Introduction

Introduction
Chris Winstead
January 19, 2015
1. Time-varying signals
(a) Thevenin (voltage source w/series resistor)
(b) Norton (current source w/parallel resistor)
2. Units
(a) ω = 2 πf
(b) f is in Hz (cycles per second)
(c) ω is in radians per second.
(d) ω is “omega”, not w .
(e) A magnitude V in dB is 20 log
10
( V )
(f) A power P in dB is 10 log
10
( P ).
3. Spectrum of signals
(a) Time-domain = integral or summation over sinusoidal components v a
( t ) = V
A sin ( ωt + φ )
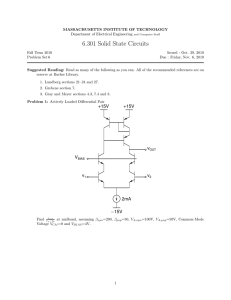
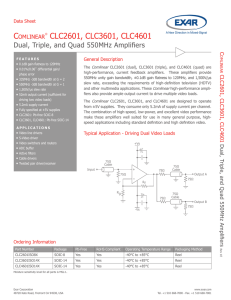
(b) Magnitude spectrum i. Spectrum of a pure sinusoid v s
( t ) = 100 sin (2 πf t + φ )
⇒
40
20
A sinusoid has a single
Fourier component that appears as an impulse function in the spectral representation.
0
10
2
10
ω (rad/sec)
4 ii. High-pass and low-pass RC circuits iii. Laplace-domain analysis, transfer functions iv. Magnitude of transfer function
| H ( jω ) |
2
= H ( jω ) × H
∗
( jω ) v. Short-cut analysis: for analyzing the steady-state magnitude response for sinusoids at a specific frequency ω , the cap C behaves like a resistor:
1 sC
1
≈
ωC
(Note that this doesn’t work for analyzing the phase response).
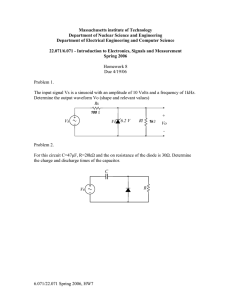
vi. Bode plots (see book appendix)
1
vii. Unity gain frequency w t
.
60
40
20
0
10
1
10
2
10
3
10
4 f (Hz)
10
5
10
6 f t
(c) Periodic signals have discrete-valued harmonics i. Aliasing in oscilliscope FFT display
• The Sec/Div knob sets the sampling rate f
S
.
• If the signal frequency f > f
S
/ 2, then the scope will show an image at f − f
S
/ 2.
So if you increase f beyond f
S
/ 2, the signal peak on the FFT will appear to move backwards .
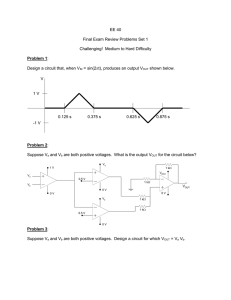
ii. Spurious harmonics arising from distortion. A sinusoid has a single frequency component at f
0
; a distorted sinusoid has harmonic components spaced at integer multiples f k
= kf
0
.
40
20
0
10
3
ω (rad/sec)
10
4
4. Amplifiers
(a) Gain: voltage, current
(b) Power gain: load power / input power
A
P
= v o i o v i i i
= A v
A i
(c) Small-signal concepts, signal convention i
C
( t ) = I
C
+ i c
( t )
(d) Circuit models for amplifiers i. Voltage amp ii. Current amp iii. Transconductance amp (v-in, i-out) iv. Transresistance amp (i-in, v-out
(e) Cascades of amplifiers – resistive coupling between R sig
, R in and between R out
, R
L
.
EXAMPLE: Linearization
A temperature sensor provides a change of 2mV per
◦
C, connected to a load of 10kΩ. The output changes by 10mV when T is changed by 10
◦
C. What is the source resistance of the sensor?
2
R
S
+ v s
+
−
R
L v
OUT
V
S
+
−
−
The sensor model is linearized: v s
= V
S
+ dv
S dT
∆ T
T
0 where T
0 is the reference temperature and ∆ T is the variation from that temperature. To consider only the variation in v
OUT
, we isolate the small signal portion: v out
= dv
S dT
T
0
∆ T
The problem statement tells us that dv
S dT
T
0
= 2mV/
◦
C
It also tells us that v out
= 10 mV, so we can solve for R
S
:
→
R
L v out
= v s
R
L
+ R
S
R
S
= (2 mV/
=
(2 mV/
◦
C) (10
◦
C) (10 v out
◦
C)
R
L
R
L
+ R
S
◦
C) R
L
− R
L
= 10 kΩ
EXAMPLE: Linearization
A thermistor is modeled by the Steinhart-Hart equation:
R = R
0 e
− B
1
T
0
−
1
T where R
0 and T
0 are reference measurements, T and T
0 are in Kelvin, and B is a device-specific parameter. For small temperature changes (e.g. changes in a room’s temperature), we can approximate this using a linearized model centered around T
0
:
R ≈ R
0
+ ∆ T d dT
R
0 e
− B
1
T
0
−
1
T
= R
0
+ ∆ T R
0 e
− B
1
T
0
−
1
T d dT
T = T
0
− B
= R
0
− ∆ T R
0
B
T
2
0
1
T
0
1
−
T
3
T = T
0
So if T
0
= 300 K , R
0
= 10 kΩ and B = 50 K
− 1
, then for temperatures near 300 K we have
R ≈ 10 kΩ − ∆ T × 5 .
5 Ω
So we should see a difference of about 5 .
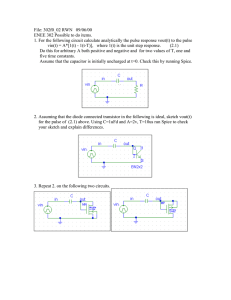
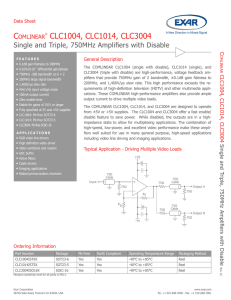
5 Ω/K. To check the accuracy of this approximation, we can compare the actual (nonlinear) equation to the linearized result:
1 .
02
· 10
4
Actual
Linearized
1 .
01
1
0 .
99
280 290 300
T (Kelvin)
310 320
Note that the accuracy is best for very small ∆ T , and the error begins to grow as | ∆ T | increases.
4