physics of the vibration isolation stack
advertisement

Vibration isolation analysis for a scanning tunneling
microscope
A. I. Oliva, Victor Sosa, R. de Coss, Raquel Sosa, N. L6pez Salazar, and J. L. Peila
Centro de Investigacicin y Estudios Avanzados de1 IPN, Unidad Mbrida, Departamento de Fisica Aplicada,
Apdo. Postal 73-Cordemex.. 973 IO, Mhrida, Yucatcin, Mhico
(Received 7 October 1991; accepted for publication
11 February 1992)
We analyze the efficiency of a vibration isolation system (VIS) for a scanning tunneling
microscope as a function of the different parameters involved. The VIS consists of a stack of
several metallic plates, separated by rubber elements with known properties. We show
three-dimensional graphs obtained for different values of parameters such as rigidity (spring)
constant (K), damping constant (C), mass (M), and the number of stages (n). Analyzing the
K dependence of the position of the main peaks, we find a parabolic behavior when the damping
constant is small, with a slight deviation for larger values.
I. INTRODUCTION
The scanning tunneling microscope (STM) was invented by Binnig and Rohrer.’ For this work they were
awarded the Nobel Prize for Physics in 1986.2 Since then,
the STM has been used to obtain surface topography with
atomic resolution and electronic properties of metals and
other materials. It can be used in vacuum or under atmospheric pressure and actually it has become a necessary
tool in research laboratories because it is possible to perform nondestructive surface analysis.
The principle of operation of a STM is based on maintaining a tunneling current in the gap formed between a
sample and a sharpened metallic tip, when they are very
closely spaced (several angstroms apart). If this current is
controlled by means of an electronic feedback circuit, and
the sample surface is scanned by means of piezoelectric
elements, one can obtain the topography of the surface
and/or some electronic properties.
To achieve atomic resolution, the STM must be provided with a system capable of reducing the external perturbations in order to obtain good stability in the tunnel
junction. Some authors suggest l-pm (10 - l2 m) resolution needed to detect the corrugation of the atomic surface
in metals.3’4 If the resolution is higher, it is possible to
detect, at low temperatures, molecular vibrational motion
and phonons both in the tip an,d the sample.5*6
Different STM designs have used different methods for
vibration isolation. These methods have been modified
with time to obtain better results. Examples are the first
STM of Binnig and Rohrer’ using superconducting magnetic levitation at liquid-helium temperature; the use of
helical springs in two or three stages, damped with eddy
currents; and recently, the use of viton elements between
metallic plates to form a stack. The tunnel junction is fabricated over the stack. The use of the last method has made
it possible to design a more simple and compact STM with
equal or higher performance. Several STM8lo
with
atomic resolution have been constructed with this kind of
vibration isolation method.
Okano et a1.,3 and recently Hammiche er al.,” presented a theoretical model to describe the vibration isolation system (VIS) for a STM for a simple geometry based
on a number of stages separated by rubber elements with
3326
Rev. Sci. Instrum.
63 (6), June 1992
known properties, with one-dimensional motion. However,
they did not analyze the behavior for different values of the
relevant parameters, to obtain better results in the VIS.
In this work we present a study, based on Okano’s
model, of the influence of the different parameters involved
in the VIS, namely, the mass (M), the number of stacks
(n), the rigidity constant (K), and the damping constant
( C), in order to recommend the best conditions to achieve
good results.
Some authors”3*‘2 recommend that the ratio between
the natural frequency of the system and the frequency of
the external perturbation be greater than at least two orders of magnitude in order to avoid resonance effects.
II. THEORY
Okano’s model is based on the effect caused by the
external vibrations on the tunnel junction located on the
last stage of a one-dimensional system. To define some
concepts, we first assume that the VIS consists of a simple
mass-spring system of two stages. In this case, the equations of motion for the two coupled oscillators are:
mlBl + KIXl -I- K2(X1 - X2) = KIXb sin wt,
..
m2X,+K2W2--X,)
=o,
(1)
(2)
where w is the angular frequency of the external perturbation and Mi and Ki are the mass and the rigidity constants
of every stage, respectively, and Xb the amplitude of the
external perturbation.
The global transfer function of the complete system is
dB = 20 log(xZ - xl)/xb
(3)
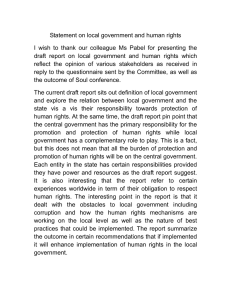
We assume that the VIS consists of n stages with only
one degree of freedom (Fig. 1) and Ci and Ki have known
values for every stage. Drawing the free-body diagram for
every mass, applying Newton’s second law, and assuming
an external perturbation Y. ejwc and oscillations Xi ej”‘, we
obtain the following equations. For mass one,
- w2M,X, +jwC,Xl + K,Xl + f&(X' -X2)
+jwC*M
0034-6746/92/063326-04!$02.00
-X,)
= Fl,
@II1992 American
(4)
Institute
of Physics
3326
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
FIG. 1. Diagram of the vibration isolation system (VIS) of n stages
analyzed in this work. The system consists of a stack formed by plates and
rubbers with a one-dimensional motion.
Frequency
(Hz)
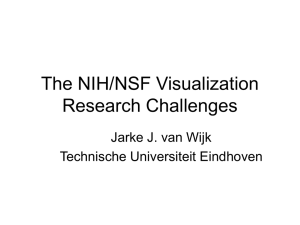
FIG. 2. VIS response for four, six, and eight stages. M = 0.03 kg, K
= 80,OCHlN/m, and C = 5 Ns/m for each stage.
where F, = (K, + @C, ) Ye. For mass r,
- w2MJ,
+ jwC,(X,
- x, - , ) + K,(X,
- x,-
,)
Our principal aim was to find optimal values of the
parameters K, C, M, and n in a VIS to give the best con-
ditions for reaching the 10 - 12-m vibration amplitude necessary in the tunnel junction.
If we try to solve the problem analytically and thus to
obtain the optimum values, it is very complicated when the
number of stacks is higher than two. This problem has
widely been analyzed and demonstrated in previous
work’3+‘4 for two stages. In that theoretical model we
found an expression for a transfer function with two parts:
a real part and an imaginary part. The real part is strongly
influenced by the rigidity constant K and depends inversely
on the square of frequency. In the real part of the behavior
of the resonance peaks is similar to a spring-mass system.
The imaginary part depends strongly on the damping constant and the variation with frequency is more smooth. The
imaginary part determines the amplitudes of the resonance
peaks.
However, our interest is a combination of both parts,
because in a real problem, both are joined. Also, the mass
M, involved in both parts, is another important parameter
and its value depends on the necessities and the available
space. The current tendency is to design compact STMs.
To solve the equations [(4)-(7)]
presented before, we
developed a FORTRAN program to calculate the effect of
every parameter on the last stage of the STM. We make
graphs for a wide range of the VIS parameters. With these
graphs we studied the efficiency and the behavior of the
VIS. In the next paragraphs we present a discussion of the
results obtained from the analysis.
One must choose the number of stages needed for the
VIS, the required vibration isolation, and the expected external perturbations. We assume, for all calculations, a
10e6-m external perturbation and a lo-I*-m vibration amplitude desirable in the last stage. This implies that we need
a transfer function which reduces the amplitude by 10e6
times or 120 db.
In Fig. 2 we show the transfer function for a VIS with
four, six, and eight stages. We use M = 0.03 kg,
K = 8.1 X lo4 N/m, and C = 5 Ns/m for every stage. The
curve for 4 stages has the main peak at a frequency of 100
Hz and it is possible to reduce the external perturbation by
3327
STM vibration
+JG+,(~,-X,+1)
+K+l(X,--X,+,)
=o
(5)
where r = 2,3 ,... n - 1, and for the nth mass,
-u~2~,~,,+jwcn(x,--x,-,)
+K,(X,-xX,-1)
=o.
(6)
The transfer function between the last stage and the
external perturbation for this system is given by
dB = 20 log(X,,/YO)
or,
dB = 20 log{[Re(X,,)2
+ Im(X,)2]“2/Yo}.
(7)
We solved the problem varying the values of different parameters (K and C) for the rubber elements used in the
VI.5 These values can be determined using experimental
methods.
There exist different kinds of rubber materials used
between each stage, but viton is the most widely used in
vacuum conditions. To analyze the behavior of the VIS we
need to know properties like K and C. Both values depend
on the size, the geometry, and the material type. We measured K and C for a toroidal viton rubber. The rigidity
constant K was determined using the equation K = F/6
(Hooke’s law), where F is an applied force and S the corresponding deformation. To measure the damping constant
C, we used the equation obtained from a critical damping
analysis, given by C = ( - 2M/t) ln(X/X,),
where M is
the mass, X the deformation during time t, and X0 the
initial deformation. Average values obtained for toroidal
vitons (3.6-mm external diameter, and 1.3-mm-diam cross
sectional) are K = 8.12X lo4 N/m and C = 3.5 Ns/m. All
the experiments were done with 12 N as the maximum
applied load.
Ill. DISCUSSION
Rev. Sci. Instrum.,
Vol. 63, No. 6, June 1992
isolation
3327
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
60
86
II
4
Frequency
(Hz)
FIG. 3. Same as Fig. 2, but using A4 = 0.3 kg in every stage.
only four orders of magnitude ( -- 80 dB) approximately at
about 1 X lo3 Hz. With these characteristics it is not possible to reach our desired value ( - 120 dB). But if we
increase the number of stages, we can reach this goal. In
the same Fig. 2, with eight stages we obtained - 120 dB at
700 Hz. From this analysis we c.an determine an adequate
number of stages, depending on the space, cost, and perturbation level.
Mass is another important parameter for VIS in a
STM. By experience, we know that if we increase the mass,
the VIS will work better. Figure 3 is similar to Fig. 2 but it
was obtained with a mass ten tilmes higher (0.3 kg). The
other parameters remain the same. In Fig. 3 we can observe, for the same number of stages, the lower values in
frequency reached for higher mass. Some authors’2*15 mention the use of high mass values in the VIS for the STM
with excellent results.
In order to study the effect of the constants K and C,
we present three-dimensional graphs using six stages, each
with M = 0.03 kg. In Fig. 4(a), a three-dimensional graph
was calculated for C = I Ns/m. K values ranged from 1 to
lo5 N/m. The scale of K in the graph is divided in two
parts to show all the range. The frequency was varied from
1 to lo3 Hz. From Fig. 4(a) we can see how the main peak
(at the lowest resonant frequency) drifts slightly to higher
values as K is increased. Also, at a 103-Hz frequency the
transfer function decreased when the K value is increased.
This same effect can be seen better in Fig. 4(b) where
we used C = 10 Ns/m. Note that the surface behaves more
smoothly for small K values. The main peak appears when
K has high values and the other peaks practically disappear
due to the effect of the damping constant. If we increase the
C value to 100 Ns/m, as we can see in Fig. 4(c), the effect
is more pronounced. The transfer function increased at
1 x lo3 Hz and the main peak is weak. If we compare the
last three graphs for a fixed frequency we observe that
when C increases, the transfer function increases also.
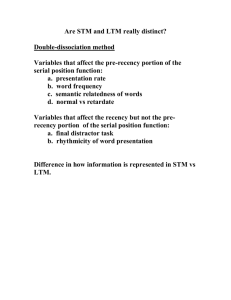
Regarding the behavior of the position of the main
peaks (frequency f,)
in Figs. 4(a), 4(b), and 4(c), we
can plot log(271-fM) as a function of K. This graph is presented in Fig. 5. Three lines are shown for different condi3328
Rev. Sci. Instrum.,
Vol. 63, No. 6, June 1992
(a)
(b)
FIG. 4. Three-dimensional graphs of the transfer function in a six-stage
VIS. K ranges from l-l x lo5 N/m and its scale is divided in two parts to
represent the whole range. The parameter values used for every stage were
the same as in Fig. 2 except the C value. (a) C= 1 Ns/m; (b) C= IO
Ns/m, and (c) C= 100 Ns/m
tions. Lines I, II, and III correspond to the main peaks for
the C= 1 Ns/m, C = 10 Ns/m, and C= 100 Ns/m
graphs, respectively. Applying a linear regression in each
line we found the following results:
STM vibration
isolation
3328
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
1.8~
, .6.---
..--
1.4
1.2
1
0.8
0.8
0.4
0.2
J
1 t!+Ol
lE+03
lE+02
1 E+04
1 E+05
-2004 G - 8 - 8 n 8 n g 1 5 1 ) G - s ’ 8 3
0
200
400
600
800
1000
K (N/m)
Frequency
FIG. 5. Main peak position (fv) of the Figs. 4(a)-4(c) as a function of
K. The symbols represent the position of every peak and the solid lines
result from linear regressions.
Line I (C = 1 Ns/m):
fM = 0.0350K0.500
Line II (C=
fLw = 0.0264K0.529
Line III
10 Ns/m:
(C = 100 Ns/m):
fAv = 0.0069K0.647,
(8)
The slope of line I corresponds to a simple mass-spring
system. Assuming this approximation, we can calculate
the natural frequency by the equation fiM = (1/2a)
(K/M) I’*. In this way, we can find an equivalent mass of
the complete system. For line I, we find an equivalent mass
of 0.52 kg.
Equations obtained from lines II and III show a slight
deviation in the slope. This deviation is due to the effect of
the damping constant C.
With real data obtained from our materials, we simulated a VIS using the graphical model presented. Figure 6
shows the curve obtained. For this calculation we used a
stack of six stages with 5 equal masses of 0.026 kg, the
sixth mass of 0.636 kg, K = 81 200 N/m, and C = 3.5 Ns/
m. The last heavy mass includes the tunnel junction. From
the graph, we can see the behavior of the three last stages
of the system and the way that the transfer function improves with the high number of stages. From the graph we
see that the desired amplitude (lo-‘* m) is reached at 800
Hz in the last stage. Then, the resonant mechanical frequency of the STM needs to be 8 kHz, to assure that the
tunnel junction will reduce the external perturbations in
order to achieve atomic resolution.
In summary, we obtained a graphical method for vibration isolation analysis where we showed the effect of
every parameter involved. This method is useful for STM
mechanical design. By means of three-dimensional graphs,
we have shown the behavior of the transfer function with
frequency for a wide range of the rigidity constant K. We
3329
Rev. Sci. Instrum.,
Vol. 63, No. 6, June 1992
(Hz)
FIG. 6. Transfer function obtained with real data for a STM currently
under construction. We use 6 stages with five equal masses (0.026 kg)
and the sixth mass is different (0.636 kg). K = 81,200 N/m, and C = 3.5
Ns/m were used for every stage. Responses of the fourth and fifth stages
are also shown, to clarify the evolution of damping.
find a mass-spring behavior for small values of C with a
slight variation when the damping constant is increased.
We show using real data the frequency needed to reach the
required - 120 dB in the tunnel junction of the STM.
ACKNOWLEDGMENTS
The authors are very grateful for the support given by
CONACyT and COSNET-SEP, Mexico. We also thank
Dr. Brian Davies for his technical review of the manuscript.
‘G. Binnig and H. Rohrer, Heiv. Phys. Acta 55, 726 ( 1982).
*G. Binnig and H. Rohrer, Lex Pris Nobel en 1986 (The Nobel Foundations), p. 85.
3M. Okano, K. Kajimura, S. Wakiyama, F. Sakai, W. Mizutani, and M.
Ono, J. Vat. Sci. Technol. A 5, 3313 ( 1987).
4D. W. Pohi, IBM J. Res. Dev. 30, 417 (1986).
5D. P. E. Smith, M. D. Kirk, and C. F. Quate, J. Chem. Phys. 86, 6034
(1987).
6D. P. E. Smith, G. Binnig, and C. F. Quate, Phys. Rev. Lett. 49, 1641
(1986).
‘G. Binnig and H. Rohrer, Sci. Am. 253 (2) (1985).
sG. Gerber, G. Binnig, H. Fuchs, 0. Marti, and H. Rohrer, Rev. Sci.
Instrum. 57, 221 (1986).
‘M. P. Cox and P. R. Griffin, J. Vat. Sci. Technoi. A 6, 376 (1988).
“Commercial STM, W. A. Technology LTD, Chesterton Mills, French’s
Road, Cambridge CB4 3NP, England.
“A. Hammiche, Yu Wei, I. H. Wilson, and R. P. Webb, Rev. Sci. Instrum. 62, 3010 (1991).
‘*R. Sonnenfeid , J . Schneir, and P. K. Hansma, Modern Electrochemistry,
No. 21, edited by E. Ralph, J. White, O’M Brockris, and B. E. Conway
(Plenum. New York, 1990).
“A. I. Oliva, Victor Sosa, Romeo De Coss, N. Lopez Saiazar, Raquel
Sosa, and J. L. Peiia, Rev. Mex. Fis. (In press).
14Park Sang-ii and C. F. Quate, Rev. Sci. Instrum. 58, 11 ( 1987).
“5. Tersoff and P. K. Hansma, Phys. Rev. B 31, 805 (1985).
STM vibration
isolation
3329
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp