MFFN based Static Synchronous Series Compensator (SSSC) for
advertisement
 for")
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
November 4 - 8, 2007, Kaohsiung, Taiwan
MFFN based Static Synchronous Series
Compensator (SSSC) for Transient Stability
improvement
V.K.Chandrakar and A.G.Kothari
Voltage sourced converter (VSC) based series connected
FACTS controller can inject a voltage with controllable
magnitude and phase angle at the line frequency and found to
be more capable of handling the Power system problems.
The benefits of using an SSSC are listed in [2]-[4].In
ref.[3] &[4 ], the modeling and control aspects are given in
details. In ref.[5], paper describes the independent control of
series FACTS devices based on local measurable components
with conventional PI controller. However, PI controller is less
effective for nonlinear system reported in literature [6].
The Artificial neural networks (ANN) offers an alternative
solution to the conventional PI controller[6].Ref.[6], presented
the Radial basis function network model in coordination with
extended kalman filter(EKF) based controller for nonlinear
UPFC device. However, effect of damping schemes like PSS
& POD is not included in analysis. Ref.[9], demonstrated the
RBFN based FACTS devices in coordination of POD&PSS
damping schemes. However, MFFN controller is not included
for analysis. This paper presented the coordination of two
control variables by conventional PI controller and Multilayer
feed forward network (MFFN) controllers are tested on power
handling capacity of the line and transient stability
improvements of SMIB system. The damping of oscillations
are conventionally handle by the power system stabilizer
(PSS). This paper presented the power oscillations damping
(POD) control [8] and PSS in coordination with SSSC for
damping of oscillations improvement.
Abstract-- The main aim of the paper is to analyze the
performance of Multilayer feed forward network( MFFN) based
SSSC on power handling capacity of the line, improvement in
transient stability and damping of oscillations of the Single
machine infinite bus system(SMIB). This paper presents the
comparative performance studies of two different controllers
namely: [i] Conventional PI controller , and [ii]Multilayer feed
forward
network (MFFN) .Controllers are
designed to
coordinate two control inputs : in-phase voltage and the
qudrature voltage of SSSC. The coordinated action of proposed
SSSC controllers with power oscillations damping (POD) control
& power system stabilizer (PSS) are tested for dynamic
performance of the system under various system conditions. The
simulation results shows that the proposed controllers increases
the power handling capacity of the line, significant improvement
in transient stability of the system, and damping of oscillations.
The results indicates that the coordinated POD & PSS action
further improves the dynamic performance of the system. The
proposed SSSC controllers are tested in multi-machine system.
The MFFN based SSSC controller provides superior dynamic
performance than PI controller.
Index Terms-- Damping of oscillations, Power oscillations
damping control, Power system stabilizer, Multilayer feed
forward network, SSSC, Transient stability
T
I. INTRODUCTION
he need for flexible and fast power flow control in the
transmission system is anticipated to increase in the future
in view of utility deregulation and power wheeling
requirement . The utilities need to operate their power
transmission system much more effectively, increasing their
utilization degree. Reducing the effective reactance of lines
by series compensation is a direct approach to increase
transmission capability. However, power transfer capability of
long transmission lines is limited by stability considerations
[2]. The advent of fast acting FACTS devices[1] allows for
fast and vernier control of series compensation using
Thyristor controlled series capacitor(TCSC) and static
synchronous series compensator (SSSC)[3],[4].TCSC is
variable impedance device based on thyristor ,while SSSC is
based on voltage source converter (VSC) . In recent years,
II. SYSTEM MODEL
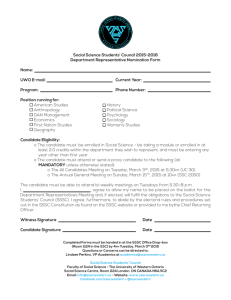
The system depicted in Fig.1 and Fig.2 is used to validate the
implementation of the proposed PI and MFFN model for
SSSC controller. The detail system data is given in Appendix.
The synchronous generator is represented by a 6th order
machine model and the generator excitation system has a
simple automatic voltage regulator (AVR) as shown in Fig.
3.For the transient stability analysis mechanical power input is
assumed to be constant. The SSSC is located at the sending
end of the line in the SMIB system chosen as typical case
[5],[7],[9]. In case of the multi-machine system, SSSC is
tested at three different locations as shown in Fig.3.
V.K.Chandrakar is with Department of Electrical Engineering,
G.H.Raisoni College of Engineering. Nagpur, India, 440016, (e-mail:
vc_vkc@yahoo.co.in , vkchandrakar@satyam.net.in ).
III. SSSC MODEL
SSSC can operate in four different ways [2].To achieve
real and reactive power flow control[5],[9], we need to inject
series voltage of the appropriate magnitude and angle. The
A.G.Kothari is with the Department of Electrical Engineering,
Visvesvaraya National Institute of technology, Nagpur, India, 440011
376
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
injected voltage can be split into two components which are
in-phase and in-quadrature with the line current. The real
power is controlled using the reactive voltage and the reactive
power is controlled using the real voltage. The real and
reactive power reference is obtained from the steady state load
flow requirements. The real power reference can also be
modulated to improve damping and transient stability. The
voltage at bus C can be controlled readily by directly
calculating the required real voltage to be injected . The
design criteria for both the proposed controller for SSSC is
based on local measurable component at SSSC location. The
measured real power and measured bus C voltage. Measured
value is compared with steady state reference value. The error
signals are used to get injected voltage real and imaginary
component of V pq . The rating of SSSC is calculated by the
Where,
November 4 - 8, 2007, Kaohsiung, Taiwan
φ 2 = tan −1 (iD / iQ )
A.1.2 Bus C voltage control
The voltage at bus C of test system as shown in Fig. 4 is
algebraically related to that at bus B and the reactive voltage
Bus Bus
Bus
A
B SSSC C
G
Line 1
Bus 1 Bus 2
T1
G1
Damping
Kf. s
-
(2)
V(ref.)+
∑
+
(3)
Ka
1+ sTa
Main
regulator
Vt
1 + s Tf
+
∑
Ke
Kp
1+ sTe
Exciter
-
Vfd
Fig. 3 AVR model
D
b
damping
signal
-
subscripts ‘D’ and ‘ Q’ denote the variable in D-Q frame.[ e pq
Bus B
Bus C
Bus D
b
, e pq ]: are the components of injected voltage V pq . [ vD , vQ ]
V1
d
, [ vD , vQ ] and [ vD , vQ ]are the components of voltage at
eP = eDpq ∗ sin(φ 2 ) + eQpq ∗ cos(φ 2 )
(7)
Line Impedance
Vr
injected for power flow control . The voltage relation is given
by:
Injected reactive and real voltage are written in terms of
injected voltage in D-Q frame:
(6)
V2
Fig. 4 Simplified SMIB system
(5)
eR = e ∗ cos(φ ) − e ∗ sin(φ )
e pq
Vs
bus B, bus C and bus D respectively. For the simplification, it
is assumed that the sending end voltage Vs is constant and
power at receiving end or at bus D is approximately equal to
that at bus C of the test system with SSSC therefore control
of power at bus C is applied. The feedback signal is readily
available. Real power at bus C in D-Q frame of reference is:
2
Load 3
Fig. 2. Multi-machine 7 bus system with SSSC
(4)
pq
Q
Load 4
Load 2
SSSC Location 'c'
wb is the base frequency and w0 is system frequency . The
2
Infinite
Bus
Line 3
(1)
vQc = vQb + eQpq
pq
D
Location'a'
c
differential equation for the current at bus C in the D-Q frame
of reference are given by[9] :
P c = vDc ∗ iD + vQc ∗ iQ
SSSC
T2
G2
Bus 7
Bus 6
Load 1
SSSC Location 'b'
Bus 3 Bus 4
Line 2
The real power control can be achieved by control of
reactive voltage component of injected voltage V pq . The
d
Bus 5
b
A.1.1 Power flow control
c
Line
Fig.1. Single machine infinite bus system (SMIB)
The mathematical relations for power flow control and
voltage of bus C control are developed with the help of
simplified system shown in Fig. 4.
c
Infinite
Bus
T
Vdc
A.1 Conventional PI controller
Q
Bus
D
VSC
product of magnitude of max line current and magnitude of
max. injected voltage V pq .
diD
= (− R * wb / x )iD − w0iQ + ( w0 / x)(vDc − vDd )
dt
diQ
= (− R * wb / x)iQ − w0iD + (w0 / x )(vQc − vQd )
dt
c
b
pq
Where, vD = vD + eD
(8)
377
v c = {(vDc )2 + (vQc )2 }
(9)
v c = {(vRb + eRpq )2 + (vPb + ePpq ) 2 }
(10)
vRb = VDb ∗ cos(φ 1 ) − VQb ∗ sin(φ 1 )
(11)
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
vPb = vDb ∗ sin(φ 1 ) + vQb ∗ cos(φ 1 )
Where W ji are the weights connecting the input to node j in
(12)
Since all quantities are locally available, we can easily
the hidden layer, b j is the bias to the node and Woi are the
pq
P
calculate real voltage e to be injected to obtain the desired
voltage at bus C. The SSSC does not exchange any real power
with the system. However some power is drawn to
compensate for the losses. The DC side capacitor voltage Vdc
is described by the dynamical equation:
dVdc
= (− gc ∗ wb / bc ) ∗ Vdc − (wb / bc ) ∗ idc
dt
November 4 - 8, 2007, Kaohsiung, Taiwan
weights from the hidden to output layer. Four neurons in the
hidden layer are chosen for training. After having training for
a period of time, the training error should have converged to a
value so small that, if training was to stopped , and the
weights frozen, then, the neural network would continue to
identify the plant ,while the operating condition remain fixed.
The training of NNs is said to have reached a global minimum
after changing operating conditions, as well as freezing the
weights, the response of the network is still reasonably
acceptable.
(13)
where gc and bc are the conductance and susceptance of the
DC capacitor respectively. By using “(1)”-“(13)” the
conventional power flow controller block diagram is
IV. SYSTEM CONFIGURATION FOR PLANT
developed as shown in Fig.5. The signal τ 1 & τ 2 are applied
IDENTIFICATION
to transformed receiving end bus reference to the bus B
reference. The gain Kse & Kpe are optimized by using
The ANN model as shown in Fig.7 is used to represent the
nonlinear control design block set. By adjusting the gain of
feedback system damping ratio can be improved. The input output mapping of SMIB system. The input vector,
maximum and minimum voltage limits are chosen for the U (k ) consists of the deviation in local measurable components
safe operation of SSSC under abnormal system conditions.
namely: change in bus C voltage ( ∆V2 (k )) & change in real
V2(ref.)
PI
+
power at bus C ( ∆ P2 ( k )) for the SSSC control. The U(k) =
+
%
-
-
τ2
Vs
Kse
Series
PI
P2(ref.)
+
-
Y (k ) = ∆eDpq , ∆eQpq . The neural
∧
∧
Y ne t ( k ) = f ( X ( k )) , where (X(k)) is the
network output,
input vector to the identifier. Consisting of three time lag of
system
input
and
output
respectively,
that
is
T
X (k) = [Y(k −1),U(k −1),Y(k − 2),U(k − 2),Y(k − 3),U(k − 3)] . The error
-
Vs
τ1
Kpe
P2
vector E ( k ) used for updating weights during training is
Fig. 5. Injected series voltage controller
∧
given by E (k ) = Y ( k ) - Y net ( k ) .
III. MULTILAYER FEED FORWARD NETWORK (MFFN)
It is well know that a MFFN with back propagation (BP)
algorithm is most widely used NN model for non linear
control of a power system[6]. In this paper, the MFFN consists
of three layers of neurons interconnected by weight as shown
in Fig. 6. The MFFN transforms n inputs to m outputs
∧
n
Input layer
m
Output layer
X2
y
Xn
1
k
Fig. 6: The three layers neural network
(14)
V. POWER SYSTEM OSCILLATIONS
DAMPING CONTROLLER
A damping controller is provided to improve the damping
of power system oscillations [8],[9].The damping controller
and the output of the network is given by
k
y = ∑ (Woi .hi )
Hidden layer
1
X1
through nonlinear function, f : R → R . The weights of
the MFFN are trained by the error back propagation algorithm
in the batch by the error back propagation algorithm in the
batch mode and the hidden layer neurons in the network uses a
sigmoid activation function. The out put of the node j in the
hidden layer is given by:
n
h j = g ∑ W ji . X i + b j
j =1
( k ), P2 ( k ) ] . The output
& phase angle, that is
e Qpq
+
%
2
vector, Y ( k ) consists of change in injected voltage magnitude
Voltage
Controls
V2
[ ∆ V2 ( k ), ∆ P2 ( k ) ] and Re f .(k)= [V
e Dpq
(15)
i =1
378
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
be considered as comprising two cascade connected blocks.
The speed deviation signal is derived from the difference of
measured power at SSSC location and the set mechanical
input power and the error signal is integrated and multiplied
by
1 M .Fig. 8 shows the block diagram of POD
control. The
November 4 - 8, 2007, Kaohsiung, Taiwan
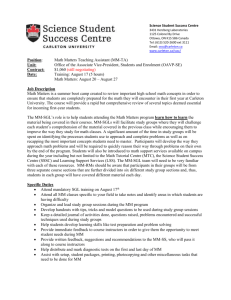
10 deg. The Fig.10 shows the power –transmission angle
curve for SMIB system with SSSC controlled by various
controllers, keeping the injected voltage constant at 15% of
the operating voltage as case study. The result indicates that
the PI based SSSC increases the power handling capacity of
the line by nearly 5% and the MFFN based SSSC by 7% with
respect to without SSSC in the system.
Vmax
Ref(k)
Speed
deviation
Y(k)
Plant
Kpss
sTw
1+sTw
1+sT3
1+sT4
1+sT5
1+sT6
U(k)
-1
U(k-1)
Vfd
Vmin
Fig. 9. Transfer function block diagram of the PSS
z
-1
MFFN
-1
U(k-3)
Y(k-3)
z
_
(NN
Identifier)
-1
z
5
+
4.5
Ynet(k) E(k)
Real power , pu
U(k-2)
z
Y(k-2)
-1
z
Y(k-1)
-1
z
4
3.5
3
a
b
2.5
2
c
1.5
1
0.5
0
Fig. 7 Block diagram for ANN identifier
0
optimized parameters of POD controller is used, so as to
achieve the desire damping ratio of the electromechanical
mode and compensate for the phase shift between the control
signal and the resulting electrical power deviation. The output
of the damping controller modulates the reference setting of
power flow controller. In Fig.5, The P2 deviation signal is
replaced by P2 + u in order to include the POD for multimachine system , P2 signal is replaced by
P2+
K pod (∆w1 − ∆w2) ,where, (∆w1 − ∆w2) is the difference
Transmission angle , deg.
Fig. 10. Power-delta curve
(a)Without SSSC (b) PI based SSSC (c) MFFN based SSSC
VII. SIMULATION RESULTS
A. Simulation in single machine infinite bus system
of speed deviations of generator1 and generator2. Fig.9 shows
the block diagram of power system stabilizer (PSS). The
output of PSS is applied to the AVR as an additional signal.
Digital simulation are carried out by the MATLAB software.
For the simulation, different loading conditions with different
fault locations in the SMIB system is included. The proposed
SSSC control schemes performance in terms of transient
stability issue and damping of oscillations are tested on SMIB.
VI. POWER –ANGLE CURVE AND STABILITY
The power –delta characteristics of the transmission line in the
SMIB system is developed under steady state condition of the
system. The transmission line voltage profile is kept constant
and the sending end source is assumed as the stiff source so
that the transmission angle can be vary whereas the infinite
dδ
dt
Kdd
sTw
1+sT1
1+sTw
1+sT2
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190
A1. Results under light load condition with three phase fault
at bus D
The digital simulation results are shown in Fig. 11 to Fig. 12
under light load condition with three phase fault of 50 ms
duration at receiving end of the line. The response of the PI
based SSSC is depicted in Fig.11,result indicates that PI based
SSSC with POD transient stability improves and oscillations
are damped within 4 sec. Whereas with PSS oscillations are
reduced and with the coordinated action of PSS & POD
further improve the dynamic performance of the system. The
post fault rotor angle excursion is arrested by MFFN based
SSSC and the oscillations are damped within 3.5 sec. The
transient stability is improved and the damping control scheme
improved the dynamic performance as shown in Fig. 12.
u
Fig. 8. Transfer function block diagram of the POD
bus voltage is kept constant. For each set of transmission
angle, sending end power is measured, similarly for the
transmission angle varies from 0 deg. to190 deg. in the step of
379
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
of generator-1 and generator-2 ( ∆w1 − ∆w2) for SSSC
location ‘a’ is comparatively smaller then for location ‘b’ &
‘c’. Therefore SSSC location at ‘a’ is considered to be more
favorable location in multi-machine test system.
c
50
b
150
a
b
0
0
1
2
Time , sec.
3
Rotor angle , deg.
Rotor angle , deg.
100
November 4 - 8, 2007, Kaohsiung, Taiwan
4
100
c
50
a
0
0
Fig.11. System with PI based SSSC
(a)With POD (b) With PSS (c ) With POD &PSS
A2. POD & PSS under heavily loaded condition
with three phase fault at bus C
The simulation result of SMIB system during heavily
loaded condition with three phase fault of 50 ms at the sending
end of the line is shown in Fig.13 & Fig. 14. The PI based
SSSC helps to maintain transient stability of the system as
depicted in Fig. 13.The PSS &POD independent action
reduces the oscillations. The PSS is comparable better than
POD under abnormal system condition. The results shown in
Fig.14 depicts the response of the system with MFFN based
SSSC under heavily loaded condition ,generator output Pg =
1.01 p.u. with three phase fault of 50ms duration. Result
demonstrates that the MFFN based SSSC significantly
improved the transient stability. The independent action of
POD & PSS provides effective damping whereas its
simultaneous action proved to be the superior damping
performance. The MFFN based SSSC is superior than
conventional PI controller.
0 .5
1
1.5
T im e, sec .
2
2.5
3
Fig. 13. System with PI based SSSC
(a) With POD (b) With PSS (c) With POD & PSS
150
Rotor angle , deg.
a
100
c
b
50
0
0
1
2
3
Time, sec.
4
5
Fig.14. System with MFFN based SSSC
(a) With POD (b) With PSS (c) With POD & PSS
-3
120
4
a
Rotor angle, deg.
Speed deviation
(w1-w2) rad. / sec.
c
100
80
b
60
40
20
0
0
1
2
3
4
x 10
2
0
b
a
- 2-4-6
- 8-
-
0
5
1
2
3
4
5
6
7
Time (sec.)
8
9
10
Time, sec.
Fig. 12. System with MFFN based SSSC
(a)With POD (b) With PSS (c ) With POD &PSS
Fig.15.Multi-machine system with SSSC with POD
(a)PI, and (b) MFFN controller
B. Simulation in multi-machine system
VIII. CONCLUSIONS
The proposed controllers for SSSC performance is tested in
multi-machine system environment. The simulation result
presents the inter area oscillations during three phase fault of
50 ms duration at receiving end of the line 3 is shown in Fig.
15. The results indicates that the difference of speed deviation
is very small with MFFN based SSSC. The MFFN based
SSSC is tested at three different locations ‘a’, ‘b’ & ‘c’ in the
multi-machine system. The simulation result is shown in
Fig.16. The result indicates that variation in speed difference
This paper presents a design of PI and MFFN controllers for
the SSSC control in single machine infinite bus system. The
controllers comparative performance in terms of power
handling capacity of the line, transient stability improvement
and damping of oscillations is demonstrated under various
system conditions. The proposed MFFN model performance is
comparatively better than PI controller. The results indicates
that the applied power system stabilizer (PSS) performance is
380
The 14th International Conference on Intelligent System Applications to Power Systems, ISAP 2007
03 H/km, C1 = 12.74e-09 F/km ; Length of line = 450 km ;
Length of line 1 = 350 km ;Length of line 2 = 150 km; Length
of line 3 = 450 km ; CT: 260MVA, 50e6/1e6 ,R = 0.002 ,L =
0.04,Rm = 100, Xm= 200; PT: 6MVA, 208/345e3,R=
0.002,L = 0.04 ,Rm = 100; SSSC: 5MVA, Vop= 345KV,
Vpq= ± 0.3Vop, Ks= 0.9, Kd= 1.0,Kse= 0.9, Kpe = 2.3;
POD: Kd=144,Tw=15,T1=0.0518e-6s,T2 = 0.0221e-6s; PSS:
Kpss =20,Tw=15,T3=T5= 0.02e-6s, T4=T6 = 0.035e-6s.
better than independent action of power oscillations damping
(POD) control in the system. The coordinated action of POD
& PSS with MFFN model provide further improvement in
dynamic performance of the system. The MFFN controller
demonstrate the robust dynamic performance and easy to
coordinate with damping schemes. The SSSC location at
position ‘a’ is favorable location for the multi-machine
system.
Speed deviation
(w1-w2) rad. /sec.
10
10 x
8
6
4
2
0
-2
-4
-6
0
Multi-machine test system data(in p.u.)
-3
Base voltage:220kv,MVA(Base):100 MVA,f = 60c/s,
G1: Similar to SMIB system , Generator 2: 300MVA, 22KV,
60c/s, Rs = 0.00045 , Ls = 0.14 ,Lmd = 1.51,Lmq = 1.45,Rf =
0.000096, Lfd =0.61168, H = 2.87882s; Exc. System –1&
Exc. System-2:Ka=10 ,Ta = 0.001 s , Ke = 1.0 , Te = 0.001 s,
Kp1 = 1,Kp2 = 2.0 ; CT: 500MVA, 60e6/1e6, R=0.002,
L=0.04,Rm=100, Xm= 200 ;PT:10MVA,208/345e3 ,R =
0.002, L = 0.04, Rm = 100; SSSC: 5MVA, Vop=220KV ,
Vpq= ± 0.3Vop, Ks= 0.95, Kd=1.0, Kse=0.9, Kpe = 2.5,
POD:Kpod=0.6, Tw=10,T1=0.051e-6s,T2= 0.022e-6 s ; PSS:
Kpss=2,Tw=10, T3=T5=0.2e- 7s, T4=T6= 0.035e-6s; Load 1:
0.15 p.u , Load 2: 0.15p.u , Load 3: 0.40+j 0.10 p.u. Load 4 :
1.0+j 0.05 p.u.
c
a
b
1
November 4 - 8, 2007, Kaohsiung, Taiwan
2
3
4
5
6
7
Time , (sec.)
8
9
10
Fig.16. Simulation results of multi-machine system
with MFFN based SSSC located at : ‘a’, ‘b’, ‘c’
IX. REFERENCES
[1]A.A Edris, R Aapa, M H Baker, L Bohman, K Clark, “ Proposed terms and
definitions for flexible ac transmission system (FACTS),” IEEE Trans. on
Power Delivery ,Vol. 12, No.4, 1997.
[2] N.G.Hingorani and L.Gyugyi, Understanding FACTS , Piscataway, NJ:
IEEE Press,2001.
[3]K.Sen.“SSSC- Static Synchronous Series Compensator : Theory modeling
and application,” IEEE Trans. on Power Delivery, Vol.13,No.1,pp. 241-246,
1998.
[4]L. Gyugyi, C. Schauder, and K.Sen, “ Static Synchronous Series
Compensator : A solid state approach
to the series compensation of
transmission lines,” IEEE Trans. on Power Delivery, Vol.2, No.1, pp.406417,1997.
[5]K.R.Padiyar, A.M.Kulkarni,“ Development and Evaluation of controls for
unified Power flow controller ,”IEEE Trans. on Power Delivery, Vol.13,
No.4, pp. 1348-1354 , 1998.
[6]P.K.Dash, S.Mishra& G. Panda,“A radial basis function neural network
controller for UPFC,” IEEE Trans. Power system, Vol.15,No.4, pp.12931299, 2000.
[7]V.K.Chandrakar,A.G.Kothari, “Fuzzy logic based static synchronous series
compensator(SSSC) for transient stability improvement,”2nd IEEE DRPT
Hong Kong , DRPT-245,2004.
[8]N.Tambey & M.L.Kothari,“Damping of power system oscillations with
unified power flow controller (UPFC),” IEE Proc. Genera. Trans. Distri.
Vol.150, No. 2, pp.129- 140,2003.
[9]V.K.Chandrakar,A.G.Kothari,
Comparison
of
RBFN
based
STATCOM,SSSC and UPFC Controllers for Transient Stability improvement,
IEEE PSCE 2006, Power Systems Conference & Exposition , P.No.1369,
USA,2006
[10] The Math Works Inc. Simulink Users Guide, The Math Works Press,
Natick, Mass, 1992.
X. APPENDIX-1
SMIB system data ( in p.u.)
G: 250MVA,13.8KV, 60c/s, Rs = 0.00045 , Ls = 0.14 , Lmd
= 1.51 , Lmq = 1.45 , Rf = 0.000096 , Lfd =0.61168 , H =
0.87882s ; Exc. System: Ka=2, Ta = 0.001 s, Ke = 1.0 ,Te =
0.001 s, Kp = 1; T.line: R1=0.01273 omh/km, L1 = 0.9337e381
XI. BIOGRAPHIES
A.G.Kothari received the B.E. and M.Tech. degrees from
Nagpur University. He obtained Ph.D. degree from Indian
Institute of Technology , Kanpur. At present, he is a Professor
and Head of the Electrical Engineering Department. He was
Dean(Academic) from 1999 to 2002 at Visvesvaraya National
Institute of Technology , Nagpur. He has number of research
publications in International / National referred Journals. His
research areas include Power systems and Power electronics.
He is Member of the Institution of Engineers (India).
V.K.Chandrakar obtained B.E degree from R.U. Raipur and
M.Tech and PhD from VNIT, Nagpur . Presently working as
Professor and Head of Electrical Engineering, G.H.R.C.E,
Nagpur. He has number of research publications in Journals &
Conferences etc. He is Member of the Institute of Engineers
(India). His research interests include FACTS devices and AI.