Lagrangian formulation for the rapid estimation of helicopter rotor
advertisement

The Aeronautical Journal
August 2014 Volume 118 No 1206
861
Lagrangian formulation for the
rapid estimation of helicopter
rotor blade vibration
characteristics
I. Goulos
i.goulos@cranfield.ac.uk
V. Pachidis and P. Pilidis
Centre for Propulsion
Cranfield University
Bedford, UK
Abstract
This paper presents a numerical formulation targeting the rapid estimation of natural vibration
characteristics of helicopter rotor blades. The proposed method is based on application of
Lagrange’s equation of motion to the kinematics of blade flap/lag bending and torsion. Modal
properties obtained from Bernoulli-Euler beam and classical torsional vibration theory, are utilised
as assumed deformation functions in order to estimate the time variations of strain and kinetic
energy for each degree of freedom. Integral expressions are derived, describing the generalised
centrifugal force and torsional moment acting on the blade in terms of normal coordinates, for flap/
lag transverse displacement and torsional deformation. Closed form expressions are provided for
the direct analysis of hingeless, freely-hinged and spring-hinged articulated rotor blades. Results
are presented in terms of natural frequencies and mode shapes for two small-scale rotor blade
models. Extensive comparisons are carried out with experimental measurements and nonlinear
finite element analysis. Predictions of resonant frequencies are also presented for two full-scale
rotor blade models and the results are compared with established multi-body dynamics analysis
methods. It is shown that, the proposed approach exhibits excellent numerical behaviour with
low computational cost and definitive convergence characteristics. The comparisons suggest very
good and in some cases excellent accuracy levels, especially considering the method’s simplicity,
computational efficiency, and ease of implementation.
Paper No. 4021. Manuscript received 19 June 2013, accepted 16 March 2014 .
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
862
The Aeronautical Journal
August 2014
Nomenclature
Roman Symbols
A,B,C,D
A(r), Ip(r)
mode shape equation integration constants used in classical methods
blade cross-sectional area/polar moment of inertia, m2, m4
flap/lag/torsion
A Lagrange
Lagrange’s equation coefficient matrix
ABernoulli Bernoulli–Euler theory matrix of equation coefficients
ATorsion classical torsion theory matrix of equation coefficients
dFx , dFy , dFzcentrifugal force components acting on a beam element of differential mass dm
on the X, Y and Z axes respectively, Newton
dm beam element differential mass, = ρA(r)dr, kg
torsion
dMcentre
centrifugal torsional moment component acting on a beam element of differential
mass dm and centre mass offset from elastic axis Yoffset(r), Nm
e blade root/hinge offset distance from the centre of rotation as a fraction of rotor
blade radius
E, G material Young’s/Stress modulus, Pa
f i,jflap/lag/torsionhub-spring inter-modal coupling coefficient between the ith and jth assumed
modes
G i,jflap/lag/torsionoverall effective stiffness inter-modal coupling coefficient between the ith and jth
assumed modes
G flap/lag/torsion overall effective stiffness inter-modal coupling matrix
I i,jflap/lag/torsion effective centrifugal stiffening inter-modal coupling co-efficient between the ith
and jth assumed modes
I flap/lag(r) blade cross-sectional area moment of inertia, m4
flap/lag/torsion
k i,j
elastic inter-modal coupling coefficient between the ith and jth assumed modes
K flap/lag/torsion blade hinge/pitch-control system spring stiffness, Nm/rad
l actual blade length, = R(1 – e), m
flap/lag/torsion
m i,j
inertial inter-modal coupling coefficient between the ith and jth assumed modes
flap/lag/torsion
M
inertial inter-modal coupling matrix
N number of assumed mode shapes
flap/lag/torsion
qi
(t)time-dependent generalised coordinate of the ith mode shape
flap/lag/torsion
flap/lag/torsion
qi
ith eigenvector of Lagrange’s equation coefficient matrix ALagrange
Qi flap/lag/torsion generalised centrifugal force/moment corresponding to the ith coordinate
r local beam element radius, m
R rotor blade radius, m
t time, sec
T flap/lag/torsion kinetic energy of the rotor blade, Joules
u flap/lag(r, t) beam element X axis displacement, m
T flap/lag/torsion strain energy of the rotor blade, Joules
w flap/lag(r, t) time-dependent transverse displacement, m
Wflap/lag/torsion virtual work done by the centrifugal force, Joules
x
effective modal ordinate, = r – eR, m
xBernoulli Bernoulli–Euler vector of integration constants, = (A B C D)T
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
863
xTorsion classical torsion theory vector of integration constants, = (A B)T
flap/lag/torsion
Xi
(r)shape for the ith mode of motion, m
Yoffset(r)
aerofoil centre mass offset from elastic axis, m
Greek Symbols
ρA 2
ωB
EI
β
Bernoulli–Euler beam modal frequency parameter, == 4
γ
classical torsion theory modal frequency parameter, = T
I p ,midspan
GJ midspan
ε, ηLagrangian frequency relative error for transverse displacement and torsion
respectively
θ(r, t) time-dependent torsional deformation angle, rad
ρ
material density, kg/m3
flap/lag/torsion
φi
(r)assumed deformation function of the ith mode shape, rad
flap/lag/torsion
Φi
(r)assumed mode shape vector, ( φj flap/lag/torsion(r), j = 1; ...N )T
flap/lag/torsion
ωi
Natural vibration frequency of the ith mode of motion
Bernoulli–Euler beam theory modal frequency, rad/sec
ωB ωT classical torsion theory modal frequency, rad/sec
nominal rotorspeed, rad/sec
Ω
Superscripts
(˙), (¨) 1st and 2nd derivative with respect to time, t
( )′, ( )″
1st and 2nd derivative with respect to beam radius r or modal ordinate x
flap/lag/torsion
()
referring to the flap/lag/torsion degree of freedom respectively
Subscripts
()i,j ()midspan mode number indices
value corresponding to the blade midspan position
Acronyms
DOF
FEA
IM
ODE
PDE
RHS
TM
Degree of Freedom
Finite Element Analysis
Integrating Matrix
Ordinary Differential Equation
Partial Differential Equation
Right-Hand Side
Transmission Matrix
1.0Introduction
The main rotor of a helicopter is undoubtedly a mechanically complex structure. Part of the reason
for its mechanical complexity arises due to its function as a lifting, propulsive, and a control device
simultaneously. Its constant operation within a highly unsteady aerodynamic environment in
forward flight, essentially results in also highly unsteady exerted hub loads. Obtaining time-accurate
estimates of the rotor imposed forces and moments on the aircraft fuselage, is essential for flight
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
864
The Aeronautical Journal
August 2014
dynamics simulation, especially regarding applications which include higher frequency rotor
dynamics. This prerequisite has been brought to the helicopter community’s attention, partially
due to its necessity for the design of reliable hingeless and bearingless rotor control systems.
In an effort to address the aforementioned requirement, the departure from the typical disc-like
treatment of the main rotor and the adaptation of methodologies involving individual blade treatment
was necessary. This essentially acted as an enabler in terms of including more sophisticated rotor
inflow and blade aerodynamics models. Some of the earliest individual-blade mathematical formulations would treat each blade as a rigid body. Hub springs and effective hinge offsets were assumed
in order to simulate the actual hub stiffness of hingeless blades. Such models include the ‘Genhel’
rotor model, developed by Howlett(1) for the UH-60 Blackhawk. Subsequent improvements were
carried out on the Genhel model, reported in Refs 2-5. Other rigid-blade rotor models include those
due to Curtiss, Chaimovich, Miller, Talbot, and Padfield, described in Refs 6-10 correspondingly.
Several studies are reported in the literature, where flexible blade models have been used
in order to study the effects of blade elasticity on the dynamics of various helicopter rotors.
Shupe(11-12) examined the effects of the second flap bending mode of a hingeless blade on the
transmitted hub moment. He emphasised that, the pronounced radial non-linearity in the once-perrev aerodynamic forcing during forward flight, essentially contributes to the excitation of higher
flap bending modes. It was therefore concluded that, inclusion of higher order modal content in
flight dynamics simulation is essential for the correct hub moment prediction of hingeless rotors,
especially considering high-speed flight conditions.
Lewis(13) used a multi-body dynamics formulation in order to investigate the aforementioned
effects on the dynamics of the UH-60 articulated rotor. The effects of blade flexibility were found
to be quite small in hover and increase slightly with increasing speed. Sturisky(14) reports that, for
the AH-64 articulated rotor, inclusion of higher order inflow dynamics along with flexible blade
modeling, may indeed improve the prediction accuracy of the rotor’s off-axis response to pilot
control inputs. Turnour et al(15) deployed the elastic rotor model described in Ref. 16 coupled with
the fuselage equations of the ‘UM-Genhel’ flight dynamics model(5) and a finite-state induced flow
model(17). Their goal was to evaluate the influence of blade flexibility on the frequency response
characteristics of an articulated rotor helicopter. It was concluded that, for the particular rotor
configuration, including flexible blade modeling along with higher order inflow dynamics, does
not improve the prediction accuracy of the off-axis rotor response to pilot control inputs.
In light of what has been described, it is understood that the effect of blade flexibility on the
rotor response characteristics is rather pronounced for hingeless rotor systems and relatively
moderate for articulated rotors. Most of the elastic blade formulations deployed in the aforementioned references, are based either on Finite Element Analysis (FEA), or on multi-body dynamics.
Hence, they require detailed knowledge of the geometry and overall structural properties of the
rotor blade as well as the corresponding computational infrastructure associated with FEA. They
are also accompanied by a relatively large computational overhead which may be prohibitively
large with regards to the application for which they are designated for. It is therefore realised that,
a computationally efficient methodology of sufficient fidelity, comprehensiveness, generality, and
ease of implementation is required for the inclusion of rotor blade flexibility in flight dynamics
applications. The approach has to enable existing as well as future potential flight simulation codes,
to account for blade elasticity without resorting to cost-inducing FEA or multi-body dynamics.
This paper describes a comprehensive methodology targeting the rapid estimation of natural
vibration characteristics of helicopter rotor blades. The present theory makes use of the Lagrangian
equation of motion for a rotating, continuous system of nonuniform mass and stiffness properties.
Any set of boundary conditions corresponding to the hub support of a helicopter rotor blade is
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
865
applicable. The proposed structural formulation is applied for an articulated and a hingeless smallscale experimental rotor model. Results are presented in terms of predicted flap-lag-torsion natural
frequencies and mode shapes for both investigated rotor blade models. It is shown that, the proposed
method exhibits excellent numerical behaviour with definitive convergence characteristics and low
computational cost, for every mode of motion presented. Extensive comparisons are carried out with
experimental measurements as well as with results from nonlinear FEA. Predictions of resonant
frequencies are also presented for two full-scale rotor blade models and compared with results
from established multi-body dynamics formulations employed in comprehensive rotorcraft codes.
2.0Background
2.1Nonlinear kinematics and natural vibration characteristics helicopter
rotor blades
The effort to determine the dynamic behaviour of rotating blades started quite early in the literature.
Houbolt and Brooks(18) derived the coupled differential equations of motion for combined flapwise/
chordwise bending and torsion for twisted nonuniform rotor blades. Their derivation was based
on the principles of classical engineering beam theory. Nonlinear terms of secondary nature, such
as shear deformation and rotary inertia were omitted. Linear coupling terms, mainly associated
with the blade’s centripetal acceleration due to the hinge’s pre-cone angle and steady state blade
flapping under external lift loads, were included. Exact solutions for continuous systems that
are governed by the Houbolt and Brooks equations do not yet exist. However, several analyses
can be found in the literature where approximate solutions have been acquired for the coupled
equations given in Ref. 18, or for some of their uncoupled sub-cases.
Hodges and Dowell(19) were able to develop a more generalised nonlinear theory considering
the elastic bending and torsion of long, straight, slender, homogeneous, isotropic beams undergoing moderate deflections. The equations of motion were derived by means of two individual
methods: the variational method based on Hamilton’s principle, and the Newtonian method
based on integration of forces and moments acting on a differential beam element. The associated
nonlinear strain-displacement relations were developed using the classical definition of strain,
and were considerably simplified in accordance with the premise of a long, slender beam subject
to moderate deformations.
Hodges et al(20) presented a thorough analysis considering the kinematics associated with
the elastic motion of Bernoulli-Euler beams subject to large deflections. A comprehensive
mathematical approach was presented using linear algebraic expressions in order to relate the
dominant kinematic variables expressed in the locally deformed principal axes, to a space-fixed
Cartesian axes system. Subsequently, Hodges(21) extrapolated the methodology of Ref. 20 to the
nonlinear dynamic analysis of pre-twisted, rotating beams. The nonlinear analysis of Ref. 21
attempted to abandon the common practice of assuming moderate rotations caused by structural
deformations in the description of the associated beam element kinematics. However, is is noted
that in order to derive the kinematic expressions for the orientation of the deformed beam crosssection, the assumption of small extensional strain on the elastic axis compared to unity, was
effectively invoked.
Murthy(22) deployed the Transmission Matrix(TM) method(23) in an effort to acquire approximate
solutions to a series of sub-cases of the Houbolt and Brooks Equations(18) for twisted nonuniform
rotating blades. The TM method requires that, the differential equations of motion are reduced
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
866
The Aeronautical Journal
August 2014
to a set of first order Ordinary Differential Equations (ODEs) by appropriate selection of a state
vector. Murthy(22) noted that, the state vector can be selected in several ways but it is preferable
for it to consist of physical quantities such as deflections, slopes, moments, and shears. Following
the derivation of the transmission matrix of the defined ODEs, the frequency determinants and
the modal functions were obtained for a given set of boundary conditions. The cases of combined
flapwise bending/chordwise bending/torsion, flapwise bending/chordwise bending, and flapwise
bending/torsion were studied. Murthy concluded that, the TM method yielded highly accurate
results with regards to the specific application.
Hunter(24) applied the Integrating Matrix (IM) method in order to determine the natural vibration
characteristics of a twisted, rotating propeller blade with nonuniform, asymmetrical cross section
and cantilever boundary conditions. The integrating matrix can be regarded as a tensor operator
of numerical integration, applicable to any function expressed in terms of discrete values at equal
increments of the independent variable. It was derived by essentially expressing an integral as a
polynomial in the form of Newton’s forward-difference interpolation formula. After expressing
the differential equations of motion in matrix form, the constants of integration were evaluated
based on the applied boundary conditions. The matrix differential equation was subsequently
integrated repeatedly, using the integrating matrix as a tensor operator. This process resulted in the
formulation of the classical eigenvalue problem. Hunter compared the IM method’s predictions
of natural vibration frequencies with experimental data as well as with known exact solutions.
He concluded that the IM method yields very accurate results.
Surace et al(25) applied an integral approach using structural influence (Green) functions in
order to estimate the coupled motion modal characteristics of rotating, nonuniform, pre-twisted
blades. They utilised a system of appropriate Green functions for a cantilever beam in order to
acquire approximate solutions to the Houbolt and Brooks equations. Weighting matrices were
used for integration and differentiation, similarly to the approach followed in Ref. 24. As a result
of its numerical formulation, the specific method requires a defined set of Green functions for any
imposed set of boundary conditions that the analyst may wish to specify. Although Green functions
are readily available for a cantilever beam, they may need to be re-derived for an articulated rotor
with flap and lead-lag springs in order to comply with the corresponding boundary conditions.
Thus, the methodology presented in Ref. 25, is not readily applicable-implementable for the
analysis of freely-hinged or spring-hinged articulated helicopter rotor blades.
2.2Minimum potential energy methods
The methodologies described in the aforementioned references, have tackled the problem of rotor
blade flexibility by evaluating numerically the fundamental differential equations of motion for
a nonuniform, pre-twisted rotating beam. Further to the references above, a series of analyses
can be found in the literature where the sub-cases of the uncoupled problem have been addressed
through deployment of approximate energy methods, such as Lagrange’s and Rayleigh’s methods
as well as the classical and modified Rayleigh-Ritz procedures. These approaches are based on
the principle of minimum potential energy and the deployment of a finite series of assumed
displacement functions-deformation modes, in order to estimate the system’s kinetic and strain
energies as functions of time. Their detailed descriptions along with their derivations can be
found in Refs 26-28.
Wilde et al(29) described a comprehensive methodology for the estimation of flapwise vibration
frequencies and mode shapes of a helicopter rotor blade. They tried to acquire a numerical
solution for the flapwise bending differential equation of motion, which included the aerodynamic
damping terms based on the assumption of linear aerodynamics. Their methodology consisted of
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
867
a combination of Rayleigh’s principle of variation and Fourier series expansion techniques. The
solution method included the assumption of a pre-supposed, periodic aerodynamic loading which
was expanded in a Fourier series about the azimuthal coordinate. The acquired series expression
was subsequently included in the corresponding differential equation of motion. Thus, the specific
methodology is not applicable for a complete aeroelasticity analysis where coupling with more
refined aerodynamic response and rotor inflow theories may be required for time-domain analysis.
Fasana et al(30) deployed the Rayleigh-Ritz method in order to investigate the vibration characteristics of sandwich beams with a constrained viscoelastic layer. Their analysis included the use
of simple polynomial expressions as assumed deformation functions. A total of 20 polynomial
functions were used in the analysis. It was reported that no sensible variation was detected in the
acquired results when the number of polynomials was increased up to a total of 80 functions.
Predicted natural frequencies corresponding up to the fourth bending mode for a cantilever beam
were presented. Results were compared with those from other various numerical schemes that
can be found in the literature. Good agreement was observed regarding the lowest mode natural
frequencies. There was however a noticeable deviation in the predicted higher mode frequencies
among all compared techniques. Fasana et al concluded that the Rayleigh-Ritz procedure was in
concurrence with the rest of the compared schemes regarding the particular application.
Hodges(31) extrapolated the analytical Ritz procedure to the case of nonuniform rotating beams
with radial discontinuities in bending stiffness and mass per unit length. Hodge’s method recognised
that, the analytical derivatives of the admissible deformation functions have to account for the
presence of discontinuities in the beam’s structural properties. Hence, a number of M + 1 discrete
segments were designated along a beam with M discontinuities in bending stiffness and mass per
unit length, each segment essentially having continuous structural properties. The deformation
of each beam segment was approximated with the employment of a power series formulation
of N terms, instead of using standard polynomial expressions. Geometric continuity conditions
were enforced at the corresponding boundaries of each beam segment. Hodges concluded that,
this approach always converges to exact solutions and that the magnitude of discontinuities does
not significantly affect neither the method’s accuracy, nor the rate of convergence. However,
the author of Ref. 31 emphasised that, using the corresponding terms of a simple power series
as admissible functions, may result in deteriorated accuracy and numerical instabilities due to
ill-conditioned matrices, when higher order terms (N) are required to be employed in the analysis.
It is understood from the discussion above that the accuracy of minimum potential energy
methods has been limited so far to the realms of approximation and only for the lowest modesfrequencies. This is due to the fact that, their success is highly dependent on the selection of
assumed displacement functions in terms of both quantity and quality. A relatively larger number
of functions is required so that the system is allowed to deform within most of its potential
displacement modes. Selecting a small number of assumed functions may essentially lead to
artificially imposed stiffness in the system which may result in acquired frequencies higher than
normal. This is a well known deficiency of Rayleigh’s method(28) which is based only on the first
assumed mode of deformation.
The assumed displacement functions need to comply with three fundamental requirements in
order to be used within the context of minimum potential energy analysis. These can be listed as
follows: (1) They need to satisfy the structure’s boundary conditions, (2) They must be linearly
independent-orthogonal with one another, and (3) They have to be as close as possible to the
actual deformation modes(28). It is also desirable, but not a prerequisite, that the first and second
spatial derivatives of the assumed functions are provided as analytical expressions. This is due to
the fact that, numerical differentiation errors could hinder the accuracy of the overall procedure.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
868
The Aeronautical Journal
August 2014
This is especially important when exceptionally large terms need to be well conditioned within
the deployed analytical expression.
The first and second bending modes may be relatively easy to approximate using standard
polynomial expressions found in the literature(32-33). However, when it comes to refined modeling,
which may require the inclusion of higher order assumed functions, the deviation between such
polynomial expressions and the actual modes of deformation becomes quite large. Hence, the
use of the aforementioned polynomial functions is rendered progressively invalid as the energy
method is further refined, and therefore higher order functions need to be included in the analysis.
2.3 Scope of present work
This paper describes a minimum potential energy method, capable of rapidly estimating the natural
frequencies and mode shapes of rotating helicopter blades with respect to flap/lag bending and
torsion. Lagrange’s equation of motion is utilised for a continuous system of nonuniform mass
and stiffness properties. The aforementioned weakness of energy methods is mitigated with the
employment of modal characteristics obtained from Bernoulli-Euler beam and classical torsion
theories as assumed deformation functions, instead of standard polynomial expressions found in
the literature. Computational efficiency is established by achieving quick convergence of calculated
modal frequencies to definite values. Only a relatively small number of assumed deformation
functions is required for convergence due to them originating from classical vibration analysis
methods instead of simple polynomial expressions.
The structure’s boundary conditions are implicitly catered for in the Lagrangian approach,
through application directly within Bernoulli-Euler beam and classical torsion theories. The
cases of hingeless, freely-hinged, and spring-hinged articulated rotor blades, are treated in detail
and closed form expressions are offered that can be readily implemented as assumed deformation functions. Integral expressions, describing the generalised centrifugal force and torsional
moment exerted on the blade, are derived and employed within Lagrange’s equation of motion.
The classical eigenvalue problem for a nonuniform, rotating structure with any set of imposed
boundary conditions, can therefore be formulated and solved with customary matrix techniques.
The solution of the devised eigenproblem essentially results in the structure’s natural frequencies
and mode shapes.
The flap-lag-torsion Degrees of Freedom (DOFs) are treated separately and thus neither elastic
nor aerodynamic or inertial coupling is taken into account during the formation of the Lagrangian
eigenproblem. This is due to the fact that, the proposed approach is predominantly designated for
dynamic response analyses in the time domain. Any imposed aerodynamic or nonlinear inertial
loads may therefore be treated as a time-history of external forcing using the convolution integral
to obtain the dynamic response of the blade.
It is thus understood that, the proposed approach essentially constitutes a readily implementable
integrated framework, applicable to the structural analysis of helicopter rotor blades during
preliminary design. Flight dynamics applications may benefit from this methodology, since it acts
as a fundamental baseline for the transition from classical rigid blade modeling, to a complete
framework for rotor aeroelasticity analysis, without resorting to computationally expensive
FEA or multi-body dynamics. The implementation of the described approach does not require
any external dependencies or computational infrastructure and can be realised within less than
a thousand lines of FORTRAN code. It is shown that, execution times required for a complete
analysis, including modal content reaching up to the fifth mode for all DOFs, may be constrained
to less than 0·6 seconds on a low-end personal computer.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
869
3.0Theoretical Model Development
3.1Derivation of assumed deformation functions
In order to utilise the Lagrangian equation of motion, a finite series of assumed deformation functions
is required with respect to the blade’s flap/lag transverse displacement and torsion. These can be
obtained by treating the rotor blade as a non-rotating solid beam of uniform structural properties
and subsequently applying the classical Bernoulli-Euler beam and torsional vibration theories. Due
to the potential existence of an actual hinge/root offset from the centre of rotation, it is deemed
appropriate to define an effective modal ordinate as the spatial independent variable based on the
local beam radius r ∈ (eR, R), where e is the hinge/root offset as a fraction of rotor blade radius R.
The effective modal ordinate is defined as x = r – eR, x ∈ (0,l), where l = R(1 – e) is the actual blade
length. This transformation is performed in order to ensure correct application of boundary conditions.
The governing equation for the time-dependent transverse displacement w(x,t) of a non-rotating
beam with variable bending stiffness EI(x) and mass per unit length ρA(x), subjected to a vertical time
varying distributed load per unit length P(x,t), is a fourth order Partial Differential Equation (PDE):
2
2 w( x, t )
2 w( x, t )
( EI ( x)
) A( x)
= P ( x, t )
2
2
x
x
t 2
. . . (1)
where t is time in seconds. The corresponding governing equation for the torsional deformation
angle θ(x,t), of a non-rotating body of variable torsional rigidity GJ(x) and polar moment of inertia
per unit length ρIp(x), subjected to unsteady torsional moment loads per unit length M(x,t), is a
second order PDE:
( x, t )
2 ( x, t )
(GJ ( x)
) M ( x, t ) = I p ( x)
x
x
t 2
. . . (2)
At this point, constant values of ρA(x), ρIp(x), EI(x), and GJ(x) along x are assumed. Representative
values of structural properties are selected at the blade mid-span location x = l/2. In order to obtain
the natural frequencies and mode shapes of the idealised non-rotating structure, the eigenproblem
has to be formulated. This is achieved through application of free vibration conditions by setting
P(x,t) = 0 and M(x,t) = 0 in Equations (1)-(2) respectively. This leads to the expressions:
4 w( x, t )
2 w( x, t )
=0
EI midspan
A
midspan
x 4
t 2
. . . (3)
2 ( x, t )
2 ( x, t )
= I p ,midspan
GJ midspan
2
x
t 2
. . . (4)
Assuming that Equations (3)-(4) are separable in terms of space x and time t, the transverse
displacement w(x,t) and torsional deformation angle θ(x,t) can be re-written as:
w( x, t ) = ( x) Q w (t )
. . . (5)
( x, t ) = ( x) Q (t )
. . . (6)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
870
The Aeronautical Journal
August 2014
where Φ(x), Θ(x) are the spatial mode shapes and Qw(t), Qθ(t), are time-dependent generalised
coordinates. The mode shapes for transverse displacement and torsion can be acquired from the
solution of the spatial parts of Equations (3)-(4) in that order, giving:
4 ( x) 4
( x) = 0
x 4
. . . (7)
2 ( x ) 2
( x ) = 0
x 2
. . . (8)
where β, γ are the Bernoulli-Euler and torsional vibration frequency parameters respectively.
These are essentially defined as:
A
4 = midspan 2B
EI midspan
GJ midspan
2 = ( T )2 , c =
I p ,midspan
c
. . . (9)
. . . (10)
with ωB, ωT being the natural frequencies of vibration for transverse displacement and torsion
respectively. Equations (7)-(8) have known solutions of the form:
( x) = ASinx BCosx CSin h x DCos h x
. . . (11)
( x) = ACosx BSinx
. . . (12)
Equations (11)-(12) provide the transverse displacement and torsional mode shapes of the idealised
structure, for designated frequency parameters β, γ. The parameters A, B, C and D are constants of
integration that are determined through application of the appropriate boundary conditions. Those
are essentially defined by the rotor blade’s hub support. Applying the corresponding boundary
conditions at the blade hub (x =0) and tip (x = l) modal ordinates within Equations (11)-(12),
results in the formation of the corresponding linear systems of equations:
A Bernoulli x Bernoulli = 0
. . . (13)
ATorsion xTorsion = 0
. . . (14)
where and xBernoulli = (A B C D)T and xTorsion = (A B)T .The matrices ABernoulli, ATorsion contain coefficients that depend on the frequency parameters β, γ as well as on beam length l.
In order for Equations (13)-(14) to have non-trivial solutions, the determinants of ABernoulli,
ATorsion must be equal to zero:
det A Bernoulli = 0
. . . (15)
det ATorsion = 0
. . . (16)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
871
Solution of Equations (15) and (16) provides the frequency parameters β, γ, required for determination of the corresponding mode shapes. Equations (15) and (16) are transcendental equations
with infinite solutions that are evaluated numerically for the first N mode shapes to be included in
the Lagrangian analysis. Subsequent use of Equations (13) and (14) leads to the ratios between
the integration constants.
Reference (34) discusses the application of the corresponding boundary conditions for hingeless,
freely-hinged, and spring-hinged articulated rotor blades. The torsional vibration case is also
elaborated considering configurations employing pitch-control systems of infinite as well as finite
torsional stiffness. A brief summary is provided below, along with readily implementable closed
form expressions for the direct analysis of all rotor blade configurations mentioned above.
3.1.1 Hingeless rotor blades
Application of boundary conditions corresponding to a hingeless rotor blade, leads to the following
closed form expression for Equation (15):
CoslCos h l 1 = 0
. . . (17)
The integration constants C and D within xBernoulli are essentially zero. The ratio of the remaining
non-zero integration constants is given by:
B
Sinβ l Sin h β l Cosβ l Cos h β l
=
A
Cosβ l Cos h β l Sin h β l Sinβ l
. . . (18)
3.1.2 Freely-hinged articulated rotor blades
Considering the boundary conditions corresponding to a freely-hinged articulated rotor blade,
Equation (15) results in the following closed form expression:
. . . (19)
Sin h lCosl Sin lCos h l = 0
The integration constants B and D within xBernoulli are essentially zero. The ratio of the non-zero
integration constants is given by:
C
Sinl Cosl
=
A Sin h l Cos h l
. . . (20)
For the specific set of imposed boundary conditions, the Bernoulli-Euler beam has a rigid body
mode of motion which corresponds to ωB = β = 0. Setting β = 0 in Equation (7) results in the
following rigid body mode shape:
Φ( x) = Ax
. . . (21)
3.1.3 Spring-hinged articulated rotor blades
As regards the case of a spring-hinged articulated rotor blade employing a spring with stiffness
K at the hub, Equation (15) leads to the following closed form expression:
K (1 CoslCos h l ) EI midspan(CoslSin h l Cos h lSinl ) = 0
. . . (22)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
872
The Aeronautical Journal
August 2014
The ratios of the integration constants contained in xBernoulli for a value of β that satisfies Equation
(22), are given by the following closed form expressions:
Sinl
Sin h l
B=
A
Cosl Cos h l 2 EI midspan
Sin h l
K
1
2 EI midspan B KA
C=
K
D = –B
. . . (23)
. . . (24)
. . . (25)
3.1.4 Rotor blade pitch-control system with infinite torsional stiffness
Considering the torsional vibration case where a pitch-control system of theoretically infinite
stiffness is employed, application of the respective boundary conditions in Equation (12) leads to:
BCos( l ) = 0 Cos( l ) = 0
. . . (26)
with A = 0 and Bγ ≠ 0. The corresponding mode shapes are given by Equation (12) by setting A = 0.
3.1.5 Rotor blade pitch-control system with finite torsional stiffness
Application of boundary conditions corresponding to a pitch-control system with finite torsional
stiffness Ktorsion in Equation (12), leads to the following condition:
K torsion
Cosγ l − γ Sinγ l = 0
GJ midspan
The ratio between the integration constants in xTorsion is:
B
K torsion
=
A GJ midspan γ
. . . (27)
. . . (28)
3.1.6 Normalisation of assumed mode shapes
Application of a normalisation condition results in the final transverse displacement and torsion mode
shapes for designated frequency parameters β and γ. The normalisation conditions used within this
paper, with respect to the cases of transverse displacement and torsion can be expressed as follows:
l
2
. . . (29)
0Amidspan ( x)dx = 1
l
l
2
0 ( x)dx = 2
. . . (30)
The aforementioned process is applied for the N first mode shapes with respect to the cases
of flap/lag bending and torsion. The acquired modes are subsequently transferred from
the effective modal ordinate domain x, to the beam element local radius domain r and are
φiflap (r ), φlag
φtorsion
(r ), i = 1,...N . Thus, the N first deformation modes for
expressed as i ( r ),
i
flap-lag-torsion, with respect to an idealised non-rotating structure with constant bending stiffness,
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
873
torsional rigidity, mass per unit length, and polar moment of inertia distribution along the beam
radius, are obtained. The acquired functions are orthogonal with one another, they comply with the
structure’s boundary conditions, they are relatively good approximations to the actual mode shapes
of the nonuniform-rotating structure(27), and their derivatives with respect to r readily available in
analytical form. Hence, they are deemed excellent candidates for use as assumed deformations
functions in Lagrange’s equation of motion.
3.2Lagrangian formulation for rotor blade flap-lag-torsion dynamics
Having derived a finite series of well-conditioned assumed deformation functions, the Lagrangian
problem can be formulated. This process requires that the strain and kinetic energy of the system,
as well as the virtual work done by the external forces and moments, are expressed as functions of
generalised coordinates. The rotor blade is now treated as a continuous system of variable bending
stiffness, torsional rigidity, polar moment of inertia, and mass per unit length along the blade radius.
Neither elastic, nor inertial or aerodynamic coupling between flap-lag-torsion dynamics is accounted
for within the formulation described in this paper. The proposed approach is predominantly
designated for dynamic response analyses in the time domain where any imposed aerodynamic
or nonlinear inertial coupling loads (such as due to Coriolis acceleration) are essentially treated
as a time-history of external forcing. All three DOFs are therefore approached separately. Instead
of the local modal ordinate , the local beam radius is used as the independent spatial variable.
Lagrange’s equation of motion(28) for a system whose space configuration can be expressed by
a finite series of time-dependent generalised coordinates qi(t), i = 1, ...N dictates that:
d T
T U
( )
= Qi , i = 1,...N
dt qi qi qi
. . . (31)
where T and U are the kinetic and strain energy of the system in that order, while Qi is the generalised
external force corresponding to the ith coordinate. Expressing the time-dependent transverse
displacement for flap-lag bending motion wflap/lag(r,t), along with the torsional deformation angle
θ(r,t), in terms of the finite series of assumed modal functions obtained from Bernoulli-Euler beam
and classical torsional vibration theory respectively, gives:
N
. . . (32)
w flap (r , t ) = iflap (r )qiflap (t )
i =1
N
wlag (r , t ) = ∑φilag (r )qilag (t )
(r , t ) = torsion
(r )qitorsion (t )
i
. . . (33)
i =1
N
. . . (34)
i =1
where qi flap(t), qi lag(t) and qitorsion(t) are generalised coordinates expressing the contribution of the
assumed modal functions on the blade’s flap-lag transverse displacement and torsional deformation
respectively. Assumption of small deformations allows to set T
qi
0
d T
U
( )
= Qi , i = 1,...N
dt qi
qi
in Equation (31) which becomes:
. . . (35)
The next step is to express the blade’s strain and kinetic energy as functions of the defined
generalised coordinates. For the formulation presented in this paper, the assumed kinetic energy
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
874
The Aeronautical Journal
August 2014
includes only terms associated with the first derivatives of transverse displacement and torsional
deformation, considering the respective DOFs. This is due to the fact that, any inertial terms
related to the blade’s rotation are meant to be treated as external forcing. The virtual work done
on the blade due to them, is therefore calculated independently. The blade’s strain and kinetic
energy are therefore given by:
1 R
1
U flap/lag = EI flap/lag (r )( w'' flap/lag (r , t )) 2 dr K flap/lag ( w'' flap/lag (eR, t )) 2
. . . (36)
eR
2
2
1 R
1
U torsion = GJ (r )(' (r , t )) 2 dr K torsion 2 (eR, t )
eR
2
2
. . . (37)
1 R
T flap/lag = A(r )( w flap/lag (r , t )) 2 dr
2 eR
. . . (38)
1 R
T torsion = I p (r )( (r , t )) 2 dr
2 eR
. . . (39)
1
K flap/lag ( w'flap/lag (eR, t )) 2 has been included in the Right-Hand Side (RHS) of Equation
The term 2
(36), in order to account for the added strain energy in the system due to the existence of a discrete
spring K flap/lagwith stiffness at the blade hinge location (r = eR) for the case of a spring-hinged
articulated rotor. For a hingeless or a freely-hinged articulated rotor, the specific term can be
1 torsion 2
K
θ (eR, t ) in the RHS of Equation (37), represents
removed from the analysis. The term 2
the strain energy of the pitch-control system in the case of specifying finite torsional stiffness
Ktorsion at the blade root/hinge location (r = eR).
Substituting Equations (32)-(34) in Equations (36)-(39) results in the following expressions:
1 N N
/lag/torsion flap/lag/torsion
U flap/lag/torsion = ki ,flap
qi
(t )q jflap/lag/torsion (t )
j
2
i =1 j =1
. . . (40)
1 N N flap/lag/torsion flap/lag/torsion
flap/lag/torsion
(t )q j
qi
(t )
∑∑ fi, j
2 i =1 j =1
1 N N
/lag/torsion flap/lag/torsion
T flap/lag/torsion = ∑∑miflap
qi
(t )q jflap/lag/torsion (t )
,j
2 i =1 j =1
. . . (41)
The inter-modal coupling coefficients within Equations (40), (41) are defined as follows:
R
/lag
/lag
. . . (42)
miflap
= A(r )iflap/lag (r ) flap
(r )dr
,j
j
eR
R
/lag
ki ,flap
= EI flap/lag (r )i'' flap/lag (r )''j flap/lag (r )dr
j
eR
. . . (43)
/lag
/lag
fi ,flap
= K flap/lag φi'flap/lag (eR )φ'flap
(eR )
j
j
. . . (44)
mitorsion
= I p (r )torsion
(r )torsion
(r )dr
,j
i
j
R
eR
. . . (45)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
875
Ω
Z
eR+(r-eR)cosβ(r,t)
dF=dFx
dm
wflap(r,t)
β(r,t)
Y
a)
X
r-eR
Ω
(r-eR)cosζ(r,t)
eR
ζeff(r,t)
Z
uflap(r,t)
(r-eR)cosβ(r,t)
r-eR
eR
X
ulag(r,t)
ζ(r,t)
wlag(r,t)
dFx
ζeff(r,t)
dm
dFy
2
dF = dFx + dFy
2
Y
b)
Rotating blade
Elastic axis
dr
Ω
δ
Z
dm
δ = arcsin(
Yoffset (r )
2
(r )
r 2 + Yoffset
dm = ρA(r )dr
dFcentr
)
dm
δ
dFcentr , y
dFcentr
dFcentr ≈ ρA(r )Ω rdr
dFcentr , y = dFcentr sin δ
X
dFcentr , x
2
Y
Yoffset (r )
r
δ ≈ arcsin(
Yoffset (r )
r
)
2
dFcentr , y ≈ ρA(r )Ω Yoffset (r )dr
c)
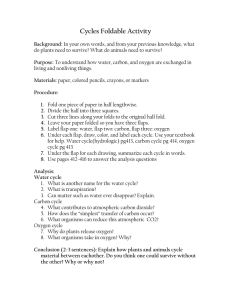
Figure 1. Beam element kinematics: (a) Flap bending motion, (b) Lag bending motion,
(c) Centrifugal force component due to centre mass offset Yoffset(r) from the elastic axis.
R
kitorsion
= GJ (r )i'torsion (r )'torsion
(r )dr
,j
j
. . . (46)
fi ,torsion
= K torsion φtorsion
(eR )φtorsion
(eR )
j
i
j
. . . (47)
eR
/lag
/lag
/lag
miflap
, ki ,flap
and fi ,flap
where
are the inertial, elastic, and hub-spring inter-modal coupling coeffi,j
j
j
cients respectively between the ith and jth assumed modes of motion for flapwise and lagwise
bending. The coupling coefficient fi,jflap/lag is non-zero, only for the case of an articulated rotor with a
, kitorsion
, and fi ,torsion
discretely defined hub spring. The coefficients m
itorsion
and express the inertial, elastic,
,j
,j
j
and torsional-spring inter-modal coupling respectively, between the ith and jth assumed modes of
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
876
The AeronAuTicAl JournAl
AugusT 2014
Z
M+
θ (r , t )
Yoffset (r )
torsion
dM centr
Y
z
X
dm
z = Yoffset (r ) sin ϑ (r , t )
dFcentr , y
torsion
dM centr
= −dFcentr , y z ⇒
2
torsion
dM centr
≈ − ρA(r )Ω 2Yoffset
(r )θ (r , t )dr
Figure 2. Blade element kinematics for torsional vibration.
torsion
mitorsion
, kiThe
,term
and fi ,torsion
motion considering torsional vibration.
is non-zero, only with respect to the case
,j
,j
j
of finite pitch-control system torsional stiffness. Equations (40) and (41) essentially express the
blade’s strain and kinetic energy as functions of time-dependent generalised coordinates for the
cases of flap/lag bending and torsion.
3.3 derivation of generalised centrifugal force and moment expressions for
flap-lag-torsion
The next step is to obtain closed form expressions for the virtual work done by the centrifugal
force acting on the rotating blade within each DOF. Figures 1, (a) and (b) illustrate the kinematics
of a beam element of mass dm = ρA(r)dr and local radius r, for flapwise and lagwise bending
respectively. The centrifugal force is directed outwards and away from the centre of rotation.
Figure 1, (a) shows that for the case of flapwise bending, the external centrifugal force component
acts only in the direction of the X axis, hence dF = dFx. Therefore dF produces work only when
the beam element is displaced on the X axis (uflap(r,t)). For the case of lagwise bending, Fig. 1,
(b) demonstrates that there are force components on both X and Y axes (dFx and dFy respectively
with dF = dFx2 + dFy2 ). Thus, work is done when the beam element is displaced on both dimensions
(ulag(r,t) and (wlag(r,t) correspondingly). Figure 1(c) demonstrates that, for the case that there is
an effective offset Yoffset(r) of the beam element’s centre mass from the elastic axis, a centrifugal
force component dFcentr,y appears pointing towards the direction of the Y axis. Figure 2 shows that,
for a given torsional deformation angle θ(r,t), the centrifugal force component dFcentr,y produces a
torsion
torsional moment dMcentr
about the elastic axis, which effectively tends to twist the blade element
to zero pitch angle.
The virtual work done by the centrifugal force on the entire blade within each DOF, due to the
elementary displacements δuflap(r,t), δlag(r,t), δwlag(r,t) and torsional deformation δθ(r,t), is given
by the following expressions:
R
W flap = u flap (r , t )dFx flap
eR
R
R
eR
eR
W lag = u lag (r , t )dFxlag wlag (r , t )dFy
. . . (48)
. . . (49)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
877
Z
w ' (r , t )
duz
w ' ( r , t ) dr
dux
w ' (r , t )
Y
dm
dr
X
Figure 3. Elementary dislocations of a beam element for flap bending motion.
R
torsion
W torsion = (r , t )dM centr
eR
. . . (50)
where dFxflap/lag are the X axis centrifugal force components for the flap and lag case respectively.
(δwlag (r , t )) 2
has been omitted in formulating
2
It is noted that a nonlinear term proportional to Equation (49). Expressing Equations (48)-(50) in terms of generalised coordinates gives:
N
. . . (51)
W flap/lag/torsion = Qi flap/lag/torsionδ qiflap/lag/torsion
i =1
where Q
are the generalised external forces and moments corresponding to the generalised
coordinates q
for blade flap, lag, and torsion respectively. They are defined as:
flap
R u
(r , t )
. . . (52)
dFx flap , i = 1,...N
Qi flap =
eR
qiflap
flap/lag/torsion
i
flap/lag/torsion
i
lag
lag
R w
R u
(r , t ) lag
(r , t )
d
dFy , i = 1,...N
Qilag =
F
x
lag
lag
eR
eR
qi
qi
. . . (53)
R ( r , t )
torsion
dM centr
Qitorsion =
, i = 1,...N
eR q torsion
i
. . . (54)
It can be shown from Figs 1 (a) – (c) and Fig. 2 that:
dFx flap = A(r ) 2 (eR (r eR)Cos(r , t ))dr
. . . (55)
dFxlag = A(r ) 2 (eR (r eR)Cos (r , t ))dr
. . . (56)
wlag (r , t )
dFy = A(r ) 2 DSin (arc Sin
) dr
D
. . . (57)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
878
The Aeronautical Journal
August 2014
Figure 4. Relative frequency error ε for the case of transverse displacement: a) Hingeless blade boundary
conditions, b) Spring-hinged articulated blade boundary conditions (A logarithmic scale is used for clarity).
dFz = 0 . . . (58)
. . . (59)
torsion
2
dM centr
= A(r ) 2Yoffset
(r )Sin(r , t )dr
where Ω is the nominal rotorspeed in rad/sec and D is the distance of beam element dm from the
(r , t ) = arcSin
rotation axis as shown in Fig. 1(b). The values wlag (r , t )
w flap (r , t )
(r , t ) = arcSin
and
r eR
r eR
are the effective beam element lap and lag angles respectively. Having assumed small displacements
with regards to wflap, wlag and θ(r,t), and , it can be considered that Cosβ(r,t) ≈ 1, and Cosζ(r,t) ≈ 1
and Sin θ(r,t) ≈ θ(r,t) . Equations (55)-(59) therefore give:
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
879
dFx dFx flap = dFxlag A(r ) 2 rdr
. . . (60)
dFy = A(r ) 2 wlag (r , t )dr
. . . (61)
torsion
2
dM centr
A(r ) 2Yoffset
(r )(r , t )dr
. . . (62)
It is noted that no approximation is made with regards to dFy.
Having obtained closed form approximations for the differential centrifugal force and
torsion
2
moment components dFxflap/lag, dFy and dM centr
,what
in
A(rremains
) 2Yoffset
(r )order
(r , t )to
dr acquire expressions
for the generalised forces given by Equations (52)-(54), is the designation of the partial derivatives
flap
u
(r , t ) u lag (r , t ) wlag (r , t )
θ (r , t )
qiflap (t )
,
qilag (t )
,
qilag (t )
, and
qitorsion (t )
i 1,...N .
Figure 3 presents the elementary dislocations during flapwise bending for a straight-line beam
element of infinitesimal length dr. It is illustrated that, for a first spatial derivative of transverse
displacement equal to w′(r,t), there is an inboard total dislocation within the infinitesimal radial
distance dr. The components of du along the X and Z axes are defined as dux and duz respectively.
It can be shown from Fig. 3 that:
. . . (63)
du = dr ( 1 w' (r , t ) 2 1)
du x = du Cos w' (r , t )
. . . (64)
du z = du Sin w' (r , t )
. . . (65)
The dislocation component dux is of interest both for flap and lag bending motion. This is due to
the fact that there are centrifugal force components acting on the X axis considering both DOFs.
Expanding Equation (63) using a McLaurin series up to the first term gives:
1
du ≈ w' (r , t ) 2 dr
2
. . . (66)
Assuming small w′(r,t), Equation (64) leads to dux ≈ du. A similar analysis can be conducted for
the lag DOF yielding similar expressions for du and dux. Integration of Equation (66), starting
from the beam root/hinge location (r = eR) up until the local beam element radius r, provides the
total displacement of a beam element on the X axis for flap and lag bending motion respectively:
1 r
u flap/lag (r , t ) = w'flap/lag (, t ) 2 d
2 eR
. . . (67)
where ξ is an independent spatial integration variable. The negative sign has been added in front
of the RHS of Equation (67) to signify the inboard nature of the dislocation considering both
DOFs. This convention essentially leads to negative X axis differential displacement for positive
values of w′(r,t) and vice-versa.
The terms uflap and ulag can now be expressed as functions of generalised coordinates. Substitution
of Equations (32)-(33) into Equation (67) leads to the following expression:
1 N N
/lag
u flap/lag (r , t ) = aiflap
(r )qiflap/lag (t )q jflap/lag (t )
,j
2 i =1 j =1
. . . (68)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
880
The Aeronautical Journal
August 2014
where the parameters ai,jflap(r) and ai,jlag(r) are defined as follows:
r
/lag
/lag
aiflap
(r ) = i'flap/lag ()'flap
()d
,j
j
eR
. . . (69)
Derivation of Equations (68), (33) and (34) with respect to their generalised coordinate (qiflap(t),
qilag(t), qitorsion(t) and for flap-lag-torsion in that order) gives:
N
u flap (r , t )
flap
. . . (70)
= aiflap
(t )
, j (r )q j
flap
qi (t )
j =1
N
u lag (r , t )
lag
=
ailag
, j ( r ) q j (t )
qilag (t )
j =1
. . . (71)
wlag (r , t )
= lag
i (r )
qilag (t )
. . . (72)
(r , t )
= torsion
(r )
i
qitorsion (t )
. . . (73)
for i = 1, ...N. Combining Equations (70)-(73) and Equations (52)-(54) results in closed form
expressions for the generalised centrifugal external forces and torsional moments as functions of
generalised coordinates:
N
/lag/torsion flap/lag/torsion
Qi flap/lag/torsion = I i ,flap
qj
(t ), i = 1,...N
. . . (74)
j
j =1
lag
torsion
where I flap
are the effective centrifugal stiffening inter-modal coupling coefficients
i,j , I i,j , and I i,j
for flap-lag-torsion respectively which are defined as follows:
R
r
eR
eR
2
'flap
I i ,flap
()'flap
j = A( r ) r i
j ()ddr
2
'lag
lag
'lag
2 lag
I ilag
, j = A( r ) r i () j ()ddr A( r ) i ( r ) j ( r )dr
2
I itorsion
= A(r ) 2Yoffset
(r )torsion
(r )torsion
(r )dr
,j
i
j
R
r
R
eR
eR
eR
R
eR
. . . (75)
. . . (76)
. . . (77)
3.4Eigenproblem formulation and solution
Substituting the acquired expressions for strain and kinetic energy from Equations (40) and
(41) along with the generalised centrifugal force and moments expressions from Equation (74)
into Equation (35), results in the following systems of ODEs describing flap, lag, and torsional
vibration respectively:
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
N
m
j =1
N
flap/lag/torsion
i, j
j =1
qjflap/lag/torsion (t )
( k
881
flap/lag/torsion
i, j
f
flap/lag/torsion
i, j
I
flap/lag/torsion
i, j
)q
. . . (78)
flap/lag/torsion
j
(t ) = 0, i = 1,...N
Assuming periodic motion, we can consider a potential solution for the ith generalised flap-lagtorsion coordinate of the form: qi = qi Sin(ωit + ψi). Substituting the aforementioned expression
in Equation (78) results in the following systems of equations:
N
(ω
) m
)q
(G
j =1
flap/lag/torsion
i, j
i
flap/lag/torsion 2
flap/lag/torsion
i, j
flap/lag/torsion
j
= 0, i = 1,...N
. . . (79)
where ωiflap/lag/torsion is the natural frequency of the mode for flap, lag, and torsional vibration in
that order. G i,jflap/lag/torsion = k i,jflap/lag/torsion + f i,jflap/lag/torsion + I i,jflap/lag/torsion, is the overall effective stiffness
coupling coefficient between the ith and jth assumed modes of flap-lag-torsion, including elastic
ki,j, hub-spring/pitch-control system fi,j, and centrifugal stiffening effects Ii,j.
Equation (79) essentially describes the formulated eigenproblem whose solution leads to the
determination of the system’s N first natural frequencies (ω iflap/lag/torsion), i = 1, ...N) and mode
shapes for flap, lag, and torsional vibration. Arranging Equation (79) in matrix notation leads to
the following expression:
flap/lag/torsion
A Lagrange
q flap/lag/torsion = 0
. . . (80)
T
where q = [q1 , q2 ,...qN ] with respect to the flap, lag, and torsion cases respectively, while
flap/lag/torsion
flap/lag/torsion
A Lagrange
square =symmetric
matrices of size N.
qare
0
In order for Equation (80) to have non-trivial solutions, the following condition needs to apply:
flap/lag/torsion
det A Lagrange
=0
. . . (81)
Equation (81) is another transcendental equation that can be evaluated numerically. This can
be achieved through marching within the ωiflap, ωilag, ωitorsion and domains respectively, until the
first N values of ωi flap/lag /torsion i = 1, ...N that satisfy Equation (81) are obtained. The vectors
flap
torsion
A Lagrange
, A lag
qiflap , qilag , qitorsion , i = 1,...N are essentially eigenvectors of matrices
Lagrange and A Lagrange
flap/lag/torsion
(when the corresponding mass matrices M
, which contain the inertial inter-modal coupling
coefficients m flap/lag/torsion
,
are
used
for
weighting
instead
of the unit matrix) and are associated with
i,j
Ωiflap/lag/torsion respectively.
flap
torsion
A Lagrange
, A lag
Since
Lagrange and A Lagrange are square symmetric matrices, their eigenvectors are orthogonal
with one another. The eigenvector orthogonality condition dictates that:
{q flap/lag/torsion }Ti M flap/lag/torsion {q flap/lag/torsion } j = 0, i ≠ j , i, j = 1,...N
. . . (82)
The final N first mode shapes of the nonuniform rotating blade, are provided as the dot products of
flap/lag/torsion
flap/lag/torsion
the assumed mode shape vectors and the eigenvectors of matrices A
.qThis
yields:= 0
Lagrange
X i flap/lag/torsion (r ) = flap/lag/torsion (r ) {q flap/lag/torsion }Ti , i = 1,...N
. . . (83)
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
882
The Aeronautical Journal
1st Mode
3rd Mode
5th Mode
7th Mode
9th Mode
10 −5
August 2014
2nd Mode
4th Mode
6th Mode
8th Mode
10th Mode
Relative frequency error η
4.870
4.868
4.866
4.864
4.862
4.860
0
Relative frequency error η
10 −5
2
4
6
8
10
12
Number of assumed mode shapes N
a)
9
8
7
6
5
4
0
b)
2
4
6
8
10
12
Number of assumed mode shapes N
Figure 5. Relative frequency error η for the case of torsional deformation: (a) Infinite
pitch-control system torsional stiffness, (b) Finite pitch-control system torsional stiffness.
where Φ(r) = (φj(r), j = 1, ...N)T are the assumed mode shape vectors for flap-lag-torsion respectively. It is shown in Ref. 34 that the orthogonality between the acquired eigenvectors of matrices
flap
lag
torsion
A
Lagrange , A Lagrange and A Lagrange and due to their symmetric nature, also leads to the orthogonality of
the acquired mode shapes given by Equation (83). Therefore, it applies that:
R
flap/lag
flap/lag
A(r ) X i (r ) X j (r )dr = 0, i j, i, j = 1,...N
torsion
torsion
I p (r ) X i (r ) X j (r )dr = 0, i j, i, j = 1,...N
eR
R
eR
. . . (84)
. . . (85)
The conditions expressed by Equations (29)-(30), used for the amplitude normalisation of the
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
883
assumed modal functions, are also incorporated in order to acquire the amplitude of the final mode
shapes given by Equation (83), thus giving:
R
2
flap/lag
eRA(r )( X i (r )) dr = 1, i = 1,...N
. . . (86)
R
l
2
torsion
∫eR( X i (r )) dr = 2 , i = 1,...N
. . . (87)
3.5Rotor blade model generation and analysis
The overall data required by the proposed approach for the generation and analysis of a complete
rotor blade model, broadly comprises information related to general dimensions, boundary
conditions, structural properties, as well as the operating conditions of the blade. As regards data
related to general dimensions, only values for the the blade radius R and any potential hinge-offset
ratio e (yielding the actual blade length l = (1 –e)R)) are required. This information is initially
utilised during the derivation of assumed deformation functions through the application of classical
methods. The rotor blade’s boundary conditions are taken into account through application directly
within Bernoulli-Euler beam and classical torsion theories.
Data related to the structural properties of the blade in terms of radial distributions of mass and
polar mass moment of inertia per unit length (ρA(r) and ρIp(r)), flapwise and lagwise bending
stiffness (EIflap/lag(r)), torsional rigidity (GJ(r)), and any potential hub spring stiffness (Kflap/lag/torsion),
is also required. This information is used in combination with the aforementioned data on general
blade dimensions, for the evaluation of the definite integrals corresponding to the inertial, elastic,
and hub-spring inter-modal coupling coefficients (mi,j, ki,j, and fi,j) between the ith and jth assumed
modes of motion as expressed by Equations (42)-(47).
Since the current approach is aimed towards estimating the natural vibration characteristics of
a nonuniform rotating blade in vacuum, the only required information considering the operating
conditions of the blade is rotorspeed Ω. No aerodynamic loads are considered at this point since they
are meant to be treated as external forcing during a dynamic response analysis along with nonlinear
inertial coupling loads (such as due to Coriolis acceleration). Rotorspeed is utilised, along with the
radial distribution of aerofoil centre mass offset from elastic axis (Yoffset(r))), for the numerical evaluation of the definite integrals expressing the centrifugal stiffening inter-modal coupling coefficients
between ith the jth and assumed modes of motion as stated by Equations (75)-(77).
Having utilised the required rotor blade data for the evaluation of the aforementioned definite
integrals, the corresponding mass and effective stiffness matrices (Mflap/lag/torsion and Gflap/lag/torsion
respectively) can be populated for each DOF. The computational procedure described in section
‘Eigenproblem formulation and solution’ can be subsequently be deployed leading to the estimation
of the natural frequencies and mode shapes corresponding to each DOF.
4.0Results and Discussion
4.1Lagrangian approximation error
In order to evaluate the influence of the Lagrangian linearisation assumption , (
T
0) on the
qi
accuracy of the proposed method, a comparative evaluation has been carried out between the
exact Bernoulli-Euler beam/classical torsional vibration theories and the approximate Lagrangian
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
The Aeronautical Journal
Normalized mode frequency ω/Ω
884
1st Flap
3rd Flap
5th Flap
40
30
25
20
15
10
5
0
0
Normalized mode frequency ω/Ω
2
4
6
8
10
12
14
16
Number of assumed mode shapes N
1st Lag
3rd Lag
5th Lag
60
2nd Lag
4th Lag
50
40
30
20
10
0
0
2
4
6
8
10
12
14
16
Number of assumed mode shapes N
b)
Normalized mode frequency ω/Ω
2nd Flap
4th Flap
35
a)
c)
August 2014
1st Torsion
3rd Torsion
5th Torsion
80
2nd Torsion
4th Torsion
70
60
50
40
30
20
10
0
0
2
4
6
8
10
12
14
16
Number of assumed mode shapes N
Figure 6. Influence of number of assumed deformation functions on the normalised
modal frequencies of the articulated rotor blade model described in Ref. 35,
Ω = 69 rad/sec (660rpm): (a) Flap modes, (b) Lag modes, (c) Torsion modes.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Normalized mode frequency ω/Ω
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
1st Flap
3rd Flap
5th Flap
250
225
200
175
150
125
100
75
50
25
0
0
Normalized mode frequency ω/Ω
6
8
10
12
1st Lag
3rd Lag
5th Lag
250
225
200
175
150
125
100
75
50
25
0
0
14
16
2
4
6
2nd Lag
4th Lag
8
10
12
14
16
Number of assumed mode shapes N
b)
Normalized mode frequency ω/Ω
4
2nd Flap
4th Flap
Number of assumed mode shapes N
a)
1st Torsion
3rd Torsion
5th Torsion
80
2nd Torsion
4th Torsion
70
60
50
40
30
20
10
0
0
c)
2
885
2
4
6
8
10
12
14
16
Number of assumed mode shapes N
Figure 7. Influence of number of assumed deformation functions on the normalised
modal frequencies of the hingeless rotor blade model described in Ref. 36:
Ω = 105 rad/sec (1,000rpm) (a) Flap modes, (b) Lag modes, (c) Torsion modes.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
886
The Aeronautical Journal
August 2014
formulation. Modal characteristics obtained from application of the former have been deployed
as assumed deformation functions in the latter. Figures 4 and 5 present the Lagrangian method’s
relative errors ε/η , regarding the predicted natural frequencies for the first ten modes of motion of
a uniform non-rotating structure, considering transverse displacement and torsional deformation
respectively. The relative frequency errors ε and η are defined as follows:
| Lagrange Bernoulli
|
B
= B
Bernoulli
B
. . . (88)
| Lagrange TClassical |
= T
TClasssical
. . . (89)
With respect to the transverse displacement case, results are presented for boundary conditions
corresponding to a hingeless (Fig. 4(a) and a spring-hinged articulated rotor blade (Fig. 4(b). As
regards blade torsion, Fig. 5(a) presents frequency errors corresponding to boundary conditions
dictating infinite pitch-control system torsional stiffness, while a finite value of Ktorsion is assumed
for the calculations presented in Fig. 5(b). The influence of the total number of deployed assumed
deformation functions N on each mode’s relative frequency error, is also demonstrated considering
both rotor blade configurations and DOFs.
It is observed from Fig. 4 that ε never exceeds a value of 7·6 × 10–5 and 3 × 10–5 for hingeless
and spring-hinged articulated blade boundary conditions, respectively. For the case of a hingeless
rotor blade, Fig. 4(a) shows that ε is of the same order of magnitude for all modes, decreasing
slightly with increasing mode number. A small increase of ε with the number of assumed functions
deployed in the Lagrangian eigenproblem is observed for all modes. However, it is believed that
this behaviour is numerical rather than mathematical in nature. As such, it is not related to the
Lagrangian linearisation assumption, but to the influence of imposing cantilever boundary conditions
on the numerical evaluation of the definite integrals expressed by Equations (42)-(47) and (75)-(77).
Application of cantilever (hingeless) boundary conditions essentially leads to more mathematically
complex modes of transverse displacement, in comparison to the case where hinged (articulated)
conditions are assumed. It is clarified that for a uniform, non-rotating, articulated blade, the
first mode of displacement can be expressed as a linear function while the second mode can be
accurately approximated using a second-order polynomial expression. However, for the case of a
hingeless blade, third and sixth order polynomial functions are required respectively, in order to
approximate the first and second modes of transverse displacement with satisfying accuracy. This
complexity is amplified with increasing mode number. As such, it is realised that the hingeless case
is considerably more complex in terms of mathematical representation. Thus, refinement of the
Lagrangian eigenproblem through increasing the number of assumed modes, essentially results in
more complex integral expressions given by Equations (42)-(47) and (75)-(77). This effectively
leads to a corresponding increase in the numerical error associated with their evaluation. However,
it is emphasised that the overall range of this increase is roughly two order of magnitude below the
respective absolute values of ε. Specifically, it can be observed that ε increases approximately by
2 × 10–7per mode for including up to twelve admissible functions, which can be considered negligible.
For the case of a spring-hinged articulated rotor blade, Fig. 4(b) demonstrates the much larger
difference in ε between mode shapes reaching roughly two orders of magnitude. A logarithmic scale
is used for clarity. Again, there is but an infinitesimal variation of ε with the number of deployed
assumed functions for each mode. It can be noticed that ε decreases rapidly with increasing mode
number, which is partially due to the also increasing non-dimensionalising head in Equation (88).
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
Flap
Lag
887
Torsion
Computational time (sec)
4
3
2
1
0
5
10
15
20
25
30
35
40
Number of assumed mode shapes N
a)
Flap
Lag
Torsion
Computational time (sec)
8
6
4
2
0
5
b)
10
15
20
25
30
35
40
Number of assumed mode shapes N
Figure 8. Influence of number of assumed deformation functions on required computational time for a
personal computer with a 2GHz CPU and 3GB of RAM: a) Articulated rotor blade model described in
Ref. 35, (b) Hingeless rotor blade model described in Ref. 36.
This is a sign of excellent convergence characteristics and consistent absolute error, well within
the user-imposed tolerance for the numerical solution of Equation (81).
A similar behaviour is observed in Figs 5(a) and (b) with respect to the case of torsional vibration,
considering both sets of boundary conditions. The magnitude of relative frequency error η is
similar to the case of transverse displacement with respect to both sets of boundary conditions
and all modes presented. Further elaboration on the behaviour of η will be omitted for reasons of
brevity. It is noted however that, the radical reduction in frequency error with increasing mode
number, as observed for the case of transverse displacement of a spring-hinged blade (Fig. 4(b),
has not been exhibited for the torsional vibration case.
There is virtually no difference between the mode shapes obtained by the Lagrangian formulation and the classical methods as regards both sets of boundary conditions and DOFs. Further
comparisons will therefore not be carried out. It can thus be concluded that, the Lagrangian
linearisation assumption is justifiable and does not result in significant errors for the relevant sets
of boundary conditions. The ability of the Lagrangian formulation to numerically re-produce
analytically derived results with excellent levels of accuracy, has been demonstrated.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
888
The Aeronautical Journal
August 2014
4.2Numerical performance
In order to evaluate the numerical performance of the approach presented in this paper, an
articulated and a hingeless small-scale generic helicopter rotor blade model have been analysed.
The small-scale models have been extensively described in Refs (35) and (36) respectively and
thus, further elaboration regarding their configuration shall be omitted. Simulations have been
performed for values of rotorspeed corresponding to Ω = 69 rad/sec (660rpm) and Ω = 105 rad/
sec (1,000rpm), for the articulated and the hingeless rotor blade model respectively.
Figures 6-7 present the influence of the number of assumed deformation functions on the first
five normalised flap-lag-torsion modal frequencies for the articulated and the hingeless rotor
model respectively. The predicted modal frequencies have been normalised with rotorspeed. The
relatively quick convergence of each modal frequency to a definite value can be observed for both
models. It is noted that, the predicted first flap/lag modal frequencies are relatively uninfluenced
by the number of assumed functions and that a definitive value is obtained with the use of only
two Bernoulli-Euler modes. A similar observation can be made with regards to the second flap/
lag frequencies where convergence has been achieved with the use of three and four modes, for
the cases of the articulated and the hingeless rotor blade respectively. A larger number of assumed
functions is required with respect to the first and second torsion modes.
It is noticed that, the lower modal frequencies converge fairly quickly to a constant value while
a larger number of assumed modes is required for convergence to be achieved for frequencies
corresponding to higher modes. This behaviour applies for all DOFs. It is however more pronounced
in the the higher torsion modal frequencies, which are inherently higher in comparison to the
frequencies of the corresponding flap-lag modes. A higher number of assumed modes, associated
with higher frequency content is therefore required, in order to accurately capture the frequencies
of higher torsional deformation modes as shown in Figs 6 and 7(c).
It is also highlighted that, with respect to the flap-lag modes, convergence is achieved with a
relatively smaller number of assumed functions for each mode of the articulated rotor model in
comparison to the hingeless model. This is due to the fact that, the hingeless rotor model incorporates very large steps of flap-lag stiffness at the blade root location. These variations in conjunction
with the corresponding boundary conditions at the blade hub, essentially deem the actual mode
shapes at the root significantly different to the assumed functions. The Lagrangian formulation
must therefore be refined through the inclusion of higher order/more complex modal functions,
in order to accurately approximate the actual mode shapes at the blade root position and therefore
obtain more accurate estimates of the corresponding natural frequencies.
It can thus be concluded that, the proposed method possesses excellent numerical behaviour.
Convergence is obtained for all required mode shapes with the deployment of a relatively small
number of assumed deformation functions. Since the assumed functions are analytically derived
from classical theories, there is no theoretical limit in their maximum obtainable number. It is
emphasised that, the proposed approach has not demonstrated any numerical instabilities or
potential divergence during the course of this work.
4.3Computational performance
Figures 8(a) and (b) present the influence of the number of assumed deformation functions on the
required computational time for the analysis of each DOF for the articulated rotor blade model and the
hingeless model respectively. Results correspond to calculations including up to 40 assumed functions.
Time measurements have been carried out on a personal computer equipped with 3 Gigabytes (GB) of
Random Access Memory (RAM) and a Central Processing Unit (CPU) operating at 2 Gigahertz (GHz).
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
1st Flap Lagr.
3rd Flap Lagr.
1st Lag Lagr.
1st Torsion Langr.
3rd Flap Exp.
2nd Lag Exp.
889
2nd Flap Lagr.
4th Flap Lagr.
2nd Lag Lagr.
2nd Flap Exp.
4th Flap Exp.
1st Torsion Exp.
Mode frequency (rad/sec)
800
700
1T
10P
9P
4F
600
8P
500
7P
400
6P
3F 5P
300
2L 4P
3P
200
2F
2P
1F
1P
1L
100
0
0
10
20
30
40
50
60
a)
2nd Flap FEA
4th Flap FEA
1st Torsion FEA
1st Lag Euler.
800
3rd Flap FEA
2nd Lag FEA
1st Flap Euler
700
Mode frequency (rad/sec)
70
Rotorspeed (rad/sec)
1T
9P
4F
600
10P
8P
500
7P
400
6P
3F 5P
300
2L 4P
200
3P
2F 2P
1F
1P
1L
100
0
b)
0
10
20
30
40
50
60
70
Rotorspeed (rad/sec)
Figure 9. Resonance chart calculated for the articulated rotor blade
model described in Ref. 35, comparison with: (a) Experiment, (b) FEA.
The calculations corresponding to the computational times presented include allocation of
system variables, solution of employed classical methods, evaluation of the definite integrals
expressed by Equations (42)-(47) and (75)-(77), population of mass and effective stiffness matrices
(Mflap/lag/torsion and Gflap/lag/torsion), eigenproblem fomulation and solution, eigenvector normalisation,
and calculation of final mode shapes. A frequency step of 2·5rad/sec has been used for the evaluation of the transcendental Equation (80) coupled with a standard bisection method employing a
pre-defined tolerance region of the order of 10–15.
Figures 6 and 7 have shown that the first 5 flap-lag-torsion modal frequencies have fully
converged to definite values with the inclusion of less than 15 assumed deformation functions
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
The Aeronautical Journal
Normalized displacement
890
1st Flap Lagr.
3rd Flap Lagr.
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
0.2
0.4
2nd Flap Lagr.
4th Flap Lagr.
0.6
Normalized displacement
1st Lag Lagr.
3rd Lag Lagr.
1
2nd Lag Lagr.
4th Lag Lagr.
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
b)
Normalized displacement
0.8
Spanwise coordinate
a)
c)
August 2014
1st Torsion Lagr.
2nd Torsion Lagr.
3rd Torsion Lagr.
4th Torsion Lagr.
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
Figure 10. Normalised mode shapes calculated for the articulated
rotor blade model described in Ref. 35 Ω = 69rad/sec (660rpm)
(a) Flap modes, (b) Lag modes, (c) Torsion modes.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
891
considering both investigated rotor blade models. Further refinement with the inclusion of higher
modal content from classical theories does not affect calculation results. Figure 8 illustrates that,
the required computational time for calculations including 15 assumed modes for a complete
analysis (including all DOFs), is of the order of 0·6 seconds with respect to both rotor blade
models. A complete rotor blade analysis for flap-lag-torsion dynamics, catering for the accurate
determination of natural frequencies corresponding up to the fifth mode of each DOF, can therefore
be carried out on a relatively low-end personal computer within less than 0·6 seconds. If only the
lower modal content is of interest to the analyst (up to the third mode), then according to Figs 6,
7, inclusion of up to only 10 assumed modal functions is sufficient for fully converged results.
The overall computational cost for a complete analysis may then be further reduced to less than
half a second on a low-end personal computer.
Figure 8 shows that computational time increases exponentially with the inclusion of higher
modal content in terms of assumed functions. It is thus realised that, quick convergence is essential
for the purpose of maintaining low computational overhead. Convergence characteristics however
are directly dependent on the selection of assumed modal properties and their compliance with
the requirements outlined in subsection ‘Minimum potential energy methods’ of this paper. The
utilisation of modal properties obtained from classical theories as assumed deformation functions
can now be further appreciated. This is because their deployment is directly responsible for the
significant reduction achieved in required computational time. This reduction has been established
through rapid convergence of the modal frequencies of interest to definite values as elaborated in
subsection ‘Numerical performance’ of this paper, due to the very good quality of the employed
assumed deformation modes.
It is noted that, different rates of increase can be observed in the required computational times
corresponding to each DOF. This observed behaviour is essentially due to the different frequency
ranges encountered within the corresponding computational domains. Different marching times are
therefore required when using an identical/fixed frequency step (2·5rad/sec for all cases presented)
throughout the evaluation of the transcendental Equation (80).
4.4Comparison with experiment and FEA
Following the evaluation of numerical behaviour and computational cost, several comparisons
with experimental measurements as well as FEA results have been performed considering both
investigated rotor blade models. The method’s performance in predicting flap-lag-torsion natural
frequencies and mode shapes is assessed for a wide rotorspeed range.
Figure 9 presents the calculated resonance chart for the small-scale articulated rotor blade model
described in Ref. 35. Experimentally measured as well as FEA derived flap-lag-torsion frequencies
extracted from Ref. 35, have been superimposed upon the resonance charts presented in Figs 9(a)
and (b) respectively. The solid and broken curves represent predictions made with the Lagrangian
method (Lagr.), while the markers signify experimental measurements or FEA results, depending
on indication. It is noted that, the experiments reported in Ref. 35 have not been conducted in
vacuum conditions. It is therefore realised that, aerodynamic interference effects are essentially
present in the measured data that have been used for the comparisons presented.
It can be observed from Fig. 9(a) that, the correlation between the rotating-blade frequencies
obtained from the Lagrangian formulation and the experimentally measured ones, can generally
be considered to be very good over the entire rotorspeed range. It is noted that, the first flap and
lag modes of motion are essentially rigid body modes for which Ref. 35 contains no data. It
can be noticed that, the effect of centrifugal stiffening due to increasing rotorspeed on the rotor
blade’s modal frequencies has been adequately captured by the derived closed form expressions
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
892
The Aeronautical Journal
1st Flap Lagr.
3rd Flap Lagr.
2nd Lag Lagr.
1st Flap Exp.
3rd Flap Exp.
1st Torsion Exp.
August 2014
2nd Flap Lagr.
1st Lag Lagr.
1st Torsion Lagr.
2nd Flap Exp.
1st Lag Exp.
8P
Mode frequency (rad/sec)
800
3F
700
7P
6P
600
5P
500
4P
400
2F
3P
300
1T
200
2P
1L
1F
100
1P
0
0
20
40
60
80
100
Rotorspeed (rad/sec)
a)
1st Flap FEA
3rd Flap FEA
1st Torsion FEA
2nd Flap FEA
1st Lag FEA
8P
Mode frequency (rad/sec)
800
3F
7P
700
6P
600
5P
500
4P
400
2F
3P
300
200
1T
100
1F
2P
1L
1P
0
0
b)
20
40
60
80
100
Rotorspeed (rad/sec)
Figure 11. Resonance chart calculated for the hingeless rotor blade model described
in Ref. 36, comparison with results from Ref. 37: (a) Experiment, (b) FEA.
given by Equations (75), (76) and (77). Agreement is best with regards to the second flap and
lag frequencies. The average relative error between Lagrangian predictions and measured data
over the entire rotorspeed range is roughly 4% and 3%, for the second flap and lag frequencies
respectively. Larger discrepancies are noted with respect to the third flap, fourth flap, and first
torsion modes, with the corresponding relative errors being of the order of 9% for the flap modes
and 7% for the torsion mode.
Figure 9(b) presents a comparison of the current numerical approach, with results obtained using
the MSC/NASTRAN finite element computer code for the specific articulated rotor model. Since
Ref. 35 contains no data with regards to the rigid body modes, the superimposed data for the first
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
1st Flap Lagr.
3rd Flap Lagr.
2nd Flap Exp.
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.6
0.8
2nd Lag Lagr.
1st Lag Exp.
0.8
0.4
0
-0.4
-0.8
-1.2
0.4
0.6
0.8
0
-0.4
-0.8
-1.2
0
0.6
0.8
1
1.2
2nd Lag Lagr.
1st Lag FEA
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
1st Torsion Lagr.
2nd Torsion Lagr.
1st Torsion Lagr.
2nd Torsion Lagr.
3rd Torsion Lagr.
1st Torsion Exp.
3rd Torsion Lagr.
1st Torsion FEA
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.4
1st Lag Lagr.
3rd Lag Lagr.
b)
Normalized displacement
1.2
0.2
Spanwise coordinate
1
Spanwise coordinate
b)
2nd Flap Lagr.
1st Flap FEA
3rd Flap FEA
0.4
a)
3rd Lag Lagr.
893
0.8
1
1st Lag Lagr.
0.2
1st Flap Lagr.
3rd Flap Lagr.
2nd Flap FEA
1.2
Normalized displacement
Normalized displacement
1.2
0
Normalized displacement
0.4
Spanwise coordinate
a)
c)
2nd Flap Lagr.
1st Flap Exp.
3rd Flap Exp.
Normalized displacement
Normalized displacement
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
0.2
0.4
0.6
0.8
Spanwise coordinate
1
c)
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
Figure 12. Normalised mode shapes calculated for Figure 13. Normalised mode shapes calculated for the
the hingeless rotor blade model described in Ref. hingeless rotor blade model described in Ref. 36, Ω =
36, Ω = 0 rad/sec – comparison with experimental 0 rad/sec – comparison with FEA results from Ref. 37:
measurements from from Ref. 37: (a) Flap modes, (b) (a) Flap modes, (b) Lag modes, (c) Torsion modes.
Lag modes, (c) Torsion modes.
flap and lag modes have been calculated based on Euler’s extended dynamical Equations (27). The
agreement between the Lagrangian formulation and nonlinear FEA, is excellent over the entire
rotorspeed range for which calculations have been carried out and for all blade modes. The average
relative error between Lagrangian predictions and nonlinear MSC/NASTRAN simulations is of
the order of 0·5% and 0·1% for the flap and lag resonant frequencies, respectively. A relatively
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
The Aeronautical Journal
1st Flap Lagr.
3rd Flap Lagr.
2nd Flap Exp.
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.6
0.8
2nd Lag Lagr.
3rd Lag Lagr.
1st Lag Exp.
0.8
0.4
0
-0.4
-0.8
-1.2
0.4
0.6
0.8
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
1st Lag Lagr.
3rd Lag Lagr.
1.2
2nd Lag Lagr.
1st Lag FEA
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
b)
1st Torsion Lagr.
2nd Torsion Lagr.
1st Torsion Lagr.
2nd Torsion Lagr.
3rd Torsion Lagr.
1st Torsion Exp.
3rd Torsion Lagr.
1st Torsion FEA
Normalized displacement
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.4
1
Spanwise coordinate
b)
2nd Flap Lagr.
1st Flap FEA
3rd Flap FEA
0.8
a)
1st Lag Lagr.
0.2
August 2014
1st Flap Lagr.
3rd Flap Lagr.
2nd Flap FEA
1.2
1
Normalized displacement
Normalized displacement
1.2
0
Normalized displacement
0.4
Spanwise coordinate
a)
c)
2nd Flap Lagr.
1st Flap Exp.
3rd Flap Exp.
Normalized displacement
Normalized displacement
894
0.2
0.4
0.6
0.8
Spanwise coordinate
1
c)
1.2
0.8
0.4
0
-0.4
-0.8
-1.2
0
0.2
0.4
0.6
0.8
1
Spanwise coordinate
Figure 14. Normalised mode shapes calculated for
Figure 15. Normalised mode shapes calculated for
the hingeless rotor blade model described in Ref. 36, the hingeless rotor blade model described in Ref. 36,
Ω = 105 rad/sec (1,000rpm) – comparison with experi- Ω = 105 rad/sec (1,000rpm) – comparison with FEA
mental measurements from Ref. 37: (a) Flap modes, results from Ref. 37: (a) Flap modes, (b) Lag modes,
(b) Lag modes, (c) Torsion modes.
(c) Torsion modes.
higher relative error can be observed as regards the first torsion natural frequency which reaches
approximately 2·5%. It is emphasised that, the authors of Ref. 35 have attributed the relatively
large discrepancies between experiment and FEA, predominantly regarding the fourth flap and
first torsion modal frequencies, to inaccurate blade stiffness data. This data has also been used in
the Lagrangian formulation presented in this paper, which essentially justifies the relative errors
in the respective frequencies observed in Fig. 9(a).
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
Mode frequency (rad/sec)
450
1st Flap Lagr.
3rd Flap Lagr.
1st Lag Lagr.
1st Torsion Lagr.
1st Lag Y-71
2nd Flap Y-71
3rd Flap Y-71
2nd Torsion Y-71
8P
7P
350
4F
300
200
5P
4P
2L
150
3P
1T
100
2F
3F
2P
1F
50
1P
1L
0
10
20
30
40
50
Rotorspeed (rad/sec)
1st Lag CMRD
2nd Flap CMRD
3rd Flap CMRD
300
Mode frequency (rad/sec)
6P
2T
250
a)
1st Flap CMRD
2nd Lag CMRD
1st Torsion CMRD
10P
9P
250
8P
4F
7P
200
6P
150
5P
1T
4P
2L
100
2F
3F
0
3P
2P
1F 1P
1L
50
0
b)
2nd Flap Lagr.
4th Flap Lagr.
2nd Lag Lagr.
2nd Torsion Lagr.
1st Flap Y-71
2nd Lag Y-71
1st Torsion Y-71
400
0
895
5
10
15
20
25
30
Rotorspeed (rad/sec)
Figure 16. Calculated resonance charts for two full-scale helicopter rotor blade models
– Lines denote Lagrangian predictions: a) MBB Bo105 helicopter main rotor blade
– Comparison with Boeing-Vertol Y-71 calculations from Ref. 40, (b) SA330 helicopter main rotor blade
– Comparison with CAMRAD calculations from Ref. 42.
The corresponding calculated normalised mode shapes for flap-lag-torsion of the small-scale
articulated rotor model are presented in Figs 10(a), (b), and (c) in that order. Unfortunately, Ref.
35 contains no data with respect to the measured or FEA derived mode shapes. Hence, further
comparisons for the particular rotor model have not been carried out within this paper.
Figure 11 presents the calculated resonance chart for the small-scale hingeless rotor blade
model described in Ref. 36. The solid and broken lines correspond to predictions made with the
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
896
The Aeronautical Journal
August 2014
Lagrangian approach (Lagr.). Figures. 11(a) and (b) compare calculated modal frequencies with
experimental measurements and FEA results respectively, extracted from Ref. 37. It is noted that,
contrary to the experimental data presented in Ref. 35, the measurements reported in Ref. 37 have
been conducted in vacuum conditions. They are therefore not contaminated by any aerodynamically
induced damping. A limited number of data points is available in Ref. 37 regarding the measured
natural frequencies and therefore Fig. 11(a) presents comparisons only for these points.
It can be shown that, the correlation between predictions made with the Lagrangian formulation
and the measured data, is excellent for non-rotating conditions (Ω = 0 rad/sec) with respect to all
modes presented. The relative error between Lagrangian predictions and experimental measurements is of the order of 0·3%, 0·4%, and 2·4% for the flap, lag, and torsion resonant frequencies,
in that order. At high-speed rotating conditions however (Ω = 105 rad/sec (1,000rpm), it appears
that there are larger discrepancies between predictions and measurements regarding all compared
frequencies. The corresponding relative errors reach approximately 3%, 9%, and 10% considering
the flap, lag, and torsion DOFs respectively. These discrepancies are also noted in Fig. 11(b) with
respect to the corresponding FEA simulations, with the exception of the first torsion mode for
which very good agreement is observed. The corresponding relative errors, averaged over the entire
rotorspeed range are of the order of 3%, 2·5%, and 0·7% for the flap, lag, and torsion respectively.
A potential source for the particular discrepancies considering the predicted flap-lag modal
frequencies at high-speed rotating conditions, may be due to a combination of the linearisation
assumption requiring small values of w′(r,t) in Equation (64), the normalisation condition of
the Bernoulli-Euler functions described by Equation (29), and the small-scale nature of the
particular rotor configuration. Equation (29), used for the normalisation of the assumed modal
functions, implies a generalised mass equal to 1·0 for each mode. This may be an overestimation,
considering the small-scale nature of the rotor blade under consideration, leading to large amplitudes for the assumed functions. This may result in the potential breakdown of the linearisation
assumption requiring small displacements for the derivation of Equations (60)-(61), that describe
the centrifugal loading on a beam element. Deployment of a more refined normalisation condition
for the assumed functions at small-scale conditions, may alleviate this discrepancy. Figure 11(b)
presents a comparison of the present numerical approach with results obtained from the nonlinear
finite element computer code described in Refs 38 and 39. Good correlation can once again be
noted for all modal frequencies analysed. The correlations appear to be stronger for non-rotating
conditions due to the reasons elaborated above.
Figures 12 and 13 present the normalised calculated mode shapes for the small-scale hingeless
rotor blade model described in Ref. (36) for non-rotating conditions (Ω = 0 rad/sec ). Comparisons
with experimental and FEA results reported in Ref. 37 are included in Figs 12-13 respectively. The
solid and broken lines correspond to Lagrangian predictions (Lagr.), while the markers signify
experimentally measured values or FEA results, depending on indication. It can be observed from
Fig. 12 that, there is very good agreement between predicted and measured mode shapes with
respect to flap, lag, and torsional deformation. A small discrepancy is observed at approximately
60% of blade radius considering the second flap mode. Figure 13 illustrates the very good agreement
between the mode shape predictions of the Lagrangian approach and FEA regarding all DOFs.
Figures 14 and 15 present the normalised calculated mode shapes for high-speed rotating conditions (Ω = 105 rad/sec (1,000rpm) ). Comparisons with experiment and FEA are provided in Figs 14
and 15 respectively. Figure 14 demonstrates that, there is good agreement between experiment and
simulation for all modes presented, with the exception of the first flap mode. A similar behaviour is
observed in Fig. 15 where excellent agreement is exhibited between the Lagrangian approach and
FEA, for all modes presented apart from the first flap mode. The results of Ref. 37 suggest that,
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
897
the specific mode shape of the particular rotor configuration is highly influenced by the effects of
centrifugal stiffening at high-speed rotating conditions, while the rest of the mode shapes remain
relatively unchanged. The current Lagrangian approach suggests that the particular mode shape
is not influenced as much as suggested by the findings of Ref. 37. At this point it is noted that, a
radical alteration in a single mode shape while keeping the remaining ones unchanged, essentially
results in a violation of the orthogonality conditions expressed by Equations (84)-(85).
4.5Comparison with established multi-body analysis methods
This sections aims to compare natural frequency predictions made using the Lagrangian approach
of this paper, with established multi-body analysis methods employed in comprehensive rotorcraft
codes. Analyses have been carried out for two full-scale helicopter rotors in vacuum conditions; the
hingeless rotor of the MBB Bo105 and the articulated rotor of the A rospatiale SA 330. It is noted
that, the analyses presented in this section (both Lagrangian and nonlinear multi-body methods)
assume that the geometric pitch angle at the root of the blade is set to zero.
Figures 16(a) and (b) present the calculated resonance charts for the Bo105 and the SA 330
helicopter rotor blades, respectively. Simulation results from Boeing-Vertol’s computer code
Y-71(40) for the Bo105 hingeless blade with regards to flap/lag bending and torsional vibration
natural frequencies at nominal rotorspeed, are annotated in Fig. 16(a). Results from nonlinear
analysis performed using CAMRAD(41) for the corresponding resonant frequencies of the SA
330 articulated blade at nominal rotorspeed, are also included in Fig. 16(b). The resonant
frequency predictions made with Y-71 and CAMRAD were extracted from Refs 40 and 42, in
that order. It is noted that, the numerical models within both Y-71 and CAMRAD essentially
account for the dominant terms inducing elastic and inertial coupling between the flap-lagtorsion modes of blade motion. The employed methods within Y-71 and CAMRAD have been
extensively described in Refs (40)-(41) respectively, thus further elaboration within this paper
shall be omited. The solid and broken lines correspond to predictions made with the Lagrangian
formulation of this paper (Lagr.), while the markers denote either Y-71 or CAMRAD simulations, depending on figure.
Good agreement between Lagrangian predictions and Y-71 analysis can be observed in Fig. 16,
a) with respect to the blade’s resonant frequencies at nominal rotorspeed (Ω = 44·4rad/sec) for
the hingeless rotor blade of the Bo105 helicopter. The relative difference in resonant frequencies
between Lagrangian predictions and nonlinear analysis with respect to flap (1F-3F) and lag (1L-2L)
modal frequencies, is consistently well below 1%. It is noted that, the presence of a small amount
of blade twist (–8º which is typical for helicopter rotor blades) introduces a small coupling between
the flap and lag bending DOFs. However, it can be noticed from the corresponding resonant
chart that the effect of this coupling on the respective natural frequencies at nominal rotorspeed
is negligible. This is because the Lagrangian predictions essentially coincide the with nonlinear
analysis results that were obtained using the multi-body code of Boeing-Vertol.
Good agreement can also be noted with respect to the natural frequency of the first torsion
(1T) mode. However, it can be observed that the corresponding difference between Lagrangian
predictions and nonlinear analysis considering the frequency of the second torsion mode (2T),
reaches approximately 3%. This is attributed to the absence of elastic and inertial coupling in the
formulation of the Lagrangian eigenproblem. Reference 40 denotes that, for the hingeless blade
of the Bo105, the centre of gravity axis of the aerofoil portion of the blade is aft of the elastic axis
by roughly 9% chord. This may have resulted in non-negligible inter-modal coupling between
flap and torsion that affects predominantly the higher order natural vibration characteristics of
the rotor blade.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
898
The Aeronautical Journal
August 2014
Good correlation can also be noted in Fig. 16, (b) between the Lagrangian approach and
CAMRAD calculations with respect to flap (1F-3F), lag (1L-2L), and torsion (1T) resonant
frequencies at nominal rotorspeed (Ω = 27rad/sec) for the articulated rotor blade of the SA 330
helicopter. Once again, the relative frequency error between Lagrangian predictions and nonlinear
analysis is consistently well below 1%. Unfortunately, Ref. 42 contains no reference to CAMRAD
predictions considering the second torsion (2T) mode. However, for the articulated rotor blade of the
SA 330 helicopter, the centre of gravity axis of the aerofoil portion of the blade is aft of the elastic
axis by less than 1·5% chord. This essentially leads to reduced flap-torsion inter-modal coupling
in comparison to the Bo105 case. Hence, it would be expected that the relative error in the second
torsion mode (2T) would be below 1% in this instance similar to the flap/lag bending modes.
Thus, it has been shown that the Lagrangian approach proposed in this paper compares favorably
with nonlinear multi-body analysis methods employed routinely in comprehensive rotorcraft
codes in order to analyse typical full-scale rotor blade configurations. The error introduced due
to neglecting the effects of inter-modal coupling between the flap and lag DOFs due to typical
values of built-in blade twist, has been found to be less than 1% with respect to both full-scale rotor
configurations. As regards the respective inter-modal coupling effects between flap and torsion,
these have been found to affect predominantly the natural frequency of the second torsion mode
(2T). Specifically, the relative frequency error in this mode may be of the order of 3% for a rotor
blade that incorporates significant centre of gravity offset from the elastic axis (9% of blade chord).
It follows from the discussion above that, inter-modal flap/lag coupling effects on the rotor
blade’s resonant frequencies may become prominent considering configurations with very large
values of built-in pre-twist, such as the ones utilised on typical medium and high-speed propellers,
as well as on tilt-rotor aircraft. Significant flap/torsion coupling effects are also present when the
rotor blade incorporates high values of centre of gravity offset from the elastic axis. Hence, the
dominant terms inducing elastic and inertial coupling on the blade’s equations of motion have to be
accounted for when analysing blade configurations such as the ones mentioned above. However, it
is emphasised that the present approach has the potential to be extended in order to account for the
dominant terms found in the Houbolt and Brooks Equations(18) inducing inter-modal coupling. This
can be achieved through using partitioned matrix techniques in the formulation of the Lagrangian
eigenproblem. The authors of this work plan to address this topic comprehensively in a later paper.
It is once again noted that, the present approach has been derived for the purpose of being utilised
in the context of a dynamic response analysis in the time-domain. Thus, any nonlinear inertial and
aerodynamic blade loads may be treated as a time-history of external forcing, instead of using
linearised generic expressions for the corresponding terms in the formulation of the Lagrangian
eigenproblem. The dynamic response of the blade may then be evaluated based on the natural
vibration characteristics obtained from the Lagrangian approach using the convolution integral
in order to calculate the dynamic response of the blade in a nonlinear time-dependent manner.
Conclusions
A computationally efficient numerical method, targeting the rapid estimation of the uncoupled
natural vibration characteristics of helicopter rotor blades, has been presented. Lagrange’s equation
of motion, along with Bernoulli-Euler beam and classical torsional vibration theory, have been
utilised in order to derive an integrated approach, applicable to rotating blades with nonuniform
structural properties. Closed form expressions for the direct analysis of hingeless, freely-hinged,
and spring-hinged articulated rotor blades have been offered. The numerical behaviour and
computational performance of the proposed approach have been thoroughly assessed. Comparisons
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
899
have been carried out with measured data, nonlinear FEA, and established multi-body analysis
methods for hingeless and articulated rotor blade configurations considering both small and
full-scale conditions.
It has been shown that, the proposed methodology is capable of numerically re-producing analytically derived modal frequencies with great accuracy. Excellent numerical behaviour is exhibited
for all modes with no instabilities and definitive convergence characteristics, using a relatively
small number of assumed deformation functions. The fact that the admissible functions are derived
analytically from classical theories, essentially designates that there is no theoretical limit in their
maximum obtainable number. This fact is also responsible for the rapid convergence characteristics of
the proposed approach, leading to a significant reduction in required computational cost. Very good,
in some cases excellent, agreement with measured data and FEA has been found, with respect to the
predicted resonant frequencies of both the articulated and the hingeless small-scale rotor model. Very
good agreement has been exhibited with regards to the predicted mode shapes of the small-scale
hingeless rotor model, with the exception of the first flap mode at high-speed rotating conditions.
Finally, it has been demonstrated that the proposed approach compares favorably with nonlinear
multi-body dynamics methods employed in comprehensive rotorcraft codes, for the analysis of fullscale rotor blade configurations. The obtained results are highly encouraging, especially considering
the proposed method’s computational efficiency and ease of implementation.
The Lagrangian formulation proposed in this paper, constitutes a readily implementable integrated
framework applicable to the structural analysis of helicopter rotor blades during preliminary design.
Flight dynamics applications may benefit from this methodology since it acts as a fundamental
baseline for the transition from classical rigid blade modeling to a complete framework for rotor
aeroelasticity analysis, without resorting to computationally expensive FEA or multi-body dynamics.
Implementation does not require any external dependencies or computational infrastructure and
can be realised within less than a thousand lines of FORTRAN code. The overall execution time
required for accurate analysis, considering modal content reaching up to the fifth mode for each
DOF, has been shown to be less than 0·6 seconds for a low-end personal computer. The required
computational time may be even further reduced to less than half a second when only modal
content up to the third elastic flap-lag-torsion modes is of interest to the analyst.
References
1.
2. 3. 4. 5. 6. 7. 8. Howlett, J.J. UH-60A Black Hawk Engineering Simulation Program: Volume I-Mathematical Model,
NASA, CR 166309, 1981.
Ballin, M.G. Validation of a Real-Time Engineering Simulation of the UH-60A Helicopter, NASA,
TM-88360, 1987.
Diftler, M.A. UH-60A Helicopter Stability Augmentation Study, Proceedings of the 14th European
Rotorcraft Forum, Milano, Italy, September 1988.
Kim, F.D., Celi, R. and Tischler, M.B. High-order state space simulation models of helicopter flight
mechanics, J American Helicopter Society, October 1993, 38, (4), pp 16-27.
Kim, F.D., Celi, R. and Tischler, M.B. Forward flight trim and frequency response validation of a
helicopter simulation model, J Aircr, November 1993, 30, (6), pp 854-863.
Curtiss, H.C. and Zhao, X. A Linearized Model of Helicopter Dynamics Including Correlation with
Flight Test, 2nd International Conference on Rotorcraft Basic Research, College Park, MD, USA,
February 1988.
Chaimovitz, M., Rosen, A. and Rand, O. A Generic harmonic rotor model for helicopter flight
simulation, Aeronaut J, April 1993, 97, (961), pp 14-24.
Miller, D. and White, F. Treatment of the Impact of Rotor-Fuselage Coupling on Helicopter Handling
Qualities, Proceedings of the 43rd Annual Forum of the American Helicopter Society, St Louis,
Missouri, USA, May 1987.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
900
The Aeronautical Journal
August 2014
9. Talbot, P.D., Tinling, B.E., Decker, W.A. and Chen, R.T.N. A Mathematical Model of a Single Main
Rotor Helicopter for Piloted Simulation, NASA, TM-84281, 1982.
10. Padfield, G., Thorne, R., Murray-Smith, D., Black, C. and Caldwell, A. U.K. Research into system
identification for helicopter flight mechanics, January 1987, Vertica, 11, (4), pp 665-684.
11. Shupe, N. A Study on the Dynamic Motions of Hingeless Rotored Helicopters, US Army Electronics
Command, TR ECOM-3323, 1970.
12. Curtiss, H. and Shupe, N. A Stability and Control Theory for Hingeless Rotors, Proceedings of the
27th Annual Forum of the American Helicopter Society, Washington, DC, USA, May 1971.
13. Lewis, W.D. An Aeroelastic Model Structure Investigation for a Manned Real-time Rotorcraft
Simulation, Proceedings of the 49th Annual Forum of the American Helicopter Society, Saint Louis,
Missouri, USA, May 1993.
14. Sturisky, S.H. and Schrage, D.P. System Identification Validation of an AH-64 Aeroelastic Simulation
Model, Proceedings of the 49th Annual Forum of the American Helicopter Society, Saint Louis,
Missouri, USA, May 1993.
15. Turnour, S.R. and Celi, R. Modeling of flexible rotor blades for helicopter flight dynamics applications,
J American Helicopter Society, January 1996, 41, (1), pp 52-66.
16. Spence, A. M. and Celi, R. Coupled rotor-fuselage dynamics and aeroelasticity in turning flight, J
American Helicopter Society, January 1995, 40, (1), pp 47-58.
17. Peters, D.A., Boyd, D.D. and He, C.J. Finite-state induced-flow model for rotors in hover and forward
flight, J American Helicopter Society, October 1989, 34, (4), pp 5-17.
18. Houbolt, J.C. and Brooks, G.W. Differential Equations of Motion for Combined Flapwise Bending,
Chordwise Bending and Torsion of Twisted Nonuniform Rotor Blades, NACA, TN-3905, 1957.
19. Hodges, D.H. and Dowell, E.H. Nonlinear Equations of Motion for the Elastic Bending and torsion
of Twisted Nonuniform Rotor Blades, NASA, TN D-7818, 1974.
20. Hodges, D.H., Ormiston, R.A. and Peters, D.A. On The Nonlinear Deformation Geometry of EulerBernoulli Beams, NASA, TP 1566, 1980.
21. Hodges, D.H. Nonlinear Equations for Dynamics of Pretwisted Beams Undergoing Small Strains
and Large Rotations, NASA, TP 2470, 1985.
22. Murthy, V.R. Dynamic characteristics of rotor blades, J Sound and Vibration, 1976, 49, (4), pp
483-500.
23. Murthy, V.R. and Nigam, N.C. Dynamic characteristics of stiffened rings by transfer matrix approach,
J Sound and Vibration, 1975, 39, (2), pp 237-245.
24. Hunter, W.F. Integrating-Matrix Method for Determining The Natural Vibration Characteristics of
Propeller Blades, NASA, TN-D-6064, 1970.
25. Surace, G., Anghel, V. and Mares, C. Coupled bending-bending-torsion vibration analysis of rotating
pretwisted blades: an integral formulation and numerical examples, J Sound and Vibration, 1997,
206, (4), pp 473-486.
26. Bielawa, R. Rotary Wing Structural Dynamics and Aeroelasticity, AIAA education series, American
Institute of Aeronautics and Astronautics, Reston, VA, USA, 2nd ed, 2006.
27. Bramwell, A.R.S., Done, G. and Balmford, D. Bramwell’s Helicopter Dynamics, ButterworthHeinemann, Oxford, England, UK, 2001.
28. Bisplinghoff, R.L., Ashley, H. and Halfman, R.L. Aeroelasticity, Dover Publications, Mineola, New
York, NY, USA, 1996.
29. Wilde, E. and Price, H. A Theoretical method for calculating flexure and stresses in helicopter rotor
blades: development of a variational procedure based on the rayleigh-ritz method which leads to a
rapid estimation of the flapwise vibration modes and frequencies, Aircraft Engineering and Aerospace
Technology, 1965, 37, (2), pp 45-54.
30. Fasana, A. and Marchesiello, S. Rayleigh-Ritz analysis of sandwich beams, J Sound and Vibration,
2001, 241, (4), pp 643-652.
31. Hodges, D.H. Vibration and response of nonuniform rotating beams with discontinuities, J the
American Helicopter Society, October 1979, 24, (5), pp 43-50.
32. Duncan, W. Mechanical Admittances and Their Applications to Oscillation Problems, Aeronautical
Research Council, R. & M, 2000, 1947.
33. Duncan, W.J. and Lindsay, D.D. Methods for Calculating the Frequencies of Overtones, Great Britain
Aeronautical Research Committee, R. & M. 1888, 1939.
34. Goulos, I. Simulation Framework Development for the Multidisciplinary Optimization of Rotorcraft,
PhD. thesis, School of Engineering, Cranfield University, Bedfordshire, UK, MK430AL, 2012.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X
Goulos et al Lagrangian formulation for the rapid estimation of helicopter rotor blade...
901
35. Wilkie, W.K., Mirick, P.H. and Langston, C.W. Rotating Shake Test and Modal Analysis of a Model
Helicopter Rotor Blade, NASA, TM-4760, 1997.
36. Sharpe, D.L. An Experimental Investigation of the Flap-Lag-Torsion Aeroelastic Stability of a
Small-Scale Hingeless Helicopter Rotor in Hover, NASA, TP-2546, 1986.
37. Srinivasan, A., Cutts, D., Shu, H., Sharpe, D. and Bauchau, O. Structural dynamics of a helicopter
rotor blade system, J the American Helicopter Society, 1990, 35, (1), pp 75-85.
38. Bauchau, O.A. and Hong, C.-H. Finite element approach to rotor blade modeling, J The American
Helicopter Society, January 1987, 32, (1), pp 60-67.
39. Bauchau, O. and Hong, C. Nonlinear composite beam theory, ASME J Applied Mechanics, March
1988, 55, (1), pp 156-163.
40. Staley, J.A. Validation of Rotorcraft Flight Simulation Program through Correlation with Flight
Data for Soft-in-plane Hingeless Rotor, USAAMRDL-TR-75-50, 1976.
41. Johnson, W. CAMRAD/JA, A Comprehensive Analytical Model of Rotorcraft Aerodynamics and
Dynamics I: Theory Manual, Johnson Aeronautics, Palo Alto, CA, USA, 1988.
42. Bousman, W.G., Young, C., Toulmay, F., Gilbert, N.E., Strawn, R.C., Miller, J.V., Costes, T.H.M.M.
and Beaumier, P. A Comparison of Lifting-Line and CFD Methods with Flight Test Data from a
Research Puma Helicopter, NASA, TM-110421, 1996.
Downloaded from http:/www.cambridge.org/core. IP address: 78.47.19.138, on 01 Oct 2016 at 13:30:09, subject to the Cambridge Core terms of use, available at
http:/www.cambridge.org/core/terms. http://dx.doi.org/10.1017/S000192400000960X