A Simple CMOS-Based Membership Function Circuit | SpringerLink
advertisement

Analog Integrated Circuits and Signal Processing, 32, 83–88, 2002
C 2002 Kluwer Academic Publishers. Manufactured in The Netherlands.
A Simple CMOS-Based Membership Function Circuit
MAHMUT TOKMAKÇI∗ , MUSTAFA ALÇI AND RECAI KILIÇ
Erciyes University, Department of Electronic Engineering, 38039, Kayseri, Turkey
E-mail: tokmakci@erciyes.edu.tr
Abstract. In this study, design and analysis of a voltage-input current-output simple CMOS-based Membership
Function Circuit (MFC) is presented. The proposed MFC is based on simple OTA structure and current-mode
maximum circuits. This MFC implements basic four membership functions (trapezoidal, triangle, Z-shape and
S-shape). The characteristics (width, height, slope and position) of the implemented membership functions are
easily adjustable and it is suitable for current-mode fuzzy hardware. While the circuit’s membership function
characteristics have been confirmed by PSPICE-DC simulations, the circuit’s transient response has been analyzed
applying up to 10 MHz input signals in continuous time by PSPICE Transient simulations.
Key Words: membership function circuit, current-mode fuzzy hardware
I.
Introduction
Recently, fuzzy theory has been applied extensively
to control and expert systems [1–10]. In addition to
the theoretical studies, there have been many hardware implementations of fuzzy systems. These implementations of fuzzy systems include analog [1–3],
digital [4–6], and mixed-signal [7–12] building circuit
blocks. Analog circuits present several advantages in
front of digital ones, especially regarding speed of processing, power dissipation and functional density. They
can moreover perform continuous-time processing and
have the particularity to be well compatible with sensors, actuators and all other analog signals. On the other
hand, digital circuits are superior to analog circuits in
accuracy, extendibility, and easy of design automation.
The mixed-signal Fuzzy Logic Controllers (FLC) have
essentially analog circuit structures. However, control
and coordinating signals are generated with digital circuits and/or systems for fuzzy inference while fuzzy
processing is analog form. Such a mixed-signal fuzzy
hardware system offers the advantages of both analog
and digital circuit structures.
In mixed-signal and analog implementations, it is
most preferable the CMOS-based designs and currentmode circuit building blocks, due to the requirements
∗ Corresponding
author.
of high speed, low power and reduced system chip size
[7–10]. So in this study, a current-mode MFC which
is voltage-input current-output is proposed. This MFC
has capability of generation of basic four membership
functions.
II.
Circuit Description
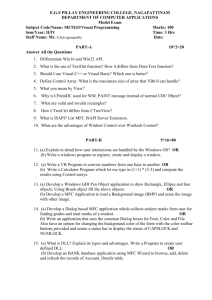
The building block of proposed Membership Function
Circuit (MFC) is shown in Fig. 1. This MFC is composed of two simple OTA structures, two current-mode
maximum circuits (C-Max), a N-MOS current mirror
(CM), and two current sources (Ipeak , Ilevel ). OTA circuit
structure used in Fig. 1 for designing MFC is shown in
Fig. 2.
OTA circuit has simple and basic hardware. Output
current of OTA is defined as follows:
Iout =
√
KI b (Vin+ − Vin− )
(1)
where K is technological parameter which depends on
device geometry and process.
The circuit diagram of each maximum circuit [13]
used in MFC and its DC response are shown in Fig. 3(a)
and 3(b), respectively. As shown in Fig. 3(b), maximum circuits used in proposed MFC structure operate according to positive input currents. For providing
84
Tokmakçı, Alçı and Kılıç
Imfc
VL1 VL2
Ipeak
Ib1
Ilevel
VL2
gm1
Imax1
Vin
C-Max1
VL1
Imax2
Ipeak
CM
Imfc
1:1
C-Max2
gm2
Vin
VL1 VL2
IR
IL
Ilevel
VL1 VL2
Ib2
Fig. 1. The building block of the proposed MFC.
VDD
M1
M2
M3
M5
M6
Iout
Vin
Vin
M7
M4
Ib
(I R , I L ), respectively. When bias currents are equal, the
transconductances of two OTAs will be equal. In this
case, triangular or trapezoidal functions in symmetric
form can be obtained.
First current-mode maximum circuit (C-Max1 )
maximizes the piecewise linear output characteristics
of two OTAs. The output currents of two OTAs (I L , I R )
are defined equations (2) and (3).
I L = gm2 (VL1 − Vin )
where gm2 =
I R = gm1 (Vin − VL2 )
where gm1 =
√
√
KI b2
(2)
KI b1
(3)
M8
The output current of C-Max1 circuit is expressed by:
Imax1 = max{I L , I R }
VSS
Fig. 2. Simple OTA circuit structure.
more linear response, C-Max1 circuit eliminates the
nonlinear characteristics in negative region of OTAs.
This behavior of C-Max1 also determines central points
of membership function as VL1 and VL2 which are
zero-crossing points of OTAs. For linearization of the
nonlinear characteristics of OTAs in positive region,
a current mirror, which inverts the output of C-Max1 ,
and second maximum circuit C-Max2 are used in MFC
structure.
Bias currents, Ib1 and Ib2 are adjustable to determine the slopes of left and right OTA output currents
(4)
In order to provide that MFC operates in linear range
of output membership function, second current-mode
maximum circuit (C-Max2 ) is used as a normalization
part of MFC. Here, while Ipeak current source is used to
determine the peak level of the output signal Imfc , Ilevel
current source is used to determine the base level of
the output signal Imfc . In our study, the base level of the
output signal is fixed to zero level. The output current
of C-Max2 circuit which constitutes the current output
of the proposed MFC is given by
Imfc = max{(Ipeak − Imax1 ), Ilevel }
(5)
where Imax1 current is equivalent to −I max2 due to
current mirror CM.
A Simple CMOS-Based Membership Function Circuit
85
VDD
M9
M8
I2
I1
I1
Imax
M7
M6 M5
M3
M2
Imax
M4
I2
C-MAX
M1
VSS
(a)
50 A
0 A
–10 A
–50 A
–50A –40A
I2
I1
–20A
0A
I2
20A
40A 50A
Inputs of MAX circuit
50A
0A
–50A
–50A –40A
Imax
–20A
0A
I2
20A
40 uA 50A
output of MAX circuit
(b)
Fig. 3. (a) Current-mode maximum circuit and its block diagram. (b) DC response of current-mode maximum circuit (I1 = −10 µA,
−50 µA < I2 < 50 µA).
III.
Simulation Results
The simulation results of basic four membership functions implemented by proposed MFC are
shown in Fig. 4. In our simulation experiments,
the circuit parameter values are determined as follows: Ib1 = Ib2 = 25 µA, Ipeak = 25 µA, Ilevel = 0 µA
and supply voltages, VDD = 5 V and VSS = −5 V.
While triangular function is obtained on condition
that VL1 = VL2 , trapezoidal function is obtained on
86
Tokmakçı, Alçı and Kılıç
30A
30A
20A
20A
Imfc
10A
Imfc
10A
0A
0V
1.0V
2.0V
3.0V
4.0V
5.0V
Vin
0A
0V
0.5V
1.0V
(a)
30A
20A
20A
Imfc
10A
Imfc
10A
1.0V
2.0V
2.5V
3.0V
(a)
30A
0A
0V
1.5V
Vin
2.0V
3.0V
4.0V
5.0V
Vin
0A
0V
1.0V
2.0V
Vin
(b)
3.0V
4.0V
5.0V
(b)
30A
Fig. 5. MFC position tunability (a) for triangular form, and (b) for
trapezoidal form.
20A
Imfc
10A
0A
0V
1.0V
2.0V
3.0V
4.0V
5.0V
3.0V
4.0V
5.0V
Vin
(c)
30A
20A
Imfc
10A
0A
0V
1.0V
2.0V
cuit [14]. Whereas, the proposed MFC in this study
has capability of generating four standard membership
functions without extra devices.
The position tunability of MFC is shown in Fig. 5(a)
and (b) for triangular and trapezoidal functions, respectively. The position tunability is realized by adjusting
both VL1 and VL2 voltages.
Figure 6(a) and (b) show the width tunability of
MFC towards right and left, respectively. The width
Vin
(d)
30A
Fig. 4. The basic membership function output graphs of proposed
MFC (Ib1 = Ib2 ). (a) Triangle (VL1 = VL2 = 2.0 V), (b) Trapezoidal
(VL1 = 1.0 V, VL2 = 1.5 V), (c) Z-shape (VL1 = 0 V, VL2 = 2.0 V),
and (d) S-shape (VL1 = 3.0 V, VL2 = VDD ).
20A
Imfc
10A
0A
0V
condition that VL2 > VL1 (Fig. 4(a) and (b)). If the position adjusting voltages are determined as VL1 = 0 V and
0 < VL2 < VDD (5 V), output function of MFC will be
Z-shape form depending on VL2 (Fig. 4(c)). If these
voltages are determined as VL2 = VDD and 0 <
VL1 < VDD , output function of MFC will be S-shape
form depending on VL1 (Fig. 4(d)). Most of the membership function circuits in literature [10–11] have
been designed to provide two membership functions
as triangle and trapezoidal shapes in general. In addition to triangle and trapezoidal functions, for generating Z-shape and S-shape membership functions extra
devices are required in original membership cir-
0.5V
1.0V
1.5V
2.0V
Vin
2.5V
3.0V
3.5V
4.0V
4.5V
5.0V
(a)
30A
20A
Imfc
10A
0A
1.5V
2.0V
2.5V
3.0V
3.5V
Vin
(b)
Fig. 6. Width tunability of proposed MFC (a) Right directions, and
(b) Left directions.
A Simple CMOS-Based Membership Function Circuit
30A
87
1.0V
0.5V
20A
Imfc
10A
0V V
in
40A
20A
0A
1.5V
2.0V
2.5V
Vin
3.0V
3.5V
0A
0s
Imfc
2s
4s
6s
Time
8s
10s
12s
2.0s
2.5s
3.0s
Frequency of Input Signal = 250 khz
(a)
(a)
30A
1.0V
20A
0.5V
Imfc
10A
0A
1.5V
0V V
in
40A
2.0V
2.5V
Vin
3.0V
3.5V
20A
0A
0s
(b)
Imfc
0.5s
1.0s
Frequency of Input Signal = 1 Mhz
1.5s
Time
(b)
Fig. 7. MFC slope tunability (a) Right side, and (b) Left side.
1.0V
0.5V
tunability of MFC is realized by fixing one of the voltages VL1 and VL2 , and the other changing.
In Fig. 7(a) and (b), the slope tunability of MFC
with triangular form is shown. These figures have been
obtained by fixing one of the bias currents, Ib1 and Ib2 ,
and the other changing.
The transient response of MFC with 250 kHz,
1 MHz, 2 MHz, and 8 MHz input signals as triangle
form is shown in Fig. 8(a), (b), (c), and (d), respectively. As shown in Fig. 8, the output waveform of
proposed circuit is able to preserve approximately the
original form when applying input signals up to frequency 8 MHz. Here, maximum delay time is less
than 70 ns.
IV.
Conclusion
A CMOS-based MFC with voltage-input currentoutput has been designed and analyzed. Its behavior was confirmed by Pspice simulation experiments.
Due to simplicity of OTA circuits, this MFC has a
simple hardware. Basic four membership functions
(trapezoidal, triangle, Z-shape and S-shape) can be implemented by this MFC. The characteristics (width,
height, slope and position) of the implemented membership functions are easily adjustable and it is suitable
for current-mode fuzzy hardware.
0V V
in
40A
20A
0A
0s
Imfc
0.5s
1.0s
1.5s
Time
Frequency of Input Signal = 2 Mhz
(c)
1.0V
0.5V
0V V
in
40A
20A
0A
0s
Imfc
100ns
Frequency of Input Signal = 8 Mhz
200ns
Time
300ns
375ns
(d)
Fig. 8. The transient response of the proposed MFC with
(a) 250 kHz, (b) 1 MHz, (c) 2 MHz, (d) 8 MHz triangular input signals. In figures, while upper trace shows input signal, lower trace
shows output of MFC.
References
1. Ascia, G. and Catania, V., “A high performance processor for
applications based on fuzzy logic.” FUZZ-IEEE ’99 IEEE V.
Fuzzy Systems International Conference Proc. 3, pp. 1685–1690,
1999.
2. Khoei, A., Hadidi, K. and Peyravi, H., “Analog realization
of fuzzifier and defuzzifier interfaces for fuzzy chips.” Fuzzy
Information Processing Society—NAFIPS ’98 Conference of
the North American, pp. 72–76, 1998.
88
Tokmakçı, Alçı and Kılıç
3. Wilamowski, B. M., “Analog VLSI hardware for fuzzy systems.”
IEEE Industrial Electronics Society IECON ’98 Proceedings of
the 24th Annual Conference 1, pp. 52–55, 1998.
4. Sultan, L., “FDSP: a VLSI core for adaptive fuzzy and digital
signal processing applications.” ISCAS ’98 IEEE International
Symposium on Circuits and Systems Proc. 3, pp. 123–126, 1998.
5. Sánchez-Solano, S., Barriga, Á., Jimenez, C. J. and Huertas,
J. L., “Design and application of digital fuzzy controllers.” IEEE
the Sixth International Conference on Fuzzy Systems Proc. 2,
pp. 869–874, 1997.
6. Patyra, M. J., Grantner, J. L. and Koster, K., “Digital fuzzy logic
controller: design and implementation.” IEEE Trans. on Fuzzy
Systems 4(4), pp. 439–459, 1996.
7. Alarcón, E., Iannazzo, M., Madrenas, J., Moreno, J. M.,
Gombriz, S., Guinjoan, F. and Poveda, A., “Implementation of an application-specific fuzzy controller by means
of a mixed-signal sequential architecture.” IEEE Midwest
Symposium on Circuits and Systems Proc. pp. 430–433,
1998.
8. Bouras, S., Suyama, K. and Tsividis, Y., “Integrated fuzzy logic
controller with continuous processing.” IEEE the Fifth International Conference on Fuzzy Systems Proc. 3, pp. 1951–1957,
1996.
9. Çilingiroğlu, U., Pamir, B., Günay, Z. S. and Dülger, F.,
“Sampled-analog implementation of application-specific fuzzy
controllers.” IEEE Trans. on Fuzzy Systems 5(3), pp. 431–442,
1997.
10. Baturone, I., Sánchez-Solano, S., Barriga, Á. and Huertas,
J. L., “Implementation of CMOS fuzzy controllers as mixedsignal integrated circuits.” IEEE Trans. on Fuzzy Systems 5(1),
pp. 1–19, 1997.
11. Bouras, S., Kontronakis, M., Suyama, K. and Tsividis, Y.,
“Mixed analog-digital fuzzy logic controller with continuousamplitude fuzzy inferences and defuzzification.” IEEE Trans.
on Fuzzy Systems 6(2), pp. 205–215, 1998.
12. Rodrı́guez-Vázques, A., Navas, R., Delgado-Restituto, M. and
Vidal-Verdú, F., “A modular programmable CMOS analog fuzzy
controller chip.” IEEE Trans. on Circuits and Systems-II 46(3),
pp. 251–265, 1999.
13. Baturone, I., Huertas, J. L., Barriga, Á. and Sánchez-Solano, S.,
“Current-mode multi-input max circuit.” IEE Electronics Letters
30(9), pp. 678–680, 1994.
14. Carvajal, R. G., Torralba, A., Colodro, F. and Franquela, L. G.,
“Mixed-signal CMOS fuzzifier with emphasis in power consumption.” IEEE 42nd Midwest Symp. on Circuits and Systems
2, pp. 929–933, 2000.