Fast Deconvolution Of Multichannel Systems Using Regularization
advertisement

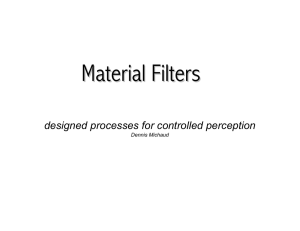
IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 setting a noise detection threshold. From this threshold, a multistage uniform quantizer is used to shape quantization noise to fit the masking curve. The FSM model used to encode the output of the quantizer exploits statistical redundancies in the time, frequency, and stage dimensions, resulting in effective compression of the audio signal. Informal test results show that the proposed audio coder is roughly equivalent in quality to MPEG layer II and performs better than MPEG layer I at the tested bit rates. Its computation demands are reasonable, and it is amenable to hardware and software implementations. However, it should be recognized that MPEG audio coders, unlike this coder, also satisfy certain practical functionalities in addition. Hence, the proposed approach as presented is not a substitute for the standard. Rather, we feel the approach points to some novel alternative quantization and entropy coding components that may be useful in future audio compression systems and standards. ACKNOWLEDGMENT The authors thank the anonymous reviewers for their constructive comments and suggestions. REFERENCES [1] J. Princen, A. Johnson, and A. Bradley, “Subband/transform coding using filterbank designs based on time-domain aliasing cancellation,” in Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, Apr. 1987, pp. 2161–2164. [2] R. N. J. Veldhuis, M. Breeuwer, and R. V. D. Waal, “Subband coding of digital audio signals without loss of quality,” Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, May 1989, pp. 2209–2012. [3] J. D. Johnson, “Transform coding of audio signals using perceptual noise criteria,” IEEE J. Select. Areas Commun., vol. 6, pp. 314–323, Feb. 1988. [4] W.-Y. Chan and A. Gersho, “High fidelity audio transform coding with vector quantization,” in Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, Albuquerque, NM, Apr. 1990, pp. 1109–1112. [5] M. R. Soleymani, “New tandem source-channel trellis coding scheme,” IEEE Trans. Speech Audio Processing, vol. 2, pp. 24–28, Jan. 1994. [6] “Coding of moving pictures and associated audio for digital storage media at up to about 1.5 mbit/s, Pt. 3: Audio,” ISO/IEC JTC1/SC29/WG11 MPEG, IS 11172-3. [7] F. Kossentini, M. Macon, and M. J. T. Smith, “Audio coding using variable-depth multistage quantizers,” in Data Compression Conf., Snowbird, UT, Mar. 1996. [8] H. S. Malvar, Signal Processing with Lapped Transforms. Norwood, MA: Artech House, 1992. [9] E. Zwicker and H. Fastl, Psychoacoustics: Facts and Models. New York: Springer-Verlag, 1990. [10] P. Maragos and R. W. Schafer, “Morphological systems for multidimensional signal processing,” Proc. IEEE, vol. 78, pp. 690–710, Apr. 1990. [11] I. H. Witten, R. M. Neal, and J. G. Cleary, “Arithmetic coding for data compression,” Commun. ACM, vol. 30, pp. 520–540, 1987. [12] F. Kossentini, W. Chung, and M. Smith, “Subband image coding with jointly optimized quantizers,” in Proc. IEEE Int. Conf. Acoustics, Speech, and Signal Processing, Detroit, MI, May 1995, pp. 2221–2224. , “Conditional entropy-constrained residual VQ with application to [13] image coding,” Trans. Image Processing: Spec. Issue Vector Quantizat., vol. 5, pp. 311–320, Feb. 1996. [14] , “A jointly optimized subband coder,” IEEE Trans. Image Processing, vol. 5, pp. 1311–1323, Sept. 1996. [15] P. G. Howard and J. S. Vitter, “Design and analysis of fast text compression based on quasiarithmetic coding,” Inform. Processing Manage., vol. 30, pp. 777–790, 1994. 189 Fast Deconvolution of Multichannel Systems Using Regularization Ole Kirkeby, Philip A. Nelson, Hareo Hamada, and Felipe Orduna-Bustamante Abstract— A very fast deconvolution method, which is based on the fast Fourier transform (FFT), can be used to control the outputs from a multichannel plant comprising any number of control sources and error sensors. The result is a matrix of causal finite impulse response filters whose performance is optimized at a large number of discrete frequencies. I. INTRODUCTION D ECONVOLUTION is useful for many practical applications, and there is a vast amount of literature covering the different aspects of the problem (see, e.g., [1, chap. 10] or [2]). We are interested in deconvolution techniques for the purpose of designing digital filters for multichannel sound reproduction. More specifically, given a set of S loudspeakers, the objective is to reproduce a desired sound field at R points in space as accurately as possible. This principle is applied by the so-called cross-talk cancellation systems that are used for reproducing binaural recordings over two loudspeakers [3]–[5]. In this case, a 2 2 2 matrix of digital filters is used to compensate for both the room response and the response of the loudspeakers, and also to cancel the cross-talk from the left loudspeaker to the right ear and vice versa [6]–[9]. A related problem is that of achieving perfect “dereverberation” of a room response at one microphone position by using two digital filters to calculate the input to two loudspeakers [10]. In this correspondence, we present a very fast method for calculating a matrix of digital filters that can be used to control the outputs from a multichannel plant. This method is typically several orders of magnitude faster than the time domain methods that have previously been investigated [6], [10], [11]. It combines the wellknown principles of least squares inversion in the frequency domain [12], [13], and the zeroth-order regularization method [14, chap. 18] which is traditionally used when one is faced with an ill-conditioned inversion problem [15, chap. 2]. II. SYSTEM DESCRIPTION The inversion problem is shown in block diagram form in Fig. 1. We assume that the system is working in discrete time, and so the conventional z -transform notation is used [16, chap. 7]. The variables are defined as follows. u(z ) is a vector of T observed signals, v(z ) is a vector of S source input signals, w(z ) is a vector of R reproduced signals, d(z ) is a vector of R desired signals, and e(z ) is a vector of Manuscript received February 3, 1996; revised April 10, 1997. This work was first published in an ISVR Technical Report, April 1996, which was subsequently reproduced in the IEICE Transactions on Fundamentals of Electronics, Communications, and Computer Sciences, vol. E80–A, pp. 809–820, May 1997. The associate editor coordinating the review of this manuscript and approving it for publication was Dr. Dennis R. Morgan. O. Kirkeby and P. A. Nelson are with the Institute of Sound and Vibration Research, Southampton University, Highfield, Southampton SO17 1BJ, U.K. (e-mail: pan@isvr.soton.ac.uk). H. Hamada is with the Department of Electrical and Communications Engineering, Tokyo Denki University, Tokyo 101, Japan. F. Orduna-Bustamante is with the Seccion de Acoustica, Centro de Instrumentos, UNAM, Circuito Exterior CU, Mexico DF. Publisher Item Identifier S 1063-6676(98)01688-5. 1063–6676/98$10.00 1998 IEEE 190 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 ( A) H () have been omitted from the scalar where the subscript m; elements of m;A z for convenience. The elements Crs z of z are the z -transforms of the impulse responses crs n of the z is assumed to be a causal multichannel plant. Each element sequence of finite length. Thus, the z -transform of crs n is of the form N 01 Crs z crs n z 0n crs crs z 01 n=0 1 1 1 crs Nc 0 z0(N 01) : (3) C( ) C( ) ( )= Fig. 1. The discrete-time multichannel deconvolution problem in block diagram form. () () () () = (0) + (1) + + ( 1) The elements Art (z ) of A(z ) are also assumed to represent causal finite length sequences. The maximum number of coefficients in the elements of A(z ), and C(z ) are denoted by Na and Nc , respectively. The elements of Hm;A (z ) will later (in Section IV) be constrained to be causal finite length sequences whose maximum number of coefficients is Nh , but the analysis that follows (in Section III) imposes only the constraint of stability on the optimal filters. From the block diagram shown in Fig. 1, it is straightforward to derive the following relationships: v(z) = Hm;A (z)u(z) w(z) = C(z)v(z) d(z) = z0m A(z)u(z) and 2 Fig. 2. The geometry of a 4 4 system. Four microphone positions are obtained by rotating a KEMAR dummy head by 5 and by 5 relative to facing straight ahead. + 0 and (1b) e(z) = [E1(z) 1 1 1 ER(z)]T: (1e) A( ) C( ) H () (1a) (1c) (1d) H () C( ) u H () A( ) A(z) = C(z) = and Hm;A (z) = C( ) A11(z) 1 1 1 A1T (z) .. . .. .. . .. . .. . RT z 1S z .. . (2a) AR1 (z) 1 1 1 A ( ) C11(z) 1 1 1 C ( ) . CR1(z) 1 1 1 CRS (z) H11(z) 1 1 1 H1T (z) .. . .. . .. . ST z HS1 (z) 1 1 1 H ( ) (6) (7) A( ) u( ) From (6) it is seen that the function of the target matrix z is to define the desired signals z in terms of the observed signals z . d( ) III. EXACT LEAST SQUARES DECONVOLUTION u(z) = [U1(z) 1 1 1 UT (z)]T v(z) = [V1(z) 1 1 1 VS (z)]T w(z) = [W1(z) 1 1 1 WR(z)]T d(z) = [D1(z) 1 1 1 DR(z)]T The matrices z; z , and m;A z represent multichannel z is an R 2 T target matrix, z is an R 2 S plant filters. matrix, and m;A z is an S 2 T matrix of optimal filters. The component z 0m delays all the elements of by an integer number of m samples. This delay is usually referred to as a modeling delay. It is crucial to include a modeling delay in order to ensure that it is possible to achieve a good performance from the optimal filters under the constraint that they be causal. This paper describes a method for z; determining a matrix of causal optimal filters m;A z given z , and m. The matrices have the following structures: A( ) (5) e(z) = d(z) 0 w(z): R performance error signals. All vectors are column vectors written as (4) This section outlines the theory upon which the fast deconvolution algorithm is based. We show how to calculate a matrix of optimal filters that are ideal in the sense that they are constrained to be stable, but not constrained to be either causal or of finite duration. Consequently, they are generally not realizable in practice. However, when the modeling delay and the regularization parameter are set appropriately, the fast deconvolution algorithm will essentially return a range of coefficients that are a close approximation to the ideal filters, and so the properties of these filters are crucial. A. The Exact Least Squares Solution =0 (no modeling delay). We first consider the case when m For the purpose of defining 0;A_ z uniquely, the complex variable z is constrained to be on the unit circle, jz j , by substituting j! for z , where is the sampling interval and ! is the angular frequency [16]. This is equivalent to constraining the impulse reponse of a filter with a given z -transform to be stable, but it does not guarantee that the impulse response is causal [17]. A cost function J is defined as the sum of two terms: a “performance error” term H , which is a measure of how well the desired signals are reproduced at the transducers, and an “effort penalty” term H , which is a measure proportional to the total input power to all the sources. The denotes the Hermitian operator which transposes and superscript conjugates its argument [18, p. 343]. For a system working in discrete time, the total cost J as a function of frequency is given by H ej!1 ej!1 H ej!1 ej!1 : (8) J ej!1 H () 1 exp( 1) =1 ee vv H (2b) : (2c) ( )=e ( )e( )+ v ( )v( ) The positive real number is a regularization parameter that determines how much weight to assign to the effort term [19], [20]. By varying from zero to infinity, the solution changes gradually from minimizing only the performance error to minimizing only the effort IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 191 Fig. 3. The impulse responses crs (n) of the 16 HRTF’s derived from the geometry shown in Fig. 2. The “matrix form” is used to illustrate the position of each of the HRTF’s in (n). C 0 v ) = [C ( )C( ) + I] 2 CH (ej!1)A(ej!1 )u(ej!1 ): cost [14, chap. 18]. When > ; J is minimized in the least squares sense by a vector opt of source inputs that are given by H ej!1 ej!1 01 ej!1 vopt ( (9) This solution is unique regardless of the dimensions and the rank of . Consequently, if is to take its optimal value opt for any choice of , then according to (4) 0;A must be given by 0;A ej!1 H ej!1 ej!1 01 H ej!1 ej!1 (10) C u v H ( [C ( )= )C( v H ) + I] C ( )A( ) assuming that no modeling delay is used (m = 0). Since exp(j!1) conjugated is equal to exp(0j! 1), the z -transform of H0;A (z ) then becomes H0;A (z) = [CT(z01 )C(z) + I]01CT(z01 )A(z): (11) () at any other transducers, d2 z is ideally reproduced perfectly at transducer number two and not observed at any other transducers, z does not have to be a square matrix; the and so on. Note that number of control sources and error sensors need not be the same. One reason why the cross-talk cancellation problem deserves special attention is that once 0;I z is known it is a trivial task to calculate 0;A z since C( ) H () H () H0;A (z) = H0;I (z)A(z) (13) as seen from (11) and (12). This means that the cross-talk cancellation problem is in a sense a “worst-case” problem. If it is possible to solve the cross-talk cancellation problem, it is possible to solve the deconvolution problem for any target matrix. Another reason for considering 0;I z specifically in the context of sound reproduction is that this matrix is necessary for reproducing binaural recordings over loudspeakers [9]. H () C. The Effect of Regularization B. The Generalized Cross-Talk Cancellation Matrix d( ) In the special case where the desired signals z are identical to z is an identity matrix of the observed signals z , the matrix order R T , and so the optimal filters are given by u( ) = A( ) H0;I (z) = [CT(z01 )C(z) + I]01CT(z01 ): matrix H0;I (z ) is referred to as the generalized (12) The cross-talk cancellation matrix [9] (this term is also used when m is not zero [21], [22]). This matrix of filters achieves the best (best in the frequency domain least squares sense) reproduction of each of the desired signals dr z at transducer number r. Thus, d1 z is ideally reproduced perfectly at transducer number one and not observed () () Since a large value of means that the optimal solution will favor a low power output from the inverse filters at the expense of a high performance error, it is evident that can be used to control the power output from the optimal filters. It is important to note that can be used to control the “duration” of the inverse filters, and thereby provide a way to avoid the undesirable “wrap-around” effect usually associated with filter design methods based on sampling in the frequency domain. It turns out that regularization essentially controls the longest time constant of the optimal filters [22], and in order to ensure that the value of this time constant is not too long or too short, the regularization parameter must be set appropriately. If is too small, there will be sharp peaks in the frequency responses 192 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 C Fig. 4. The impulse responses of the 16 filters hsr (n) that deconvolve the matrix (n) shown in Fig. 3. The “matrix form” illustrates the position of each of the optimal filters hst (n) in m;I (n). Note how the combined effect of the modeling delay and the regularization has limited the main part of the energy of each hrs (n) to the center of the filter. H of the optimal filters, and if is too large, the deconvolution will not be very accurate. Fortunately, though, the exact value of is usually not critical. For example, if the optimal value of in a given situation is 0 , then values in the range between 0:80 and 1:20 will usually work just as well, and values in the range between 0:20 and 50 are likely to produce acceptable results. Ultimately, a subjective judgement is necessary in order to determine whether the value of is acceptable. IV. FAST DECONVOLUTION USING REGULARIZATION As demonstrated in the previous section, it is not difficult to derive an expression for the inverse z -transforms of the optimal filters under the constraint that they be stable. In practice, the filters also have to be causal and, in addition, our method also requires them to have finite duration. In this section, we show how to calculate a matrix of optimal causal finite impulse response (FIR) filters, each containing Nh coefficients. Since this method uses fast Fourier transforms (FFT’s), Nh must be equal to a power of two. A. The Principle of the Method It is a well-known fact that deconvolution based on matching the frequency response only at a number of discrete frequencies usually leads to an undesirable circular convolution effect, sometimes referred to as wrap-around effect, in the time domain [17, chap. 3]. When convolving two sequences by multiplying their FFT’s, circular convolution effects can be avoided by using zero-padding. However, when one attempts to deconvolve one sequence out of another by dividing their FFT’s, zero-padding does not prevent circular convolution effects from affecting the outcome. The problem is that the optimal frequency response of the optimal filter is inevitably that of a filter whose impulse response is of infinite duration, and so the zero-padded sequence would have to be infinitely long to avoid circular convolution completely. The basic idea behind our method is to use regularization to reduce the effective duration of the optimal filter to approximately Nh =2. Since the response of the exact least squares inverse is matched only at Nh frequencies, Nh needs to be large enough to ensure that important detail is not missed out by the sampling in the frequency domain. As an initial estimate of Nh , one can try a value of 4SNc . B. The Fast Deconvolution Algorithm The implementation of the inversion method is straightforward in practice. FFT’s are used to get in and out of the frequency domain, and the system is inverted for each frequency in turn. A “cyclic shift” of the inverse FFT’s of the optimal frequency responses is used to implement a modeling delay (this has been demonstrated previously by Hamada [23]). Equation (11) gives an expression for the response of 0;A as a continuous function of frequency. If an FFT is used to sample the frequency response of 0;A at Nh points, then the value of 0;A (k) at those frequencies is given by H H H H0 A(k) = [CH (k)C(k) + I]01CH(k)A(k) (14) ; where k denotes the kth frequency index; that is, the frequency corresponding to the complex number exp(j 2k=Nh ). In order to calculate the impulse responses of a matrix of causal filters m;A (n) for a given value of , the following steps are necessary. h IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 w n 193 Cn H n Fig. 5. The impulse responses rt ( ) of the 16 filters that are the result of the “matrix convolution” of ( ) with m;I ( ). The cross-talk is represented by the off-diagonal elements that are ideally zero. Note that the peaks along the diagonals occur at sample number 512, the value of the modeling delay . C 1) Calculate (k) by taking R 2 S Nh -point FFT’s of the plant impulse responses crs (n). 2) For each of the Nh values of k, calculate the S 2 T matrix 0;A (k ) from (14). 3) Calculate 0;A (n) by taking S 2 T Nh -point inverse FFT’s of the elements of 0;A (k). 4) Implement the modeling delay by a cyclic shift of m of each element of 0;A (n). For example, if the inverse FFT of H11 (k) is f3; 2; 1; 0; 0; 0; 0; 1g, then after a cyclic shift of three to the right h11 (n) is f0; 0; 1; 3; 2; 1; 0; 0g. The exact value of m is not critical; a value of Nh =2 is likely to work well in all but a few cases. H h H h C. A Multichannel Example This section shows the result of a deconvolution of a 4 2 4 matrix of head related transfer functions (HRTF’s) based on the geometry shown in Fig. 2. The four loudspeakers are positioned at equal distances from the origin of the coordinate system at the angles 30 ; 030 ; 110 , and 0110 (the coordinate system chosen is consistent with that employed by Blauert [24]). The four microphones are “positioned” in the ears of a KEMAR dummy head which is rotated by plus 5 and by 05 relative to facing straight ahead. This setup was used for implementing a virtual source imaging system [21]. The HRTF’s are taken from the MIT Media Laboratory’s data base, which has been made available for researchers over the Internet (World Wide Web address: http://sound.media.mit.edu/kdm/hrtf.html). Each HRTF is the result of a measurement in an anechoic chamber at a sampling frequency of 44.1 kHz. We use the “compact” version of the data base; each HRTF has been equalized for the loudspeaker response before being truncated to retain only 128 coefficients. In addition, m each HRTF has also been scaled so that their values lie within the range from 01 to +1. Fig. 3 shows, in “matrix-form,” the impulse responses of the 16 HRTF’s that are the elements of (n) as derived from the geometry shown in Fig. 2. This system can be efficiently inverted by a generalized cross-talk cancellation matrix m;I (n) whose 16 elements each contains 1024 coefficients. The impulse responses of the 16 elements of m;I (n) are shown in Fig. 4. These filters were calculated in less than 15 s on a 486-PC using a modeling delay of 512 samples and a regularization parameter of 0.0001 (without regularization, the deconvolution does not work at all). The 16 impulse responses wrt (n) resulting from “convolving” (n) with m;I (n) (or, more precisely, multiplying (z ) with (z )) are shown in Fig. 5, and their frequency responses Wrt (f ) are shown in Fig. 6. Clearly, the deconvolution is very accurate. Diagonal elements of (f ) have got almost perfectly flat frequency responses, and the “cross-talk,” as represented by the off-diagonal elements of (f ), is attenuated by more than 30 dB over almost the entire audio frequency range. C H H C H C H W W V. CONCLUSION An FFT-based deconvolution method can be used to deconvolve both single-channel and multichannel systems with a matrix of causal FIR filters. The method is extremely fast, and easy to implement. However, the method works well only when it is possible to use relatively long optimal filters, and so it should be used only when hardware restrictions are not too severe. It is suitable for both hardware and computer implemention since it uses only numerically fast operations such as FFT’s, convolutions, and inversion and multiplication of well-conditioned matrices of low order. The method is based on the analysis of a matrix of exact least squares optimal filters. Even though these filters are generally not 194 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 Fig. 6. The frequency responses of the 16 filters shown in Fig. 5. The unit of the x-axis is kHz, and the unit of the y -axis is dB. The diagonal elements are ideally 0 dB, the off-diagonal elements are ideally dB. 01 realizable in practice, their properties indicate that it is possible to design a matrix of causal FIR optimal filters whose performance is optimized in the frequency domain at a large number of discrete frequencies. The well-known, and in this case undesirable, circular convolution effect in the time domain, which is associated with filter design based on frequency sampling techniques, is controlled by using regularization. In practice, the regularization works by ensuring that the optimal filters decay away quickly enough to ensure that the circular convolution effect is insignificant. In order to achieve an accurate inversion, the regularization parameter must be set to an appropriate value, but fortunately the exact value of is usually not critical. [10] REFERENCES [16] [1] B. Widrow and S. D. Stearns, Adaptive Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1985. [2] J. H. Justice, N. L. Owsley, J. L. Yen, and A. C. Kak, Array Signal Processing, S. Haykin, Ed. Englewood Cliffs, NJ: Prentice-Hall, 1985. [3] B. S. Atal, M. Hill, and M. R. Schroeder, “Apparant sound source translator,” U.S. Patent no. 3 236 949, Feb. 22, 1966. [4] P. Damaske, “Head-related two-channel stereophony with loudspeaker reproduction,” J. Acoust. Soc. Amer., vol. 50, pp. 1109–1115, 1971. [5] M. R. Schroeder, “Models of hearing,” Proc. IEEE, vol. 63, pp. 1332–1352, 1975. [6] P. A. Nelson, H. Hamada, and S. J. Elliott, “Adaptive inverse filters for stereophonic sound reproduction,” IEEE Trans. Signal Processing, vol. 40, pp. 1621–1632, 1992. [7] D. Griesinger, “Equalization and spatial equalization of dummy-head rocordings for loudspeaker reproduction,” J. Audio Eng. Soc., vol. 37, pp. 20–29, 1989. [8] D. H. Cooper and J. L. Bauck, “Prospects for transaural recording,” J. Audio Eng. Soc., vol. 37, pp. 3–19, 1989. [9] J. Bauck and D. H. Cooper, “Generalized transaural stereo and applications,” J. Audio Eng. Soc., vol. 44, pp. 683–705, 1996. [17] [11] [12] [13] [14] [15] [18] [19] [20] [21] [22] [23] [24] M. Miyoshi and Y. Kaneda, “Inverse filtering of room acoustics,” IEEE Trans. Acoust., Speech, Signal Processing, vol. 36, pp. 145–152, 1988. O. Kirkeby, P. A. Nelson, F. Orduna-Bustamante, and H. Hamada, “Local sound field reproduction using digital signal processing,” J. Acoust. Soc. Amer., vol. 100, pp. 1584–1593, 1996. A. L. Van Buren, “Theoretical design of nearfield calibration arrays,” J. Acoust. Soc. Amer., vol. 50, pp. 192–199, 1973. O. Kirkeby and P. A. Nelson, “Reproduction of plane wave sound fields,” J. Acoust. Soc. Amer., vol. 94, pp. 2992–3000, 1993. W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery, Numerical Recipes in C, 2nd ed. Cambridge, U.K.: Cambridge Univ. Press, 1992. J. H. Wilkinson, The Algebraic Eigenvalue Problem. Oxford, U.K.: Oxford Univ. Press, 1965. P. Kraniauskas, Transforms in Signals and Systems. Reading, MA: Addison-Wesley, 1992. A. V. Oppenheim and R. W. Schafer, Digital Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1975. E. Kreyszig, Advanced Engineering Mathematics. New York: Wiley, 1983. S. J. Elliott, C. C. Boucher, and P. A. Nelson, “The behavior of a multiple channel active control system,” IEEE Trans. Signal Processing, vol. 40, pp. 1041–1052, 1992. P. A. Nelson, “Active control of acoustic fields and the reproduction of sound,” J. Sound Vib., vol. 177, pp. 447–477, 1994. F. Orduna-Bustamante, “Digital signal processing for multi-channel sound reproduction,” Ph.D. dissertation, Southampton Univ., U.K., 1995. O. Kirkeby, P. A. Nelson, H. Hamada, and F. Orduna-Bustamante, “Fast deconvolution of multi-channel systems using regularization,” ISVR Tech. Rep. 255, Univ. Southampton, U.K., 1996. H. Hamada, “Construction of orthostereophonic system for the purposes of quasiinsitu recording and reproduction,” J. Acoust. Soc. Jpn., vol. 39, pp. 337–348, 1983. J. Blauert, Spatial Hearing, Amer. ed., trans. J. S. Allen. Cambridge, MA: MIT Press, 1983. IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 6, NO. 2, MARCH 1998 Correction to “A Frequency-Warping Approach to Speaker Normalization” Due to an editorial error in the above paper,1 the biography of Richard C. Rose was incorrect. Dr. Rose’s picture and his name were printed in the paper with the biography of Dr. Kenneth Rose. The correct photograph and biography for Richard C. Rose follow. We would like to apologize to Richard Rose for this serious mistake. We would also like to apologize to both authors of the above paper for having detracted from the quality of their paper. Finally, we would like to apologize to Dr. Kenneth Rose for having mistakenly associated his biography with another individual. 195 Richard C. Rose received the B.S. and M.S. degrees in electrical engineering from the University of Illinois, Urbana, in 1979 and 1981, respectively. He received the Ph.D. degree in electrical engineering from the Georgia Institute of Technology, Atlanta, in 1988, completing his dissertation work in speech coding and analysis. From 1980 to 1984, he was with Bell Laboratories, where he worked on signal processing and digital switching systems. From 1988 to 1992, he was a member of the Speech Systems and Technology Group, MIT Lincoln Laboratory, Lexington, MA, working on speech recognition and speaker recognition. He is currently a Principal Member of Technical Staff, Speech and Image Processing Services Laboratory, AT&T Laboratories–Research, Florham Park, NJ. Dr. Rose served as a member of the IEEE SP Technical Committee on Digital Signal Processing from 1990 to 1995, and has served as an adjunct faculty member with the Georgia Institute of Technology. He has been elected as an at-large member of the Board of Governors for the Signal Processing Society, serves as an Associate Editor for the IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, and serves as a member of the IEEE SP Technical Committee on Speech. He is also a member of Tau Beta Pi, Eta Kappa Nu, and Phi Kappa Phi. Manuscript received January 12, 1997. Publisher Item Identifier S 1063-6676(98)02406-7. 1 L. Lee and R. C. Rose, IEEE Trans. Speech Audio Processing, vol. 6, pp. 49–60, January 1998. 1063–6676/98$10.00 1998 IEEE