A Fast Delivery Protocol for Total Order Broadcasting
advertisement

A Fast Delivery Protocol for Total Order
Broadcasting
Li Ou , Xubin He , Christian Engelmann , and Stephen L. Scott
Department of Electrical and Computer Engineering
Tennessee Technological University, Cookeville, TN 38505, USA
Email: lou21, hexb @tntech.edu
Computer Science and Mathematics Division
Oak Ridge National Laboratory, Oak Ridge, TN 37831, USA
Email:
engelmannc,scottsl @ornl.gov
Department of Computer Science
The University of Reading, Reading, RG6 6AH, UK
Abstract—Sequencer, privilege-based, and communication history algorithms are popular approaches to implement total
ordering, where communication history algorithms are most
suitable for parallel computing systems, because they provide
best performance under heavy work load. Unfortunately, posttransmission delay of communication history algorithms is most
apparent when a system is idle. In this paper, we propose a
fast delivery protocol to reduce the latency of message ordering.
The protocol optimizes the total ordering process by waiting for
messages only from a subset of the machines in the group, and by
fast acknowledging messages on behalf of other machines. Our
test results indicate that the fast delivery protocol is suitable for
both idle and heavy load systems, while reducing the latency of
message ordering.
I. I NTRODUCTION
Total order broadcasting is essential for group communication services [1]–[3], but the agreement on a total order
usually bears a cost of performance: a message is not delivered
immediately after being received, until all the communication
machines reach agreement on a single total order of delivery.
Generally, the cost is measured as latency of totally ordered
messages, from the point the message is ready to be sent, to
the time it is delivered by the sender machine.
Traditionally three approaches are widely used to implement
total ordering: sequencer, privilege-based, and communication
history algorithms [3]. In sequencer algorithms, one machine
is responsible for ordering the messages on behalf of other
machines in the group. Privilege-based algorithms rely on the
idea that senders can broadcast messages only when they are
granted the privilege to do so. For example, in a token-based
algorithm [4], a token is rotated among machines in the same
group, and one machine can only send messages while it holds
the token. In communication history algorithms, total order
This research was partially sponsored by the Office of Advanced Scientific
Computing Research of the U.S. Department of Energy. The work was
performed in part at the Oak Ridge National Laboratory, which is managed
by UT-Battelle, LLC under Contract No. De-AC05-00OR22725. The work
performed at Tennessee Tech University was partially supported by the U.S.
National Science Foundation under under Grant Nos CNS-0617528 and SCI0453438. This work was also partially sponsored by the Laboratory Directed
Research and Development Program of Oak Ridge National Laboratory.
messages can be sent by any machine at any time, without
prior enforced order, and total order is ensured by delaying
the delivery of messages, until enough information of communication history has been gathered from other machines.
Three types of algorithms have both advantages and disadvantages. Sequencer algorithms and privilege-based algorithms
provide good performance when a system is relatively idle.
However, when multiple machines are active and constantly
send messages, the latency is limited by the time to circulate
the token or produce the order number from the sequencer.
Communication history algorithms have a post-transmission
delay [3], [5]. To collect enough information, the algorithm
has to wait for a message from each machine in the group,
and then deliver the set of messages that do not causally
follow any other, in a predefined order, for example, by sender
ID. The length of the delay is set by the slowest machine
to respond with a message. The post-transmission delay is
most apparent when the system is relatively idle, and when
waiting for response from all other machines in the group.
In the worst case, the delay may be equal to the interval of
heart beat messages from an idle machine. On the contrary,
if all machines produce messages and the communication in
the group is heavy, the regular messages continuously form a
total order, and the algorithm provides the potential for low
latency of total order message delivery.
In a parallel computing system, multiple concurrent requests
are expected to arrive simultaneously. A communication history algorithm is preferred to order requests among multiple
machines, since such algorithm performs well under heavy
communication loads with concurrent requests. However, for
relatively light load scenarios, the post-transmission delay is
high. We propose a fast delivery protocol to reduce this posttransmission delay. The fast delivery protocol forms the total
order by waiting for messages only from a subset of the
machines in the group, and by fast acknowledging a message if
necessary, thus it fast delivers total order messages. To verify
our protocol, we implemented a prototype in the Transis [5]
group communication system and applied this protocol to an
active/active replication scenario.
Let and are two total order broadcasting
messages:
1) if causally precedes , all machines that
deliver and deliver before .
2) if and are concurrent, if machine delivers before , then any machine that
belongs to the same partition with delivers before .
Fig. 1.
The definition of total order broadcasting service.
II. T OTAL O RDER B ROADCASTING S ERVICE
In this section, we briefly discuss the services a total order
broadcasting system should provide. We assume that there is
a substrate layer providing basic broadcasting services.
A. Basic Broadcasting Services
The machines in the system use a broadcasting service to
send messages. A broadcast message is sent once by it’s source
machine, and arrives to all destined machines in the system, at
different time. The broadcasting service is responsible for the
reliable delivery of messages. Internally, the causal delivery
order [6] of messages is guaranteed by the service.
(Definition): Message and message are concurrent,
if does not causally precedes , and does not causally
precedes .
The basic broadcasting service receives the messages of the
network. It keeps causal order of messages and delivers them
to our fast delivery protocol. The broadcasting service does not
guarantee the same delivery sequence of concurrent messages
on all machines in the system.
B. Total Order Broadcasting
On top of the basic broadcasting service, totally ordered
broadcasting extends the underlying causal order to a total
order for concurrent messages.
(Total Order): If two correct machines and both deliver
message and , then delivers before if and only
if delivers before .
The total order broadcasting provided by the system does
not guarantee the total order across multiple partitions. As long
as partitions do not occur, all machines deliver the messages
in the same total order. When a partition occurs, machines in
every partition continue to form the same total order. However,
this total order may differ across partitions. The total order
broadcasting service of the system is defined in Fig. 1.
III. FAST D ELIVERY P ROTOCOL FOR T OTAL O RDER
B ROADCASTING
In this section, we describe a fast delivery protocol to
provide the total order broadcasting service defined in Section II-B. We assume that the protocol works on top of the
basic broadcasting services described in Section II-A. We
first consider a static system of machines, which means
no failure of machines, no network partitions and re-merges,
no new machines. Those features will be considered in the
Section IV, in which we show how to extend the protocol to
handle dynamic environments.
Each machine will not deliver any messages until it collects
a message set from other machines in the group. The message
set should contain enough information to guarantee the totally
ordered delivery. After receives enough messages, the machine
delivers the set of messages that do not causally follow
any other, in a predefined order. Idle machines periodically
broadcast heart beat messages with a predefined interval on
behalf of other machines. Those heart beat messages will not
be delivered, but used by machines to determine the order of
received messages.
A. Notation and Definition
We define that a partition consists of a group of machines
. We assume each machine in the group has
a distinct ID. For a machine , function "!#$% returns its ID.
If the number of machines in the primary group is & ,
'
(*)+,-!#$.%/-!#%0)1324657/&89
"!#$%;< : "!=#>%
We associate with each machine ) the functions @?BABC-D
and EFCC-D which are defined:
'
1) =?GABC-DH#I% < 7J )+-!#%0KL"!#$%/
'
2) EFCCMDN#$.% < 7J *)+"!=#>%+OP"!#$%/
The input to the fast delivery protocol is a stream of
causally ordered messages from underlying the broadcasting
service. We denote by QSR the ith message sent by machine .
EAT!9A?U#VQSR -% < . If message QSR is delivered before WR in machine , !3AGXV-YZA?U#QSR -%[K\!3AGXV-YZA?U#WR %
We define a pending message [7] to be a message that was
received by the protocol but has not be agreed to total order,
thus, not delivered for processing. A pending message that
follows only delivered messages is called a candidate message. The set of concurrent candidate messages is called the
candidate set. This is the set of messages that are considered
for the next slot in the total order. For example, a system
has 5 machines, 6 > =]4=^4_B . After a certain time, there
is no undelivered messages on any machines. Machine broadcasts a message `U2 , and machine ^ broadcasts a
message `Ga . All five machines receive both `U2 and `a ,
but none of them can deliver the two messages, because
except the sending machines, no one knows if messages b`45
and `c are sent by and ] , concurrently with `Ba , or
not. All machines should not deliver `U2 and `Ba , until
enough information is collected to determine a total order. The
message set of `U2 and `Ga is called the candidate set, and
messages ` 2 and ` a are called candidate messages. Let
d
< `
W be the set of candidate messages in
d
a machine . We associate with ` a function EAT!3A?E .
EAT!9A?E3#
d
d
<
` %
GEAT!9A?U#V
'
%J )
d
` Let !B` is the set of messages ready to be delivered in a
d
d
d
machine . !`fe
` . The
!` is called the deliver set.
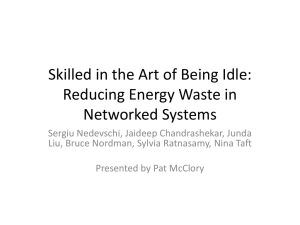
When receiving a regular message in machine :
1) if ( is a new candidate message)
d
add into candidate set `
d
2) if ( `<h
: g )
d
for all (bi)
` )
d
if @?BABC-DH#MEAT!3A?Z#b-%j%[ekEAT!9A?E3# `4%
d
add into delivery set !`
d
3) if ( !B`<l
: g )
d
deliver all messages in !B` in the
order of -!#>EAT!3A?U#
G%j%
4) if ( EAT!3A?Z#%m)
: EF.CC-DN#$% )
return
if (message is not a total order message)
return
if (messages are waiting to be broadcast from )
return d
if ( nZi)
`Z-!#>EAT!3A?U#bM%j% < )
return
otherwise, fast acknowledge Fig. 2.
The fast delivery protocol.
B. The Fast Delivery Protocol
The fast delivery protocol is symmetric, and we describe it
for a specific machine (the pseudo code is shown in Fig. 2).
The key idea of the fast delivery protocol is that it forms the
total order by waiting for messages only from a subset of the
machines in the group. Assuming a candidate message is in
d
candidate set ` , we use the following delivery criterion to
define what messages a machine has to wait before delivering
:
d
1) Add into deliver set !` when:
2) Deliver
order:
=?GABC-DH#MEAT!3A?U#V%j%+eoEAT!3A?BE3#
d
the messages in the
!4` with
'
d
`%
the following
EAT!3A?U#V%[)EFCC-DH#%
In the same example, if and ] are idle, they should
fast acknowledge ` a , because =^
)PEFCCMDN#$ % , and =^
)
EF.CC-DN#$=]% . If _ is idle, it does not need to send fast
: EFCCMDN#$_% .
acknowledgment because ^v)
fast acknowledgment reduces the latency of message
delivery, however, it injects more packets into network. If
communication is heavy, fast acknowledgment may burden
network and machines, thus increase delivery latency. To
reduce the cost of fast acknowledgment, we define the
following acknowledgment criterion:
(ACK) Fast acknowledge a message from a machine when:
1) Message is a total order message.
2) There is no message waiting to be sent from the machine
.
d
< 3) : nZ )
.
` j"!#>EAT!9A?U#V %j%
It is very straightforward of conditions 1. Condition 2 means
if a machine is sending regular messages, it is not a idle
machine, and the regular messages themselves are enough to
form a total order. Condition 3 means if a machine already
d
sent a regular message which is still in the ` , that message
can be used to form a total order, without an additional
acknowledgment. In the same example, if T is idle after sent
`Z2 , it does not need to send any acknowledgment (although
d
` .
^ )EF.CC-DN#$.w% ), because `Z2 is still in
In a parallel system, when multiple concurrent requests
arrive a machine simultaneously and the system is busy, conditions 2 and 3 are very unlikely to be satisfied simultaneously,
so almost no additional acknowledgments are injected into the
network when communication is heavy.
IV. FAST D ELIVERY P ROTOCOL
j
)
d
! ` "!=#MEAT!3A?Z#b-%j%[K\"!=#MEAT!3A?U#V
%j%
p=q
!3AX-Y3A?U#VM%[Ko!3AX-Y3A?U#V
%
With the same example in Section III-A, we explain how the
protocol works. All five machines could deliver b`U2 immedid
ately, because =?BAGC-DN#$(2G% <rg , and EAT!3A?E3# `% <sg . The
five machines could not deliver `a , because =?BAGC-DN#$@aZ% <
d
.BB ] , and EAT!3A?E3#
`4% < . . Machines have to wait
messages from both and ^ , but do not need to wait a
message from _ , because _ )t
: @?BABC-DH#I@a3% .
According
to
the
protocol,
if =?GABC-DH#MEAT!3A?U#V%j%ue :
d
EAT!3A?BE3#
` % . the machine has to wait messages from other
machines before delivering . If any of those machines is idle,
the waiting time could be the interval of heart beat messages.
To speedup the delivery of , the idle machines should
immediately acknowledge on behalf of other machines. If
a machine receives a message , and is idle, broadcasts
a fast acknowledgment when:
FOR
DYNAMIC S YSTEMS
The fast delivery protocol operates on an asynchronous
stream of causal order messages. In this section, we show
how to extend the protocol to handle failures, the network
partitioning and re-merge, and joining machines.
Fast delivery protocol is integrated into the group communication service to provide total order delivery of messages
on top of the basic broadcasting service. We assume that
the system contains membership service, which maintains a
view of current membership set (CMS) consistent among all
machines in the dynamic environment. When machines crash
or disconnect, the network partitions and re-merges, or the
new machines join, the membership service of all connected
machines must reconfigure and reach a new agreement of
CMS.
After a new agreement is reached, membership service delivers a view change event indicating a new configuration. All
connected machines in the new configuration agree on the set
of regular messages that belong to the previous membership,
and must be delivered before the new view change event. Fast
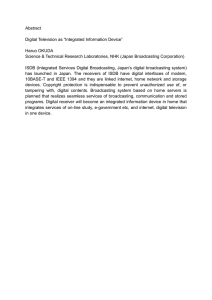
# of machines
1
2
3
4
5
6
7
8
Single
235
952
1031
1089
1158
1213
1290
1348
All
971
1461
1845
2236
2646
3073
3514
TABLE I
R EQUEST LATENCY ( x3y ) COMPARISON OF MULTIPLE MACHINES .
”S INGLE ” MEANS ONLY ONE MACHINE IN A RELATIVELY IDLE SYSTEM
BROADCASTS REQUESTS . ”A LL ” MEANS ALL MACHINES IN A BUSY
SYSTEM BROADCAST REQUESTS .
delivery protocol is extended to define how to deliver such
messages in the dynamic environment.
We assume that after a new agreement of CMS, the membership service notifies fast delivery protocol with a special
event. With such event, the protocol gets the machine set, {z ,
which belongs to previous configuration, but is included in
the new configuration. The new =?GABC-DH#I% and EFCC-DH#I%
are calculated based on the |z :
1) @?BABC-DH#$.%~}9" < @?BABC-DH#$.%jj p iz
2) EF.CC-DH#I%~TA
< EFCC-DH#I%~ p iz
Using the algorithm described in Section III, the set of
regular messages that belong to the previous configuration
are delivered before the view change event with the new
@?BABCMDN#$.% and EF.CC-DH#I% . Since a new CMS always completes within a finite delay of time, any total order message
could be delivered within a limited time interval.
V. E XPERIMENTAL R ESULTS
To verify above model, a proof-of-concept prototype for
fast delivery protocol has been implemented in Transis [5],
and deployed on the XTORC cluster at Oak Ridge National
Laboratory, using up to 8 machines in various combinations
for functional and performance testing. The computing nodes
of the XTORC cluster are IBM IntelliStation M Pro series
servers. Individual nodes contain a Intel Pentium 2GHz processor with 768MB memory, and a 40GB hard disk. All
nodes are connected via Fast Ethernet (100MBit/s full duplex)
switches. Fedora Core 5 has been installed as the operating
system. Transis v1.03 with fast delivery protocol is used to
provide group communication services. Failures are simulated
by unplugging network cables and by forcibly shutting down
individual processes.
An MPI-based benchmark is used to send concurrent requests from multiple machines. The latency is measured with
blocked requests, and an average latency is calculated from
100 requests of each machine. The results under various
configurations are provided for comparison from 1 to 8 machines (Table I). In the configuration of only one machine, the
latency overhead mainly comes from processing cost of the
group communication service. When the number of machines
increases, additional overhead is introduced by the network
communication and total order communication algorithm to
reach agreement among machines. For each configuration, we
measure the latency under both idle and busy systems. In an
idle system, only a single machine is active to send requests.
In a busy system, all machines send concurrent requests,
and the communication traffic is heavy. The proof-of-concept
prototype showed that although the latency increases with the
number of machines, the fast delivery protocol works well to
keep the overall overhead acceptable for any HPC system. The
overhead is consistent for both idle and busy systems. The
fast acknowledgment aggressively acknowledges total order
messages to reduce the latency of idle systems when only
a single machine is active. The protocol is smart enough to
hold its acknowledgments when the network communication
is heavy because more machines are involved.
We compared the fast delivery protocol with the traditional
communication history algorithm provided by the original
Transis system. In idle system, the post-transmission delay
of traditional communication history algorithm is apparent. It
is not a constant value, and in worst case, the latency is equal
to the interval of heart beat messages from a idle machine.
A typical interval is in the gratitude of hundred milliseconds,
which is unacceptable, compared to the latency of fast delivery
protocol. In a busy system, the latency of fast delivery protocol
is almost the same as the traditional communication history
algorithm, because the protocol holds unnecessary acknowledgments. We found that when all machines sent concurrent
requests, the fast delivery protocol did not acknowledge any
broadcast, and the regular messages continuously form a total
order.
VI. R ELATED W ORK
Group communication systems typically provide different
group broadcast services with a variety of ordering and reliability guarantees [1]. A totally ordered service extends the
causal service by ensuring that messages sent to a set of
processes are delivered by all these processes in the same
order. Past research on total ordering algorithms focuses on
three popular approaches [3]. Sequencer algorithms [8]–[10]
rely on one machine to order the messages on behalf of
other machines in the group. Privilege-based algorithms [4],
[11] force the total order in the process of competition of a
privilege among all machines in the group. Communication
history algorithms [5], [7], [12]–[14] ensure the total order by
delaying the delivery of messages, until the enough information of communication history has been gathered from other
machines. The agreement on a total order in communication
history algorithms usually bears a cost of performance: posttransmission delay [3], [5]. Several studies have been made to
reduce the cost. Early delivery algorithms [7], [13] reduce the
latency by reaching agreement with a subset of the machines
in the group. Optimal delivery algorithms [15], [16] deliver
messages before the total order is determined, but notify
the applications and cancel the delivery if the final order is
different with delivered order.
Researchers have considered using totally ordered broadcasting to provide high availability for HPC systems [17].
Past research in high availability primarily focused on the
active/standby model [18]–[21]. Recent research of symmetric
active/active replication model [22], [23] uses multiple redundant service nodes running in virtual synchrony [24] and
totally ordered broadcasting.
VII. C ONCLUSION
In this paper, we propose a fast delivery protocol to reduce
the latency of message ordering in group communication.
The protocol optimizes the total ordering process by waiting
for messages only from a subset of the machines in the
group. The protocol performances well for both idle and busy
systems. Furthermore, the fast acknowledgment aggressively
acknowledges total order messages to reduce the latency when
some machines are idle. The protocol is smart enough to
hold the acknowledgments when the network communication
is heavy.
We implemented a prototype of the fast delivery protocol
and discussed an application of this protocol in symmetric
active/active replication in parallel computing systems. Our
performance results are encouraging: they indicate that the fast
delivery protocol is suitable for both idle and heavy loaded
systems.
R EFERENCES
[1] G. V. Chockler, I. Keidar, and R. Vitenberg, “Group communication
specifications: A comprehensive study,” ACM Computing Surveys, 2001.
[2] R. Baldoni, S. Cimmino, and C. Marchetti, “Total order communications: A practical analysis,” Lecture Notes in Computer Science:
Dependable Computing, vol. 3463, pp. 38–54, 2005.
[3] X. Defago, A. Schiper, and Peter Urban, “Total order broadcast and
multicast algorithms: Taxonomy and survey,” ACM Computing Surveys,
December 2004.
[4] Y. Amir, L. E. Moser, P. M. Melliar-Smith, D. A. Agarwal, and
P. Ciarfella, “The Totem single-ring ordering and membership protocol,”
ACM Trans. Comput. Syst., November 1995.
[5] D. Dolev and D. Malki, “The transis approach to high availability cluster
communication,” Communications of the ACM, 1996.
[6] L. Lamport, “Time, clocks, and the ordering of events in a distributed
system,” Comm. ACM, July 1978.
[7] D. Dolev, S. Kramer, and D. Malki, “Early delivery totally ordered
multicast in asynchronous environments,” Symposium on Fault-Tolerant
Computing, 1993.
[8] K. P. Birman and R. van Renesse, “Reliable distributed computing with
the ISIS toolkit,” IEEE Computer Society Press, 1993.
[9] M. F. Kaashoek and A. S. Tanenbum, “An evaluation of the Amoeba
group communication system,” Proc. 16th Intl. Conf. on Distributed
Computing Systems, 1996.
[10] M. K. Reiter, “Distributing trust with the Rampart toolkit,” Communications of the ACM. 39, vol. 39, no. 4, April 1996.
[11] F. Cristian, S. Mishra, and G. Alvarez, “High-performance asynchronous
atomic broadcast,” Distributed System Engineering Journal 4, 2, June
1997.
[12] M. K. Aguilera and R. E. Strom, “Efficient atomic broadcast using
deterministic merge,” Proc. 19th Annual ACM Intl. Symp. on Principles
of Distributed Computing, 2000.
[13] Z. Bar-Joseph, I. Keidar, and N. Lynch, “Early-delivery dynamic atomic
broadcast,” Proc. 16th Intl. Symp. on Distributed Computing, 2002.
[14] D. Dolev and I. Keidar, “Totally ordered broadcast in the face of network
partition,” Dependable Network Computing, Chapter 3.
[15] B. Kemme, F. Pedone, G. Alonso, A. Schiper, and M. Wiesmann, “Using
optimistic atomic broadcast in transaction processing systems,” IEEE
Trans. Knowl. Data Eng., July 2003.
[16] P. Vicente and L. Rodrigues, “An indulgent uniform total order algorithm
with optimistic delivery,” Proc. 21st IEEE Intl. Symp. on Reliable
Distributed Systems, 2002.
[17] C. Engelmann and S. Scott, “Concepts for high availability in scientific
high-end computing,” in Proc. of HAPCW, 2005.
[18] “PBSPro job management system for the cray XT3 at Altair Engineering, Inc,” http://www.altair.com/pdf/PBSPro Cray.pdf.
[19] “SLURM at lawrence livermore national laboratory, Livermore, CA,
USA,” http://www.llnl.gov/linux/slurm.
[20] C. Engelmann, S. L. Scott, D. E. Bernholdt, N. R. Gottumukkala,
C. Leangsuksun, J. Varma, C. Wang, F. Mueller, A. G. Shet, and
P. Sadayappan, “MOLAR: Adaptive runtime support for high-end
computing operating and runtime systems,” ACM SIGOPS Operating
Systems Review, 2006.
[21] I. Haddad, C. Leangsuksun, and S. L. Scott, “HA-OSCAR: Towards
highly available linux clusters,” Linux World Magazine, March 2004.
[22] C. Engelmann, S. L. Scott, C. Leangsuksun, and X. He, “Active/active
replication for highly available HPC system services,” Proceedings of
the International Symposium on Frontiers in Availability, Reliability and
Security (FARES),Vienna, Austria, April 2006.
[23] K. Uhlemann, C. Engelmann, and S. L. Scott, “JOSHUA: Symmetric
active/active replication for highly available HPC job and resource
management,” in Proceedings of IEEE International Conference on
Cluster Computing, September 2006.
[24] L. Moser, Y. Amir, P. Melliar-Smith, and D. Agarwal, “Extended virtual
synchrony,” Proc. of DCS, 1994.