaging technique deviate from the actual response at one tenth of the switching frequency in Example 2 and one third of the switching frequency in Example 3. Thus, the validity of the averaging technique at low-frequency responses might not be guaranteed. Finally, apart from getting high-frequency responses, the advantages of the proposed method also lie in the generality of analysis and the possibility of getting information in a switching cycle. It is also possible to obtain a regulator’s large signal response by injecting larger magnitude of perturbation, which is an adjustable parameter. IV. CONCLUSION A technique for simulating cyclically switching circuits with internally controlled switches was presented. By combining a previously developed time-domain simulation analysis technique, the proposed method features the following characteristics. a) It is general for analysis of dc/dc converters. It requires no previous knowledge of the converter operation since the switching sequence is found automatically by the simulator. No threshold conditions have to be given. It does not require formulating or solving state-space equations and can be applied even for the calculation of line-to-output transfer functions of closed-loop regulators containing minor internal feedback loops, which affect the value of the duty-cycle in steady state (see Example 2). The method is close in spirit to that used in [20], but these characteristics give the superiority of the presented algorithm. The method can also be applied to circuits, in which ac signals are involved. However, the side bands between the ac signal frequency or its and frequency components multiples and the or their multiples would appear in the output spectrum. The algorithm cannot find the magnitude and phase of the transfer functions at those frequencies, because it cannot discern between the contributions of the ac input signals. Therefore, this gives a voltage and the and limitation on the proposed method for analysis of ac-dc or dc-ac converters. b) It is faithful to reality. The simulator validates the correct position of the switches, ensuring that the simulated 1036 topology is in accordance with the actual circuit operation. c) It is fast. In order to calculate the describing functions, the simulator stores the steady-state data of the output waveform step by step. These data are simply found by solving a simple algebraic system of modified nodal equations. d) It is accurate. Unlike the averaging and discrete or sampled data approaches, no small-ripple approximations are required. Parasitic resistance of the reactive and switching elements is inherently included in the simulation models. e) It is time saving for the user and memory efficient for the computer. It does not require hand formulation of state-space equations for each topology and solving exact analytical solutions. The algorithm only requires solving systems of algebraic equations. The illustrated examples show the superiority of the proposed method over the classical available algorithms. Further research will be dedicated into the analysis of resonant circuits such as the zero-current-transition PWM converter in [28] and largesignal analysis. REFERENCES [1] D. Czarkowski and M. K. Kazimierczuk, “Linear circuit models of PWM flyback and buck/boost converters,” IEEE Trans. Circuits Syst. I, vol. 39, pp. 688–693, Aug. 1992. [2] H. Sira-RamPrez and M. Delgado de Nieto, “A lagrangian approach to averaging modeling of pulsewidth-modulation controlled DC-to-DC power converters,” IEEE Trans. Circuits Syst. I, vol. 43, pp. 427–430, May 1996. [3] M. K. Kazimierczuk and R. Craven II, “Input impedance of closed-loop PWM buck-boost DC–DC converter for CCM,” in Proc. Int. Symp. Circuits Systems, 1995, pp. 2047–2050. [4] R. D. Middlebrook, “Modeling current-programmed buck and boost regulators,” IEEE Trans. Power Electron., vol. 4, pp. 36–52, Jan. 1989. [5] A. Ioinovici, “A new computer-aided approach to the analysis of Cuk converter by using the alternor equations,” IEEE Trans. Power Electron., vol. 4, pp. 319–330, Jul. 1989. [6] Y. S. Lee, “A systematic and unified approach to modeling switches in switch-mode power supplies,” IEEE Trans. Ind. Electron., vol. 32, pp. 445–448, Nov. 1985. [7] K. T. Chau, Y. S. Lee, and A. Ioinovici, “Computer-aided modeling of quasiresonant converters in the presence of parasitic losses by using the MISSCO concept,” IEEE Trans. Ind. Electron., vol. 38, pp. 455–462, Dec. 1991. [8] D. Kimhi and S. Ben-Yaakov, “A SPICE model for current mode PWM converters operating under continuous inductor current conditions,” IEEE Trans. Power Electron., vol. 6, pp. 281–286, Apr. 1991. [9] V. Vorperian, “Simplify your PWM converter analysis using the model of the PWM switch,” VPEC, vol. 3, pp. 8–13, 1988. [10] F. C. Y. Lee, R. P. Iwens, Y. Yu, and J. E. Triner, “Generalized computer-aided discrete time-domain modeling and analysis of DC-DC converters,” IEEE Trans. Ind. Electron. Contr. Instrumentat., vol. 26, pp. 58–69, May 1979. [11] A. Luchetta, S. Manetti, M. C. Piccirilli, and A. Reatti, “Frequency domain analysis of DC–DC converters using a symbolic approach,” in Proc. Int. Symp. Circuit Systems, 1995, pp. 2043–2046. [12] M. Zarudi and A. Shenkman, “Analysis of common switching converters using Z transform,” IEEE Trans. Circuits Syst. I, vol. 40, pp. 602–605, Sept. 1993. [13] G. C. Verghese, M. E. Elbuluk, and J. G. Kassakian, “A general approach to sampled-data modeling for power electronic circuits,” IEEE Trans. Power Electron., vol. 1, pp. 76–89, Apr. 1986. [14] P. Maranesi, “Small-signal circuit modeling in the frequency-domain by computer-aided time domain simulation,” IEEE Trans. Power Electron., vol. 7, pp. 83–88, Jan. 1992. [15] A. S. Kislovski, “On the role of physical insight in small-signal analysis of switching power converters,” in Proc. IEEE Applied Power Electronics Conf., Mar. 1993, pp. 624–630. 1037 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 47, NO. 7, JULY 2000 [16] R. D. Middlebrook, “Describing function properties of a magnetic pulsewidth modulator,” IEEE Trans. Aerosp. Electron. Syst., vol. AES-9, no. 3, pp. 386–398, May 1973. , “Predicting modulator phase lag in PWM converter feedback [17] loops,” in Proc. Eighth Int. Solid-State Power Electronics Conf., Apr. 1981. [18] E. X. Yang, F. C. Lee, and M. Jovanovic, “Small-signal modeling of LCC resonant converter,” in Proc. IEEE Power Electronics Speialists Conf., 1992, pp. 941–948. , “Small-signal modeling of series and parallel resonant con[19] verters,” in Proc. IEEE Applied Power Electronics Conf., 1992, pp. 785–792. [20] R. Tymerski, “Frequency analysis of time-interval-modulated switched networks,” IEEE Trans. Power Electron., vol. 6, pp. 287–295, Apr. 1991. , “Application of the time-varying transfer function for exact small[21] signal analysis,” IEEE Trans. Power Electron., vol. 9, pp. 196–205, Mar. 1994. [22] A. K. S. Bhat, “A fixed-frequency modified series-resonant converter: analysis, design, and experimental results,” IEEE Trans. Power Electron., vol. 10, pp. 766–775, Nov. 1995. [23] H. Chung and A. Ioinovici, “Fast computer-aided simulation of switching power regulators based on progressive analysis of the switches’ state,” IEEE Trans. Power Electron., vol. 9, pp. 206–212, Mar. 1994. [24] A. Massarini and M. K. Kazimierczuk, “A new representation of Dirac impulses in time-domain computer analysis of networks with ideal switches,” in Proc. IEEE Int. Symp. Circuits Systems, 1996, pp. 565–568. [25] N. Femia and V. Tucci, “An optimized method for the time domain analysis of switched RLC networks,” in Proc. IEEE Int. Symp. Circuits Systems, 1996, pp. 569–572. [26] D. Bedrosian and J. Vlach, “Time-domain analysis of networks with internally controlled switches,” IEEE Trans. Circuits Syst. I, vol. 39, pp. 199–212, Mar. 1992. [27] S. V. Cheong, H. Chung, and A. Ioinovici, “Inductorless DC-to-DC converter with high power density,” IEEE Trans. Ind. Electron., vol. 41, pp. 208–215, Apr. 1994. [28] G. Hua, E. X. Yang, Y. Jiang, and F. C. Lee, “Novel zero-current-transition PWM converters,” IEEE Trans. Power Electron., vol. 9, pp. 601–606, Nov. 1994. Henry S.-H. Chung (S’92–M’95) received the B.Eng. (First Class Hons.) degree in electrical engineering and the Ph.D. degree from The Hong Kong Polytechnic University in 1991 and 1994, respectively. Since 1995 he has been with the City University of Hong Kong, Kowloon, Hong Kong, where he is currently an Associate Professor in the Department of Electronic Engineering. His research interests include time- and frequency-domain analysis of power electronic circuits, switched-capacitor-based converters, random-switching techniques, digital audio amplifiers, and soft-switching converters. He has authored two research book chapters and over 105 technical papers including 47 refereed journal papers in the current research area. Dr. Chung was the recipient of the China Light and Power Prize and was awarded the Scholarship and Fellowship of the Sir Edward Youde Memorial Fund in 1991 and 1993, respectively. He is currently Chairman of the Council of the Sir Edward Youde Scholar’s Association and IEEE Student Branch Counselor. He was Track Chair of the technical committee on power electronics circuits and power systems of IEEE Circuits and Systems Society in 1997-1998. He is presently an Associate Editor of the IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS I. Adrian Ioinovici (M’84–SM’85) received the Electrical Engineering degree in 1974 and the Doctor-Engineer degree in 1981, both in Romania. In 1982, he joined the Holon Academic Institute of Technology, Israel, where he is currently the Head of the Electrical and Electronics Engineering Department. From 1990–1995, he was Reader and then Professor with the Electrical Engineering Department, Hong Kong Polytechnic University. His research interests are in simulation of power electronics circuits, switched-capacitor-based converters and inverters, and soft-switching dc power supplies. He is the author of the book Computer-Aided Analysis of Active Circuits (New York: Marcel Dekker, 1990). He has published more than 80 papers in circuit theory and power electronics. Prof. Ioinovici is Chairman of the Technical Committee on Power Systems and Power Electronics of the IEEE Circuits and Systems Society. He has served as an Associate Editor of the IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—PART I: FUNDAMENTAL THEORY AND APPLICATIONS and of the Journal of Circuits, Systems and Computers. He is also an Overseas Advisor of the IEICE Transactions, Japan. He was Chairman of the Israeli chapter of the IEEE CAS Society between 1985–1990. He served as General Chairman of the Conferences ISCSC’86, ISCSC’88 (Herzlya, Israel), SPEC’94 (Hong Kong), organized and chaired special sessions in Power Electronics at ISCAS’91, ISCAS’92, ISCAS’95, ISCAS’2000, and was a member of the Technical program Committee at the Conferences ISCAS’91, ISCAS’93, ISCAS’94, ISCAS’95. PESC’92, PESC’93, PESC’94, PESC’95, Track Chairman at ISCAS’96, ISCAS’99, ISCAS’2000, and a Cochairman of the Special Session’s Committee at ISCAS’97. Jun Zhang was born in Tianjin, China in 1967. He received the B.Eng and M.Eng degrees in mechanical engineering from Hebei University of Technology, Tianjin, China, in 1989 and 1995, respectively. From 1989 to 1992, he was with the Tianjin Automobile Industry Company Ltd., Tianjin, China, where he was responsible for new automobile development and technology cooperation. During 1995–1996, he was a Research Student and Teaching Assistant at Zhejiang University, Hangzhou, China. He is currently a Research Student in the Department of Electronic Engineering, City University of Hong Kong, working toward the Ph.D. degree. His research interests are in the area of power electronics, genetic algorithm, fuzzy logic, neural network, and chaotic time series analysis and prediction. He has authored 12 technical papers in his current research area.