17th
IFAC
Symposium
on
System
Identification
17th
IFAC
Symposium
on
System
Identification
17th
IFAC
Symposium
on
System
Identification
Beijing
International
Convention
Center
17th
IFAC
Symposium
on
System
Identification
Beijing
International
Convention
Center
17th
IFAC
Symposium
on
System
Identification
Beijing
International
Convention
Center
October
19-21,
2015.
Beijing,
China
Available online at www.sciencedirect.com
Beijing
International
Convention
Center
OctoberInternational
19-21, 2015.
2015. Convention
Beijing, China
China
Beijing
Center
October
19-21,
Beijing,
October
October 19-21,
19-21, 2015.
2015. Beijing,
Beijing, China
China
ScienceDirect
IFAC-PapersOnLine 48-28 (2015) 063–068
Real-time
Demodulation
of
Real-time
Demodulation
of
Real-time
Demodulation
of
Real-time
Demodulation
Real Power
Power Oscillations
Oscillations of
Real
Real
Real Power
Power Oscillations
Oscillations Real
Real
Real
Real
Power
Real
Power
Power
Power
Power
[MW]
[MW]
[MW]
[MW]
[MW]
∗
∗∗
∗∗
Xin
Xin Zhao
Zhao ∗∗∗ Maurice
Maurice L.
L. ∗J.
J. van
van de
de Ven
Ven ∗∗
∗∗ ∗∗∗
Xin
Zhao
Maurice
L.
J.
van
de
Ven
Xin
Zhao
Maurice
L.
J.
van
de
Ven
∗
∗∗ ∗∗∗
∗
Raymond
A. de
de
Callafon
William
Torre
Xin
Zhao
Maurice
L.
van
de
Ven
∗J.William
∗∗∗
Raymond
A.
Callafon
Torre
∗ William Torre ∗∗∗
Raymond
A.
de
Callafon
Raymond
A.
de
Callafon
∗ William Torre ∗∗∗
Raymond A. de Callafon William Torre
∗
∗
Mechanical
and
Aerospace
Engineering,
University
of
∗ Department of
of
Mechanical
and
Aerospace
Engineering,
University
of
∗ Department
Department
of
Mechanical
and
Aerospace
Engineering,
University
of
Department
of
Mechanical
and
Aerospace
Engineering,
University
of
∗California,
San
Diego,
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
Department
of
Mechanical
and
Aerospace
Engineering,
University
of
California,
San
Diego,
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
California, San
San
Diego,
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
California,
Diego,
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
(e-mail:
xiz028@ucsd.edu;
callafon@ucsd.edu)
California,
San
Diego,
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
(e-mail:
xiz028@ucsd.edu;
callafon@ucsd.edu)
(e-mail:
xiz028@ucsd.edu;
callafon@ucsd.edu)
∗∗
(e-mail:
xiz028@ucsd.edu;
callafon@ucsd.edu)
∗∗
of
Mechanical
Engineering,
Eindhoven
University
of
(e-mail:
xiz028@ucsd.edu;
callafon@ucsd.edu)
∗∗ Department
of
Mechanical
Engineering,
Eindhoven
University
of
∗∗ Department
Department
of
Mechanical
Engineering,
Eindhoven
University
of
of
Mechanical
Engineering,
Eindhoven
University
of
∗∗ Department
Technology,
5600
MB
Eindhoven,
The
Netherlands
Department
of
Mechanical
Engineering,
Eindhoven
University
of
Technology,
5600
MB
Eindhoven,
The
Netherlands
Technology,
5600
MB
Eindhoven,
The
Netherlands
Technology,
5600
MB
Eindhoven,
The
Netherlands
(e-mail:
m.l.j.v.d.ven@student.tue.nl)
Technology,
5600
MB
Eindhoven,
The
Netherlands
(e-mail:
m.l.j.v.d.ven@student.tue.nl)
(e-mail:Research,
m.l.j.v.d.ven@student.tue.nl)
∗∗∗
(e-mail:
m.l.j.v.d.ven@student.tue.nl)
∗∗∗ Center for Energy
University
(e-mail:Research,
m.l.j.v.d.ven@student.tue.nl)
∗∗∗
Center for
for Energy
Energy
Research,
University of
of California,
California, San
San Diego
Diego
∗∗∗ Center
University
of
California,
San
Diego
for
Energy
Research,
University
of
California,
San
∗∗∗ Center 9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
Center 9500
for
Energy
Research,
University
of
California,
San Diego
Diego
Gilman
Drive,
La
Jolla,
CA
92093,
USA
9500
Gilman
Drive,
La
Jolla,
CA
92093,
USA
9500
Drive,
La
Jolla,
CA
92093,
USA
(e-mail:
wtorre@ucsd.edu)
9500 Gilman
Gilman
Drive,
La
Jolla,
CA
92093,
USA
(e-mail:
wtorre@ucsd.edu)
(e-mail:
wtorre@ucsd.edu)
(e-mail:
(e-mail: wtorre@ucsd.edu)
wtorre@ucsd.edu)
Abstract:
In
this
paper,
a
real-time
demodulation
of
real
power
oscillations
in
aa three
phase
Abstract:
In
this
paper,
aa real-time
demodulation
of
real
power
oscillations
in
phase
Abstract:
In
this
paper,
real-time
demodulation
of
real
power
oscillations
in
aa three
three
phase
Abstract:
In
this
paper,
a
real-time
demodulation
of
real
power
oscillations
in
three
phase
electric
power
system
is
proposed.
It
is
shown
how
demodulated
real
power
oscillations
can
be
Abstract:
In
this
paper,
a
real-time
demodulation
of
real
power
oscillations
in
a
three
phase
electric
power
system
is
proposed.
It
is
shown how
how demodulated
demodulated real
real power
power oscillations
oscillations can
can
be
electric
power
system
is
proposed.
It
is
shown
be
electric
power
system
is
proposed.
It
is
shown
how
demodulated
real
power
oscillations
can
be
used
to power
formulate
a low
low
order
stateItspace
space
modelhow
that
models power
power
oscillations.
The procedure
procedure
electric
system
is
proposed.
is
shown
demodulated
real
power
oscillations
can
be
used
to
formulate
a
order
state
model
that
models
oscillations.
The
used
to
formulate
a
low
order
state
space
model
that
models
power
oscillations.
The
procedure
used
to
a
order
model
that
models
power
oscillations.
is
illustrated
on
the
obtained
used
to formulate
formulate
a low
lowmeasurements
order state
state space
space
modelfrom
that three
modelsphase
powerResistor-Inductor-Capacitor
oscillations. The
The procedure
procedure
is
illustrated
on
the
measurements
obtained
from
three
phase
Resistor-Inductor-Capacitor
is
illustrated
on
the
measurements
obtained
from
three
phase
Resistor-Inductor-Capacitor
is
illustrated
on
the
measurements
obtained
from
three
phase
Resistor-Inductor-Capacitor
(RLC)
network
where
the
power
oscillation
frequency
and
model
order
is
known
and
used
is
illustrated
on
the
measurements
obtained
from
three
phase
Resistor-Inductor-Capacitor
(RLC)
network
where
the
power
oscillation
frequency
and
model
order
is
known
and
used
(RLC)
network
where
the
power
oscillation
frequency
and
model
order
is
known
and
used
(RLC)
network
where
the
power
oscillation
frequency
and
model
order
is
known
and
used
for
comparison
and
validation
of
the
method.
(RLC)
network
where
the
power
oscillation
frequency
and
model
order
is
known
and
used
for
comparison
and
validation
of
the
method.
for
comparison
and
validation
of
the
method.
for
comparison
and
validation
of
the
method.
for
comparison
and
validation
of
the
method.
© 2015, IFAC (International Federation of Automatic Control) Hosting by Elsevier Ltd. All rights reserved.
Keywords:
Micro-Grid; Real-Time
Demodulation; Real
Power Oscillations;
Step-Based
Keywords:
Real-Time
Keywords: Micro-Grid;
Micro-Grid;
Real-Time Demodulation;
Demodulation; Real
Real Power
Power Oscillations;
Oscillations; Step-Based
Step-Based
Keywords:
Micro-Grid;
Real-Time
Demodulation;
Real
Power
Oscillations;
Step-Based
Realization
Algorithm.
Keywords:
Micro-Grid;
Real-Time
Demodulation;
Real
Power
Oscillations;
Step-Based
Realization
Realization Algorithm.
Algorithm.
Realization
Algorithm.
Realization Algorithm.
1.
INTRODUCTION
University
of
California
during
aa particular
load
switching
1.
INTRODUCTION
University
of
California
during
load
switching
1. INTRODUCTION
INTRODUCTION
University
of
California
during
aa particular
particular
load
switching
1.
University
of
California
during
particular
load
switching
(de
Callafon
and
Wells,
2014).
1. INTRODUCTION
University
of
California
during
a
particular
load
switching
(de Callafon
Callafon and
and Wells,
Wells, 2014).
2014).
(de
(de
Callafon
and
Wells,
2014).
As
more
renewable
energy
generation
is
added
to
the
(de
Callafon
and
Wells,
2014).
As
more
renewable
energy
generation
is
added
to
the
electric
power
systems
are
subjected
to
power
As more
more
renewable
energy generation
generation
iswill
added
to the
the In
In general,
general,
electric
power
systems
are
subjected
to
power
As
renewable
energy
is
added
to
utility
grid,
less
conventional
generation
be
required
general,
electric
power
systems
are
subjected
to
power
As
more
renewable
energy generation
iswill
added
to the In
utility
grid,
less
conventional
generation
will
be required
required
In
general,
electric
power
systems
are
subjected
to
power
oscillations
due
to
the
inherent
inertia
of
generators
and
utility
grid,
less
conventional
generation
be
In
general,
electric
power
systems
are
subjected
to
power
oscillations due
due to
to the
the inherent
inherent inertia
inertia of
of generators
generators
and
utility
grid,
less
conventional
generation
will
be
required
to
meet
the
power
demand.
Photovoltaics
(PV),
the
major
oscillations
and
utility
grid,
less
conventional
generation
will
be
required
to
meet
the
power
demand.
Photovoltaics
(PV),
the
major
oscillations
due
to
the
inherent
inertia
of
generators
and
loads
connected
on
the
electric
grid
(Elgerd,
1982;
Akagi
to
meet
the
power
demand.
Photovoltaics
(PV),
the
major
oscillations
due
to
the
inherent
inertia
of
generators
and
loads
connected
on
the
electric
grid
(Elgerd,
1982;
Akagi
to
meet
the
power
demand.
Photovoltaics
(PV),
the
major
way
of
converting
sunlight
into
electricity,
is
a
fast-growing
loads
connected
on
the
electric
grid
(Elgerd,
1982;
Akagi
to
meet
the
power
demand.
Photovoltaics
(PV),
the
major
way
of
converting
sunlight
into
electricity,
is
a
fast-growing
loads
connected
on
the
electric
grid
(Elgerd,
1982;
Akagi
et
al.,
2007).
Such
power
oscillations
are
typically
in
the
way
of
converting
sunlight
into
electricity,
is
a
fast-growing
loads
connected
on
the
electric
grid
(Elgerd,
1982;
Akagi
et
al.,
2007).
Such
power
oscillations
are
typically
in
the
way
of
converting
sunlight
into
electricity,
is
a
fast-growing
technology
doubling
its
worldwide
installed
every
et
al.,
2007).
Such
power
oscillations
are
typically
in
the
way
of converting
sunlight
into electricity,
is capacity
a fast-growing
technology
doubling
its
worldwide
installed
capacity
every
et
al.,
2007).
Such
power
oscillations
are
typically
in
the
0.2-3
Hz
range,
depending
on
the
size
of
the
(micro)grid
technology
doubling
its
worldwide
installed
capacity
every
et
al.,
2007).
Such
power
oscillations
are
typically
in
the
0.2-3
Hz
range,
depending
on
the
size
of
the
(micro)grid
technology
doubling
its
worldwide
installed
capacity
every
couple
of
years
due
to
its
scalability
from
small,
residential
0.2-3
Hz
range,
depending
on
the
size
of
the
(micro)grid
technology
doubling
its
worldwide
installed
capacity
every
couple
of
years
due
to
its
scalability
from
small,
residential
0.2-3
Hz
range,
depending
on
the
size
of
the
(micro)grid
and
the
characteristics
of
the
interconnected
power
syscouple
of
years
due
to
its
scalability
from
small,
residential
0.2-3
Hz
range,
depending
on
the
size
of
the
(micro)grid
and the
the characteristics
characteristics of
of the
the interconnected
interconnected power
power syssyscouple
of
years
due
to
its
scalability
from
small,
residential
and
commercial
rooftop
or
building
integrated
installaand
couple
of years due
to its scalability
from
small, residential
and
commercial
rooftop
or
building
integrated
installaand
and commercial
commercial
rooftop
or solar
building
integrated
installaand the
the characteristics
characteristics of
of the
the interconnected
interconnected power
power syssysand
rooftop
or
building
integrated
installations,
to
large
utility-scale
plants.
Typically,
solar
and
commercial
rooftop
or
building
integrated
installations,
to
large
utility-scale
solar
plants.
Typically,
solar
10.5
tions,
to
large
utility-scale
solar
plants.
Typically,
solar
10.5
tions,
to
large
utility-scale
solar
plants.
Typically,
solar
energy
generation
uses
(3
phase)
that
have
fast
10.5
tions,
large utility-scale
solar inverters
plants. Typically,
solar
energy
generation
uses
(3
phase)
inverters
that
have
fast
10.5
energyto
generation
usesvery
(3 phase)
phase)
inverters
that have
have
fast
10.5
energy
generation
uses
(3
inverters
that
fast
dynamics
and
exhibit
little
inertia
in
terms
of
power
energy
generation
uses
(3
phase)
inverters
that
have
fast
dynamics
and
exhibit
very
little
inertia
in
terms
of
power
dynamicsonto
andthe
exhibit
very
little inertia
inertia in
in terms
terms of
of power
power
10
dynamics
and
exhibit
very
little
10
delivery
utility
grid
10
dynamics
andthe
exhibit
very
little inertia in terms of power
delivery
onto
utility
grid
10
delivery
onto
the
utility
grid
10
delivery
onto
the
utility
grid
delivery onto
the
utility grid
Utilizing
more
renewable
energy
generation
leads
to
in9.5
Utilizing
more
renewable
energy
generation
leads
to
in9.5
Utilizing
more
renewable
energy
generation
leads
to
in9.5
Utilizing
more
energy
generation
leads
inherent
variability
in
energy
production.
However,
it
also
9.5
Utilizing
more renewable
renewable
energy
generation
leads it
toalso
inherent
variability
in
energy
production.
However,
itto
also
9.5
herent variability
variability
in energy
energy
production.
However,
herent
in
production.
However,
it
also
reduces
the
rotational
inertia
in
the
form
of
spinning
herent
variability
in energy
production.
However,
it also
9
reduces
the
rotational
inertia
in
the
form
of
spinning
reduces
the
rotational
inertia
in
the
form
of
spinning
9
9
reduces
the
rotational
inertia
the
of
rotational
mass
from conventional
conventional
generation
that
tends to
to
9
reduces
the
rotational
inertia in
ingeneration
the form
form that
of spinning
spinning
rotational
mass
from
tends
9
rotational
mass
from
conventional
generation
that
tends
to
rotational
mass
from
conventional
generation
that
tends
to
stabilize
and
maintain
synchronous
operation
of
the
sysrotational
mass
from
conventional
generation
that
tends
to
stabilize
and
maintain
synchronous
operation
of
the
sys8.5
stabilize
and 1982).
maintain
synchronous
operation
of instabilthe syssys8.5
stabilize
and
maintain
synchronous
operation
of
the
8.5
tem
(Elgerd,
This
could
result
in
increasing
stabilize
and 1982).
maintain
synchronous
operation
of instabilthe sys8.5
tem
(Elgerd,
This
could
result
in
increasing
tem
(Elgerd,
1982).
This
could
result
in
increasing
instabil8.5
tem
(Elgerd,
1982).
This
could
result
in
increasing
instability
and
poorly
damped
oscillations
in
AC
frequency
and
tem
(Elgerd,
1982).
This
could
result
in
increasing
instability
and
poorly
damped
oscillations
in AC
AC frequency
frequency and
and
8
ity
and
poorly
damped
oscillations
in
8
ity
and
poorly
damped
oscillations
in
AC
frequency
and
power,
unless
additional
conventional
generating
sources
8
ity
and unless
poorlyadditional
damped oscillations
in generating
AC frequency
and
power,
conventional
sources
8
power,
unless
additional
conventional
generating
sources
8
power,
unless
additional
conventional
generating
sources
are
placed
on-line
or
less
renewable
resources
are
installed.
power,
unless
additional
conventional
generating
sources
are
placed
on-line
or
less
renewable
resources
are
installed.
7.5
are
placed
on-line
or
less
renewable
resources
are
installed.
7.5
are
on-line
renewable resources
are installed.
7.5
are placed
placed
on-line or
or less
less
resources
installed.
7.5
Such
circumstances
haverenewable
been detected
detected
in are
practice
and
7.5
Such
circumstances
have
been
in
practice
and
Such
circumstances
have
been
detected
in
practice
and
Such
circumstances
have
been
detected
in
practice
and
installation
of
Phasor
Masurement
Units
(PMU)
facilitate
7
Such
circumstances
have
been
detected
in
practice
and
installation
of
Phasor
Masurement
Units
(PMU)
facilitate
7
installation
of Phasor
Phasor Masurement
Masurement
Units (PMU)
(PMU)
facilitate
7
installation
of
Units
facilitate
7
real-time
measurements
of
power
quality
and
power
oscilinstallation
of
Phasor
Masurement
Units
(PMU)
facilitate
real-time
measurements
of
power
quality
and
power
oscil7
real-time
measurements
of
power
quality
and
power
oscilreal-time
measurements
of
power
quality
and
power
oscillations
in
an
electricity
grid.
An
example
of
such
power
6.5
real-time
measurements
of
power
quality
and
power
oscillations
in
an
electricity
grid.
An
example
of
such
power
6.50
lations in
in an
an
electricity
grid.
An
example
of
such power
power
5
10
15
20
25
30
6.50
lations
grid.
such
5
10
15
20
25
30
oscillations
canelectricity
be observed
observed
in An
Fig.example
1, where
whereof
oscillations
in
6.50
time15
[sec]
5
10
20
25
30
lations
in an
electricity
grid.
An
example
of
such power
oscillations
can
be
in
Fig.
1,
oscillations
in
6.50
time15
[sec]
5
10
20
25
30
oscillations
can
be
observed
in
Fig.
1,
where
oscillations
in
time15
[sec]
0
5
10
20
25
30
oscillations
can
be
observed
in
Fig.
1,
where
oscillations
in
real
power
were
observed
in
the
12kV
connections
at
the
time
[sec]
oscillations
can
be
observed
in
Fig.
1,
where
oscillations
in
real
power
were
observed
in
the
12kV
connections
at
the
time
[sec]
real power
power were
were observed
observed in
in the
the 12kV
12kV connections
connections at
at the
the
real
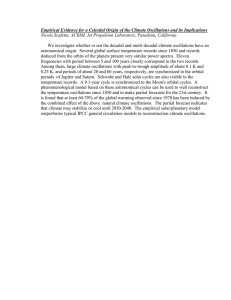
Fig.
1.
Measured
real
power
oscillation
on
the
main
3
phase
real
power
were
observed
in the
12kV
connections
atComthe Fig.
1.
Measured
real
power
oscillation
on
the
main
3
phase
This
work
was
partly
supported
by
the
California
Energy
Fig.
1.
Measured
real
power
oscillation
on
the
main
3
phase
This
work
was
partly
supported
by
the
California
Energy
Com
Fig.
1.
Measured
real
power
oscillation
on
the
main
3
phase
This
work
was
partly
supported
by
the
California
Energy
Cominterconnect
of
the
UCSD
Micro-Grid
during
a
step
Fig.
1.
Measured
real
power
oscillation
on
the
main
3
phase
mission
(CEC)
Energy
Innovations
Small
Grant
Program
(EISG),
This
work
was
partly
supported
by
the
California
Energy
Cominterconnect
of
the
UCSD
Micro-Grid
during
a
step
interconnect
of
the
UCSD
Micro-Grid
during
a
stepmission
(CEC)
Energy
Innovations
Small
Grant
Program
(EISG),
This work
wasEnergy
partlyInnovations
supported by
the Grant
California
Energy
Commission
(CEC)
Small
Program
(EISG),
interconnect
of
the
UCSD
Micro-Grid
during
a
stepwise
load
demand
change.
Grant
No.
57648k/i
3-08
#.
mission
(CEC)
Energy
Innovations
Small
Grant
Program
(EISG),
interconnect
of
the
UCSD
Micro-Grid
during
a
stepwise
load
demand
change.
Grant
No.
57648k/i
3-08
#.
mission
(CEC)
Energy
Innovations
Small
Grant
Program
(EISG),
wise
load
demand
change.
Grant
No.
57648k/i
3-08
#.
wise
load
demand
change.
Grant No. 57648k/i 3-08 #.
wise load demand change.
Grant No. 57648k/i 3-08 #.
Copyright
©
IFAC
2015
63
2405-8963 ©
2015,
IFAC (International Federation of Automatic Control)
Hosting by Elsevier Ltd. All rights reserved.
Copyright
©
IFAC
2015
63
Copyright
©
IFAC
2015
63
Copyright
©
IFAC
2015
63
Peer
review
under
responsibility
of
International
Federation
of
Automatic
Copyright © IFAC 2015
63 Control.
10.1016/j.ifacol.2015.12.101
2015 IFAC SYSID
October 19-21, 2015. Beijing, China
64
Xin Zhao et al. / IFAC-PapersOnLine 48-28 (2015) 063–068
Sensors
Controller
PV
System
V
V
Switch
Circuit
Breaker
GRID
V
L1
EMI
Filter
Grid-Tied
Inverter
A
A
L2
A
L3
Auxiliary
Relay
R-L-C Load Circuit
Overload
Protection
Contactor
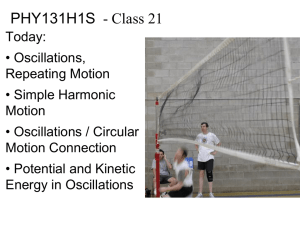
Fig. 2. Diagram of experimental setup with DC power supply simulating the PhotoVoltaic (PV) power source, an EMI
filter to reduce AC ground coupling and a Grid-Tied Inverter (GTI) to provide 3 phase AC power. The GTI is
controlled by an external controller that can control the four quadrant power flow through the GTI, while the
controller also digitally switches an auxiliary relay to switch in a three phase Resistor-Inductor-Capacitor (RLC)
circuit to initiate three phase power oscillations in the circuit. Three phase voltage and current measurements
(sensors) are processed by the controller to compute real-time power oscillation in the circuit.
analyzing how three phase real power oscillations can be
measured in real-time by an appropriate demodulation and
filtering of three phase AC voltages and currents.
tems (Kundur et al., 1994; Rogers, 2000). Detecting fluctuations in power flow in an electric grid has been an
active field of study to improve the resiliency of electric
networks. Power swing detectors that can detect unstable
power swings in several milli-seconds are crucial for relay
operation (Hemmingsson, 2003). In case of stable power
oscillations, frequency and damping of electro-mechanical
oscillations can be performed with a ring down analysis or a normal operation analysis. Assuming an unknown non-zero initial condition, eigenvalues or the frequency/damping of the observed power oscillations can be
computed using the Pronys method for ring down analysis
(Hauer et al., 1990; Pierre et al., 1992; Sanchez-Gasca and
Chow, 1999) assuming the power oscillation is a sum of
sinusoids (Trudnowski and Pierre, 2009) or more advanced
methods using wavelet transforms (Rueda et al., 2011).
In these methods, power oscillation dynamics is found by
fitting models on the free response of an observed stable
power oscillation.
The proposed real-time demodulation included in this paper ensures that three phase real power oscillations can be
demodulated from transient effects of AC network. Subsequently, it is shown how a low order state space model
can be realized on the basis of real-time measurements of
three phase real power oscillations. The realization algorithm specifically uses the transient effects to formulate a
low order model that accurately captures frequency and
damping of the power oscillations. The approach is similar
to the modal analysis approach in Rogers (2000) but allows
the low order models to be formulated directly on the basis
of real-time power oscillations. To verify the effectiveness
of the approach, the methodology is illustrated on the measurements obtained from three phase RLC network where
the power oscillation frequency and model order is known
and used for comparison and validation of the method.
The approach shows how the power oscillation frequency
can be recovered from the real-time measurements.
The disturbance causing power oscillations can be a line
switching, load switching, a fault or anything else that
may have a large impact on the power flow through the
power system. As these disturbances are typically step disturbances, explicit information on the shape of the input
signal that caused the power oscillation will be beneficial,
especially when multiple step signals occur in close proximity in time. Explicit use of input and observed output
signals via a system identification procedure (SanchezGasca and Chow, 1999; Ghasemi, 2006) will improve the
quality of the models that capture the power oscillations.
This paper shows how three phase real measurements can
be used to formulate a low order dynamic model of an
electric (micro) grid by observing power oscillations due
to a load or generation disturbance. This is done by first
2. EXPERIMENTAL SETUP
An experimental setup is required to verify the performance of three phase real power oscillations and possibly
install a real-time damping control system. The experimental setup is used to repeat and initiate the scenario
of an oscillatory three phase power disturbance similar to
what could be observed on the real power grid. As DC
power created by PV panels is exported to the grid via
an inverter, a Grid-Tied Inverter (GTI) is used to synchronize the AC output with the grid. According to such
circuit topology, an experimental setup is built as shown in
Fig. 2. For testing purposes, the PV system is temporarily
64
2015 IFAC SYSID
October 19-21, 2015. Beijing, China
Xin Zhao et al. / IFAC-PapersOnLine 48-28 (2015) 063–068
65
Programmable
DC Power Supply
EMI Filters
Grid-Tied Inverter
Fig. 4. Schematic diagram of feedback control configuration implemented in the testbed for power oscillation
control.
to drive the grid-tied inverter and moreover, to switch in
the load circuit to the system by energizing the overload
protection contactor via an auxiliary relay. The description
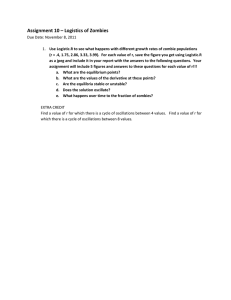
of the testbed is completed by a photo as shown in Fig. 3.
The parts are aligned and mounted in a cabinet for safety
consideration. In the RLC load circuit, an array of AC
capacitors is formed as a capacitive load.
R-L-C Load Circuit
The control diagram of the testbed is depicted in Fig. 4.
The model G represents the grid-tied inverter, while H is
the dynamic model of the RLC load circuit. In this paper,
we are particularly interested in modeling the real power
dynamics of the RLC load circuit by real-time real power
demodulation.
3. REAL-TIME REAL POWER ANALYSIS
For control or mitigation of real or complex power oscillations, special care should be given to the time varying
nature of the moving average values of the power signals.
In the following discussion, the time varying behavior of
the power signals can be derived as a multiplication of
the AC grid frequency ω = 2πf , f = 60Hz and the
oscillations due to power fluctuations that may have a
smaller oscillation frequency fd < f . For real-time control,
only the power oscillations with the frequency fd < f
are of interest and detection of these power oscillations
requires a demodulation of the power signals. The analysis
in this section is in continuous-time cases and can be easily
extended to the discrete-time case.
Fig. 3. Front of the testbed housing the components depicted in Fig. 2 for real-time analysis and identification of real power oscillations.
replaced by a programmable DC power source. The GTI
is a GTI3100A6208/3652IR-PQ manufactured by OneCycle Control Incorporation. It is a four-quadrant GTI,
which is capable to accept external control signals for
implementation of feedback control to control or damped
power oscillations. Additional EMI filters FN2200B are
placed between the DC source and the inverter to eliminate
the effect of common AC mode currents due to the high
frequency Pulse Width Modulation (PWM) of the GTI.
3.1 Analysis of Transient Effects
A three-phase RLC load circuit is designed and integrated
into the testbed to act as a real power disturbance. As
depicted in Fig. 2, each phase is composed by a bypass
resistor of 100Ω that is in parallel with a series connection
of a capacitor of 0.01F and an inductor of 0.1H. The
Inductor-Capacitor (LC) circuit is to generate a resonance;
the bypass resistor is to consume real power and also
discharge the LC circuit while it is not energized. The
circuit is connected to the output of the grid-tied inverter
through an overload protection relay.
For the analysis of the transient effect, it is assumed
that the three-phase voltage signals are time synchronized
according to
(1)
vA (t) = V cos(ωt)
2
(2)
vB (t) = V cos(ωt − π)
3
4
(3)
vC (t) = V cos(ωt − π).
3
and higher order harmonics are ignored initially, to simplify the analysis. It will be shown that low pass filtering
is used to reduce the effect of higher harmonics on the 3
phase AC voltage and current signals.
A controller with National Instruments (NI) myRIO is
integrated into the testbed for data acquisition and controlling the grid-tied inverter. The three-phase AC voltage
and current signal of grid-tied inverter is measured, conditioned, and sent into the controller. The controller can
also send out control signals via signal conditioning circuit
The three-phase symmetric RLC circuit used in this paper
serves as a case study for the power oscillations and is used
65
2015 IFAC SYSID
66
October 19-21, 2015. Beijing, China
Xin Zhao et al. / IFAC-PapersOnLine 48-28 (2015) 063–068
in the derivation of the results. Based on second order
linear time-variant (LTI) dynamics of an RLC circuit, the
transient effects in the current signals can be represented
by
From (6) it is clear that by computing a moving average
over a single period of 2π
ω , the first three cosine terms
in (6) reduce to zero. Moving average filtering can be
implemented in real-time using a discrete-time Finite
Impulse Response (FIR) filter FF IR (q). The last two terms
have a frequency 2ω ± ωd and do not reduce to zero
with a moving average, but since 2ω ± ωd > ωd , these
terms can be reduced significantly by a discrete-time low
pass filter FLP (q) with a cut-off frequency just above ω.
Low pass filtering will also reduce any higher harmonics
that may be present on the 3 phase voltage and current
signals. Hence, through filtering and modulation, a power
signal PdA (t) = F (q)pA (t) cos(ωt) is obtained that can be
approximated by
V Id
AF (ωd ) ·
cos(ωtd )eλt cos(ωd t − β + φ(ωd ))
(7)
2
where F (q) = FF IR (q)FLP (q) is the discrete-time filter
combination of the FIR filter and a low-pass filter as
described above, AF (ωd ) and φ(ωd ) are the gain and the
phase shift of filter F (q) at the frequency ωd , respectively.
For the other two phases, the same procedure can be
applied to obtain the modulated real power PdB (t) for
phase B given by
V Id
2
AF (ωd ) ·
cos(ωtd − π)eλt cos(ωd t − β + φ(ωd )) (8)
2
3
and the modulated real power PdC (t) for phase C as
V Id
4
AF (ωd ) ·
cos(ωtd − π)eλt cos(ωd t − β + φ(ωd )) (9)
2
3
The modulated real power signals for each phase can now
be used to compute the three phase real power oscillations.
iA (t) = I cos(ωt − α) + IdA eλt cos(ωd t − β)
IdA = Id cos(ωtd )
2
iB (t) = I cos(ωt − α − π) + IdB eλt cos(ωd t − β)
3
2
IdB = Id cos(ωtd − π)
3
4
iC (t) = I cos(ωt − α − π) + IdC eλt cos(ωd t − β)
3
4
C
Id = Id cos(ωtd − π)
3
where ωd = 2πfd < ω is the (damped) oscillation frequency of the (power) transient with a phase shift of β
and an exponential decay λ < 0. It should be noted that
due to the three phase time synchronization, each current
signal has a different initial condition IdA , IdB and IdC .
Taking Phase A as an example, the instantaneous power
pA (t) = vA (t)iA (t) can now be written as
pA (t) = V I cos(ωt) cos(ωt − α)
+V Id cos(ωtd )eλt cos(ωt) cos(ωd t − β)
VI
VI
cos α +
cos(2ωt − α)
=
2
2
(4)
V Id
cos(ωtd )eλt cos((ω − ωd )t + β)
+
2
V Id
cos(ωtd )eλt cos((ω + ωd )t − β)
+
2
showing the mixed effects of both the AC frequency ω and
the transient oscillation frequency ωd . The AC frequency
ω may be known, but the (damped) oscillation frequency
ωd < ω with its exponential decay λ may be unknown and
need to be observed from real-time measurements of the
AC power for dynamic modeling and control purposes.
3.3 Reconstruction of Three-Phase Real Power Oscillations
Applying the Clarke transformation to single-phase components obtained from (7), (8) and (9), the phasors are
projected onto a decoupled coordinate α − β given by
1 1
−
1
−
2 √2 √2 PdA (t)
Pα (t)
P (t) =
=
Pβ (t)
3
3 dB
3
PdC (t)
−
0
2
2
V Id λt
cos(ωtd )
AF (ωd ) ·
e cos(ωd t − β + φ(ωd ))
.
sin(ωtd )
2
Then it can be seen that Pα (t)2 + Pβ (t)2 satisfies
2
V Id λt
AF (ωd ) ·
e cos(ωd t − β + φ(ωd ))
2
3.2 Demodulation of Single-Phase Real Power Oscillations
Modulating the instantaneous power of Phase A obtained from (4) with cos(ωt) results in an expression for
pA (t) cos(ωt) given by
VI
cos α cos(ωt)
2
VI
cos(2ωt − α) cos(ωt)
+
2
(5)
V Id
cos(ωtd )eλt cos((ω − ωd )t + β) cos(ωt)
+
2
V Id
cos(ωtd )eλt cos((ω + ωd )t − β) cos(ωt)
+
2
where cos(ωt) = v(t)/V can be obtained from (1). Using
trigonometric identities, the expression for pA (t) cos(ωt) in
(5) can be reorganized to
VI
cos α cos(ωt)
2
VI
VI
cos(ωt − α) +
cos(3ωt − α)
+
4
4
V Id
(6)
cos(ωtd )eλt cos(ωd t − β)
+
2
V Id
cos(ωtd )eλt cos((2ω − ωd )t + β)
+
4
V Id
cos(ωtd )eλt cos((2ω + ωd )t − β)
+
4
In practice, the direction of real power is usually a priori
knowledge. As such, the three-phase real power oscillation
can be reconstructed from the demodulated single-phase
components.
4. CHARACTERIZING POWER OSCILLATION
DYNAMICS BY STEP-BASED REALIZATION
A key assumption that could be made when a power
oscillation occurs is to assume that the power oscillation
is due to a step-wise change in load demand. The size
of the load demand may not be known, but the a priori
knowledge of the step-wise load demand can be exploited
to formulate a low order state space model to model the
dynamics of any observed power oscillations. In particular,
66
2015 IFAC SYSID
October 19-21, 2015. Beijing, China
Xin Zhao et al. / IFAC-PapersOnLine 48-28 (2015) 063–068
the low order state space model can be realized on the
basis of a real-time measurements of three phase real power
oscillations to accurately model frequency and damping of
the power oscillations. Although the approach is similar
to the modal analysis approach in Rogers (2000), the
proposed realization method in this paper allows the low
order models to be formulated directly on the basis of realtime measurements of power oscillations. More details on
the step-based realization algorithms in included below.
67
Improved estimates of B and D may also be found
via a least-squares minimization. Given estimates Â
and Ĉ, let B̂ and D̂ be the solution of
B̂, D̂ = arg min ||y − ŷ||2
y(0)
ŷ(0)
y(1)
ŷ(1)
, ŷ =
where
y=
..
..
.
.
y(N + i)
ŷ(N
+ i) t−1
B̂
Ĉ Ât−k−1 1 θ̂, θ̂ =
ŷ(t) =
D̂
4.1 The Step-Based Realization Algorithm
k=0
One is referred to Miller and de Callafon (2012) for
additional details on the step realization method.
Let {y(0), y(1), ..., y(N )} be a measured response of an
LTI, single-input-multi-output (SIMO) system to a unitstep input applied at t = 0 that is corrupted by some
possibly-colored measurement noise v(t). To estimate a
state space model of the system
x(t + 1) = Ax(t) + Bu(t)
(10)
y(t) = Cx(t) + Du(t) + v(t),
(11)
4.2 Identification of Real Power Oscillations
In the experimental verification of the real-time real power
demodulation and application of the step-based realization
algorithm, power oscillations are induced by step-wise
excitation of the auxiliary relay depicted earlier in Fig. 2
to switch in a three phase Resistor-Inductor-Capacitor
(RLC) circuit to initiate three phase power oscillations
in the circuit. The input u(t) is used to denote the
digital signal sent to the auxiliary relay; the output y(t)
is the real-time demodulated real power calculated by the
method proposed in the previous section.
one may follow the following steps:
• Step I
Construct the block-Hankel data matrices
y(1) y(2) · · ·
y(l)
y(2) y(3) · · · y(l + 1)
Y =
..
..
...
.
.
y(r) y(r + 1) · · · y(N − 1)
y(2)
y(3) · · · y(l + 1)
y(4) · · · y(l + 2)
y(3)
,
Ȳ =
..
..
..
.
.
.
y(r + 1) y(r + 2) · · · y(N )
and matrices
y(0)
y(0) · · ·
y(1) y(1) · · ·
y(1) · · ·
y(1)
y(2) y(2) · · ·
, M̄ = .
.
M =
..
..
..
..
.
.
.
y(r − 1) y(r − 1) · · ·
y(r) y(r) · · ·
Demodulated Real Power
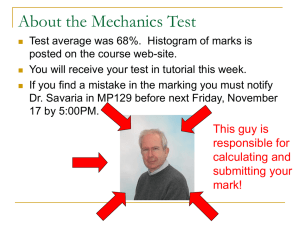
In Fig. 5, u(t) stepped from 0 to 1 at t = 0, the upper
plot shows the demodulated real power of each phase;
the bottom plot shows the demodulated three-phase real
power.
• Step II
Construct matrices
Demodulated Real Power
R = Y −M
R̄ = Ȳ − M̄
then take the singular value decomposition (SVD) of
the matrix R:
Σ 0
R = [Un Us ] n
[Vn Vs ]
(12)
0 Σs
An appropriate system order n may be found from
the range of the singular values in (12).
• Step III
Estimate A as
UnT R̄Vn Σ−1/2
.
 = Σ−1/2
n
n
C is estimated as
Ĉ = (Un Σ1/2
n )(1:ny ,:) .
A possible estimate for B is
100
L1
L2
L3
50
0
−50
−100
0
0.5
1
1.5
2
50
3φ
0
−50
−100
0
0.5
1
Time [sec]
1.5
2
Fig. 5. Demodulated real power signal oscillations in each
phase (top figure) and three phase (bottom figure) of
the RLC circuit induced by a step-wise load change.
The step-based realization algorithm is applied to verify
the proposed method of real power demodulation. The
RLC circuit depicted in Fig. 2 is a second-order system.
With L = 0.1H, C = 0.01F, we know that the (undamped)
oscillation frequency of such an RLC circuit is given by
1
√
= 5.03Hz
(13)
f=
2π LC
T
B̂ = (Σ1/2
n Vn )(:,1) ,
then D is estimated as
D̂ = y(0).
67
2015 IFAC SYSID
68
October 19-21, 2015. Beijing, China
Xin Zhao et al. / IFAC-PapersOnLine 48-28 (2015) 063–068
5. CONCLUSIONS
Demodulated Real Power
50
In this paper, a real-time demodulation of real power oscillation in an electric three phase network is proposed and
it is shown how a low order state space model of the three
phase network can be realized on the basis of real-time
measurements of real power oscillations. The realization algorithm formulates a low order model that can accurately
capture frequency and damping of the power oscillations.
The methodology is illustrated on the measurements obtained from three phase RLC network where the power
oscillation frequency and model order is known and used
for comparison and validation of the method. With an
accurate low-order model, efficient control algorithms can
be implemented to mitigate power oscillations.
0
−50
Measured
Estimated
−100
0
0.5
1
Time [sec]
1.5
2
REFERENCES
Fig. 6. Comparison between measured and modeled/estimated real power oscillation. The model is
a second order linear model with the dynamic effect
of the contactor excluded in the modeling/estimation.
Akagi, H., Watanabe, E.H., and Aredes, M. (2007). Instantaneous power theory and applications to power conditioning, volume 31. John Wiley & Sons.
de Callafon, R. and Wells, C. (2014). Distributed realtime electric power grid event detection and dynamic
characterization. In Proc. of CIGRE US National
Committee 2014 Grid of the Future Symposium.
Elgerd, O.I. (1982). Electric energy systems theory: an
introduction.
Ghasemi, H. (2006). On-line monitoring and oscillatory
stability margin prediction in power systems based on
system identification.
Hauer, J., Demeure, C., and Scharf, L. (1990). Initial
results in Prony analysis of power system response
signals. IEEE Transactions on Power Systems, 5(1),
80–89. doi:10.1109/59.49090.
Hemmingsson, M. (2003). Power system oscillationsdetection, estimation and control. Lund University.
Kundur, P., Balu, N.J., and Lauby, M.G. (1994). Power
system stability and control, volume 7. McGraw-hill New
York.
Miller, D.N. and de Callafon, R.A. (2012). Identification of
linear time-invariant systems via constrained step-based
realization. In Proc. 16th IFAC Symp. Syst. Identificat.
Pierre, D., Trudnowski, D., and Hauer, J. (1992). Identifying linear reduced-order models for systems with
arbitrary initial conditions using Prony signal analysis.
IEEE Transactions on Automatic Control, 37(6), 831–
835. doi:10.1109/9.256344.
Rogers, G. (2000). Power System Oscillations. Springer
US, Boston, MA.
Rueda, J., Juarez, C., and Erlich, I. (2011). WaveletBased Analysis of Power System Low-Frequency
Electromechanical Oscillations.
IEEE Transactions on Power Systems, 26(3), 1733–1743.
doi:
10.1109/TPWRS.2010.2104164.
Sanchez-Gasca, J.J. and Chow, J. (1999). Performance
comparison of three identification methods for the analysis of electromechanical oscillations. IEEE Transactions on Power Systems, 14(3), 995–1002.
doi:
10.1109/59.780912.
Trudnowski, D. and Pierre, J. (2009). Overview of algorithms for estimating swing modes from measured
responses. In Power Energy Society General Meeting,
2009. PES ’09, 1–8. doi:10.1109/PES.2009.5275444.
Demodulated Real Power
50
0
−50
Measured
Estimated
−100
0
0.5
1
Time [sec]
1.5
2
Fig. 7. Comparison between measured and modeled/estimated real power oscillation. The model is
a third order linear model with the dynamic effect of
the contactor included in the modeling/estimation.
In practice, the contactor cannot be fully energized rapidly,
thus it results in additional dynamics in the system.
This can be observed by the irregular oscillation from
t = 0 to t = 0.15s in Fig. 5. To further verify this, the
segment starting from t = 0.15s is selected to estimate a
model. With a second-order state space model, the step
response of the RLC circuit can be reconstructed. By
comparison with the raw demodulated real power as shown
in Fig. 6, it is verified that the model captures very well the
dynamics of the 3 phase RLC system. It also validates the
proposed method of real-time demodulation of real power
oscillation.
If the contactor dynamics is taken into account, a higherorder model can be used to capture this dynamics. As
shown in Fig. 7, a third-order state space model is realized.
The dynamics of the three phase RLC system including the
contactor are both captured by the model.
68