Statistical and Transform Methods for Seismic Signal Processing
advertisement

Statistical and Transform Methods
for Seismic Signal Processing
M. D. Sacchi
Department of Physics
University of Alberta
M.D.Sacchi / STMSSP
1
Contact:
Dr M.D.Sacchi
Department of Physics,
University of Alberta,
Edmonton, Canada, AB, T6G 2J1
Sacchi@phys.ualberta.ca
www-geo.phys.ualberta.ca/~ sacchi
M.D.Sacchi / STMSSP
2
1
Review of basic tools
M.D.Sacchi / STMSSP
3
1.1
Fourier Series
Let us assume that we want to approximate a function
f (t) by a superposition of n orthogonal functions:
f (t) ≈
N
X
ci φi (t)
i=1
Z t2
t1
φi (t)φj (t) dt = δij
The coefficients ci , i = 1 . . . N can be obtained by
minimizing the means square error defined as:
N
X
1 Z t2
(f (t) −
φi (t))2 dt
M SE =
t 2 − t 1 t1
i=1
ci =
M.D.Sacchi / STMSSP
R t2
t1
f (t)φi (t) dt
.
2 dt
φ(t)
t1
R t2
4
Consider the orthogonal set given by
ejnω0 t ,
n = 0, ±1, ±2, ±3, . . .
this set is orthogonal in t ∈ [t0 , t0 +
2π
].
ω0
When a signal is expanded in terms of exponential we
have a Fourier series:
f (t) =
∞
X
Fn ejnω0 t
n=−∞
2π Z t0 +2π/ω0
f (t)e−jnω0 t dt
Fn =
ω 0 t0
Remark: Line Spectrum
M.D.Sacchi / STMSSP
5
1.2
Fourier Transform
F (ω) =
Z ∞
−∞
f (t)e−jωt dt
1 Z∞
f (t) =
F (ω)ejωt dω .
2π −∞
F (ω) = |F (ω)|ejθ(ω)
Remark: Continuous spectrum
M.D.Sacchi / STMSSP
6
1.3
Properties of the FT
We define the transform pair as:
f (t) ↔ F (ω)
Symmetry.
F (t) ↔ 2πf (−ω)
Linearity.
f1 (t) ↔ F1 (ω)
f2 (t) ↔ F2 (ω)
f1 (t) + f2 (t) ↔ F1 (ω) + F2 (ω)
Scale.
f (at) ↔
M.D.Sacchi / STMSSP
1
ω
F( )
|a| a
7
Convolution. If
f1 (t) ↔ F1 (ω)
f2 (t) ↔ F2 (ω)
Z ∞
−∞
f1 (u)f2 (t − u)du ↔ F1 (ω)F2 (ω)
Convolution in frequency.
1 Z∞
f1 (t).f2 (t) ↔
F1 (v)F2 (ω − v)dv
2π −∞
Time delay.
f (t − τ ) ↔ F (ω)e−jωt0
Modulation.
f (t)ejω0 t ↔ F (ω − ω0 )
Time derivatives.
df (t)
↔ jωF (ω)
dt
M.D.Sacchi / STMSSP
8
1.4
The FT of some signals
A Boxcar
f (t) =
1
|t| < T /2
0
otherwise
R T /2
F (ω) =
=
−T /2
1.e−jωt dt
1
(e−jωT /2
−jω
=
− ejωT /2 )
T sinc(ωT /2)
Boxcar T=10 sec
1.5
f (t)
1
T
0.5
0
−0.5
−80
−∞ ....
.... +∞
−60
−40
−20
0
time [sec]
20
40
60
80
10
8
4
T
F (ω)
6
2
0
−∞ ....
.... +∞
−2
−10
−8
−6
−4
−2
0
ω [rad/sec]
2
4
6
8
10
Figure 1: Boxcar.
M.D.Sacchi / STMSSP
9
Delta function:
f (t) = δ(t)
Z
g(u)δ(u)du = g(0)
F (w) =
Z ∞
−∞
δ(t)e−jωt dt = 1
δ(t) ↔ 1
δ(t − τ ) ↔ 1.e−jωτ
A complex sinusoid:
δ(t − τ ) ↔ 1.e−jωτ
F (t) ↔ 2πf (−ω)
ejω0 t ↔ 2πδ(ω − ω0 )
M.D.Sacchi / STMSSP
10
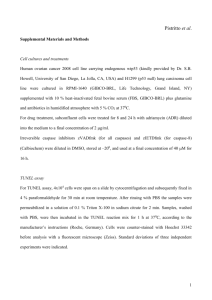
1.5
Truncation in time
Given f (t) t ∈ (−∞, ∞), with f (t) ↔ F (ω), how do we
obtain the FT of the signal when the signal is recorded in
a finite interval [−T /2, T /2]?.
fT (t) = f (t).bT (t)
Using the frequency convolution theorem:
1 Z∞
1
FT (ω) =
F (v)BT (ω − v)dv =
F (ω) ∗ BT (ω)
2π −∞
2π
BT (ω) = T sinc(ωT /2)
.
Signal observed in [−10,10]
Real[f(t)]
1
0
−1
−80
−60
−40
−20
0
time [sec]
20
40
60
80
−60
−40
−20
0
time [sec]
20
40
60
80
−3
−2
−1
0
ω [rad/sec]
1
2
3
4
Imag[f(t)]
1
0
−1
−80
|F(ω)|
30
20
10
0
−4
Figure 2: Truncation in time.
M.D.Sacchi / STMSSP
11
1.6
Symmetries
If the signal f (t) is a real signal, we can write:
F (ω) = R(ω) + iG(ω)
where
R(ω) =
Z
f (t)cos(ωt)dt and G(ω) = −
Z
f (t)sin(ωt)dt
R(ω) = R(−ω)
G(ω) = −G(−ω)
Amplitude and Phase:
F (ω) = |F (ω)|eiθ(ω) .
|F (ω)| = |F (−ω)|
θ(ω) = −θ(−ω) .
M.D.Sacchi / STMSSP
12
1.7
Living in a discrete World
fs (t) = f (t)
∞
X
δ(t − k∆t) .
k=−∞
∞
X
1
F (ω) ∗ ω0
Fs (ω) =
δ(ω − kω0 ) ,
2π
k=−∞
ω0 =
2π
∆T
∞
1 X
Fs (ω) =
F (ω − nω0 )
T k=−∞
If one wants to compute Fs (ω) in such a way that F (ω)
can be completely recovered, the signal f (t) must be a
band-limited signal. This is a signal where the spectral
components outside the interval [−ωmax , ωmax ] are zero. If
the following condition is satisfied
ω0 ≥ 2ωmax
1
2π
≥ 2 × 2πfmax then, ∆T ≤
.
∆T
2fmax
The last equation is also designated as the sampling or
Nyquist Theorem.
M.D.Sacchi / STMSSP
13
Fourier transform of the continuous signal
1
0.8
F(ω)
0.6
ω
max
= 10 rad/sec
0.4
0.2
0
−100
−80
−60
−40
−20
0
20
Frequency ω (rad/sec)
40
60
80
100
Figure 3: The Fourier transform of a continuous signal.
Fourier transform of the discretized signal
4.5
4
3.5
2.5
s
F (ω)
3
2
..... ∞
−∞ .....
1.5
1
ω0 = 30 rad/sec
ωmax = 10 rad/sec
0.5
∆ t = 0.2094 sec
0
−100
−80
−60
−40
−20
0
20
Frequency ω (rad/sec)
40
60
80
100
Figure 4: The Fourier transform the continuous signal after
being discretized, in this case ωmax = 10 and ω0 = 30
M.D.Sacchi / STMSSP
14
Fourier transform of the discretized signal
3
2.5
..... ∞
−∞ .....
s
F (ω)
2
1.5
1
ω0 = 20 rad/sec
ωmax = 10 rad/sec
0.5
∆ t = 0.3142 sec
0
−100
−80
−60
−40
−20
0
20
Frequency ω (rad/sec)
40
60
80
100
Figure 5:
The Fourier transform the continuous signal after being discretized,
in this case ωmax = 10 and ω0 = 20. The Fourier transform of the continuous
signal is perfectly represented in the interval [−wmax , wmax ].
Fourier transform of the discretized signal
2
..... ∞
−∞ .....
s
F (ω)
1.5
1
ω
0
= 15 rad/sec
ωmax = 10 rad/sec
0.5
∆ t = 0.4189 sec
0
−100
−80
−60
−40
−20
0
20
Frequency ω (rad/sec)
40
60
80
100
Figure 6:
The Fourier transform the continuous signal after being discretized,
in this case ωmax = 10 and ω0 = 15. The signal is aliased. Note that Nyquist
theorem is not satisfied. The Fourier transform of the continuous signal cannot
be recovered from the Fourier transform of the sampled signal.
M.D.Sacchi / STMSSP
15
2
Linearity, z-Transform and
Convolution
M.D.Sacchi / STMSSP
16
2.1
Linear Systems
Input/output analysis of a linear system
x(t) → y(t)
If the system is linear the following properties must be
satisfied:
P1 :
αx(t) → αy(t) .
P2: If
x1 (t) → y1 (t)
x2 (t) → y2 (t)
then
x1 (t) + x2 (t) → y1 (t) + y2 (t) .
P3: Properties P1 and P2 can be combined in a single
property:
αx1 (t) + βx2 (t) → αy1 (t) + βy2 (t) .
M.D.Sacchi / STMSSP
17
2.2
Time Invariant Systems
Time invariance means:
x(t − T ) → y(t − T )
We will represent our linear system as follows:
H[x(t)] = y(t) .
(1)
General expression for a linear system
y(t) = H[x(t)] =
Z ∞
−∞
h(t, τ )x(τ )dτ .
(2)
If the system is also time invariant
y(t − T ) = H[(x(t − T )] .
y(t) =
Z ∞
−∞
h(t − τ )x(τ )dτ
(3)
(4)
In the freq. domain:
Y (ω) = H(ω) .X(ω) .
M.D.Sacchi / STMSSP
18
Time Invariant Linear System
x(t)
h (t)
y(t)
δ (t)
h (t)
h(t)
x(t) : Input,
y(t): Output,
h(t): Impulse response
Figure 7: A continuous linear time invariant system.
Time Invariant Linear System (discrete case)
x0,x1,x2,x3,...
h0,h1,h2,h3,....
y0,y1,y2,y3,...
1,0,0,0,0,...
h0,h1,h2,h3,....
h0,h1,h2,h3,....
x : Input,
y: Output,
h: Impulse response
Figure 8: A discrete time invariant linear system.
M.D.Sacchi / STMSSP
19
2.3
Discrete Convolution
If the system is discrete, this is a system where the input
and output signals are discrete signals, the convolution
integral becomes a summation:
yk =
∞
X
hn xk−n
(5)
n=−∞
Finite length signal:
xn , n = 0 : N X − 1 is a signal of length N X
yn , n = 0 : N Y − 1 is a signal of length N Y
hn , n = 0 : N H − 1 is a signal of length N H
yk =
p2
X
hk−n xn ,
(6)
n=p1
where p1 and p2 indicate the finite summation limits.
Smart Conv:
y(1:NX+NH-1) = 0
for i=1:NX
for j=1:NH
y(i+j-1) = y(i+j-1) + x(i)*h(j)
end
end
M.D.Sacchi / STMSSP
20
Assuming that x = [x0 , x1 , x2 , x3 , x4 ] and h = [h0 , h1 , h2 ],
and after carrying out the convolution sum (Eq.6):
y0 = x 0 h 0
y1 = x1 h0 +x0 h1
y2 = x2 h0 +x1 h1 +x0 h2
y3 = x3 h0 +x2 h1 +x1 h2
y4 = x4 h0 +x3 h1 +x2 h2
y5 =
x 4 h1
y6 =
+x3 h2
x 5 h2
or
M.D.Sacchi / STMSSP
y0
y1
y2
y3
y4
y5
y6
=
x0
0
x1 x0
0
0
x2 x1 x0
x3 x2 x1
x4 x3 x2
0
x 4 x3
0
0
x4
h0
h1
h2
21
2.4
The z transform
A digital signal:
x0 , x 1 , x 2 , x 3 , . . .
can be represented using the Z-transform:
X(z) =
∞
X
xn z n
k=0
For a finite length time series xk , k = 0, . . . , N − 1 we write
X(z) =
N
−1
X
xn z n
k=0
Example 1:
x = 4, 12, −1, 3 ,
↑
X(z) = 4 + 12z − 1z 2 + 3z 3 .
Example 2:
x = −1, 3, 4, 3, 5, 6, −10
↑
X(z) = −z −3 + 3z −2 + 4z −1 + 3 + 5z + 6z 2 − 10z 3 .
M.D.Sacchi / STMSSP
22
2.5
Convolution and the Z-transform
We have two times series, x = [x0 , x1 , x2 , x3 , x4 ] and
h = [h0 , h1 , h2 ]. The Z-transforms of these series are:
X(z) = x0 + x1 z + x2 z 2 + x3 z 3 + x4 z 4
H(z) = h0 + h1 z + x2 z 2
Now, let us compute the product of the above
polynomials:
X(z).H(z) = x0 h0 +
(x1 h0 + x0 h1 )z +
(x2 h0 + x1 h1 + x0 h2 )z 2 +
(x3 h0 + x2 h1 + x1 h2 )z 3 +
(x4 h0 + x3 h1 + x2 h2 )z 4 +
(x4 h1 + x3 h2 )z 5 +
(x5 h2 )z 6
One can see that the coefficient of this new polynomial are
the samples of the time series y = [y0 , y1 , . . . , y6 ] obtained
by the convolution of x and h, in other words, X(z) .H(z)
is the also the Z-transform of the time series y:
Y (z) = X(z) .H(z) .
M.D.Sacchi / STMSSP
23
2.6
Elementary Signals: Dipoles
Minimum Phase Dipoles
A simple manner of visualizing the properties of a time
series in the z domain is by decomposing the Z-transform
into dipoles or elemental function of the type
1 + az
As an example, we compute the Z-transform of the series
x = [4, 12, −1, 3]:
1
1
X(z) = 4 + 12z − 1z 2 + 3z 3 = 4(1 + z)(1 − z)(1 + 3z) .
2
2
We have already seen that two multiply the Z-transform
of two time series is equivalent to convolve the time series
in the time domain,
1
1
4, 12, −1, 3 = 4[ (1, ) ⊗ (1, − ) ⊗ (1, 3z)] .
2
2
M.D.Sacchi / STMSSP
24
Inversion of Minimum Phase Dipoles
Let us assume that the dipole, which I will call D(z), is
given by
D(z) = 1 + az .
The inverse of the dipole F (z) must satisfy
F (z)D(z) = 1 then, F (z) =
1
1
=
,
D(z)
1 + az
if |a| < 1 the denominator can be expanded according to
the following expression a :
F (z) = 1 − az + (az)2 − (az)3 + (az)4 . . .
Since |a| < 1 the above series is a convergent series. F (z)
is the z transform of the following series
1, −a, a2 , −a3 , a4 , . . .
↑
The convolution of the dipole with the filter yields
a
(1, a) ⊗ (1, −a, a2 , −a3 , a4 , . . .) = 1, 0, 0, 0, 0, 0, . . .
↑
↑
↑
A geometric series.
M.D.Sacchi / STMSSP
25
Let us compute the inverse of the following dipoles:
(1, 0.9) and (1, 0.01).
Example: (1, 0.9)
F (z) =
1
= 1−0.9z+0.81z 2 −0.729z 3 +0.6561z 4 . . . .
1 + 0.9z
(1, 0.9)⊗(1, −0.9, 0.81, −0.729, 0.6561) = (1, 0.0, 0.0, 0.0, 0.59)
Example: (1, 0.01)
F (z) =
1
= 1−0.1z+0.01z 2 −0.001z 3 +0.0001z 4 . . . .
1 + 0.1z
(1, 0.1)⊗(1, −0.1, 0.01, −0.001, 0.0001) = (1, 0.0, 0.0, 0.0, 0.0) .
It is clear that the truncation is negligible when a = 0.1.
This is not true when a ≈ 1. In this case a long filer is
needed to properly invert the dipole.
M.D.Sacchi / STMSSP
26
Dipole, d = (1,0.9)
Truncated inverse filter, f
Output, d ⊗ f
Dipole, d = (1,0.5)
Truncated inverse filter, f
Output, d ⊗ f
Dipole, d = (1,0.1)
Truncated inverse filter, f
Output, d ⊗ f
M.D.Sacchi / STMSSP
27
Minimum Phase Signals
A signal can be factorized in dipoles
X(z) = x0 +x1 z+x2 z 2 +x3 z 3 . . . = A(1+a1 z)(1+a2 z)(1+a3 z) . . . .
If |ai | < 1, ∀i, the signal is a minimum phase signal. In
this case all the zeros lie outside the unit circle
X(ξ) = 0 ⇒ ξi = −
1
⇒ |ai | < 1 ⇒ |ξi | > 1 .
ai
The inverse filter F (z) of X(z) can be calculated from
X(z)F (z) = 1
(1 + a1 z)(1 + a2 z)(1 + a3 z) . . . . F (z) = 1 .
From the above equation where we can write
F (z) = (1 + a1 z)−1 (1 + a2 z)−1 (1 + a3 z)−1 . . .
= [(1 − a1 z + (a1 z)2 − (a1 z)3 . . .][(1 − a2 z + (a2 z)2 − (a2 z)3 . . .]
[(1 − a3 z + (a3 z)2 − (a3 z)3 . . .] . . . .
The final inverse operator can be written as
f0 , f1 , f2 , . . . = (1, −a1 , a21 , a31 . . .)⊗(1, −a2 , a22 , −a32 . . .)⊗. . . . . .
M.D.Sacchi / STMSSP
28
Maximum Phase Dipoles
Elementary signals of the form (1, b), |b| > 1 are called
maximum phase dipoles
D(z) = 1 + bz ⇒ D(ξ) = 1 + bξ = 0 ⇒ ξ = −1/b .
Since |b| < 1, it is easy to see that |ξ| < 1. The inverse of
a maximum phase dipole is a non-causal sequence.
F (z)D(z) = 1 ⇒ F (z) =
1
1
=
D(z)
1 + bz
If last equation is expanded in a series of positive powers
of z we have
1
= 1 − bz + (bz)2 − (bz)3 . . .
1 + bz
The last series does not converge. Try this
F (z) =
1
1
=
1 + bz
bz(1 + (bz)−1 )
F (z) = (bz)−1 (1 − (bz)−1 + (bz)−1 − (bz)−3 . . .) .
Now the inverse is stable but non-causal, the associated
operator is given by f = . . . , −b−3 , b−2 , −b−1 , 0
↑
M.D.Sacchi / STMSSP
29
Example, (1, 2)
f = (−0.0156, 0.0312, −0.0625, 0.125, −0.25, 0.5, 0 )
↑
Convolution of f with the maximum phase dipole:
d ⊗ f = (−0.0156, 0.0312, −0.0625, 0.125, −0.25, 0.5, 0 ) ⊗ (1, 2)
↑
↑
= (−0.0156, 0, 0, 0, 0, 0, 1, 0)
↑
Dipole, d = (1,2)
0
Truncated inverse filter (non−casual) , f
0
Output, d ⊗ f
0
Figure 9: Maximum phase dipole, its non-causal truncated
inverse, f , and the output d ⊗ f .
M.D.Sacchi / STMSSP
30
Autocorrelation of Dipoles
The autoccorelation function of a sequence with
z-transform X(z) is defined as
R(z) = X(z)X ∗ (z −1 )
We will consider two dipoles of the form:
Dmin (z) = 1 + az Min Phase
Dmax (z) = a∗ + z Max Phase
Autocorrelations
Rmin (z) = a∗ z −1 + (1 + |a|2 ) + a z ,
Rmax (z) = a∗ z −1 + (1 + |a|2 ) + a z .
The two dipoles have the same autocorrelation function!!
Rmax (z) = Rmin (z) = R(z)
M.D.Sacchi / STMSSP
31
Amplitude and Phase of Dipoles
Minimum phase case
Dmin (z) = 1 + az ⇒ z = e−iω ⇒ Dmin (ω) = 1 + ae−iw .
Maximum phase case
Dmax (z) = a + z ⇒ z = e−iω ⇒ Dmax (ω) = a + 1e−iw
RDmin (ω) =
q
1 + 2a cos(ω) + a2
θmin (ω) = arctan(
RDmax (ω) =
q
a sin(ω)
)
1 + a cos(ω)
1 + 2a cos(ω) + a2
θmax (ω) = arctan(
M.D.Sacchi / STMSSP
sin(ω)
)
a + cos(ω)
32
Amplitude of 1+0.5z
Ampliture of 0.5+z)
1.3
1.3
1.2
1.2
1.1
1.1
1
1
0.9
0.9
0.8
0
50
100
150
0.8
0
Phase of 1+0.5z)
50
100
150
Phase of 0.5+z
0
0
−0.5
−0.05
−1
−0.1
−1.5
−0.15
−2
−2.5
−0.2
−0.25
−3
0
50
100
150
−3.5
0
50
100
150
Figure 10: Amplitude and phase spectrum of a minimum
phase dipole 1 + az and a maximum phase dipole a ∗ +z,
|a| < 1.
M.D.Sacchi / STMSSP
33
2.7
Least Squares Inversion of Minimum
Phase Dipoles
We have already solved:
D(z)F (z) = 1 .
The solution of last problem yields a filter with an infinity
number of coefficients (Not a good idea!).
Now, our task is to construct a finite length filter with the
following property
D(z)FN (z) ≈ 1 ,
where FN (z) denotes the z transform of the finite length
operator. The above equation can be written in the time
domain as follows (assuming N = 3),
(1, a) ⊗ (f0 , f1 , f2 ) ≈ (1, 0, 0, 0) .
↑
M.D.Sacchi / STMSSP
34
In matrix form
1
1 0 0
f0
0
a 1 0
.
f1
≈
0 a 1
0
f2
0
0 0 a
The last system of equations corresponds to an
over-determined system that can be solved using the
method of least squares
Cf ≈ b ,
the solution vector is the one that minimized the mean
squared error
² = ||C f − b||2 .
The least squares solution of this system is found by
solving the following system of normal equations
CT C f = C T b .
The resulting filter is
f = R−1 CT b ,
M.D.Sacchi / STMSSP
35
Examples:
Dipole, d = (1,0.9)
0
Output, d ⊗ f
Least squares inverse filter , f
0
0
Figure 11: Inversion of a minimum phase dipole using least
squares.
Dipole, d = (1,0.5)
0
Output, d ⊗ f
Least squares inverse filter , f
0
0
Figure 12: Inversion of a minimum phase dipole using least
squares.
M.D.Sacchi / STMSSP
36
2.8
Least Squares Inversion of a Wavelet
Given a signal (wavelet) w, we want to find f such that:
(w0 , w1 , . . . wN W −1 ) ⊗ (f0 , f1 , . . . , fN F −1 ) ≈ (1, 0, . . . , )
In matrix form we can write the following expression
(assuming N W = 7 and N F = 4)
w0
0
0
w1 w0
0
w2 w1 w0
0
0
0
w3 w2 w1 w0
w4 w3 w2 w1
w5 w4 w3 w2
w6 w5 w4 w3
0
w 6 w5 w4
0
0
0
0
M.D.Sacchi / STMSSP
w 6 w5
0
w6
f0
f1
f2
f3
≈
1
0
0
0
0
0
0
0
0
0
.
37
Again, this system is written in matrix form as Cf ≈ d.
We will compute the inverse filter by minimizing the error
function (mean squared error) ²:
² = ||e||2 = ||C f − b||2 ;
The Euclidean norm of the error vector e = C f − b can
be written down as
² = eT e = (C f − b)T (C f − b) .
The mean squared error is minimized when the following
condition if satisfied:
d²
= 0,
df
→
CT C f = C T b .
f = (CT C )−1 CT b .
M.D.Sacchi / STMSSP
38
2.9
Stability
Pre-whitening (zero order quadratic regularization):
J = ² + µ||f ||2 ,
The solution is now given by the penalized least squares
estimator where the parameter µ is also called the
regularization parameter ( ridge regression parameter or
pre-whitening parameter).
The condition
dJ
= 0,
df
→
f = (R + µI)−1 CT d .
When µ is large the energy of the filter will be small and
the misfit function ² will be large. In this case we have a
matching filter of the form
f = µ−1 CT d .
M.D.Sacchi / STMSSP
39
Trade-off curve
Output, w⊗f
Filter, f
µ=1.e6
µ=1.e−4
Figure 13: A minimum phase wavelet inverted using different tradeoff parameters (µ).
Tradeoff curve
1
µ=0.1
0.9
0.8
0.7
Misfit, ε
0.6
0.5
0.4
0.3
0.2
µ=100000.
0.1
0
0
0.1
0.2
0.3
0.4
2
Filter norm, ||f||
0.5
0.6
0.7
Figure 14: Trade-off curve for the previous example. The
vertical axis indicated the misfit and the horizontal the
norm of the filter.
M.D.Sacchi / STMSSP
40
2.10
The z transform and the Discrete
Fourier Transform (DFT)
We have already defined the Z-transform of a time series
as follows:
X(z) =
N
−1
X
xn z n .
n=0
The z-transform provides a representation of our time
series in terms of a polynomial. Let us introduce the
following definition:
z = e−iω
in this case the z-transform becomes the DFT:
X(ω) =
N
−1
X
xn e−iωn
n=0
We have mapped the Z-transform into the unit circle
(z = e−iω is a complex variable of unit magnitude and
phase given by ω). The phase ω is also the frequency
variable in units of radians.
M.D.Sacchi / STMSSP
41
The function X(ω) is discretized according to
ωk =
2π
k , k = 0, . . . , N − 1
N
Xk = X(ωk ) =
N
−1
X
xn e−iωk n
n=0
ω3
ω2
ω4=π
ω1
1ω0
ω5
ω7
ω6
1
2
3
ω0
ω1
ω2
7
6
4
5
6
7
8
ω3 ω4=π ω5 ω6 ω7
21
2
3
2π−ω5
ω0
2π−ω6
2π−ω7
ω1
ω2
8
4
5
ω3 ω4=π
Figure 15: Distribution of frequencies in the unit circle.
M.D.Sacchi / STMSSP
42
DFT in Matrix form:
X = F.x
F=
1
1
... 1
1 e−i2π/N
e−i2π2/N
...
e−i2π4/N
..
.
...
..
.
1
..
.
e−i2π2/N
..
.
e−i2π(N −1)/N
−i2π2(N −1)/N
e
..
.
2
1 e−i2π(N −1)/N e−i2π2(N −1)/N . . . e−i2π(N −1)
/N
It can be shown that F is an orthogonal matrix
FH F = N I N ,
→
x=
1 H
F X.
N
The IDFT (inverse DFT) is given by
−1
1 NX
xn =
Xk ei2πkn/N
N k=0
M.D.Sacchi / STMSSP
n = 0, . . . , N − 1 .
43
3
Deconvolution
M.D.Sacchi / STMSSP
44
3.1
Modeling Normal Incidence
Seismograms
• Incident wave: ↓ in medium 1
• Reflected wave: ↑ in medium 1
• Transmitted wave: ↓ in medium 2
1
r
I1
I2
t
r: reflection coefficient
t: transmition coefficient
1+r=t
Figure 16: P-wave normal incidence. The incident wave is
propagating downwards.
M.D.Sacchi / STMSSP
45
Let us assume that the amount of incident wave is equal
to 1, the amount of reflected wave is given by r, and the
amount of transmitted wave is denoted by t. At the
boundary the following condition should be satisfied
(continuity of displacements)
1+r =t
This equation has two unknowns, to compute the r and t
we need an extra equation. Conservation of energy leads
to the following equation:
I1 × 1 + I 1 × r 2 = I 2 × t 2 .
The quantities I1 and I2 are called acoustic impedances
I 1 = ρ 1 v1
I 2 = ρ 2 v2
where ρ1 and ρ2 are the densities of the material above
and below the interface and v1 and v2 the P-velocities,
respectively.
Combining the two boundary conditions leads to:
r =
t =
M.D.Sacchi / STMSSP
I2 − I 1
Reflection coefficient
I2 + I 1
2I1
Transmition coefficienct
I2 + I 1
46
Let’s consider the case of an incident wave propagating
upwards:
• Incident wave: ↑ in medium 2
• Reflected wave: ↓ in medium 2
• Transmitted wave: ↑ in medium 1
t’
I1
I2
1
r’
r’: reflection coefficient
t’: transmition coefficient
1+r’=t’
r = -r’
Figure 17: P-wave normal incidence. The incident wave is
propagating upwards.
r0 =
I1 − I 2
I2 + I 1
t0 =
2I2
I2 + I 1
From the above equations it is clear that
r0 = −r
M.D.Sacchi / STMSSP
47
3.2
Impulse Response
Let’s assume that we run a zero offset experiment in a
stratified earth composed of 4 layers plus a half-space.
The impedances are given by I1 , I2 , I3 , I4 , I5 .
z=0
1
(1+r1)(1+r2)(1+r3)r4(1-r3)(1-r2)(1-r1)
I1
Interface 1
z1
1+r1
(1+r1)(1+r2)(1+r3)r4(1-r3)(1-r2)
(1+r1)(1+r2)
(1+r1)(1+r2)(1+r3)r4(1-r3)
(1+r1)(1+r2)(1+r3)
(1+r1)(1+r2)(1+r3) r4
I2
z2
I3
z3
I4
Reflection at interface 4
z4
Interface 4
I5
Ii = Acoustic impedance of the layer i
1+ri = Transmition coef.
1-ri = Transmition coef.
Figure 18: Amplitude of a wave plane wave propagating
in a layered medium. Analysis of the wave reflected in the
interface 4.
M.D.Sacchi / STMSSP
48
The amplitude of the wave when reaches the layer 4 is
1 × t1 × t2 × t3 = (1 + r1 )(1 + r2 )(1 + r3)
when the wave is reflected in layer 4 the total amplitude
at that point (last expression) needs to be multiplied by
the reflection coefficient of interface 4,
1 × t1 × t2 × t3 × r4 = (1 + r1 )(1 + r2 )(1 + r3)t4
Using
1 + r0 = 1 − r
the final amplitude after propagating the wave to the
surface of the Earth is given by
(1 + r1 )(1 + r2 )(1 + r3 ) ×
|
{z
Transmition ↓
}
r
4
|{z}
Reflection
× (1 − r1 )(1 − r2 )(1 − r3 )
|
{z
Transmition ↑
The final expression for the amplitude of the wave
reflected in interface 4 can be written down as follows
}
(1 − r12 )(1 − r22 )(1 − r32 )r4 .
M.D.Sacchi / STMSSP
49
It is clear that reflections occur at all the layers:
Amplitude of the reflection generated at interface 1
A1 = r1
Amplitude of the reflection generated at interface 2
A2 = (1 − r12 )r2
Amplitude of the reflection generated at interface 3
A3 = (1 − r12 )(1 − r22 )r3
Amplitude of the reflection generated at interface 4
A4 = (1 − r12 )(1 − r22 )(1 − r32 )r4
Important: The actual ”impulse response” of the system
should include all the multiples.
M.D.Sacchi / STMSSP
50
3.3
The Seismogram
The source is not 1, we need to consider a source wavelet
w(t):
s(t) = A1 w(t−t1 )+A2 w(t−t2 )+A3 w(t−t3 )+A4 w(t−t4 )
where t1 , t2 , t3 and t4 are the arrival times of each
reflection a
• Notice that if transmission effects are neglected, the
amplitude Ai can be replaced by the reflection
coefficient ri .
• Microlayers (a discrete Earth model using layers of
equal ”travel-time”) leads to the convolutional model
sn = w n ⊗ q n .
qn is the reflectivity sequence.
a
Notice that w(t − τ ) is w(t) after being delayed τ seconds.
M.D.Sacchi / STMSSP
51
3.4
Deconvolution of Reflectivity Series
Goals:
• − > Improve resolution
• − > Consistency of sources (All seismograms after
deconvolution should have the same residual wavelet)
• − > Guarrantee phase stability
Mathematical model:
In general we will assume that deterministic noise
(multiples and ground roll) has been attenuated and
therefore what is left is random noise
sn = w n ⊗ q n + n n
It is clear from the above equation that one has a problem
with one equation (one observable) and two unknowns
(the wavelet and the reflectivity). Therefore, the seismic
deconvolution problem involves the solution of two
subproblems:
• Wavelet Estimation
• Operator design
M.D.Sacchi / STMSSP
52
3.5
The White Reflectivity Assumption
If the reflectivity is a zero-mean white noise process, the
following remarkable property is true:
rjs = Pq rjw .
• rjs : autocorrelation of the seismic trace (observable)
• Pq energy of the white reflectivity
• rjw : autocorrelation of the wavelet
IMPORTANT:
1 The autocorrelation function of the trace is an estimate
(within a scale factor) of the autocorrelation of the
wavelet.
2 It is clear that now we can estimate the autocorrelation
of the wavelet from the autocorrelation of our observable:
the seismic trace.
3 Where is the phase???
M.D.Sacchi / STMSSP
53
3.6
What to do with the noise?
We start with our noisy seismogram:
sn = w n ⊗ q n + n n
The goal of the deconvolution process is to recover qn
from the data, sn . Assume that we have compute and
inverse filer fk and we apply the filter to the seismogram
q̂k = ak ∗ qk + fˆk ∗ nk
= qk + (ak − δk ) ∗ qk + fˆk ∗ nk .
ak is the residual wavelet, ak = wt ⊗ ft
It is clear that we need to satisfy the following two
equations:
ak = wk ⊗ f k ≈ δ k ,
fk ⊗ n k ≈ 0
M.D.Sacchi / STMSSP
54
The last two expression can also be written in matrix
form
Cw f ≈ d
Cn f ≈ 0
Both equations are honored when we minimize the
following objective function:
J = ||Cw f − d||2 + β||Cn f ||2 ,
f = (Rw + µI)−1 CTw d .
M.D.Sacchi / STMSSP
55
Deconvolved reflectivity µ=0.001
seismogram (No noise)
Reflectivity, q
Figure 19: Deconvolution of a clean seismogram.
Deconvolved reflectivity µ=0.001
Noisy seismogram
Reflectivity, q
Figure 20: Deconvolution of a noisy seismogram. Small µ
Deconvolved reflectivity µ=0.05
Noisy seismogram
Reflectivity, q
Figure 21: Deconvolution of a noisy seismogram. Large µ.
M.D.Sacchi / STMSSP
56
3.7
Deconvolution in the Frequency
Domain
A procedure similar to the one outlined in the previous
section can be used to deconvolve data in the frequency
domain.
Q̂k = Qk + (Ak − 1)Qk + F̂k Nk .
• Q̂k : DFT of the Reflectivity estimate
• Qk : DFT of True the Reflectivity
• Ak : DFT of the Residual wavelet
• Fk : DFT of the Inverse filter
The inverse filter should be a good approx. to the inverse
of the wavelet:
WK Fk = Ak ≈ 1 , and avoid noise amplification: Fk Nk ≈ 0
We combine the last two equations into a single cost
function
J=
X
k
|Ak − 1|2 + α
X
|Fk Nk |2 .
k
Minimizing the cost function with respect to the filter
coefficients leads to
Wk∗
.
F̂k =
|Wk |2 + α|Nk |2
M.D.Sacchi / STMSSP
57
4
Inversion of Impedance Profiles
M.D.Sacchi / STMSSP
58
4.1
Norms for Sparse Deconvolution
Quadratic regularization (Wiener shaping filter)
sk =
X
wj qk−j ,
k = 1, ny
j
error function
²k = s k −
X
wj q̂k−j ,
k = 1, ns .
j
J =
X
k
ρ1 (
²k
),
σk
1
ρ1 (u) = u2 .
2
X
∂J
²
=
ψ( )wk−l = 0 ,
∂ql
σn
k
XX
k
wk−j wk−l qj =
j
X
l = 1, nq
wk−l sk ,
k
or in matrix form
Rq = g .
M.D.Sacchi / STMSSP
59
Stabilization (quadratic constraint)
J = J + Jq ,
J1 1 =
X
k
ρ1 (
X
qi
²k
)+
ρ1 ( ) .
σn
σq
i
The minimum of the last equation is reached at the point
q̂ = (R + µI)−1 g ,
M.D.Sacchi / STMSSP
60
Modifying Jq (non-quadratic regularization)
a
Introduce a new regularization (Huber norm) term
ρ2 (u) =
J1 2 =
u2 /2
if |u| ≤ a
2
a |u| − a /2 if |u| > a
X
k
.
X
²k
qi
ρ1 ( ) +
ρ2 ( ) .
σn
σq
i
Alternatively (Cauchy Regularization):
u2
ρ3 (u) = ln( + 1) .
2
J1 3 =
X
k
X
²k
qi
ρ1 ( ) +
ρ3 ( ) .
σn
σq
i
a
Sacchi, M.D., 1997, Re-weighting strategies in seismic deconvolution: Geophysical Journal International, 129, 651-656.
M.D.Sacchi / STMSSP
61
Iterative solution
(R + µQ)q = g .
when Huber norm is adopted:
Q2 i i =
if | σqiq | ≤ a
1
a
q
| σi
q
|
if | σqiq | > a
.
when the Cauchy norm is adopted:
Q3 i i =
1
1+
qi2
2σq2
.
Algorithm:
1. Start with an initial reflectivity sequence x0
2. Select the hyperparameters of the problem σn , σq , and
a (Huber criterion) or σn and σq (Cauchy criterion).
3. Compute µ = σn2 /σq2 , Q(0) , and the source
autocorrelation matrix R.
4. Iteratively solve above system
q(k) = (µQ(k−1) + R)−1 g
M.D.Sacchi / STMSSP
62
Remarks
• Quadratic regularizations tends to smooth or damp
the solution; this is why we cannot recover spikes.
• Non-quadratic norms like the Huber and Cauchy
norns have the ability to retrieve spikes. This is
consistent with the assupmtion of a sparse reflectivity
sequence
M.D.Sacchi / STMSSP
63
Cost and Influence Functions for Sparse Deconvolution
Figure 22: Cost functions. a) ρ1 (u), b) ρ2 (u) a = 1 , c)
ρ2 (u) a = 2 , and d) ρ3 (u).
Figure 23: Influence functions. a) ψ1 (u), b) ψ2 (u) a = 1 ,
c) ψ2 (u) a = 2 ,and d) ψ3 (u).
M.D.Sacchi / STMSSP
64
Examples
Figure 24:
a) Synthetic impulse response (left) , seismogram (center), and
source wavelet (right). The seismogram was contaminated with Gaussian noise.
b) Deconvolution using zero order quadratic regularization: estimated impulse
response (left), reconstructed seismogram (center), and residuals (original minus
reconstructed data). c) Deconvolution by means of the Huber criterion (a = 1).
d) Deconvolution by means of the Cauchy criterion.
M.D.Sacchi / STMSSP
65
Figure 25: (a) Original seismic section. (b) Deconvolved seismic section using the Cauchy criterion to regularize the inversion. The source wavelet was retrieved using a combined
cepstrum-cumulant approach.
M.D.Sacchi / STMSSP
66
4.2
Bayesian Inversion of Impedance
Impedance constraints (zk ) for a layered Earth model
(vertical incidence)
Nk
X
1
ξk = ln(zk /z0 ) =
qi ,
2
i=1
(7)
Wq = s + n
(8)
Cq = ξ + ² ,
(9)
Data constraint
Impedance constraint
General cost function
1
1 1
J = α|{z}
Jx + || (Wq − s)||2 + ||S−1 (Cq − ξ)||2 (10)
|2 σ
{z
} |2
{z
}
1
2
3
• 1 - The solution must be sparse.
• 2 - The solution must honour the seismic trace.
• 3 - The solution must honour a set of impedance
constraints.
M.D.Sacchi / STMSSP
67
Example: Huber Norm
Data and Reflectivity Estimate
M.D.Sacchi / STMSSP
68
Impedance
M.D.Sacchi / STMSSP
69
4.3
Linear Programming Impedance
Inversion
Sparse reflectiovity inversion via LP methoda
sk = w k ∗ q k .
Data constraints
Wq = s + e
Constrained minimization using linear programming
The cost function of the problem is defined as
J = α|q|1 + |e|1
Constraint minimization problem
Minimize J = α|q|1 + |e|1
subject to
and impedance constraints
Wq = s + e
ξl < Cq < ξu .
a
Oldenburg, D. W., Scheuer, T. and Levy, S., 1983, Recovery of the acoustic
impedance from reflection seismograms: Geophysics, 48, 1318-1337.
M.D.Sacchi / STMSSP
70
5
Higher order spectra and
non-minimum phase wavelet
estimation
M.D.Sacchi / STMSSP
71
5.1
Non-minimum Phase Wavelet
Estimation
• Autocorrelation based method do not preserve phase
information
• Higher order statistics do preserve phase information
when the reflectivity is a white non-Gaussian process
Model:
x k = qk ∗ wk
s k = x k + nk
W (z) = |W (z)|eiΦ(z) .
1. If qk is Gaussian and W (z) is minimum phase,
autocorrelation based methods will correctly identify both
the amplitude and the phase of the system.
2. If qk is Gaussian and W (z) is nonminimum phase, no
technique will correctly identify the phase of the system.
3. If qk is non-Gaussian and W (z) is nonminimum phase,
true magnitude and phase of the system transfer function
can be recovered by knowing the actual distribution of qk .
For MA processes of order one, it has been demonstrated
that a L1 optimization provides an estimate of the
amplitude and phase of the system when the driving noise
of the process is non-Gaussian.
M.D.Sacchi / STMSSP
72
3-rd order statistics
If W (z) is stable and if qk is non-Gaussian, white, iid.,
with skewness β 6= 0 then the bispectrum of xk is given by
Bx (z1 , z2 ) =
XX
m
rx(3) (m, n)z1n z2m
n
where
rx(3) (m, n) = E[xk xk+m xk+n ] ,
is the third order moment of the data. Since the third
order moment of a Gaussian signal vanishes, we can write
Bs (z1 , z2 ) = Bx (z1 , z2 ) . The bispectrum can be written in
terms of the transfer function W (z) as follows (Nikias and
Raghuveer, 1987)
Bx (z1 , z2 ) = βW (z1 )W (z2 )W (z1−1 z2−1 ) .
Important: Phase is preserved!
M.D.Sacchi / STMSSP
73
4-th order statistics
Defining the trispectrum as
Tx (z1 , z2 , z3 ) =
XXX
m
n
rx(4) (n, m, l)z1n z2m z3l
l
where rx(4) (n, m, l) is now the fourth order cumulant of xk .
The trispectrum can be written in terms of the transfer
function of the system as follows
Tx (z1 , z2 , z3 ) = γW (z1 )W (z2 )W (z3 )W (z1−1 )W (z1−1 z2−1 z3−1 )
γ is the Kurtosis. This is valid for a non-gaussian
symmetric distribution (γ =
6 0).
M.D.Sacchi / STMSSP
74
4-th order statistics: Wavelet estimation procedure
• Cumulant Matching
Find a wavelet (optimization problem) that
matches the cumulant of the data a
• Kolmogoroff factorization
b
retrieve the wavelet from the cumulant using a
procedure similar to the Hilbert Transform
Advantages:
• Phase can be estimated if assumptions are satisfied.
Problems:
• It is quite difficult to satisfy assumptions
a
Velis D. R., and Ulrych T. J., 1996, Simulated annealing wavelet estimation
via fourth-order cumulant, Geophysics, vol.61, 1939-1948.
b
Sacchi, M.D., and Ulrych, T.J., 2000, Non-minimum phase wavelet estimation using higher order statistics: The Leading Edge, 19, 1, 80-83.
M.D.Sacchi / STMSSP
75
Example: 4-th order Cumulant factorization
Figure 26: Synthetic wavelet.
M.D.Sacchi / STMSSP
76
Figure 27: Wavelet estimation using the tricepstrum. The
fourth order cumulant was estimated from 4 segments of
1000 samples each. The figures correspond to 20 realizations of the process.
M.D.Sacchi / STMSSP
77
Figure 28: Wavelet estimation using the tricepstrum. The
fourth order cumulant was estimated from 4 segments of
500 samples each. The figures correspond to 20 realizations
of the process.
M.D.Sacchi / STMSSP
78
Figure 29: Wavelet estimation using the tricepstrum. The
fourth order cumulant was estimated from 4 segments of
250 samples each. The figures correspond to 20 realizations
of the process.
M.D.Sacchi / STMSSP
79
Real data example
Figure 30: Segment of seismic section pre-processed for
impedance inversion.
Figure 31: Wavelet estimates computed using the tricepstrum (left) and cumulant matching plus non-linear optimization (right).
M.D.Sacchi / STMSSP
80
5.2
Minimum entropy deconvolution
In MED a we exploit, again, the assumption of a white
non-Gaussian reflectivity (sparse reflectivity assumption)
Find ft (a filter)
q t = s t ∗ ft
such that
N
X
1
V (q) =
qi0 .F (qi0 ), is maximized
N F (N ) i=1
where
qi0
yi 2
.
=P
2
k yk /N
F (q 0 ) = ln(q 0 ) For a logarithmic norm
Solution involves an iterative algorithm of the form
Rf k = gk−1 that can be interpreteted as a shaping filter
with a non-linear (sparse) desired output!!
a
Wiggins, R. A., 1978, Minimum entropy deconvolution: Geoexpl., v.16, p.21-
35.
M.D.Sacchi / STMSSP
81
Frequency domian MED algorithm
a
• The MED is extended to deal with the problem of
band-limited extrapolation (recovery of low/high
freqs.)
• Can be used to improve the freq. content of the
residual wavelet obtained after conventional
deconvolution
a
Sacchi,M.D., Velis D., & Cominguez, A.H., 1994, Frequecny domain Minimum Entropy deconvolution: Geophysics, vol. 59, No. 6.
M.D.Sacchi / STMSSP
82
6
FX Processing
M.D.Sacchi / STMSSP
83
6.1
FX filters
Remark: Predictability of linear eventsa
The signal model:
S(f, x) = A(f ) ei2πf θx ,
where A(f ) indicates the source spectrum, f the temporal
frequency, x the spatial variable or offset and θ the
apparent slowness along x. We will assume that the
spatial variable x is regularly discretized according to
x = (k − 1)∆x , k = 1 : N . For any temporal frequency, f ,
we can write
Sn = A eiαn ,
n = 1, N
where α = 2πf θ∆x. The following recursion is obtained
by combining Sn and Sn−1
Sn = a1 Sn−1 .
where a1 = exp(iα). The last equation is a first order
difference equation that allows us to recursively predict
the signal along the spatial variable x.
a
Canales, L. , 1984, Randon noise reduction: 54th Annual SEG Meeting,
p.525-527.
M.D.Sacchi / STMSSP
84
Model for p linear events
Sn = a1 Sn−1 + a2 Sn−2 + . . . ap Sn−p .
The last equation can be written in prediction error form
as follows
p
X
gk Sn−k = 0 ,
k=0
where
g0 = 1, gk = −ak ,
k = 1, p .
In real applications, however, additive noise will corrupt
the data
Yn = S n + W n ,
The model for the noisy signal becomes
Pp
k=0 gk Yn−k =
Pp
k=0
gk Wn−k
= en .
The latter is an ARMA(p,p) process in which the AR and
MA components are identical.
M.D.Sacchi / STMSSP
85
6.2
AR FX Filters
Rather than trying to solve the ARMA equations one can
replace the ARMA model by a long AR (Autoregressive)
model:
Yn − f1 Yn−1 + f2 Yn−2 . . . + fp Yn−p = Wn .
The last equation can be written in matrix form as follows
(assume p = 3),
y1
0
y2 y1
y3 y2
y4 y3
0
y4
0
0
0
0
y1
y2
y3
y4
f1
f2
−
f3
y2
y3
y4
0
0
=
w2
w3
w4
0
.
0
Solve for the filter that minimizes: Yf − d = w
J = ||Y f − d||2 , ∇J = 0, => f̂ = (Y H Y)−1 YH d ,
Clean signal d̂ = Yf̂ .
M.D.Sacchi / STMSSP
86
The convolution matrix:
We have adopted a very simple convolution matrix in
order to design our filter via the Levinson’s recursion. But
bear in ming that other data matrices can be used to
estimate the data prediction filter.
Canales (1984) original formulation uses the following
model
y1
0
y2 y1
y3 y2
y4 y3
0
y4
0
0
0
0
y1
y2
y3
f1
f2
=
f3
y4
y2
y3
y4
0
.
0
Ulrych and Clayton (1976) proposed the transient-free
convolution matrix. In our simple example (p = 3) the
transient-free matrix formulation is given by
M.D.Sacchi / STMSSP
y4
y3 y2 y1
f1
y5
y4 y3 y2
.
=
f2
y5 y4 y3
y6
f3
y7
y6 y5 y4
87
Algorithm
1. Transform the data into the F X domain
Data(t, x) → Data(f, x)
2. for each frequency f solve the 1D-AR prediction
problem
3. Apply the filter to the data (convolution of the filter
with the data).
4. Transform back to T X
Data(f, x) → Data(t, x)
5. end
M.D.Sacchi / STMSSP
88
1D Example
Prediction of harmonics using AR filters p=20
5
4
3
2
1
0
−1
0
50
100
150
n, number of samples
200
250
300
Figure 32: Prediction of a single harmonic (no noise) using
AR filters
Prediction of harmonics using AR filters p=20
6
5
4
3
2
1
0
−1
−2
0
50
100
150
n, number of samples
200
250
300
Figure 33: Prediction of a single harmonic (σnoise = 0.2)
using AR filters
M.D.Sacchi / STMSSP
89
Input, σn=0.2
0
20
40
60
80
100
120
0
5
10
15
20
25
30
25
30
Output after FX filtering, p=20
0
20
40
60
80
100
120
0
5
10
15
20
Figure 34: F X filtering of a single linear event immersed
in noise
Input, σn=0.2
0
20
40
60
80
100
120
0
5
10
15
20
25
30
25
30
Output after FX filtering, p=20
0
20
40
60
80
100
120
0
5
10
15
20
Figure 35: F X filtering of a single linear hyperbolic event
immersed in noise
M.D.Sacchi / STMSSP
90
6.3
FX Gap filling and the recovery of
near offset traces
Original idea published in seismologya . Assume a gap in
the interval n1, n2. The prediction error for the AR model
in terms of the AR coefficients is given by
En = g0 Yn + g1 Yn−1 + g2 Yn−2 + . . . gp Yn−p
Since the gap comprises the traces Yn1 , Yn1 +1 , . . . Yn2 , we
will minimize the squared sum of the prediction error
within the gap
n2
X
Ek Ek ∗
k=n1
Taking derivatives with respect to the samples in the gap
we end up with the following system
Rg (Yn1 Yn1 +1 . . . Yn2 )T = b
The missing data in the gap can be recovered by knowing
the PEF.
a
Wiggins, R. A, and Miller, S. P., 1972, New noise-reduction technique applied
tolong-period oscillations from the Alaskan earthquake: SSA Bull., 62, 417-479
M.D.Sacchi / STMSSP
91
(m)
0
0
50
(m)
100
150
0
50
100
150
Time (sec)
0.5
Time (sec)
0.5
0
1.0
1.0
1.5
1.5
Original Data
Data after Gap Filling
Figure 36: Predictability of linear events. The AR gap
filling techniques is used to estimate a PEO wich is latter
utilized to fill the gap.
M.D.Sacchi / STMSSP
92
Source-Receiver Distance (m)
0
2000
0
1
1
2
2
Time (sec)
Time (sec)
0
-2000
3
4
-2000
Source-Receiver Distance (m)
0
2000
3
4
5
5
Original Data
Data after Gap Filling
Figure 37: oz01.dat Original (left), after gap filling with a
PEO(3)
M.D.Sacchi / STMSSP
93
6.4
F X Projection Filters
In this section we will study the problem of
quasi-predictability and the solution via projection filters
a
Space domain formulation
s = s0 + n Additive noise
As0 = i Predictability .
In this case the vectors denote the spatial series of
observations s and the unknowns s0 and n. The operation
As0 also corresponds to convolution with the PEO.
Soubaras proposed to minimize the following cost
function:
J = (s − s0 )T (s − s0 ) + µs0 T AT As0
taking derivatives yields to
s = (I + µAT A)s0
since s = s0 + n
a
Soubaras R., 1994, Signal preserving random noise attenuation by the f-x
projection: 64 Annual SEG Mtg. 1576-1579.
M.D.Sacchi / STMSSP
94
s = (I + µAT A)(s + n) then n = µ(I + µAT A)−1 AT As
After using the identity
AT (I + µAAT )−1 = (I + µAAT )−1 AT ,
n = AT (µ−1 I + AAT )−1 As .
The projection filter deconvolves the PEO filter. To prove
this assessment suppose that we know the filter A.
Unfortunately is not true that we know the s0 , but
suppose that we apply the filter to s
As = A(s0 + n) = As0 + An .
It is clear from the last expression that the filter output has
two sources of errors: The color introduced by the PEF and
the noise. The color introduced by the PEF can be partially
removed by deconvolution:
n = AT (µ−1 I + AAT )−1 (As)
|
{z
2
}| {z }
1
The operation 1 does the filtering of the signal and the noise,
meanwhile the operation 2 removes the color that the filter
has introduced into the noise (deconvolution of the PEO).
M.D.Sacchi / STMSSP
95
6.5
ARMA formulation of Projection
filters
It is important to note that underlying signal model in
f − X is an ARMA model.
Pp
k=0 gk Yn−k =
Pp
k=0
gk Wn−k
= en .
The problem now can be summarized as follows, given the
ARMA representation of the noise signal:
1. How do we estimate the prediction error filter gk ?
2. How do we use gk to estimate the additive noise
sequence Wk .?
These two fundamental points are discussed in the
following pages.
M.D.Sacchi / STMSSP
96
Estimation of the ARMA prediction error filter
ARMA system in matrix form:
Yg = Wg
= e,
Y=
Y0
0
Y1 Y0
Y2 Y1
Y3 Y2
0
Y3
0
0
0
0
Y0
Y1
Y2
.
Y3
After some mathematical manipulations we can arrive to
RY g = P W g .
The matrix RY = YH Y is the Toeplitz correlation matrix
of the noisy data.
• the PEF is the eigen-vector associated to the min.
eigenvalue of the data covariance matrix
• the minimum eigenvalue is an estimate of the power
of the noise
M.D.Sacchi / STMSSP
97
Noise estimation
Re-write the ARMA system as follows (Convolution can
commute)
Gy = Gw .
The matrix G is the convolution matrix of the prediction
error filter, y and w are vectors containing the
observations and the white noise sequence, respectively.
Minimize
J = [G(y − w)]H [G(y − w)]
subject to
w H w = Pw .
M.D.Sacchi / STMSSP
98
6.6
Noise estimation
The constrained minimization problem is solved by
introducing a Lagrange multiplier to combine the last two
equations into a new objective function
J 0 = [G(y − w)]H [G(y − w)] + µ(wH w − PW ) .
The objective function J 0 is minimized by the following
estimator of the noise sequence
ŵ = (GH G + µI)−1 GH Gy .
The clean signal, ŝ = y − ŵ, can be estimated as follows:
ŝ = [I − (GH G + µI)−1 GH G]y .
Remarks:
• If µ = 0, ŵ = y.
• If µ is too large, ŵ = 0.
M.D.Sacchi / STMSSP
99
1D - Projection filter - Examples
4
3
Y
2
Wk
k
1
S
k
0
0
20
40
60
Samples
80
100
120
Figure 38:
D synthetic example. A sinusoid of normalized wavenumber k 0 =
0.05 is used to test the ARMA filtering method described in the paper. The data
are contaminated with white noise with standard error σ = 0.5.
6
5
µ=0.0001
4
µ=0.01
3
µ=1
2
µ=100
1
µ=10000
0
0
20
40
60
Samples
80
100
120
Figure 39:
The eigenfilter estimated from the noisy data is used to estimate
the noise. In this figure we portray the estimator of the noise sequence versus the
tradeoff parameter µ. Large values of µ will completely annihilate the noise. Small
values of µ will overestimate the noise (the signal leaks into the noise sequence.)
M.D.Sacchi / STMSSP
100
6
5
µ=0.0001
4
µ=0.01
3
µ=1
2
µ=100
1
µ=10000
0
0
20
40
60
Samples
80
100
120
Figure 40:
Estimator of the signal versus the tradeoff parameter µ. Note that
for µ = 0.01 the signal is recovered.
µ=0.0001
0
µ=0.01
Amplitude Spectrum [dB]
−20
µ=1
−40
µ=100
−60
µ=10000
−80
−100
−120
0
0.02
0.04
0.06
0.08
0.1
0.12
Normalized wavenumber
0.14
0.16
0.18
0.2
Figure 41:
Amplitude response of the projection filter utilized to estimat e
the noise. Note that large values of µ attenuates both signal and noise. On the
other h and, small value of µ does not properly attenuate the signal.
M.D.Sacchi / STMSSP
101
ARMA (Projection filter) vs AR Filtering (Canales’
Method)
0
Time (sec)
0.1
0.2
0.3
FX ARMA(3,3)
Figure 42:
Left: The original data (3 waveforms immersed in spatially uncorrelated noise). Center: Filtered data using the ARMA representation. Right:
Estimate of the noise.
0
Time (sec)
0.1
0.2
0.3
FX AR(15)
Figure 43:
Left: The original data (3 waveforms immerse in spatially uncorrelated noise). Center: Filtered data using the AR representation (Conventional
f − x r andom noise attenuation). Right: Estimate of the noise.
M.D.Sacchi / STMSSP
102
Example: SNR of a Common Offset Section
0
0.2
0.4
Time (sec)
0.6
Figure 44:
Left: A window of a common offset gather. Center: The filtered
section using the ARMA representation with a 3 points eigenfilter (p = 2). Right:
Conventional f − x random noise attenuation (p = 15).
M.D.Sacchi / STMSSP
103
7
Eigenimages
M.D.Sacchi / STMSSP
104
7.1
Decomposition in Eigenimages
Consider seismic data as a matrix. The matrix can be
decomposed in r eigen-vectors ui , vi :
X=
r
X
σi ui viT .
i=1
Reconstructed data matrix using p-eigenimages
Xp =
p
X
σi ui viT .
i=1
p<r
• Xp retains the information that is coherent trace to
trace
M.D.Sacchi / STMSSP
105
Eigen-images: Example
Input, σ =0.2
n
0
20
40
60
80
100
120
0
5
10
15
20
25
30
25
30
Reconstruction with 1 Eigenimage
0
20
40
60
80
100
120
0
5
10
15
20
Figure 45: A flat event immersed in nose and the reconstruction by means of the first eigenimage
25
20
λ
i
15
10
5
0
0
5
10
15
20
Singular value index, i
25
30
35
Figure 46: Spectrum of singular values.
M.D.Sacchi / STMSSP
106
Input, σn=0.2
Reconstruction with 1 Eigenimage
Reconstruction with 2 Eigenimages
Reconstruction with 3 Eigenimages
Figure 47: A Parabolic event immersed in nose and the
reconstruction by means of the 1,2 and 3 eigenimages
16
14
12
λ
i
10
8
6
4
2
0
0
5
10
15
20
Singular value index, i
25
30
35
Figure 48: Spectrum of singular values.
M.D.Sacchi / STMSSP
107
7.2
Eigen-structure based Velocity
Analysis
We use the eigen-decomposition of the data covariance
matrix as a coherence measure.a
In velocity analysis the covariance matrix is computed
from windows (gates) extracted from the data along a
hyperbolic trajectory (NMO curve).
SNR Coherence measure
P
N
λ̂
−
1
1
i=2 λ̂i /(N − 1)
.
Cb =
PN
N
i=2 λ̂i /(N − 1)
λ̂i are estimators of the eigenvalues for a given gate of
analysis.
a
Key S.C. and Smithson S. B., 1990, New approach to seismic-reflection event
determination: Geophysics, 55, 1057-1069.
M.D.Sacchi / STMSSP
108
Figure 49: Left: Semblance of a CMP gather. Right: High
resolution coherence analysis (SNR measure).
Figure 50: Left: Average SNR measure obtained via bootstrapping individual realizations. Right: Frequency distribution of
the peak that maximizes the coherence after 50 bootstrap realizations.
M.D.Sacchi / STMSSP
109
8
Radon Processing
M.D.Sacchi / STMSSP
110
8.1
Slant Stacks
Let u(h, t) represent a seismic signal in offset-time. We
define the slant stack or Linear Radon transform as
follows:
v(p, τ ) = (Lu)(p, τ ) =
Z ∞
−∞
u(h, t = τ + h p)dh .
(11)
Where p and τ denote the slope or ray parameter and the
intercept time, respectively. v(p, τ ) is used to designate
the signal in the τ − p domain.
The adjoint transform L∗ is given by
ũ(h, t) = (L∗ v)(p, τ ) =
M.D.Sacchi / STMSSP
Z ∞
−∞
v(p, t = τ − hp)dp .
(12)
111
Slant stacks in the freq. domain:
In the frequency domain, the pair of transformations are
given by,
V (p, ω) =
Z ∞
U (h, ω)eiωph dh,
(13)
Ũ (h, ω) =
Z ∞
V (p, ω)e−iωph dp,
(14)
−∞
−∞
Last two equations can be combined:
Ũ (h, ω) =
Z ∞
−∞
U (h0 , ω)
Z ∞
−∞
0
e−iωp(h−h ) dp dh0
(15)
which may be written as follows
Ũ (h, ω) = U (h, ω) ∗ ρ(h, ω) ,
(16)
where ∗ denotes convolution and the function ρ is given
by
ρ(h, ω) =
Z ∞
−∞
e−iωph dp ,
(17)
making the substitution z = −ωp equation (17) becomes
M.D.Sacchi / STMSSP
112
ρ(h, ω) =
Z ∞
−∞
2π
1 ihz
e dz =
δ(h) .
|ω|
|ω|
(18)
The convolution operator is a delta function with respect
to the variable h. Using the property of the δ function,
Ũ (h, ω) =
=
2π
U (h, ω)
|ω|
2π
U (h, ω)
|ω|
∗ δ(h)
(19)
the inversion formula becomes,
U (h, ω) =
M.D.Sacchi / STMSSP
|ω|
Ũ (h, ω) .
2π
(20)
113
8.2
The Inverse Slant Stack Operator
The definition of the forward slant stack operator and its
adjoint may be changed to construct another slant stack
pair,
∗
u(h, t) = (L v)(p, τ ) =
ṽ(p, τ ) = (Lu)(h, t) =
Z ∞
v(p, t = τ − hp)dp
(21)
u(h, t = τ + hp)dh,
(22)
−∞
Z ∞
−∞
the pair of transformations can be posed in the
frequency-offset domain,
U (h, ω) =
Z ∞
V (p, ω)e−iωph dp,
(23)
Ṽ (p, ω) =
Z ∞
U (h, ω)eiωph dh .
(24)
|ω|
Ṽ (p, ω) .
2π
(25)
−∞
−∞
After some math:
V (p, ω) =
M.D.Sacchi / STMSSP
114
8.3
Discrete Slant Stacks
Discrete versions of equations the continuous Radon pair
are obtained by replacing integrals by summations and
imposing finite limits.
Lf
X
v(p, τ ) = (Lu)(p, τ ) =
u(hl , τ + hl p)∆hl ,
(26)
l=Ln
∗
ũ(h, t) = (L v)(τ, p) =
JX
max
v(h, t − hp)∆pj
(27)
j=Jmin
Taking the Fourier transform of the above equations
yields
V (p, f ) =
Lf
X
U (hl , f )e2πif hl p ∆hl
(28)
V (p, f )e−2πif hpj ∆pj .
(29)
l=Ln
Ũ (h, f ) =
JX
max
j=Jmin
Using matrix notation
m = LH d
d̃ = Lm
M.D.Sacchi / STMSSP
115
Inversion formula Discrete Slant Stacks
d̃ = L LH d .
d = (L LH )−1 d̃
−1
= G d̃ .
m = Ld
−1
d = G Lm .
M.D.Sacchi / STMSSP
(30)
(31)
(32)
116
8.4
Slant Stacks: The Least Squares
Solution
Assume that the data is the result of applying a Radon
operator (slant stack) to a m.
d = Lm
(33)
The idea is to find m such that the following objective
function is minimized
J = ||d − Lm||2
(34)
The solution to this problem is the least squares solution
m = (LH L)−1 LH d
(35)
In general the inverse needs to be stabilized using a
damping parameter.
m = (LH L + µI)−1 LH d
M.D.Sacchi / STMSSP
(36)
117
Example: LS Linear Radon
(a)
(b)
0
0.2
0.2
0.4
0.4
t (s)
τ (s)
0
0.6
0.6
0.8
0.8
−0.05
0
h (km)
0.05
−5
(c)
0
p (s/km)
5
(d)
0.2
0.2
0.4
0.4
t (s)
0
t (s)
0
0.6
0.6
0.8
0.8
−0.05
0
h (km)
0.05
−0.05
0
h (km)
0.05
Figure 51: Linear RT synthetic example. (a) Events in t − x.
(b) τ − p panel computed using the LS linear RT. (c) and (d)
Separated waveforms using the τ − p panel.
M.D.Sacchi / STMSSP
118
8.5
Parabolic Radon Transform
This is a simple modification to the slant stack, instead of
integrating along curves of the form
t = τ + ph
we use curves of the type
t = τ + qh2
This is a good approximation to process data containing
hyperbolic events after NMO correction.
M.D.Sacchi / STMSSP
119
Residual Moveout and the Parabolic Radon Transform
Traveltime for a multiple and a primary
Tp =
q
Tm =
q
(T02 + h2 /vp2 )
2 ).
(T02 + h2 /vm
Assume that vp > vm . Traveltimes after NMO with vN M P :
∆TN M O = T0 −
q
2
(T02 + h2 /vN
MO) ,
Tp (Af ter) = Tp + ∆TN M O
if vN M O = vp
Tp (Af ter) = T0 .
Tm (Af ter) = Tm + T0 −
q
2
(T02 + h2 /vN
MO) ,
or after replacing Tm
Tm (Af ter) = T0 +
M.D.Sacchi / STMSSP
q
(T02
+
2 )
h2 /vm
−
q
2
(T02 + h2 /vN
MO)
120
Expanding in Taylor series
Tm (Af ter) = T0 +
q
(T02
Tm (Af ter) ≈ T0 +
+
2 )
h2 /vm
−
q
2
(T02 + h2 /vN
MO)
1
1
2
2
h
−
h
2
2
2T0 vm
2T0 vN
MO
Tm (Af ter) ≈ T0 + qh2
q=
1
1 1
( 2− 2
).
2 T0 v
vN M O
A Radon transform with the following integration path is
capable of collapsing parabolas (multiples) to points in
the τ, q space.
h2
t=τ +q 2 ,
hmax
M.D.Sacchi / STMSSP
121
Example: LS Parabolic Radon Transfrom
(a)
(b)
0
0.2
0.2
0.4
0.4
t (s)
τ (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.05
q (s)
(c)
0.1
(d)
0.2
0.2
0.4
0.4
t (s)
0
t (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.01
0.02 0.03
h (km)
0.04
0.05
Figure 52: Least squares Parabolic Radon Transform synthetic
example. (a) Events in t − x. (b) τ − q panel computed using
the LS parabolic RT. (c) and (d) Separated waveforms using
the isolate the waveforms.
M.D.Sacchi / STMSSP
122
8.6
Radon De-multiple
Working flow:
• NMO the CMP gather with the vN M O ≈ vp
• Compute the Radon Gather
• Mute primaries
• Come back to CMP domain − > This is your
estimate of multiples
• Subtract multiples from data
Problems:
• Not enough focusing of primaries and multiples
(smearing)
• Alias might hampered the reconstruction and
therefore the substraction of the model of multiples
from the data.
• One solution to these problems is to design a high
resolution Radon Transform
M.D.Sacchi / STMSSP
123
Least squares Parabolic Radon Transform
d(xj , t) =
M
X
a
m(qk , τ = t − qk x2j ) , j = 1, N ,
k=1
d(xj , t): CMP gather, m(qk , τ ): Radon panel
In the frequency domain:
d(xj , f ) =
M
X
2
m(qk , f ) ei2πf qk xj , j = 1, . . . , N .
k=1
The calculations can be carried out independently for
each frequency f .
d(f ) = L(f ) m(f ) .
To avoid notational clutter we will drop the frequency
dependency and write d = L m . The least squares Radon
operator is estimated by minimizing the following cost
function.
J = ||d − L m ||2 + µ||m||2 .
m = (LH L + µI)−1 madj
=
(R + µI)−1 madj .
a
Hampson, D., 1986, Inverse velocity stacking for multiple elimination: J.
Can. Soc. Expl. Geophys., 22, 44-55.
M.D.Sacchi / STMSSP
124
Least squares Parabolic Radon Transform
FAST ALGORITHM, Levinson alg. a
Elements of R
{R + µI}l,m =
N
X
2
e−i2πf ∆q(l−m)xk + µδl,m .
k=1
This is a Toeplitz matrix, solving this equation using the
Levinson recursion requires approximately 4M 2 + 7M
operations, and storage of only the first row of the
Toeplitz matrix.
a
Kostov, C., 1990, Toeplitz structure in slant-stack inversion: 60th Annual
Internat. Mtg., Soc. Expl. Geophys., Expanded Abstracts, 1618-1621.
M.D.Sacchi / STMSSP
125
8.7
High Resolution Radon
Solve the following problem
(R + WH W)m = madj .
{W}l,m = wl δl,m , l, m = 1, . . . , M .
(37)
The elements of W are chosen to increase the resolution
of the operator.
The operator is not a Toeplitz form; therefore the solution
of the system of equations is proportional to M 3 (Too bad
for Marine data sets!).
wk2
M.D.Sacchi / STMSSP
=
100.
if qk ∈
/Q
0.0001
if qk ∈ Q ,
126
High Resolution Parabolic Radon
FAST VERSION, CG+FFT a
Use CONJUGATE GRADIENTS to solve the problem
iteratively!
We want to solve (R + D)m = madj , where D = WH W.
Start with an initial solution m0 , set
p0 = r0 = madj − (R + D)m0 ,
αi+1 = (ri , ri )/(pi , (R + D)pi )
mi+1 = mi + αi+1 pi ri+1 = ri − αi+1 (R + D)pi
βi+1 = (ri+1 , ri+1 )/(ri , ri )
pi+1 = ri+1 + βi+1 pi
where i = 0, 1, 2, . . . K denotes the iteration number.
The product (R + D)x can be decomposed into two
products: Rx + Dx. The first product can be efficiently
computed using the Fast Fourier Transform (FFT), the
second product involves only 2M operations (M products
plus M additions) and does not substantially increase the
computational cost of the inversion.
a
Sacchi, M.D., and Porsani, M.J., 1999, Fast high resolution Radon transform:
69th Annual Intern. Mtg. Soc. Expl. Geophys., Expanded Abstracts, 1657-1660.
M.D.Sacchi / STMSSP
127
Example
1. Lev: Classical least squares parabolic Radon transform
implemented via the Levinson recursion (valid for a
constant damping).
2. Chol: High resolution Radon transform implemented via
the Cholesky decomposition.
3. CG+FFT: High resolution parabolic Radon transform
implemented via conjugate gradients plus matrix times
vector multiplication using the FFT.
N ×M
Lev
Chol
CG+FFT
128 × 128
2
6
3
256 × 256
8
42
12
Table 1: CPU times in seconds for the 3 algorithms tested
in this study. N denotes the number of traces and M the
number of q parameters, Origin 2000.
M.D.Sacchi / STMSSP
128
0.4
0
offset(m)
500
q(s)
1000
0.4
0
0.1
0.2
0.6
t(s)
tau(s)
0.6
0.8
0.8
1.0
1.0
CMP gather
tau-q (Lev.)
q(s)
0.4
0
0.1
q(s)
0.2
0.4
0.1
0.2
tau(s)
0.6
tau(s)
0.6
0
0.8
0.8
1.0
1.0
tau-q (Chol.)
tau-q (CG+FFT)
Figure 53:
A synthetic CMP gather composed of 4 parabolic events is used to
test 3 different algorithms to compute the Radon transform. Lev. indicates the
classical solution using least squares with a constant damping term; the Levinson
algorithm is used to invert the resulting Toeplitz form. Chol. indicates the high
resolution solution using non-constant damping (8)), this solution is computed
by means of the Cholesky decomposition. CG+FFT indicates the proposed fast
algorithm to compute the high resolution Radon transform. In this example the
size of the Radon operator is 256 × 256.
M.D.Sacchi / STMSSP
129
LS versus HR: Comparison
(a)
(b)
0
0.2
0.2
0.4
0.4
t (s)
τ (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.05
q (s)
(c)
0.1
(d)
0.2
0.2
0.4
0.4
t (s)
0
t (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.01
0.02 0.03
h (km)
0.04
0.05
Figure 54:
PRT synthetic example. (a) Events in t − x. (b) τ − q panel
computed using the LS parabolic RT. (c) and (d) Separated waveforms using the
τ − q panel.
(a)
(b)
0
0.2
0.2
0.4
0.4
t (s)
τ (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.05
q (s)
(c)
0.1
(d)
0.2
0.2
0.4
0.4
t (s)
0
t (s)
0
0.6
0.6
0.8
0.8
0
0.01
0.02 0.03
h (km)
0.04
0.05
0
0.01
0.02 0.03
h (km)
0.04
0.05
Figure 55:
High resolution parabolic RT synthetic example. (a) Events in
t − x. (b) Radon panel computed using the high resolution parabolic RT and (d)
Separated waveforms using the τ − q panel (to be compared with Fig. 54).
M.D.Sacchi / STMSSP
130
8.8
Determination of weights for the HR
Radon Tranform
Non-linear problem: D = D(m)
(R + D)m = madj .
If the Cauchy regularization is adopted: Dii =
Classical Solution: IRLS
µ
(1+|mi |2 /σ 2 )
a
For all freqs f solve:
(R + Dk−1 )mk = madj .
µ
Diik−1 =
|2 /σ 2 )
(1 + |mk−1
i
end
Non-iterative solution: k− > f
b
For all freqs f solve:
(R + Df −1 )mf = madj .
µ
Diif −1 =
(1 + |mfi −1 |2 /σ 2 )
end
with f − 1 ≡ f − ∆f
a
Sacchi, M.D., and Ulrych, T.J., 1995, High resolution velocity gathers and
offset space reconstruction: Geophysics, 60, 1169-1177.
b
Herrmann, P., Mojesky, T., Magesan, M. and Hugonnet, P., 2000, De-aliased,
high-resolution Radon transforms: 70th Ann. Internat. Mtg: Soc. of Expl.
Geophys., 1953-1956.
M.D.Sacchi / STMSSP
131
Two passes solution:
i) Use the LS algorithm to estimate m
ii) Compute D from m for all freqs.
Diif =
µ
(1 + |mfi |2 /σ 2 )
iii) For all freqs f solve:
(R + Df )mf = madj .
end
Remarks:
• First pass with Levinson’s recursion , second with
CG+FFT.
• Does not give the highest resolution but attenuates
quite well alias.
M.D.Sacchi / STMSSP
132
Alias artifacts
0
Max Offset = 1910m
1
0
1
1
2
2
0
Residual Moveout, q (Seconds)
2
4
0
0
Residual Moveout, q (Seconds)
2
4
20
40
4
3
Frequency (Hz)
t (Seconds)
tau (Seconds)
3
4
60
80
5
5
100
6
6
7
7
120
(a)
(b)
(c)
Figure 56:
a) CMP gather. b) Least squares (Low res.) Radon Transform. c)
f − q spectrum of the data. Notice that spite of the aliasing artifacts corrupting
the Radon panel, the f − q spectrum clearly shows the prescence of 4 well-defined
modes.
M.D.Sacchi / STMSSP
133
0
Max Offset = 1910m
1
0
1
0
2
2
2
3
3
3
t (Seconds)
1
t (Seconds)
1
t (Seconds)
1
4
4
4
5
5
5
6
6
6
7
7
(a)
1
7
(b)
(c)
Figure 57:
a) Data. b) Multiples estimated from the Radon panel in Fig. 56.
c) Primaries estimated via substraction of the multiple model from the original
data.
M.D.Sacchi / STMSSP
134
0
Max Offset = 1910m
1
0
1
1
2
2
0
Residual Moveout, q (Seconds)
2
4
0
0
Residual Moveout, q (Seconds)
2
4
20
40
4
3
Frequency (Hz)
t (Seconds)
tau (Seconds)
3
4
60
80
5
5
6
6
7
7
100
120
(a)
(b)
(c)
Figure 58:
a) CMP gather. b) High resolution Radon Transform. c) f − q
spectrum of the data. Notice that spite of the aliasing artifacts corrupting the
Radon panel, the f − q spectrum clearly shows the prescence of 4 well-defined
modes. De-aliasing was achieved by the two passes algorithm.
M.D.Sacchi / STMSSP
135
0
Max Offset = 1910m
1
0
1
0
2
2
2
3
3
3
t (Seconds)
1
t (Seconds)
1
t (Seconds)
1
4
4
4
5
5
5
6
6
6
7
7
(a)
1
7
(b)
(c)
Figure 59:
a) Data. b) Multiples estimated from the Radon panel in Fig. 58.
c) Primaries estimated via substraction of the multiple model from the original
data.
M.D.Sacchi / STMSSP
136
Resolution enhancement: Impulse response
2.0
60
65
70
75
80
2.0
2.5
2.5
3.0
3.0
60
65
70
75
80
Figure 60: Left: Least squares. Right: High resolution, two
passes algorithm.
M.D.Sacchi / STMSSP
137
8.9
Hyperbolic Radon Transform
• Parabolic Radon Transform operates on NMO
corrected gathers (Bad at far offsets)
• Hyperbolic Radon Transform operates directly on
CMP gathers
Hyperbolic Radon Transform are used to compute Time
Variant Velocity Gathers (Velocity Gathers or Velocity
Stacks).
d(t, h) =
Z
m(τ =
q
t2 − h2 /v 2 , v) dv ,
d(t, h) : CMP gather
m(τ, v) : Velocity gather
Remarks:
• The operator is time variant, as a consequence there
are no frequency domain algorithms.
• The operator can be packed in a matrix or applied in
the flight
M.D.Sacchi / STMSSP
138
Discrete case
d, m: data and velocity gather in lexicographic
arrangement
d = Lm .
size of d: nt × nh
size of m: nτ × nv →
size of the operator L: (nt × nh) × (nτ × nv)
The problem
M inimize {φ = ||Lm − d||22 }
m̂ = (LT L)−1 LT d = (LT L)−1 m0 ,
Question How do we invert (LT L) to obtain the Velocity
gather?
Answer Direct inversion: NO WAY
Example: nv = nh = 48, nt = nτ = 1000 then LT L is
24000 × 24000
Solution Use semi-iterative technique for large sparse
operators (i.e., Conjugate Gradients)
M.D.Sacchi / STMSSP
139
Hyperbolic Radon Transform: CG solution
To apply CG we need to know how to do the following
two operations:
Lx Apply L to a vector in model space
LT y Apply LT to a vector in data space
Remark: L is never stored as a matrix; we treat it as an
operator
M.D.Sacchi / STMSSP
140
The Algorithm (CGLS)
To solve the problem ||Lx − y||2 with an initial solution
x0 , we use the following algorithm:
Set initial values: r = y − L x0 , g = LT r , s = g
γ0 = ||g||2
for i = 1:IT ERM AX
ss = Ls
do it
∆ = ||ss||2
α = γi−1 /∆
x = x+αs
r = r − α ss
g = LT r
undo it
γi = ||g||2
β = γi /γi−1
s=g+βs
end
M.D.Sacchi / STMSSP
141
Hyperbolic Radon Transform: Example
0
200
400
Offset (m)
600
800
1000
1000
0
0.4
0.4
V (m/s)
2000
2500
3000
Time (s)
0.2
Time (s)
0.2
1500
0.6
0.6
0.8
0.8
(a)
1000
0
1500
V (m/s)
2000
2500
(b)
3000
0
0.4
0.4
400
Offset (m)
600
800
1000
Time (s)
0.2
Time (s)
0.2
200
0.6
0.6
0.8
0.8
(c)
(d)
Figure 61:
(a) Synthetic data. (b) Velocity gather obtained using the adjoint
operator. (c) Velocity gather computed using the least-squares inversion. (d)
Recovered data (primary) obtained after the de-multiple process.
M.D.Sacchi / STMSSP
142
Artifacts
1000
0
1500
V (m/s)
2000
2500
3000
Near Offset Artifacts
0.2
Alias
Time (s)
0.4
0.6
Far Offset Artifacts
0.8
(c)
Figure 62: Velocity gather after clipping
M.D.Sacchi / STMSSP
143
Hyperbolic Radon Transfrom: The operator
CGLS needs to call the following operator - Matrices are
not needed!!
. . . . . . . .
! c is a flag c=’a’ : adjoint operator
!
c=’f’ : forward operator
! strange stuff is for linear interpolation!!
if(c.eq.’a’) call clean(m,nv,nt)
if(c.eq.’f’) call clean(d,nh,nt)
! initialize m with zeros
! initialize d with zeros
do ih =1,nh
do iv=1,nv
do itau=1,nt
ttt=(itau-1)*dt
time=sqrt(ttt**2+(h(ih)/v(iv))**2)
it1 = int(time/dt)
a = time/dt - float(it1)
!Coeff. of the linear interp.
it2 = it1 + 1
if(it1.lt.nt.and.it1.ge.1)
if(c.eq.’a’) m(iv,itau) =
if(c.eq.’f’) d(ih,it1) =
if(c.eq.’f’) d(ih,it2) =
endif
enddo
enddo
enddo
then
m(iv,itau)+(1.-a)*d(ih,it1)+a*d(ih,it2)
d(ih,it1)+(1.-a)*m(iv,itau)
d(ih,it2)+
a *m(iv,itau)
! end offset loop
! end velocity loop
! end tau loop
return
end
M.D.Sacchi / STMSSP
144
High Resolution Hyperbolic Radon Transf.
a b
We can contruct a solution m that consists on a few
isolated spikes in velocity space.
Minimize
J = ||Lm − d||22 + µ
X
ln(1 + m2k /b)
k
LT L m − L T d + Q m = 0
where Q is a diagonal matrix with elements given by
Qi =
2µ
b + m2i
It is clear that the system needs to be solved in an
iterative manner (Q depends on the unknown model m).
We can rewrite our solution as follows:
mk = (LT L + Qk−1 )−1 LT d .
a
Thorson, J. R., and Claerbout, J. F., 1985, Velocity-stack and slant stack
stochastic inversion: Geophysics, 50, 2727-2741.
b
Trad D., Ulrych J. and Sacchi M.D., 2003, Latest view of sparse Radon
transforms: Geophysics, 68, 386-399
M.D.Sacchi / STMSSP
145
Example: data set from the Gulf of Mexico
-1.4
Offset (ft)
-1.2
x10 4
-1.0
2
3
Time (s)
4
5
6
7
Figure 63: CMP gather # 1000 from a data set from the Gulf
of Mexico.
M.D.Sacchi / STMSSP
146
LS Hyperbolic Radon Transf.
4000
Velocity (ft/s)
6000
8000
2
3
Time (s)
4
5
6
7
Figure 64: Velocity panel obtained by inversion of the Hyperbolic Radon transform using least-squares. CMP gather # 1000
from a data set from the Gulf of Mexico.
M.D.Sacchi / STMSSP
147
High Resolution Hyperbolic Radon Transf.
4000
Velocity (ft/s)
6000
8000
2
Time (s)
3
4
5
6
7
Figure 65: Velocity panel obtained by inversion of the Hyperbolic Radon transform using sparse inversion. CMP gather #
1000 from a data set from the Gulf of Mexico.
M.D.Sacchi / STMSSP
148
Figure 66: Gulf of Mexico data set. Stack section before Demultiple.
M.D.Sacchi / STMSSP
149
Figure 67: Gulf of Mexico data set. Stack section after multiple
removal.
M.D.Sacchi / STMSSP
150
Sparseness in time − v and the wavelet
You might need to solve
LW m = d
Sparseness in time is not modelled by the operator L,
therefore, W (the wavelet) is needed to make the
algorithm more stable.
A small modification to the CGLS code is all that it is
needed:
LW = Convolve with wavelet, then model
W T LT = Apply the adjoint, then cross-correlate with the
wavelet
M.D.Sacchi / STMSSP
151
9
Fourier Interpolation
M.D.Sacchi / STMSSP
152
9.1
Interpolation
Iterpolation in Shot-Rec. coordinates (or Midpoint-Offset)
using the NU-DFT (NU: Non-uniform)
2D NU-DFT Interpolation:
−1
−1 N
X
1 MX
U (ks (m), kr (n), ω)ejks (m)xs ejkr (n)xr ,
u(xs , xr , ω) =
M N m=0 n=0
(39)
where xs and xr are the spatial variables along source and
receiver coordinates, ks and kr are the corresponding
wave-numbers. In matrix form:
u = AU
Amn =
1 jks (m)xs jkr (n)xr
,
e
e
MN
(40)
(41)
u and U denote the known data and unknown coefficients
of the DFT, respectively
J =k AU − u k22 +² k U k22
Û = (AT A + ²I)−1 AT u,
M.D.Sacchi / STMSSP
153
Band-Limited Signal Interpolation
a
Solutions like
Û = (AT A + DI)−1 AT u,
(42)
can include information about the spectral support of the
signal. The diagonal matrix D can be computed to
constraint wavenumbers not needed to reproduce the data.
Note the similarity with the High Res. Radon transform
where we exclude q-modes to achieve high resolution.
ks
k s,r
k r =f/Vmin
kr
fmax
f
f
k s =-f/Vmin
Figure 68: Region of support for Fourier interpolation.
a
Duijndam A.J.W., Schonewille M., and Hindriks K., 1999,Reconstruction of
seismic signals, irregularly sampled along on spatial coordinate: Geophysics, 64,
524-538.
M.D.Sacchi / STMSSP
154
Should we use sparse inversion in Fourier Interpolation ?
a b
• Here we have to be carefull. Fourier spectra is not
necesarilly sparse like the q-spectra in the parabolic
Radon transform.
• There are, however, cases where the sparse
assumption is valid. See the next example:
0.2
0.4
Time [s]
0.6
0.8
1
1.2
1.4
500
550
600
650
700
Depth [m]
750
800
850
Figure 69: Vertical seismic profile.
a
Sacchi, M.D., and Ulrych, T.J, 1996, Estimation of the discrete Fourier transform: a linear inversion approach: Geophysics, 61, 4, 1128-1136.
b
Sacchi, M.D., Ulrych, T.J, and Walker, C., 1998, Interpolation and extrapolation using a high resolution discrete Fourier transform: IEEE Trans. on Signal
Processing, 46, No. 1, 31-38.
M.D.Sacchi / STMSSP
155
Normalized frequency
0
0
0.05
−10
0.1
−20
0.15
−30
0.2
−40
0.25
−50
0.3
−60
0.35
−70
0.4
−80
0.45
−90
0.5
−0.5
−100
−0.4
−0.3
−0.2
−0.1
0
0.1
Normalized wavenumber
0.2
0.3
0.4
0.5
Db
Figure 70: VSP data: 2D periodogram or classical Fourier
spectrum.
Normalized frequency
0
0
0.05
−10
0.1
−20
0.15
−30
0.2
−40
0.25
−50
0.3
−60
0.35
−70
0.4
−80
0.45
−90
0.5
−0.5
−100
−0.4
−0.3
−0.2
−0.1
0
0.1
Normalized wavenumber
0.2
0.3
0.4
0.5
Db
Figure 71: VSP data: 2D high resolution spectrum using
sparse inversion (Cauchy norm)
M.D.Sacchi / STMSSP
156
Sparse Reconstruction of Fourier Spectra
(a)
2
1
0
−1
−2
0
20
40
60
80
100
(b)
120
140
160
180
200
0
20
40
60
80
100
(c)
120
140
160
180
200
0
20
40
60
80
100
Samples
120
140
160
180
200
2
1
0
−1
−2
2
1
0
−1
−2
Figure 72: (a) Input data (b) Reconstructed data (c) Error
(a)
Normalized Power
1
0.8
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
0.3
Normalized Frequency
0.35
0.4
0.45
0.5
0.35
0.4
0.45
0.5
(b)
Normalized Power
1
0.8
0.6
0.4
0.2
0
0
0.05
0.1
0.15
0.2
0.25
0.3
Normalized Frequency
Figure 73: (a) High resolution spectrum (b) Periodogram
M.D.Sacchi / STMSSP
157
9.2
Minimum weighted norm
interpolation
This is an alternative to sparseness and band-limited
constraints:a
Minimize
J = ||u −
AU ||22
Uk∗ Uk
+
2
k∈K Pk
X
where Pk is an inital estimate of the power spectrum of
the data, and K the wavenumber region where Pk 6= 0.
The problem is solved with the CG method and efficiency
can be gainned by using the FFT (after data binning)
rather the NU-DFT, in that case:
Minimize J = ||W (u −
AU )||22
Uk∗ Uk
+
2
k∈K Pk
X
W is used to penalize non-recorded data. Remark:
• Pk needed at frequency slice f is computed from the
solution at frequency f − ∆f (see, non-iterative
Radon Transform)
• Helps to mitigate alias since the weigths are derived
from the interpolation of the non-aliased low freq.
portion of the data.
a
Liu B., and Sacchi M.D., 2003, 2-D/3-D seismic wavefield reconstruction for
AVA imaging: 73rd Annual Mtg. Soc. Expl. Geophys., Expanded Abstracts, 4
pages, CDROM.
M.D.Sacchi / STMSSP
158
MWNI - Examples
(a)
3.0
-4800
-4600
-4400
-4200
-4000
Offset (m)
-3800 -3600
-3400
-3200
-3000
-2800
-4000
Offset (m)
-3800 -3600
-3400
-3200
-3000
-2800
3.2
Time (s)
3.4
3.6
3.8
4.0
4.2
4.4
(b)
3.0
-4800
-4600
-4400
-4200
3.2
Time (s)
3.4
3.6
3.8
4.0
4.2
4.4
Figure 74:
M.D.Sacchi / STMSSP
Before and After MWNI (Gap filling + resampling)
159
Marmousi s-r interpolation
3600
Source positions (m)
3500
3400
3300
3200
3100
Known
Unknown
3000
500
1000
1500
2000
Receiver positions (m)
2500
3000
3500
Figure 75:
Source and receiver position map where the x-mark indicates the
position of the available traces; the dots indicate the positions to be interpolated.
(a)
Trace Number
100
200
(b)
0
0
Trace Number
100
200
Time (s)
0
Time (s)
0
2
2
(c)
Trace Number
100
200
Time (s)
0
0
2
Figure 76:
(a) Decimated shot gathers at 3075 m, 3100 m and 3125 m. (b)
The reconstructed shot gathers. (c) The reconstruction error.
M.D.Sacchi / STMSSP
160