Effect of Process Parameters on Depth of Penetration in Gas
advertisement

TJER 2012, Vol. 9, No. 1, 64-79
Effect of Process Parameters on Depth of Penetration in
Gas Tungsten Arc Welded (GTAW) 202 Grade Stainless
Steel Plates Using Response Surface Methodology
R Sudhakaran*a, V Vel-Muruganb and PS Sivasakthivelc
a Department
of Mechanical Engineering, Kumaraguru College of Technology, Coimbatore - 641006, Tamilnadu, India.
b Sree Sakthi Engineering College, Coimbatore, India
c C Sastra University, Thanjavur, India
Received 13 March 2011; accepted 12 July 2011
Abstract: The quality of a welded joint is directly influenced by the welding input parameters.
Inadequate weld bead dimensions such as shallow depth of penetration may contribute to failure of a
welded structure since penetration determines the stress carrying capacity of a welded joint. In this study,
the regression model was used to establish a relationship between welding input parameters and depth of
penetration for gas tungsten arc welding of 202 grade stainless steel plates. A five level four factor central composite rotatable design (CCRD) with 31 experimental runs was used to conduct the experiments.
The process control parameters chosen for the study are welding current (I), welding speed (V), welding
gun angle (T) and shielding gas flow rate (Q). A mathematical model was developed to correlate the
process parameters to depth of penetration. The developed model was then compared with the experimental results; it was found that the deviation falls within the limit of a 95% confidence level.
Additionally, the results obtained from the mathematical model were more accurate in predicting depth
of penetration. The direct and interactive effects of the process parameters are also discussed.
Keywords: Depth of penetration, Central composite rotatable design, Analysis of variance, Stainless steel
&*]~|DfEHb´*3°¡D*r*¡D&*bpDÇ~zmgD*5b=b²6¡B¯*Æ1°*<¢<ib£D*E*¡<Ì.&bf£p~zD*f+bmg~6°*f£mE*]sg~6b+D3H
£g~6b£~66eH eb/xE &*#xC*2¡~64
&*
jEbpD*f£<$b.&*+*HxDf)É´*Ì=2b+&°*(*bpD*f£<¯f1*]D*H,x.'¡´*E*¡Db+x~7bcE~{+x.&bg-bpD*+*H4,2¡/(*|s´*
*]sg~6*f~6*4]D* wG¯®]DfE¡p´*+*HxDi*2b/(°*«,4]B2]pJD3&°¡p´*£D*~{A¯]<b~z-b§4*Æ1°*<fDbp~9
fEHb´*f/42¥3d~|D*r*¡D&°Ç~zmgD*5b=b²6¡D*Æ1°*<HbpD*]<b12(°*E*¡<Í+fBÉ<$bcD4*]pF°*o3b¿
f1*]D*,x£~zD*E*¡<(*e4bmgD*$*x/(*¯f+x©E£~|gD*fcCxEfJ4¡¹E*¡<f+4&*HibJ¡g~zEf~z1EfD'¡EhE]sg~6*H&*]~|D
k£0J4]gD*5b=A]-]EHbpD*,*2&*fJH*5HbpD*f<x~6HbpD*¯]sg~z´*4b£gD*¤Gf~6*4]D* wDbG4b£g1*®¤gD*Hf£D*fcB*xE¯
J*xpF°*&*]/HHf£cJxmgD*n)bgD*E]sg~z´*o3¡D*fF4bEh­bC*Æ1°*<Eib£D*E*¡<+xD¤~9bJ4o3¡¿xJ¡-®
®bC*Æ1°*+'¡cgD*¯fB2ÈC&*hFbC¤~9bJxD*o3¡D*Eb£<¡~|²*®¤gD*n)bgD*&*¶(*fAb~9(*f.I¡g~zE2H]0~9
ib£D*E*¡Df£<bgD*H,x~7bc´*4b.%°*f~{BbEb~¦J&*
&*]~|DHb´*3°¡D*JbcgD*£«¥4¡¹dCxExJH]-£~|-*Æ1°*< fD*]D*ibD*
1. Introduction
Gas tungsten arc welding (GTAW) is an arc welding process that produces a coalescence of metals by
heating them with an arc between a non-consumable
electrode and base metal. It is commonly used for
welding hard-to-weld metals, such as aluminium,
stainless steel, magnesium and titanium (Cary 1989).
________________________________________
*Corresponding author’s e-mail: absudha@yahoo.com
GTAW quality is strongly characterized by the depth
of penetration. This is because shallow depth of penetration may contribute to failure of a welded structure
since penetration determines the stress carrying capacity of a welded joint (Samati 1986). The input welding
process variables which influence the weld bead penetration must therefore be properly selected to obtain an
acceptable weld bead penetration and hence a high
65
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
Table 1. Chemical composition of stainless steel 202 grade
quality joint (Konkol, Koons 1978). Shyu et al.
(2008) investigated the effect of oxide fluxes on weld
morphology, arc voltage, and mechanical properties
with tungsten inert gas (TIG) welding of 5 mm thick
austenitic stainless steel plates. The experimental
results indicate that the increase in penetration is significant with the use of Cr2O3, TiO2 and SiO2. Siva et
al. (2009) optimized the weld bead parameters of nickel-based over lay deposited by plasma transferred arc
surfacing. The results showed that penetration is
increased when the welding current is increased and
decreased when travel speed is increased. Mostafa,
Khajavi (2006) optimized welding parameters for
welding penetration in the flux-core arc welding
(FCAW) process. They developed a mathematical
model for predicting weld penetration as a function of
welding process parameters. The results showed that
weld penetration attains its maximum value when
welding current, arc voltage, nozzle to plate distance,
and the electrode-to-work angle are maximized and
welding speed is minimized. Tarang, Yang (1998) optimized the weld bead geometry in GTAW. They
employed the Taguchi method to formulate the experimental lay out and analysed the effect of process
parameters on weld bead geometry. Ghazvinloo et al.
(2010) studied the effects of electrode to work angle,
filler diameter, and shielding gas type on weld penetration of HQ 130 steel joints produced by gas metal arc
welding (GMAW). They showed that increasing the
electrode-to-work angle increased the depth of penetration and an increase in filler diameter resulted in a
decrease in weld penetration. Thao, Kim (2009)
developed an interaction model for predicting bead
geometry for lab joints in the GMAW processes. They
conducted experiments based on full factorial design
with two levels of five process parameters to obtain
bead geometry in the GMAW process. They found
that welding voltage, arc current, and welding speed
and angle have a large and significant effects on bead
geometry. Menaka et al. (2005) estimated the bead
width and depth of penetration during welding by
infrared thermal imaging. Gridharan, Murugan (2007)
investigated the pulse GTAW process parameters for
the welding of AISI 304L stainless steel sheets. They
developed mathematical models by regression analysis to predict penetration, and bead width and area.
They concluded that weld bead parameters predicted
by the models were found to confirm observed values
with high accuracy. A lot of work has been carried out
to predict bead penetration for the GMAW and friction stir welding processes. There is very little pub-
lished information available with regard to the modeling of penetration in 202 grade stainless steel GTAW
plates. More over the interaction effects of process
parameters on weld penetration have not been discussed. Hence, an attempt was made to correlate
GTAW process parameters such as welding current,
welding speed, shielding gas flow rate, and welding
gun angle with depth of penetration. A statistically
designed experiment based on a central composite
rotatable design was employed for the development of
a mathematical model (Cochran, Cox 1987). The
direct effect and interactive effects of process parameters on depth of penetration are studied. The developed
model was very useful in quantitatively determining
the depth of penetration.
2. Experimental Procedure
The experiments were designed and based on a
four-factor-five-level central composite rotatable
design (CCRD) with full replication technique
(Montgomery 2005). These experiments were conducted as per the design matrix using a Lincoln V 350
PRO electric digital welding machine. A servo motor
driven manipulator was used to maintain a uniform
welding speed. The main experimental setup used consisted of a traveling carriage with a table for supporting the specimens. A power source was kept ready. A
welding gun was held stationary in a frame above the
table and was fitted with an attachment to maintain the
required nozzle to plate distance and welding gun
angle, respectively. The nozzle-to-plate distance was
kept constant at 2.5 mm throughout the experimentation process. A high frequency attachment was used to
generate the arc at this distance. Test plates of 100 mm
X 30 mm X 5 mm were cut from grade 202 stainless
steel plates and one surface was cleaned to remove
oxide scaleing and dirt before welding. The chemical
composition of the AISI stainless steel plate is given in
Table 1.
Argon gas with flow rates between 5 and 25
liters/minute was used for shielding. The purpose of
using the shielding gas was to protect the weld area
from atmospheric gases such as oxygen, nitrogen, carbon dioxide, and water vapour. The welding machine
and manipulator used for conducting the experiments
are shown in Fig. 1.
3. Plan of Investigation
The research was carried out in the following steps:
66
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
(a)
(b)
Figure 1. Welding machine (a) and manipulator (b)
1.
2.
3.
4.
5.
6.
7.
8.
Identification of process parameters
Finding the limits of the process parameters
Developing the design matrix
Conducting the experiments
Measuring the response, i.e., Depth of penetration
Developing the mathematical model
Checking the validity and adequacy of the model
Analyzing the results
3.1 Identification of Process Parameters
The independently controllable process parameters
influencing depth of penetration were identified to
enable the carrying out of experimental work and
developing the mathematical model. These are welding current (I), welding speed (V), shielding gas flow
rate (Q) and welding gun angle (T),
3.2 Finding the Limits of the Process Parameters
The working ranges of all selected factors were
fixed by conducting trial runs. This was carried out by
varying one of the factors while keeping the rest as
constant values. The working range of each process
parameter was determined by inspecting the bead for a
smooth appearance without any visible defects such as
surface porosity, undercuts, etc. The upper limit of a
given factor was coded as (+2) and the lower limit was
coded as (-2). The coded values for intermediate values were calculated using Eq. (1).
(1)
Where Xi is the required coded value of a variable
X and is any value of the variable from Xmin to Xmax.
The selected process parameters with their limits and
notations are given in Table 2.
3.3 Development of Design Matrix
The design matrix chosen to conduct the experiments was a five-level-four-factor (VVRD) consisting
of 31 sets of coded conditions and comprising a half
replication 24 = 16 factorial design plus eight star
points and seven centre points. All welding variables
at the intermediate level (0) constitute the centre points
while the combination of each welding variables at
either its lower level (-2) or its higher level (+2) with
the other two variables at the intermediate level constitute the star points. Thus the 31 experimental runs
allowed the estimation of linear, quadratic and twoway interactive effects of the process variables on the
depth of penetration. Experiments were conducted at
random to avoid schematic errors creeping into the
experimental procedure.
3.4 Recording the Responses
To measure the depth of penetration the following
processes were carried out on the specimens: (1) sectioning, (2) grinding, (3) polishing, (4) etching and (5)
profile tracing.
Sectioning: The transverse sections of each weld
were cut using a bans saw. Care was taken to avoid
deformation of the sensitive austenitic grade material.
Grinding: Griding was performed in order to remove
the cold work from cutting and was done at speeds of
approximately 300 RPM.
Polishing: After grinding the specimens were rough
polished by hand. In order to obtain better edge flatness, the specimens were polished using silicon carbide abrasive papers of grades 100, 220, 400, 600 and
800, respectively. The specimens were then polished
using an abrasive-slurry of alumina (Al2O3) and water
(H2O) on a polishing machine.
Etching: After polishing, the specimens underwent
etching. Etching was necessary for examining the
67
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
Table 2. Welding parameters and their levels
microstructure of the weld bead. The etchant used was
Marble's reagent which is a mixture of HCL (50 ml),
CuSO4 and H2O (50 ml).
The polished faces of each specimen were swabbed
for about 50 - 60 seconds with the etchant in order to
reveal the weld bead.
Profile Tracing: The bead profiles of the specimens
were traced using a reflective type optical profile projector. The profile projector used is shown in Fig. 2.
Figure 3. Traced bead profile
Figure 4. Welded specimens
Figure 2. Profile projector used for tracing the weld
bead
The traced bead profiles were scanned in order to
determine the depth of penetration. The depth was
measured with the help of AUTOCAD software. The
traced bead profile is shown in Fig. 3 and the welded
specimens are shown in Fig. 4.
The design matrix and measured value of depth of
penetration are shown in Table 3.
For experimental runs 25 through 31, all welding
conditions remained the same but the response varieds
slightly as shown in the above table. This is due to the
effect of unknown and unpredictable variables called
noise factors which creep into the experiments. To
account for the impact of these unknown factors on the
response repeated runs were included in the design
matrix.
3.5 Development of Mathematical Model
A procedure based on regression was used for the
development of a mathematical model and to predict
the depth of penetration (Montgomery, Peck 2005).
The response surface function representing angular
distortion can be expressed as D = f (I, V, Q, T) and
the relationship selected is a second order response
surface for k factors is given by Eq. (2).
(2)
68
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
Table 3. Design matrix and measured value of response
where bo is the free term of the regression equation.
The coefficients b1, b2, b3, b4 and b5 are linear terms.
The coefficients b11, b22, b33, b44 and b55 are quadratic
terms and the coefficients b12, b13, b14, b15, b23, b24,
b25, b34, b35 and b45 are interaction terms
(Montgomery and Peck 2005). The values of the coefficients of the polynomial are calculated by regression
with the help of Eqs. (3) through (6).
(3)
(4)
(5)
(6)
Statistical software package (Systat Version11 - San
Jose, CA) was used to calculate the values of these
coefficients. An initial mathematical model was developed using the coefficients obtained from the above
equations. The mathematical model is as follows:
69
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
(7)
3.6 Testing the Coefficients for Significance
The value of the regression coefficients gives an
idea as to what extent the control parameters affect the
response quantitatively. The less significant coefficients are eliminated along with the responses with
which they are associated without sacrificing much of
the accuracy. This is done by using student's t - test
(Yang et al. 1993) and by finding p-value. According
to this test, when the calculated value of t corresponding to the coefficient exceeds the standard tabulated
value for the probability criterion kept at 0.75, the
coefficient becomes significant. Also, if the p-value of
the coefficient is less than 0.05, then the coefficient
becomes significant. Otherwise, it remains insignificant. The p-value of all the coefficients is given in
Table. 4. The final mathematical model was developed using only the significant coefficients.
Table 4. P-value of coefficients in the mathematical
model
evident from the table that the full model has the higher value of adjusted square multiple R than the reduced
model and the reduced model has lesser values of
standard error of estimate than that of the respective
full model. Hence the reduced model is better than the
full model.
3.7 Checking the Adequacy of the Model
The adequacy of the model was tested using the
analysis of variance technique (ANOVA). As per this
technique (Gunaraj, Murugan 2000), the calculated
value of the F - ratio of the model developed should
not exceed the standard value of the F - ratio for a
desired level of confidence (i.e., 95%), and the calculated value of the R - ratio of the model developed
should exceed the standard tabulated value of the R ratio for the same confidence level. If these conditions
are fulfilled, the model is considered to be adequate.
The results of the ANOVA are presented in Table 6. It
is evident from the table that the model is adequate.
Mean Sum of Squares = Sum of Square Terms/DOF
F ratio = Ms of Lack of Fit/ Ms of Error Terms
R ratio = Ms of First Order Term & Second Order
Term/ MS of Error Term
F ratio (13, 8, 0.05) = 3.26
R ratio (8, 9, 0.05) = 3.23
4. Results and Discussion
The coefficients which have p-value greater than
0.05 were eliminated from Table 4. The final mathematical model as determined by the above analysis is
given by Eq. (8).
(8)
The square multiple values of R of the full model
and the reduced model are presented in Table 5. It is
The mathematical model developed can be used to
predict depth of penetration by substituting the values
of the respective process parameters. The influence of
the process parameters on the depth of penetration was
studied using the developed model. The direct effect of
process parameters were studied using the developed
model. The direct effect was studied by keeping all the
process parameters was the middle level except the
parameter whose direct effect were studied. The interaction of the parameters is studied by keeping all the
parameters at the middle level except the parameters
whose interaction effects are studied. The direct effect
of all the parameters and the interaction effects of
welding process parameters which have strong interaction on depth of penetration are discussed below.
4.1 Direct Effect of Welding Speed on Depth of
Penetration
Figure 5 shows the direct effect of welding speed
on depth of penetration. Welding speed is one of the
main factors that control heat input and bead width.
The bead width and dimensions of the heat affected
zone decreases with the increase in welding speed.
This is because heat input is inversely proportional to
welding speed. Due to the above factors the depth of
70
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
Table 5. Comparison of square multiple ‘R’ values and standard error of estimate for full and reduced models
Table 6. Results of ANOVA analysis
SS - Sum of squares, DOF - Degree of freedom
1.2
1
0.8
I = 90 amps
Q = 15 liter/min
T 0.6
0.4
0.2
0
170(-2)
180(-1)
190(0)
Welding Speed mm/min
200(1)
210(2)
Figure 5. Direct effect of welding speed on depth of penetration
penetration decreases with the increase in welding
speed.
4.2 Direct Effect of Welding Current on Depth
of Penetration
Figure 6 shows the direct effect of welding current
on depth of penetration. Figure illustrates that when
the welding current increases, the heat input increases.
The increase in heat input results in preheating of the
work piece during forward welding. This results in
more melting of base metal. Hence there is an increase
in depth of penetration as welding current increases.
4.3 Direct Effect of Welding Gun Angle on
Depth of Penetration
Figure 7 represents the direct effect of welding gun
angle on depth of penetration. Figure 7 clearly demonstrates that the depth of penetration is less at lower gun
angles and increases at higher gun angles, there is less
preheating of the work piece as well as less melting of
the base metal. At higher gun angles the preheating of
the base metal is high as the base metal become more
exposed to the arc and there is more an increased of
the base metal. Hence there is less depth of penetration at lower gun angles and more penetration at higher gun angles. The depth of penetration is not significantly affected due to shielding gas flow rate.
4.4 Interactive Effect of Welding Current and
Welding Speed on Depth of Penetration
Figure 8 represents the interactive effect of welding
speed and welding current on depth of penetration.
Figure 8 shows that the depth of penetration decreases
when varying the weld current between 70 and 90
amps with an increase in welding speed from 170
mm/min to 210 mm/min. The decrease in depth of
penetration is about 80% for the welding current at 70
amps. It falls to 60% for the welding current at 80
71
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
2
1.8
V = 190 mm/min
Q = 15 litre/min
T 1.6
1.4
1.2
0
0.8
0.6
0.4
0.2
0
70(-2)
809-4)
900)
Welding Current amps
100(1)
110(2)
Figure 6. Direct effect of welding current on depth of penetration
1.4
V = 150 mm/min
I = 90 amps
Q = 15 litre/min
1.2
1
0.8
0.6
0.4
0.2
0
50(-2)
60(-1)
70(0)
Welding Gun Angle Degrees
80(1)
90(2)
Figure 7. Direct effect of welding gun angle on depth of penetration
amps and further decreases to 30% for the welding
current at 90 amps for the corresponding increase in
welding speed. The decrease in depth of penetration
with a lower welding current may be due to the fact
that at lower welding currents, the pre heating of the
work piece and the base metal is also less, and the
increase in welding speed also controls the heat input.
The trend changes for the other two levels of welding
current. The depth of penetration increases with the
welding current set at 100 amps as the welding speed
is varied from 170 mm/min to 210 mm/min. The
increase is about 3% at 100 amps and is about 25% at
110 amps. This is because at a lower current the effect
of the welding speed is more significant than the effect
of the welding current. However, as the welding cur-
rent increases its effect becomes more significant than
that of the welding speed.
These effects are further explained with the help of
a response surface plot as shown in Fig. 9. From the
contour surface, it is noted that depth of penetration
reaches a maximum of about 2 mm when V and I are
at 210 mm/min and 110 amps. It reaches a minimum
of about 0.2 mm when V and I are at 210 mm/min and
70 amps.
4.5 Interactive Effect of Welding Current and
Shielding Gas Flow Rate on Depth of
Penetration
Figure 10 shows the interactive effect of a welding
72
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
Welding Speed mm/min
Figure 8. Interactive effect of welding current and welding speed on depth of penetration
P at -2 Level
P at +2 Level
P at 0 Level
Figure 9. Response surface for interactive effect of welding current and welding speed on depth of penetration
current and the shielding gas flow rate on depth of
penetration. As illustrated in Fig. 10, when the welding current is maintained at 70 and 80 amps and as the
shielding gas flow rate increases from 5 liters/minute
to 25 liters/minute, the depth of penetration decreases.
The decrease is about 84% for welding current at 70
amps and 59% at 80 amps. This is due to the fact that
the lower current, the preheating of the work piece is
less and there is less melting of the base metal. As a
result, a certain amount of the heat is carried away by
the shielding gas. The effect of the shielding gas flow
rate is more significant than that of the welding current, hence depth of penetration decreases whereas at
I = 90 amps, the effect of welding current balances the
effect of shielding gas flow rate. Therefore, depth of
penetration remains the same. For other levels of
welding current i.e., 100, 110 amps there is an increase
in depth of penetration with an increase in the shield-
73
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
Shielding Gas Flow Rate Litre/min
Figure 10. Interactive effect of shilding gas flow rate and welding current on depth of penetration
P at -2 Level
P at +2 Level
P at 0 Level
Figure 11. Response surface for interactive effect of shielding gas flow rate and welding current on depth
of penetration
ing gas flow rate from 5 liters/minute to 25
liters/minute.
This is because at the higher current,
the effect of the welding current is more significant
than that of the shielding gas flow rate. At the higher
current, the preheating of the base metal is high. This
results in more melting of the base metal depth of penetration increases. These effects are further explained
with the help of a response surface plot as shown in
Fig. 11. From the contour surface, it is found that
depth of penetration reaches a maximum of 2.5 mm
when the welding current and shielding gas are main-
tained at 110 amps and 25 liters/minute, and reaches a
minimum of 0.2 mm when the shielding gas and welding current are at 25 liters/minute and 70 amps.
4.6 Interactive Effect of Welding Current and
Welding Gun Angle on Depth of Penetration
Figure 12 shows the interactive effect of the welding current and the welding gun angle on depth of penetration. From the information in Fig. 12, it is
observed that the depth of penetration marginally
decreases at a 60° and 70° welding gun angle for all
74
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
2.5
2
1.5
V = 190 mm/min
Q = 15 litre/min
1 = 110 amps
1 = 100 amps
1 = 90 amps
1
1 = 80 amps
1 = 70 amps
0.5
0
50(-2)
60(-1)
70(0)
80(+1)
Welding Gun Angle Degrees
90(+2)
Figure 12. Interactive effect of welding gun angle and welding current on depth of penetration
P at +2 Level
P at -2 Level
P at 0 Level
Figure 13. Response surface for interactive effect of welding current and welding gun angle on depth
penetration
levels of welding current. This may be due to the fact
that at 60° and 70° gun angle the exposure of the base
metal to the arc is less as compared to the higher gun
angles of 80° and 90°. At 80° and 90° gun angles, the
depth of penetration increases for all levels of welding
currents. This is due to the fact that the welding current
increases the heat input and results in more pre heating
of the work piece. It also causes more melting of the
base metal. The increase in gun angle gives the base
metal more exposure to the arc. Hence the combined
effect of welding gun angle and welding current
results in an increase in depth of penetration. These
effects are further explained with the help of the
response surface plot shown in Fig. 13. From the contour surface it is observed that penetration reaches a
maximum of 2.2 mm when the welding gun angle and
welding current are 90° and 110 amps, respectively,
and reaches a minimum of 0.8 mm when the welding
gun angle and welding current are 50° and 70 amps
respectively.
4.7 Interactive Effect of Welding Speed and
Welding Gun Angle on Depth of Penetration
Figure 14 shows the interactive effect of welding
75
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
1.6
Q = 15 Litre/min
1 = 90 amps
1.4
1.2
1
0.8
0.6
0.4
0.2
0
50(-2)
60(-1)
70(0)
Welding Gun angle Degrees
80(1)
90(2)
Figure 14. Interactive effect of welding gun angle and welding current on depth penetration
P at -2 Level
P at +2 Level
Figure 15. Response surface for interactive effect of welding gun angle and welding speed on depth of
penetration
speed and welding gun angle on depth of penetration.
The figure shows a marginal increase in depth of penetration for all levels of welding speed from 170
mm/min to 210 mm/min as the welding gun angle is
increased from 50° to 90°. This is due to the fact that
an increase in gun angle results in more exposure of
the base metal to the arc which increases the penetration but the effect of the welding speed is to decrease
the heat input there by decreasing the depth of penetration. The combined effects of the two parameters
result in a marginal increase in depth of penetration.
These effects are further explained with the help of the
76
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Shielding Gas Flow Rate Litre/min
Figure 16. Interactive effect of shielding gas flow rate and welding speed on depth of penetration
P at -2 Level
P at 0 Level
Figure 17. Response surface for interactive effect of sheidling gas flow rate and welding speed on depth of
penetration
response surface plot shown in Fig. 15. From the contour surface it can be observed that depth of penetration reaches a maximum of 1.5 mm when the welding
gun angle and welding speed are at 90° and 170
mm/min respectively and reaches a minimum of 0.8
mm when the welding gun angle and welding current
are at 50° and 210 mm/minute, respectively.
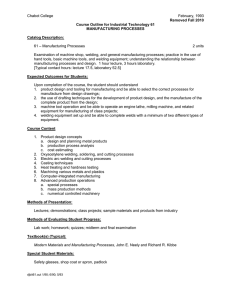
4.8 Interactive Effect of Shielding Gas Flow
Rate and Welding Speed on Depth of Penetration
Figure 16 shows the interactive effect of welding
speed and shielding gas flow rate on depth of penetration. From the figure it can be observed that the depth
of penetration decreases from a high value of 1.6 mm
to 0.7 mm and 1.2 mm to 0.8 mm for welding speeds
77
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
Shielding Gas Flow Rate Litre/min
Figure 18. Interactive effect of shielding gas flow rate and welding gun angle on depth of penetration
P at -2 Level
P at +2 Level
Figure 19. Response surface for interactive effect of shielding gas flow rate and welding gun angle on depth
of penetration
at 170 mm/minute and 180 mm/minute, whereas at
200 mm/minute and 210 mm/minute it marginally
increases from a low value of 0.6 mm to 1 mm and 0.3
mm to 1.2 mm as the shielding gas flow rate is varied
from 5 litre/minute to 25 litre/minute. Even though
there is an increase in depth of penetration at 200
mm/minute and 210 mm/minute the increase is from a
very low value compared to that of 170 mm/minute
and 180 mm/minute. Hence, the general effect of the
welding speed is to decrease the depth of penetration.
When the welding speed is at 190 mm/minute there is
no significant change in the depth of penetration. This
is because V = 190 mm/minute acts as a middle level.
The effect of the welding speed and shielding gas flow
rate remains the same at this level. This results in no
change in depth of penetration. The above effects are
due to the combined effects of welding speed and
shielding gas flow rate on depth of the penetration.
These effects are further explained with the help of the
response surface plot shown in Fig. 17. From the contour surface the depth of penetration reaches a maximum of about 1.2 mm when the shielding gas flow rate
and welding speed are at 25 litre/minute and 210
mm/minute, respectively. It reaches a minimum of
78
Effect of Process Parameters on Depth of Penetration in Gas Tungsten Arc Welded 202 Grade Stainless Steel Plates using
Response Surface Methodology
Table 7. Results of conformity test
Predicted values of depth of penetration mm
Figure 20. Scatter diagram for depth of penetration
about 0.6 mm when the shielding gas flow rate and
welding speed are at 5 litre/minute and 200
mm/minute, respectively.
4.9 Interactive Effect of Shielding Gas Flow
Rate and Welding Gun Angle on Depth of
Penetration
Figure 18 shows the interactive effect of shielding
gas flow rate and welding gun angle on depth of penetration. Figure 18 shows that the depth of penetration decreases with the welding gun angle at 50° and
60° as the shielding gas flow rate is varied from 5
liters/minute to 25 liters/minute. The decrease is about
60% when the gun angle is at 50°, and 38% when the
gun angle is at 60°. This is due to the fact that at lower
gun angles the exposure of the parent metal to the arc
is less. Additionally, some heat is carried away by the
shielding gas. There is a marginal increase in depth of
penetration when the gun angle ais t 70°. It increases
when the gun angles is at 80° and 90°. This is due to
the fact that at higher gun angles the exposure of the
parent metal to the arc incrases, which results in more
melting of the parent metal. These effects are further
explained with the help of the response surface plot
shown in Fig. 19. From the contour plot, it is easily
observed that the depth of penetration reaches a maximum of 1.7 mm when the gun angle and shielding gas
flow rate are at 90° and 25 liters/minute, respectively.
It reaches a minimum of 0.5 mm when the gun angle
and shielding gas flow rate are at 50° and 25
liters/minute, respectively.
5. Validation of the Results
Conformity tests were conducted with the same
experimental set up to validate the accuracy of the
results obtained. The results of the conformity test are
79
R Sudhakaran, V Vel-Murugan and PS Sivasakthivel
presented in Table 6. From the conformity test, it was
found that the developed model is able to predict depth
of penetration with reasonable accuracy. The validity
of the model was tested again by drawing a scatter diagram which show the closeness between observed and
predicted values. The scatter diagram is showns in Fig.
20. The results show that for the developed model the
accuracy is 95%.
6. Conclusions
The second order quadratic model can be effectively
used to predict depth of penetration in GTAW of stainless steel 202 grade plates. Central composite design
can be conveniently used to predict the direct and
interactive effects of different combinations of process
parameters within the range of investigation. The predicted depth of penetration is compared with the
experimental results and the deviation falls within the
accepted limit of 95% confidence level. The maximum depth of penetration obtained from experimental
studies was 1.77 mm when the process parameters
such as welding current was maintained at 110 amps
and welding speed, shielding gas flow rate and welding gun angle were maintained at 190 mm/min, 15
liter/min and 70° respectively. The minimum depth of
penetration obtained from experimental studies was
0.33 mm when the process parameters such as welding
current, welding speed, shielding gas flow rate, and
welding gun angle were maintained at 80 amps, 200
mm/minute, 10 liter/min and 80°, respectively. Out of
the four process parameters selected for investigation,
welding current has the strongest effect on depth of
penetration. Welding speed has negative effect on
depth of penetration, and shielding gas flow rate has
no significant effect on depth of penetration. The
mathematical model developed in this work from the
experimental data can be employed to control the
process parameters and achieve the desired weld quality in butt welded plates.
References
Cary HB (1989), Modern welding technology.
Prentice Hall, Englewood Cliffs, New Jersey.
Cochran WG, Cox GM (1987), Experimental designs.
John Wiley and Sons, New York.
Ghazvinloo HR, Honarbakhsh RA, Shadfar N
(2010), Effect of the electrode to work angle.
Filler Diameter and Shielding Gas on Weld
Geometry of HQ 130 Steel Joints Produced by
Robotic GMAW, Indian J. of Science and
Technology 3:26-30.
Gunaraj V, Murugan N (2000), Prediction and optimization of weld bead volume for the submerged
arc process - Part 1. Welding J. (AWS), 286s 294s.
Gridharan PK, Murugan N (2007), Optimization of
pulsed welding process parameters for the welding of AISI 304 L stainless steel sheets. Int. J. of
Advanced Manufacturing Technology DOI
10.1.1007/S00170 - 008 - 1373 - 0.
Konkol PJ, Koons GF (1978), Optimization of parameters for two wire AC - ACSAW. Welding J.
(AWS), 27(12):367s-374s.
Menaka M, Vasudevan M, Venkataraman B, Baldev R
(2005), Estimating bead width and depth of penetration during welding by infrared thermal imaging.
Insight Non Destructive Test Condition
Monitoring 47:792-798.
Mostafa NB, Khajavi MN (2006) Optimization of
welding parameters for weld penetration in
FCAW. J. of Achievements in Materials and
Manufacturing Engineering 132-138.
Montgomery DC (2005), Design and analysis of
experiments. John Wiley and Sons, New York.
Montgomery DC, Peck EF (2005), Introduction to linear regression analysis. John Wiley and Sons,
New York.
Samati Z (1986), Automatic pulsed MIG welding.
Metal Construction 38R-44 R.
Shyu SW, Haung HY, Tseng CCP (2008), Study of the
performance of stainless steel A - TIG welds. J. of
Material Processing Engineering 17: 193-201.
Siva K, Murugan N, Raghupathy VP (2009),
Modeling, analysis and optimization of weld bead
parameters of nickel based overlay deposited by
plasma transferred arc surfacing. Computational
Material Science and Engineering 1:174-182.
Systat, Version 11, Systat Inc., San Jose, CA.
Tarang YS, Yang WH (1998), Optimization of weld
bead geometry in GTAW by taguchi method. Int.
J. for Advanced Manufacturing Technology 14:
549-554.
Thao DS, Kim IS (2009), Interaction model for predicting bead geometry for lab joint in GMA welding process. Computational Material Science and
Surface Engineering 1:237-244.
Yang IJ, Bibby MJ, Chandel RS (1993), Linear regression equations for modeling the submerged arc
welding process. J. of Material Processing
Technology 39:33-42.