Multicommodity Flows in Polymatroidal Capacity Networks
advertisement

Multicommodity Flows in Polymatroidal Capacity
Networks
Chandra Chekuri, Sreeram Kannan, Adnan Raja and Pramod Viswanath
University of Illinois, Urbana-Champaign, IL 61801
Email: {chekuri,kannan1, araja2, pramodv}@illinois.edu
Abstract
A classical result in undirected edge-capaciated networks is the approximate optimality of routing (flow) for multiple-unicast: the min-cut upper bound is within a
logarithmic factor of the number of sources of the max flow [2, 3]. In this paper we
focus on extending this result to a more general network model, where there are joint
polymatroidal constraints on the rates of the edges that meet at a node.
For directed polymatroidal networks with symmetric demands we show that the
maximum concurrent flow is within O(log3 k) of the sparsest edge cut. We also show that
for bidirected polymatroidal networks (with general demands), the maximum concurrent
flow is within O(log3 k) of the sparsest edge cut. We finally show that the rate region
achievable by flows is within a factor of O(log3 k) of the rate region defined by the cut-set
bounds.
1
Introduction
Consider a communication network represented by a directed graph G = (V, E). In the
commonly studied scenario, each edge is labeled by a capacity, and the amount of information
flowing on that edge should not exceed the capacity of the edge. A classical result in undirected
edge-capaciated networks is the approximate optimality of routing (flow) for multiple-unicast:
the min-cut upper bound is within a logarithmic factor of the number of sources of the max
flow [2, 3].
In this paper we focus on extending this result to a more general network model, where
there are joint constraints on the rates of the edges that meet at a node. This network, which
we call as the polymatroidal network, was studied originally by Lawler and Martel [6], and is
closely related to the submodular flows model studied by Edmonds and Giles [5].
We study directed polymatroidal networks with symmetric demands, and establish that
the maximum concurrent flow is within O(log3 k) of the sparsest edge cut. This result is
based on an uncrossing argument and a directed tree representation of laminar families, using
which we connect the directed polymatroidal network problem to a directed edge-capacitated
problem for which a flow-cut approximation was established by [1].
1
Next, we study bidirected polymatroidal networks (with general demands), and establish
that the maximum concurrent flow is within O(log3 k) of the sparsest edge cut. We show that
a similar result holds for approximating the sparsest partitioned “cut-set” by the maximum
concurrent flow. We finally show that the rate region achievable by flows is within a factor of
O(log3 k) of the rate region defined by the cut-set bounds.
2
2.1
Flows and Cuts
Flows
Consider a communication network represented by a directed graph G = (V, E), and a set
S ⊆ V of k sources s1 , .., sk and a set T ⊆ V of k destinations t1 , .., tk . Source si wants to
send “commodity” i to destination ti . Without loss of generality, we can assume S and T are
non-overlapping, i.e., S ∩ T = φ. A flow of commodity i, is defined as a mapping fi : E → R+ ,
which satisfies the following conservation conditions:
X
X
fi (e) =
fi (e) ∀v ∈ V \{S ∪ T },
(1)
e∈In(v)
e∈Out(v)
Ri
:
X
=
fi (e) =
e∈Out(si )
X
fi (e).
(2)
e∈In(ti )
Here Ri is interpreted as the rate of commodity flow i.
The total flow over an edge e is defined as
f (e) :=
k
X
fi (e).
(3)
i=1
In polymatroidal capacity networks, we will require a flow to satisfy the following additional
conditions:
X
f (e) ≤ ρin
(4)
v (Sv ) ∀Sv ⊆ In{v}
e:e∈Sv
X
f (e) ≤ ρout
v (Sv ) ∀Sv ⊆ Out{v},
(5)
e:e∈Sv
out
where ρin
v (·) and ρv (·) are sub-modular functions on the corresponding input sets In{v} and
output set Out{v}.
A rate tuple (R1 , ..., Rk ) is said to be achievable if commodities 1 to k can be sent at rates
R1 ,...,Rk simultaneously between the corresponding source-destination pairs.
The maximum concurrent flow is defined as follows: each source-destination pair i has a
requested demand vector Di . The maximum concurrent flow is defined as the maximum value
of λ such that the rate tuple (λD1 , ..., λDk ) is achievable.
2
2.1.1
Network with symmetric demands
For a polymatroidal network with symmetric demands, node si intends to send commodity
i to ti and node ti intends to send commodity si at the same rate. Therefore, in the flow
conservation equations we have the following instead of (2):
X
X
Ri :=
fi (e) =
fi (e),
(6)
e∈Out(si )
Ri0 :=
Ri
=
X
e∈In(ti )
fi (e) =
e∈Out(ti )
Ri0
∀i
X
fi (e),
(7)
e∈In(si )
= 1 . . . k.
(8)
Here Ri is the rate of flow from si to ti and Ri0 is the rate of flow from ti to si .
The maximum concurrent flow is again defined as the maximum value of λ such that the
rate tuple (λD1 , ..., λDk ) is achievable.
Conceptually, this problem can be viewed as a regular maximum concurrent flow problem
with 2k sources, s1 , ..., sk , s01 , ..., s0k , where s0i = ti and corresponding destinations t1 , .., tk , t01 , ..., t0k
with t0i = si , and the symmetric rate constraints can be enforced by setting the demands as
(D1 , .., Dk , D1 , .., Dk ).
2.2
Cuts
Consider a directed network with polymatroidal constraints.
Definition 1. Partitioned edge cut A partitioned edge cut F is defined as a set of edges
F ⊆ E, along with a partition F = {F1 , ..., Fl } such that
F =
l
]
Fi ,
(9)
i=1
where in any given partition Fi , all edges share either the head or the tail, i.e.,
∀e ∈ Fi
∀e ∈ Fi .
head(e) = ui
or tail(e) = vi
The value of a partition F is given by
in
ρui (Fi ), if head(Fi ) = ui
ρ(Fi ) :=
.
ρout
if tail(Fi ) = vi
vi (Fi ),
(10)
(11)
(12)
We will use the similarly defined shorthand ρ(Ei ) to denote the capacity constraint on any
set of edges Ei that either share a head or a tail. Here the subscript v, and the superscript
“in” or “out” are suppressed, and can be understood from the argument Ei .
3
The value of a partitioned edge cut is then given by
l
X
v(F ) :=
ρ(Fi ).
(13)
i=1
A source-destination pair i is said to be disconnected by a partitioned edge cut if
p ∩ F 6= φ
∀p ∈ P(si ,ti ) ,
(14)
where P(si ,ti ) is the set of paths from si to ti . Set di = 1 if (si , ti ) is disconnected by the edge
cut, otherwise set di = 0.
The sparsity of a partitioned edge cut F is defined as
v(F )
u(F) = P
.
i di Di
(15)
The “sparsest partitioned edge cut” problem is to find the partitioned edge cut with minimum
sparsity,
F ∗ = arg minF s(F).
(16)
Given a partitioned edge cut, the total rate of the disconnected (si , ti ) pairs is upper
bounded by the value of the partitioned edge cut,
X
di Ri ≤ v(F ).
(17)
i
For the concurrent flow problem, Ri = λDi , and we get
v(F )
λ≤ P
= s(F).
i di Di
(18)
We can summarize this as the following.
Lemma 1. The value of the maximum concurrent flow is upper bounded by the value of the
sparsest partitioned edge cut.
2.2.1
Network with symmetric demands
For a network with symmetric demands, the sparsest partitioned edge cut can be defined as
follows. Given a partitioned edge cut F, if (si , ti ) is disconnected, then set di = 1, if not, set
di = 0 (as before), now additionally define d0i = 1 if (ti , si ) is disconnected, if not, set d0i = 0.
The sparsity of the partitioned edge cut can be given as
s(F) = P
v(F)
.
0
i (di + di )Di
(19)
We can view the sparsest edge cut problem in the network with symmetric demands as
a special case of a general network problem with 2k sources and 2k destinations as done in
Sec. 2.1.1 to show the following lemma:
Lemma 2. For a network with symmetric demands, the value of the maximum concurrent
flow is upper bounded by the value of the sparsest partitioned edge cut.
4
3
Main Result: Max Concurrent Flow to Sparsest Partitioned Edge Cut Ratio
Theorem 1. For a directed network with polymatroidal constraints, with k source-destination
pairs, and symmetric demands from sk to tk and tk to sk , the ratio between the sparsest
partitioned edge cut and the maximum concurrent flow is O(log3 k).
Proof. The proof can be outlined as follows.
• We begin with the observation that max concurrent flow is a linear optimization program.
This allows us to write the dual of this program.
• We analyze the properties of the optimal solution set of the dual-of-flow program, and
show that only constraints corresponding to a certain laminar family are active.
• Next, we obtain a “tree representation” for a node having a laminar family of constraints
on the input.
• We then use the tree representation to construct an edge-capacitated network for which
the dual of concurrent flow problem with symmetric demands corresponds exactly to
P̃fd.s. .
• We proceed to show that the flow and edge-cut in the constructed edge-capacitated
network are related to the flow and cut of the original polymatroidal network.
• Finally, we use existing results [1] to obtain an edge-cut in the wireline network whose
sparsity which is within O(log3 k) of the maximum concurrent flow.
This completes the proof. In the following, we formally derive the steps involved in the proof
of our main result.
3.1
Flow Optimization Problem
We begin by writing the optimization problem for the maximum concurrent flow in directed
network with symmetric demands.
For a path p ∈ P(si ,ti ) , we will use the variable f (p) to denote the amount of flow from si
to ti through the path p. The end points of the path p uniquely specify si and ti . The max
5
concurrent flow problem can now be written mathematically as
X
max
λ
(20)
s.t.
f (p) ≥
λDi , ∀i
(21)
p∈P(si ,ti )
X X
f (p)
≤
ρin
v (Sv ) ∀Sv ⊆ In(v) ∀v
(22)
f (p)
≤
ρout
v (Sv ) ∀Sv ⊆ Out(v) ∀v
(23)
f (p)
=
e:e∈Sv p:e∈p
X X
e:e∈Sv p:e∈p
X
p∈P(si ,ti )
f (p) ∀i
(24)
p∈P(ti ,si )
f (p)
3.1.1
X
≥
0 ∀p.
(25)
Dual of Flow
We now write the dual of the flow linear program to shed some insight on the structure of the
optimal flow, and its connection to the cut.
out
Let the dual variables be li , din
v (Sv ), dv (Sv ), mi corresponding to the constraints (21), (22),
(23) and (24) respectively.
min
X X
in
din
v (Sv )ρv (Sv ) +
v∈V Sv ⊆In(v)
X
X
out
dout
v (Sv )ρv (Sv )
(26)
v∈V Sv ⊆Out(v)
X
li Di
s.t.
≥ 1
(27)
≥
li ∀p ∈ P(si ,ti ) ∀i
(28)
≥
0 ∀p0 ∈ P(ti ,si ) ∀i
(29)
≥
≥
0 ∀v ∈ V ∀Sv ⊆ In(v) (30)
0 ∀v ∈ V ∀Sv ⊆ Out(v).(31)
i
X
X
X
out
din
(S
)
+
d
(S
)
+ mi
v
v
v
v
e:e∈p
Sv ⊆In(v):e∈Sv
Sv ⊆Out(v):e∈Sv
X
X
X
out
− mi
din
(S
)
+
d
(S
)
v
v
v
v
0
e:e∈p
Sv ⊆In(v):e∈Sv
Sv ⊆Out(v):e∈Sv
din
v (Sv )
dout
v (Sv )
Now, we can use the fact that
ai + mi ≥ li and bi − mi ≥ 0
⇐⇒ ai + bi ≥ li ,
6
(32)
(33)
if mi is not constrained in sign, in order to simplify the equations (28) and (29) into a single
equation. This gives us the equivalent program
min
X X
X
in
din
v (Sv )ρv (Sv ) +
X
out
dout
v (Sv )ρv (Sv )
(34)
v∈V Sv ⊆Out(v)
v∈V Sv ⊆In(v)
X
s.t.
≥ 1
li Di
(35)
i
X
X
{
din
v (Sv )
+
e:e∈p Sv ⊆In(v):e∈Sv
X
{
X
dout
v (Sv )}+
Sv ⊆Out(v):e∈Sv
X
X
din
v (Sv ) +
e:e∈p0 Sv ⊆In(v):e∈Sv
dout
v (Sv )}
≥
li ∀p ∈ P(si ,ti ) , p0 ∈ P(ti ,si ) ∀i(36)
din
v (Sv )
out
dv (Sv )
≥
≥
0 ∀v ∈ V ∀Sv ⊆ In(v)
0 ∀v ∈ V ∀Sv ⊆ Out(v).
(37)
(38)
dout
v (Sv ).
(39)
Sv ⊆Out(v):e∈Sv
Let us define
X
d(e) :=
X
din
v (Sv ) +
Sv ⊆In(v):e∈Sv
Sv ⊆Out(v):e∈Sv
Then the constraint (36) becomes,
X
min0
p∈P(si ,ti ) ,p ∈P(ti ,si )
⇐⇒
min
p∈P(si ,ti )
X
X
d(e) ≥ li
(40)
d(e) ≥ li .
(41)
e:e∈p0
e:e∈p
d(e) +
e:e∈p
d(e) +
min
p0 ∈P(ti ,si )
X
e:e∈p0
The dual-of-flow program can now be written as
min
X X
in
din
v (Sv )ρv (Sv ) +
X
X
out
dout
v (Sv )ρv (Sv )
(42)
v∈V Sv ⊆Out(v)
v∈V Sv ⊆In(v)
X
li Di
s.t.
≥ 1
(43)
i
X
X
din
v (Sv ) +
Sv ⊆In(v):e∈Sv
min
p∈P(si ,ti )
dout
v (Sv ) =: d(e)
(44)
X
Sv ⊆Out(v):e∈Sv
X
e:e∈p
d(e) +
min
p0 ∈P(ti ,si )
d(e)
≥
li
(45)
din
v (Sv )
out
dv (Sv )
≥
≥
0 ∀v ∈ V ∀Sv ⊆ In(v)
0 ∀v ∈ V ∀Sv ⊆ Out(v).
(46)
(47)
e:e∈p0
The feasibility of this program depends only on the value of d(e), and not on the finer
out
specification of the values of din
v (·) and dv (·).
7
3.2
Properties of the Dual of Flow program
Lemma 3. There exists an optimal solution such that ∀v, {Sv : din
v (Sv ) > 0} is a laminar
out
family; and ∀v, {Sv : dv (Sv ) > 0} is also a laminar family.
out
Proof. Among all the din
v (·), dv (·) which are feasible and have the same optimal objective
out
function value in the dual of flow program, choose din
v (·), dv (·) such that
X X
X X
(48)
din
dout
v (Sv ) · |Sv | · |In(v) \ Sv | +
v (Sv ) · |Sv | · |Out(v) \ Sv |,
v
v
Sv ∈In(v)
Sv ∈Out(v)
is minimized.
out
in
We will show that such a dv (·) the set Fvin := {Sv : din
v (Sv ) > 0} and Fv := {Sv : dv (Sv ) >
in
0} should be laminar for every v. Suppose not, let Fv be non-laminar for a specific v. We
0
will now show that there exists a dvin which is feasible, the objective function is no greater
and the value of
X 0
(49)
dvin (Sv ) · |Sv | · |In(v) \ Sv |,
Sv ∈In(v)
is strictly less than that of din
v .
By assumption of non-laminarity of Fvin , there exists A, B ∈ Fvin such that A∩B 6=, A 6⊆ B
in
and B 6⊆ A. Let, without loss of generality, din
v (A) ≥ dv (B) > 0.
Define
0
dvin (A)
0
dvin (B)
0
dvin (A ∩ B)
0
dvin (A ∪ B)
:=
:=
:=
:=
in
din
v (A) − dv (B)
in
din
v (B) − dv (B) = 0
in
din
v (A ∩ B) + dv (B)
in
din
v (A ∪ B) + dv (B),
(50)
(51)
(52)
(53)
0
and for the other sets dvin (C) = din
v (C).
0
Claim: dvin (·) is feasible. In particular d(e) = d0 (e), ∀e.
Proof: It is sufficient to show that
X
X
0
dvin (Sv ).
din
v (Sv ) =
Sv ⊆In(v):e∈Sv
(54)
Sv ⊆In(v):e∈Sv
This implies that d(e) = d0 (e), which in turn implies that the feasibility of the constraints are
unaltered.
Case 1: Let e ∈ A, e 6∈ B, then e ∈ A ∪ B, e 6∈ A ∩ B. Now (54) is true, since,
0
0
in
in
in
din
v (A) + dv (A ∪ B) = dv (A) + dv (A ∪ B).
(55)
Case 2: Let e ∈ A, e ∈ B. Now (54) is true since,
0
0
0
0
in
in
in
in
in
in
in
din
v (A) + dv (B) + dv (A ∩ B) + dv (A ∪ B) = dv (A) + dv (B) + dv (A ∩ B) + dv (A ∪ B).(56)
8
0
Claim: dvin has objective function value lesser than or equal to that of din
v .
0
is
Proof: The difference in the objective function of dvin to that of din
v
0
0
in
in
in
in
in
ρin
v (A)(dv (A) − dv (A)) + ρv (B)(dv (B) − dv (B))
0 in
0 in
in
in
in
+ρin
v (A ∪ B)(dv (A ∪ B) − dv (A ∪ B)) + ρv (A ∩ B)(dv (A ∩ B) − dv (A ∩ B))
in
in
in
in
in
in
in
= ρin
v (A)(−dv (B)) + ρv (B)(−dv (B)) + ρv (A ∪ B)(dv (B)) + ρv (A ∩ B)(dv (B))
in
in
in
in
= −din
v (B)(ρv (A) + ρv (B) − ρv (A ∩ B) + ρv (A ∪ B)
≤ 0,
by the submodularity of ρin
v .
Claim:
X 0
X
dvin (Sv )|Sv ||In(v) \ Sv | <
din
v (Sv )|Sv ||In(v) \ Sv |.
Sv ∈In(v)
(57)
(58)
(59)
(60)
(61)
(62)
Sv ∈In(v)
Proof: Let us recall the following lemma (Chapter 2, Theorem 2.1 in [4]):
Lemma 4. [4] If T and U are subsets of a set S with T 6⊆ U and U 6⊆ T , then
|T ||S \ T | + |U ||S \ U | > |T ∩ U ||S \ (T ∩ U )| + |T ∪ U ||S \ (T ∪ U )|.
(63)
The difference between the two terms is
X
0
(dvin (Sv ) − din
v (Sv ))|Sv ||In(v) \ Sv |(64)
Sv ∈In(v)
=
−din
v (B){|A||In(v)
\ A| + |B||In(v) \ B| − |A ∪ B||In(v) \ A ∪ B||A ∩ B||In(v) \ A ∩ B|}(65)
< 0,(66)
where (66) follows from Lemma 4.
This is a contradiction to the assumption that din
v (·) has the minimum value of
X
din
v (Sv )|Sv ||In(v) \ Sv |,
(67)
Sv ∈In(v)
among all functions that are feasible and have the same optimal objective function value in
the dual of flow program.
This completes the proof of the lemma.
3.2.1
Reduced Flow Program
The optimal solution of Pfd.s. has the structure that for any given v, only for Sv ∈ Fvin ,
in
out
in
in
din
v (Sv ) > 0 and similarly only for Sv ∈ Fv , dv (Sv ) > 0, where Fv and Fv are laminar
families. Let us call this set Ξ, which is the union of the incoming and outgoing laminar
families for all the sets. Therefore even if we add the constraint that
dv (Sv ) = 0, Sv 6∈ Ξ,
(68)
the value of the program Pfd.s. is unchanged. This is equivalent to a flow problem, where,
in
node v has a laminar polymatroidal constraint ρin
v (Ev ), Ev ∈ Fv on its incoming edges and a
out
in
laminar polymatroidal constraint ρv (Ev ), Ev ∈ Fv on the outgoing edges.
Let us call this program with additional constraints as P̃fd.s. .
9
1
ߩ(1)
2
ߩ(2)
3
ߩ(3)
12
1234
34
4
ߩ(12)
ߩ(4)
ߩ(1234)
ߩ(34)
v
ߩ(5)
5
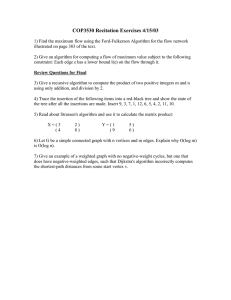
Figure 1: Directed Tree corresponding to Laminar Family
3.3
A Tree Representation for the Laminar Constraints
in
in
Consider a node v having incoming constraints ρin
v (Ev ), Ev ∈ Fv , where Fv is a laminar
family of constraints.
The connection between laminar family of sets and trees is well known and was developed
by Edmonds and Giles [5]. For the discussion in this paper, it will be convenient to have an
explicit construction of an edge-capacitated directed tree corresponding to a node’s incoming
laminar constraints, and this will be developed here.
If the singleton subsets {e1 }, ..., {el } of In(v) are not already present in Fvin , let us add
them to the laminar family. This does not affect the laminarity of Fvin .
Let us construct a graph with nodes vE , E ∈ Fvin and the node v. Let the set of edges in
this graph be T , and add the edges
(vE1 , vE2 ) ∈ T if E1 ⊂ E2 , and E2 is the minimal such set in Fvin ,
(69)
with the capacity of the edge given by
c(vE1 ,vE2 ) := ρ(E1 ),
(70)
(vE1 , v) ∈ T if E1 is maximal in Fvin ,
(71)
c(vE1 ,v) := ρ(E1 ),
(72)
and the edge is labeled eE1 .
Further add the edges
with capacity
and these edges are labeled eE1 .
This completes the definition of a directed graph (V, T ). We will now show that it is a tree.
Since any edge connects a set of smaller cardinality to an edge of larger cardinality, the graph
is acyclic. Since each node has only one outgoing edge, the acyclic graph is a directed tree.
10
Note that since the graph is a tree there is a unique path from any node vE1 to v, denoted by
pE1 ,v comprised of the edges {eEv : E1 ⊆ Ev ∈ Fvin }.
Example: Consider a node that has incoming polymatroidal constraints on e5 , e12 , e34 , e1234
given by ρ5 , ρ12 , ρ34 , ρ1234 respectively. For this example, the directed network is shown in
Fig. 1.
3.4
Procedure Constructing an Edge-Capacitated Network
• Each node v in the original network has a laminar polymatroidal constraint ρin
v (Ev ), Ev ∈
out
in
Fv on its incoming edges and a laminar polymatroidal constraint ρv (Ev ), Ev ∈ Fvin on
the outgoing edges.
• Since this is a directed network, we can think of all the incoming edges being grouped
together (say, on the left side), and all the outgoing edges grouped together (on the
right side). On the incoming side, the node v is supplemented by |Fvin | nodes, named
vEv , Ev ∈ Fvin using the directed tree representation of Sec 3.3. Similarly on the outgoing
side, the node v is supplemented by |Fvin | nodes, named vEv , Ev ∈ Fvin using the directed
tree representation of Sec 3.3 with the edges reversed. Thus, each node v is replaced by
|Fvin | + 1 + |Fvin | nodes.
• Now we need to specify how the connections between various nodes are made in the new
network. An edge ei = (u, v) in the polymatroidal network is now represented twice in
the polymatroidal network once in the incoming tree representation for v, and once in
the outgoing tree representation for u. There are corresponding nodes vei and uei . We
will now collapse these two nodes into a single node.
• There is a one-to-one correspondence between the paths in the original network and
the constructed network. Corresponding to any edge e coming into a node v in a path
in the polymatroidal network, we can identify a path in the edge-capacitated network
by using the unique path p{e},v in the tree representation. Doing this for every edge in
the path gives us a corresponding path in the edge-capacitated network. On the other
hand, given any path composed of eEi , i = 1, 2, ..., l in the edge-capacitated network,
taking the edges in the union of these sets ∪i Ei , we can construct a path in the original
network.
3.5
Relationship between flows and cuts in original and constructed
network
Let the flow value in the constructed edge-capacitated network be given by Pfn .
Lemma 5. The flow value in the constructed edge-capacitated network is identical to the flow
value in the original polymatroidal network:
Pfn = Pfd.s. .
11
(73)
Proof. We already know that Pfd.s. = P̃fd.s. , i.e., we can consider a network with laminar
constraints corresponding to Ξ instead of considering all the polymatroidal constraints.
Let the edges in the edge capacitated network be denoted by ẽ and the dual variable
constraining ce be denoted as d˜e .
The dual of the maximum concurrent flow for the edge capacitated network with symmetric
demands is given by,
min
X
d˜ẽ cẽ
(74)
ẽ
X
s.t.
≥ 1
(75)
d˜ẽ
≥
li
(76)
d˜ẽ
≥
0 ∀v ∈ V ∀ẽ.
(77)
li Di
i
min
p∈P̃(si ,ti )
X
d˜ẽ +
ẽ:ẽ∈p
X
min
p0 ∈P̃(ti ,si )
ẽ:ẽ∈p0
Any edge ẽ can be represented as eEv for some Ev ∈ Fvin or Ev ∈ Fvin in the original
network, and the capacity of this edge is given by ρ(Ev ). Using the one-to-one correspondence
between paths in the polymatroidal and edge-capacitated network, we can see that any path
p ∈ P(si ,ti ) in the polymatroidal network can be represented in the edge capacitated network
by replacing edge edge e = (u, v) ∈ p with {Ev ∈ Fvin , Eu ∈ Fuout }. We can further substitute
d˜ẽ by d˜Ev if ẽ = eEv , to rewrite the program as
X
min
X
d˜Ev ρin
v (Ev ) +
Ev :Ev ∈F vin
d˜Ev ρout
v (Ev )
(78)
Ev :Ev ∈F vout
X
li Di
s.t.
≥ 1
(79)
i
X
X
{
e:e∈p Sv ∈Fvin :e∈Sv
X
{
X
d˜in
v (Sv ) +
X
e:e∈p0 Sv ∈Fvin :e∈Sv
d˜out
v (Sv )}+
Sv ∈Fvin :e∈Sv
d˜in
v (Sv ) +
X
d˜out
v (Sv )}
≥
lk ∀p ∈ P(si ,ti ) , p0 ∈ P(ti ,si ) ∀k(80)
d˜in
v (Sv )
out
˜
dv (Sv )
≥
≥
0 ∀v ∈ V ∀Sv ∈ Fvin
0 ∀v ∈ V ∀Sv ∈ Fvin .
Sv ∈Fvin :e∈Sv
(81)
(82)
This program Pfn is identical to the program P̃fd.s. , and therefore
Pfn = P̃fd.s. = Pfd.s. .
12
(83)
Lemma 6. Any edge cut in the edge-capacitated network specifies a partitioned edge-cut in
the polymatroidal network of the same sparsity. Therefore,
d.s.
n
Pe.c.
≤ Pe.c.
.
(84)
Proof. Each edge cut E in the edge-capacitated network specifies a set of edges eEi , i = 1, 2, .., l
where each edge eEi corresponds to some directed tree representation of the laminar constraints. The value of the edge cut in the edge-capacitated network
P is given
P as the sum of the
edge capacities, therefore the value of the specified edge cut is i cEi = i ρ(Ei ).
Now we can define a partitioned edge cut in the polymatroidal network as
F = {F1 , F2 , ...Fl }, where Fi := Ei , i = 1, 2, ..., l.
The value of the partitioned edge cut is given by
X
X
v(F) =
ρ(Fi ) =
ρ(Ei ),
i
(85)
(86)
i
which is the value of the edge cut in the edge-capacitated network.
We now claim that the set of source-destination pairs disconnected by the edge cut E in
the edge-capacitated network is the same as the set of source-destination pairs disconnected
by the partitioned edge cut F in the polymatroidal network. Consider the contrapositive of
this statement: “If there is a path between some (si , ti ) pair in the polymatroidal network
after removing the edges specified by F, then there is a path between the same (si , ti ) pair
in the edge-capacitated network after removing the edges specified by eEi .” This statement
can be shown easily by considering the one-to-one correspondence between the paths in the
polymatroidal and edge capacitated network
Since the value of the edge cut E is equal to the value of the partitioned edge cut F, and
the sum of the demands disconnected is the same in the case of the edge-capacitated network
and the polymatroidal network, it follows that the sparsity of the edge cut E is the same as
the sparsity of the partitioned edge cut F.
Now, we can use the existing result to connect the flow and cuts in the edge-capacitated
network:
Theorem 2. [1] For a directed edge-capacitated network, with k source-destination pairs, and
symmetric demands from sk to tk and tk to sk , the ratio between the sparsest edge cut and the
maximum concurrent flow is O(log3 k).
This implies that
Pfn
1
≥
.
n
Pe.c.
O(log3 k)
(87)
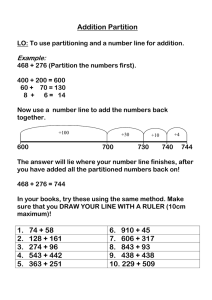
Combining this with the earlier equations relating the original and new networks (83),
(84), which are summarized in Fig. 2, we get that
d.s.
Pe.c.
d.s.
≤ Pfd.s. ≤ Pe.c.
,
O(log3 k)
which concludes the proof of the theorem.
13
(88)
≤
ௗ.௦.
࣪..
=
≥
࣪ௗ.௦.
࣪
≥
࣪
1
O(log ଷ ݇)
Figure 2: Relationship between flows and cuts of new and original networks
4
Bidirected Polymatroidal Networks with General Demands
In this section, we show that if the network is bi-directed, then the assumption of symmetric
demands can be relaxed. We begin by defining bidirected polymatroidal networks.
A bi-directed edge-capacitated network is a directed edge-capacitated where, for every
edge (i, j) there is a corresponding reverse edge (j, i) such that c(i, j) = c(j, i).
A bi-directed polymatroidal network is a directed polymatroidal network in which
• Every edge e = (i, j) has a corresponding reverse edge τ (e) := (j, i).
• For any vertex v, the polymatroidal constraint ρin
v (.) on the incoming edges In(v) is
(.)
on
the outgoing edges Out(v). More
the same as the polymatroidal constraint ρout
v
concretely,
out
ρin
v (Ev ) = ρv (τ (Ev )) =: ρv (Ev ) =: ρv (τ (Ev )).
(89)
Theorem 3. For a bidirected network with polymatroidal constraints, with k source-destination
pairs, the ratio between the sparsest partitioned edge cut and the maximum concurrent flow is
O(log3 k).
Proof. Let us consider a bi-directed polymatroidal network, with k specified sources s1 , ..., sk
and the k corresponding destinations t1 , ..., tk . In the problem with general demands, the
flow requirements is Di between si to ti , and the flow requirement between ti to si is zero.
However, in order to tackle this problem, we consider the problem with symmetric demands,
where both si wants to send Di flow to ti and symmetrically ti wants to send Di flow to si .
Let us call the maximum concurrent flow for the bi-directed problem with symmetric
b.s.
demands as as Pfb.s. and the sparsest partitioned edge-cut as Pe.c.
. Similarly, let us call the
maximum concurrent flow achievable for the bi-directed problem with general demands as
b.g.
Pfb.g. and the sparsest edge cut as Pe.c.
.
For a bi-directed polymatroidal network with symmetric demands, the gap between max
concurrent flow and the sparsest partitioned edge-cut is a special case of Theorem 1. Therefore
Pfb.s. ⊇
b.s.
Pe.c.
.
O(log3 k)
14
(90)
Clearly, any rate achievable with symmetric demands is also achievable with general demands, since the former is a harder problem. So
Pfb.s. ⊆ Pfb.g. .
(91)
Now we will consider a partitioned edge cut with symmetric demands. This would in
general disconnect either a path from si to ti or a path from ti to si , for any given i or
disconnect both. For the general demands problem, the obtained edge cut should disconnect
paths from si to ti , ∀i. The edge-cuts of the symmetric and general demands problems are
connected in the following lemma:
Lemma 7. Given a partitioned edge-cut for the problem with symmetric demands, there exists
a partitioned edge cut for the general demands problem, whose sparsity is atmost a factor of
4 bigger than the sparsity of the cut for the symmetric demands problem.
Proof. Let us start with a partitioned edge-cut F, recall that this need not disconnect all
source-destination pairs. We can make this edge-cut F bi-directed by adding the reverse
edges that are not already present τ (F) \ F to this edge-cut, let us call this bidirected edge
cut as F b.g. ,
F b.g. = F ∪ {τ (F) \ F},
v(F b.g. ) = v(F) + v{τ (F) \ F},
≤ v(F) + v(τ (F)),
= 2v(F).
(92)
(93)
(94)
(95)
Thus the value of the obtained edge cut could atmost increase the cut value by a factor of
two.
Claim: If the original edge cut disconnects paths from ti to si for i = 1, 2, ..., l, then the
bidirected edge cut F b.g. disconnects all paths from si to ti and all paths from ti to si for all
i = 1, 2, ..., l.
Proof: We will show that if an edge cut F disconnects paths from ti to si for all i, then
the edge cut τ (F) will disconnect paths from ti to si . This will then imply that F ∪ τ (F) will
disconnect both si to ti and ti to si , and prove the claim. We will show the contrapositive of
the requisite statement: If there is a path from some ti to si among edges τ F c , then there is a
path from si to ti among edges F c for the same i. Indeed this is true, since, if there is a path
from s to t among edges A, then there is a path from t to s among edges τ (A), and the fact
that
τ (τ F c ) = τ (τ (F c )) = F c ,
(96)
where we have used the fact for a set of edges the complement and τ operators commute.
Now we are ready to prove the statement of the lemma. Let the given partitioned edge
cut,for i = 1, 2, .., l, disconnect either paths from si to ti (given by di = 1) or ti to si (given
by d0i = 1) or both. The sparsity of the edge cut is given by
s(F) = Pl
v(F)
i=1 (di
15
+ d0i )Di
(97)
≤
1
4
≥
࣪.௦.
..
࣪..
≥
..
࣪
.௦.
≥
࣪..
1
O(log ଷ ݇)
Figure 3: Relationship between general demands and symmetric demands problems
Now the sparsity of the partitioned bidirected edge cut for the general demands problem
is
v(F b.g. )
s(F b.g. ) = Pl
i=1 Di
v(F)
≤ 2 Pl
i=1 Di
v(F)
= 2s(F),
≤ 4 Pl
0
(d
+
d
)D
i
i
i
i=1
(98)
(99)
(100)
since di + d0i ≤ 2. Thus the sparsity of the obtained partitioned edge cut for the general demands problem is atmost four times the sparsity of the partitioned edge cut for the symmetric
problem.
Now we relate the various variables in the problem in Fig. 3. This leads to the following
relationship,
b.g.
Pe.c.
b.g.
≤ Pfb.g. ≤ Pe.c.
,
O(log3 k)
(101)
which concludes the proof of the theorem.
4.1
Approximating Sparsest Partitioned Cut-set by Maximum Concurrent Flow
For a bidirected polymatroidal network with general demands, we proved that the sparsest
partitioned edge cut is approximated by the maximum concurrent flow. In this section, we
will connect the sparsest partitioned edge cut to the sparsest edge-partitioned “cut-set”.
A cut-set is a partition of the vertices into two sets Ω and Ωc . The edges corresponding to
the partition are given by
E(Ω) = {e = (u, v) : u ∈ Ω, v ∈ Ωc }.
16
(102)
An edge-partitioned cut-set is given by a partition of the edges E(Ω) into subsets Ei such that
all edges in any subset has either a common head or a common tail. Thus an edge-partitioned
cut-set is a special type of partitioned edge cut where the set of edges F = E(Ω) for some
Ω. The sparsity
U of the edge-partitioned cut-set is defined as the sparsity of the partitioned
edge cut E = i Ei , and this is a bound on the maximum concurrent flow λ. Note that an
edge-partitioned cut-set is, by definition, directional in that only edges going from Ω to Ωc
are included in the edge cut.
We are now ready to show the relationship between sparsest partitioned edge cut, and the
sparsest edge-partitioned cut-set.
Lemma 8. Given a partitioned bidirected edge cut for a bidirected polymatroidal network,
we can obtain an edge-partitioned cut-set whose sparsity is atmost 4 times the sparsity of the
partitioned edge cut.
Proof. Let λ be the maximum concurrent flow rate. Let the given edge cut be F. Since the
edge cut is bidirected, the graph obtained after removing the edge cut is also bidirected. We
can treat the graph as an undirected graph, and let us we partition the edges into sets falling
in the same connected component. This induces a natural “vertex multi-partition”, V = ∪i Vi ,
and let us define the edge cut corresponding to a vertex multi-partition as
E(∪i Vi ) := {e = (u, v) : u ∈ Vl , v ∈ Vm , l 6= m.
(103)
Let us call the partitioned edge cut corresponding to the multi-partition as Fm . The
demand separated by Fm is the same as the demands separated by F, and the value of Fm is
lesser than or equal to the value of Fm since Fm ⊆ F . Therefore the sparsity of Fm is lesser
than or equal to the sparsity of the partitioned edge cut F, i.e.,
s(Fm ) ≤ s(F).
For a given vertex multi-partition, let us define
X
Dij =
Dm ,
(104)
(105)
m:sm ∈Vi ,tm ∈Vj
be the sum of demands between sources in Vi and destinations in Vj . Clearly, some of the
Dij can be zero. Thus the original demands Di are relabeled according to the vertex multipartition.
In this terminology, the vertex multi-partition bound suggests a bound on the maximum
concurrent flow,
X
λ
Dij ≤ v(Fm ),
(106)
(i,j)∈[l]×[l]
since the edges corresponding to the vertex multi-partition disconnect all these source destination pairs.
Note that the cut-set differs from vertex bi-partition (special case of vertex multi-partition
with 2 partitions) in the sense that in a vertex bi-partition, the edges going from V1 to V2 = V1c
and the edges from V1c to V1 are both included in the cut, whereas in a cut-set given by a set
V1 , only the edges going from V1 to V1c are included.
17
4.1.1
The Averaged Edge-Partitioned Cut-Set Bound
We will compute the average bound implied by several cut-set bounds, which will indicate
that one of the cut-sets will be at least as strong as the average.
Let us take a set R which is a subset of {1, 2, ..., l}. Let us define a set
Ω(R) := {∪i∈R Vi },
(107)
and observe that EΩ(R) is a subset of Fm . Let us consider the partitioned cut-set termed FΩ(R)
induced by choosing the partition induced on this subset of edges EΩ(R) by the partition on
Fm by Fm . Thus we restrict ourselves to choosing the cut-set and then partition the edges in
the same way they were partitioned in Fm .
This cut-set separates a set of demands,
DΩ(R) = {(i, j) : i ∈ R, j ∈ Rc },
(108)
and implies the following bound on the maximum concurrent flow,
X
λ{
Dij } ≤ v(FΩ )
(109)
(i,j)∈SΩ(R)
⇒ λ{
X
Dij } ≤ v(Fm ),
(110)
(i,j)∈SΩ(R)
since v(FΩ ) ≤ v(Fm .
Now let us average the cut-set bound Ω(R) over subsets R of {1, 2, ..., l} of size 2l . The
l
total number of such subsets is l/2
.
This will imply the following bound,
X
X
l
Dij } ≤
v(Fm ).
(111)
λ{
l/2
l
R⊆[l]:|R|= 2 (i,j)∈SΩ(R)
The term inside the brackets in the LHS can be rewritten as
X
{No. of cuts that each demand appears in
Dij },
(112)
(i,j)∈[l]×[l]
Now this term can be further simplified using the equation,
{No. of cuts per demand} × { No. of demands} = { No. of demands per cut}{ No. of cuts}
(113)
2 l
l
⇐⇒ {No. of cuts per demand}l2 =
.
(114)
2
l/2
Substituting this in the averaged cut-set bound (111), we get,
2 X
l
l
l
2
λ{
Dij } ≤ l
v(Fm )
2
l/2
l/2
(i,j)∈[l]×[l]
X
⇒λ
Dij ≤ 4v(Fm ).
(i,j)∈[l]×[l]
18
(115)
(116)
Comparing this with (106),we can see that the averaged cut-set bound presents an upper
bound on λ at most four times larger than that of the corresponding vertex multi-partition
bound, which is itself smaller than the original partitioned bidirected edge cut bound.
This implies that there exists an edge-partitioned cut-set, for which the sparsity is at most
four times the sparsity of the given partitioned bidirected edge cut.
The following theorem follows immediately from Theorem 3 and Lemma 8:
Theorem 4. For a bidirected network with polymatroidal constraints, with k source-destination
pairs, the ratio between the sparsest edge-partitioned cut-set and the maximum concurrent flow
is O(log3 k).
4.2
Connection between Rate Regions
Since, for every value of demands D1 , ..., Dk , the maximum concurrent flow is within a factor
O(log3 k) of the edge-partitioned cut-set bound, the following result follows:
Theorem 5. For a bidirected network with polymatroidal constraints, with k source-destination
pairs, the rate region achievable by the flow is within a factor O(log3 k) of the rate region defined by the edge-partitioned cut-set bounds.
References
[1] P. N. Klein, S. A. Plotkin, S. Rao, and E. Tardos: “Approximation Algorithms for Steiner
and Directed Multicuts,” J. Algorithms vol. 22, No.2, pp. 241-269, 1997.
[2] F. T. Leighton and S. Rao, ’“Multicommodity max-flow min-cut theorems and their use
in designing approximation algorithms,” Journal of the ACM vol. 46, No.6, pp. 787-832,
1999.
[3] N. Linial, E. London, and Y. Rabinovich “The Geometry of Graphs and Some of its
Algorithmic Applications,” Combinatorica vol. 15, No.2, pp. 215-245, 1995.
[4] L. Schrijver “Combinatorial Optimization: Polyhedra and Efficiency, ” Springer-Verlag,
2003.
[5] J. Edmonds and E. Giles “A min-max relation for submodular functions on graphs,”
Annals of Discrete Mathematics, vol.1, pp. 185-204, 1977.
[6] E. L. Lawler and C. U. Martel, “Computing maximal Polymatroidal” network flows,”
Math. Oper. Res., Vol. 7, no. 3, Aug. 1982.
[7] A. Federgruen and H. Groenevelt, “Polymatroidal flow network models with multiple
sinks,” Networks, vol. 18, no. 4, pp. 285-302, 1988.
19