Dynamic Behavior of First-order and Second
advertisement

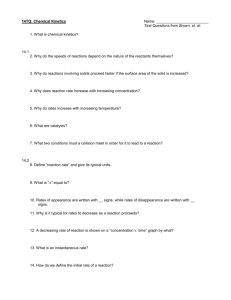
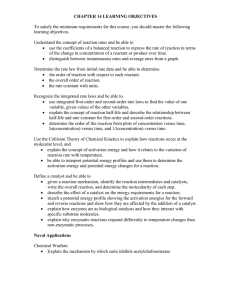
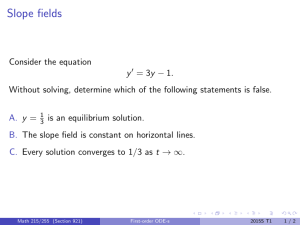
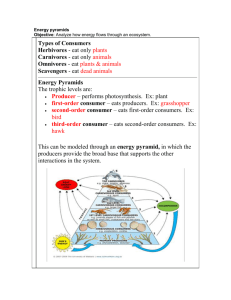
Dynamic Behavior of First-order and Second-order Systems 1. Analysis of first-order systems Consider the system shown in Figure 1 which consists of a tank of uniform cross sectional area A to which is attached a flow resistance R. Assume that qo is related to the head by linear relationship h qo = (4. 1) R qi V h q A Figure 1 Liquid level system The change in liquid height inside the tank can be described by the following equation; dh h =q− dt R At steady state, this equation can be written as: h 0 = qs − s R Subtracting Equation (4.3) from Equation (4.2) gives d (h − hs ) (h − hs ) A = ( q − qs ) − dt R Defining the deviation variables as Q = q − qs A H = h − hs Equation (4.4) can be written as dH H A + =Q dt R Chapter 4: Dynamic Behavior of First-order & Second-Order Systems (4. 2) (4. 3) (4. 4) (4. 5) (4. 6) 1 Taking the L.T. of this equation gives H ( s) Q( s) = + AsH ( s ) (4. 7) R Equation (4.7) can be rearranged into the standard form of the first-order system to give H (s) R = Q( s ) τs + 1 (4. 8) where τ = AR In a general form, Equation (4.8) can be written in a general form: Y ( s) K = G ( s) = U ( s) τs + 1 Where Y ( s ) = l[ y (t )] (4. 9) (4. 10) U ( s ) = l[u (t )] G is called transfer function. It is a convenient way to represent linear dynamic models. It relates one input and one output: u(t) U(s) System y(t) Y(s) Figure 2 General system representation The term τ (time constant) and K (steady state gain) characterize the first-order system. Note that the both parameters depend on operating conditions of the process and that the transfer function does not contain the initial conditions explicitly. Properties of transfer functions Time constant of a process is a measure of the time necessary for the process to adjust to a change in the input. Steady state gain is the steady state change in output divided by the sustained change in the input. It characterizes the sensitivity of the output to the change in input. The steadystate of a transfer function can be used to calculate the steady-state change in an output due to a steady-state change in the input. For example, suppose we know two steady states for an input, u, and an output, y. Then we can calculate the steady-state gain, K, from: Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 2 K= y2, ss − y1, ss (4. 11) u2, ss − u1, ss Another important property of the transfer function is that the order of the denominator polynomial (in s) is the same as the order of the equivalent differential equation. A general nth-order differential equation has the form dny d n −1 y dy d mu d m −1u du an n + an −1 n −1 + L + a1 + ao y = bm m + bm −1 m −1 + L + b1 + bou (4. 12) dt dt dt dt dt dt Where u and y are input and output deviation variables respectively. The transfer function obtained by L.T. is m Y ( s) G(s) = = U ( s) ∑b s i ∑a s i i i =0 n i i =0 = bm s m + bm −1s m −1 + L + bo an s n + an −1s n −1 + L + ao (4. 13) The steady state gain of G(s) in Equation (4.13) is bo/ao, obtained by setting s = 0 in G(s). Definition: The order of the transfer function is defined to be the order of the denominator polynomial Multiplicative rule U G1 Y G2 Y = G1 ⋅ G 2 ⋅ U (4. 14) Additive rule U1 G1 + U2 + G2 Y = G1U1 + G2U 2 Chapter 4: Dynamic Behavior of First-order & Second-Order Systems (4. 15) 3 Dynamic response The dynamic response for a step change in u(t) of magnitude M: U(s) = M/s − t y (t ) = KM (1 − e τ ) (4. 16) The transient response for a step change is shown in Figure 3. M u(t) y(t) KM 0 t Figure 3 Response of a first-order system to a step change in the input. Dynamic Characteristics • A first-order process is self-regulating. The process reaches a new steady state. • The ultimate value of the output is K for a unit step change in the input, or KM for a step of size M. This can be seen from Equation (4.16), which yields y → KM as t → ∞ . This characteristic explains the name steady state or static gain given for the parameter K, since for any step change in the input the resulting change in the output steady state is given by Δ(output ) = KΔ(input ) (4. 17) This Equation tells us by how much we should change the value of the input in order to achieve a desired change in the output, for a process with given K. Thus, to effect the same change in the output, we need: A small change in the input if K is large (very sensitive systems) A large change in the input if K is small. See Figure 5. • The value of y(t) reaches 63.2 % of its ultimate value when the time elapsed is equal to one time constant τ. When the time elapsed is 2τ, 3τ, 4τ, the percent Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 4 response is 86.5, 95 and 98 respectively. From these facts, one can consider the response essentially completed in three to four time constants. • The slope of the response at t = 0 is equal to 1. d [ y (t ) / KM ] = (e −t τ ) t = 0 = 1 d (t τ ) t =0 (4. 18) This implies that if the initial rate of change of y(t) were to be maintained, the response would reach its final value in one time constant (see the dashed line in Figure 4). The corollary conclusions are: The smaller the value of time constant, the steeper the initial response of the system (Figure 5). 1.0 y KM 0.632 0 1 t 10 0.0 τ Figure 4 Response of a first-order system to a step change in the input. y(t) y(t) K1M K1 K2M K2 KM t1 K2 < K1 0 t2 Time 0 t1 < t2 Time Figure 5 Effect of static gain, time constant on the response of first-order lag system. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 5 2. Pure capacitive system (Integrator) Consider the first order system described by Equation (4.19) dy a1 + ao y = bu (t ) dt If ao = 0, then from Equation (4.19) we take dy b = u (t ) = Ku (t ) dt a1 Which gives a transfer function Y ( s) K G ( s) = = U ( s) s (4. 19) (4. 20) (4. 21) In this case, the process is called purely capacitive or pure integrator. Dynamic response For a step change in u of magnitude M: U(s) = M/s. Equation (4.21) yields KM G ( s) = 2 s After inversion we find that y (t ) = Kt (4. 22) (4. 23) Notice that the output grows linearly with time in unbounded fashion (Figure 6). Thus, y→∞ as t→∞ Note that a pure capacitive process causes serious control problem because it can not balance itself. For small change in the input, the output grows continuously. This attribute is known as non-self-regulating process. y(t) K t Figure 6 Unbounded response of pure capacitive process Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 6 3. Analysis of second-order systems A second-order system is one whose output, y(t), is described by a second-order differential equation. For example, the following equation describes a second-order linear system: d2y dy + a1 + ao y = bu (t ) 2 dt dt If ao ≠ 0, then Equation (4.24) yields a2 (4. 24) d2y dy + 2ξτ + y = Ku (t ) (4. 25) 2 dt dt Equation (4.25) is in the standard form of a second-order system, where τ = natural period of oscillation of the system ζ = damping factor K = steady state gain The very large majority of the second- or higher-order systems encountered in a chemical plant come from multicapacity processes, i.e. processes that consist of two or more first-order systems in series, or the effect of process control systems. Laplace transformation of Equation (4.25) yields K (4. 26) G ( s) = 2 2 τ s + 2ξτs + 1 τ2 Dynamic response For a step change of magnitude M, U(s) = M/s, Equation (4.26) yields KM Y (s) = 2 2 s (τ s + 2ξτs + 1) (4. 27) The two poles of the second-order transfer function are given by the roots of the characteristic polynomial, τ 2 s 2 + 2ξτs + 1 = 0 (4. 28) and they are p1 = − ξ 2 −1 ξ + and τ τ p2 = − ξ 2 −1 ξ − τ τ (4. 29) Therefore, Equation (4.27) becomes K τ2 Y (s) = s ( s − p1 )( s − p2 ) (4. 30) The form of the response of y(t) will depend on the location of the two poles in the complex plane. Thus, we can distinguish three cases: Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 7 Case A: (over-damped response), when ζ > 1, we have two distinct and real poles. In this case the inversion of Equation (4.30) by partial fraction expansion yields ⎡ ⎛ ξ t t y (t ) = K ⎢1 − e −ξt τ ⎜ cosh ξ 2 − 1 + sinh ξ 2 − 1 2 ⎜ τ τ ⎢⎣ ξ −1 ⎝ ⎞⎤ ⎟⎥ ⎟⎥ ⎠⎦ (4. 31) Where cosh(.) and sinh(.) are the hyperbolic trigonometric functions defined by e α − e −α e α + e −α and cosh α = (4. 32) 2 2 Case B: (critically damped response), when ζ = 1, we have two equal poles (multiple pole). In this case, the inversion of Equation (4.30) gives the result sinh α = ⎡ ⎛ t⎞ ⎤ y (t ) = K ⎢1 − ⎜1 + ⎟e −t τ ⎥ (4. 33) ⎣ ⎝ τ⎠ ⎦ Case C: (Under-damped response), when ζ < 1, we have two complex conjugate poles. The inversion of Equation (4.30) in this case yields ⎡ ⎤ 1 y (t ) = K ⎢1 − e −ξt τ sin(ωt + φ )⎥ 1− ξ 2 ⎢⎣ ⎥⎦ where ω= 1− ξ 2 τ (4. 34) and ⎡ 1− ξ 2 ⎤ φ = tan ⎢ ⎥ ⎢⎣ ξ ⎥⎦ Several remarks can be made concerning the responses shown in Figure 7: 1. Responses exhibiting oscillation and overshoot (y/KM > 1) are obtained only for values of ζ less than one (Under-damped response). This response is initially faster than the other two responses; however, it does not reach steady-state earlier due to oscillations. Note that almost all under-damped responses are caused by the interactions of the controllers with the process units they control. 2. Large values of ζ yield a sluggish (slow) response (Over-damped response). The larger the value of ζ the more sluggish the system. Note that system response resembles a little the response of a first-order system to a unit step input. But when compared to a first-order response we notice that the system initially delays to respond and then its response is rather sluggish (Figure 8). Over-damped are the responses of multicapacity systems, which result from the combination of first-order systems in series. −1 Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 8 3. The fastest response without overshoot is obtained for the critically-damped case (ζ =1). y(t)/KM t/tau Figure 7 Dimensionless response of second-order system to input step change. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 9 1 First-order system 0.9 0.8 Second-Order system 0.7 y/KM 0.6 0.5 0.4 0.3 0.2 0.1 0 0 1 2 3 4 5 time 6 7 8 9 10 Figure 8 Comparison between first-order and second-order responses. Characteristics of under-damped systems Figure 9 Characteristics of an under-damped response. - Overshoot: Is the ratio of a/b, where b is the ultimate value of the response and a is the maximum amount by which the response exceeds its steady state value. It can be shown that it is given by the following expression: Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 10 ⎛ πξ OS = exp⎜ − ⎜ 1− ξ 2 ⎝ ⎞ ⎟ ⎟ ⎠ (4. 35) - Decay ratio: Is the ratio of the amount above the stead state value of two successive peaks, c/a. it can be shown that it can be calculated by the following equation: ⎛ 2πξ ⎞⎟ DR = exp⎜ − ⎜ 1− ξ 2 ⎟ ⎝ ⎠ - (4. 36) Rise time: tr is the the process output takes to first reach the new steady state value. Time to first peak: tp is the time required for the output to reach its first maximum value. Settling time: ts is defined as the time required for the process output to reach and remain inside a band whose width is equal to ± 5 % of the total change in the output. Period: Equation (4.34) defines the radian frequency, to find the period of oscillation P (i.e. the time elapsed between two successive peaks), use the well-known relationship ω = 2π/P; thus: 2πτ P= (4. 37) 1 − ξ2 4. Dynamic systems with dead time Time delay is inherent property of chemical processes. The transfer function of a time delay of θ units is given by G ( s ) = e − θs (4. 38) Consider a first-order system with a dead time θ between the input and the output. This system can be represented by a series of two systems as shown in Figure 10. For the firstorder system, we have the following transfer function: l[ y( t )] K (4. 39) = l[u( t )] τs + 1 while for the dead time we have: l[ y( t − θ)] = e − θs l[ y( t )] (4. 40) Therefore, the transfer function between the input u(t) and the delayed output y(t-θ) is given by: l[ y( t − θ)] Ke − θs = l[ u ( t )] τs + 1 (4. 41) Same argument can be used with second-order systems. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 11 l[ u( t )] K τs + 1 l[ y( t )] e − θs l[ y( t − θ)] Figure 10 Block diagram for first-order process with dead time Dynamic characteristics The fitting of the first order plus time-delay model to the step response, using the tangent method, requires the following steps, as shown in Figure 11: Figure 11 Graphical analysis of the process reaction curve to obtain parameters of a first-order plus time-delay model. 1. The process gain for the model is found by calculating the ratio of the change in the steady-state value of y to the size of step change M in x. 2. A tangent is drawn at the inflection point of the step response; the intersection of the tangent line and the time axis (where y = 0) is the time delay. 3. If the tangent is extended to intersect the steady-state response line (where y = KM), the point of intersection corresponds to time t = θ + τ. This method suffers from using only a single point to estimate the time constant. Use of multiple points may provide a better estimate. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 12 Polynomial approximations to e-θs Processes with dead time are difficult to control because the output does not contain information about current events. The introduction of exponent form results in a non-rational transfer function, which can not be put in the form of a ratio of two polynomials in s. Quite often the exponential term is approximated by the first- (Equation 4.42) or second-order Padé approximations (Equation 4.43) θ 1− s 2 e − θs ≈ (4. 42) θ 1+ s 2 e − θs θ θ2 1 − s + s2 2 12 ≈ θ θ2 1 + s + s2 2 12 (4. 43) Approximation of higher-order systems Systems with order that is higher than one can be represented by n G (s ) = ∏ G i (s ) = i =1 K n ∏ ( τis + 1) (4. 44) i =1 It can be approximated by low-order transfer function with dead time as follows G (s ) = Ke − θs τ1s + 1 (4. 45) where τ1 is the dominant time constant, i.e. dominated implies that the overall process transient process is determined primarily by a few large time constants; that is response modes that are much slower than the others. The dead time is defined as n θ = ∑ τi (4. 46) i =2 Dynamic systems with inverse response The dynamic behavior of certain processes shows an initial response which opposes in direction to what it ends up, Figure 12. Such behavior is called inverse response. Such behavior is the net result of two opposing effects. Systems show an inverse response if one of the roots of the numerator (i.e. one of the zeros of the transfer function) has positive real part. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 13 Figure 12 Inverse response 5. Examples Non-interacting system Two tanks are connected in series as shown in Figure 13. The time constants are τ2 = 1 and τ1 = 0.5; R1 = R2 = 1. Sketch the response of the level in tank 2 if a unit-step change is made in the inlet flow rate to tank 1. Solution q(t) h1 R1, q1(t) h2 R2 q2(t) Figure 13 Two-tank liquid level system: Noninteracting Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 14 A balance on tank 1 gives dh1 dt A balance on tank2 gives dh q1 − q2 = A2 2 dt The flow head relationships are given by the following expressions q − q1 = A1 q1 = h1 R1 h q2 = 2 R2 Equation (4.47) can be rearranged to give H1 ( s) R1 = , τ = AR Q ( s ) τ 1s + 1 H1 R Q1 ( s ) 1 = Q( s ) τ 1s + 1 (4. 47) (4. 48) (4. 49) (4. 50) Q1 = In the same manner, the following equations van be obtained for tank2 H 2 (s) R2 = Q1 ( s ) τ 2 s + 1 (4. 51) (4. 52) Having the transfer function for each tank, we can obtain the overall transfer function H2(s)/Q(s) by multiplying Equations (4.51) and (4.52) to eliminate Q1 H 2 (s) 1 R2 (4. 53) = ⋅ Q1 ( s ) τ 1s + 1 τ 2 s + 1 Note that all roots here are real; thus, this is an over-damped system. By comparing this equation with the general form of the over-damped system, it follows that τ 1 = τ (ξ + ξ 2 − 1) τ 2 = τ (ξ − ξ 2 − 1) (4. 54) It can be proved that H2(s) is H 2 (t ) = 1 − (2e − t − e −2t ) (4. 55) Generalization for several noninteracting systems in series Consider n noninteracting first-order systems as represented by the block diagram of Figure 14. The block diagram is equivalent to the relationships Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 15 X 1 (s) k1 = X o ( s ) τ 1s + 1 X 2 (s) k2 = X 1 (s) τ 2 s + 1 (4. 56) LLLLLL X n (s) kn = X n −1 ( s ) τ n s + 1 To obtain the overall transfer function, we simply multiply together the individual transfer functions; thus n X n ( s) k =∏ i X o ( s ) i =1 τ i s + 1 Xo (4. 57) k1 τ 1s + 1 X1 k2 τ 2s +1 Xn-1 X2 kn τ ns +1 Xn Figure 14 Noninteracting first-order systems Interacting system q(t) h1 R1, q1(t) h2 R2 q2(t) Figure 15 Two-tank liquid level system: Interacting Solution The balances on tanks 1 and 2 are the same as before and are given by Equations (4.47) and (4.48). However, the flow-head relationship for tank I is now (h − h ) q1 = 1 2 (4. 58) R1 Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 16 The flow-head relationship for R2 is the same as before. Expressing Equation (4.58) in terms of deviation variables gives (H − H 2 ) Q1 = 1 (4. 59) R1 Transforming model equations gives Q( s ) − Q1 ( s ) = A1sH1 ( s ) Q1 ( s ) − Q2 ( s ) = A2 sH 2 ( s ) R1Q1 ( s ) = H1 ( s ) − H 2 ( s ) (4. 60) R2Q2 ( s ) = H 2 ( s ) The combination of these equations gives H 2 (s) R2 = 2 Q( s ) τ 1τ 2 s + (τ 1 + τ 2 + A1 R2 ) s + 1 (4. 61) Notice that the difference between the transfer function for noninteracting system and the interacting system is the presence of the term A1R2 in the coefficient of s. To understand the effect of interaction on the transient of a system, consider a two-tank system for which the time constants are equal, if the tanks are noninteracting, the transfer function relating inlet flow to outlet flow is 2 Q2 ( s ) ⎛ 1 ⎞ =⎜ ⎟ Q( s ) ⎝ τs + 1 ⎠ The unit-step response for this transfer function is t Q2 (t ) = 1 − e −t τ − e −t τ τ (4. 62) (4. 63) If the tanks are interacting, the overall transfer function, according to Equation (4.61), is (assuming A1 = A2) Q2 ( s ) 1 = 2 (4. 64) Q( s ) τ + 3τs + 1 Notice that R2A2 = τ2 = τ. By application of the quadratic formula, the denominator of this transfer function can be written as Q2 ( s ) 1 = (4. 65) Q( s ) (0.38τs + 1)(2.62τs + 1) For this example, we see that the effect of interaction has been to change the effective time of the interacting system. One time constant has become considerably larger and the other smaller than the time constant of either tank in the noninteracting system. The response of Q2(t) to a unit step change in Q(t) for interacting case [Equation (4.65)] is Q2 (t ) = 1 + 0.17e −t 0.38τ − 1.17e −t 2.62τ Chapter 4: Dynamic Behavior of First-order & Second-Order Systems (4. 66) 17 1 0.9 0.8 Noninteracting 0.7 0.6 Q2 Interacting 0.5 0.4 0.3 0.2 0.1 0 0 0.5 1 1.5 2 2.5 t 3 3.5 4 4.5 5 Figure 16 Effect of interaction on step response of two-tank system From Figure 16, it can be seen that interaction slows up the response. This is understandable, when inlet to the first tank is stepped, the flow q1 will be reduced by the build-up of level in tank 2. In general, the effect of interaction on a system containing two first-order lags is to change the ratio of effective time constants in the interacting system. In terms of transient response, this means that the interacting system is more sluggish than the noninteracting system. Fitting of a first order system Figure 17 gives response of the temperature T in a continuous stirred-tank reactor to a step change in feed flow rate w from 120 to 125 kg/min. Find an approximate first-order model for the process for these operating conditions. Solution First note that Δw = M = 125-120 = 5 kg/min. Since ΔT = T(∞) – T(0) = 160 – 140 = 20 ºC, the process gain is o 20o C C ΔT K= = =4 kg min Δw 5 kg min Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 18 The time constant obtained from the graphical construction shown in Figure 17 is 5 min. note that this result agrees with the time constant when 63.2% of the response is complete, that is T = 140+0.632*20 = 152.6 ºC Consequently, the desired process model is T (s) 4 = W ( s ) 5s + 1 u(t) 125 w (kg/min) 120 y(t) 160 152.6 140 0 5 t Figure 17 Temperature response of a stirred-tank reactor for a step change in feed flow rate. Chapter 4: Dynamic Behavior of First-order & Second-Order Systems 19