Time Response of 1st and 2nd order systems. Pole dominance
advertisement

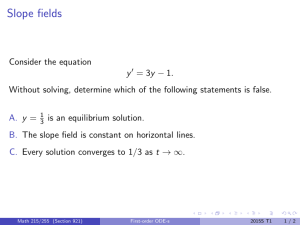
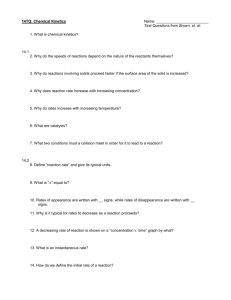
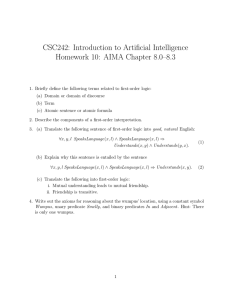
Cleveland State University MCE441: Intr. Linear Control Systems Lecture 7:Time Response Pole-Zero Maps Influence of Poles and Zeros Higher Order Systems and Pole Dominance Criterion Prof. Richter 1 / 26 Test Inputs ⊲ Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero Real inputs contain randomness (for example, noise): unpredictable. Test inputs help to predict response quality under other inputs. – – – – step inputs are useful to simulate sudden changes (startup, jump loading, etc) sinusoidal inputs are used to test frequency response (more later) impulses are used to simulate shock conditions ramp inputs are used to simulate transitions between setpoints 2 / 26 Pole-Zero Maps Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero Im ⊲ G(s) = (s−z1 )(s−z̄1 )(s−z2 ) (s−p5 )(s−p̄5 )(s−p2 )2 (s−p1 )(s−p4 )(s−p̄4 )(s−p5 )(s−p̄5 ) p5 p4 z1 z2 p2 z¯1 p1 Re p¯4 p¯5 3 / 26 First-Order Systems Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero First-order systems are described by the I/O differential equation ⊲ τ ċ + c = r(t) or in TF form C(s) 1 = R(s) τs + 1 The number τ is called the time constant of the system. The TF has one real pole at s = − τ1 . Step Response Applying the unit step input R(s) = 1 s gives the response − τt c(t) = 1 − e 4 / 26 First-Order Step Response Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ (Stable) first-order systems always track the step command (the error approaches zero asymptotically). The time it takes for the output to reach approx. 98% of its steady value is called settling time, also referred to as 2 % settling time. It equals 4 time constants. 5 / 26 First-Order Ramp Response Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ First-order systems cannot track a ramp command. The tracking error is always equal to the time constant. 6 / 26 Second-Order Systems Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ The standard form of a second-order system is: C(s) wn2 = 2 R(s) s + 2ζwn s + wn2 where wn and ζ are called the natural frequency (in rad/s) and damping ratio (dimensionless), respectively. The response will depend on the nature of the poles: Underdamped: 0 < ζ < 1 Marginally Stable: ζ = 0 Critically Damped: ζ = 1 Overdamped: ζ > 1 7 / 26 Case 1: Underdamped (0 < ζ < 1) Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ The poles are complex conjugates. The response to a unit step input is given by ! p −ζwn t e 1 − ζ2 −1 c(t) = 1 − p sin wd t + tan 2 ζ 1−ζ where wd is the damped natural frequency: p wd = wn 1 − ζ 2 The damped natural frequency is the one obtained by counting the cycles per unit time in an experimental (and underdamped) response and converting the result to radians per second. 8 / 26 Underdamped Case Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ Im p wd = wn 1 − ζ 2 Poles: −ζwn ± wd j cos β = ζ wn β −ζwn 0 Re −wd 9 / 26 Marginally Stable and Overdamped Cases Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ Marginally Stable Case (ζ = 0) When ζ = 0 the poles lie on the imaginary axis and the response to a step input is c(t) = 1 − cos wn t that is, the oscillation does not die out. The system oscillates with its natural frequency wn . Critically Damped Case (ζ = 1) When ζ = 1 we get a real pole of multiplicity two at s = −wn . The response is given by c(t) = 1 − e−wn t (1 + wn t). No oscillations occur for a step input. 10 / 26 Overdamped Case (ζ > 1) Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ When ζ > 1 the poles lie are real and unequal. The response features two decaying exponential terms (no oscillations): −s1 t −s t 2 wn e e c(t) = 1 + p − 2 s1 s2 2 ζ −1 where the poles are s1,2 = (ζ ± p ζ 2 − 1)wn 11 / 26 Normalized Second-Order Response Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ 12 / 26 Time-Domain Transient Specifications Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ Many practical design cases call for time-domain specifications Step response specs are often demanded (worst-case, drastic situation) Common specifications 1. 2. 3. 4. Rise time (Tr ) Peak time (Tp ) Percent overshoot (P.O.) Settling time (Ts ) 13 / 26 Transient Specs: Step Response Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ Second−Order Step Response Characteristics Overshoot Final Value 1.02*F.V FV 0.98*F.V Setpoint Setpoint 0 0 Tr Tp Steady Error Tset 2% Time (sec) 14 / 26 Design Aids: 2nd-Order Systems Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero 2 % settling time: ts = Rise time: tr = π−β wd Peak time: tp = π wd Peak value: Mpt = (e 4 ζwn −( √ ζ 1−ζ 2 )π Percent overshoot: P.O.= 100e + 1)y(∞) −( √ ζ 1−ζ 2 )π ⊲ 15 / 26 Design Chart: 2nd-Order Systems Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ 16 / 26 Pole Locations and Response Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ 17 / 26 Effect of Zeros Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero The above design formulas are valid when no zeros are present. In general, zeros spoil the response by increasing the overshoot. If zeros are found on the r.h.p., the system is said to be nonminimum phase, and the response is worsened. Zeros may be neglected in some cases (more about this later in this lecture) ⊲ 18 / 26 Higher-Order Systems: Pole Dominance Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ When more than two poles are present, or when two distinct real poles are present, it can be difficult to predict the response without computer simulation Frequently, one or two poles are dominant. Remember that a each single real pole gives rise to a term of the form s(s+a) when a step input is applied. If we invert the term, the contribution of the pole is 1 − e−at . So if the time constant of the pole (1/a) is very small, the transient is very short and does not contribute much to the overall response. On the other hand, poles with large time constants are the ones dictating the response. We say that such poles are dominant. The same applies to complex conjugate pairs, where the time constant taken into consideration is ζw1 n . 19 / 26 Pole Dominance Criterion Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ Begin by finding all poles of the TF and finding their time constants. Remember: For a real pole at s = −a, the time constant is 1/a, and for a complex conjugate pair with 0 < ζ < 1, it is ζw1 n . Sort out the time constants: (high) τ1 , τ2 ..., τn (low). Attempt to find a gap of a factor of eight or more between two consecutive time constants, starting with the highest. If such a gap is found, neglect all poles on the fast side of the gap (small time constants). Careful! when reassembling the TF. You may be inadvertently changing the TF gain (a.k.a. DC gain): Make sure that the responses to a step input have the same final value. If not, correct the reduced TF with an appropriate constant. 20 / 26 Pole Dominance: Example Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero G(s) = 3 s4 +6.4s3 +14.4s2 +27.2s+32 Poles: s1 = −2, s2 = −4, s3,4 = −0.2 ± 1.989i(ζ = 0.1, wn = 2). Time constants for real poles: τ1 = 0.5 and τ2 = 0.25. For the complex poles : τ = 5. 3 The factored TF is: G(s) = . 2 (s+2)(s+4)(s +0.4s+4) Time constants: 5, 0.5, 0.25. A gap of a factor of 10 is found, therefore we neglect the fast poles at s2 = −4 and s1 = −2. If we simply eliminate the factors (s + 2) and (s + 4), we have a gain mismatch. In order to have the same final value, we correct the gain to obtain: Gr (s) = 3/8 s2 + 0.4s + 4 Check with the final value theorem: lims→0 sGr (s) = lims→0 sG(s). ⊲ 21 / 26 Effect of a Zero Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero For second-order systems, we can predict the effect of a single real zero on the overshoot. Consider G(s) = 2 (wn /a)(s + a) 2 s2 + 2ζwn s + wn If a/ζwn > 8, neglect the zero due to dominance: Gr (s) = 2 wn 2 s2 +2ζwn s+wn . If not, use the chart: ⊲ 22 / 26 Example Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero Sketch the response of the following TF when the input is a step of size 2: 3(s + 5) G(s) = (s + 23)(s2 + 5s + 16) ⊲ 23 / 26 Solution Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ 24 / 26 Solution Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero ⊲ 25 / 26 Matlab Simulation ⊲ 0.1 c(t )=0.0919 p 0.09 0.08 0.07 c(∞)=0.0815 Overshoot=12.76% 0.06 c(t) Test Inputs Pole-Zero Maps First-Order Systems First-Order Step Response First-Order Ramp Response Second-Order Systems Time-Domain Transient Specifications Transient Specs: Step Response Design Aids: 2nd-Order Systems Design Chart: 2nd-Order Systems Pole Locations and Response Effect of Zeros Higher-Order Systems: Pole Dominance Effect of a Zero 0.05 0.04 0.03 0.02 t =1.3 s s 0.01 0 0 0.5 1 1.5 2 2.5 t 3 3.5 4 4.5 5 26 / 26