F/R System Manual
advertisement

VLA TECHNICAL REPORT NO. 42
F/R SYSTEM MANUAL
D. W. Weber and P. M. Harden
January 1980
CONTENTS
SECTION
TITLE
A
INTRODUCTION SECTION
4
B
FOCUS/ROTATION SYSTEM DESCRIIPTION SECTION
5
C
FOCUS/ROTATION CONTROL UNIT SECTION
145
D
FOCUS/ROTATION CONTROL BIN SECTION
211
E
FOCUS/ROTATION POWER SUPPLY SECTION
236
3
SECTION A
INTRODUCTION
This manual describes the system operation and the electrical
and
mechanical
components
of
the
Focus/Rotation
System.
The
Sections of this manual describe in detail the operation, alignment and
troubleshooting of the system as a whole and of its component parts,
enabling
the
manual
to
be
used as the primary maintenance and
troubleshooting guide for the system.
The Sections (or submanuals) address the following areas:
B - FOCUS/ROTATION SYSTEM
This Section describes the overall system and the associated
components;
ties
together
the
various
components
which
are
distributed throughout the antenna; and includes a troubleshoot­
ing and alignment procedure for the system.
intended for those who are
This Section is
interested in a general functional
description or system troubleshooting.
C - FOCUS/ROTATION CONTROL U N IT, M7
This
Section
describes
the
functional
operation,
bench
alignment and checkout procedure.
D - FOCUS/ROTATION CONTROL BIN
This Section describes the physique and wiring of the F/R
bin (Bin W).
E - FOCUS/ROTATION POWER SUPPLY, M8
This Section describes the F/R power supply used to power
the system electronics.
4
SECTI ON
B
F O C U S /P O T A T IO N
SYSTEM DESCRIPTION
SECTION B
FOCUS/ROTATION SYSTEM DESCRIPTION
TABLE OF CONTENTS
1.0
MANUAL INTRODUCTION AND DESCRIPTION
12
2.0
SYSTEM FUNCTIONAL DESCRIPTION
14
2.1
2.2
2.3
System Specifications
17
2.1.1 Mechanical specifications
17
2 .1 .1 .1 Focus drive
17
2 .1 .1 .2 Rotation drive
18
2 .1 .2 Electrical specifications
18
System Components and Physical Configuration
19
2.2.1 Subreflector
19
2 .2 .2 F/R Mount
19
2 .2 .3 Slo-Syn translators
20
2 .2 .4 Slo-Syn stepper motors
20
2 .2 .5 Brake subsystem
20
2 .2 .6 Limit switches
20
2 .2 .7 M7, F/R Control
20
2 .2 .8 M8, F/R power supply
21
2 .2 .9 M1, Data Set
21
2.2.10 M2, Data Tap
21
2.2.11 Pedestal and apex junction boxes
21
Control Command and Monitor Data Flow
25
2.4
Control Command Execution and Monitor Data Readout
2.5
Telescope O perator/F/R Overlay Considerations
28
and Monitor Data Interpretation
33
2.6
Manual Operation
41
2.7
Calibration Considerations
42
6
2.8
3.0
4.0
2.8.1 Mechanical errors
44
2 .8 .2 Electrical errors
44
2 .8 .3 Transducer errors
45
2 .8 .4 Set point repeatability
45
2 .8 .5 Error calculations
45
2.8 .5 .1 Mechanical errors
45
2 .8 .5 .2 Electrical errors
46
2 .8 .5 .3 Transducer errors
48
49
3.1
Focus/Rotation Mount Assembly
49
3.2
Slo-Syn Translators and Model Variations
53
3.3
Slo-Syn Drive Motors and Model Variations
81
3.4
Brake System
86
3.5
Readout Potentiometers
92
3.6
Limit Switches
95
3.7
F/R Control Unit (M7)
100
3.8
F/R Power Supply (M8)
104
3.9
Junction Boxes and Signals of Interest
105
3.10 F/R System Power Distribution
110
SYSTEM TROUBLESHOOTING AND FAULT DIAGNOSIS
112
4.1
Fault Diagnosis on the Operator's Console
112
4.2
Fault Diagnosis at the Antenna
114
4.3
Typical F/R Control Mount and Translator
Signal Waveforms
126
Junction Box Signals List
129
EQUIPMENT INSTALLATION AND ALIGNMENT
5.1
5.2
6.0
44
DETAILED COMPONENTS DESCRIPTION
4.4
5.0
System Accuracy Discussion
131
F/R Electrical Components Installation and
Initial Tests
131
Electrical Alignment
136
DRAWING REFERENCES
143
6.1
Applicable Antenna Cable Drawings, Antenna 1-20
143
6.2
Applicable Antenna Cable Drawings,
Antenna 21 and Up
144
7
TABLE OF FIGURES
Figure 1:
VLA Antenna Surfaces and Axes
16
Figure 2:
F/R System Physical Configuration
22
Figure 3:
Pedestal Room F/R Components
23
Figure 4:
F/R System CMD/MON Data Flow (Block Diagram)
26
Figure 5:
Data Set Command and Monitor Data and
Data Request Message Formats
27
Figure 6:
Typical Mechanical Calibration Data Sheet
43
Figure 7:
Subreflector Mount and D rive, Isometric Assembly
51
Figure 8:
F/R Mount, Drive and Control Components
52
Figure 9:
HTR-1500/1008/HS-15Q0 Torque vs
Speed Characteristics
57
Figure 10: TM-600/M172-FD306 Torque vs Speed Characteristics
57
Figure 11: HTR-1008/1500 Translator, Block Diagram
58
Figure 12: TM-600 Translator, Block Diagram
58
Figure 13: HTR-1500/1008 Translator Physical Configuration
59
Figure 14: Translator Interconnecting Diagram; Signal
and Power, HTR-1008/1500
60
Figure 15: Translator Interconnecting Diagram; Signal
and Power, TM-600
61
Figure 16: Slo-Syn Motor Switching Sequence States
83
Figure 17: HTR-1500/1008 Translator/HS-1500 Motor, Simplified
Wiring Diagram
84
Figure 18: TM-600 Translator/M172-FD Motor, Simplified
Wiring Diagram
85
Figure 19: Brake and Controller, Physical Description
89
Figure 20: MCS-805-1 Brake Controller, Schematic Diagram
90
Figure 21: Brake and Brake Controller, Simplified
Wiring Diagram
91
Figure 22: Readout Potentiometers, Simplified Wiring Diagram
93
Figure 23: Focus Limit Switches, Physical Arrangement
96
8
Figure 24: Rotation Limit Switches, Physical Arrangement
97
Figure 25: Focus Limit Clearance Adjustments
98
Figure 26: Limit Switches, Simplified Wiring Diagram
99
Figure 27: Simplified F/R Control Unit, Block Diagram
102
Figure 28: Simplified Schematic, Analog C ircuitry
and Error Detector
103
Figure 29: Apex Junction Box, Physical Description
106
Figure 30: Pedestal Room Junction Box, Physical Description
106
Figure 31: AC/DC Power Distribution
111
Figure 32: F/R System Fault Diagnosis via the Overlays
113
Figure 33: (a ) TM-600 Translator Drive Waveforms in
Pedestal Room Junction Box, Antenna 21
Through 28
127
(b ) HTR-1008/1500 Translator Drive Waveforms,
Antenna 1 Through 20
128
Figure 34: F/R System Test Data
139
9
TABLE OF DRAWINGS
Drawing Number
98D19171, Sh. 2
Title
Location in Manual
Cable Diagram-Electronic,
VLA Antenna
B13740S1, Sh. 1
24
HTR-1008, HTR-1500
Translator Schematic
B13740S1, Sh. 2
HTR-1008 Translator
Schematic Assy. A5
B13740S1, Sh. 3
62
63
HTR-1008 Translator
Schematic Assy. A1, A2, A3, A4
10
64
TABLE OF COMPONENT DATA SHEETS
Title
Location in Manual
Instructions for Slo-Syn Translator
Type TM-600, Superior Electric
7600 Series 10 Turn Helipot, Beckman
Signalite Surge Arrester
65
94
107
11
1.0
MANUAL INTRODUCTION AND DESCRIPTION
This manual for the F/R System provides a comprehensive func­
tional and physical description of the system and its components for
the VLA engineers, technicians and telescope operators who may have
occasion to work with or operate the system.
This manual covers all functional components of the F/R Drive
System and addresses the following topics:
1)
System Specifications
2)
System Functional Operations
3)
System Components
4)
Alignment and Calibration
5)
Troubleshooting
6)
Control and Data Flow Formats
and Monitor Data Composition
7)
Telescope Operator Interaction with the F/R
Overlay and Interpretation of Behavior
8)
Equipment Installation and Initial Checkout
9)
Manual Modes of Operation
The emphasis and style of this manual is descriptive - to a detail
level consistent with that required for maintenance and repair opera­
tions.
Simple
functional
electrical
circuit
schematic
diagrams and
mechanical sketches are included to illustrate physical configurations
and functional details.
The description of the mechanical portions of
the system is restricted to functional aspects.
drive
loads,
e tc .,
are not included
Topics such as size,
since they are available from
drawings and specifications.
Mechanical and electrical design considerations and design details
are not included - they are available from the drawings referenced by
the manual and are probably not a primary interest of the average
reader.
This manual also contains a number of drawings, component data
sheets and references other drawings which are relevant to the F/R
System.
12
Salient
features of some of the system components and their
effect on system operation are also described.
13
2.0
SYSTEM FUNCTIONAL DESCRIPTION
The
components
of
the antenna which determine the antenna
beam are the primary surface, secondary surface ( i . e . , subreflector)
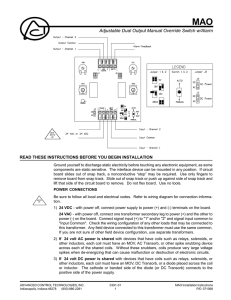
and feed horns.
These are illustrated in Figure 1.
The subreflector, an asymmetric hyperboloid, is located at the
apex of the antenna and reflects the antenna beam from the primary
surface into one of the four receiver feed horns located about the
center of the dish.
The asymmetric shape of the subreflector causes
the reflected antenna beam to be offset from the antenna central axis
by about 38 inches.
When the subreflector is rotated, the locus of the antenna beam
(on the surface of the dish) is a 76-inch diameter circle.
The four
feed horns are located on this circle so that band selection is accom­
plished by rotating the subreflector to the appropriate angular posi­
tion to direct the signal into the desired feed horn.
The total range
of rotation motion is 400 degrees, minus a few degrees due to limit
switch inhibit action.
The subreflector is raised or lowered to focus the signal in the
selected feed horn.
The total range of focus motion is 12 inches,
minus about an inch due to limit switch inhibit action.
"CW" and "CCW" motion of the rotation drive is defined in the
clock sense when looking down into the antenna from the sky.
The
"UP" motion of the focus drive is defined as toward the sky (away
from
the
primary
surface)
and
"DOWN"
is
the converse.
These
definitions are illustrated in Figure 1.
The task of the electronics
portion of the
F/R
System is to
position the subreflector at the appropriate position under computer
control.
Wavelength selection commands are automatically directed to
the
System by the observing system in the control computer.
F/R
The computer has four sets of unique command arguments which are
the appropriate set points for the focus and rotation drive mechanism.
The
observing
system outputs
the argument set required
wavelength selected.
14
for the
The
subreflector
position
may
be manually controlled
by the
telescope operator at the control console through the use of the F/R
System overlay on a console CRT terminal.
The subreflector position may also be controlled locally at the
antenna for test or maintenance purposes.
Computer-generated position commands and F/R System monitor
data are routed to/from the F/R System via the Monitor and Control
System as described in paragraph 2.3 of this manual.
15
F /R DRWE.
MECWANJ\5 M S
SECONDARY s u r p a c e
( sue> - RE.PLE C T O R )
a m t e m m a
APEX
S U e> R £F L E C T O R
STRUCTURE
MOVEMENT
PEFlNlTiOMS
* P R IM A R Y
SURFACE
\
SU B R EF LECTOR
\
/
CCW
ANTENNA
VERTEX
FEEDM ORW
(TVP. )
LOCUS OF
AMTEKINA 0 E A M
\
\
1
ONJ T W £ DlSM
S U 8f? £F L E C T O R
AXIS
PR IM A R Y
SUGPACE
AVIO
G E O M E TR IC V IE W
F IG . 1 - VLA
ELECTRICAL VIEW
SILHOUETTE V i e w
AT SUNSET (TYP.)
A N T E N N A SURFACES A N D A XES
16
/
.
2.1
System Specifications
The
following
specifications
have
determined
the
design
characteristics of the F/R System:
1)
Memo - Peter Napier to Bill Horne,
September 4, 1973
2)
RFP - VLA-29, March 15, 1974,
(contains F/R Mount Mech. Specs.)
3)
Memo - Barry Clark to Dave Weber,
May 28, 1975
Because of the bulk of material in these specifications and
the functional description emphasis of this manual, the specifica­
tions of interest have been abstracted and stated below.
specifications
quirements.
do not address
These
important mechanical design
re­
Interested readers are referred to the specifications
above.
2.1.1
Mechanical specifications
2 .1 .1 .1
Focus drive
Mechanism
drive
range
-
12“ excluding
travel
inhibited by limit switch action.
Readout pot drive accuracy - shall be equivalent
to
no
more
than
±.25 mm of
subreflector
travel and shall include effects due to back­
lash, nonlinearity, manufacturing tolerances,
deflection,
This
eccentricity,
accuracy
is
and anything else.
equivalent
to ±0.083% of
range.
Drive accuracy - shall not exceed the equivalent
of
±.5 mm
of
subreflector
travel.
This
accuracy is equivalent to ±.164% of mecha­
nism range.
Drive ratio - one motor step (1 .8 ° shaft rotation
increment)
.01
mm.
shall
T he
move
fu ll
the
12"
requires 30,480 motor steps.
17
of
subreflector
tra v e l
th u s
Drive
rate
-
up to 300 motor steps/second or
180 mm/minute.
Readout pot drive range - 3600° for 12“ of sub­
reflector travel.
2 .1 .1 .2
Rotation drive
Mechanism drive
range -
shall be 400°+10°-0 of
subreflector rotation excluding travel inhib­
ited by limit switch action.
Readout pot drive accuracy - shall not exceed ±.2
degrees of subreflector
rotation when mea­
sured
at the pot shaft input.
shall
include
all
gearing
e rro r,
This error
backlash
linearity, runout e rro r, manufacturing toler­
ances,
eccentricity,
etc.
±0.2
degrees
is
equivalent to ±.055%.
Drive accuracy - shall not exceed ±15 minutes of
arc or ±0.069%.
Drive ratio - one motor step (1 .8 ° shaft rotation
increment)
shall
rotate
the
subreflector
1
arcminute.
The full range of package rota­
tion thus requires 24,000 motor steps.
Readout pot drive range - 3600° for 400° of sub­
reflector rotation.
2 .1 .2
Electrical specifications
Readout potentiometer linearity - ±0.015%, independent
linearity.
Potentiometer - Beckman 7603 series, 20,000 ohms±1%,
10 tu rn , servo mount, flatted shaft, -11300 turns
of resistance wire wiped in 3600° of input shaft
drive.
Resistance temp coefficient <±20 ppm/c°.
Conversion resolution - 1/4096, 12 bits, binary coding.
Conversion accuracy - ±0.05% (±1 b it).
Error null - <±1 LSB.
Temp coefficient of set point error - <±.002%/C°.
18
2.2
System Components and Physical Configuration
Figure 2 depicts the physical
components
of
the
F/R
System.
configuration of the major
Figure
3 depicts
the con­
figuration of the pedestal room components in detail.
Drawing 98D19171, sheet 2, depicts the antenna cable runs
and
the
physical
block
electronics
components.
integrated
into
the
structure
of
The
components and cables are
overall
F/R
the
antenna cabling
antenna
plant.
electrical/
Reference
designators such as "W108" identify cable runs and permit con­
venient reference to the associated cable schematic and assembly
drawings.
Note that ail F/R System power (110 V ac, 22 amps, 60 Hz,
single-phase) is provided by a single ac connector (Hubbel twist
lock) in the lower right side of Rack-C (viewed from the rear)
and comes from a dedicated ac breaker (30 amps) in the pedestal
room breaker box (not shown in Figure 3 ).
This ac connector
should always be disconnected when working in the back of the
rack as there are lethal voltages exposed on uncovered terminal
strips.
The functional
described below.
components of the F/R System are briefly
More detailed descriptions are found in para­
graph 3 of this manual (detailed components description).
2.2.1
Subreflector
The subreflector is an irregular hyperbola 90.5 inches
in diameter and is connected to the F/R Mount via a metal
drum.
2 .2 .2
F/R Mount
This
motors,
axis.
mount
brakes,
This
houses
the
mechanical
rings,
gears,
position pots, and limit switches for both
unit is manufactured
by the Sterling-Detroit
Company, Detroit, Michigan, leading to the secondary name,
"Sterling Mount".
19
2 .2 .3
Slo-Syn translators
Two translators, one for focus and one for rotation,
translate low-level drive pulses to the high voltage,
current two-phase pulses required
motors on the
F/R
Mount.
high
by the Slo-Syn
drive
These translators are special
order units manufactured by the Superior Electric Company.
2 .2 .4
Slo-Syn stepper motors
These motors provide the torque required to move the
focus and rotation drive mechanisms.
These motors are also
manufactured by Superior Electric Company.
2 .2 .5
Brake subsystem
The brake subsystem consists of two induction brakes
(one for each axis) and associated brake controller.
Manu­
factured by the Warner Electric Brake and Clutch Company,
the brakes apply braking torque to the F/R drive to pre­
vent slippage of the subreflector between motion commands.
This is released to permit mechanical movement during the
execution of motor drive commands.
2 .2 .6
Limit switches
The
limit switches
(UPPER/LOWER and CW/CCW) are
activated by their respective drives near the extreme ends
of mechanism motion and
signal to the control logic that
fu rth er drive into the limits is to be inhibited.
2 .2 .7
M7, F/R Control
This single wide module contains the control logic and
circuitry
for
executing
F/R
System
gathering of monitor data which
analog
levels within
the system.
commands
and
the
indicates the states and
The controller contains
two independent controllers which are capable of indepen­
dent
simultaneous
operation.
Section
C of
describes the operation of this unit in detail.
20
this
manual
2 .2 .8
M8, F/R power supply
This
6 wide module contains the +5 V logic,
+5 V
ISOL, +15 V and -15 V power supplies required by the F/R
System electronics.
In addition,
it contains the switching
relays for the brake controllers,
release
voltage and
LED indication of brake
limit switch conditions.
Front panel
push button switches also allow focus and/or rotation to be
driven locally in conjunction with an M7.
Section E of this
manual describes this module in detail.
2 .2 .9
M1, Data Set
This 1 wide Monitor and Control System module pro­
vides the position commands to the F/R Control unit (see
2 .2 .7 ) and gathers monitor data from the control unit which
is
indicative
of
system
performance.
This
unit
is
not
described in this manual, the reader is referred to the Data
Set Manual
(VLA Technical Report 30) for details on the
operation of this unit.
2.2.10
M2, Data Tap
This 4 wide Monitor and Control System module pro­
vides the facilities to trap and display command and monitor
data
messages.
This
enables
System to be observed locally.
used to trap
messages.
the
operation
of the
F/R
This Data Tap may also be
and display any antenna command and data
The operation of this unit is described in the
Data Tap Manual (VLA Technical Report 38) and the in ter­
ested reader is referred to this manual for details on the
operation and use of this unit.
2.2.11
Pedestal and apex junction boxes
These
junction
boxes
are
the terminus for all
F/R
System antenna cables and are very convenient for signal
observations and system maintenance.
21
F /R F E E D -
APEX CAbLE
• RUMS
MOUMT
'
A5 5 EMBLV
sub
-r e f l e c t o
feedhorm
Ct v p . )
ELEVATION! AXtS
CAfcLE W RAP
A Z IM U T H A X IS
CABLE W R A P
BRAKE
POWER
SUPPLl£Sf2)
F /R C O M T RO U
F /R P O W E R 5 U P P L Y
DATA SE T
DATA T A P
v
T R A M S L A T O R S ^)
f
DRW BY*. PAUL HARD€M
adapted pssm
DvOG’s
F IG .
2
- F/R. SYSTEM PHYSICAL
22
CONFIGURATION
njrao
| CABLE, Assy’s
\CA3L£ ASSVk]
1W
iOt, 102,/03.
|104 AM
OW 3 4
I
IW34, vjtoe, to9tno,1
| m, AM
OW//2 |
CABLE R U N S
to apfx
ROT BRAKE
CONTROLLER
PEDESTAL RM
CABLE TRAYS
FOC B R A K E
C O NTRO LLER
AZIMUTH AX/S
CABLE WRAP
"C R A C K
& /N -\ A/
,
F /R SYSTEM
CONTROL E L E C T R O N /C *
200 dba PR
£X M A U S T
FAN
FOC TRANSLATOR
ROT TRANSLATOR
ICABLE.
ASS'/S 1
.\A/f 0 / , / 02 , / 04 , 1
IAM
D WIQ9___|
\~CABLE ASSY'S
1Wfos, foe,/to,
| ///,ANDW//2 |
P £ D ROOM
DOOR A C C E S S
P E D E S T A L RO O M
J U N C T IO N B O X
-Ml F/R CONTROL
M1 DATA S£T /OS 3)
■M2 DATA TAP
W3J2
o
o
© © © O ©
O o C)
o <y o
o @ a s
■r>
cc
C
< j>
i-,
e<> c c
o o
o oo
oo o
F0C (TW
c
a/s
o
/=//? PcweK suPPty
C C A JM S C TC bt
ti
d e t a il
FIG . 3 - P E D E S TA L
1A///2
Sistea
/ ti-C Power
~/ C
c
B i N "\n "
O O
RACK 'C" - PEAR V I£ W
ROOM
F /R
23
COMPONENT'S
. TS-LL" J
! FOCUSSW, j
PDM * 1
50L AR
I
H IV E
*
•OTOR
I
1 LOWER l
J LIMIT j
“ T J
*”
JB3 •
Yr*
r ’ Fs-uL'i
! “PR"
( FOCUS SM/t I
I UPPER I
' LIM IT I
POLAR
D R IV E
L«A
«j
Wr*
V
11
{
I___ r _____I
1____ _ ,_____ I
V
! "PDB*
1
| PO LA R I
REAOOUT I
« (PO T.) !
.
v
Si
H
________r *
st
cable
J66
______ r . A .
J8T } = - - - - J
JB« E------ __ _J
ZO T ®OK*
P R IM E FO CUS
M A N U A L CONTROL
S T A T IO M
*•*
- a
"a i a t
PRIME FEED MOUNT ASSY.
A55Y MO: 98019126-01
w ir e l i s t : 9 6 0 1 9 1 6 0
LQ4* .BAffA.?£T S.9MJP9l.#-Ay?L.kJMfct.
VERTEX ROOM ASSY.
10 5 0*' P S # 3 COMMANDS 4 MCNIT q K DATA
assy n o
jet
r a c k
X
XjL
\
FRONT-END
! '3
ASSY No: 98P19*65-01
1 '4
P«6P.P?*EL
w ir e
TL
r
CRY06CNICS
safety
Switch*
FUSED
ASSY NO:
9<0l»14l-QI
Lis t :
A&SaiMSL
141
j b
VERTEX ROOM
JUNCTION BOX
BLOCK D IA 6R AM J
' ,(L
w ir in g
CRYOGENICS
POWER
D ia g r a m t
98gi> a tja
I.J»
I )9
cRvottwci
CONTROL
PANEL
*AlA4"
CRYOGENICS
PROPOSED
REMOTE
CA»UE
£}9Il__ I
B
oc^ 8«akCAC
compressor
Vf X.
CONTROL
■•fjTENNA
■n t r o l
J N IT
:
cam
_________
" wipe;cbyooi^c compbeispr control.
imti:
JJCJ
FOCUS
BRAKE
CONTROLLER
*« p » 9 te e *< M
SCHEMATIC DIAGRAM!
e d e s ta l r o o m a s s y ,
i L Jt
1
<EEE
a s s y mo:
aS9t
R o t a t io n
Dr a k e
con tro ller
CONTROL
P/R BRAKE CeWTWQt.HR.
ocus
'J L fDRIVE
TRANSL.
ROTATION
DRIVE
TRAMSL.
-R A C K “C; '
SERVO
C o n tro l
O.c. OUTPUTS
UN
LIM
ESIN
S^O
THS
ER
W
O
irN
A
*fISE
INSHW
INCHEiD
S
a ssy mo:
96Dl9ie7-P>
< A N T E N N A S *! i ON
w ir e l is t ;
A1372OWS0
CAflLC Diagram :
.. jg s s m
^
V7
material
SEE 8/M
*
98019171-01
[ NtXT»$S*
<WOEUUOJ^ti
L'SIP 0*
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
sx-or-l.
CA8LE DIAGRAMOTBTELECTRONIC,
BWWWgfl "'
VLA ANTENNA
IfaBL
2.3
Control Command and Monitor Data Flow
Figure
4 depicts the flow of F/R
monitor data
(the
System commands and
balance of the Monitor and Control System
equipment has been omitted for simplicity).
F/R System commands (either position set point or reset)
are issued from MONTY, the computer, by the observing system
at wavelength change time (or manually by the telescope oper­
ator) and are routed to Data Set 3 in the Monitor and Control
System.
The commands and monitor data are digital time sequence
messages with encoded address components which designate, DCS
address, Data Set and Multiplex Channel Address.
The message
information is encoded in 24 bits which follow the address com­
ponents.
The
F/R
position
commands are formatted
least significant twelve of these 24 bits.
into the
Figure 5 depicts the
message format.
Data Set 3 is the control/data interface to the F/R System
and
detects
components
position
F/R
and
System
command messages,
decodes address
causes the command information
set point or drive
reset)
(i.e .,
either
to be loaded into the F/R
Control unit by activation of address, clock, strobe, and infor­
mation
lines to the control
unit.
The Data Set gathers both
digital and analog monitor data from the F/R controller by acti­
vation
of
address,
strobe
and
clock
lines.
These data are
converted to digital values (if analog) and combined with address
components to formulate monitor data messages which describe
the states and analog levels within the F/R System.
Programs in
the control computer decode the messages and provide the infor­
mation to other programs which analyze F/R System performance
and
interact with the telescope operator via
the
F/R
System
overlay.
The Monitor and Control System and command and monitor
data
operations
are
Technical Report 30).
described
in
the
Data Set Manual
(VLA
The reader is referred to this manual for
a more extensive discussion of the system characteristics.
25
£
APEX
VERTEX ROOM
®®®©^ 0
0
0
?£j
tp
£5t" >J* ivSjf U
"to'Q
0 © 0>^
®Tl G» (S>T2 C9
<z»
L.O. S Y S T E M
PEDESTAL
/\
bAA
ANTENNA
BUFFER
ROOM
P
k VD
u
V vn
>41
i
§1
ALL ANTGA/MA
(LMDS AJJDMON
* O'
^
V)
M£SSA<S£S
K$ K p
5 5
S
4m 5i £
o.
i
iir
V7V.
Q © O G )G )
n o c
T 3
V> *
5 0
PR WE
COMMANDS
O*
MB
M&
/
~ F /R S Y S T E M
Om d /M O N
commands
0
/
~
------------»
M7
F/R POWER SUPPLY
F IG . 4
TRANSLATOR
LOCAL
9 f
pfR CONTROL
DATA F L O W
(BLOCK
ROT
TRANSLATORS
D IA G R A M )
I* — 50 11S — ►
5pS/BIT
4 5 0 pS, 45 BITS
lOpS/BIT
010 I I o i oo| I/O
I/O I/O - I/O i/ o| i/ o
I/O i/ o|i/ o
V v-------------- ^ -------------- - V v
MESSAGE
PREFIX, "S"
CHARACTER
ANT ADDR,
5 BITS
DATA
SET
ADDR
3 BITS
MULTIPLEX ADDRESS, 8
BITS
u
PARITY
BIT P9
J
1/0 i/p| IA>
i/o|i/Q 1/ 0 _
l/oll/ol
v................. ............ .......V---------------------^ --------
DATA BYTE # 1 , 8 BITS j
DATA BYTE # 2 , 8 BITS
PARITY
BIT P27
PARITY
BIT P,18
J
V
DATA BYTE # 3 , 8 BITS
36
45
J
MESSAGE ADDRESS COMPONENTS, IDENTIFY
MESSAGE SOURCE OR DESTINATION
MESSAGE INFORMATION
MSB
ANALOG MONITOR DATA FORMAT
12 BITS
V________________
LSB
________________ J
MULTIPLEX ADDRESS + 1 DATA
MSB
BINARY MONITOR DATA FORMAT
H
DATA REQUEST MESSAGE FORMAT, ” q ” CHARACTER
12 BITS
LSB
________________ J
MULTIPLEX ADDRESS DATA
24 BITS
V ____________________________________
MSB
BINARY COMMAND FORMAT
MSB
\ ________________
LSB
_____________________________________ /
24 BITS
LSB
V____________________________________ _ ______________________________________ J
5 0 mS 1 W
||Q I 0 0 I 0 I 0 0 |
FIGURE 5 : DATA SET COMMAND AND MONITOR DATA AND DATA REQUEST MESSAGE FORMATS
2.4
Control Command Execution and Monitor Data Readout
The flow of F/R System control commands and monitor data
has been described in paragraph 2 .3 .
In this process Data Set
3 stores position commands in the F/R Control unit M7.
command
storage
operation
initiates
a command execution
The
se­
quence in either of the two controllers (they are independent
and
capable
of
simultaneous
asynchronous
operation).
The
commands are stored in 12 bit static storage registers as 12 bit
2's
complement values which
represent 4096 possible command
states in the mechanism drive.
The command execution sequence logic firs t energizes the
associated mechanism brake by applying 110 V ac to the brake
controller via a solid state relay in M8.
The dc output of the
brake controller disengages the brake surfaces by electromag­
netic action.
To avoid immediate drive to the mechanism before
the brakes are disengaged the sequencing logic waits 300 milli­
seconds before enabling motor drive.
During this delay, the
analog portions of the controller are allowed to settle (which
takes about 5 milliseconds because of the integration properties
of the error comparators) and the acceleration/deceleration logic
is initialized.
The
error detecting and steering
logic in the controller
performs a continuous comparison between the actual and com­
manded position to produce direction steering terms which enable
either UP/CW or DOWN/CCW drive clocks to the stepper motor
drive
translators.
The
translators
translate
these low-power
logic domain level clock pulses to high-power sequential switch­
ing pulses which cause the motors to drive the mechanisms so as
to null the error.
As the error voltage approaches null it is
tested by analog comparators which switch when the error signal
falls within a reset aperture.
When either comparator switches
the command state is reset and the translator drive clocks are
inhibited.
The comparators reset aperture is « \ bit wide.
28
When the command state is reset by the comparator switch­
ing described above the brake controller ac power is switched
off which causes the brake to reengage (which takes ~200 milli­
seconds) which then applies braking torque to hold the mecha­
nism in the commanded position.
In the halt state ( i . e . ,
in
between motion commands) the stepper motor translator maintains
a constant dc current through two of the four motor windings
which generate a magnetic “motor holding torque".
This motor
torque serves as a fu rth er motion brake (which in the case of
the rotation drive is much greater than the fail safe brake) to
hold the mechanism in position.
The error detector and comparators have integrating pro­
perties which integrate
noise perturbations less than ~5 milli­
seconds
Typical
in
duration.
noise
sources
are
transducer
noise, noise induced in the long cable runs and ac line noise
spikes which pass through the M8 power supplies (despite the
attenuation of the power supplies and an
RFI
filte r ).
Noise
components in excess of this period and greater than 1 bit in
amplitude can cause premature shutdown of the command execu­
tion logic, resulting in faulty command execution.
The position
helical
readout transducer is a wire-wound 10-turn
potentiometer
which
is excited
by the
F/R
controller.
The characteristics of this potentiometer are described in para­
graph 3.5 of this manual.
The
torque
developed
by
the
translators/drive
decreases rapidly as stepping rate is increased.
motors
This phenomena
necessitates starting the mechanism motion at low stepping rates.
If high stepping rate drive is attempted without an initial low
speed
start,
the
motor
will
just growl and slip magnetically
without producing any shaft motion.
The upper bound of suc­
cessful high speed stepping rate starts is in the neighborhood of
300 Hz.
Because of this phenomena, the F/R Control unit time
modulates the stepping rate by starting mechanism drive ~50 Hz,
which is then linearly increased to about 500 Hz in about one
29
second.
This acceleration of stepping rate enables a roughly
constant fraction of motor torque to be used to accelerate the
mechanism mass to the high drive rate which accomplishes most
of the mechanism motion.
As the mechanism approaches error null another phenomena
becomes important - overshoot past null at high motor stepping
rates.
This is the result of two factors - motor overshoot and
motor coupling "wind up".
stepper motor running
When a dead stop is attempted with a
at high
speed,
overshoot the position at which
the motor will tend to
it should have stopped as a
function of stepping rate and load inertia.
be quite
large for
high
inertial
loads.
This overshoot can
The second cause of
overshoot is the elastomer coupling between the drive motor and
the mechanism drive train .
When the mechanism is accelerating
or under heavy frictional or translational workloads the mech­
anism drive can lag behind the motor shaft by quite a few steps
because of the elastomer "wind up".
When the motor is stopped
with the elastomer "wound up" the stored spring energy must be
released.
This
oscillations
release
which
are
is
usually
damped
motor winding/drive circuit.
in the form of mechanical
by the mechanism friction
and
Experimental attempts to execute a
"dead" stop at a high stepping rate ( e . g ., ~500 Hz) have pro­
duced overshoot errors on the order of 1%.
overshoot
phenomena,
rate
~500
from
Hz
the
controller
Because of this
decelerates
the stepping
to ~50 Hz when the mechanism begins to
approach error null.
The deceleration period is ~1 second and
the deceleration sequence is initiated by the controller when the
absolute
value
of
the
error
voltage
decreases
below
preset
bounds.
Although the elastomer coupling is not an ideal (loss­
less) spring, there are stepping rates at which mechanism reso­
nance can be induced by the impulse nature of the stepper motor
torque.
The upper range of realizable stepping rate is somewhere
around 700 to 800 Hz.
d r iv e n
a t r a t e s w h ic h
In some antennas, the mechanisms can be
appro ach
30
1000 H z b u t in o t h e r s ,
th e
upper
realizable drive rate has been found to be about 700 Hz or less.
For this reason the controllers are set up to produce an acceler­
ated stepping rate of ~500 Hz.
When the upper safe drive limit
is exceeded the motors just stop running with the result that the
motion command remains "stuck" in the controller without ever
completing the motion.
For this reason and for other possible
malfunctions the controller has time-out logic which resets the
command and sets a "time-out" fault flip-flop which is read out
as part of the binary monitor data.
The timer period is about
150 seconds, more than enough for the mechanisms to traverse
the full range of motion at a 500-Hz stepping rate.
The next
motion command or a reset command will reset the time-out flip flop and restart the time-out logic.
A stepping rate of 500 Hz will produce a mechanism motion
rate of about 8.3 deg/sec in rotation and 0.2 in/sec in focus.
The
controller
senses
mechanism
limit
switch
and brake
conditions which are used as enable/inhibits in the translator
drive outputs.
If either the UP/CW or DOWN/CCW limit switch
is activated the drive into the limit is inhibited but drive out of
the
limit is permitted
but drive
reverse must be initiated by
another command from the computer.
The controller does not
automatically back the mechanism out of the limit.
The presence
of brake voltage on the brake terminals in the apex junction box
is
sensed
by the controller and enables drive clocks to the
translator.
The normal output of the brake controller is about
70 V
and
the threshold for voltage detection
Note
that
this
is about 30 V.
indication does not necessarily mean that the
brake has disengaged.
There have been occasions when brakes
have not activated even though correctly powered.
These in­
hibit/enable and other states are read out by the binary monitor
data logic in the controller when commanded by the Data Set.
The composition and usage of this data are described in para­
graph 2.5.
31
The F/R position commands loaded into the controller may
be read out as binary monitor data for confirmation of the com­
mand loading process.
The readout process will be left shifted
eight bits and will occur only once as the readout is a destruc­
tive process.
The
controller
contains
a 16 channel
analog
multiplexer
which reads out important analog parameters and the focus and
rotation mechanism positions.
The composition and usage of this
data is described in paragraph 2.5 .
32
2.5
Telescope O perator/F/R Overlay Considerations
and Monitor Data Interpretation
The telescope operator may manually control the F/R System
on the console CRT's.
This display presents F/R analog data,
system states and enables the operator to conveniently interact
with the F/R System.
The
overlay
display
format,
description
of the
display
elements, operator commands and comments on the interpretation
of the overlay data are described below:
FOCUS/ROTATION FOR ANTENNA 12
POSITION
D/A COMMAND
ERROR
XLAT0R PWR
CMD READBACK
REQUESTED
+5V.
4.970
402
0.975
0.030
2.530
0
400
IS0L.
5.010
WORD C-NORM
R=SET ROT
WORD D-MAN
-201
-0.495
0.005
2.580
0
-203
-10V.
+15V.
-15V.
-10.005
7.500
-7.510
Q=QUIT
T=TAKE
G=GIVE
GROUND SACRED+10
0.000
10.005
U=USE
F=SET FOC
S=ST0P
This overlay is called by typing:
routines are running,
FR n.
If the astronomy
n in the overlay call may be either the
DECIMAL value ANTENNA ID#, or the OCTAL value for the DCS
ADDRESS.
If the DCS ADDRESS is used, the octal value must
be preceded by a single quote.
MODE indicates the control mode for the FOCUS/ROTATION
MODULE, it may be in one of the following modes:
COMPUTER for control from control building.
LOCAL for control from antenna pedestal room.
TRAILER for control from checkout trailer.
APEX for control from antenna apex.
33
POSITION is the mechanism position readback in terms of
the REQUESTED units which range over 2047, 0 and -2048 (ig ­
noring limit switch action).
These digital values are 211-1 , 0
and 211 in 2's complement notation.
REQUESTED
Control
is
the
command
argument
unit by the observing system.
sent to
the
F/R
These values are the
decimal equivalent of the command argument.
Note that when
the operator assumes control in the manual mode the value dis­
played is the last one output by the observing system irrespec­
tive of the manually entered POSITION commands.
D /A COMMAND is the analog equivalent of the digital com­
mand sent to the
+4.997,
0 and
F/R
-5.000
controller and has an analog range of
volts which corresponds to the digital
command range of 211-1 , 0 and -2 11 in 2's complement notation.
One DAC bit has the weight of 2.4 41 4+ ... millivolts.
ERROR is the controller servo loop error voltage and is 50
times the difference between the DAC command output and posi­
tion readout potentiometer.
Thus a + or -1 bit error would be
displayed as + or -125 millivolts (+ or -.1 2 5 ) which is 1/8 of the
command units.
F/R Systems with good performance will ty p i­
cally null with less than ±1 bit erro r.
Large values of error
voltage are an indication of a malfunction somewhere.
command
execution
terminates
without
an
error
If the
voltage
null
< 11251 millivolts then either the controller has malfunctioned,
(probably due to noise glitching the analog circu itry) or there is
excessive frictional drag in the drive mechanism.
If the error voltage builds up again after null or fluctuates
erratically in excess of the 125 millivolt value then the pot is
probably getting noisy and must be replaced (they have a short
life in the antennas).
when the antenna
In extreme cases this may happen even
is stowed and there are no antenna drive-
associated vibrations to induce pot noise.
moving the error
voltage
readout will
When the antenna is
usually be higher than
when the antenna is quiescent due to drive vibrations which can
34
stimulate
small
unbalance,
motions in
F/R
drive mechanisms due to load
lost motion and gear train
motions will drive the
noisy output.
backlash.
These small
readout pots and induce an electrically
The focus error voltage is usually much quieter
than the rotation error voltage because there is probably less
lost motion in the focus mechanism because of the heavy vertical
load components borne by the focus mechanism.
The rotation
drive has more evident lost motion (the specs permit up to ±27
minutes worst case) and consequently the error voltage is nois­
ier.
From the above it can be seen that the error voltages are a
sensitive indicator of the F/R System performance but one should
be
cautious
in making judgments about apparent malfunctions
because of fluctuations in these parameters.
XLATOR
PWR is a scaled measurement of the associated
drive translator +14.5 volt power supply voltage.
should be +2.5 volts±200 millivolts.
older model translators
(antennas
The readout
This value applies to the
1 through
20), the readout
values for the newer model translators in antennas 21 through 28
will be ~+2.1 volts±200 millivolts.
If the value is ~0 it means
that the translator is busted or that the translator power fuse
on M8 is blown which
sometimes happens when the ac power
surges as in summer thunderstorms or there is excessive mecha­
nism binding which can overload the translator.
CMD READBACK is the value of the position command sent
to the F/R Control unit in the last system cycle.
The readout is
destructive in that it may be seen only once after each command
output.
The value displayed has been left shifted 8 bits by the
readout logic.
command
was
This feature
actually
provides a confirmation that the
stored
in
the
controller
and
the
left
shifted value should correspond exactly with the command argu­
ment.
the
F/R
If there is some doubt that commands are not reaching
Control
unit this display feature should be checked.
35
FLASHING
ACTION
REPORTS
definitions
are
as follows:
FOCUS DRIVE ACTIVE implies that the focus controller has
had a position command stored and that the command execution
sequence has been initiated.
FOCUS
AT
UPPER
DRIVE
focus limit has been reached.
LIMIT
implies that the upper
Back off the focus by sending a
command of 0 which is the mid-range for focus travel.
FOCUS AT LOWER DRIVE LIM IT implies that the lower focus
limit has been reached.
Move the focus up by sending a com­
mand of 0 which is the mid-range for focus travel.
FOCUS BRAKE RELEASED implies that the focus controller
is sensing a release voltage on the focus brake and the mecha­
nism is (hopefully) free to be driven.
FOCUS
BRAKE
RELEASE
COMMAND
ON implies that the
focus brake controller has been activated.
FOCUS SLEW ACTIVE implies that the focus is being manu­
ally slewed at the antenna in one of the local modes.
ROTATION
DRIVE ACTIVE
implies that the rotation con­
troller has had a position command stored and that the command
execution sequence has been initiated.
ROTATION AT CW LIMIT implies that the clockwise limit has
been reached.
Set a rotation command at 0 which is the mid­
range for rotation to clear the limit.
ROTATION AT CCW LIMIT implies that the counter-clockwise limit has been activated.
Set a rotation command of 0 which
is the mid-range for rotation to clear the limit.
ROTATION
BRAKE
RELEASED
implies
that
the
rotation
controller is sensing a release voltage on the brake and the
mechanism is (hopefully) free to be driven.
ROTATION BRAKE RELEASE COMMAND ON implies that the
rotation brake controller has been activated.
ROTATION SLEW ACTIVE implies that the rotation is being
manually slewed at the antenna in one of the local modes.
36
ACCEPTABLE COMMANDS FOR THE FR n OVERLAY
Q=QUIT
T=TAKE
G=GIVE and U=USE are the same functions as
the ones in the pointing relays.
F=SET FOCUS positions the cursor to accept a focus command.
R=SET ROT positions the cursor to accept a rotation command.
S=STOP
the
current
drive action
in process.
This command
immediately resets the command state in both the focus and
rotation controllers.
The STOP command may be manually issued at any time and
resets the command state in the controller and clears the com­
mand argument previously stored to 0000.
The command argu­
ment for this command is irrelevant as it is not used.
This
command may be used to override one which sends the drive into
the limits.
TIME-OUT fault indicators (not part of the overlay) is set
by the controller if the command execution has not been com­
pleted
within about 150 seconds.
When this fault occurs the
controller logic is reset to the quiescent state and drive clocks
to
the
associated
translator
are
inhibited.
When
TIME-OUT
occurs the drive activate indications are cleared from the dis­
play.
This feature is a malfunction indication and also serves to
protect
the electrical
and mechanical
hardware from incessant
motor drive impulses.
The voltages displayed are vital system voltages which must
be present and correct for proper operation of the F/R System.
SACRED+10 is the precision reference voltage for the con­
troller and
is the DAC reference voltage as well as an offset
current source.
This is a very important parameter and should
be within ±1 millivolt for proper scaling of DAC outputs.
-10 V (-10 volts) is the voltage which excites the position
readout pots and is derived from the SACRED+10 volts.
This
value is also critical and should be within ±1 millivolt for proper
37
operation.
This value will track (with the opposite sign) the
SACRED+10.
The +5 V value is the controller logic power and
should be no more than ±150 millivolts from 5,000.
The ISOL
5 V value is an isolated logic supply which is used in sensing
discrete inputs from limit switches and brake controllers.
This
value should be no more than ±150 millivolts from 5,000.
The
+ and
-15 V values are the analog power supplies
which drive the controller analog circu itry.
These readouts are
from ”2 voltage dividers, thus ±7.500±150 millivolts is indicative
of proper ±15 power supply voltage.
GROUND is literally a grounded input to the F/R Control
unit analog multiplexer and is primarily useful as an indication of
Data Set 3 A /D converter zero d rift.
The 20 volt span of the
SACRED+10 and -10 volts may be used as an indication of Data
Set 3 A /D gain d rift.
Control
unit
which
If there is a component failure in the F/R
will
impact the
SACRED+10 and
-10 volt
supplies the failure will probably cause a dramatic shift in these
values.
Small drifts
in these values should not be cause for
alarm as they are probably due to either A /D gain or zero d rift
which is not a serious problem.
The Data Set A /D converter
least significant bit is 5 millivolts which is more granular than is
desirable for precision measurements of the DAC outputs and the
two critical voltages.
A /D 's typically are accurate to within ±1
LSB (±5 millivolts in the Data Set) when properly calibrated but
may be subject to slow d rift effects.
Because of these drifts the
Data Set A /D 's should be periodically recalibrated.
The F/R Control command multiplex addresses are:
1)
Focus position command - 320^
Focus command reset - 330o
o
2)
Rotation position command - 321g
Rotation command reset - 3310
o
The binary monitor data readout multiplex addresses are:
1)
Focus command readback - 202g
2)
Rotation command readback - 203o
3)
F/R drive status - 204g
o
38
The analog monitor data
readout multiplex addresses and
data are:
Addrg
Parameter
0
+5 volt logic power
1
+5 volt isolated supply
2
-10 volt pot excitation
3
+15 volt power supply (reading = +15/2)
4
-15 volt power supply (reading = -1 5 /2 )
5
Analog ground
6
Focus position
7
Rotation position readout, -10, 0, +10 V
10
Focus
readout,
command
DAC
-10, 0, +10 V
output,
+4.997,
0, -5 V
11
Rotation command DAC output,
+4.997, 0, -5 V
12
Focus command error det output
-1 .2 5 , 0, +1.25
13
Rotation
command
error
det
output
-1 .2 5 , 0, +1.25
14
Focus trans power mon ~+2.5 V
or ~+2.1 V
15
Rotation trans power mon ~+2.5 V
or +2.1 V
16
SACRED+10 reference
17
Not used
20
Anemometer 1 output
21
Anemometer 1 output
40
Anemometer 2 output
41
Anemometer 2 output
All of the above digital and analog monitor data on the MW1
overlay.
An important operational
admonition
is:
DON'T EVER at­
tempt a full-range motion command or try to drive the mechanism
into the
limits.
A large command argument change (from the
39
previous value) will cause the controller to accelerate the drive
rate to a high value which could then cause the motor to drive
the mechanism into the physical stops at high speed.
This could
damage the limit switches ( it has happened) or even damage the
expensive
inside
drive
command
The
some
command values at either end are not physically realizable.
The
controller
argument
limit switches are activated
means that
F/R
the
mechanism.
range
which
does not reject command arguments which are
beyond the limits.
A second reason for this admonition is that
the limit switches may stay stuck on even after the mechanism
switch activator has been backed away from the switch.
The
rotation limit switches are particularly liable to this problem as
they are activated by a spring-loaded lever arm.
Sometimes the
lever sticks and it is necessary to free it by driving to the
other limit (meanwhile hoping that it will not stick in the other
position).
If it sticks you have to climb up to the apex and
reach down and manually unstick it.
short arms.
Drive focus up if you have
Another problem is that 400° of rotation motion
requires that a sliding dog be used to drive the lever arm limit
switch actuator mentioned above.
This dog slides in a circular
groove and normally sits at the most extreme position to which it
was previously driven.
If the groove/dog friction builds up due
to snow or dust clogging the groove the dog may stick if you
attempt to drive into the limit.
In the event that the limits stick
and you elect to manually unstick them, this manual could be
handy as paragraph 3.6 has illustrations which depict the limit
switch locations on the F/R Mount.
If it is really necessary to test the limit switch operation
from
the
F/R
overlay
then
approach them cautiously with
succession of small command arguments.
40
a
2.6
Manual Operation
It is occasionally necessary to drive the subreflector in a
local manual mode for test or alignment purposes.
The local
mode is selected by setting the mode selector switch on the front
panel of the F/R controller to the "prime focus",
"local" positions.
"trailer" or
In the local position the push buttons on the
F/R power supply may be used to manually slew either mecha­
nism at ~100 Hz stepping rate which will rotate the subreflector
at about 1.6 degrees/second and raise or lower the subreflector
at about .040 in/sec.
LED indicators indicate the detection of
brake voltage and actuation of limit switches.
Paragraph 3.9 of
this manual describes the use of these controls more fu lly.
In the trailer mode the subreflector drives can be manually
slewed as described above by the use of a remote F/R power
supply as a control panel.
The LED indicators are illuminated in
the same manner as described above.
This mode of operation is
not presently used but has been used with early antennas for
independent single-dish observations.
The prime focus mode is used to control the subreflector
from the apex by the use of the "Prime Focus Zot Box".
This
mode is used for test purposes at the apex and has LED's to
indicate limit switch activation.
41
2.7
Calibration Considerations
F/R System calibration is a two-fold operation - mechanical
calibration
of the drive mechanism and alignment of the
F/R
Control unit.
Mechanical calibration involves manually rotating the subre­
flector axis to the angular positions which are associated with
the four feed horns.
The resistance between the wiper and the
CCW end of the pot is recorded for each of the four positions.
The total pot resistance is measured and then the ratio of the
four
resistances to the total resistance is then translated into
four command arguments which are then stored in a calibration
table in the computer for access by the observing system.
This
scheme of alignment is quite simple and eliminates the need for
precise adjustment of the position readout pot.
Figure 6 is a
typical resistance calibration data sheet.
The controller alignment consists of bench tests to verify
DAC linearity and data readout gain and zero.
In the antenna a
final gain and zero alignment must be done with the loop closed.
These adjustments are on the order of ~0.1% or less and are
necessary
to adjust the closed loop gain and zero errors to
~±0.025%.
42
FOCUSING FEED MOUNT ANTENNA NO.
1.
FOCUS RATE WITH ZOT BOX
2.
ROTATION RATE WITH ZOT BOX
3.
C W ROTATION CAUSES RESISTANCE DECREASE _
4.
UP MOVEMENT CAUSES RESISTANCE DECREASE
5.
BRAKE GAP SETTING:
_fi/MIN.(>2000fi/min.)
ZOT BOX
__ fi/MIN. (>2500f2/min.)_J*~ SLOW SPEED
*\%
FOCUS
IN.
lA
IN.
7 3 . 3 ^
_VDC
ROTATION
BRAKE VOLTAGE:
FOCUS
ROTATION
7.
FOCUS POTENTIOMETER:
VDC
1 9
TOTAL ft
7 3 3
UP LIMIT n
DN
8.
ROTATION POTENTIOMETER:
TOTAL 0
C W LIMIT n
C C W LIMIT n
2 0 'D X O
1,01b
/*%■
j c f 7/C>
(a )
Q-----------7*---------------------
to
C BAND n
K BAND
KU BAND A
L BAND n
BY:
(3)
7 ^ -7 3
DATE
LMT/mgc
FIGURE 6:
TYPICAL MECHANICAL CALIBRATION DATA SHEET
43
0)
2.8
System Accuracy Discussion
System errors may be considered to consist of the following
components:
1)
Mechanical errors
2)
Electrical errors
3)
Transducer errors
2.8.1
Mechanical errors
Mechanical errors consist of:
1)
Gear train and mechanism slop (o r lost motion),
linkage relationships of concern are: m otor/brake/
readout pot/mech output.
2)
Mechanical
noise
induced
on
the
readout
pot
output by antenna mechanical vibration (the F/R
position
commands
are often
issued during
an­
tenna slew to a new source) and vibration asso­
ciated
train
with
the drive motor impulses and gear
mesh and mechanical
resonance effects at
certain motor stepping rates.
3)
Mechanical drive errors
associated with noncon­
centricity in the gears, and mechanical deforma­
tion induced by mechanical loading and vibration.
2 .8 .2
Electrical errors
Electrical errors consist of:
1)
Controller errors consisting of time, temperature
and supply voltage-induced
errors in the DAC,
precision reference supply, operational amplifiers
and precision analog comparators.
2)
Analog data readout and conversion errors asso­
ciated
with
the
analog
multiplexing
and
A /D
conversion operation performed by the controller
and Data Set.
a positional
Strictly speaking this error is not
error as such but appears so from
t h e m o n it o r d a t a
44
re a d o u t.
2 .8 .3
Transducer errors
The transducer errors consist of wiper noise, nonlin­
earity and noise induced in the potentiometer lines in the
long run between Bin W and the apex.
As the wiper moves
across the resistance windings the transitions are noisy - if
the noise components are large and long enough they can
cause
the
controller
to
prematurely
reset
the
command
state.
The readout potentiometers have a ±0.015% independent
linearity tolerance which is about the best tolerance realiz­
able in this size unit.
Noise induced in the potentiometer lines by ac coupling
mechanisms can cause premature shutdown of the command
state in the controller.
2 .8 .4
Set point repeatability
Set point repeatability is a measure of the servo gain,
and the level of mechanical and electrical ac noise super­
imposed on the readout pot.
for well-behaved
Typical repeatability values
F/R Mounts with good readout pots and
low noise levels (with the antenna stowed) are:
Focus:
±1/2 LSB, ±0.012%
Rotation: ±3/4 LSB, ±.018%
Mechanical noise, binding in the drive, noisy pots or
noisy readout lines can significantly degrade the set point
repeatability.
Note that set point repeatability is not a measure of
the errors due to mechanism slop, DAC errors, mechanical
and electrical nonlinearity and pot nonlinearity.
2 .8 .5
Error calculations
2 .8 .5 .1 Mechanical errors
Focus d riv e :
VLA-29)
the
From the
F/R
Mount specs (RFP
readout pot error may be as large as
±0.083% and drive accuracy error may be as large as
±0.164%.
The worst case sum is ±0.247% or ±0.03 in.
45
Since these errors are (principally) due to mechanism
slop or lost motion which is non-Gaussian the error
probability density function
is a double hump curve
with the peaks near the ±0.25% limits.
Because the
focus mechanism has a significant vertical component
the drive is probably always near the lower peak so
that the error is probably better than the ±0.25 value.
Mechanical ac noise induced on the readout pot
has
been
observed
to
be
(typically)
~±0.0025% or
~±0.0003 in.
Rotation d riv e :
readout
pot
From the
F/R
Mount specs the
error may be as large as ±0.055% and
drive accuracy error may be as high as ±0.069%.
worst case sum is thus ±0.124% or ±0.45°.
The
The error
probability function is again a double hump curve with
the humps near the ±.125% values.
Since the rotation
mechanism is nearly balanced around the drive axis the
mechanism ranges over the whole ±0.124% range as a
function of a subreflector position, load unbalance and
antenna vibration level.
Mechanical ac noise induced on the readout pot
has been observed to be typically ~±0.01% or ~±.036°.
2 .8 .5 .2
Electrical errors
Electrical errors may be caused by time (1 year
assumed),
temperature
change
(a
28°C
temperature
range assumed) and power supply voltage variations,
(±0.1%
line
and
load variations assumed).
Maximum
value error coefficients from manufacturers data sheets
were used in the error calculations.
The error sources are:
1)
Power supply, (+ and -15 volts) - ±0.1% line
and load regulation from LXD-3-152R specifi­
cations.
46
2)
Temperature change - a temperature span of
50° to 100° or ~28°C assumed.
3)
Time - 1 year.
The components which can be affected by these
sources are:
1)
Zeltex
ZD432 D /A
converter which has the
following specs:
Gain
Temp
Coeff:
±0.002%/°C/
% of
RDG
Zero
Temp
Coeff:
±0.002%/°C,
% of
FSR
Linearity Temp Coeff: ±0.002%/°C/ % of FSR
Long
2)
Term
Analog
Stability:
±0.05%/10,000
hours
Devices AD741LN Operational Ampli­
fie r which has the following specs:
Vq s
Temp
Coeff:
5 |JV/°C
max,
2 |JV/°C
typical
I Os Temp Coeff: 0.1 na/°C max, 0.02 na/°C
typical
PSRR:
15 pV/V
CMRR:
90 dB, min
AOL:
50,000 typical
I B ia s Temp Coeff:
1 na/°C max, 0.6 na/°C
typical
3)
National Semiconductor LM299H which has the
following specs:
Output Temp Coeff:
Long Term Stability:
4)
±0.001%/°C
20 ppm/year.
Dale Precision Resistor temperature - induc­
ed
resistance
change.
specified as <20 ppm /°C.
The
temp coeff is
Since the resistors
are custom built in a single batch the tem­
perature
coefficient
was
assumed
within the <20 ppm/°C bounds.
The error calculation results are:
47
constant
RMS E rror, (most probable situation):
±2.74 bits (out of 4096) or ±0.067%.
Worst Case Error (most pessimistic case):
±4.158 bits or ± 0.1%.
2 .8 .5 .3
Transducer errors
AC noise induced on the potentiometer lines has
been observed to be as high as 250 millivolts (due to
malfunctioning brake controllers or improper wire dress
in the junction boxes or conduit ru n s).
F/R
Systems
usually
exhibit
pot
line
order of 1 mV or ~1/2 bit or 0.012%.
Well behaved
noise on the
Integration in
the F/R controller tends to reduce the effect of noise
frequency components above ~500 Hz.
Pot linearity error is ±0.015%.
these two errors is ±0.019%.
48
The rms sum of
3.0
DETAILED COMPONENTS DESCRIPTION
The following descriptions detail the salient physical and func­
tional properties of these units.
3.1
Focus/Rotation Mount Assembly
The VLA F/R Mount is a mechanical package, located at the
antenna apex, and houses the drive motors, induction brakes,
position potentiometers,
and
limit switches for both focus and
rotation.
This
Company,
assembly
is
manufactured
by
the
Sterling-D etroit
Detroit, Michigan, and is similar to the F/R Mounts
used in the antennas at NRAO, Green Bank.
A fter manufacture
of each mount by S terling-D etroit, these mounts are individually
tested
for
mechanical and electrical
soundness by NRAO/VLA
personnel at the Sterling plant in Detroit.
Refer to NRAO Test
Procedure 98S19010 for details on the tests conducted.
A fter
this manufacturing checkout and acceptance testing, the mounts
are shipped to the VLA where they are installed on the antenna
by
E-Systems during
the antenna construction.
This is done
primarily due to the size and weight of this mount and the
inconvenience of mounting the structure without a heavy-duty
crane.
Electrical outfitting and wiring is performed by the electri­
cal and antenna groups when the antenna is on the maintenance
pad.
The F/R Mount consists of three mechanical rings, of which
the top and bottom rings are fixed and the center ring is mov­
able in two axes.
gear train
The drive motors and a portion of the drive
are contained
in the top ring.
Four guide shafts
which extend from the top to the bottom ring pass through the
movable ring and insure a stable vertical (focus) movement of
the movable ring.
Drive lead screws and a splined drive shaft
between the top ring and the movable ring cause the movable
ring to raise or lower (focus motion) and cause the inner posi-
49
tion of the ring to rotate (rotation motion).
The two induction
brakes, mounted on the top ring, provide braking torque for the
top ring gear trains to inhibit motion due to vibration or gravity
loads except during motion commands.
The top ring gears also
drive the focus and rotation readout potentiometers to indicate
the position of the focus and rotation mechanisms.
The focus upper-limit switch
is located on the top
ring
while the focus lower-limit switch is located on the lower ring.
The
rotation
limit switches are
mounted on the movable ring.
located in a weatherproof box
See paragraph 3.6 for illustra­
tions of the switches on the F/R Mount.
A "barrel" is secured to the inner portion of the movable
ring and the subreflector is mounted to the base of this "bar­
rel".
The
barrel
provides
mechanical
strength
between
the
center
ring
and the subreflector, a distance of about 4 feet.
The rotation drive train has a drive ratio of 108:1 so that
one motor step will produce one arcminute of subreflector rota­
tion.
The focus drive
has a drive ratio of 2.54:1 with a lead
screw pitch of .200 so that one motor step will produce 0.01 mm
of subreflector focus motion.
Figure 7 illustrates the configuration of the F/R components
at
the
apex.
Figure
8 illustrates the
location of the drive
motors, readout pots and brakes on the top ring.
NRAO drawing 98D19126 (2 sheets) "VLA Prime Feed Mount
Assembly"
detail
the assembly of the motors, brakes,
pots, and junction box on the Sterling Mount.
are not included in this manual.
50
readout
These drawings
APEX
D1?M BY: PAUL HARDEW
ADAPTED FROM N R A O
D\AJG &&V19062
FIG. 8
-
F /R AfOUAJT,
ORIVB
AND
CONTROL
COMPOAI£fiJTS
3.2
Slo-Syn Translators and Model Variations
Three models of Superior Electric Slo-Syn translators are
used in the F/R System, these are:
Model
Antenna
Associated Motors
HTR-1500
1
2
HS-1500
HTR-1008
3-20
HS-1500
TM-600
-
21 - 28
M172-FD306
The translators and motors must be used in the combina­
tions shown - they are not interchangeable.
Two sets of spare
HTR-1008/HS-1500 translators/motors and spare logic and driver
boards have been purchased to support antennas 1 - 2 0 and two
sets of TM-600/M172-FD306 and spare logic and d river boards
have been purchased to support antennas 21 - 28.
The reason
for the translater/motor change is that Superior Electric discon­
tinued the older special order models in mid-1978 and replaced
them with the standard sized (and lower priced) TM600/M172FD306 series.
The translator/motor cabling requirements differ for these
two sets in that the older set could use a 5 wire cable while the
newer set requires a 6 wire cable.
quirement
is the
The different cabling re­
result of the difference in drive switching
between the older and new designs.
The old design uses simple
switching in the driver circu itry while the newer design dynami­
cally switches off the drive to minimize motor overshoot.
This
difference requires that the center taps of the new motors be
wired independently while the old motors could operate with both
sets of center taps wired commonly.
Although this one wire
difference may sound triv ia l, its impact necessitates two different
antenna F/R System configurations which are not interchangeable
in the area of the motors and translators.
The HTR-1500 translator/HS-1500 motor torque/speed curve
is shown on Figure 9.
The HTR-1008 produces more torque with
53
th e
HS-1500
motor and
is
sp ecified
as
developing
828 o u n ce-
in ch e s of to rq u e at 1000 ste p s/se co n d and 1600 o u n ce -in ch e s at
360 ste p s/se co n d when in terco n n ected with 150 feet of #10 AWG 5
w ire ca b le .
F ig u re
cu rv e .
10
d e p icts
th e
TM -600/M 172-FD306
to rq u e/sp e ed
T h is combination p ro d u ces tw ice the to rq u e of the o ld er
u n its and h as a fla tte r to rq u e/sp e ed c u r v e .
A s th e name im plies, th e se u n its "tra n sla te " low -level d igital
d riv e p u lse s into h ig h -v o ltag e (50 V ) high c u r r e n t (200 A ) d riv e
p u lse s re q u ire d by th e S lo -S y n step p in g m otors.
R e fe r to tra n sla to r block d iag ram ,
based
a re
on
H T R -1500/1008).
a v a ila b le :
p u ls e s .
The
in sta lla tio n .
and
th e in tern al
routed
in tern a l
F ig u re 11 (nom enclature
Tw o so u rce s of in p u t d riv e
p u lse s
d r iv e o scilla to r and e x te rn a l d riv e
d r iv e o scilla to r
is
not used
in the V L A
D riv e p u lse s a re g enerated b y the M7 F /R Control
to
one
or
two
e x te rn a l
in p u ts
on
th e t ra n s la to r:
d riv e FWD o r d riv e R E V , co rre sp o n d in g to d riv e UP o r CW and
d riv e
DOWN o r CCW fo r fo cu s o r
ro tatio n ,
r e s p e c tiv e ly .
The
in p u t p u lse req u irem en ts a re +12 V to 0 V , 50 psec min p u lse fo r
the
H T R -1 5 0 0 ;
a TTL
p u lse fo r the TM -600.
T h e in p u t p u lse s
a re p ro cessed by th e "d irectio n gating logic" to determ ine w hich
motor d irectio n is d e sire d and the co rre sp o n d in g motor w in d in g s
th a t
need
w hich
to
be
d e p icts the
e n e rg ize d .
See
d raw ing
HTR-1008/1500 control
B13740S1,
logic board
sh e et 2 ,
(A 5 )
c ir ­
c u it r y .
T h is d irectio n ste e rin g is accom plished b y settin g o r re s e t­
ting
d irectio n
flip -flo p s
(H T R -1 5 0 0
tra n s is t o r s
Q 9 -Q 1 2 ).
The
ou tp u ts of th ese flip -flo p s (A1 and A2 fo r F F 1 ; A3 and A4 fo r
FF2)
The
a re th e in p u ts to d r iv e r assem blies A 1 , A 2, A 3, and A 4.
in p u ts to the A 2-A 4 assem bly
is a +0.4 V (o ff) o r -12 V
(o n ) level which t u rn s on the power t r a n s is t o r s (H T R -1 5 0 0 , Q 4,
Q 5, Q 6, connected in p a ra lle l), w hich route a 50 V 200 A shaped
p u ls e
to th e r e s p e c t iv e S lo - S y n
A 4.
See draw ing
B13740S1,
m otor w in d in g ,
sh e et 3,
1008/1500 d r iv e r b o ard c i r c u i t r y .
54
w hich
A 1, A2, A3, o r
d ep icts
the
H TR-
Lo ck -o u t
logic
p re v e n ts
opposing
en erg ized sim ultaneously ( i . e . ,
w in d in g s
from
being
A1 and A 2 ), o r a d riv e command
to be p ro cessed d u rin g a d riv e -sw itc h in g seq u en ce ( e . g . , d riv e
FWD w hile motor is re ce iv in g a d riv e R E V s t e p ) .
An
RC
damping
board
o u tp u t.
sto red
in
a
netw ork
T h is
motor
is connected between each d r iv e r
netw ork
w inding
te n d s
when
to
d issip a te
th e c u r r e n t is
the
e n e rg y
sw itch ed o ff.
Clam ping diodes and an R C c ir c u it augm ent th is actio n .
See the
tra n sla to r schem atic B13740S1, sh e et 1, fo r d e ta ils.
T h e main p o w er-sw itch in g
power
t r a n s is t o r s
G M -D ELC O
ty p e
on
n a te ly
th e se
1977.
placem ent
but
co stly
But
th e se
D TG -2400
a
25
w ere
Germanium
have
power
company
not
been
tra n s is t o r s
d e v ice s
t ra n s is t o r
is
PNP t ra n s is t o r
by
a re
G M -D ELC O
a
fo r
a re ­
s u ita b ility .
h ig h -fa ilu re
replacem ent fo r the
item
and
D TG-2400 to meet
Each H TR -1500 co n tain s 12
D TG -2400 power t r a n s is t o r s (tim es 42 t r a n s la t o r s ! ) .
w ritin g ,
in
It may be n e c e ssa ry to se le ct a
the V L A 's fu tu re m aintenance n e e d s.
of th is
U n fo rtu ­
m anufacturing
evaluated
a re
p e r t r a n s is t o r ) w hich is an im portant
long-term m aintenance co n c e rn .
power
A
Th ese
d isco n tin u ed
another
replacem ent ($ 8 .0 0
silico n
A 1 -A 4 .
H TR -1500 is the
peak power sw itch in g a p p lica tio n s.
tra n s is t o r s
Feb ru ary
The
assem blies
D T G -2 4 0 0 ,
intended fo r high
element of the
a " tra n sla to r te st set"
A t th e time
has been d esig ned and
b u ilt b y the D C S Lab to p ro vid e a dynam ic te st and re p a ir e n v i­
ronment fo r the
The
H TR-1500/1008 d r iv e r and control logic c a r d s .
tra n sla to rs
contain
th e
h ig h -v o ltag e
power
su p p lie s
re q u ire d b y the m otors, and low -voltage power su p p lies fo r the
tra n sla to r
log ic.
120
V
in p u t power is
routed
throug h
M8 to
p ro vid e a con ven ien t sw itch and fu se p an el.
The
draw ing
H TR-1500/1008
B13740S1,
tra n sla to r
sh eet 1.
c h a s s is
w irin g
is
shown on
T h is d raw ing and the o th ers com­
p letely define the tra n sla to r c ir c u it r y .
T y p ic a l
tra n sla to r
and
motor
shown in p a ra g ra p h 4 .2 .
55
d riv e
sig nal
waveform s
a re
The
cab le d raw ing
n o tatio n s,
A1 o u tp u t,
A2 o u tp u t,
e tc .
a re d e riv e d from th e S u p e rio r board d esig n atio n s so th a t w ave­
form o b se rv a tio n s
to
th e
d r iv e r
in th e ju n ctio n boxes may be d ire c tly related
b o a rd s.
F ig u re
13 d e p icts
th e
H TR-1500/1008
board and term inal s t r ip co n fig u ra tio n .
The
HTR-1500/1008
d riv e
p u lse s
p rovid ed
by
th e
F /R
C ontro l u n it a re a low t r u e , 50 Msec p u lse with r is e and fall time
le ss
than
TTL
10 |jsec (m in) p u lse and level trig g e r s on th e tra ilin g (0 to
1)
1 Msec.
ed g e.
The
T h e TM -600 tra n sla to r
F /R
C ontro l
re q u ire s a low tru e
u n it h as been modified to p ro vid e
th is level when it is used with th e TM -600 t ra n s la to r.
T h e TM -600 p ro v id e s in cre a se d motor sh a ft to rq u e (w ith the
model M172-FD306 step motor) in com parison with the H TR -1500/
HS-1500 fam ily.
stab ilizatio n
w hich
P u lse positioning control and ele ctro n ic ch o p p er
schem es elim inate p rim ary motor w inding
reso nance
h e lp s to p ro vid e fu ll motor to rq u e when operating in the
middle fre q u e n c y ra n g e , fe a tu re s not in h e re n t in the H TR -1500/
HS-1500
motor
sy ste m .
F ig u re
12
d e p icts
the
TM -600
block
diagram .
The
TM -600
also
p ro v id e s
two m alfunction
p u ts - power su p p ly and tem perature alarm .
volt power su p p ly
has
been w ired
manual
the
new
T h e tra n sla to r +12
into the F / R Control analog
m ultip lexer fo r monitor data read o u t.
of th is
indication o u t­
tra n s la to rs
A t the time of p rep aratio n
and
motors have operated
sa tisfa c to rily in an ten n as 21, 22 and 24.
T h e TM -600 tra n sla to r in stru ctio n manual is included in th is
p a ra g ra p h .
F ig u re s
14 and
15 show the
F/R
C o n tro l/tra n sla to r
and power w iring fo r the two ty p e s of tra n s la to rs .
56
signal
TORQUE CURVE FOR NSISOO MOTOR
S P E E D (STEPS PER SECOND)
F IG .
9
- A /77 ?
is o o / io o e / n s is o o
TO RQ U E
v s . s p e e d
c h a r a c t e r is t ic s
TORQUE CURVE FOR MI72-FD306 MOTOR
ct
D
SPEED
(STEPS PER SBCOAJD)
FIG . 10 - TM&OO/M!72-FD306 TORQUE vs. SP EED C H A R A C TER ISTIC S
57
INTERNAL
CSC
Me
drive
1
r
“ *} h 50/*5 |i
+tSv i >
OFF
O
- vI
- ACTIVE t
T
r ^
DRIVER
AM PL
1
P ,R £C T^ J
GATING
LO G IC
j
D R IV ER
A2
VtRECTfdN
FLIP-FLOPS
(A)
AMPL
f D R IV E R
\A M P L A 3
1
F /R
OR\\J£ DOW*J
1CCMTRCL
*Al
TO
>A2
MOTOR
>A3 UJlND/AJGS
J DRIVER
\
[AA1PL A 4 \
n
DR>VE UP
{
AI
'
LOGIC Abi\>
DRIVER
p\nr s/*y
-H V
FIG. 11 - HTR ZOOSJ ISCO TRAAlSLATOR, BLOCK DIAGRAM
\
TO
MOTOR
U/^D/AJk5S
& INTERNAL D RIVE OSC. NOT USED /A) \JLA
FfG. 12
-
tmgoo
A P P L IC A T IO N
TRANSLATOR, BLOOh: d i a g r a m
58
F IG . /3
-
H T R /5 0 0 /1 0 0 6
TRA N SLA TO R
P H Y S IC A L
C O N F IG U R A T IO N
RACK-C
6 /A /-W
W7J2
8 Lt<
RO T]
\AJHT
M
M
gu<
H
ro c
WWT
J
WI08
II5VAC G0H2-H!
-L0
£
AC
'u
IISVAC &OHI-HI
-to
-fr
G RN
K
AC
<
A/ie F R
'Vv
PO'N£R SUPPLY
GROUAJP
g r o o a jp
GW
6MP
STUP
WI08
9/oT6I
0 4® 3® 2® ' ® | O
6TUP
P/o TUI £ ® '< ® ?0 * ® ‘0 1 0
rOC XLATOR
fiJOTB! INTRA-BIN WIRING
NOT COLO& CODED
/?<9T XL47W?
(HTR. 1500 CHASSIS)
10 9
<
j\
o
e
7
£>
( u t r IS&0 Ch a s s is )
/ 0 9 8 7 6 s
P/o
re>2
Z GRM-M5V
HH
FOC MOM'TOR
A
V
REP
FOC l?ftIv e U P
CONTROL C
*
Bik
COMMOA0
B
w
WHT
POC PRIV6 P O W M
D
KK
X
FOC
ROT
CONTROL
F
J
EE
£
E
F
M 7 FR
CONTROL
AA
CC
BLR
C,0MM0/0
GRN+I5V
ROT M O M I T O R
f?a?
drne
Rot
BLK
BB WMT
BLK
■ft
lJ—
WI08E
£
c c w
COM MOM
ROT DR I VS CaaJ
CC
Q
Co m m g m
&
§
V»J— W I 0 8 F
\N\PZjJZ
W 3P//J/
it
^A/TEA/A/dS / T///P6/ 2 0
I/-/7 7 ?
10031(500 TRANSLATOR
FIG. 14 - TRANSLATOR /AJTERCOAIAJECT/NQ DIAGRAM
$
SlGAJAL 4 POWER
V)
RACK-C
0/A/-W
SN7JZ
ROT
FOC
M S FR
POVJBR SUPPLY
L BLX
WHT
M
spy
N
BLK
H
m r
J
grh
K
G0H2 -V!
-LO
AC g/?oua) v
DSVfiC G QNZ - W
-LO
//510£
AC
/20V///5\/
SELECTION
GROUND
/
GND
LUG
V°
GN D
l/^ \ j—j-----I
- I — jh— -+-— I-—
(0 0
lu g
& 0
0
0
0
COM HOT HI Hi HZ H5 H<f
n o t e ' intra - b in w ir in g
FO C
NCTf COLOR COP£D
HH
FOC
A
CONTROL
C
b
V
KK
rot
co n tro l
F
J
r-P
E
/V )l F R
CONTROL
F
z
£
V J lV/P2//2
GRKi
0
0
0
0
V
^
^
^
COMA/JON
FOC DRI\JS DOW a)
COMMON
|
GRN
V-/2V/ /? 0 r MONITOR
8EP
ROT D R N E CC\AJ
CC 8LK
U wwt
CC
0
Co m
/? o t
BLK
w io a F
£
mon
CuJ
Co m m o n
u
VJ3PI/JI
A N T G A jm s 21 “ ^ 2 6
translator
|t7V>€QO
F IG - 1 5 - t r a n s l a t o r
in t e r c o n n e c t in g
0
RO T XLA TO R
Ct m s o o )
?h
20 3/,/p__a---
®^?
' J - WIOQE
t
0
n
-/-/2V FOC MOAJirOR
BLK
VOHT
£
>< BLK
EE
0
FOC DRIVE UP
r
x
f
f
XLA TO R
26 31 10 Q
t6 a <£
0
COM H&T Hi H3 N2 H S Hq
(TMGOO)
?lo j
M
d ia g r a m s signal
G row er
0
v
1
REV.
DATE
DRAWN BY
DESCRIPTION
APPRV'D BY
D
SPEED I
CONT
& IN4722
^ /
VLA ANTENNA
USAGE ONLY
PULSE
m o n it o r
^
BLK
♦A1
BLU
C
FROM
DCS WLA)
TEST
SWITCHES
WHT
GRN
RED
>CT
■ *A2
♦A3
♦A4
20VAC
IN
B
KiOTEG*.
I, F O R D E T A I L E D
E L E C T R IC
tm ESS OTHERWISE SPECIFIED
S C H E M A T IC
CO. DW G
R E P E R TO
E M I8 5 2 0 I
DIMENSIONS ARE IN INCHES
S U P E R IO R
RANCES:
£ IZ E 1 C
ANGLES ±
?■ LA C E DECIMALS (.XXX):
-ACE DECIMALS (.XX): ±
-ACE DECIMALS (.X): ±
MA TR IA L:
±
V 8 FOC/ROT SYSTEM
L
A
IHTR1008 TRANSLATOR
I HTR1500 TRANSLATOR
SC H EM ATIC
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
SOCORRO, NEW MEXICO 87801
DRAWN BY
DATE
DESIGNED BY
DATE
APPROVED BY
DATE
SH:
NEXT ASSY
USED ON
SH EET
NUMBER
DRAWING
NUMBER
B13740S1
REV .
SCALE
10UF
W
ESS OTHERWISE SPECIFIED
PENSIONS ARE IN INCHES
cRANCES:
ANGLES ±
‘
CE DECIMALS (.XXX):
CE DECIMALS (.XX): ±
*C E DECIMALS (.X): ±
RIAL:
±
V ? F/R S Y STE M
L
A
i~HTR1008 TRANSLATOR
i
SCHEMATIC
ASSY A5
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
SOCORRO, NEW MEXICO 87801
DRAWN BY
DATE
DESIGNED BY
D A TE
SUPERIOR ELECTRIC.
APPROVED BY
D A TE
H'
SH EET
NUMBER
2 of "3
DRAWING
NUMBER
Bf5740S1
REV.
SCALE
REV.
LLt
DRAWN BY
DATE.
APPRV'D BY
DESCRIPTION
+I”5#5V
RIQ^
6 .0 K
■W V-
DRWfc
IN
5SEt~
V
1N9I4
R9
R0
A A / V - f —V W
330
PCB EDGE
R ll
CO N N ECTO R
150
2W
POWER DRIVE
OUTPUT
rfi
(A1,A2,A3 OR 44)
+15.5V IN
X
■>+IS.5V DISTR
-13.SV IN
z
13.5V DISTR
L
p/to
QROUMO M
IN
CR6
N
P1
1N4722
P
rn
p/o
PI
MOT LG*.
1.TH16 CKT "PULLED'' PROM P C b . REP DESIG DIFFER FROM M FR .
2. PARTS LOCATION) ON MR AO DWG © V 3 7 4 0 P t.
5. CIRCUIT RIGHTS TO SUPERIOR ELECTRIC CO., BRISTOL, CONN.
THIS OWG MADE FOR NRAO USE ONLN.
4. ALL UNMARKED RESISTORS */2 W.
5. Q3 THRO Qfc — DELCO DT6-2400, A VA ILA BLE P R O M
MS E LE C T R O N IC S , 322 N. STOWE. S T R E E T , RO CK VILLE, MO 20850
NO KNOWN D IRECT S U B S T IT U T E ,.
UNLESS OTHERWISE SPECIFIED
DIMENSIONS ARE IN INCHES
. TOLERANCES:
3
ANGLES ±
I A C E DECIMALS (.XXX):
2 P L A C E DECIMALS (.XX):
’ P L A C E DECIMALS (.X):
MATERIAL:
FINISH:
NEXT ASSY
USED ON
±
±
±
V FOC/ROT SYSTEM
L
A
T HTR1008 TRANSLATOR
I
SCHEMATIC
DRIVER ASSY AI.A2MA4
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
SOCORRO, NEW MEXICO 87801
DRAWN BY
DATE
bESIGNEO BY
DATE
w m o z it e r m v c
/M b vco iiY
S S U -itri IS S f 61374051
DATE
REV.
SCALE
INSTRUCTIONS
for
SLO-SYN® TRANSLATOR
Type TM600
INSPECTION
DESCRIPTION
When unpacking the SLO-SYN Translator, examine the unit
carefully for any shipping damage. The “Damage and Short­
age” instruction packed with the unit outlines the procedure
to follow if any parts are missing or damaged. Check to see
that the following items have been received.
The TM600 is an open chassis unit which incorporates a
d-c power supply together with the sequencing and switching
logic needed for bidirectional control of. a SLO-SYN Stepping
Motor. It will drive a SLO-SYN motor in either the half-step
(0.9° increments) or the full-step (1.8° increments) mode and
is intended for base mounting.
1. SLO-SYN Translator Type TM600.
2. Eight terminals for #14— #16 wire, Superior Electric part
number 8244*009.
3. One terminal for #14— #16 wire, Superior Electric part
number 8244-002.
4. Base speed control potentiometer, 10K ohms, V2 watt lin­
ear taper, Superior Electric part number 144664-004.
The TM600 receives pulses from a minicomputer, micro­
processor or similar pulse source and converts the pulses
into the switching sequence needed to drive a SLO-SYN motor
in steps. The external pulse source controls the step rate,
direction, acceleration, deceleration and the number of steps
taken. An internal oscillator is also provided for manual or
“off-line” positioning.
5. High speed control potentiometer, 500K ohms, Ya watt,
CCW audio taper, 10 turn, Superior Electric part number
201893-001.
t h e
SUPEBIOR ELECTRIC c o m
B r is t o l, C o n n e c t ic u t 0 6 0 X 0
65
p a n y
SPECIFICATIONS
Dimensions (Maximum) ...... length: 15%" (400mm)
width: 13%" (333mm)
height: 10W' (260mm)
Weight (Maximum)............. 54lbs. (24.5kg)
Power Input Requirement .... 120/220/240 VACtJJjJ
50/60 hertz, 12 amperes
maximum
Temperature Range ........... operating: 0°C to+55°C air
temperature at fan intake port
storage: —40°C to +85°C
Internal Oscillator
Range .......................... base speed: 0 to 1000 pulses
per second (0 to 2000 pulses
per second in half-step mode)
high speed: 200 to 10,000
pulses per second (400 to
20,000 pulses per second in
half-step mode)
Stability ....................... ±15% or ±50 pulses per
second, whichever is greater,
over stated temperature and
voltage ranges
Acceleration and
0.05 to 1.7 seconds,
Deceleration Ranges
potentiometer adjustable
10k ohm, single-turn, linear
Base Speed Control
taper potentiometer
500k ohm, ten-turn, CCWaudio
High Speed Control
taper potentiometer
Half-Step/Full-Step Mode Selection
High Level ................... open circuit, 3.2 VDC to 6 VDC
Low Level..................... 0 to 0.5 VDC
Loading ....................... 4mA sink max.
LowVoltage Sense
High Level ................... open collector output rated at
30 VDC max.
Lowlevel..................... 0 to 0.7 VDC
Loading ....................... 30mAsink max.
Fall Time ..................... 2 microseconds max., 1000
ohms to 30 VDC max.
Rise Time ..................... 2 microseconds max., 1000
ohms to 30 VDC max.
Fault Condition ................ motor voltage below 40 VDC
+12 VDC bias voltage
below +9.5 VDC
—12 VDC bias voltage
above —8.5 VDC
High Temperature Monitor
High Level .................... open collector output rated at
30 VDC max.
Low Level ..................... 0 to 0.7 VDC
Loading ....................... 30mA sink max.
Fall Time ..................... 2 microseconds max., 1000
ohms to 30 VDC max.
Rise Time ..................... 2 microseconds max., 1000
ohms to 30 VDC max.
Temperature Trigger
Conditions ................... logic 1 to logic 0 transition
when heat sink temperature
rises to 195°F ±9°F
(90°C ±5°C)
logic 0 to logic 1 transition
when heat sink temperature
drops to 165°F ±9°F
(74°C ±5°C)
TTL Compatible Input/Output Signals
Pulse Output
High Level ................... open coilector, rated at 30 VDC
Low Level..................... 0 to 0.7 VDC
Loading ....................... 30mA sink max.
Fall Time ..................... 2 microseconds max.,
1000 ohms to +30 VDC max.
Rise Time ..................... 2 microseconds max.,
1000 ohms to -{-30 VDC max.
Pulse Width .................. 10 to 25 microseconds
Pulse Input Terminals
High Level ................... open circuit, 3 VDC to 6 VDC
Low Level ..................... 0 to 0.5 VDC
Loading ....................... 4mA sink max.
Pulse Input Requirements
Fall Time ..................... 2 microseconds maximum
Rise Time ..................... 2 microseconds maximum
Pulse Width .................. 10 microseconds min.
Trigger Edge ................ 0 to 1 level transition (Trailing
edge) advances motor shaft
Direction Control
High Level ................... open circuit, 3.2 VDC to 6 VDC
Low Level ..................... 0 to 0.5 VDC
Loading ...................... 4mA sink max.
RS232C Compatible Input/Output Signals
Pulse Output
High Level .....................+8 VDC to+12 VDC
Low Level..................... .—8 VDC to —12 VDC
Loading ........................3k ohm min.
Fall Time* ................... .1 microsecond max.
Rise Time* ................... .1 microsecond max.
Pulse Width ...................10 microseconds min.
Pulse Input Terminals
High Level .................... +3 VDC to+25 V0C
Low Level ..................... —3 VDC to—25 VDC
Loading ....................... 3k ohm min.
Pulse Input Requirements
Fall Time* .................... 3 microseconds max. for
25 VDC input
Rise Time* ................... 3 microseconds max. for
25 VDC input
Pulse Width .................. 10 microseconds min.
Trigger Edge ................ 0 to 1 transition (trailing edge)
advances motor shaft
Direction Control
High Level ................... +3 VDC to+25 VDC
Low Level .................... —3 VDC to —25 VDC
Loading ....................... 3k ohms to 7k ohms
Base Speed and High Speed On/Off Controls
High Level ................... open circuit, 3.2 VDC to 6 VDC
Low Level ..................... 0to0.5VCC
Loading ...................... 4mA sink max.
2
66
Bass Speed and High Speed On/Off Controls
High Level .................... +3 VDC to+25 VDC
Low Level ................... —3 VDC to —25 VDC
Loading ....................... 3k ohms to 7k ohms
clearances required to allow removal of the cover and printed
circuit boards. In any case, a minimum clearance of 2 inches
must be provided all around the unit to allow proper air cir­
culation. Details on replacing the circuit boards are given
in the Service section of this manual.
Half-Step/Full-Step Mode Selection
High Level .................... +3 VDC to+25 VDC
Low Level..................... - 3 VDC to-2 5 VDC
Loading ....................... 3k ohms to 7k ohms
LowVoltage Sense
High Level ...................
Low Level.....................
Loading .......................
Rise Time .....................
Fall Time .....................
Fault Condition .............
High Temperature Monitor
High Level ...................
Low Level.....................
Loading .......................
Rise Time .....................
Fall Time .....................
Temperature Trigger
Conditions ...................
A kit to allow rack mounting of the TM600 is also available.
The kit, part number 207800-001, includes a 19" (483mm)
wide by lOVfe" (267mm) high panel, two mounting brackets
and the necessary hardware.
+8 VDC to+12 VDC
- 8 VDC to -1 2 VDC
3kohmsmin.
1 microsecond max.
1 microsecond max.
motor voltage below 40 VDC
+12 VDC bias voltage
below+9.5 VDC
—12 VDC bias voltage
above —8.5 VDC
9X>
+8 VDC to+12 VDC
- 8 VDC to-12 VDC
3k ohms min.
1 microsecond max.
1 microsecond max.
logic 0 to logic 1 transition
when heat sink temperature
rises to 195°F dt9°F
(90°C ±5°C)
logic 1 to logic 0 transition
when heat sink temperature
falls below 165°F ±9°F
(74°C ±5°C)
*The rise or fall time may be calculated as follows:
T rise or T fall — 90% °* h'gh ^eve^—90% of low level
slope
where slope = ------ ——*s----4% of pulse width
for example, if the high level is +12 VDC, low level is
—12 VDC and pulse width is 10 microseconds,
g
$'ope = r o 4 3 T iF = 1 5 v o 'ts/,,sec-
T rise or T fall =
(12 x 0 91 ~ (~ 12 x 0 91 = 1.44 ^ec. max.
15
MOUNTING
The TM600 is an open chassis unit designed for base mount­
ing. Horizontal mounting on the floor of an enclosure is the
preferred method due to weight and accessibility considera­
tions. Mounting holes are provided in the flanges at the base
of the unit.
When planning the installation, it is important to allow suffi­
cient room for servicing the unit. Figure 1 shows the minimum
MOUNTING DIMENSIONS
FIGURE 1
67
3
ELECTRICAL INSTALLATION *
The electrical installation consists of three parts: Motor Con­
nections; Control Interface; and AC Input Connections. Figure
2 shows a typical installation and identifies the Motor, Con­
trol and AC Input wiring.
to provide maximum noise immunity and minimum emi (radi­
ated or conducted noise).
INTERFACE
The TM600 uses two distinct interface methods. The first is
called negative logic which means that the control will carry
out the intended command when that input is at a low voltage
level. The requirements of this low level are given in the
specification for the respective input terminal. Each terminal
is pulled up to -f 12 VDC. Any device which pulls the input
to the specified low level, such as an open-collector TTl
device, a transistor or a switch is capable of activating the
input
MOTOR CONNECTIONS
Six of the eight terminals for #14— #16 wire provided with
the TM600 should be used for making the motor connections.
As shown in the Connection Diagram, Figure 3, one phase of
the motor should be connected to terminals 7, 8 and 9 of one
motor drive circuit board and the other phase to terminals
7, 8 and 9 of the other motor drive board.
CAUTION: It is extremely important that the motor be con­
nected correctly. Double check the wiring at the
motor terminals and at the drive boards before
energizing the translator.
The three recommended interfacing techniques are shown in
Figures 4, 5 and 6 using the CCW PULSE input as an example.
The second interface method is one which is compatible with
applicable paragraphs of the Electronic Industries Association
Standard RS232C. Basically RS232C defines voltage and load
requirements for interface circuits. These requirements are
reflected in the TM600 specifications for the RS232C I/O
terminals. The recommended interfacing technique uses in­
tegrated circuits specifically designed to meet RS232C re­
quirements. Using the CCW PU (RS232C) input of the TM600
as an example, Figure 7 shows the recommended interface
technique.
The three leads for each motor phase must be twisted to­
gether their entire length to avoid stray inductance. For dis­
tances up to 15 feet, use #14 wire. For distances between 15
feet and 50 feet use #10 wire. If motor leads longer than 50
feet are necessary, consult the factory for recommendations.
The motor shell must be connected to earth ground by a
separate lead or via the machine to which it is attached. The
motor leads should be routed along an axis 90° to 180° with
respect to the axis along which the power leads are routed
CO N TRO L
IN T E R F A C E
W IR IN G
M O TO R
W IR IN G
WARNING: Voltages required for operation of this unit can
cause injury. Therefore, only persons qualified to
install and service electronic equipment should
perform installation or servicing procedures on
this unit.
4
TYPICAL INSTALLATION
FIGURE 2
68
i:s u
j —
*. c —
I
JL
prrgmm
W*COFOft
»W V. WPVIT.
H CXtH TO WAMJALPDft OTHER IM^/T
V O C T A fttt.
m
®2
0
a
stesn.
0s
04
C?
c3
A-C _ / -
<#
HOT
INPUT
Ll«?
COM .
TBI
A1-TB1
TM6QO
TRANSLATOR
- (N O C O N N EC TIO N )
■J42V. A-C C.T. - POWER SUPPLY INPUT COWtfCDOHS)— <
CONNECTION DIAGRAM
FIGURE 3
HMWL
►12*1
STW P
K
100
*
CCW PO -
t
IN914
Or (quo.
SIG N AL
COMMON
N EG A TIVE LOGIC IN TERFA CE
D IS C R E T E OPEN COLLECTOR
N EG A TIV E LOGIC IN T E R F A C E
SWITCH CLO SURE TO SIGNAL COMMON
♦ )Aj»l b« pcmtKx tlynol »lnc« tror»l»<orocti at on tivmrtmr.
SWITCH CLOSURE TO SIGNAL GROUND
FIGURE 4
TE R M IN A L
DISCRETE OPEN CONNECTOR
FIGURE 5
+ 12V.
♦
ccw pu -
> -
-tV
T4 0 6 (T T L )
C O C 8 1 (CM O S)
N EG A TIV E LOGIC IN T E R F A C E
T T L or CMOS
OPEN CO LLEC TO R IN TEG R A TED CIRCUIT
^ ****
m
»»«l »lre«trrtn pen3»>mmWr.
OR CMOS INTEGRATFO CIRCUIT INTERFACE
FIGURE 6
*
ccw pO -
O 7 51 68
(Un* C*lvw)
'
(I m Ai
E I A - R S 2 3 2 C LOGIC IN T E R F A C E
M m l Cx «»qoi>»« » *^ o l Hrc< d»»n« o tt» o» on <n»yt
EIA — RS232C INTERFACE TECHNIQUE
FIGURE 7
INTERFACE (Cont'd.)
Direction Control
As an alternative to supplying pulses to CCW PULSE input,
terminal 10 (13), for counterclockwise rotation, the CCW
DIRECTION input, terminal 9 (16) can be used to control direc­
tion with pulses being supplied only to CW PULSE input, ter­
minal 8 (15). With pulses supplied to the CW PULSE input the
motor will turn clockwise (as determined facing the name­
plate end of the motor) when CCW DIRECTION is deactivated
and counterclockwise when CCW DIRECTION is activated.
INTERFACE CONNECTIONS
All interface connections are made to the 35-terminal con­
nector on the Oscillator/Translator board. It is recommended
that these connections be made with shielded cable (Alpha
Wire Corporation #5313 or #5303; Beldon Corporation #9541
or equivalent). #22 or #24 wire is suggested. The wire need
only be stripped and tinned. Connect one end of the shield to
signal common (pin 31 or 32 on the connector). Terminal num­
bers for RS232C connections are given in parentheses.
Step-Mode Selection
The translator is normally in the full-step mode. The half-step
mode is selected by activating the HALF-STEP input, terminal
11 (17). In the full-step mode each input pulse results in a
motor step increment of 1.8°. In the half-step mode, the step
increment will be 0.9°.
For the purposes of this discussion, the following terms are
defined.
"low level” for negative logic interface.... 0 to 0.5 VDC
“high level’’ for negative logic interface ... 3.2 to 6 VDC
“low level” for RS232C................... —25 to - 3 VDC
“high level” for RS232C..........................3 to 25 VDC
In the full-step mode, the windings are energized in a fourstep sequence as shown in the following chart.
SWITCHING SEQUENCE
FULL-STEP, TV/O WINDINGS ON MODE
For the negative logic interface, the function is activated
when the input is at a low level. For RS232C logic, the func­
tion is considered activated when the input is at a high level.
MOTOR LEAD OR TERMINAL
SWITCHING
STEPf
RED
(1)
WHITE/REO
0)
WHITE/G3EEM
(4)
GREEN
(5)
Base Speed Controls
1
ON
OFF
OFF
ON
The 10k ohm potentiometer for base speed control should be
connected to terminals 6, 23 and 24 as shown in Figure 3.
This control adjusts the internal oscillator base frequency
within a range of 0 to 1000 full-steps or 0 to 2000 half-steps
per second. The oscillator will run at the base frequency set­
ting when the BASE SPEED input, terminal 7 (18) is activated.
The translator will drive the motor at base speed whenever
the PULSE OUTPUT terminal 22 (26) is connected to the
CW PULSE input, terminal 8 (15) or to the CCW PULSE input,
terminal 10 (13). The required sequence is to first connect
the pulse output terminal to the desired pulse input terminal
and then activate the base speed input.
2
ON
OFF
ON
OFF
3
OFF
ON
on
OFF
4
OFF
ON
OFF
ON
1
ON
OFF
OFF
ON
t Provides clockwise shaft rotation as viewed from nam eplate end of motor.
For counterclockwise rotation, switching steps w ill be performed in the re­
verse order.
When the translator is operating in the half-step mode, the
windings are energized in an eight-step sequence as shown in
the switching sequence chart for half-stepping.
HALF STEP MODE
Acceleration and deceleration are not provided in the base
speed mode since the base speed, by definition, is a rate at
which the motor will start and stop without error. The opti­
mum base speed setting is dependent on motor frame size
as well as external frictional and inertial loading.
MOTOR LEAD OR TERMINAL
SWITCHING
STEP f
RED
(1)
WHITE/RED
(3)
WHITE/GREEN
(4)
CREEN
(5)
ON
1
OFF
OFF
OFF
2
ON
OFF
OFF
ON
High Speed Control
3
ON
OFF
OFF
OFF
Connect the 500k ohm 10-turn potentiometer supplied to ter­
minals 4 and 5 as shown in Figure 3. This control adjusts the
high frequency of the oscillator within a range of 200 to
10,000 pulses per second in the full-step mode or 400 to
20,009 pulses per second in the half-step mode. Changing the
setting of the base speed control will affect the high fre­
quency to a small degree. The oscillator will run at the high
frequency setting when the HIGH SPEED input, terminal 12
(14) is activated. The correct sequence is to first connect the
pulse output terminal to the desired input pulse terminal and
then to activate the high speed input. Since the base speed
setting v/ill affect the high speed frequency, recheck the high
speed after adjusting the base speed.
4
ON
OFF
ON
OFF
5
OFF
OFF
ON
OFF
6
OFF
ON
ON
OFF
7
OFF
ON
OFF
OFF
8
OFF
ON
OFF
ON
1
OFF
OFF
OFF
ON
Use of the half step operating mode provides greater posi­
tioning resolution together with a lessening of the effect of
primary motor resonance.
Acceleration and deceleration are provided when operating in
the high speed range. Activating the high speed input will
cause the motor to ramp up from the preset base speed to
the high frequency setting. When the high speed terminal is
deactivated the motor will ramp down and stop.
Since mode selection must not be switched wl.ile the motor
is stepping, it is suggested that this function be hard wired.
For half step mode selection, connect the HALF STEP input
terminal 11 to Vo terminal 31, or connect the RS232C HALF­
STEP input terminal (17) to -f-12V, terminal 23.
t Provides clockwise shaft rotation as viewed from nam eplate end of motor.
For counterclockwise rotation, switching steps w ill be performed in the re­
verse order.
70
External Pulse inputs
As mentioned previously, pulses must be supplied to the
CW PULSE input, terminal 8 (15), for clockwise rotation of
the motor shaft and to CCW PULSE input, terminal 10 (13),
for counterclockwise rotation. Input pulse requirements are
given in the specifications section.
a 0 to 2000 pulse per second range in the half-step mode.
Acceleration and deceleration are not provided since the
base speed, by definition, is a rate at which the motor v/ill
start and stop without error. The optimum base speed setting
is dependent on motor frame size as well as on external
frictional and inertial loading.
Puiss Output
Recommended maximum base speeds for each motor type
are given in the table.
Pulse output of the internal oscillator is available on PULSE
OUT, terminal 22 (26).
RECOMMENDED MAXIMUM BASE SPEED
Lew Voltage Monitor
This function monitors the various internal voltage supplies
and is activated when these voltages go below a safe oper­
ating level. The signal itself is labeled FAULT and is brought
out on terminal 20 (27). Whenever a low voltage condition
exists the Fault signal will latch even though the actual con­
dition may be momentary.
MOTOR
TYPE
High Temperature Monitor
This signal is activated by a thermostatic switch mounted on
one of the drive board heat sinks. The HIGH TEMPERATURE
output is on terminal 21 (25). Thu temperature switching
levels are defined in the specifications.
MAXIMUM BASE SPEED,
NO LOAD
(STEPS PER SECOND)
M092-FD-310
550
M 093-F0-301
475
M112-FJ-326
350
M172-FD-306
210
M 172-FD-308
175
High Speed Control
This control adjusts the oscillator high frequency within a 200
to 10,000 step per second range in the full-step mode and
within a 400 to 20,000 step per second range in the half-step
mode. Since the base speed setting will affect the high speed
frequency output, the high speed setting should be rechecked,
whenever the base speed is readjusted.
INPUT VOLTAGE CONNECTION
WARNING: Voltages required for operation of this unit can
cause injury. Therefore, only persons qualified to
install and service electronic equipment should
perform installation or servicing procedures on
this unit
Base Speed/High Speed Switch
The translator will drive the motor in the base speed mode
when the base speed terminal is activated and in the high
speed mode when the high speed terminal is activated. A
direction must be selected before actuating the base speed
or the high speed.
The TM6C0 is wired at the factory for operation from a
120 volt
50/60 hertz, power source capable of pro­
viding up to 12 amperes. The unit can also be operated from
220 or 240 volt a-c, 50/60 hertz sources by making the proper
wiring changes to the primary of the power transformer.
These changes are made at terminal strip TB1 and are shown
in the TM600 Schematic Diagram, Figure 13.
Direction Switch
This function selects either the clockwise or the counter­
clockwise direction of motor shaft rotation (facing nameplate
end of motor). When operating from the internal oscillator,
the direction must be selected before activating the base
speed or high speed.
Once the transformer primary connections h3ve been matched
to the voltage of the power source, the input power connec­
tions can be made to terminal strip T31 as shown in Figure 3.
Half-Step Control
Be sure to connect the chassis grounding stud to a suitable
ground. Terminal lugs are provided for making these connec­
tions. Use two smaller lugs for the a-c input connections and
the larger lug for connecting to the grounding stud. It is rec­
ommended that #14 v/ire be used for the power connections.
This function determines whether the motor will be driven in
the half-step or the full-step mode. The motor will take 0.9°
steps in the half-step mode and 1.8° steps in the full-step
mode. The stepping mode must not be changed while the
motor is stepping. Therefore, it is recommended that this be
a hard wired function.
The a-c input leads should be routed along an axis 90° to
180° with respect to the path of the motor leads.
SEQUENCE OF OPERATION
Operating From The Internal Oscillator
Check for proper a-c input and transformer primary connec­
tions before energizing the translator. Energize the unit and
check to see that there is full supply voltage between the hot
and common leads and between the hot lead and the chassis.
There should be zero volts between the common lead and
the chassis.
The Connection Diagram, Figure 3, shows a recommended
method of using toggle switches to operate the translator
from the internal oscillator. Proceed as follows:
a. Select the half-step or the full-step mode of operation.
The mode selection should be hard wired.
OPERATION
b. Place the Direction switch in the CW or the CCWposition.
The functions of the controls for the TM600 are as follows:
c. Place the Base Speed/High Speed switch in th e Base
Speed position. The Translator will drive the motor at
the base speed. Start and stop the motor by moving
Base Speed Control
This control adjusts the internal oscillator base speed within
a 0 to 1000 p u lse p er se co n d rang e in th e full ste p m ode and
th e s w itc h b e tw e e n B a se Sp eed an d O ff.
71
7
SEQUENCE OF OPERATION (Cont'd.)
d. Adjust the Base Speed control to select the fastest rate
quired for the voltage to drop from 11 volts to 4 volts when
the switch is moved from High Speed to Off is the deceler­
ation time. The acceleration or deceleration time m3y be
changed by adjusting the appropriate potentiometer on the
Oscillator/Translator circuit board (Figure 11).Turn the poten­
tiometers clockwise (facing screw end) to increase the ramp
times or counterclockwise to reduce the times. Adjust R36
to change acceleration and R24 to change deceleration.
at which the translator will reliably start and stop the
motor. Then decrease the base speed by 20 steps or
10%, whichever is greater, to provide a safety margin.
It is recommended that a larger safety margin be pro­
vided if load variations are anticipated or if a very low
base speed is used. The base speed should be adjusted
above the range shown with a dotted line in the per­
formance curve for the motor used. If it is necessary to
operate the motor in the dotted area of the speed
range, refer to the discussion of resonance control in
the performance section.
Recommended minimum acceleration times for each motor
are listed in the chart.
RECOMMENDED MINIMUM ACCELERATION TIMES
e. To operate in the high speed range place the Base
Speed/High Speed switch in the High Speed position.
The oscillator will accelerate the motor from base speed
up to the selected high speed and will decelerate the
motor when the switch is moved to the Off position.
b. Apply pulses to terminal 8 (15) for CW rotation (facing
nameplate end of motor) or to terminal 10 (13) for CCW
rotation. Pulses must meet the Pulse Input Require­
ments given in the Specifications section. Since the
motor cannot instantaneously follow a pulse train at a
frequency higher than its maximum base speed, the
pulse rate must be accelerated and decelerated at rates
compatible with the specific motor frame size and the
load characteristics.
550
10,000
0.1 6 4
M093-FD-301
0.64
(1.87)
475
10,000
0 .2 5 2
M112-FJ-326
2 .7 5
<8.05)
350
10,000
0 .3 7 2
M 172FD -306
21
(61)
210
6,0 0 0
0.766
M172-FD-308
21
(61)
175
5,500
1.132
Pulse Position Control
For example, the full-step torque shown in the performance
curves is based on the fact that each winding (A, A', B, B') is
on 50% of the time and off 50% of the time. This timing is
commonly known as a 50/50 translator duty cycle. When
pulse positioning is used the 50% on time will decrease, thus
lowering motor torque when compared with the full-step
mode. The curve in Figure 8 indicates approximate torque
loss when the Pulse Position control is fully counterclockwise.
CAUTION: Voltages are present on this unit which can cause
injury. Therefore, only persons qualified to service
electronic equipment should perform adjustments
or servicing procedures on this unit.
Note: The Base Speed adjustment must be completed before
adjusting acceleration and deceleration.
To adjust the ramps, connect an oscilloscope probe to TP12
on the Oscillator/Translator circuit beard (see Figure 11).Con­
nect the scope probe common to TP7 and trigger the scope
externally using the HIGH SPEED INPUT, TERMINAL 12. When
in
the
The following technique can be used to calculate torque loss
at a given speed with any adjustment of the Pulse Position
Control. Connect a scope probe to R83, R84, R85 or R35 on
the Oscillator/Translator circuit board (Figure 11) and connec
the sc o p e probe ground to Vo (term inal 31 or 32). The t ra n s ­
lator waveform shown on the oscilloscope will allow calcula­
tion of the percentage of “on" time which is necessary in
order to determine torque loss.
High
Sp.oed position, the voltage on TP10 will rise from 4 volts to
a nominal of 11 volts. The time required for this voltage rise
to occur is the acceleration time. Conversely, the time re­
8
0.42
(1 2 3 )
An alternate method of controlling this motor characteristic
is a feature of the TM600 called “Pulse Positioning”. This
technique utilizes a form of electronic damping to virtually
eliminate motor resonance. The “One Winding On” mode is
used as the braking mode for this technique, so there will be
some loss of motor torque.
Adjusting Acceleration and Deceleration
is p la ced
M 092-FD-310
The part of each speed vs. torque curve represented with a
dotted line is an area of possible resonance. Depending on
the amount of friction and inertia in the system. The motor
may not operate satisfactorily at the speeds shown in the
dotted area. Operating in the half-step mode may provide
satisfactory operation in this range, but again this is de­
pendent on the load characteristics.
a. Select the half-step or the full-step mode. This should
be a hard-wired function since the stepping mode must
not be changed while the translator is driving the motor.
S p e ed s w itc h
M IN IM U M
ACCELERATION
TIM E.
(SECONDS)
Performance characteristics for motors compatible with the
TM600 are given in the performance curves.
To operate the TM60O from an external pulse source, pro­
ceed as follows:
S p e e d /H ig h
FINAL
VELOCITY,
(FULL STEPS
PER SECOND)
PERFORMANCE CHARACTERISTICS
Operating From External Pulse Input
B a se
INITIAL
VELOCITY,
(FULL STEPS
PER SECOND)
MOTOR
TYPE
Acceleration and deceleration are factory adjusted to
their maximum settings. In many applications these
ramps can be reduced, depending on the combination
of motor and load. Refer to “Adjusting Acceleration and
Deceleration" for instructions on changing the ramp
times.
th e
ROTOR
INERTIA,
L B -IN i
(kgem *)
72
Figure 9 represents a typical translator logic waveform. The
“on time” is designated "t on" and the amount of "on time”
lost because of the Pulse Position control adjustment is
designated “t one on”. The ratio of t one on/t on is the per­
centage of on time lost due to the Pulse Position control
adjustment. Subtract this percentage from 100% and use the
resulting number to determine actual torque loss from the
curve in Figure 10.
m
'ton*
TRANSLATOR LOGIC WAVEFORM
In Figure 9, t one on is one division and t on is five divisions,
therefore the ratio of t one on to t on is 20%. Subtracting
20% from 100% gives a Percentage Of Translator On Time
value of 80%. Figure 10 shows that 75% of full-step torque
is available at this setting of the Pulse Position control.
TYPICAL TRANSLATOR LOGIC WAVEFORM
FIGURE 9
T Y P IC A L PERFORMANCE C H A RA C TERISTICS
APPROXIMATE TOROUE LOSS WITH PULSE
POSITION CONTROL FULLY COUNTERCLOCKWISE
FIGURE 8
PERCENT TORQUE VS. TRANSLATOR ON TIME
FIGURE 10
TYPICAL PERFORMANCE CHARACTERISTICS
•....... 9t
m
»0
no
m *« b
m4
f
>
\
*
v u
y
'
rVt
If9 l
POWf fi
I©•
V
/
»O O 0
8 0 0 0
1 0 0 0 0
1 2 0 00
(W A T T S )
S ' * out
src F i
V K 300 1
S P E E D (S T E P S P C T SfCO N O )
M092-F0310
4
« v W it c u » ig ir
MH2-PJ326
TV«00-
3
CUWPOif
■
'JWJtlf)
V
I
(***_/ $rt*:i=
/
woo
>
►
N
rn* A.
»»V \
j* «
i—.. r .
I*Ul $ri>|
»»
>
.
jr. _ m_o fr-^jo
moo ««oo «ouo
N
1*1
400^
*
«onp
S P t E O (S T E P S PtR S f C O K )!
M»7?-FDV>a
JSH09-U/rXDKv-«c»
73
9
PERFORMANCE CHARACTERISTICS (Cont'd.)
3. Be sure that the SLO-SYN motor is a correct model for
use with the TM600 translator.
Mid-Range Stability Control
4. Be sure that the proper procedure is being used in oper­
ating the translator.
AH stepping motors exhibit an instability in speeds ranging
upward from 1000 steps per second which can result in
"holes" in the speed-vs. torque curves due to loss of syn­
chronization or rotor velocity modulation. The TM600 is
equipped with a Stability Control which utilizes velocity in­
formation obtained from the electronics to compensate for
rotor velocity modulation. Since each motor requires a dif­
ferent amount of stabilization, a 4-position DIP switch (SW1)
is provided on the Oscillator/Translator board (Figure 11) to
allow the circuit to be adjusted for each motor. The switch
positions for each motor are listed in the chart.
5. Check to see that triggering pulses are being received /
terminal 8 (15) for clockwise motion. For CW motion, pulseV
must be received at terminal 10 (13) or, alternately, a
CCW Direction signal must be present on terminal 9 (16).
Pulses must not be present on Terminals 8 (15) and 10 (13)
simultaneously.
6. With an oscilloscope, check the collector to emitter wave­
form (Vce) of the power output transistors to see that the
motor windings are being energized in the proper sequence.
Connect the probe ground to terminal 5 of either Motor
Drive circuit board. Connect the scope probe to terminals
8 and 9 on each Motor Drive Board one at a time and check
the waveform. A typical waveform is shown in Figure 16.
Each division on the vertical scale equals 50 volts.
CAUTION: Voltages are present on this unit which can cause
injury. Therefore, cnly persons qualified to service
electronic equipment should perform adjustments
or servicing procedures on this unit.
MOTOR
POSITION 1
POSITION 2
POSITION 3
POSITION 4
M172 FD-306
OFF
OFF
OFF
OFF
M172-FD-303
OFF
OFF
OFF
ON
M112-FJ-32S
OFF
OFF
OFF
ON
M093-FD-301
OFF
OFF
ON
OFF
M092-FD-310
OFF
ON
OFF
OFF
Due to their larger size, M112 and M172 motors must be run
at a higher current level. A DIP switch on each motor drivs
board (Figure 12) provides this increase. The unit is adjusted
for 4 amperes per phase. To change the level to 5 amperes
per phase for M112 and M172 motors, set positions 1 and 2
of SW1 on the motor drive board to OFF. The power must be
off when making this change.
Duty Cycle
TYPICAL WAVEF03M
FIGURE 16
It is difficult to specify a meaningful Duty cycle rating for
each motor because of the variety of mounting configurations,
speeds and loads encountered in each possible application.
None of the motors specified for this drive will operate con­
tinuously under all speed and load conditions v/ithout ade­
quate heat sinking. The limiting factor, in any case, is the
maximum motor shell temperature which must not exceed
90° C.
7. If the motor will not drive the load at the desired speed
and the preceding checks indicate the translator is oper­
ating correctly, the combination of friction load and inertia
may be too great for the motor to overcome. This situation
can usually be overcome by reducing the operating speed.
In severe cases, it may be necessary to use a motor having
a higher torque rating or to drive the load through a speed
reduction gear train.
INITIAL INSTALLATION CHECKOUT
SERVICE
If the Installation and Operation instructions have been fol­
lowed carefully, the TM600 translator should operate properly
with no further adjustments. Should the unit fail to step the
motor properly, perform the following checks.
If a problem develops with a circuit board, the board should
be removed and returned to the factory for service. Consult
the factory if a malfunction occurs that cannot be cured by
the preceding checks. To remove the circuit boards proceed
as follows:
CAUTION: Volt3ges are present on this unit which can cause
injury. Therefore, only persons qualified to service
electronic equipment should perform adjustments
or servicing procedures on this unit.
1. Check all installation wiring carefully for wiring errors or
poor connections.
CAUTION: Voltages are present on this unit which can cause
injury. Therefore, only persons qualified to service
electronic equipment should perform adjustments
or servicing procedures on this unit.
2. Check to see th a t the correct a-c power level is being
1. Turn o ff the
a-c power to the translator and
for the d-c power supply to discharge.
supplied to the translator and that the power transformer
primary connections are correct for the input voltage.
10
w ait
30 secon
2. Remove four screv/s in the top cover and remove the cover.
74
R 24 (DECEL. ADJUST.)
R 36 (ACCEL. ADJUST.)
R35
OSCILLATOR/TRANSLATOR CIRCUIT BOARD
FIGURE 11
DIP SWITCH
MOTOR DRIVE CIRCUIT BOARD
FIGURE 12
75
SERVICE (Cont'd.)
3. To remove either Motor Drive circuit board, proceed as
follows*.
4. To remove the Oscillator/Translator circuit board, proceed
as follows:
a. Disconnect the fiat cable connector at the top of the
board.
a. Disconnect the flat cable connector at the top of the
circuit board.
b. Disconnect the motor and power supply leads from the
terminal strip mounted at the rear of the board.
b. Remove the two screws holding the interface connector
in place and remove the connector by sliding it to the
right to clear the mounting bracket.
c. Remove the screw which fastens the “IT channel heat
sink at the lower part of the board to the chassis.
d. Slide the board approximately Vi inch rearward to clear
the mounting slot. Then either lift straight up or re­
move the board toward the rear of the unit
c. Grasp the board firmly and remove the 36-position con­
nector from the board.
d. Remove the board toward the rear of the unit to clear
the mounting spaces at the front of the board.
If any unusual problems are encountered in the installation
or operation of the SLO-SYN Translator, contact the factory
or the nearest Superior Electric sales office.
FOR ?4Q V A-C (2Qa/?S4V). 5Q/60Hi OPERATION
R a m o 'i Jum p** M 5 -H ? on TB1
on T B 1
Ana Jum per M 2-M 3 on T9»
F fe 't'O * J u r r p a r K S - H l
FOR 220V A-C (187/242V ). 50/6QH? OPERATION
R « " c v « Jum per H 5 -M 2 on T01
R*»w »« Ju/»»»r M J-H 1 on T B I
A4d Ju>-p*r H 2 - H J on T B I
Moo* W IKS (A ) from m3 to H4 on T B I
R S 2 J 2 IN TE R FA C E
SCHEMATIC DIAGRAM
TM5C0 TRANSLATOR
FIGURE 13
ttl
rtrc R F A c e
v J81:? Jw4icn
rnvr^nvslc21
SCHEMATIC DIAGRAM
MOTOR DRIVE CIRCUIT BOARD
CO
(M?«)
<
f '- <
J ♦ Vnai
SCHEMATIC DIAGRAM
OSCILLATOR/TRANSLATOR CIRCUIT BOARD
-T im )inhibit
33«oi
C ED w
< 2 H D * v * o»
-t J?-» )inhibit
<jM > 0«
_
,
<<o
»'S
IHMMI CWPutSC pM----- ----------- Wv"
+i2v
(t t u
ccw PM.se
tooa
(§>-
mnti *uLr jtcp 0
V
—~
>UI1[ OUT (NS23?t
*U u H OUT (TTLI
t»S«l) UU *p«0 ®
CGnmOi.
jr»e'LiTT i>jlitr.'rn
»T*SuiTy »uL8t( J'-t >
^
t h
e
S U P E H IO B
B I.S C T B IC
c o m
p a n y
H E A D Q U A R T E R S : 383 Middle Street
Bristol, Connecticut 06010
T E L : (203) 582-9561
T E L E X : 9 6 2446
BOSTON
6 Abbott Road
P.O. Box 249
Wellesley Hills, Massachusetts 02181
Tel: {617)237-0750
TW X: 710-383-6797
CH A RLO TTE
5600 Execu tive Center Driye
Charlotte, North Carolina 28212
Teh (704) 535-5846
TW X: 810-621-0491
CH ICA G O
799 Roosevelt Road
Glen Ellyn, Illinois 60137
Tel: (312)858-2960
TW X: 910-651-3250
C LEV ELA N D
124 West Washington Street
Medina, Ohio 44256
Tel: (216)725-8887
Cleveland Enterprise 3761
TW X: 810-437-2682
D A LLA S
Suite 164
2530 Walnut Hill Lane
Dallas, Texas 75229
Tel: (214)350-1368
TW X: 910-861-4383
D E T R O IT
Prudential Building
20320 Greenfield Road
Detroit, Michigan 43237
Tel: (313)967-1011
TW X: 810-232-4880
LO S A N G E L E S
6150 Canoga Avenue
Woodland Hills, California 91387
Tel: (213)999-2150
TWX: 910-494-1910
NEW Y O R K
505 White Plains Road
Tarrytown, New York 10591
Tel: (914)631-8600
TW X: 710 567-1261
P H ILA D ELP H IA
1750 Waiton Road
Whitpain Office Campus
Blue Bail, PA 1S422
Tel: (215)825-9123
TW X: 710-454 0682
Cable Address S U P E L E C
RO CH ESTER
533 West Commercial Street
East Rochester, New York 14445
Tel: (716)381-9210
TW X: 510-254-2890
SAN FR A N C ISC O
1333 Lawrence Expressway
Santa Clara, California 95051
Tel: (408)985-1435
TW X: 910-3334)176
Representatives:
IN IN D IA N A
Marketing Engineers, Inc.
2511 East 48th Street
Suite N3
Indianapolis, Indiana 46205
Tel: (317)546-1523
TW X: 810-341-3239
IN A L A S K A , IDAH O, M ON TAN A, O R EG O N , WASHINGTON
Jas. J. Backer Company
221 West Galer Street
P.O. Box 9327
Seattle, Washington 98119
Tel: (206)285-1300
TW X: 910-444-1646
IN F L O R ID A
Hutto-Hawkins-Peregoy, Inc.
139 Candace Drive
P.O. Box 1277
Maitland, Florida 32751
Tel: (305)831-2474
TW X: 810-853-0256
IN C O LO R A D O , NEW M EX IC O , T E X A S (West). U TA H , WYOMING
William J. Purdy Company
1327 South Inca Street
Denver, Colorado 80223
Tel: (303)777-1411
IN IOWA, KA N SA S, M ISSO U RI, N EB R A S K A , SO U TH ERN ILL IN O IS
Thomas L . Dowell & Associates, Inc.
7810 Foster Street
Overland Park, Kansas 66204
Tel: (913) 648-7373
IN EU RO PE
Superior Electric Nederland B.V.
Koperw®rf 33
2544 EM The Hague, Netherlands
Tel: (070) 679590
T E L E X : 31436 Supenl
Cable: S U P E LE C
IN CAN AD A
The American Superior Electric Company, Ltd.
38 Torlake Crescent
Toronto, Ontario M8Z 1B3
Tel: (416)255-2318
T E L E X : 06-967806
WARRANTY AND LIMITATION OF LIA8ILITY
The Superior Electric Company (the “ Com pany"), Bristol, Connecticut, warrants to the buyer of equipment manufactured
and sold by the Company that such equipment will be free from defects in material and workmanship under normal use and
service for a period of one year from date of shipment from the Company's factory or a warehouse of the Company. T H E
CO M PA N Y'S O B LIG A T IO N U N D ER T H IS W A R R A N T Y S H A L L B E S T R IC T L Y AN D E X C L U S IV E L Y L IM IT E D TO
R E P A IR IN G O R R E P L A C IN G . A T T H E F A C T O R Y O R A S E R V IC E C E N T E R O F T H E CO M PA N Y, A N Y SU CH EQ U IP ­
M E N T O R P A R T S T H E R E O F W HICH AN A U T H O R IZ E D R E P R E S E N T A T IV E O F T H E CO M PAN Y F IN D S TO B E D E F E C ­
T I V E IN M A T E R IA L O R W O RKM AN SH IP U N D ER N O R M A L U SE AN D S E R V IC E W ITH IN SUCH P E R IO D O F ONE
Y E A R . T H E COM PANY R E S E R V E S T H E R IG H T TO S A T IS F Y SUCH O B LIG A T IO N IN F U L L B Y R E F U N D IN G T H E
F U L L P U R C H A S E P R IC E F O R A N Y SU CH D E F E C T IV E EQ U IP M EN T. This warranty does not apply to any equipment
which has been tampered with nr altered in any w ay, which has been improperly installed or which has been subject to misuse,
neglect or accident.
T H E F O R E G O IN G W A R R A N T Y IS IN L IE U O F A N Y O T H E R W A R R A N T IE S . E X P R E S S O R IM P L IE D . IN C LU O IN G ,
W IT H O U T L IM IT A T IO N . A N Y IM P LIED W A R R A N T Y O F M E R C H A N T A B IL IT Y O R F IT N E S S F O R A P A R T IC U L A R
P U R P O S E , and of any other obligations or liabilities on the part of the Company, and no person is authorized to assume for
the Company any other liability, with respect to equipment sold by the Company. The Company shall have no liability with
respect to equipment not of its manufacture. T H E CO M PAN Y S H A L L H A V E NO L I A B I L IT Y W H A T S O E V E R IN A N Y
E V E N T F O R P A Y M EN T O F A N Y IN C ID E N T A L O R C O N S E Q U E N T IA L D A M A G ES. IN C LU O IN G . W ITH O U T L IM IT A ­
T IO N , D A M A G ES F O R IN JU R Y TO A N Y P ER S O N OR P R O P E R T Y .
Written authorization to return any equipment or parts thereof must be obtained from the Company. The Company shall not
be responsible for any transportation charges.
IF
FO R AN Y
R EA SO N A N Y O F T H E F O R E G O IN G P R O V ISIO N S S H A L L B E IN E F F E C T IV E , T H E CO M PA N Y'S
L I A B I L IT Y F O R D A M A G ES A R IS IN C O U T O F IT S M A N U F A C T U R E O R S A L E OF EQ U IP M EN T , O R U SE T H E R E O F .
W H E T H E R SUCH L IA B IL IT Y IS B A S ED ON W A R R A N T Y , C O N T R A C T , N E G L IG E N C E , S T R IC T L I A B I L IT Y IN T O R T
O R O T H E R W IS E ,S H A L L N O T IN A N Y E V E N T E X C E E D T H E F U L L P U R C H A S E P R IC E O F SUCH EQ U IP M EN T.
A ny action against the Company based upon any liability or obligation arising hereunder or under any law applicable to the
Company's sale of equipment, or the use thereof, must be commenced within one year after the cause of such action arises.
t h e
S U IP E IR IO J ?
E lS L .E C 'Z r iR IC
c o m p a n y
Sriutol, Connecticut 0 6 0 1 0
S M 107 S S
MS2105C253
80
Printed in USA
3 .3
S lo -S y n D riv e Motors and Model V a ria tio n s
Two models of S u p e rio r E le c tric S lo -S y n ste p p e r motors a re
used
be
on the
used
F /R M ounts:
with
p re v io u s
th e ir
HS-1500 and M172-FD306 w hich must
associated
p a ra g ra p h .
tra n sla to rs
P h y s ic a lly ,
th ese
as d e scrib e d
motors
a re
in the
e x te rn a lly
identical in s iz e , sh a p e , m ounting, output s h a ft, e t c ., but d iffe r
s lig h tly in the p h y siq u e of motor w inding term ination.
T h e se two S lo -S y n ste p p e r motors a re b ifila r wound and the
d riv e sh a fts rotate 1 .8 ° fo r each change of state of the c u r re n t
in
the
fo u r
alw ays
motor
en erg ized
Two
by the tra n sla to r
and rotating sta te s.
c ir c u it s
w in d in g s.
of
-
the
in
fo u r
w ind ing s
both the stea d y
are
state
T h e w in d in g s a re d riv e n by fo u r sw itch ing
in the tra n sla to rs w hich sw itch on and sin k c u r re n t to
ground
th ro u g h
the w inding ce n te r ta p s.
F ig u re 16 shows the
motor sequential sw itch in g sta te s which ca u se the motor to rotate
in
1 .8 °
sh a ft
increm ents
( i.e .,
ste p s )
for each
state ch a n g e.
T h e re a re about 6 motor ste p s fo r each command bit in the
rotation
a x is and about
1\ motor ste p s fo r each command bit in
the focus a x is .
T h e re
a re
sev era l
im portant
p ro p ertie s of ste p p e r motors
w hich have influenced the d esig n of the F /R System .
T h e f ir s t p ro p e rty is th at the motor sh a ft A0 increm ents are
v e r y a ccu ra te and the e r ro r is noncum ulative.
T h is p ro p e rty is
not a vital requirem ent in the F/R d riv e sin ce the co n tro lle rs are
closed loop system s w hich control on an e r ro r signal and a re not
dependent
would
does
be
upon
req u ired
how ever
commanded
the
ex act
attainm ent
in an open
co n sid e ra b ly
rotation
of
an
nA0
loop c o n tro lle r.
sim plify
the
se rv o
increm ent scheme elim inates
motion which
T h is
desig n
the
p ro p e rty
as
usual
the
co n ­
ce rn for the se rv o sta b ility .
A nother
v e ry
fo rg iv in g
p ro p e rty
is
that
if
the
ste p p e r
motors see a load torque g re a te r than the torq ue w hich th ey can
develop th ey slip m agnetically and a re not damaged by operating
at full
s ta ll.
T h e re have been a num ber of occasions in which
81
F /R
no
d riv e m echanism s have fro zen due to ice b u ild u p s, e tc. and
ste p p e r
motor
has e v e r
been
damaged
in these
co n d itio n s.
T h e motors will slip if th e y a re overloaded with e x c e ssiv e a c c e l­
eration or d eceleration to rq u e s.
Fo r th is reason the F /R Control
u n it s t a r t s mechanism motors at a low step p ing rate (~50 Hz near
the peak of the to rq u e/sp e ed c u r v e ) and lin e a rly a cce le ra te s the
stepping
rate
dim inishes
to ~500 Hz
the
in one seco n d .
step p ing
rate
is
As
the se rv o
to
~50 Hz
red uced
e rro r
(in
one
seco n d ) so th a t the la st half second of motion is at a low rate so
th a t the ste p p e r does not oversh oot when the motor d riv e sig n a ls
stop sw itch in g .
T h is d eceleration also re d u ce s the "wind up" of
the elastom er m o to r-d rive mechanism co u p lin g .
T h e elastom er coupling ten d s to in teg rate the motor v e lo city
im pulses into a smoother A0/At mechanism d r iv e .
Remember that
the motor motion is a seq uence of ste p -lik e d isc re te A0 jum ps for
each
d riv e
sw itch in g
accom plished
and
a re
reason
ch a n g e.
T h e se
in a few ten s of m icroseconds
limited
c u r re n t
state
p rin c ip a lly
sw itch in g
by
ca p ab ilitie s
the
L/R
state
chang es
by the tra n sla to rs
time co n stan t and
of the d r iv e r sw itch e s.
the motor sh a ft ve lo city
are
is a s e rie s
the
For th is
of im pulses at the
step p ing ra te .
A nother v e r y
the
high
ra tin g .
im portant p ro p e rty of th ese ste p p e r motors is
torq ue developed
at low sh a ft rpm fo r a g iven power
If we compare the torq ue developed by the M172-FD306
motor with the torq ue developed by an eq u iva len t power ac motor
(sa y
a 3/4 h o rse ,
ste p p e r
hp/27in.
is
much
T h is
1750 rpm motor) the torq ue d elivered by the
h ig h e r
p ro p e rty
sin ce
the
ac
sig n ific a n tly
motor
torq ue
re d u ce s
the
is :
T =
num ber
of
g e a rs req u ired between the d riv e motor and the load in com par­
ison with the g ear tra in
req uirem ents for a more conventional ac
or dc motor in the same ap p licatio n .
A final
d eve lo p
and
a h ig h
v e ry
im portant
h o ld in g
sw itch ing d riv e is s ta tic .
(i.e.,
p ro p e rty
b r a k in g )
is that the
to rq u e
w hen
ste p p e rs
th e motor
T h is torq ue v ir t u a lly locks the mecha­
82
nism s
in
place and
fa r ex ceed s the b ra k in g torq ue (a t least in
the rotation a x is ) of the e le ctrica l b ra k e s .
T h e H TR -1008/H S-1500 combination p ro v id e s 1500 o u n ce-in ch
holding torq ue and the TM -600/M 172-FD306 combination p ro d u ces
2400 o u n ce-in ch of holding to rq u e .
F ig u re s
17
and
18
d ep ict
the
translato r/m o to r
w irin g
sim plified form.
2
o
C
4-S TE P
STEP
I
Q
O'
e
o
o
S E Q U E N C tM G
sw i
SW3 SW4
ow OFF
ON
OFF
2
3
ONJ
OFF
OFF
CN
CPF
ONl
OFF
OM
4
OFF
ON
ON
OFF
I
CM
OFF
OM
OFF
I
c
u
ui
l s
I
I
5
o
o
M O T O R R O T A TiO sj fs CW
l//£ W £ D
FRO M
FIG. lb-
AS
N A M EPLA TE
SLO-SYN MOTOR S W ITC H IN G
83
SEQUENCE
STATES
in
ped . r?ocM
JOVCT/OAJ Boy.
JUMCT/oN Bax
FOC MOTOR
Jufjcnojo box
B LK
7.2
~C£)-— ^ B U < AI OUTPUT
G R t j, i I M J
/?2 OUTPUT
-Q.~
5.b I . ! WHT CENTER TAP
W HZ
tf7.3
Rev
A3 o u t p u t
p_
BLU
Aj
FOC
M O TO R
j_
output
TB/3
_BLK__n
GQM
At OUTPUT
/A2
f z uOUTPUT
u iru i
^
_
| 1W HT C.ES)7ER T A P
REP
BLU !l
fffi0
I \v?\ I J BUJ
A3 OUTPUT
44 OUTPUT
RoT MOTOtZ
JOAjcr/0/o soy
m otes:
\.REF, NRAO DYJG 980/9/7/, SH Ts 4t St /St *e
LI
& <c
'
\________
!
1nTS)ZA)AL
\
fe e o ©J
0 0 0 0 0 | |
"7-6 1' ‘ !
TBl ~
/
tovAJSCTlQiO
FOC T R A N S L A T O R
HTR ICO&
tmaRuAL
2. APPLICABLE. TO ANTENNAS / THRU 20
)
£00aj£ CT iO*J
rot
translator
htr
tooe>
H T R 1500/100©
AMT * 1 - 2 O
F IG . 1 7 - HTR ISOO/IOO& TRANSLATOR 4 HS/SOO MOTOR,
s im p l if ie d
w ir in g
d ia g r a m
P ED . ROOM
JUNCTION! b o x
BLK
AI
-- 1--- -■ ........ i r A'Z
1
1 i 1 GRM
. I...... .
5,$ 1 . 1 WHT AI/A2 CT 1
6RM
WHT
A1/A2. CT
7,8
RE D
■oy
A3/A4 CT
1
1
9. tO 1,1
BLU
A4
A PEX
JUNCJ1PN_&0X^ TB\*2>
4L
ti, 12-14 I'•
ORG
RED
A3
BLU
M
ORG
I>2 T p
■Qy
Gm
I |1
&
5.6
1 .1
<D-
WMT
R E P 'S *
1
B u r l,
WI09
c v .
"•»h
0R6
WHO
BLK
GRN
WWT
,1
P2Al
P
1,
A2
,1
1,
Al/Al CT | 1
1
REP
A3
.1
9. *3 1 . 1
*
<Zh
BLU
A(
!'
HjJZ
M OTOR
1
SHIELD IJ--A3/A4 C T ,
0
1^WI02
81K
P flC
5H1ELP
ORG A3/A4 CT |
TYfle M m - F D - 3 0 &
TB]4
;,2 W^UI K
At
-O ^ L O B l
U
W103
Wr1
Q) P/O
A1T61
* WI02 4 W/03 CABLE SHIELDS TERMINAT£D 70 "GROUHP BUS" O/M
LIGHTNING SURGB ARRESTOZS /AJ JUNCTION &OX£S.
I-2 !®
a 5-.v
Q>
P/o
A2T6I
FOC XLATOR
^TM 600)
F I G . IB - TM & O O
P3r
8
<25■' ■
-51
®z p /o
A1TB1
7
y*
p/o
A2.T61 ^ *
ROT XLATOR
(T M & o o )
T R A N S LA T O R £ M 1 7 2 -F D
TM 600
ANTENNAS 21 “• ” 28
M O T O R ; SIMPLIFIED w ir in g P/Ag RAM
I
3 .4
B ra k e System
The
b ra k e
system
p ro v id e s a b ra k in g
to rq u e to the d riv e
m echanism s in the in te rv a ls between mechanism motion commands
and when the F /R D riv e System is unpow ered.
The
b ra k e s
a re
m agnetically
a ctivated
"fail
safe"
b ra k e s
w hich means th a t th e b ra k e s u rfa c e s a re engaged when th e y a re
unpow ered and diseng ag ed when power (w ith in the p ro p er o p e r­
ating
ra n g e )
is a p p lie d .
T h e b ra k e s h ave a perm anent magnet
w hich a ttra c ts a movable arm ature w hich is m echanically coupled
to the d riv e
a re
the
w ithin
g e a r t r a in s .
b ra k in g
the
T h e arm ature and magnet pole faces
s u r fa c e s .
An
electrom agnet
perm anent magnet pole s t ru c t u r e
coil
w hich
is
enclosed
when
en er­
gized with th e a p p ro p ria te c u r r e n t and c u r re n t flow p o la rity will
oppose
the
m agnetic field
produced
by
the perm anent m agnet.
S p r in g s fo rce b ra k in g s u rfa c e s a p a rt when the b ra k e is c o rre c tly
p o w ered .
T h e p h y siq u e of th e b ra k e s a re depicted in F ig u re 19.
perm anent
magnet portion
(b a s e )
F/R Mount b y the to rq u e b a r.
of the
b ra k e
is fixed
The
to the
T h e u p p er portion of the b rak e
is the arm ature section w hich is sh aft-co u p led to the d riv e g ea r
tra in so th at when the b ra k e is d iseng ag ed the arm ature section
rotates with mechanism motion.
A v e r y im portant req uirem ent of the b ra k e s is th a t th e y be
p ro p e rly powered - too little or too much c u r re n t will not perm it
a
p ro p er
b ra k e
re le a se .
Each
b ra k e
has a se t-u p
p ro ced u re
w hich determ ines the a p p ro p ria te activation voltage for the b ra k e
w hich a re in the neighborhood of 68 v o lts .
voltage
than
should
±2 v o lts.
not
be
B ra k e
v a rie d
T h e b rak e activation
from the c o rre c t value b y
more
vo ltag es which exceed th is tolerance will
prod uce too much oppositional m agnetic field which can ca u se the
b ra k e su rfa c e s to reen g ag e.
B ra k e d c power is provid ed by a b ra k e co n tro ller w hich is
depicted
in
F ig u re
19.
term inal s t r ip s is show n.
The
p h y siq u e
of
the
co n tro ller
and
T h e jum pers must be installed p e r the
86
notes on th is fig u r e .
T h e co n tro lle r has tem perature com pensa­
tion fe a tu re s to p ro vid e a co n sta n t b ra k e c u r r e n t o v e r tem pera­
tu re v a ria tio n s.
the
T h is fe a tu re is p ro b ab ly in e ffe ctiv e b ecause of
d iffe re n t environm ent seen
b y the
b ra k e s
and
c o n tro lle rs;
the b ra k e s a re u n covered and exposed to r a in , snow , d u s t, and
ru st
build up w hile the c o n tro lle rs a re in the more benign e n v i­
ronment of th e pedestal room.
F ig u re 20 d e p icts
(th e re
a re
the b ra k e co n tro lle r e le ctrica l
no m anuals) and
F ig u re 21 is a sim plified schem atic
diagram of th e b ra k e c ir c u it r y
gized
by
ap p lyin g
ca b lin g .
T h e b ra k e s a re e n e r ­
ac power to the b ra k e co n tro lle r via a solid
state re la y in the M8 module.
M8 r e la y .
schem atic
T h e F /R
Control u n it d riv e s the
T h e p re se n ce of b ra k e voltage of the c o rre c t p o la rity
on the apex junctio n box b ra k e term inals is sen sed by the F/R
C ontrol
u n it which
voltage
is
not p re se n t with
detection
b ra k e
in h ib its tra n sla to r d riv e clo ck s if the b ra k e
th resh o ld
activation
the c o rre c t p o la rity and above the
(~30 v o lt s ) .
(s u c h
as
a
A more p o sitive
motion
d e sira b le but p ro b ab ly e x p e n siv e .
w hich
b ra k e s
have
failed
to
sen sin g
indication
sw itch )
would
of
be
T h e re have been o ccasio n s in
a ctiv a te
even
though
c o rre c tly
pow ered .
B ra k e
B ra k e
activatio n
and
release
dc re sista n c e is 425 ohm s.
times
a re
~200 m illiseco n d s.
T h e ac power demand of the
b ra k e co n tro lle rs a re le ss than 1 amp, (M8 has a 1-b amp fu se for
the co n tro lle r ac p o w e r).
The
b ra k e
co n tro lle r and
b ra k e s
a re m anufactured b y the
W arner E le c tric B ra k e and C lu tch Com pany of B elo it, W isconsin.
The
b ra k e s
a re models FB -650 and FB -475 fail safe b ra k e s and
the co n tro ller is a model M CS-805 b ra k e c o n tro lle r.
It has
may
vo lts
re ce n tly
o scillate
P -P )
w hich
been
d isco ve red th at the b rak e co n tro lle rs
superim pose a high
on the co n tro ller d c o u tp u t.
noise
level
(~10 to 15
While th is
noise does
not affect b ra k e operation it does c ro s s ta lk into the readout pot
lines in the junctio n boxes w hich ca u se s the F /R Control u n it to
m alfunction by prem ature command term ination.
87
To c o rre c t th is
problem a 0.1 pf 100 vo lt ca p acito r should
be in stalled a c ro ss R6 in the b ra k e co n tro lle r.
5 watt w ire wound
and
R6 is a 3 k ohm,
re s is to r mounted on the co n tro lle r d c board
may be id entified b y the "R6" re fe re n ce d esig n ato r p rin ted
on the b o ard .
Both
co n tro lle rs
in
antenna
18 and 19 had se v e re 200-kHz
o scillatio n s (~10 V P - P ) in the d c output w hich caused the F/R
Control u n it to fail due to c r o s s ta lk in the pot lin e s.
C o n tro lle r
d c o u tp u ts should be ch ecked fo r th is o scilla to ry condition if the
F / R co n tro lle r e x h ib its e r ra t ic b e h a v io r.
88
ARM ATURE
S E C T IO N
APEX FR A M E
/— //OVAC /N —1
1
,_____ L
rTO B R A K E J M P R
I +
|
C
GAID
4
+
TBl
D E T A IL
A/OTes.
/. JM P R 8£TW6EM
773/ -/, 2
3-4
120 \JAC OP&RAT
TBI
2 .
M O TE d
JM P R -C -
t b i -~ 7 ,n
B £ T u ;G £ A J
fo r
r& m o T €
OPFRAHO/O AAiO M psr
CIRCUIT
BOARC
Be JMSTAU.SO pee.
TH e
F/R
APPLICATION*
© C A P A C IT O R MAV Be
REQ'O T O E L l M I M A T t
Po w e r s o p p l v
O S c lL L A T « 0 (\K
SEE T E X T .
TRAMS FORMER
C ri)
FIG. 19-
BRAKE
4
CONTROLLER, PHYSICAL
89
DESC RIPTIO N
T&1
N O TBS
A
LtN K FOR
VLA INSTALLATION
/. THIS D\NG. /S PROPRIETARY TO WARNER
ELECTRIC BRAKE $ CLUTCH CO. PEDRAWaJ
By PERMISSIdN F or AiAIaJT£A)An Ci£ USE
&V MR AO OAJCV.
2 . C to jc ADDED IN SOM E U N ITS B y AUZA6.
V A Lu e - O .ip F g & v i o o w c
3. Pr o m f a r m e r
oing
* G o so & 2 7 - o o s
4 . FOR /20VAC OPERATION //JPOT A c To
T 8 1 - / AMD 4 ' JUMPER* T R t - / +2. AaJD T&t-3*
OUTPUT AD JUSTED FOR PROPER B R A K E
OPERATION , +6e\/ NOAMAJAL.
BRA KG
O U TP U T
0AJ c h a s s i s
fo r.
h& at
S/AMC
Ql - 2N4I23
QZ - 2MSSS0
Q3 - 2H3440
jS
P.C< BoARP
Q 4 - 2 A j 34 4 0
CjOAJAJECT/Oa/
P.C• 30A R D
note
FIG. 2 0 -
M C S - 8 0 S - / BRAKE CO N TR O LLER 7 S C ^ E M A T / C D I A G R A M
/W7 F/R
Co n t r o l
FOC 3 R K
ACTl\'£7£
ROT B R K
Activate
I. REF. N R AO I>WG 9 8 P I9 1 7 I , SUTs 3, 13, FT
M& PIR
PViR SUPPLY
FIG. 21
-
BRAKE. 4 BRAKE.
CONTROLLER, s i m p li f ie d
w irin g
d ia g ra m
3 .5
Readout Potentiom eters
The
readout
rotation
potentiom eters
a re
d riv e n
by
the fo cu s
and
d riv e m echanism s and p ro vid e an analog readout of the
mechanism position in term s of a voltage w hich v a rie s between 0
and -10 v o lts .
w inding
T h e se potentiom eters a re co n stru cte d by lin e a rly
re sista n c e
then
formed
c a se .
The
into
w ire
a
around
helix
and
an
in su lated
in se rte d
w iper co n ta ct/h e lix
mandrel w hich
into
follower can
the
is
potentiometer
tra v e rse
ten
sh a ft
t u r n s to p ro vid e an a ccu ra te high resolution analog of the in p u t
sh a ft p osition.
T h e se u n its a re a special o rd e r u n it with the b est lin e a rity
realizab le
The
in
the
re sista n c e
7600
s e rie s
-
±.015%,
ind epend ent
lin e a rity .
is 20,000 ohms ±1% and th e re a re approxim ately
11,300 t u rn s of re sista n c e w ire on the mandrel so th at the sm all­
e st
(th e o re tic a l)
realiza b le
readout
m illivo lts.
The
F /R
Control
u n it
s ta te s)
th a t
one
command
b it
so
re sista n c e
u n its
on
the
pot.
DAC
is
is
se rio u s
ohms
a 12-bit u n it
co rre sp o n d s
One
1 .7
or
.9
(4096
to ~2^ t u rn s of
problem
with
these
is th at the w iper contact fo rce is small and the pots f r e ­
q u e n tly
fo u r
w ire
chang e
become n o isy
o b se rv in g
band
and
have e r ra t ic output - u su a lly at the
p o sitio n s.
When
th is
problem a ris e s
the
pots must be replaced as n o isy o r e r ra t ic readouts cau se fa u lty
operation of the F /R S y ste m .
A ntenna vib ratio n is p ro b ab ly the
ca u se of sh o rt potentiom eter life .
The
be d riv e n
pot has 3600° of ele ctrica l readout but the sh a ft may
another 90° on e ith e r end
en co u n tered .
Voltage
before the
readout past 3600° end
pot stops a re
tap s
is co n stan t
and m eaning less.
The
pots
have a re sista n c e
tem perature co efficien t of ±20
p p m /°C .
See the A ssociated potentiom eter data sheet for more d etails
on th ese u n its .
F ig u re 22 d ep icts the c ir c u it r y of the position readout pots
in the sim plified schem atic form .
92
PSD. ROOM
JUKICT/OAJ BOX
r
APELX
JUNCTION BOX
<$J3~20S--!0V
V
0
N
M
Y
PO T
£ X C !T
aa;
z
bb!
V
TB3-7,0
YUa/
\j
u - BLK
M BLU
BLK
M-
783-5,61
— (2)—
jj- /
-to
r
^ lE O C P pr rd q ut
L PED
K K BLK_
14 I
—
< ® J3-2I
DD
FF
//,
-a*
TB®5,6
r ----c^~~
TBhf9,W—
-Q- U ---- Q?)**—
TQt-rrje
0RC,-8iX I
T
V
TB2-
1
£E
M7 F /R
j CONTROL
s
Noras
CC
1
t
TB2'/S,/6
R
4h
702-/2, M
i///? i *
blu
------------ —
q
~—-(£>—
T8;- |
3,4ylRQT POT RDQUT <3*w-wT|
Zed
R 6
A A Bl k
I /''2
----Q*j---•
m
VIW-WHP
J
\W1J2
T
CCW CW
CCW CW
ROT
s
FOC
9
R EA D O U T
P O T £ \)T /O M E T £ R S
5
T 0 / - 3 .4
e>
<&-
A
— 6-
C
w
.tat# •-r •—
^
■RACK-C.
B/aI-W
OCW
NO TL6:
/. /?££“ A//P/40
9B D /9/7I, S U T ’s 3 ,1 3
U WH£N US/MO M 7 T £ ST PO/aJTS, A LW A YS U s £
AS GfiOOAjD R £ F £ R E N C £ t AJoT C H A S S / S
J 3 -37
(SROOMD .
3 00 NOT M 0 N \T C R J 3 - I ANO J 3 '2 CURIN G CO M M A N D
e y e .c u t / o a j a s
w, l o a d i n g h u f l u b n c b s l o o p
OP£RAT/CN* LOADING MAy CAUSE RBADOUT SRRO/3S .
F IG . 2 2 - READOUT PO T S N T /O M E T E R S , SIMPLIFIED HjlRirtG
DIAGRAM
A-34
7 6 0 0 S e rie s
1-13/16" Diam eter
10-Turn
W irewound
This 10-turn precision pot, with one-piece m olded
plastic housing, has a range of total resistance from
100 ohms to 650,000 ohm s and standard independent
linearity of ± 0 .1 5 % . Full use of the potentiometer's
total resistance range is possible since the unit has a
90° overtravel at each end. As many as 28 taps can
be added during manufacture. In addition, special
versions are available for operation to 1 2 5°C .
C h a ra cte ristics of Typ ical L in e a r Coils
Total
R esistance
(ohm s)
100
Models: 7601 bushing mount with sleeve bearing; 7603 servo
mount with ball bearing.
Matching Turns-Counting Dial: Series RB (see page A-43)
Series 900 & 200 (see page A-44)
Model 205 (see page A-45)
500
1 , 000 *
2,000
5,000°
10 , 000 °
20 , 000 °
S P E C IFIC A T IO N S
E le ctrical
30,000°
50,000°
75,000
100 ,000 °
150,000
Standard resistan ce range, ohm s (see note) ....................... 100 to 650,000
Standard resistan ce to le ra n c e ................................................................................. ± 5 %
Min. p ractical resistan ce tolerance ....................................................... ; ____ ± 1 %
Independent lin e a r it y .............................................................................................. ± 0 .1 5 %
Min. p ractical Independent lin e arity* ................................... < 5 0 0 0 ; ± 0 .1 0 %
500 to 4,9 9 9 2 ; ± 0 .0 5 %
5K to 19,9990; ± 0 .0 2 5 %
> 20KO ; ± 0 .0 1 5 %
Power rating, w atts ...................................5.0 at 4 0 °C , derating to 0 at 8 5 °C
Input voltage, m ax.................................................................................................. 1,000V DC
D ielectric strength .......................................................................................... 1,000V RMS
Insu lation re sistan ce (at 500V DC) ..................................................... 1,000 megO
Noise, m ax................................................................................................................................ 1000
Actual ele ctrical travel .............................................. < 3 0 0 0 = 3 ,6 0 0 ° (+ 3 ° / —0 °)
300 to 2 ,50 00 = 3,6 00 ° ( + 2 ° / - 0 ° )
> 2 ,5 0 0 0 = 3 ,6 0 0 ° ( + l ° / - 0 ° )
(9 0 ’ nom. ele ctrical overtravel each end.)
200,000
W ire Tu rn s
± 5%
Min. R esistance
Increm ents
(ohm s)
Wire Tem pco
(p p m /°C )
2,500
4,252
5,397
7,072
8,794
8,396
11,329
12,366
13,543
16,094
16,477
19,688
20,377
21,739
23,569
24,213
25,041
25,076
0.040
0.118
0.185
0.283
0.569
1.19
1.77
2.43
3.69
4.66
6.07
7.62
9.82
11.5
14.9
16.5
24.0
25.9
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
±20
250,000
350,000
400,000
600,000
650,000
°Stan d ard re sistan ce valu es availab le without setup charge.
Environm ental
Am bient tem perature range, °C .................................................................. —65 to 85
Tem perature cyclin g ................................................................... MIL-R-12934, 4.6.18
Rotational load l i f e .....................................................MIL-R-12934, 4.6.20, C h ar. 9
Low tem perature o p e ra tio n .....................................................MIL-R-12934, 4.6.21
Low tem perature exposure ..................................................... MIL-R-12934 4.6.22
High tem perature exposure ................................................... MIL-R-12934,’ 4.6.23
Shock (100 G ’s) ................................................................................ MIL-R-12934, 4.6.24
Vibration .............................................................................................. 5 G 's, 10 to 2,000 Hz
S a lt sp ray (7603 only) ................................................................ MIL-R-12934, 4.6.26
M oisture resistan ce ....................................................................... MIL-R-12934, 4.6.28
D ielectric strength (red. pressure) .............................. MIL-R-12934, 4.6.13.2
Fungus resistan ce ....................................... U tilizes all non-nutrient m aterials
Sand and d ust ....................... M IL-STD-202, Method 110, Test Condition A
“ Values 0 .02 % and below m ay require external padding.
Note: Extended re sistan ce range up to 1.5 megO availab le on special
order.
M echanical
Num ber of tu rns ....................................................................................................................... 10
R esistan ce elem ent length, approx............................................................................. 4 5 "
Total m echanical travel .............................................................................. 3 ,780° ± 5 °
(3,600° ± 1 ° a v a il, as spec.)
Sh aft runout, m ax. T .I.R ......................................................................................... 0.0005"
Pilot diam eter runout, m ax. T .I.R ..................................................................... 0.0001"
Lateral runout, m ax. T .I.R .......................................................................................0.0015"
Sh aft end play, m ax....................................................................................................... 0.005"
Sh aft radial play, m ax.............................................. 7 60 1= 0.00 2"; 7603= 0.001"
Startin g torque, m ax., oz-in., single c u p .............................................................. 1.3
each added cup ................................................................................................................... 1.3
Running torque, m ax., oz-in., single c u p .............................................................. 0.9
each added cup ................................................................................................................... 0.9
N u m b e r of c u p s , m a x ............................................................................................................ 2
Weight, single cup. oz........................................................................................................... 5.5
Moment of in ertia, gm . c m .2 ............................................................................................ 14
S tatic stop strength, oz-in., m ax..................................................................................600
Life expectance, sh aft revolutions ............................................................ 2,000,000
94
3 .6
Limit S w itch es
The
d riv e n
limit
n ea r
sw itch es
e ith e r
end
se n se
of
th a t
the
m echanism s
w orking
co n tro lle r to in h ib it f u rt h e r d riv e
the limits is not in h ib ite d .
the
rang e
and
into the lim it.
have
been
ca u se
the
D riv e out of
Fo r exam ple, if fo cu s w ere d riv e n to
the u p p er-lim it co n d itio n , the d riv e UP logic would be in h ib ite d ,
h o w ever, d riv e DOWN logic could still be a ctiv a te d .
T h is allows
the su b re fle cto r to be d riv e n out of the limit condition to re sto re
normal o p eratio n.
T h e limit sw itch es a re D P S T p u sh -a ctu ate d sw itch es mount­
ed on the F / R Mount as shown in F ig u re s 23, 24 and 25.
They
a re operated as norm ally off sw itc h e s, closing to ind icate a limit
cond ition.
B ecau se th ese
sw itch es
d riv e the F /R co n tro lle r lo g ic, the
sw itch es are powered b y an isolated +5 V d c su p p ly to p re v e n t
gro und
log ic.
loops
T h is
F ig u re
and
induced
noise
from
contam inating
IS O L +5 V o rig in a te s in the M8 F /R
26 is
a functional
diagram of the
the d riv e
power s u p p ly .
limit sw itch
c ir ­
c u it r y .
The
read
out
sta tu s of th ese fo u r limit sw itch es a re also co n sta n tly
as
a
b in a ry
monitor
data
word
to inform
operator th at a limit condition has o c c u rre d .
to rs
the a r r a y
Fo u r LE D in d ica ­
on the M8 power su p p ly also co n sta n tly d isp la y the sta tu s
of the limit sw itch es fo r local in d icatio n .
No absolute a c c u ra c y of the activation points of the sw itc h ­
es are
sp e c ifie d ,
h o w ever, the limit sw itch es a re adjusted su ch
th at th e y are activated about 0 .2 5 in before the m echanical stops
are en co u n tered .
The
checked
operation
and
adjustm ent
of
the
limit
sw itch es
are
in the p ro ce ss of installation and ch ecko u t of the F/R
System before the antennas a re put into s e r v ic e .
95
MOT D R A W N 10 6Cfi I X .
TOR RLrERLMCL
ONLY,
Component Identification:
1 Focus Ring drive gears and protective "boot."
2 Guide rods
3 Electrical conduit
4 Limit Switch: FOCUS UPPER LIMIT
5 Limit switch plunger boot
6 Limit switch plunger
7 Limit switch actuator bolt: UPPER LIMIT
8 Actuator bolt bracket and adjustment nuts
9 Limit switch actuator bolt; LOWER LIMIT
10 Limit switch: FOCUS LOWER LIMIT
FIG. 23 ~ FOCUS U M I / SWITCHES^ PHYSICAL APRA Ai GE ME AST
96
F I G . 24 -
r o t a t io n
l im it
s w it c h e s
97
t Ph y s i c a l
a rra n g em en t
WEATHER BOOT
PLUNGER
ACTUATOR B O LT
A D JU STM EN T
BO LTS
d ) PRO PER AOJUSTM£AlT
FOR A L IG N M E N T
C) FOCUS MECHA/J/CAL-ELECTRICAL
F IG . 25 -
fe) IM PRO PER A LIGN M EN T
RELATIONSHIP
FOCUS L I M I T CLEARANCE. A D J U S T M E N T S ,
PBD ROOM
JUNCTION BO)t
A PEX
JUNCTION BOX
\m 7 F/R
FOC
tO A J T R O L
r
| 13, H
BLK
-
F
F
V
-
£
J
T&l -
’
ie,/6
— -(£>-
E
r—
FO C UPPER L IM IT
-
R
R
LOWJBR L I M I T
BRU-WHT
-
P
P
Vy
B R N
J
logic
L
G
£
T
£
-
Y
-
Z
rot
8
ccw
R M
c
GRV- BikT
l im it
/s o l + s v
N
o
t
I S o l “+5V 'C O M
Y
J
-------------- 0
T
8 3 ^ 3
~
Z
>
1
- o
o
-
' o
-
t 'O
-
' T
|
---- ----------------------- O
, 4
TBI - 9,10
U
iM
T*6«A
J-Y
6t
T
I
/ 6
TB3-I.Q.
REb-BRN
~
BLK
1
S
Ror cw^ Lim it
,
<£—
G
1,2.
~ < 6
- c
T e i~ m
T&3-
JdLK_
T 8 1 -13,14
F
I
i W
SWITCHES
i
R
b
r
SWITCHES
O
M
h / v /
[^9L
■f5V/
/sg>^ * 5 ^
26
27
WHT-ViM
p
CCW
K>------ A/W
24
y - f f v '
LOGIC
•cw
-----AlVr^
M T-CRG
2 3
L
HJHT- 6RN
2 1
WHT-giK
/ s
NOT
US£P
N .C.
N.Q.
L
-A A /V -h i
H O
...
Kh------W /—1
l im it
L
0
20
INOiCATORS
L,
I/Vi J2
R
A
C
K
-
C
S
/ A
M
B
/ -
I V
F
/ R
P
V
J R
S
U
P
P
L
Y
COM
M-C^
i@l i©i la)
M0TE.S
/. c e r . a ira o
N.O.
0M3 il‘)& D i9 n i, Shirk 3 , 1 3
FIG. 2G - L IM IT SW ITCH ESt SIM PLIFIED
W/RIA/O DIAG RAM
UPPER l i m i t
LOWER LIM IT
CW LIMIT
CCIV LIMiT
3 .7
F / R Contro l U n it (M7)
The
been
operatio ns
im plicit
in
perform ed
by
the
F /R
th e p re v io u s d is c u s s io n ,
C ontro l
u n it
have
in
p a ra ­
p a rtic u la r ly
g ra p h s 2 .4 , 2 .5 and 2 .6 , so the d e scrip tio n in th is p a ra g ra p h is
v e r y b r ie f.
Fo r a more e x te n siv e d iscu ssio n of the c ir c u it r y and
th e o ry of operation
the
re a d e r is re fe rre d to Section C of th is
m anual.
T h e F /R
m onitoring
id entical
closed
and
Control u n it is the n e x u s of all control and sig n al
action
in
c o n tro lle rs
the
F /R
w hich
S y ste m .
perform
logic and analog
u n it co ntains two
ind epend ent
loop control of the fo cu s and
also co n tain s
T h is
a sy n ch ro n o u s
rotation d riv e m echanism s
c ir c u it r y
w hich
monitor the
system analog levels and d isc re te s ta te s.
F ig u re 27 d e p icts the block s t r u c t u r e of th e
u n it in
sim plified form .
F /R
Control
O n ly the common and fo cu s b lo cks are
sho w n, rotation c ir c u it r y is id entical to fo cu s.
T h e position commands a re s e r ia lly loaded into the co n tro lle r
b y Data S e t 3 and stored in a 12-b it sto rag e r e g is t e r .
command
The
is
stored
the command execution
b ra k e co n tro lle r
is
is sta rte d .
powered via the re la y in M8 and a 300
m illisecond d elay is in itia te d .
the
seq uence
When the
A t th e end of the d elay (to perm it
b ra k e to d ise n g a g e ) th e co n tro lle r b eg in s to emit tra n sla to r
d riv e p u lse s to null the e r r o r .
T h e d irectio n of d riv e is d e te r­
mined b y the analog and e r r o r d etecto r c ir c u it r y .
F ig u re 28 d e p icts the co n tro lle r analog and e r r o r d etecto r
c ir c u it r y
in
sim plified
form .
A
pot
b u ffe r
am plifier p re v e n ts
loading of the position readout pot and p ro v id e s c u r re n t fo r the
e r r o r d etecto r and data readout b u ffe r.
bounded
and
summing am plifier with
sums c u r re n t s
cap acito r
fo r
makes
noise
compare
g litch
the
from the
th is
e r ro r
DAC
am plifier
to le ra n ce .
d etecto r
high
T h e e r r o r d etecto r is a
gain
n ear the e r r o r
and pot b u ffe r.
null
A feed b ack
a sho rt-tim e co n stan t in te g ra to r
Two
output
p recisio n
with
e rro r
re fe re n ce
com parators
vo ltag es
determ ine d irectio n ste e rin g for the output d riv e log ic.
100
to
T h e two
re fe re n ce
sig nal
vo ltag es
d im inishes
d efine
into
a
th is
re se t
a p e rtu re .
a p e rtu re
the
When
the
e rro r
command execution
is
term inated by logic (n o t sho w n) w hich se n se s th is sta te .
T h e tra n sla to r d riv e p u lse s a re perm itted to be output only
if the b ra k e voltage is sen sed in the apex ju n ctio n box and a re
se le c tiv e ly
inhib ited
by
th e
limit
sw itch e s
if
e ith e r
sw itch
is
a ctiv a te d .
T h e se o peratio ns a re perform ed b y th e co n tro l/in h ib it
in te rfa ce logic.
When
a
position
command
is
initiated
the
accelera tio n /
d eceleration logic is in itia lize d and th e command clo ck s a re se t to
a rate of ~55 H z.
If th e commanded motion rang e is larg e the
command clo ck s a re a ccelerated to 500 Hz in one second so th a t
the m ajority of mechanism d riv e is done at th e high sp e e d .
As
the e r r o r b eg in s to dim inish th e command clo ck s a re d ecreased to
55 Hz in one second
so th a t th e final
h a lf second
of d riv e
is
done at the low ra te .
A
tim e-out
seq u en ce
is
tim er
in itia te d .
is
sta rte d
when
a
command
If
the commanded motion has
execution
not been
attained w ithin ~150 second s the command state in the co n tro lle r
is re se t and a fa u lt b it is se t fo r readout to the com puter b y the
b in a ry monitor readout logic.
T h e b in a ry monitor readout logic is activated by Data S e t 3
and se n se s d isc re te sta te s in the F / R S y stem .
Analog
m u ltip lexers
u n d e r control of Data S et 3 read out
im portant analog param eters fo r co n v e rsio n .
101
maajual control
BRAKE EMA8L£
SUilTCH /A)PUTS
JLJt
posmoA)
STEER UP/DOvOst
READOUT
POT'S
CONTROL/
IM H /eiT
m a io Q
ERROR StGMAL
CIRCUITRY
(f o c u s )
POStTIOAj
POT
M
GYcrrAT/ofij
INTERFACE
STOP DR\ME
POS POT- DAC
11
S
CMD STATE
(n
STROBE PROM
VATA & r 3
Clocks
r
r -1
I COMMAND
1 LOAD/MG
' STORAGE
fiC C E L /
CO/JTROL
4
[ LOGIC
VRNE POIa/aJ
VRlVS
)
if
Co m m a a JP .
/a jp o t Uj OROj
CLOCKS A vo
DRM E UP'
fumAutt
AAJD
SBQOBMCB
LO G IC
-
L
/
Cir c u it /^ j
__________ 1
\
STROBE (START CMD)
B R A K E Go/OTRCC
T 1 M E -0 O T
LOGIC
RESET
( TIM E OUT FA U LT )
AMAUG PARAMETERS
1!G CU4AJAIEL
;
: f i !
AMALOG DATA
ANALOG
m u l t ip l e x e r
SET 3
BIAJARS
AIOAJITOI?
REtiDOOT LOGIC
!
1) P ot Co n t r o ller
BlHARi DATA
----------------------
J
t
S v s t e a a Di s c r e t e
NoreS'
Td
DATA
sta tes
o m itted for
st/upua ry
2 ) POT AND P6C COAiTROLLERS ARB fVAJCTICAJALLy
FIG-Zl
~ SIM PLIFIED
ID E N T IC A L .
P/R CONTROL UAJlT BLOCK
102
DIAGRAM
~ q \ OFFSET
+ fOV ------ A--'VVV-------e— • AA f\r
POSITION DATA
REA D O U T
CTO DATA S E T 3 )
-ic\j p er
exeir
z -S T E E R UP
103
And
\Gajd V
i____
POS/T/£>aJ KGAOOOT
Pot (A t A r e * )
>• STEER DOWN
/2 BiT &OMMAU0 STATE
(< B IT ~S*<v )
<r
Tvl
F/G. 2 8
S im p lifie d s c h e m a t ic , a n a lo g
c ir c u itr y 4 e r r o r
d e te c to r
3 .8
F / R Power S u p p ly (M8)
The
the
F/R
b ra k e
control
F/R
power su p p ly
e le c tro n ic s,
c o n tro lle rs
of th e
e le ctro n ics a re
the system
solid
and
F/R
a
co n tain s the d c power su p p lie s fo r
state
re la y s
to sw itch
co n tro l/d isp la y
S y ste m .
F /R
located on th e fro n t panel fo r co n v en ien ce.
All
sw itch ed
ac power fu se s
local manual
fo r the
ac power is
The
panel fo r
power to the
on th is
p an el.
Section
th is manual has a more complete d e scrip tio n of th is u n it.
104
D of
3 .9
Ju n ctio n B oxes and S ig n a ls of In te re st
Tw o
c a b le s.
junctio n
The
boxes
pedestal
a re
the
term inus
room ju n ctio n
box
wall ju s t in sid e the d o o r, see F ig u re 3.
fo r all
is
F /R
System
located on th e left
T h e apex junctio n box
is attached to F / R d riv e assem b ly - see F ig u re 7.
F ig u re s 29 and 30 d ep ict the p h y siq u e of the two boxes and
the term inal s t rip co n fig u ra tio n s.
G as tube
the
junctio n
induced
in
su rg e
box
the
a r r e s t e r s a re in stalled on each term inal in
to b y p a ss to gro und
pedestal
room /junction
s t r ik e s on the apex s t r u c t u r e .
~230 vo lts and
tio n s.
can
e n e rg y w hich
box cab les
by
m ight be
lig htning
T h e se su rg e a r r e s t e r s ig nite at
co nd uct up to 20,000 amps fo r sh o rt d u ra ­
T h e su rg e a r r e s t e r s m ust be e ffe ctiv e as none of th e F/R
e le ctro n ics
h as
ever
been
damaged
by
lig htning
s trik in g
the
antenna a p e x e s.
T h e ju n ctio n
fo r
the sy ste m .
boxes a re
The
v e ry
functio nal
co n ven ien t sig nal te st points
schem atics
in
F ig u re s
14,
15,
17, 18, 21, 22, and 26 show th e term inals and signal c h a ra c te r.
D raw ing 98D19171, sh e et 2 , (p ag e 24) show s the cable c o n fig u ra ­
tio n .
An
im portant ch e ck on motor w irin g is the loop re sista n c e
between the motor lin es as m easured in th e pedestal room ju n c ­
tion
b ox.
T h e w in d in g -to -w in d in g
re sista n c e
is ~1.2 ohms and
the w in d in g -to -ce n te r tap re sista n c e is ~ .6 ohm s.
105
REFER NRAo D\tJG * ? Q D I 9 I 4 0
F IG . 2 9 • A P E X
JU N C T IO N
BOX, PuvsicAL
d e s c r ip t io n
DETAIL A
¥.
1!
i
: J
I
i
!
GRCUMOIMG
eus
o
1I f l i
J
$
<—
-t
H
: -I
Wi $
? ; Si
_!
u
|-
IP, vD
<D <C f0
ifK
U _ L
1
GAS TUBE SURGE
A R R E S T O ^ s f T Y P .)
(S E E T E X T )
R S P E R N R A O DW G
#9eDi$l42.
Access cove#
(OPGN&D)
FIG .'SO - PEDESTAL (ZM. JUAJCT/OAJ BOX, PHYSICAL OESC&IPT/ON
106
SJLGNALITE
DIVISION
General Instrument Corporation
1933 Heck Avenue
ptune, New Jersey 07753
BJECT:
1.0
DATE:
8/1/74
Rev. 3
Tentative Specification PMT(275)/UMT(275)-V Surge Arrestor
Features
Protection - Operates
rising voltages associated
induced transients. Pulse
rated dc breakdown voltage
800kv per microsecond.
m nanoseconds when subjected to extremely fast
with lightning and EMP (Electro-magnetic pulse)
breakdown voltage is typically within 25% of the
even for pulse voltages rising at the rate of
High Peak Current - Safely conducts transient currents up to 20ka returning to
normal in microseconds.
Low Capacitance - Typical capacitance of 3 picofarads provides minimum loading
of
C lo n al
1in c c
°
jfcj-gh Resistance - Appears as an open circuit across signal lines. Extremely
high resistance of greafer than 10 thousand megohms prevents current drain.
Free - Inherently noise free thus eliminating noise condition associated
with other types of protective devices.
Life - Retains its breakdown voltage characteristics after thousands of
operations, even after repeated lightning surges.
Potential - High extinguishing potential of 160 volts minimum
assures the surge arrestor of returning to normal after a current surge even
when protecting signal lines containing high voltage.
s^ruction ~
miniaturized metal-ceramic assembly.
lasting protection in most environmental conditions.
1.1
Description
acting surge arrestor which protects components against
gard to rate of voltage rise.
1.2
Outline
Nickel plated for
SIGNALITE DIVISION
General Instrument Corporation
1933 Heck Avenue
'ptune, N.J. 07753
oJBJECT:
1.4
DATE:
8/1/74
Rev, 3
Tentative Specification PMT(275)/UMT(275)-V Surge Arrestor
Ratings
Electrical
DC Breakdown, E z, (tr=50-100v/sec)
Voltage Range Available
PMT (275)................. 350 - 500Vdc±10%
UMT(275)................. 550 - 2500Vdc±10%
Pulse Breakdown, e2 , (tr=5kv/us)
PMT (275)................. 700v (max)
UMT(275)................. Nominal DC +25%
Insulation Resistance.................. 1010ohms (min)
Capacitance............................ 4. OpF (max)
Surge Current Capacity,6/20us pulse.... 20ka
Surge Life, 1000a(6/2Q)us.............. 5000 discharges (min)
Holdover Voltage...... ................. 160Vdc(max)
Environmental
Operating Temperature.................. .................. -55°C to +125°C
Temperature Cycling (MIL-STD-202,Method 102A, Cond. C)___ -65°C to +125°C
Humidity (MIL-STD-202, Method 103B, Cond. B ) ............. 95% Rel. Humidity
Vibration (MIL-STD-202, Method 204B, Cond. C)............ 10-55HZ .06DA
Shock (MIL-STD-202, Method 213A, Cond. C)..... ........... lOOg’s
Thermal Shock (MIL-STD-202, Method 107, Cond. B ) ......... -65°C to +125°C
Barometric Pressure (MIL-STD-202, Method-105C, Cond.B)___ 50,000ft.
1.5
Definitions
Arc Voltage - Voltage across the surge arrestor terminals during conduction of
arc currents. Also known as tube drop.
Breakdown DC - Voltage at which the surge arrestor ionizes when subjected to a
slowly rising DC voltage (dv/dt * lOOV/s).
Breakdown Pulse - Voltage at which the surge arrestor ionizes when subjected to
a fast rising voltage such as (dv/dt = 5kV/us). Also known as surge striking
voltage.
Follow—on Current — The follow—on current caused by the normal operating volt3 £e
in AC applications, which flows fron the moment the surge arrestor is ignited
until it extinguishes, must be linited to the specified value to assure that it
will extinguish at the next zero crossing of the AC voltage.
Holdover Voltage (DC) - The maximum dc voltage which a surge arrestor can with­
stand and extinguish completely within a given period of time after a specified
surge current has passed
through the device.
IPfulati°n Re£istance - The resistance between the electrodes of a surge arrestor
which is not ionized. The measurement is commonly made at 100 volts.
108
SIGNALITE DIVISION
General Instrument Corporation
1933 Heck Avenue
^ptune, N.J. 07753
SUBJECT:
1.5
DATE:
8/1/7A
Rev. 3
Tentative Specification PMT(275)/UMT(275)-V Sur*»e Arrestor
Definitions Conft.
Interelectrode Capacitance - That capacitance between one electrode of a surge
arrestor and another electrode.
Surge Current Capacity - The rated surge current is the peak value of a current
pulse having the specified rise time and decay time to half value to which the
surge arrestor will be subjected at intervals of 30 seconds. This will not re­
sult in any basic change in the surge arrestor characteristics.
Transient - A pulse, damped oscillation, or other temporary phenomenon occuring in a circuit or system.
9oo
/or£>
/ C /<-■<V'V5
/
109
/ / i°
-
’ I
3.10 F/R System Power Distribution
Fig ure 31 depicts the F/R System dc and ac power d is t ri­
bution.
110
7 JZ
see
Ftc, m it s
FOR
IN P O T
Pc \N £R
dO N M EC TIO N S
8/N-w r N
FAMS
(?)
Ill
Fuses:
F 2 - BA
P 3-64
PLU6-RECEPT
IN R A CK-C
F S - 84
"r o t
tr an sla to r ."
MB F/R POWER SUPPLY
No t e s :
E ] LAMBDA *LV03-fS2R
2
| |l a m b d a
IN POT
NO*! -CRITICAL
POWER
B)sJ -W
POWER
breaker
breaker
—
ANTENNA
PO\NER
—
{ n o h -CRITICAL)
HSVAC
(oOfy
-O
•
I
*Les-ee-f>o\t\
I
M7
| F/R CSA JTw j
I
Mi
| DATA SET 3 |
o
I
Md/M
d is t r ib u t io n
CIRCUIT BREAKER CA8INBT
n &t
|--------
F!G. 3i- AC/DC POWER D IS T R IB U T IO N
4 .0
SYSTEM T R O U B LESH O O T IN G AND F A U LT DIAGN OSIS
T h e re are two levels of F/R System fau lt diagnosis:
(1 ) overlay
level on a console C R T and (2 ) d irect diagnosis at the antenna.
4.1
Fault Diagnosis on the O perator's Console
Fig ure
32 depicts
a fault
isolation
schema
which may be
used to diagnose faults in the F/R System using the F/R overlay
on the operator's console.
112
DQRWER b l o c k s in d ic a t e
/JCT/CAj S OR FAULT ISOLATION
TO BE PERFORMED A T AMTENMb
I
CHECK:
1) POW ER SUPPLIES
2) DATA S E T 3
3) TRANSLATOR POWER
V£S
CHECK:
DDATA S E T 3
2 )M 7 FJR CONTROLLER
CHECK:
1) STUCK SW ITC N ES
2) SNORTED SMiTCt-iES
CHECK'-
t ) F & CO N TRO LLER
2) DATA SET 3 / D C S
CHECK:
1) FROZEN DRIVE
2)TRA N SLAT0R FA U LT
3) S T U C K B R A K E
4 ) F R C O N TR O LLER
f R E P E A T FO R |
»R o t
D RIVE i
\CHECK:
CO N TR O LLER
WES
CHECK FOR *
1 )N D IS V R E A D O U T P O T
2 )N 0 > S E IN T E R F E R E N C E
OM POWER OR IN T H E
, c a b le R u n s
\r
I_____________
F IG .
£>
CM
32 -
F /&
3)EX
C E S S I V E M ECUAM ICAL
F R IC T IO N O R BIAJD/NG
FOCUS
DRIVE
OK
SYSTEM
F A U L T D IA G N O S IS
113
VIA T U £ O VER LA YS
4 .2
Fault Diagnosis at the Antenna
T h e following fault isolation tests indicate in tabular form
the important troubleshooting tests which may be performed in
the
pedestal
probably
outlined
room.
req uire
Serious
laboratory
below can
F/R
tests
Control unit malfunctions will
and alignment but the tests
be e v e ry effective in isolating
problems in the antenna.
F/R System
T h ese tests are stated in tabular form
rath er than a flow sequence as the F/R overlay fault isolation
sequence immediately suggests these te sts.
114
Unit
Function
Data Set 3 - M1
command/Q lines
Signal
CMD/Q/Data line from
antenna buffer
Instrument and Evaluation Technique
Data T a p : look for Q 's, CMS, Q's ± DS 0 (
1, 2, 3, 4, data.
Scope: observe signal waveform on DS 3,
test point 6.
data output lines
Data Set 3 data to
antenna buffer
DS 3:
look for flashing data out light.
Scope: ob server signal waveform on DS 3
test point 5.
parity erro r
Data Set 3
Data T a p :
Data Set:
v e rify CH 200g data contents.
observe parity LED .
115
Scope: observe signal waveform on DS 3
test point 4.
N O TE: DS 3 may not be faulty but
could be detecting some malfunction
somewhere in Monitor and Control or WCC
System which causes command or data loss,
5 MHz clock from
F/R Control
5 MHz Data Set 3 clock
Scope: observe signal waveform on termin
ation network on DS 8 JS-mm/nn p ins.
Should be 5 MHz, ~1.5 V P -P , clean ( i . e . ,
g litch -fre e ) and centered around ground
(ac-coup led ).
command and submux signals
SMA, clo cks, strobes,
and data lines
Scope: observe signal waveforms on DS 3
test points 12, 17, 23, 26, 27, 28, 29, 30,
31, 32, 33.
Unit
MCS-805-1
Brake Controller
HTR-1500
T ranslator
Function
Signal
Instrument and Evaluation Technique
brake power
dc output
DMM: check for correct brake actuation
voltage, ~+60 to +70 volts. Check antenna
alignment records for specific value for antenna
and focus or rotation d riv e . Must
be correct within ±2 V .
brake power
ac output (noise)
Scope: observe controller dc output lines
(both isolated from ground). AC ripple and
noise must be <1 mV in band 0 to 5 MHz. If
not, install 0.1 |j F , 100 volt capacitor across
RC in controller. Controllers may generate
noise which will interfere with F/R controller
operation. See F/R Control unit fault d isc u s­
sion. Also see paragraph 3 .4 .
motor drive
switching signals
A1, A2, A3, A4 and
center taps
Scope: observe motor d rive sig n als, A1 to
C T , e t c ., while F/R Control is driving
tran slato r, signals must be as shown in
Figure 33. O bserve dc presence on 2 of 4
lines when translato r is not being d riv e n .
Fault indications are e rratic or missing
switching waveform.
DMM: check for shorted or open d rive
tra n sisto rs on d riv e r boards.
control logic
power supplies
translator power
Harden's zot box:
check and repair boards,
Harden's zot box:
check and repair boards,
DMM:
test + and -13.5 V , +40 V.
Unit
TM-600
Translator
Function
motor drive
switching signals
Signal
M1, M2, M3, M4, M5, M6
Instrument and Evaluation Technique
Scope: observe motor d rive signals while
F/R Control is driving tran slato r. O bserve
waveforms A11 and A13 using M6 as common,
and, M3 and M4 using M2 as common.
Waveforms must appear as shown in Figure
33. Timing will v a ry at different drive rates,
however. O bserve waveforms during no­
d rive condition. Occasional positive pulses
should be seen on one motor pair ( i . e . ,
M1, M2, M6) and negative pulses on other
motor pair ( i . e . , M2, M3, M4). T h is
verifies proper operation of the "holding
cu rrent" to the motors. Absence of these
pulses or e rratic waveforms indicates
probable translato r fau lt.
DMM: check for shorted or open drive
tran slato rs on d riv e r boards.
HS-1500 and
M172-FD306
Drive Motors
control logic
d rive pulses
C heck for proper input: frequency rate and
voltages. Must be a T T L level (on off, +5 V
on) for proper translato r sw itching. Insure
TB 2-9 is logic HI (+2 V to +5 V ) .
If O V -LO ,
translator will not process input d rive pulses.
motor drive
A1, A2, A3, A4 and
CT1 (or C T 2 )
DMM: check motor winding resistan ce, should
be ~0.2 Q A1, etc. to C T on motor or ~0.6 fi
in pedestal room junction box. Windings
should be open to motor frame. Open lines
to translator before measuring motor lines
to ground. Water leakage can cause a
motor winding to short to ground (it has
happened). AM motor connections must be
correct and readings near values above.
_____ Unit_____________ Function____________ Signal
Fail Safe Brake
disengagement
brake dc power
from controller
Instrument and Evaluation Technique
DMM: measure dc voltage and brake terminals
in pedestal room junction box, apex junction
box and on brake. Voltage must be correct
(see brake controller note above) and polarity
on brake terminals co rre ct. Brake dc
resistance is ~425 ft.
Visual inspection: check for physical
actuation of brake and possible obstruction
due to flexible conduit entanglement (it has
happened). Check for ru st buildup and
physical binding (it has happened).
Readout
Potentiometers
pos readout
pot readout
DMM: observe readout resistance through
d rive range for noisy or erratic output.
Readout resistance should be static with
d rive stopped and should not v a ry more than
~.5 ft. Check v e ry carefu lly as noisy pots
are a subtle problem. P hysically shake F/R
Mount (using a fat old man for stim ulus) to
simulate antenna drive vibrations which can
induce pot noise in pots with marginal wiper
contact p re ssu re . O bserve resistance and
voltage readout v e ry care fu lly. Don't use a
DMM with a large integration time constant.
Scope: manually d rive pot through d rive
range and observe pot readout and HI gain
scope. The readout must be continuous and
noise-free. Scope should have gain of ~5
mV/cm and noise output should be <1 mV
P -P .
Unit_____________ Function____________ Signal
Instrument and Evaluation Technique
F/R Control: observe e rro r signal outputs
on Data T a p , channels 12«^13«. Under
static conditions e rro r signal, variations
should be <20 mV P -P . Physical inspection
may be required if pot is noisy or has a
leakage resistance to ground. Water
leakage into conduits can damage pots
(it has happened).
F/R Control unit
M7
brake controller
drive
brake relay drive
Scope: check F/R Control test points number
13 (focus brake relay) and 33 (rotation brake
re la y ). Check that these test points switch
to ground (from +15 V ) when UP/DOWN or
CW/CCW manual slew switches are activated.
(Con tro ller mode switch must be in lo cal.)
T hese points must also switch to ground
when controller is executing a command.
brake drive
dc voltage
brake lines and brake
sense lines
DMM: check controller dc output on
controller T B 1 , term 5 and 6, see note above
regarding brake controller dc output. Check
brake voltage in pedestal room and apex
junction boxes (see Figure 21 for term inals).
Brake voltage must be correct on brake
sense term inals.
M8 power supply brake release led should
illuminate if F/R Control unit detects
brake voltage >~30 V .
If this does not
happen then controller is faulty and logic
will not permit translator d riv e .
Unit
Function____________ Signal___________
Instrument and Evaluation Technique
120
translator drive
UP/DOWN and CW/CCW
drive signals
Scope: observe F/R Control unit test points
14, 15 (for DOWN and U P ), 34, 35 (rotation
CCW and CW). When associated manual slew
switch is actuated or when F/R Control is
executing a motion command. HTR-1500/1008
d rive signals should switch to ground (from
+15) and have a ~50 psec duration. Manual
slew rate should be ~500 Hz in 1 sec. See
paragraph 3.7 in this manual for details.
TM-600 translator d rive signals should switch
to ground from T T L HI (~+3.5 to +5 V ) and
have a duration of ~50 psec. Pulse rates
should be same as above.
pot exc
focus and rotation pot
exc lines
DMM: HP3445A, check controller test points
20 (H I) and 37 (analog ground) for -10,000 V
±1 mV. Don't tru s t any meter reading to
this level of precision if it is not an HP3445A
or a high precision equivalent. Reference
all precision voltage measurements to TP37
only, not to rack frame, etc.
Check for presence of pot exc in pedestal
room junction box, term T B 3 -7 , 8 and 5, 6
(foe e x c ), TB 1-19, 20 and 17, 18 (ro t e x c ).
See Figure 22.
Scope: check for noise interference on pot
lines, noise must be <1 mV in 0 to 1 MHz
band.
Unit
Function_____________Signal__________
pot readout
focus and rotation pot
readout lines
Instrument and Evaluation Technique
DMM: recognize that the DMM will load pot
output and cause several millivolts e rro r if
applied d irectly to pot. Therefore always
monitor pot output on controller test points
2 and 22. Never measure pot signals during
the execution of a motion command as the
meter bias cu rre n ts can influence the loop
behavior. Measurements after motion command
is completed are O K . But be v e ry careful
about this point.
121
Scope: Same admonitions about meter type
and referencing as above. Check for more
interference on pot lines, noise must be <1
mV in 0 to 1 MHz band. One command bit
corresponds to 2.4414 + mV on the readout
pot.
control loop
operation
pos e rro r signals
DMM: v e rify that e rro r signals are ~±1.25 V
for v e ry large e rro rs and 60 to ~0 for pot
volts = DAC volts (with +5.000 volt o ffset).
Gain should be ~50 for small e rro rs. These
signals are on F/R Control unit test points 4
and 24. Never attempt to measure erro r
voltage during the execution of a motion
command for the reasons cited above.
Measurement after command execution is O K .
Scope: carefully observe the pot lines and
e rro r signals for noise perturbations which
can cause premature noise-induced shut down
of the command. Noise can be caused by
the brake controller power su p p lies, antenna
d rive servo S C R 's and translator drive
sw itching. Coupling mechanisms are junction
box wiring cro sstalk and imperfect - rejection
of ac line noise through the power supplies
and line noise filte r.
Unit
Function____________ Signal
Instrument and Evaluation Technique
T he manifestations of this phenomena are a
large e rro r voltage and erroneous commanded
position. T h is has been a serious problem
for the F/R controller and has required the
incorporation of noise integration features
in the design and a high sen sitivity for
noise in the F/R environment.
limit switch
operation
foe UPPER/LOW ER and
rotation CW/CCW
switch signals
Wire jumper: wire the pedestal room
junction box jumper T B 1 -9 , 10 (IS O L +5 H I)
to the following points and observe that F/R
power unit panel LED 's are illuminated:
Point
TB 1-13,14
T B 1-15,16
T B 3 -1 ,2
T B 3 -3 ,4
Limit LED
foe UPPER limit
foe LOWER limit
rot CW limit
rot CCW limit
V e rify that d rive into the (apparent) limit
is inhibited when the indications are active,
Limit Switches
limit switch
operation
foe UPPER/LOW ER and
rot CW/CCW wiring to
pedestal room junction
DMM: reference meter low to T B 1-9 ,1 0 (IS O L
+5 comm). On apex manually actuate limit
sw itches and v e rify that +5 V switch indica­
tion is correct on following pedestal room
junction box term inals:
Limit Switch
foe UPPER limit
foe LOWER limit
rot CW limit
rot CCW limit
JB Terminal
TB 1-13,14
TB1-15,16
T B 3 -1 ,2
T B 3 -3 ,4
Unit
Function
Signal
Instrument and Evaluation Technique
A fter manual actuation v e rify that mechanism
switch actuators are properly aligned and
co rrectly actuate sw itch. Th ere have been
antennas in which switch actuators have not
been properly aligned.
Check for stuck or faulty limit switches which
signal a limit condition even though not
mechanically actuated.
T h is has happened. Rotation limit switches
are p articu larly susceptible to stickin g .
Water leakage into conduits has also caused
limit switch failu re.
F/R Drive
focus and rotation
mechanical drive
motor lin es,
pot lines
Manually d rive the F/R Mount by actuation of
the manual slew sw itches on the F/R power
supply (F / R Control unit sw itches must be in
local position). V e rify that mechanism will
d rive smoothly at about .040 in/sec (fo cu s)
and 1.6 deg/sec (ro tatio n ). V erify that the
d rive is smooth and brakes are not dragging.
If d rive motor runs smoothly and then
encounters an obstacle it may reverse
direction for ~ 1 second and then d rive back
to the obstacle. T h is oscillation can continue
indefinitely and has been observed on antenna
17 focus d rive when the focus limit switch was
misadjusted so that the mechanism drove into
the physical stops.
If mechanism does not d riv e , but motor drive
and brake actuation is correct then mechanism
Function
Instrument and Evaluation Technique
may be frozen due to ice accumulation in d rive
spline/lead screw boots. T h is has happened
on several antennas during and after snow
and rain when temperatures were low enough
to form ice.
If mechanism is stuck but ice buildup is not
at fault then there may be a mechanical
malfunction or jam. The F/R Control unit
will terminate an unconsummated command in
~150 sec to decrease probability of damage to
d rive tran slato rs. A number of HTR-1500/
1008 d riv e r boards have been zapped due to
stuck mechanisms (th ere is no motor back
emf to help limit motor c u rre n t). One tra n s ­
lator was burned up in tryin g to d riv e a
frozen d riv e . T h is event led to the incor­
poration of command shut down times in the
F/R Control unit.
If the mechanisms d rive smoothly in the
manual mode then command execution may be
attempted. Mechanism should d rive to e rro r
n u ll; stop and then e rro r voltage should stay
low. If e rro r voltage builds up after d rive is
terminated then mechanism friction is building
up. What probably happens in this case is
that the motor is "ahead" of d rive mechanism
due to drive friction and elastomer motor
coupling "wind-up" so that when motor
switching stops the spring torque in the
coupling will gradually move the d rive as
the frictional binding releases during
antenna d rive vib rations. The motor holding
torque is much greater than the brake
torque so that the motor end of the elastomer
Function
Instrument and Evaluation Technique
coupling is rig idly fixed and relaxation of
elastomer coupling torque must cause the
mechanism to sh ift.
Mechanism lost motion can influence F/R
System performance. For example, lost
motion or slack in the rotation d rive can
permit subreflector motion as a function of
antenna elevation angle and subreflector
unbalance. T h is can be tested by command­
ing the subreflector with the antenna vertical
and then observing readout change when the
antenna is tipped.
No mechanism can be totally tight and free
from lost motion effects; the F/R Mount
specs permit up to ±.5 mm of focus slack
and up to ±15 minutes of rotation sla ck .
In
addition there is readout lost motion from the
d riv e to the pot sh afts. The specs permit
up to ±.25 mm in focus and ±.2 degrees in
rotation. The worst case sums are then
±.75 mm in focus and ±27 minutes in
rotation.
4.3
T yp ical F/R Control Mount and T ra n sla to r Signal Waveforms
Figure 33 illu strates typical F/R Control unit and tran slato r
signal waveforms.
126
TB13-9, Blue, Quiescent Drive
50 V/D1V 5 ms/DIV
TB13-9, 100 pps Drive
50 V/DIV, S ms/DIV
TB13-9, 500 pps Drive
5 a V / B IV , -1 ma/Diy
f M W "?
V
127
TB13-11, Orange, Quiescent Drive
TB13-11, 100 pps Drive
TB13-11, 500 pps Drive
|HHI
H
m
m
m
a f H
m m
M M.JLML
w n r mA Lm
i
TB13-7, Red, Quiescent Drive
CJk JCJk A r g x
FIGURE 33a:
m
TB13-7, 100 pps Drive
TB13-7, 500 pps Drive
TM-600 TRANSLATOR DRIVE WAVEFORMS IN PEDESTAL ROOM JUNCTION BOX, ANTENNA 21 THROUGH 28
oV
TB13-9
100 pps Drive
10 V/cm, 5 ms/can
o V
TB13-9
500 pps Drive
10 V/cm, 5 ms/cm
1/
HTR-1008/1500 Drive Pulses
at F/R Control TP-14
500 pps, 5 V/cm, 1 ms/cm
FIGURE 33b:
TM-600 Drive Pulses
at F/R Control TP-14
500 pps, 2 V/cm, 1 ms/cm
HTR-1008/1500 TRANSLATOR DRIVE WAVEFORMS, ANTENNA 1 THROUGH 20
128
4 .4
Junction Box Signals List
Fig u res
and
physique
T he
29 and
30 depict the terminal strip configuration
of the
following
list
pedestal
is
room and
apex junction boxes.
a convenient grouping
of the F /R -
related signals and th eir location in the junction boxes.
Focus S ig n als:
Focus pot exc - hi
T B 3-8
Focus pot exc - low
T B 3-6
Focus pot readout - hi
TB2-16
Focus pot readout - low
TB 2-14
Focus UPPER limit inhibit
TB 1-14
Focus LOWER limit inhibit
TB1-16
Focus brake voltage +
TB 3-14
Focus brake voltage -
TB3-16
Focus brake sense +
TB3-10
Focus brake sense -
TB3-12
Focus motor d rive (HTR-1500/HS-1500 motor)
A.j output
TB13-2
A£ output
TB13-4
A 1^A 2^A3^A4 center
Ag output
TB13-6
TB13-8
A 4 output
TB13-10
Cable shield
TB15-12
Focus motor d riv e (TM-600/M172-FD306)
A 1 output
TB13-2
A 2 output
TB13-4
A 1 /A 2 center tap
TB13-6
Ag output
TB13-8
A 4 output
TB13-10
A 3 /A 4 center tap
TB13-12
Cable shield
TB15-2
129
Rotation S ig n als:
Rotation pot exc - hi
TB1-20
Rotation pot exc - low
TB1-18
Rotation pot readout - hi
T B 1 -4
Rotation pot readout - low
T B 1 -2
Rotation CW limit inhibit
T B 3-2
Rotation CCW limit inhibit
T B 3 -4
Rotation brake voltage +
TB 2-6
Rotation brake voltage -
TB 2-8
Rotation brake sense +
T B 2-2
Rotation brake sense -
T B 2 -4
Rotation motor d riv e (HTR-1500/H S-1500)
A 1 output
TB14-2
A 2 output
TB14-4
A 1^A2^A3^A4 center taP
Ag output
TB14-6
TB14-8
A 4 output
TB14-10
Cable shield
TB16-12
Rotation motor d rive (TM-600/M172-FD306)
output
TB14-2
output
TB14-4
A^/A 2 center tap
TB14-6
Ag output
TB14-8
A^ output
TB14-10
Ag/A^ center tap
TB14-12
Cable shield
TB16-10
System S ig n als:
ISO L +5 - hi
TB1-10
ISO L +5 - low
TB1-12
Commands/Q/mon data from A B -h i
TB9-10
Commands/Q/mon data from A B -lo w TB 9 -1 2
Monitor data to AB - hi
TB9-14
Monitor data to AB - low
TB9-16
130
5 .0
EQUIPMENT IN ST A LLA T IO N AND ALIGNM ENT
T h is
portion
of the
manual
is
devoted to the installation and
alignment of the electrical components of the F/R System .
and
alignment of the
mechanical
Installation
portion of the system is not d is ­
cu ssed .
5.1
F/R Electrical Components Installation and Initial T e sts
T he
are
F/R
installed
Fig ure 3.
control bin (B in W) and two Slo -Syn tran slato rs
as
pictured
in
drawing
98D19171,
sheet 2,
and
T h e re is no rack assembly drawing to date.
T he control and signal cables must all be installed prio r to
installation
of the
F/R
electron ics.
assumes that the Data S et,
The
following
description
Data T a p , F/R Control unit and F/R
power supply have all been ca re fu lly bench tested and are ready
for operation.
C heck the tran slato rs and brake controllers to
see that all boards are installed and wiring completed and neat.
Before installation of equipment all antenna cables should be
continuity tested as follows:
Motor lines - all lines should be open to ground and read
~1.6 Q winding-to-winding ( i . e . ,
w inding-to-center tap .
A1 to A2) and
FD306 motor center
taps
other and wired in a
6
lines
-
all
should
Q
AH motor lines must read this
resistance to th eir respective center tap s.
Pot
~ .6
The M172-
must be isolated from each
-w ire c irc u it.
read
open to ground and the pot
exc lines should read 20 kQ±1°.
between zero and 20,000 Q.
Pot readout should be
Pot excitation low and pot
readout low should be common.
Limit switch
lines - all lines should read open to ground.
B rake dc lines - all lines should read open to ground and
brake resistance should be about 425 Q.
Isolated +5 power lines - should be open to ground.
If any of these lines are grounded check firs t for a shorted
surg e
a rre ste r
in
the junction
boxes.
Also
there
have been
occasions when the cable ground drain lines have inadvertently
shorted junction box signals to ground.
131
Install the F/R power sup ply in the rig h t half of Bin W as
pictured
in
Fig ure
pages 234/235).
F/R
3 and
detailed
in
drawing
Remove the brake and tran slato r fu ses from the
power sup ply so that only the M8
powered.
T u rn
D13720P48 (see
power supplies may be
on the power sup ply and check that the bin
cooling fans blow a ir into the b in .
C heck for the co rrect dc
power on the bin I/O connector pins as follows:
Voltage
Slot 1 (F /R cont)
Slot 2(Data S et)
Slot 3(Data T a p )
Logic +5
J1 -C
J4-10
J4-10
Logic low
J1 -B
J4-34
J4-34
+15
J1-A
J4-16
J4-16
15
J1 -E
J4-17
J4-17
±15 low
J1-D
J4-42
J4-42
ISO L +5 hi
J1 -F
ISO L +5 low
J1-H
T h e isolated +5 supply should be totally open to ground.
±15 V
read
common ( i . e . ,
continuity
to
analog common) and logic common should
bin
and
rack
from
ground.
The
analog
ground mode point is a ground lug adjacent to the F/R Control
unit J1 connector block.
No ground cu rre n ts are carried by the
bin or rack metal stru c tu re s.
T h e power supplies should be set as follows:
+5 logic power unloaded
+5.100 volts
+ and -15 power
set to within 100
millivolts of
+ and -15
ISO L +5 power
factory
set
-
should
be within ±100 mV
of 5.000 volts
Install the F/R
Control unit in slot 1, turn on the power
and check the -10 volt pot excitation supply on the F/R Control
unit at J3-20 and J3-37.
If it has not crowbarred
(it is not
damaged by a pot wiring sh o rt) check for the presence of this
voltage in the pedestal room junction box on term inals:
132
T B 3 -7 ,8
(foe exc h i - i . e . ,
10 V ) ;
T B 3 -5 ,6
(foe exc lo ); TB 1-19,20 (ro t
exc h i - i . e . , 10 V ) ; and TB 1-1 7 ,1 8 (ro t exc lo).
Next
check
the
pot
readouts
in
the
junction
box
at
T B 2-15,16 (foe readout h i) , T B 2-1 3 ,1 4 (foe readout lo ); T B 1 -3 ,4
(ro t readout h i) ; T B 1 -1 ,2 (ro t readout lo ).
read some negative voltage between
With the
brake
F/R
controller
Control
These points should
and - 1 0 .
0
unit mode switch
fu ses in stalled ,
in
local and the
activate the four manual slew
sw itches and v e rify that the associated green brake release LED
on the
power
supply
is
illuminated.
If
not check the brake
voltage polarity at the following junction box term inals:
Focus
TB 3-1 3 ,1 4
+
power to focus brake
+
focus brake sense
+
power to rotation brake
+
rotation brake sense
TB 3-15,16
T B 3 -9 ,1 0
T B 3 -1 1 ,12
Rotation
T B 2 -5 ,6
T B 2 -7 ,8
T B 2 -1 ,2
T B 2 -3 ,4
Check
to see that this power is wired co rrectly and the
voltage is set to the correct level.
check
If the
wiring
for
110 volts
above
is co rrect but the voltage is absent
ac on the brake controller TB 1-2 and 3.
Also check that TB1 has a jumper between terminals 7 and
110
volts ac is not present ch e ck:
1
8
.
If
) the wiring between the
brake controllers and Bin W; 2) Bin W w irin g ; and 3) the F/R
power sup ply relay wiring and rela y .
A fter satisfacto rily power­
ing the brake check that the controller senses the brake voltage
and d riv e s the associated
LED on M8 .
If not check the con­
tro ller logic, LED d riv e rs and Bin W w iring .
With
activation
brake
power
operating
co rre ctly
check
in the F/R Mount by visual inspection.
to be fre e d from r u s t b in d in g d u e to in a c t iv it y .
133
for
brake
It may have
With an oscilloscope check to see that the brake controller
dc output does
co rrect
not contain
immediately.
See
any
ac
noise >1 millivolt.
If so
paragraph 3 .4 for co rrective action.
C heck the limit switch wiring and logic by jumpering the
following points in the junction box, T B 1 -9 ,1 0 to:
T B 1-1 3 ,1 4
foe UPPER limit
T B 1-15,16
foe LOWER limit
T B 3 -1 ,2
rot CW limit
T B 3 -3 ,4
rot CCW limit
V e rify that the associated red LED 's on the F/R sup ply are
illuminated and the associated tran slato r d riv e pulses are inhib­
ited
by
this
simulated
switch
activation.
C heck
to see that:
foe UPPER limit inhibits d riv e UP pulses
foe LOWER limit inhibits d riv e DOWN pulses
rot CW limit inhibits d rive CW pulses
rot CCW limit inhibits d riv e CCW pulses
Next check that physical activation of the sw itches on the
F/R Mount will cause the LED indications to illuminate p ro p erly.
Next install the tran slato r fu se s, one at a time, and v e rify
the
translato r
sw itches
and
fans
v e rify
are
ru n n in g .
that
the
A ctivate
mechanism
the
d riv e s
manual
smoothly
slew
by
observing the pot b uffer test points 2 and 22 on the F/R Control
un it.
"UP"
and "CW" d rive the two pot readout voltages to­
wards ground and "DOWN" and "CCW" should have the opposite
effect.
If th is test is successful the control loops may be closed.
Install
a command emulator
in
the
Data
Set 3 slot and inject
single-shot position commands into the F/R Control unit with the
mode switch
set to CMP.
mid-range ( i . e . ,
attempted.
With
Th e d riv e s should be set to about
— 5,000 volts pot readout) before this test is
a
command
of
1000
set
into
the
controller
qu ickly check to see that the mechanism is d rivin g in the co rrect
d ire c tio n
so a s to n u ll th e e r r o r .
If n o t, q u ic k ly h a lt th e d r iv e
by moving the mode switch off the CMP position (it clears the
134
command and inhibits tran slato r and brake d r iv e ).
motor,
cable
and
bin
wiring
C heck the
to co rrect the polarity re v e rsa l.
If the loop closes co rre ctly manually d riv e the mechanisms
into the limit sw itches to v e rify that they can be activated.
It
is desirable to v isu a lly observe the switch activation on the F/R
Mount to check that switch activators are mechanically aligned.
If the sw itches stick you are handy to free them.
d riv e
into the
d riv e p u lse s.
limits
is
inhibited
by observing
V e rify that
the translato r
D rive out of the limits should operate c o rre ctly .
135
5 .2
Electrical Alignment
T h e precision analog c irc u itry of the F/R Control unit may
be set up and aligned v e ry closely (-b e tte r than
0
. 1 %) in the lab
using a precision DMM (HP3445A req u ired ) but final alignment of
the electrical span and zero (D A C gain and zero) must be done
in the real operating environment as there are system properties
which are d ifficu lt to simulate in the lab.
The DAC gain and
zero adjustments are those which relate the analog equivalent of
the digital command argument to the pot span.
T h is
the
portion of system alignment should be performed with
antenna
vertical
so that there are no unbalanced torques
around the rotation a x is.
T h e mechanism slop (-20 to 30 min­
utes) may influence the alignment adjustm ents.
At th is point the SACRED+10 and -10 volt supplies should
be set v e ry close to the stated v a lu es.
justed
fir s t
by
setting
in
a
T h e DAC zero is ad­
sequence of alternate single-shot
commands with a zero argument ( i . e . , 320g and 321, value 0000)
and
adjustments
of
the
adjusted
to cause the
properly
adjusted
DAC
zero
pots.
The
zero
pots
pot readout to be -5.000 vo lts.
th is
value
will
alternate
around
are
When
-5 . 0 0 0
by
about .5 millivolt in focus and 1 millivolt in rotation for su cce s­
sive
commands.
mechanism
lost
Th e
alternation
motion
and
is
due
h y ste re sis
to a combination of
in the
controller e rro r
detector.
The DAC zero pots are:
Focus loop
F23-5/6/11
Rotation loop
F13-5/6/14
The DAC gain is adjusted at the 25% and 75% points at the
mechanism range by commanding set points of
which
should
position
the
readout
pot
at
o and 6000o
o
o
-7.500 and -2.500
2000
resp ectively.
The gain pots may have to be adjusted to realize
these valu es.
T hese command arguments are used because they
are in the normal d riv e
range and the limit switch trip points
tend to v a ry from one antenna to another and these arguments
a r e e a s y to rem em ber an d s e t u p .
136
Th e DAC gain pots are:
A
Focus
F18-1/2/15
Rotation
F13-1/2/15
v e ry
plugged
into
important
the
pot
admonition
or
e rro r
is
-
don't
voltage test
leave the
points
DMM
while the
command execution is in process - the meter bias cu rre n ts (even
though small) can influence the loops.
Wait till the command has
executed - then make the measurements.
A fter the alignment tests it is desirable to make some re ­
peatability measurements.
25 (th is
Connect the DMM to test points 5 and
point will not affect loop operation) and enter a se ­
quence of small command arguments in the sequence
100,
0,
100,
200,
100,
etc.
for
several
record the resultant data output.
and ( i . e . ,
( i.e .,
100
,
200
,
5) cycles and
Average the 100 UP values
values for arguments between
DOWN values
(sa y ,
,
0
0
and
200
) and the
100
values for arguments between 200 and 0 ).
Th e difference of the two averages is a measure of the h y ste re ­
sis
and
repeatability.
millivolts in focus and
It
is
1
to
2
c irc u it
values
for
h y ste re sis
are
~.5
millivolts in rotation.
important to check
deceleration
changes.
Typ ical
operation
the
command clock acceleration/
with
large
command
argument
The command clock should range from ~50 Hz to 500
Hz in about one second and range downtime should be about the
same.
The controller should d riv e the mechanism to null at the
low rate for about the last second of tra v e l.
If it does not do
so adjust
the + and -800 millivolt (nominal valu es) comparator
reference
pots to produce this effect.
Don't t ry to make the
adjustment too close to maximize the time efficiency as time or
temperature d rift might truncate the deceleration and cause null
e rro rs.
Install the Data Set and Data Tap and check to see that the
analog values are converted within 5 millivolts (the SACRED+10,
-1 0
volts
pot exc
and
two
position
readouts
valu es, the power supply values will be n o isie r).
137
are
the
critical
C heck that the F/R statu s data readout on bin ary monitor
channel 204g is co rre ct.
Record the F/R
System alignment data on the F/R System
T e st Data Form which is shown in Fig ure 34.
138
F/R S Y S T E M TEST DATA
Sheet 1/4
DATE
Test Procedure DWW-24C479
TESTS BY
M7 S/N
ANT
Ml S/N
DMM TYPE
M2 S/N
ANALOG GND REF - J3-37
M8 S/N
Min DMM RESOLUTION XXoXXX
POWER SUPPLY VOLTAGES ON M8 FRONT PANEL
B.
+15 V PS
-15 V PS
+5 Logic PS
Isol +5 PS
BRAKE CONTROLLER VOLTAGES IN PR JUNCTION BOX
Focus @
TB 3-13+
TB 3-15-
Rotation 9
TB 2-5+
TB 2-7_
+10 Ref Power Supply @ F3-10
-10 Pot Exc Power Supply @ J3-20
CLOCK RATES
Man Slew Clock TP
FOC
ROT
J3-11
J3-31
J3-12
J3-32
Freq, Hz
Command Clock TP
Accel Rate, Hz
Non Accel Rate, Hz
Command Set Point
ROTATION
FOCUS
COMMAND SET POINT
J3-2
J3-5
J3-22
J3-25
0000
2000
6000
Note:
Do not connect EMM to J3-2 and J3-22 until after
command execution is completed.
FIGURE 34 (Sheet 1)
139
S/N
Sheet 2/4
SET POINT R5P5ATA31LITY
Command
Foe Pos @ J3--5
Rot Pos @ J3-25
0000
____________ _______________________________
100 up
__________ ___ _________ <___________ _— —
200
____________ ___________ _____________
100 dwn
________ ,
_____ _________ _______________
000
______________ _________ _______________
100 up
_______
200
___________ ____________ _______________
100 dwn
____________
000
______________ ________________________
100 up
___________ ____________ _______________
200
______________ __________ _______________
100 dwn
______________ _________ _______________
_
---------------
.
000
____________ —
_________ _______________
100 up
___________ ... ..
---------------
200
________________________ _______________
100 dwn
____________ ___________ ______________—
100 up Average
________________________ _______________
100 dwn Average
______________ __________ _______________
100 up Avg - 100 dwn Avg ____________ ____________.______________
100 up Max - 100 up Min
_________________
_______________
100 dwn Max - 100 dwn M i n ____________ __________ ______________
FIGURE 34 (Sheet 2)
Sheet 3/4
ANALOG MONITOR DATA READOUT ON DATA SET/DATA, TAP
Address
Parameter
Reading
0
+5 Logic PS
_________
1
Isol +5 PS
_________
2
-10 Pot Exc PS
_________
3
+15/2 PS Mon
_________
4
-15/2 PS Mon
_________
5
Analog GND
_________
6
_________
14
Focus Pos R'dout
(J3-5 = +5.000)
Rot Pos R*dout
(J3-25 = +5.000)
Focus Cmmd DAC
(J3-3 = +2.500)
Rot Cmmd DAC
(J3-23 = +2.500)
Focus Error
(J3-4 = 'V/lOO mv)
Rot Error
(J3-24 = 'X'lOO mv)
Focus Trans Mon
_________
15
Rot Trans Mon
_________
16
+10 Ref PS
_________
17
Not Used
20/21
Aneraom #1
40/41
Anemom #2
7
10
11
12
13
FIGURE 34 (Sheet 3)
_________
_________
_________
_________
_________
Sheet 4/4
BINARY MONITOR DATA READOUT ON DATA TAP, ADDR 204rt
‘ 1
O
Function
Bit &
Check OK
Not Used
20-23 (MSB)
Trailer Mode
19
_______________
Local Mode
18
_______________
PF Mode
17
_______________
Cmp Mode
16
Not Used
15
Rot Cnmd Time-Out
14
Rot Slew Active
13
Rot Cmmd Active
12
_______________
Rot Brake Release
11
_______________
Rot COT Actuated
10
_______________
All l's Readout
1 Readout
______________
Rot CW Actuated
9
_______________
Rot Cmmd Active
8
_______________
Not Used
7
Foe Cmmd Time-Out
6
_______________
Foe Slew Active
5
_______________
Foe Cmmd Active
4
_____________
Foe Brake Release
3
_______________
Foe LL Actuated
2
_______________
Foe UL Actuated
1
______________
Foe Cmmd Active
0
1 Readout
(LSB)
FIGURE 34 (Sheet 4)
__________
6.0
DRAWING REFERENCES
6.1
Applicable Antenna Cable D raw ings, Antenna 1-20
98D19171, Sheet 1
Antenna Cabling Installation - Data Control
and D rive
98D19171, Sheet 2
Cable Diagram - Electro n ic, V LA Antenna
98D19171, Sheet 3
Cable Assembly W101, A ntenna, Apex
Control Lines
98D19171, Sheet 4
Cable Assembly W102, Antenna, Focus
Motor D rive
98D19171, Sheet 5
Cable Assem bly W103, A ntenna,
Rotation Motor D rive
98D19171, Sheet
6
Cable Assem bly W104, Antenna, Data Set
Control and A u x ilia ry
98D19171, Sheet 7
98D19171, Sheet
Cable Assembly W105, Front End Control
8
11
"
"
98D19171, Sheet 9
"
"
"
98D19171, Sheet 12 Cable Assembly W108, Bin W to
F/R T ra n sla to rs and B rakes
98D19171, Sheet 13
"
"
"
98D19171, Sheet 14
"
"
'•
98D19171, Sheet 15 Cable Assembly W109, Focus
T ra n sla to r Outputs
98D19171, Sheet 16 Cable Assem bly W110, Rotation
T ran slato r Outputs
98D19171, Sheet 17 Cable Assembly W111, F/R Brake
Controller dc Outputs
98D19171, Sheet 18 Cable Assembly W112, Data Set
Control Lines
98D19126, Sheet 1
VLA Prime Feed Mount Assembly
98D19126, Sheet 2
98D19139, Sheet 1
98D19139, Sheet 2
98D19140
Mounting Panel Assembly
ii
ii
n
Junction Box Assembly - Apex
(Prime Feed Mount)
98D19142
Junction Box Assembly - Pedestal Room
143
6. 2
Applicable Antenna Cable D raw ings, Antenna 21 and Up
C13720S3
F/R D rive Unit Wiring Diagram
C13720S2
Wiring Diagram, Prime Focus Junction Box
144
S EC T IO N C
FO C U S/R O T A TIO N C O N TRO L UN IT
T A B L E OF C O N T EN T S
IN TRO D U CTIO N
149
G EN ER A L D ESC R IP TIO N
152
D E T A IL E D FU N CTIO N A L D ESC R IP T IO N
154
3.1
+10 and -10 Volt Reference Supplies
154
3 .2
Command Input and Storage Logic
155
3.3
Analog E rro r Detectors and Data B u ffers
156
3 .4
Command Reset and Tim e-Out Logic
159
3.5
C ontrol/In hibit Interface
160
3.6
Acceleration/Deceleration Logic
161
3.7
Analog Data Multiplexing
163
3.8
B in ary Monitor Logic
165
3.9
Reset and Mode Control Logic
166
MODULE ALIGNM ENT PR O CED U RE
177
I/O AND T E S T POINT SIG N A L PIN ASSIGNM ENTS
194
S P E C IA L COMPONENT DATA S H E E T S
198
145
TABLE OF FIGURES
Figure 1: F/R System Block Diagram
151
Figure 2: F/R Control U nit, Block Diagram
153
Figure 3: Simplified Schem atic, Analog C irc u itry and
E rro r Detector
158
Figure 4: E rro r Detector T ra n sfe r C h a ra cte ristics
189
Figure 5: M7 T e st Data
190-193
Figure
195
6
: Front Panel (J3 ) T e st Point Connector Signals
Figure 7: M7 J1 Signal Assignm ents
196
Figure
197
8
: M7 J2 Signal Assignm ents
146
TABLE OF DRAWINGS
Location in Manual
T itle
Focus Control Logic/Tim e-Out Logic
167
Focus Analog C irc u itry
168
Rot Control Logic/Tim e-Out Logic
169
Rotation Analog C irc u itry
170
Focus Control/In hibit Interface
171
Rotation C ontrol/In hibit Interface
172
Monitor Logic and Analog Multiplexing
173
Foe Acc/Decel Logic
174
Rot Acc/Decel Logic
175
F/R Power Wiring
176
147
T A B L E OF COMPONENT DATA SHEETS
T itle
Location in Manual
LM199/LM299/LM399
199
Analog Devices A D 7 4 1 J ,K ,L ,S
205
Zeltex D-A C o nverter
209
148
1.0
IN TRO D U CTIO N
T h is
theory
of
manual
d escrib es the F/R
operation,
specifications
Control unit (module type M7)
and
alignment and
is
prim arily
intended to serve as the prin ciple maintenance, repair and alignment
guide.
The
flector
F/R
Control
system
and
unit is the controller for the antenna su b re ­
performs the function of positioning the su b re ­
flector to d irect the antenna beam into one of the antenna feed ho rns.
T h is involves rotating the subreflector to d irect the beam into one of
the off-center feed horns and raising or lowering the subreflector to
focus the beam in the selected feed horn.
the
F/R
System
manual
for
T h e reader is referred to
a more detailed
description
of system
operation and location of the components in the antenna.
Figure 1 depicts the block stru ctu re of the F/R System .
Position
which
are
derive
an
readout
potentiometers
compared
e rro r
with
commands
sig nal.
Th e
indicate the mechanism position
from
e rro r
the
signal
control
computers
modulates
to
motor drive
translato r clocks and the translato r converts these clocks into motor
power switching signals which cause the stepper d rive motor to d rive
the mechanism so as to null the e rro r.
The d riv e mechanisms are locked in position by fail safe brakes
which are energized to disengage the brake when a command is active
in
the
controller.
mechanism
due
to
The
brakes
unbalanced
prevent
forces
or
inadvertent
torques
motion of the
which
might
be
induced by antenna d rive vib ratio ns.
Limit sw itches are positioned near the extremes of motion of the
d rive
mechanism
damage caused
to provide an inhibit to the controller to prevent
by d rive into the mechanical stops.
The controller
logic inhibits fu rth e r d rive into the limit but permits d rive out of the
limit.
The
three
subreflector
locations
Focus",
by
may also
placing
the
be manually controlled from any of
front
panel
mode switch
in
"Prime
"Local" or "T railer" which permit manual push button control
of position from these locations.
"Prime Focus" control is implemented
149
by
a "Prime
Focus
junction box.
Zot
Box"
which can be plugged into the apex
"Local" control is implemented by manual push buttons
on the F/R power supply (module type M8 ) in Bin W.
LED 's on M8
indicate activation of the brake controller and actuation of the limit
sw itches.
When controlling the subreflector in the "Local" mode the
subreflector
position
may
be
sw itches to C o n t., A d d re ss,
monitored
by
setting
DCS=0, DS=3, MUX to
6
the
Data
and 7.
Tap
See the
Data Tap Manual, VLA Technical Report 38, for details on operation
of the Data T ap .
The "T ra iler" mode position enables a remote M8 power su p ply to
control the position of the sub reflector by the use of the sw itches
and ind icators.
display
A Data Tap may be used at the remote location to
subreflector
position.
T h is
mode of operation
is used for
isolated sin g le-d ish observations.
The
Control
command
and
monitor
operations
performed
by
the
F/R
unit are controlled by Data Set 3 which is adjacent to the
controller in Bin W in R ack-C in the antenna pedestal room.
Other
components in Bin W are the M8 power supply which provides logic
and analog power for Bin W and a Data Tap (module type M2) which
permits local trapping and display of F/R (and other) command and
data m essages.
T h is manual contains a detailed alignment procedure (paragraph
4 .0 ) which is stru ctu red in a manner consistent with the logic depen­
dency relationships of the controller so that it may serve as both an
alignment and troubleshooting
procedure.
In general,
any time the
module is removed for service the analog portions of the alignment
procedure should
be repeated even though there may not have been
an analog problem with the unit.
150
FOC LIMIT
ROT L I M l T
CCW O
SWITCHES
S W IT C H ES
CW o
^-------------- i / ? o r )
ccw
t T 1
MOTION
1
1
< iQ 8 T i>
I
/\ Rot
FOC
D R W E 'fv/\
M OTOR
SUBRE1PLECTOR-
\
PCC
BRA KE
___________
.
H
?!
•5
^jS
$-tM
I
z,
O
> h;,
O'
Oi in
o
o.
U
!
r
5- °o
-J
u.
Ul:
in.
z>!
u
V)j
5|Si
®G|<?
L. i!•*
vi»
*!3
Hji
Qt: jCk:
< vj>;
uli <!
I I Q!: p
Z!
i
Ui
ID
£n)
Ui
VO
< (fl:
(D
:
O
UJ.
M O T O R
ro t y
BRAKE
N—
i
i
! U)
1 in
X 2
o tit
( M } DRIVE:
FOC D R IV E
m A M SLA TO R
o
>i
I
/
/
LU
* '!
O
X
CD,
/
A
ROT
*1o d
V
LU i
Dr
D
vr
Q
Q
©I;i a
h
hi
Oi s 5
G! or
BRAKE
CONTROLLER
! CONTROLLER
O*
o
LL.
FO CUS
-ft*
( P/o
CPlo M l )
M l)
T
C O M M A S OS
p//? C o m m a n d s
! BU FFER
H R MOMi TOR
D ATA
FIG. ] -
F /R
SYSTEM
h*-
ROTA T iO M
CO M M AN D S
| ANTENNA
4-
ROTATION
CONTROLLER
co n troller
DATA SET
3
BLOCK DIAGRAM
151
H
<ci
in! 3 i
?l
j i
?!
£ O T O G IV E
T& AN SLA TO R
FOC
BRAKE
205'»;
(
2 .0
G EN ER A L D ESC R IP TIO N
The
F/R
Control unit is packaged in a standard 1 wide module
with the electronic components plugged into w ire-w rapped logic con­
nector boards.
A front panel mode selector switch selects the op er­
ating mode of the controller as described e a rlie r.
Fig ure 2 depicts the block stru ctu re of the F/R
Th e detailed functional d escrip tion ,
block stru c tu re .
Control un it.
paragraph 3 .0 , is keyed to this
The reader will note that the F/R Control unit logic
stru ctu re con sists of two controllers which are capable of independent
simultaneous operation.
Th e logic and analog c irc u itry design of the focus controller and
rotation controller are identical except for component locations so this
manual will describe only one controller;
the reader is expected to
apply the description to the other controller as required to trouble­
shoot or align the u n it.
Th e logic in the F/R Control unit is simple and straightforw ard
and
there
are no real concerns for speed,
glitch tolerances,
e t c .;
however, the analog c irc u itry must be set up and tested carefu lly as
care lessn e ss
in
test
or
alignment
can
compromise
performance
or
a ccu ra cy .
Th e F/R Control unit uses 50 and 34 pin AMP connectors for the
bin
I/O interface and a front panel 37 pin cinch connector for test
point a ccess.
Th e power demands of the F/R Control unit are:
+5 Logic Power
1
.5 amps
+15 vo lts----------
150 MA
-15 v o lts----------
100 MA
152
D ATA
POT BUFFER
FOC
r QT
------»
—
pot
J
BUFFER
Ov
~ / 0 v TO
rDM/rl
TO DFTA S E T
VIA ANALO<b
P O S IT IO N M J l: r IP L E X E R
pos
I
+ IO V
REF
FOC
FOC C ///r\ OMD Vd/r.
DAC /
i2
CMC
~±sZ
CLKi
[c o m p a r a t o r s
control
1 C 'RCUiTR / ___-
flO A P
UP
FROM |
D R IV E
CMD
320
CONTROL
Co n t r o l
330
LOGIC
LOGIC
DATA <
-U)
4
32/
s7co-* ADDRESS
-T ‘5r ----•
"
35 1
C)ECO
D
£RZ
Sf/)/3
I'iWill II
'L/,V£S~
_
CL*’'
gZSET
START.
ROT
D R IV E
CONTROL
LOGIC
stop
S TA R -r
.RESET
g TE E R UP
F O C ( J3
,
CONTROL 4
/A/U/B/T
IN T E R F A C E
LO G IC
-«R»
STEEP! DOW A #
I’ CMP
:\'E D O N E ----------------dr
1
1 APEX o
| LOCAL o
FO C
T IM E -O U T
LO G ' C
d p iv l : pul z e s
BRAKE EN3L
BtNAR'f
T
'S T A T U S
J^
BlNAPV
DATA
- 1 LOGIC
jJTPLA? o
MON 2 0 4
E/-J&L ‘
J
BlNARV
DATA TO
- > DATA
SET 3
S T A R T E XE C U TE
COMPARATORS
$ CONTROL
STEER C C W
C IR C U IT R Y
ACCEL/
conbrol
DECEL
LOGfC
vol toga
ROT
CMD
MULTIPLEXER.
“ /o v POT
EXCITATION
(S T O P )
(S T O P )
5U & -M U X
ADDPESS
F/R CONTROL £ W /T f
BLOCK
BRAKE E N b L
ROTATION
TRANSLATOR
, DRIVE PULSES
T
MUXs
CMP
CMD
IN HI& IT
IN T E R F A C E
LO GIC
CLK
TO DATA S E T
POSITION
R O T A T IO N ,
CONTROL 4
DRIVE
CLKS
^ VtA A N A L O G
^ 0 T )-------POT r
' ^
M 3 LOCAL
D RIV E CM OS
STEER c w
/
FIG • 2
TRANSLATO R
. DRIVE DO N E - STOP
ROT CMD INPUT £
STORAGE REGISTER.
3 2 0 FOC DRIVE
321 ROT DRIVE
3 3 0 FOC RESET
331 P O T R E S E T
Down
— *...
vV/S LOCAL
DRIVE CMOS
RQT
T IM E -OUT
LO G IC
1
CO M M AND
FOCUS
D R IV E
i M O D E SVJ!TC n\
STA & T E X E C U TE f
FOC
J l
L
X b its
FOC CMD IN P U T 4
S T OR AGE Q £G ’S T E R
BRAKE
VOLTAGE
SENSE
I S Wy/r
IT C H E S I
UL ------- / ,
DIAGRAM
£ cw
geM e i
I L I M IT
I VOLTAGE
& I L T£ U § ? J se/vs E
ANALOG
M O N IT O R
DATA
m i
A N A LO G
M O N IT O R DATA
MULTIPLEXER
ANALOG
^ D A T A TO
DATA S E T 3
3 .0
D E T A IL E D FU N C TIO N A L D ESC R IP T IO N
T h is section d escrib es the focus controller in detail; the reader
is urged to refer to the reduced size schematics in the back of this
manual.
3.1
+10 and -10 Volt Reference Supplies
Analog
operations
are
characterized
by
the
use of para­
meters such as resista n ce , voltage, c u rre n ts , positions, e t c ., to
a
level
of precision
consistent
with
the
system
requirem ents.
In the F/R Control unit the prim ary reference is a precise
+10
volt reference su p p ly.
T h is +10 volt supply se rve s as a reference for the DAC's
and generates precise offset cu rre n ts for the e rro r detector and
data buffer amplifiers and also d riv e s the position pot excitation
amplifier.
The
+10
precision
reference
uses
an
LM299H
reference chip which generates a high stability
+7
precision
volts which is
amplified to +10 volts by noninverting amplifier F3-10 which has
a gain of - 1 .4 .
output.
See
Pot F2-1/2/15 is adjusted to set the +10 volt
paragraph 4.0 for the set up of this
referen ce.
Th e LM299H details are described in the data sheet in paragraph
7 .0 .
The +10 precision
reference c irc u it is shown on sheet 4,
location D/7, of the logic diagram s.
T he
-10 volt position pot excitation amplifier (F3-14) is an
inverting
amplifier with a gain of
volts
pot
by
F2-3/4/13.
R esistor
1 .0 0 0
and is set to - 1 0 , 0 0 0
F4-7/10
raises
the
impedance of this circu it so that it is sh o rt-circu it proof.
source
The
position pot excitation amplifier is shown on sheet 2, location D7,
of the logic diagram s.
See paragraph 4.0 for details on the set
up of this c ir c u itr y .
154
3 .2
Command Input and Storage Logic
Focus commands are se ria lly loaded (see sheet 1) into sh ift
reg iste r D14 and D13 by the Data Set when enabled by ad d ress
enable 00 (command MUX address=320g).
At the completion of
the serial load the sh ift reg ister contents are parallel loaded into
static storage reg iste rs D9 and D10 by the focus command strobe
(also
qualified
by
the
ad d ress
enable 0 0 ).
T h is
identical to that d iscu ssed in the Data Set Manual.
Set
Manual
(V L A
Technical
Report
30)
discussion of command logic and timing.
is a
the
bit
12
24-bit
2
for
c irc u itry
is
See the Data
a more extensive
Th e command argument
's complement value in the least significant half of
command
valu e.
In ve rte r
D21-4
converts
the
2's
complement code to offset binary code for the D A C .
The focus command strobe also sets control flip-flop D20-11
which
initiates
the
command
logic
sequence
focus brake controller via A20-10 on sheet 4.
and
tu rn s on the
T h e positive edge
output of D20-11 trig g e rs delay one shots D12-6 and D12-9 which
provide a 1-|jsec sta rt execution pulse after a 300-psec delay to
enable the focus brake to disengage before motor d rive switching
is started .
The 300-psec delay also enables the DAC and analog
comparison c irc u itry to settle before e rro r comparison is enabled.
The
acceleration/deceleration c irc u itry
is also initialized during
this delay.
An
ad d ress
decoder
(EG37 on sheet 7) decodes the four
submux ad d ress bits and provides address enables for the com­
mand
clo ck s,
decoder
also
data
and
provides
strobe
lines
from the
readout enables
for
Data S et.
the
The
binary monitor
data and command readback logic.
The focus command in sh ift reg iste rs D14 and D13 may be
read out as binary monitor data by the Data Set.
3.8
for
a description
of the
readout operation.
See paragraph
T h is feature
permits round-trip echo verificiation of the command path.
155
3.3
Analog E rro r Detectors and Data B u ffers
Figure 3 depicts the analog c irc u itry of the controller.
Pot
buffer F25-10 provides a high impedance buffering of the 20 k
position
pot and
d riv e s
the
buffer (F20-10) op amps.
e rro r
detector (F25-14) and data
Pot F23-7/8/10 nulls amplifier F25-10
input offset voltage.
T he
12
paragraph
bit
7.0
DAC
for
(Zeltex
d etails)
ZD 432,
uses
the
see the
data
precision
+10
sheet
in
reference
rath er than its own internal reference so that the DAC zero and
gain adjustment must be done external to the D A C .
Pots F23-
5/6/11
functions.
and
E rro r
F18-1/2/15
detector
resp ectively
F25-14
is
an
perform
inverting
these
bounded
summing
amplifier with a feedback capacitor so that it also functions as a
short time constant integrator
(-1 0 0
psec) for noise and "glitch"
smoothing.
T h is amplifier has a gain of ~50 for small e rro rs but
is
reduced
sh arp ly
v o lts.
for
e rro r
greater
than
about
.5
T h e gain reduction is accomplished by the series diodes
across the feedback re sisto r.
near
voltages
e rro r
e rr o r s .
The
null
but
T h is feature provides high gain
p revents
amplifier
amplifier
output
is
~+ or
saturation
for
-1.25 volt for
large
5 volt
e rro rs.
T he DAC output range is +5, 0, -5 volts for the range of
the
12
-bit argument, therefo re, the position pot output is scaled
10 V/4096 or 2.4414+ .___millivolts per bit.
T he e rro r detector output d rive two precision comparators
(F16-11
and
F21-11)
which
compare
the
signal with +.01 and -.01 volt referen ces.
X50
amplified
e rro r
When the e rro r signal
falls within these bounds one of the comparator outputs sw itches
to stop the motor d rive and clear the command state in the con­
tro lle r.
Capacitors
F18-17/10
and
8/9
(4 .7 jjF )
on
the
time
response pins of the comparators prevent the comparators from
switching on pot or power supply noise (th ere is a lot of ac line
noise in the antenna) with the resu lt that the comparators switch
with a time lag of about 5 milliseconds with an input o verd rive of
156
about
10 m illivolts.
T h is
lag
is
about 1/4 the
focus translato r d riv e clock (~20 m s).
period
of the
T h e outputs of F16 and
F11 are open collector with pull-up resisto rs to +5 v o lts.
These
outputs d riv e the T T L logic which enables and ste ers the tra n s ­
lator d riv e clo cks.
An
important
property
50 millivolt h y ste re sis
pot or
b it).
(which
of
the
comparator c irc u itry
is
a
is equivalent to 1 millivolt on the
T h is h y ste re sis compensates for modest amounts
of pot wiper noise which tends to cause premature switching of
the
com parators.
The
50 millivolt value was determined to be
about rig h t by empirical tests on early antennas.
mentioned
It should be
here that these pots get noisy in a short time and
have only a year or so life expectancy before they become too
e rra tic for se rv ic e .
T h e degradation is probably due to v ib ra ­
tion-induced wear at the four associated feed horn locations in
the pot.
157
OFFSET
4------ AA/V-—
+ IOV
----—
O * GAIN
POS/T/OAJ DATA
R EA D O U T
G£HaJ - - 2 ,0 0 0
>
(TO DATA S E T 3 )
+ I5 V
+ VREF
/\^\/\y
-1 0 — W
(>-—
/WV/— ■
-W — M -
-tc \j pern
BXCtr
—
Sl/MMlAiG
Jv<JCr/OA> ")
1 (—
AA A
W
A
W
J,
"
^ S T E E R UP
---- V A ,
X*-.
«-■ft
>
M \—*
ERROR
ANQ
in
Co m p a r a t o r s
GMD V
00
POSiT/Obi REAOOOT
POT CAT APB'x)
—
AAA.-
4 -\
STEER DOW N
+IO.OOO\i
^ —/W \ ,< x
- V /?££■
DAC REF
DAC CMP
VoLTAOB
12 8 /T C&MMAMO STATE
(1 6 /T = 5 mm )
<r
C4
/•/(?•
3
-
S IM P L IF IE D S C H E M A T IC t ANALOG
C IR C U IT R Y 4 E R R O R
D E TE C TO R
3 .4
Command Reset and Tim e-Out Logic
Commands may be reset by issuance of a 330g command (the
argument
is
irrele v a n t
since
it
is
not
u se d ).
T he
address
decoder (d iscu ssed in paragraph 3 .2 ) is AND'd (on sheet 1) with
the command strobe in gate B22-15 and OR'd in gate D11-14 to
clear the d riv e enable D02-5 which in tu rn clears control flip flop D20-11.
A timer resets commands on a default time-out b a sis.
The
timer is a 14-stage CMOS counter/oscillator (B 20) which is en­
abled
"on"
from
the
reset
state
by
control
flip-flop
D20-10.
When the counter reaches a count of 8192, pin 3 goes high which
resets the d riv e enable flip-flop
D02-05 and also sets flip-flop
B5-11 to signal a time-out fau lt.
T h e R /C c irc u its of C13 d eter­
mine
Th e
the oscillator
oscillator
time-out
period
freq uency
freq uency
is
to be about
and
hence the
roughly
150 se c;
55 Hz
time-out
which
period.
causes
the
if the command has not
been completed in th is period there is something wrong so it is
best
to clear
the
command
and
stop
attempting
to d rive
the
mechanism.
T h is command reset and time-out logic is located on sheet
1, location C5.
159
3 .5
C ontrol/In hibit Interface
T h is
logic (sheet 5) performs the function of sensing en­
able/inhibit conditions in the mechanism and permits or inhibits
d riv e
clocks
to
the
conditions sensed.
focus
tran slato r
in
accordance
voltage
the
T h e inhibit conditions sensed are the a ctiv a ­
tion of either the UP or DOWN limit sw itches.
brake
with
at the
brake tra n sla to r.
apex
enables
d riv e
T h e presence of
clocks
to the
focus
T h e enable/inhibit conditions are detected by
optically coupled isolators to avoid ground noise effects.
Manual
control
of the
focus
d riv e
is implemented in this
logic and is qualified by the front panel mode control sw itch.
Th e manual control
and
limit switch
clocks
d riv e
logic is also enabled/inhibited by the brake
conditions
described
above.
Eith er
command
or manual slew clocks are permitted to d rive the focus
tran slato rs
half of sheet 5.
through
the
combinational logic on the right
T ra n sla to r d riv e clocks switch to ground from
+15 volts from open collector b u ffe rs.
Nor gate
focus
brake
A30-10 and open collector buffer A14 d rive the
ac
relay
(an
optically
isolated
solid
state
relay
to the
con­
located in M8 ) to disengage the brake.
The
brake
and
switch
indications
(external
tro lle r) are d riven by open collector d riv e rs on this sheet.
160
3 .6
Acceleration/Deceleration Logic
An important requirem ent of the Focus/Rotation System is
th a t
the
mechanisms
move
rapidly
to the
commanded by the control computer.
be
stepped
new
settings
when
To do so the motors must
at high speed but there is a problem in th at the
motors do not develop sufficient torque at high stepping rates to
s ta rt the mechanism into motion.
The problem is th a t the motor
torque/speed curve drops o ff quickly with stepping rate and the
mechanisms
motors
present
so it
(<200 H z)
possible
high
inertial
is necessary to
and
then
and
frictional
s ta rt the
accelerate
the
motion
d riv e
loads
at
to
the
low speeds
clock to the highest
rate fo r the bulk of the mechanism d riv e .
When the
mechanism has traveled over most of the commanded range the
d riv e system must be decelerated to a low speed before e rro r
null is reached or the load inertia will cause the mechanism to
slew
past the
term inated.
null
The
even
though
the
motor d riv e switching is
F/R Control un it is set up to sta rt the motor
d riv e at about 50 Hz, ramp to 500 Hz in about 1 second, drive
to new null and then ramp down to 50 Hz in one second.
ramp down is completed one second before nu ll.
of
50/500 Hz
always w ork.
always
and
one
second
ramps
has
The
The combination
been
determined
to
Higher d riv e speeds have been tried but have not
been usable;
in some antennas the mechanisms will not
d riv e reliably above 500 Hz.
The acceleration/deceleration
sion
as to
whether
e rro r is small ( i . e . ,
acceleration
logic performs a logical deci­
is
req u ired ,
which is;
if the
<~800 mV) the mechanism is driven at low
speed to the commanded position.
If the e rro r is greater than
this value the acceleration sequence is in itiated.
The focus acceleration
logic c irc u itry
The
focus
is depicted on sheet
8.
Q output of the
in it ia liz e s fo c u s a c c e le r a tio n
causes
the
UP/DOWN
lo g ic ,
counters
161
brake
delay
f lip - f lo p s
C7 and
one
shot
D12-7
C 9 -5 and C 9 -1 0 , and
C8 to load a count of
zero.
D uring this brake delay period the analog elements such
as DAC's and comparators have adequate time to settle.
Comparators C1-14 and 7 compare the focus e rro r and + and
-800 m illivolt
bounds
of
references.
these
two
If
the
references
e rro r
the
signal
is outside
acceleration
the
sequence
is
initiated when the focus execution strobe (a t the completion of
the
300-psec
brake
delay)
sets
flip -flo p
C 9-5.
This flip -flo p
enables ramp clocks to increment UP/DOWN counter C7 and C8 to
a full
count of 256.
When this state is reached the two TC
terms from C7 and C8 cause the counter to be disabled via nand
gate C18-4 which causes the counter to remain at this full count
state until deceleration is in itiated .
The e rro r signal will dimin­
ish as a result of mechanism d riv e ; as it becomes less than + or
-800 millivolts the comparator clocks the direction flip -flo p C9-10
to cause the UP/DOWN counter to decrement to 0 from 256.
The
counter is unlocked from the full count state by one shot C11-6
via nor gate C 18-4.
The C7 and C8 counter states d riv e the m ultiplying
C12
which
converts
the
count
states
into
an analog
DAC
c u rre n t
which is converted into a voltage by op amp C14-14.
Op
control
amp
input
C14-10
of
555
inverts
timer
this
signal
D06-13 on
to d riv e
sheet
1.
the
A
voltage
reference
voltage of — 2 .4 volts is provided by zenar diode C 15-9.
Capacitors C6-12 and 13 slow the response of comparators
C1-14
and
C 1-7
so th at
pot
noise does not induce premature
deceleration.
The ramp duration
timer C10-3.
is determined by the frequency of 555
This should be set to about 250 Hz so th at the
counter sequences through 256 states in about 1 second.
162
3 .7
Analog Data M u ltip lex in g
The F/R Control u n it has an internal 16 channel differential
m ultiplexer which (u n d e r Data Set control) selects among analog
monitor points fo r conversion to digital values by the Data Set.
The analog m ultiplexer c irc u itry
is pictured on sheet 7 of the
logic schematics.
The analog m ultiplexer uses two eight channel CMOS b reakbefore-make m ultiplexer chips whose outputs are w ire-O R 'd to ­
g eth er.
Four submux address lines from the Data Set (S M A -0,
SM A-1, SMA-2 and SM A -3) are inverted and d riv e the four chip
address lines.
The monitor points selected are associated with vital system
functions and are used fo r malfunction and diagnostic purposes.
The actual addresses and monitor points are:
Address
Monitor Point
0
+5 V Logic Power
1
5 V Isolated Power
2
-10 V Pos Pot Exc
3
+15 V /2 Power
4
-15 V /2 Power
5
Analog Ground
6
Focus Position
7
Rotation Position
10
Focus Command DAC
11
Rotation Command DAC
12
Focus E rror Voltage
13
Rotation E rro r Voltage
14
Focus T ranslator Power Mon,
~+2.5
15
Rotation Translator Power Mon
-+ 2 .5
16
S A C R E D + 1 0 V R e fe r e n c e
17
Not Used
163
Voltage dividers divide monitor point voltages which are in
excess of 10 volts.
Examples are:
+15 volt Power Supply - divided by 2
-15 volt Power Supply - divided by 2
Focus T ranslator Power Mon - divided by 6
Rotation T ranslator Power Mon - divided by 6
164
3 .8
B in a ry M onitor Logic
A
number
of
logic
control of the Data Set.
clock
(C L K I-0 )
parallel
discrete
terms
are
monitored
under
The Data Set provides the standard
and strobe (S T R I-0 )
lines which fir s t cause a
load of the discretes into sh ift registers B16, B21 and
B26 and then serially unloads these data into the Data Set on
the serial data line ( D IG I- 0 ) .
The strobe, clock and data line
are address qualified by address 204g.
The reader is referred
to the Data Set Manual (V L A
Report 30) fo r a more
Technical
detailed exposition of binary monitor data logic and tim ing.
165
3 .9
Reset and Mode Control Logic
Mode control logic provides enable and reset terms to dis­
able or permit logic operations consistent with the settings of the
mode control switch on the fro n t panel.
S1
(on
in verters
CMP,
sheet
5)
and
its
associated
pull-ups
(B 10)
and
(B 24 ) provide enable terms fo r the four modes, i . e . ,
PR Focus,
Local,
and T ra ile r.
CMP on B24-1 is a reset
term which is OR‘d in C20-13 (sheet 4 ) with a power-on reset
from
com parator/resistor
B27-14
holds
all
B29 and
command
and
the
control
low tru e
reset term on
registers
flip -flo p s dc reset in any mode except computer.
and
control
The reader is
re fe rred to the reset term on sheets 1, 2, 3, and 4.
A ctivating
this switch during bench tests is a convenient way to clear the
controllers to the reset state.
166
(*tv
M il
m*m
9r
O W l^ t
99
FOC
brake del
IC
6
r-$ U J3-9
•
if
20
mm
Tf
H
no.i ,
S UB
*2 2 % ,
CrtP tNBL
........^ i 1" ^
/
<
Kf 1!}A
_
3
Hi
CM2
DO*- •
SHt
M
m
CL t R * FOC CM0
a :f
n
*8 *"
1
•v c n r
OSC/l C4TO».CO«WCTnCl# SYMBOL
L_!?f___J
824- t
/< ^
cotmicrro **<>
a *s r
#w o ro
rtcm*rm
Gcci/etx.'/
ne viseo ro/f rowfv
n p tu r r to Tmtoc
TPHttsmrotf
CO**£C TtO S ^ m w o
snion. osstt»Tff* ■*£
f
FOC DRIVE ACTIVE FF
mtc*™a*
etc**-
■>/»/"«
f
9tO&
TO TOC
H t lf » S F L09>c
^«H.8
FOC EXECUTION TIME f
JT DOWN LOGIC
ts
a
Jj j o. C04Q6Q
CT. 0. (>*■
v“
a t
«r* 5(K
£Biam nsLter o^ctLLATokC
^ W
WS I0 IO X
F2SSHI
i r-'K> " ‘rs*|10*W
62j : / ro **
"•OS)
r-H>V r -
FOCUS CMP CLK
%-,‘ K
ft
♦5V
® £ZL
*-
X iK
C.I7
7404
1 <r’ x
.*1
j&t&aua&L.
tm c ovr rm jtr
TOAiM.MO* WO0O
XFU5V
-d
t= £ =
•o
DO*
r so s x
v n t* a _
'5
-----------
0 07
& £ > **
l
TO.-,,,* [ g ]
J3-II
:.lMf
■CP40 CLOCK
O c w n fo t v o L T n z i
'lT c n 0 f» g i
~
CWO CIOCK r— 31
21
" " " ■ fr a
C CMP INPUT REG
♦s»
FOCUS SLEW CIK
f a* IOOMM
•0
n u r
e
013
C
74164
SV/OO &HIFT RGO
T>iL( i
■ w ig
« trf
r f| FOC COMMANO
^ STORAGE REGISTER
C no 3to
foc
D * t* £ c o n r m v o
C H O 3 3 0 fO C P F S fT COnmflPO
M<W
201
fo c
c r to *fftD6»CK
H ilS I
FOCUS CONTROL LOGIC/TIME-OUT LOGIC
NATIONAL RADIO
M 7
OtMCNStOMSANCININCMM
miMaHl MMUI*
ASTRONOMY
mwmatjamM
OBSERVATORY
i SS8S S
UNLESS O M t W t t t SMCIhfO
4. 3t l O lHtfW L. A/O Tr3 OH SH. IO
( 3 orv/cts tm $ - h m c s , Plu06£o into txstcm rso ptH/iocmrraM$
2. ©
NOT&S
C u r POWJE* CObtHlCTlOH, P M 6 HT 0 0 6
d ] • * t$ E T
is
TO FOCUS C
xr»i*
SH.2
DAC
j'
tpum we—u ijooi *
k.'
IKMMMU4JQ: *
MATtNtAL
P O w rfl ON a r * A AT t h P h o o i O ta s & K T c n o
rWOM 627-^4 |T^|
flfNM:
..h tr iftH r ...
I
I FOCUS/ROTATION
CONTROL
L06IC
IF ~
& (*!*
m m r
H r
DIAGRAM
an
8
7
6
r
J 3 -2 °
POT
r*2S
--- 1
««0 AOJj
B
fo c
m o
i
"W j
m * u s 5_
-IOOOO
1 ‘ UtSUL *■10.000
* 2 .4 4 1 *
FOC
CLRCMO
TO:020-0
&HJ
FOC CMO DAC DRIVE
-nmt
♦JSHWI
y rto
_____ -39.06
7740
..... - 7 d . m
7700
-IS* *3
-3/*.5
___ n o o .__
___«**>__
___ man
/
•v rM
© * J jii
Ji 1
-& oo o
J ftg g .
'TMTDQWCa/T.W
2
. +4.W28
____ 4.__
___ * ? 745_____
33
.....
... *Q. ....
♦ J9.0*
*0
40
.. * r e . v s ____
100
♦ »5fc.25____
_K»
_ .t 3 '2 - 5 ____
. 400 _ . ___ t625Q . . .
____ + »*5 0 :0 ._ .
♦ 2500
__gPW__
♦4W 5
.
___
__ 777* _... ____ r 4 .e e « _
V *
-9.763
__ ______ _____^J95J . .
7000
tab
FOC MON DATA BUFFER, A > L O
--VOWN
ITT70
i3
____ .->25
- mo
-tsoo
-Sood
ItK
r / FIT----- -tO#K
V UP
PIN W M 6 C R 3 OUTUOt » O W f f l f f f OTV/C£
W Hf}S*S
op»r-d
I
•nr-«
scrS
1 S
to"1
**
I„ ,/
}
FOCUS ANALOG CIRCUITRY
sncmio
M7
DiMCNStONSARCININCMfS
Z PIN NUMKM IN5HX XE*I9 AFfX* TOOAK BOfUfOCCU*+*/*OWDftHM*TOM
I. S>6N*l M t r i X -
*H.»
-
IT
S . ® - H R H O W lM t
4 © - c y r pews.* con * . * t : r o s o e , ra s -o & , f i % -* , « o -on, « * - / * , r * t - o e , r t + - *
J
j u IIU
c o * -o5
iMics's 4fHCftwtst
B
m .« w c ii
notes:
IfUnOtMMUIJOBD: ft
IHMCMttMJIJUB; ft
IFUCt *CWU(Jtt ft
[ t ] OtVICMS N tK • * * /C '* , A tfM C O INTO OMWWI1SO LO C A TtO */P*tS
MATCMAL
FINISH;
■■ffflftoT—
I
mm.it ±
{FOCUS/ROTATION
i
CONTROL
LOGIC DIAGRAM
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
STJK—
KHi----
msmtsw
te a . 2 era? D<3^ot4i
v*r*
ROT DRIVE ACTIVE FF
ROT BRAKE DEL
0
« J 3-29
)
CMP CWB*.
02+-Z
SH.S
TL
* & * — .^
a
fj7
Tall **>*•*>
s« 4
Cl£W/» ROT
CMO
y I
oaa
a>
c p !
s i
»**
I 3#
12
TO r o t r r r k c
ftX i.ftt$r tow c
JiV l
IT21
/B| 5»4
ROT
EXECUTION T IM E -0 * t
ncur
JT-DOWN LOGIC
♦5
O il- 4
017-n J
on-" fr.s.
oet i \
DH-U
-A8L—CMflfifl . **>
____ MfcTAGC MT COUHTC*/
OSCILLATOR-CMOS-
, fia
i| - o,3— .I*—o
ct ^
C T *0
ROT CMD CLK
1
« ],! *r*sncn.
*, 5K>HA
* - w i ! K S O h, , * . ---------------- 1jvrutf frin/L
i’<
.n*
7C4/T
04
U**<?4
---- y-L5^>J±
apt
SR.% P b l
GO*
clU II
52?
w sa
n
030
CMS ClACK
i» ic n «
030
CI K O - &
IS )
eoMM *Otr»*s
~LS~Z.9jt$
A mMOt
.
D iG O -0
T?
<B«31
Jy1xf637-»n.
1^1 »H7
1771015-a
frv —
tM-4
wear ffKfli
CMC 3?/ MOT Off/KT COHMRM0
CMD 331 POT RESET C o n m ttD
WON 203 ROT c rio RER06RCK
— cho ct
$/P06Hfn#f6
4a
I U M ctOcir
t 9 R m -n
»'»
1 4 5 t >?ti * IS
vd ^ 5 2
i 44 ui i n
tim
wmvr& m
fit* tun
roiT5VTR
\
ClK
<*W*
MCX LATCH
ST*0-g
0*5-5
SM-l
ise
0*2-1)
r.3,
worts s
i. Sig n a l w e n *
S
i««rr
> J||]
<M
02*
m
C l*
*■te s * r is pomfa on f c n p n o o e
W
l l U i i
M <N M M
888888
c
3. <£)arr pchc* com*. PtNbrt oh
5 X So N 2
curafro
* B t r - if , M - 4
M. O ••
^ --
CONTROL LOOC/TlMfrOUT LOGIC
a8388 8
TO ROT COM
QTWtlw^ sJtjWtfiT
04MENSa0Mi AM IN MCMM
mmmk win i
DAC
M7
iW M M W U U M i •
XCB0I
SH 4
l>uct MWII.MI *
iiu a in t|U i>
5 ] D ty/cfs m t t f H M re's p lu o g c o w ro o c m o im tko LOCvnaH/Ptm
MATCIHAi.
TSBST
BOSE
a
s
i F6CUs7ROTATrON
CONTROL
Logic DIAGRAM
PW TtQNAL RADIO
ASTRONOMY
OBSERVATORY
—
A
\s\
PRECISION REFERENCE
[fpfnr
^ SH.7
X E A 9M S
r
AOT MON DATA BUFFCR, A * 2 . 0
FH
.iv f
* I S ------ »
•-------?EROAOJJJ R4
* • a 15
19M 0M *
< J3-25
< 43-26
S T tC R CCW
TO: A n n a
1 0 3 -2 7 :
ROT CMO
1
i
♦
*o . ■ .
<*>
40
IC'D
p. v>
4'>:>
kt>0
,A 10
IV t
. //if'
, If f *
.
77 74 .
ff(>0
i; * o
ItQQ
7V0(J,...
7400
7000
woo
4000
TW O OWCOl/r.MV
♦ 2.4414
♦ «.e*29
♦•1 'kS
♦ /*»^3 .
. ♦ 35 '>»
7». 125
t Ii6.25
♦ ?i? 5
►
♦ IPSA.O
♦ j'.oo
'♦ 4^7.5 "
- ?.44I4
- 4 88?«
.- 3. 7fci
- /e./#>5
- 156.25
-3 (2 5
< & 3 *e
mpi rot cuo ty*
to: xedv-?o
SM.7
CLR CMO
T 0 ‘. 0KH» Cjt*os
.
.
-! 2 5 0
- lio o
* 5000
ROT CMO DAC D^tVE.
-«Wi
IM
>SfrW*/OMV
V CCW Fll-3
m
.
14J Dtwcjr is e-rtN ic PiuGGiD>tmj Dfs/cwflrro wcptioh/ phis .
!>rw) 1‘ hhi *i*t
4(O . ./r KmrHr,,HN AT: Fl5-O6,F3‘OB,FH-H,lriO-0*,ri8-4,Ftt-06tn -*
5
WW/K. O'II ju/ tLHO! Wte DTV/CF Nltn&PZ
* f',N
i*:.U4 x f « O I P£FFP TOG*Pt BOOBC COUMWf HOHDtSiMfiTMK
I S 'O r"* tf**'f IX - _Q_
! V C Cw
i thw , , •
[_ m•
0
T.5.
rVCW
^
aI
Laarj
r rI —
j»
V
ROTATION ANALOG CIRCUITRY
«ikhs (WWcHWiiFicifWol
MKNSIQNS ARC IN MCMCS
nMwwe* w in *
~
vor>; :
IfUCtMMUUHB; • ijE;
IKMtMCMUtMs t
I f*AHwwwu IM. *
ha VcriAt.
rmmT
3 03K
a a ra c
1
»y
\ FOCUS ROTATION
CONTROL (tauc
113 E Z H 3 1 IIZ C T I
A3
A28
>*
I
* .* u r
%
i .7 u r
j
i*
Jl
■—>
i*
£.
6 N I3 7
(TW? 7 * M )
ft
is ? *** L / «
•
® L
•»
AO* A
-o -v w 360a
(n w *
B S»
sL
J tt-
urrtn
LIM IHHnon
®
" 'f t P f B
A
nxii
iW S f & . d )
j i^
TPLH 5LfW
UP
1
a.
■ O V ^ -6 -
“ Mt
---- S B ^
ft
PF FOCUS
SlfW </*
foc
etme
mm &n
^ W ffla r ia
V
U AM 4
*
--- S-4Jt-gJMJA
T"W
‘
Q-*A>V— ■ <i
-o -w w >
SL
-O -V W -O 6.2 K
♦fcW
^
^
g r u t IWT
^ ; V 0
a
M^\tvrsov
m h w h
1
AO/ j
a .
■
(r
' (rvt* jalci)
_” 4-
1 A2# •
r —0 —
< J3H 5
f i.
THiH itfW
oowv
* /a
89 f
A* «C</$
3LiWOO*H
lOWUff 1 >MIT
R
M H m rr
&
n «o* 4
-O-^VVVO-
&
-o -^ w v -6 -
« AM
Q
"K
■
iU
J2.
f
L tiU -
L /* 1
< J3-I4
4 -4 -
At7gjj l
ISOL *5
H
tplr
yX
nm m
fu tm m
f i.
» 7 -i
6ft!
O il- I I
SH.7
—
y . v
B
n > M i f i * F tt
J&£_
f
m rtn
Loc*c common cut-a
Ffton: 090-OS
PH
LOC
6 0 7 -0 4
in *
tia ta .
g ] IK S T /U L
w it
D /P
HCAOC* A ?
<s uscp w » r #
T#)60O
TRMHSl ATOQ
WMEW TH/J
superior mcrtttc
CQ '/ * status s/cwts ro m *t*0 rmtUR
iH O K ftr o a s «s s h o v n
0
J
»0<? 7 0 * 0 <J)
m
i l s
S i
♦ 5V
( 3 O * V ic e s * * C B 't H i IC 'S PL U O tS O INTO O C V * N * T tO L O r a t t O N / P M S
I. SIGNAL PREFIX - X
NOTtSi
CW
a o r-H
s#.<
Rto-f*
SMC
ftl
« * - «
a».7
aw. 7
INTERFACE
9»
<71*
..lo r
OK
O
*.«*.»*■
4.7 UT
1
CW
H lO K
U H IHH HO*
m
I
Ji
CfSJ---- W 5 - JS------- 1a fSw?
S
1& i ----W S-*-------(do
0
J2
z'—
I
ewvr
CW
M w t $n
L *& S Z r 0
Lr
e & l / 'S T f B
< JJ-J4
< J J -M
twr mm*
mm* o*<tt
lOh9 M
~
Pth0\J
ko)rofuvi'fiCTtve
JI
. „
5rt#f
WW
FF I B .
arm
HH nr
■ud
n
[ 5 ] I v s T ALL DIP H E *D £ R A 9 W H £ N T H IS
WITH
TNI 6 0 0 TR AN SLATO R
U N IT
IS
0
DEWCCS
8
.
OtMCNStOMS A M Ml INCM U
nuM cn •« » t
"
kxrtitiAl RADIO
ASTRONOMY
OBSERVATORY
- " r
M7
lAMUMMW ink *
IN M t a M W IJ * *
j
i n»tt wannim
-Ptri IC 'S PlM&OCDItlTOIXSlSHGTtDUXtmON/PtNS
m
FOCUS/ROTATION
CONTROL (m* *
t. (§ )* cur ro+n* coNtJ. n r: Hoi-t6
t. s i g n h l w e r m
CONTROL/NHlBlT WTtWWCE
O lN^lw lnClWtbr
i
i
USED
G O ? / * STATUS S /G W H 3 TO M 6«rtO W HILE* tHOICRTO**> f& S h o t**
ROTATION
t
- f
222E
—c a z r T?.)r* i : x
o i m c r x B c m 11
SUB MUX ADORESS DRIVERS
J!
rv«r-j
wo*
f H > “r
I
^-VVV*
ANALOG m on
data in .
JM L
♦•5*
f/tttt CH*HN£LS H ' l \ )
■+5V
«0H|
suit-1
E*JT7
tSfl (BIT I)
noNilo*
♦5*
•3
SIXTUS BIN MON WOTO « MUX 204
roc!HOT
Tfwmmitm
«f}l-3
I
BINARY MON DATA INPUT
... SHIFT REGISTER
X£CJ7
r.s
xgfta?
MOJ7
•Z‘
•+9t
iw r »
o
I....
aI
**nt.oe
rw
—1
.
I
«?•
Ir
£°«-/f
+IQY w
«Or£MM VOi-T.
p$nc#
r a j'S r - ^ g s * ... &-*vv4CMD/MON SMA OECOOER
r 7^ 5TC..
!___ _ _ tfi _
030*I0~
fSV
___ !
0030-8
X D*ft 6M>
r«-» „JBT PM g
i
f
tHW
*
E^rgo-jo „£te.f2Lm j*±
F /* C/W/r)QV fi$S>G*Mfrr T»Bl£
qp&i m
320
fitm e n t*
n o r Otfivr cmp
3J?/
203
204
330
33/
foc cno
5*
—21 4*
. henriM, j „ ./mciwH.
fOCUSDRIVE CHS
f02
i__24
_ 1 L 3*
[ g l^ io
-w m iw xnsti ___ ;
__ 2lj
2*
B
b ft& z fli
RNRLOO
m t
fV
JO I ♦
UJ
ROTCfCHOOtRCK
Bin monitorno
♦sv
roc * e s tr c n o
030-*-
»sy tocic pwp
rotwrsgr cwp
.__19.
-V
CM>
0+
(tfUXCHRNNCLt O'T})
ISOL
*SV
(M l)
000
oot
004
oo*
OlO
012
014
OM
A /* RNRLOG mqh psshmmchts
MONITOR
Hot, l TOR
« nm
*SV UXilC PWR
00* ISOlRTEO *5 VPS
-iw fo r fxci t
003 *HV PWR
-I3VPWR
j OOS QROUM0
roc POSITION
007 m r position
Oil ROT CMO DRC
foc choopc
FOC CRROR VOLT ' 013 POT tPROR VOIT
poc x i rtop « • * OtS ROT XLRTOR MON
017
*tON PPK Rtf Pi
&
+/B
•*» **1
4 - M iU — j
— I
-4-45U*
^
monitor look i tumoo H utrtPttxim
tfcU«4 Wjk wjritt sKdwffi
M7
n
wore :
i. s/cnul i*rm "0*
0 JUTCJ7*#
mSTESmT
ro» w m t u t r oomisrMNcr w w ja w s ? { hc d st
[7) o c t * l » a o M i t f i s*o»w*
IBBQSl
SB
E
E
NATIONAL RADIO
, >MY
ttOHY
*/# co v rao t
UW/C DUWMH
h t
i^ x a — r r r - T T s n
8
7
6
I
d n a m
[~ 7 im p
I msm
m
c n n i
K F*fQ,CQy7ttX /»W>
CM
- < J3-J3
10
jeiSS?iStnM t -
o ft-a
- tH.I ^
fif©
roc torn? geherhtoa
•15 »*2
©
4* 14
cut
Mtrp A07S20 OAC
J aJI
• I St
*n **a
v -i
©
a rt
TcPi
T
j&J
v z « iif
Cur
^
if e n
W SsBk
f M
O
- »m»
300a
9H"
ife
W“
re*
%%
c r ’ 0*
<C4
5. 3»K
c4
8«f
! £♦
H
*n
£♦
II------u ------- ---------
&
ftD
■V
B
ytx p*0Jttr
[£> MMtrML
, om?«m fti K m t / t r s e t t e r a s s is tn t t c t
U> PfiOOuCF Si t t O H f OUTPUTFAOM C IS *J
MkMAlkAOtO
vm m t
% W » » M il *
© cur *mwo*x c>2-a*<6 , c * -»
a a « a H U L.
TC ttti.
IMfCI
SIGNAL PREFIX - H
SSSBf
n
wm
m
m
W
E S .
ASTROfiOMY
OBSERVATORY
M7
FOCUS/flCHATWN
COWTHOL
u>4tc oimmi
»~ ri ^ r :*K im m za a
W-** m
T 1f
i
i
r
WiiIM m«<■! m9
(HE&M
JB B nU H H L^
M S. U
is r
j w r o w f ^w ffw caa.
Ii, .
...j L r - - Jf r L
Cl?
M>7 5 2 0 DAC
P C C S L/O iC tL
_yW F
DrC)SfO*T
cstnessmBk
^
tS_______
IV U
^
* n S n h h W i.
— \m
9
-** cur cj*
*pc■*II......B
-
a
2HUtiL m »
r*< n» E jflK vc flU -tc fe
T >
rat
a_
fC * -
l »
I M l,
Cl*
a*
a
t y
I
#.T
s
t r i—
OL
r»|c
«{*
r
3
0
1=
vt4
[&
^
rmojwet
a o m m . vm .Mr, o m m m m t o m m s t u e r m $ t s r m * c r mmuc t o
M7
mooocc* tioH+oumrrtm>* cts*3
OCurmrrwiMK cr»-6,c*t-*,cv-»
SIGNAL PREFIX - I
mmiIh
po c u a /iw w cN
OGWfttDL
8______ J______ 7______ I
.
6
......
in
......
4
i ■'■ ■ ■ ...■■■■■»
H
3
I
.....................
n~ — «■ ■■.■■ ■J
............ .
2
11
m f r . 'T i r : r ; n
* i*
I
t t
jr. S »
K
1
I.,
J ^ H
l
1.
s s M wn for
TfCSSlCAL
s s rs s r* * '
____
0
MOTS (S
*> J 1
L O e iC A ftS V 'A *
r
o*
r
V
SGRPO
~o
c
*&
«2i
15
•26
*&
C.NOO
lS30
GROUND
XWQSHft
KW -4
—I5M •
■-15AMI#
m
0
< )
FRAMi
o
o
*•» WM
W W flT
GND U *
9&LCCT0R
■ T -4 ^
ta
MOTESt
I.0 H 4 C N C A T C 9
W IR fc
*.$) HOOICATCa Wtttt POWER OtSTniBUTlOM,
*3ow>Rc w<%Ar, MAcMiMe wiR.iN>a.
Q J» IS A S O - f t M M O t H J C t V S /W C O N N E C T O R
w it h
C A v r r t C # f o r p o w c k c r i m p p »n * .
M T
tM H K * • » *
IM IN W M * *
IM IIM U u » *
nSPBBU aa
T O C U S ^ T A T IO N '
CO NTRO L
<.0l»c
■inn.ii
DMM***)
PKn
i
I
4 .0
MODULE ALIGNMENT PROCEDURE
The
following
alignment
procedure
is
ordered
in
the
natural
dependence order of the logic and analog c irc u itry and has been used
many times in checkout and alignment.
Adherence to this procedure
is vital for alignment w ork, for troubleshooting it is also useful if the
problem area is not immediately evident.
The logical portions of this
procedure may be followed without undue care but the analog portions
are
critical
and
analog DMM's.
must
be
performed
carefully
with
high
precision
The HP3445A (6^ dig it DMM) and Data Precision 245
d ig it DMM) are specifically recommended with the HP instrument
p re fe rre d .
Care in usage of these is recommended though and p re ­
cise
measurements should always be referenced to the front
analog
panel analog ground; J3-37.
When it is desired to monitor the performance of the F/R Control
unit in the antenna in the closed loop mode never measure the loop
e rro r voltages at J3-4 and 24 or pot b u ffer input or output voltages
at J3-1 and 2 or J3-21 and 22 until after the commanded motion has
been completed.
currents
can
The reason for this admonition is that the DMM bias
influence
the
loop operation.
A fter
the
command
is
completed it is perfectly safe to measure the voltage at these points.
Calibration
data
from
this
alignment
procedure
should
be
re ­
corded on the M7 Test Data Form and placed in the Module Service
File with the service record.
A sample M7 Test Data Form (F ig u re 5)
is attached to this alignment procedure.
177
MODULE M7 F/R CONTROL MODEL B
Bench Alignment Procedure
1.
Mode enables
Check mode enables:
comp pr focus, local and tra ile r at:
B24-2, 10, 4, 6
Check power on reset at:
Check reset at:
C20-13
D20-15, 1; D02-1, 15; D14-11, D13-11,
D10-1, D 9 -1 , D29-11, D27-11, D 24-1, D23-1
2.
Channel enables
Check submux lines at:
B27-2, 4, 6, and 10
Check channel enables
3.
320g at:
EG37-1
321 g at:
EG37-2
330g at:
EG37-9
331 g at:
EG37-10
240g at:
EG37-5
Command loading
Input commands with addresses 320g and 321g (one at a tim e),
single-shot command (in comp mode)
V e rify control FF's are set by command:
Foe (320g) at:
D20-11
Rot (321g) at:
D20-5
Check brake delay one shots (~300 psec)
Foe
at:
D12-6
Rot
at:
D18-6
V e rify
that drive enable FF's are set by trailin g edge of brake
delay
Foe
at:
D02-5
Rot
at:
D02-11
V e rify
that
the
four
control
flip-flop s
can be reset when the
mode switch is moved from the cmd mode
V e rify ace control flip-flop s are initialized by cmd inputs
178
Check foe acc at:
C 9-5, 10
Check rot acc at:
C 19-5, 10
Check cmd storage register states
Foe cmd storage reg. at:
D10 and D09
Rot cmd storage reg. at:
D24, D23
Command states to be checked:
4.
0000
1000
7777
0001
2000
0002
3777 ( 2 11-1 )
6000
7776
4000
2 11
7774
0004
7770
0010
7760
0020
7740
0040
7700
0100
7600
0200
7400
0400
7000
Command tim e-out logic
Input foe command, check:
foe time-out clock = 55 Hz at B30-11
Check that tim e-out ~150 sec at B5-11
Check that focus reset command (330g) clears D02-5 and D20-11
V e rify that focus commands (320g) clears B5-11
Input rot command, check:
Rot tim e-out clock = 55 Hz at B25-11
Check that time-out ~150 seo at B5-5
Check
that rot reset command (331 g) clears
D02-11
and
D20-5
V e rify that rot commands (321g) clears B05-5
5.
6.
Slew clocks, (100 Hz nom)
Check foe slew clock at:
D06-7
Check rot slew clock at:
D16-7
+10 ref supply
Check
LM299H
precision
Check
+10
at F3-10,
1 /2 /1 5
ref
after
reference
v erifyin g
at
F5-6 for +6.9±.100 volts
adjust to +10.000 volts with
that
it
can
over the range of +9.995 to +10.005
179
be adjusted
pot F2-
(a t
least)
7.
-10 volt pot excitation power supply
With +10 volt re f supply set at +10.000 adjust pot F 2 -3 /4 /1 3 to
produce -10.000 volts at F5-10
V e rify that F5-10 can be set over the range of -9.995 to -10.005
volts
8.
Pot b u ffer offset null
Foc pot b u ffe r Adjust
F25-7
F 23 -7 /9 /1 0
and 10 -
to
produce
0.000±0.0005
volts
between
use a Data Precision meter in battery mode
only
Rot pot b u ffe r Adjust
F 13 -7 /9 /1 0
to
produce
0.000±0.0005
volts
between
F15-7 and 10
9.
Data b u ffe r output
Foc data b u ffe r With a 20 k helipot connected to J2-CC and EE (R D o ut) and
J2-Y and AA (e x c ) adjust:
a -
F 23 -1 /2 /1 5
to
produce
-10.000
at
F20-10 (J 3 -5 )
with pot set at zero volts (zero set)
b -
F 23 -3 /4 /1 3
to
produce
+10.000
at
F20-10 (J 3 -5 )
with pot set at -10.000 (J 3 -2 ) (gain set)
c -
Repeat a and
b above
if
necessary to produce
+10.000 and -10.000 at J3-5
d -
V e rify
that the +10.000 and -10.000 volts above
may be set over a range of (a t least) ±0.010 volts
from
the
+ and
-10.000
points
by
independent
adjustment of the gain and zero adjustments above
Rot data b u ffe r With a 20 k helipot connected to J2-DD and FF (R D o ut) and
J2Z and BB (e x c ) adjust:
a -
F 13-1/2/15
to produce
-10.000 at F10-10 (J 3 -2 5 )
with pot set at zero volts (zero set)
b -
F 13-3/4/13
to produce +10.000 at F10-10 with pot
set at -10.000 volts (J 3 -2 2 ) (gain set)
180
c -
Repeat a and b if necessary to produce +10.000
and -10.000 at J3-25
d -
V e rify
that the +10.000 and -10.000 volts above
may be set over a range of (a t least) ±0.010 volts
from
the
+10.000
and
-10.000
points
by
inde­
pendent adjustment of the gain and zero adjust­
ments above
10.
Comparator reference adjustment
Foe re f Set
F 1 7 -7 /9 /1 0
and
1 /2 /1 5
to
+0.010
and
-0.010
±5 mV
respectively
Rot re f Set F 7 -7 /9 /1 0 and 1 /2 /1 5 to +0.010 and -0.010 ±5 mV res­
pectively
11.
Foe and Rot DAC output test
Check
DAC
outputs
CMD
at
J3-3
and
23 for
the
Theoretical DAC Output
0000
0 .0 0 0
1
+2.4414 mV
2
+4.8828
4
+9.765
10
+19.53
20
+39.06
40
+78.125
100
+156.25
200
+312.5
400
+625.0
1000
+1250.0
2000
+2500.0
3777
+4997.5
181
following states:
CMD
12.
Theoretical DAC Output
7777
-2.4414
7776
-4.8828
7774
-9.765
7770
-19.53
7760
-39.06
7740
-78.125
7700
-156.25
7600
-312.5
7400
-625.0
7000
-1250.0
6000
-2500.0
4000
-5000.0
Acceleration logic ramp clocks
V e rify that acc clocks are ~250 Hz at C10-3 and C25-3
Trim C 24-2/15 and C 4-2/15 (nom 39 k) if necessary
13.
Acceleration logic comparators
Foe cmd:
Set C 2 -1 /2 /1 5 and 3 /4 /1 3 to +800 and -800 mV respectively
Rot cmd:
Set C 2 6 -1 /2 /1 5 and 3 /4 /1 3 to +800 and -800 mV respectively
14.
Acceleration logic DAC reference
V e rify that the DAC re f of — 2 .5 V is correct at:
Foe - C15-7
Rot - C30-7
15.
Command e rro r voltage tests
With a command of 0000 set in the foe and rot DAC's va ry the
foe and rot readout pots around -5 .0 0 volts and v e rify that the
command e rro r voltages at J3-4 and J3-24 are bipolar and are
limited by the feedback diodes.
F I5-14 and
The
The gain of the e rro r amplifiers
F25-14 should be ~50 with
in p u t/o u tp u t
e rro r
small e rro r differences.
voltage characteristics should
Figure 4.
182
resemble
16.
E rror comparator tests
Repeat the setup of 15 and v e rify the proper operation of the
precision comparators.
The comparators produce a T T L output
for the three states of the input e rro r signals.
The comparator
output should be:
Rot & Foc E rror Volts
17.
F16-11
Foc
F21-11
Rot
F6-11
F11-11
V err>+.010
Low
Low
Low
Low
+ .010>V err8- .010
High
Low
High
Low
V e rr< -0 .0 1 0
High
High
High
High
Command clock adjustments
The acceleration logic compares the e rro r signal with the + and
references.
If
|V e r r |
is greater than + or -800 mV the acceler­
ation logic causes the command clocks to be ramped up to a rate
~10 times the s ta rt-u p
(o r nonaccelerated
ra te ).
If
|V e rr |
is
less than + and -800 mV the command clock is not altered.
In
Foc State
Cont Volts @J3-16
Nonaccel
+4.800
C 2-5/6/11
Accel
+1.40
C 2 -7 /9 /1 0
the
accelerated
~500 Hz at D06-3.
In
state
adjust
Adjustment
pot
D01-1 /2 /1 5
Cont Volts @J3-36
Adjustment
Nonaccel
+4.900
C 26-5/6/11
Accel
+1.40
C 26 -7 /9 /1 0
accelerated
~500 Hz at D16-3.
V e rify
the
produce
The nonaccel clock rate will be about 55 Hz.
Rot State
the
to
state
adjust
pot
D 01 -3 /4 /1 3
to
produce
The nonaccel clock rate will be about 55 Hz.
ramp-up and ramp-down of the command clocks by
observing the clock rate as commands are set in with the e rro r
voltage
set to the three states ( i . e . ,
183
>+800,
+800>error volts>
-800 and -800>).
plished,
With a command set in and ramp-up accom­
ramp-down
should be initiated
when the e rro r voltage
falls back within the + and -800 mV bounds.
The ramp-up and
ramp-down time should both be ~1 second.
18.
Command shut down
Input single-shot commands are 320g and 321g with the controller
in the comp (com puter) mode.
Adjust the foc and rot position
pots to reduce the e rro r voltages to zero (monitor test points
J3-4
and
command
24 with
control
a Data Precision DMM)
flip -flo p s
are
reset
and
by
the
v e rify , that
comparison
the
logic
within the ±.010 volt setting of the comparators (set in para­
graph 10).
The control flip -flo p s and test points are:
Foc: D20-11, J3-9; D 02-5, J3-8
Rot: D20-5, J3-29; D02-11, J3-28
19.
Output translator d riv e , manual mode
V e rify
that both foc and rot slew clocks are present at A10-12
(J 3 -1 2 , foc) and D21-12 (J 3 -3 2 ,
be approximately
100 Hz
r o t).
These clocks should
with a pulse width of ~50 psec.
Set the fro n t panel control switch to "manual".
With a ground
at A25-13 (to simulate foc brake voltage detection) v e rify
the presence of focus translator drive clocks at J3-15 and
J3-14
when
grounded.
50-psec
either
(b u t
not
both)
J1-C
and
J1-D
are
The output signal should switch to ground for a
pulse
duration
as
long
as
A25-13
is grounded.
With a ground at A25-3 (to simulate rot brake voltage detection)
v e rify
the presence of rot translator d rive clocks at J3-34
and J3-35 when either J1-E or J1-F is grounded.
20.
Output translator d riv e , prime focus and tra ile r mode
With the fro n t panel switch set to the tra ile r and prime focus
positions and grounds at A25-3 and A25-13 v e rify the presence
of
translator
drive
pulses
as
in
Test
19 when
currents
are
injected into the prime focus and tra ile r opto-isolators from a +5
volt
source
and J1-R
which
(ISO L
is g r o u n d
+5 re tu rn ).
referenced
to J 1 - X
(trailer
return)
The +5 volt injection points are:
184
21.
UP
Foe
DOWN
CW
Rot
CCW
T railer
J 1-T
J1 -|j
J1-V
J1-W
Prime Focus
J2-L
J2-P
J2-T
J2-W
O utput translator d riv e computer mode
With grounds at A25-13 and A25-3 and the fro n t panel switch
set to comp v e rify
the presence of translator drive clocks
at J3-14 and J3-15 (focus) and J3-34 and J3-35 (ro ta tio n )
when these commands are active
V e rify that the clocks are enabled only when a command is active
(see Test 18 for command shut down tests)
22.
Brake voltage detection
Apply
approximately
+70 volts
dc
to J2-L
and
J2-T
with the
power supply retu rn connected to J2-U and J2-N
V e rify
V)
that the optical isolator A12-14 and A22-10 are low (~.1
with
the
voltage
applied
and
~+5 volts
when
the +70
volts is removed
V e rify
that the following indicator drives are active (low ) and
able to sink c u rren t to ground from a +5 source:
Brake
Indications
Foe
J1-J (local)
J1-AA (tr a ile r )
Rot
J1-M (local)
J1-DD (tr a ile r )
23.
Foe and Rot limit switch tests
Apply +5 volts dc to the following points to v e rify the correct
detection of limit switch actuation
Reference the 5 volts to the ISOL +5 volt re tu rn , J1-H
V e rify
that the translator drive clocks are inhibited
(see Test
22) when any of the switch sense inputs are activated
V e rify
that the indicator drive outputs
185
listed
below are active
low (th e y must sink a c u rren t to be v e rifie d )
Limit SW Inputs
Foe
Indications
J 2 -K , UL
J1-J, (local)
J 1 -Y , (tr a ile r )
J 2 -R , LL
J1-H , (local)
J 1 -Z , (tr a ile r )
Rot
J2-S , CW
J 1 -K , (local)
J1-B B , (tr a ile r )
J 2 -X , CCW
J1-M, (local)
J1-C C , (tr a ile r )
24.
Brake drive
With the fro n t panel switch in the
TRLR
positions
and local,
respectively
CMD,
v e rify
PRFOC,
that
active
LOC, and
commands
PRFOC and tra ile r slew commands will generate
brake drive commands
See Tests 22 and 20 - the drive is a (active low) cu rren t sink
d rive through an external optically coupled solid state relay
so a series resistor or the relay must be present to v e rify
the drive
The drive test points are:
25.
Foe
J3-13
Rot
J3-33
Analog monitor output
Inject a set of 16 state codes on the four submux address lines
and
monitor
the analog m ultiplexer outputs on J3-19 (H i)
and J3-18 (L o ) with a DMM
The (low tru e ) submux address inputs are:
SMA-0
(" 1 " )
J1-Y
SMA-1
(" 2 " )
J1-Z
SMA-2
(" 4 " )
J1-A
SMA-3
(" 8 " )
J1-B
The hex addresses and data values should be as follows:
186
Addrg
26.
Parameter
0
+5 volt Logic Power
1
+5 volt Isolated Supply
2
-10 volt Pot Excitation
3
+15 volt PS Mon
4
-15 volt PS Mon
5
Analog Ground
6
Focus Position Readout
7
Rotation Position Readout
10
Focus Command DAC Output
11
Rotation Command DAC O utput
12
Focus Command E rror Det Output
13
Rotation Command E rror Det Output
14
Focus Trans Power Mon, ~+2.5 V
15
Rotation Trans Power Mon, ~+2.5 V
16
SACRED+10 volt Reference
17
Not Used
B inary status monitor
With a Data Set (o r functional equivalent)
controller
binary
monitor
(D IG 0
set)
set to stimulate the
output
with
a MUX
address of 204g v e rify th at the serial monitor data stream
properly verifies the following discrete states:
Foc Function
Bit #
Foc Command Active
0 (L S B )
Foc UL Switch Actuated
1
Foc LL Switch Actuated
2
Foc Brake [s Released
3
Foc Function
Bit #
Foc Brake is Commanded
4
Foc Slew is Active
5
Foc Command Tim e-Out
6
Not Used (reads out 1)
7
187
Rot Function
B it #
Rot Command Active
8
Rot CW Switch Actuated
9
Rot CCW Switch Actuated
10
Rot Brake [s Released
11
Rot Brake is Commanded
12
Rot Slew is Active
13
Rot Command Tim e-O ut
14
Not Used (reads out 1)
15
Mode Info
27.
Bit #
Front Panel Switch Set to Cmp
16
Front Panel Switch Set to PF
17
Front Panel Switch Set to Local
18
Front Panel Switch Set to T ra ile r
19
Not Used (reads out 1)
20
Not Used (reads out 1)
21
Not Used (reads out 1)
22
Not Used (reads out 1)
23
5 MHz clock
V e rify the presence of the 5-MHz clock at J1-FF (H i) and J1-HH
(L o )
Use a 130-Q
The
5-MHz
resistor
shunted
by a 30-pF capacitor as a load
clock should be clean,
glitch
fre e ,
ground and about 1.5 volts peak-to-peak
188
balanced about
F/6. 4
ERROR DETECTORTRANSFERCHARACTERISTICS
189
M7 T E S T DATA
SERIAL NO._____ ANT__
Te=t ?rocseer's D a —1—2504/9
CALIB DATE___________
PERFORMED BY________
MOD 3/CHAN C-Z3/NO'
BENCH TEST_______ ___
ANT TEST ___________ _
Sheet 1/4
Test Power Supply Vclt_=res:
+15 v =________________
-15 v =________________
+5 v =_________________
+5Isol =_______________
GND Reference - 3 2 - 2 !.
All analog voltage measurements made with HP 3445A DMM
exceot where noted.
TEST POINT
( FOC, ROT )
TEST PARAMETER
FOC
VALUE
ROT
VALUE
NOMINAL
VALUE
REFERENCE VOLTAGES
LM299H OUTPUT
(F5-6)
+ 6.9 ±0.2v
+10V REF SUPPLY
(F3-10)
+10.OOOv
-10V POT EXCIT SUPPLY
(J3-20)
-10.OOOv
+ .OOlv
+ . OOlv
SLEW CLOCK PEPFOP-MANCE
CJ3-12, J3-32)
SLEW CLOCK FREQUENCY
PULSE WIDTH
100HZ typ
50us ±10us
TIME-OUT LOGIC
( 320-9, B25-9 )
TIME-OUT CLOCK FP30
TIME-OUT DURATION
55HZ typ
150sec typ
POT BUFFER OFFSET
NOTE:
E.
Measure voltage between
(J3-l,2), (J3-21,22)
Buffer Input & Output
with Data Precision 245
in Battery Mode, IV Range
Adjust so that |v off set | <2mv
(F23-9)---ADJ---(F13-9)
V offset
DATA BUFFER GAIN 5 ZERO
DATA BUFFER LINEARITY
SET POT INPUT TO
OFFSET ADJ
(J3-5, J3-25)
O.OOOv
-10.OOOV
-10.OOOv
+•10. OOOV
- 5.OOOv
O.OOOV
OFFSET ERROR, MV
E <_ 5MV
GAIN ERROR, MV
E < 5MV
(F22-1, F13-1) FIGURE 5 (Sheet 1)
SH 2 /4
+10 RZT =
(F3-10)
D.-.C THZO
CCTr'JT, 2-Tv
0003
0-000
0001
+2.4414
+4.3523
+9.765
2
£.
0010
20
40
100
200
400
1000
2000
3777
FOC DAC
OUTPUT
FOC DAC
ACT-THEO
+19.53
+39.05
+73.125
+155.25
+312.5
+525.0
+1250
+2500
+4997.5
7777
7776
7774
7770
-4.8323
— 9.765
— 19.53
7760
7740
7700
-39.06
-73.125
-156.25
7600
7400
7000
-312.5
— 625.0
-1250.0
6000
4003
-2503
-5000
AVZR---3Z ERROR, XV
FIGURE 5 (Sheet 2)
191
ROT DAC
OUTPUT
ROT DAC
ACT-THEO
SH 3 /4
FOC
VALUE
ROT
VALUE
NQMIUP
VALUI
ERROR O'? —Vref
(F17-13, F7-13)
+10mv
ERROR CM? -Vref
(F17-12, F7-12)
-lCtav
c m p —l s w i t c h p o i n t s
(Flo-11, F6-11)
:rcaching OV
L to n 7 “V
err
K to L; - V _ _ la*:Ting CV to +V
CMP-2 SWITCH POINTS
H to L; -V
err
L to E; -V
:c z l z ?a t i o >:
+ 10mv tyr
+ 20mv t M
(F2I-11, Fll-11)
arc:rcaching OV
-lea. ing OV to -V
-lOmv t M
- 20mv ty?
logic performance
BRAKE DELAY ONE SHOT
ACCEL COMPARATOR
ACCEL DAC -V
_
ran
ACCEL LOGIC CLOCKS
(D12-6, D18-6)
300ms
K
^
(C2-1, C26-1)
+800rav
^
(C2-3, C26-3)
-800niv
(Cl5-7, C30-7)
-3.Dv ±1
(Cl0-3, C25-3)
DZCEL states
:v±ng by setting
bozh input POTS at —ii.OOV. The
DECEL state obtained by inserting a
comand vord of CCOQ (MCZ 320 & 321)
and cr.s ACl-.Ij.li sta~e by
i
inserting
:crr;and words of 2CO!0 and 4000,
checking both accal
I
250KZ t^
±50hz
I
C O CLX CONTROL VCLT
(J3-16, J3-36)
OED CLOCK FREQUENCY
(J3-11, J3-31)
55HZ
f
CMD CLK CONTROL VOLT
(J3-16, J3-36)
+1.40V
CMD CLOCK FREQUENCY
(J3-11, J3-31)
500HZ tyr
X
+4.800v :
ACCELERATED STATE
+ 0 0 , -J
APPROX. SLEW TIME TO ACCELERATE
1 sec
TO DECELERATE
l
1 sec t-
FIGURE 5 (Sheet 3)
192
SH 4/4
+ (J3-19)
LOC-
'7NZL ttZZrSSS.
0
2
2
3
4
5
6
7
10
11
12
13
14
15
16
17
- (J3-18) or GROUND
VALUE
PARAMETER
+3 Logic PS
ISOL +5 PS
-1CT7 Pot Exc PS
+15V PS/2
-15V PS/2
Analog GND
FOCUS POS
ROT POS
FOC DAC OUTPUT
ROT DAC OUTPUT
FOC ERROR VOLTS
ROT ERROR VOLTS
FOC TRANS MON
FOC TRANS MON
SACRED +10 REF
NOT USED
ACTUAL
+5.00
+5.00
-1 0 -0 0 0
+7.50
-7.50
0.000
J3-5 Value
J3-25 Value
J3-3 Value _
J3-23 Value
J3-4 Value
J3-24 Value ___
+. 8V (5V input)
+.8 (5V input)__
+10.000
icord values frcn Sheet 1 .
DCS Z07 Box, H*:I 2iCD 0 in MON mode to select above address; record value.
FIGURE 5 (Sheet 4)
193
5 .0
I/O AND TEST POINT SIGNAL PIN ASSIGNMENTS
Figure 6 depicts the fro n t panel test connector signal pin as­
signments.
These points enable observation of the operation of the
controllers in situ for quick fa u lt diagnosis.
Figures 7 and 8 depict
the rear panel I/O connector pin signal assignments.
194
Signal
J3-P in
Foe Pot Wiper
Foe Pot B uffer Amp Out
Foe CMD DAC O utput
Foe CMD E rro r Volts
Foe Data B uffer Out
Foe CMD Steer UP
Foe CMD Steer DOWN
Foe CMD D rive En
Foe D rive Active
Foe CMD Exc Pulse
Foe CMD Clock
Foe Man Slew Clock
Foe Brake Rel CMD
Foe Trans D rive DOWN Pulses
Foe Trans D rive UP Pulses
Foe Acc Cont Volts
Bin Mon O utput
An MUX Data -O u t
An MUX Data +Out
Pot Exc Power Supply Mon
Rot Pot Wiper
Rot Pot B uffer Amp Out
Rot CMD DAC O utput
Rot CMD E rror Volts
Rot Data B u ffer Out
Rot CMD Steer CCW
Rot CMD Steer CW
Rot CMD D rive En
Rot D rive Active
Rot CMD Exc Pulse
Rot CMD Clock
Rot Man Slew Clock
Rot Brake Rel CMD
Rot Trans D rive CCW Pulses
Rot Trans D rive CW Pulses
Rot Acc Cont Volts
Analog Ground
FIGURE 6:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
FRONT PANEL (J 3 ) TEST POINT CONNECTOR SIGNALS
195
i_n
nJ
SINGLE WIDE MODULE
(REAR V I E W )
PIN
A
B
C
D
E
F
H
J
K
L
M
N
P
R
S
T
1 U
V
w
X
Y
z
a
b
c
*
FUNCTION
+ 15 VOLTS
GND
+ 5 VOLTS
± 15 Comm
-
15 VOLTS
ISOL +5
ISOL Comm
Foe UL Inc,Local
Foe Brake Drive
Rot Brake Drive
Foe Brake,+Source
Rot Brake, +Source
DIGI - 0
CLKI -0
STRI -0
CLKI - 0R
DIGO -0
CLKO -0
STRO -0
CLKO -0R
SMA -0 "1"
SMA -1 "2"
SMA -2 "4"
SMA
-
"8 "
Foe Slew U d - Local
PI
WIRE COLOR
RED
#26
BLK #16
ORN #16
BLK, #16
RED,#26
RED #26
RED #26
RED #26
RED #30
RED #30
RED #30
P IN
d
e
f
h
j
k
m
n
P
RED #30
RED #30
#30.Wh.Tw/wPin T
#30. RED
#30,Blk,Tw/wPinR
#30, RED
#30.WhTw/wPinX
#30, RED
#30,BlkTw/w PinV
#30, RED
#30, RED
#30, RED
#30. RED
#30. RED
INDICATES A FUNCTION NOT FOUND IN THIS MODULE
196
r
s
t
u
V
W
X
y
z
AA
BB
CC
DD
EE
FF
HH
( REAR V I E W )
FUNCTION
WIRE COLOR
For
Dwn-Lneal
#30,Red
#30,Red
Rot Slew CW-Local
Rot Slew CCW-Local
#30,Red
#30,Red
Foe LL Ind-Local
Foe Brk Enrgzd-Local
#30,Red
#30,Red
Rot CW Lim Ind-Local
#30,Red
Rot CCW Lim Ind-Local
#30,Red
Rot Brk Enrgzd-Local
ALGI - 0 +
#30,Wh,Tw/w Pin r
ALGI - 0 #30,Blk,Tw/w Pin j
ALGI - Gnd
3nd Lug
Foe Slew Up -Trlr
Foe Slew Dwn - Trlr
#30, RED
#30, RED
Rot Slew CW-Trlr
Rot Slew CCW-Trlr
Trlr Slew Return
Foe UL Ind.-Trlr
#30,
#30,
#30,
#30,
Foe LL Ind.-Trlr
Foe Brk Enrgzd -Trlr
Rot CW Ind.-Trlr
Rot CCW Ind.-Trlr
Rot Brk Enrgzd-Trlr
Ind. Return -Trlr
5 MHz- Siqnal
5 MHz - Return
#30, RED
#30, RED
#30, RED
#30, RED
#30, RED
#30, RED
# 30,W h ,Tw/wPinHH
# 30,Blk,Tw/wPinFF
FIGURE 7
RED
RED
RED
RED
P2
(REAR V I E W )
P2
FUNCTION
P IN
A Foe Trans Drv up-H
B Foe Trans Drv Dwn-Hi
C Foe Trans Drv Up -Ret
WIRE
COLOR
PIN
V
#30Wh.Tw/w PinC
W
#30 Wh,Tw/wPinD
#30Blk,Tw/w PinA X
FUNCTIO N
Rot
Rot
Rot
Foe
Brk Sense - PF Slew,CW
CCW Lim SW
Pot Exc - HI
WIRE
COL OR
#30. RED
#30, RED
#30, RED
#30 Wh,Tw/wPin AA
D
E
Foe Trans Drv Dwn-Ret
#30Blk,TW/wPin B
Rot Trans Drv CW -HI
#30Wh,Tw/w Pin H
F
H
Rot Trans Drv CCW-Hi
Rot Trans Drv CW -Ret
#30Wh, Tw/w PinJ AA
#30blk,Tw/w PinE BB
Foe Pot Exc -LO
Rot Pot Exc -LO
#30 Wh,Tw/wPin |f
#30Blk,Tw/wPin g
#30Blk,Tw/wPin Z
K
Rot Trans Drv CLW-Ret
Foe UL SW
#30Blk,Tw/w PinF CC
#30, RED
0D
Foe Pot R'Dout -HI
Rot Pot R'Dout-HI
#30Wh,Tw/w PinE®
#30wh,Tw/w PinFlB
L
M
N
Foe PF SIp.w Up
Foe Brk Sense- +
Foe Brk Sense - -
#30, RED
#30, RED
#30, RED
EE
FF
HH
Foe Pot R'Dout-LO
Rot Pot R'Dout -LO
Foe Trans Mon - HI
#30Blk,Tw/wPinCC
# 30Blk,Tw/wPinD^
#30, RED
■
P
R
S
T
U
Foe PF Slew Dwn
#30, RED
Foe LL SW
Rot CW Lim SW
Rot PF Slew CW
#30, RED
#30, RED
#30, RED
JJ
KK
LL
MM
Rot Trans Mon - HI
#30, RED
Foe R'Dout Shield
Rot Brk Sense - +
#30, RED
NN
Rot R'Dout Shield
GND Lug
GND Lug
V
(
FIGURE 8
197
Y
Z
Rot Pot Exc -HI
6 .0
SP EC IA L COMPONENT D A TA SHEETS
198
The LM199/LM299/LM399 are precision, temperature
stabilized monolithic zeners offering temperature
coefficients a factor of ten better than high quality
reference zeners. Constructed on a single monolithic
chip is a temperature stabilizer circuit and an active
reference zener. The active circuitry reduces the dynamic
impedance of the zener to about 0.512 and allows the
zener to operate over 0.5 mA to 10 mA current range
with essentially no change in voltag* or temperature
coefficient. Further, a new subsurface zener structure
gives low noise and excellent long term stability com
pared to ordinary monolithic zeners. The package is
supplied with a thermal shield to minimize heater powei
and improve temperature regulation.
calibration standards, precision voltage or current sources
or precision power supplies. Further in many cases the
LM199 can replace references in existing equipment
with a minimum of wiring changes
The LM199 series devices are packaged in a standard
hermetic T 0-46 package inside a thermal shield. The
LM199 is rated for operation from -5 5 ''C to + 125'”C
while the LM299 is rated for operation from -25°C to
♦85cC and the LM399 is rated from 0°C to +70°C
features
The LM199 series references are exceptionally easy to
use and free of the problems that are often experienced
with ordinary zeners. There is virtually no hysteresis in
reference voltage with temperature cycling. Also, the
LM199 is free of voltage shifts due to stress on the leads.
Finally, since the unit is temperature stabilized, warm up
time is fast
The LM199 can be used in almost any application in
place of ordinary zeners with improved performance.
Some ideal applications are analog to digital converters.
■
■
■
■
■
■
■
■
■
Guaranteed 0.0001 % tC temperature coefficient
Low dynamic impedance —0.512
Initial tolerance on breakdown voltage - 2%
Sharp breakdown at 400/jA
Wide operating current - 500^A to 10 mA
Wide supply range for temperature stabilizer
Guaranteed low noise
Low power for stabilization - 300 mW at 25°C
Long term stability — 20 ppm
schematic diagrams
R d t iM c t
connection diagram
fu n ctio n al block diagram
Metal Can Package
□
1 9 7 5 N « t io n « i S e m ic o n d u c t o r C o r o
□
B 1 5 M 8 S / P f m t « o in u S A .
199
/ c ci i a h
/g g y iA n
L M 1 9 9 /L M 2 9 9 /L M 3 9 9 precision reference
general description
u m s ia a id -g R g iA n
NATIONAL
.a a u s ja ia i
I t N l A I I V L D A T A A U G U ST 197b
OV to 20V P ow w Reference
LM199/LM299/LM399
precision reference
typical applications (con't)
B ipolar O u tp u t H ile n n c f
physical dim ensions
tu t
y'
io n
\ y T (Ml
T O -46 M etal Can Package (H I
O ld e r N um ber LM 1 9 9 H , L M 299H
o r LM 399H
T herm al Shield
(T O -46 Package I nude)
A ll U n its Shipped w ith T he rm al Shield
M09M2. 34}I0». V74C1. JM0M9 B U M JJHtM. B W 1 . M O *}
N a tio n a l S e m ic o n d u c to r C o rp o ra tio n
2900 Sem icond ucto r D "« « S v*la Clara . C a lifo rn ia 9S0S1. 14091 TU-SQ OO /TW t (910) 339*9240
N a tio n a l S e m ic o n d u c to r G mbH
906 F iM r tltn ltld b iu c h
ln d u l l " « l l r a i M 10. W att Germ any. T ela
109141} 1371/Tatai 0 V J f M 9
%
N a tio n a l S e m ic o n d u c to r (U K ) Ltd.
i a t i i i t i d ind ustrial fa ta l* . O iM n e c k . S cotla nd. T *!• (04751 33751/Taiat 771 4 3 2
Mft Ml
*»9
<0* *ff 9* •*? (•<{»’>’¥
M <••(»•! »lfM htfdrt •** i*»M( M HlhMI »m*W1 IM H|M •• *•»
200
*•
Ml#
absolute m axim um ratings
Temperature Stabilizer Voltage
Reverse Breakdown Current
Forward Current
Reference to Substrate Voltage V (RS) (Note 1)
Operating Temperature Range
LM199
LM299
LM399
Storage Temperature Range
Lead Temperature (Soldering. 10 seconds)
electrical ch aracteristics
PARAMETER
40V
20 mA
1 mA
440V
-0 .1 V
-5 5 c'C to +125‘'C
-25 °C to +85fcC
0cC to +70fcC
—55,'C to ♦150°C
300bC
(Note 2)
LM199/LM299
CONDITIONS
Reverse Breakdown Voltage
0.5 mA < 1r < 10 mA
Reverse Breakdown Voltage
Change With Current
MIN
6.8
TYP
LM399
MAX
6.95
7.1
0.5 mA < 1 < 10 mA
6
Reverse Dynamic Impedance
Ip » 1 mA
Reverse Breakdown
Temperature Coefficient
-55°C < TA < 85°C I
o "
o
f
LM199
85 C < TA < 125 C J
—25°C < TA < 85°C
0°C < TA < 70°C
f<
LM299
LM399
1 15
UI M
N II T C
7.3
V
6
12
mV
0.5
1
0.5
1.5
0.00003
00005
0.0001
0.0015
0.00003
0.0001
10 Hz <
Stabilized. 22°C < TA < 28°C.
1000 Hours. l R > l m A ±0.1%
20
Temperature Stabilizer
Supply Current
T a *■ 25°C. Still Air. Vs * 30V
T a - —55°C
8.5
22
Temperature Stabilizer
Supply Voltage (Note 3)
MAX
9
RMS Noise
7
9
Vs *= 30V. T a - 25°C
3
Initial Turn-on Current
9 < Vs < 40. T a = 25°C
140
%/°C
%/°c
0.00003
0.0002
7
50
20
14
28
85
9
15
40
140
%/° C
fiV
ppm
3
200
n
V °C
20
40
Warm-Up Time to 0.05%
6.6
TYP
6.95
Long Term Stability
10 kHz
MIN
mA
V
Seconds
200
mA
N o t* 1: The substrate is elec tric a lly connected to the negative te rm in a l o f th e tem p era ture stabilizer. The voltage th a t can be applied to either
te rm in a l o f th e reference is 4 0 V m ore positive o r 0.1 V m ore negative than th e substrate.
N ote 2: These specifications apply fo r 3 0 V applied to th e tem perature stabilizer and - 5 5 * 0 < T ^ < +12S°C fo r the L M 1 9 9 . - 2 5 ‘"C < T a < ♦85*'C
fo r the L M 2 9 9 and 0°C < T a < ♦70°C fo r the LM 399.
N ote 3: C A U T IO N , tf the device is operated fo r m ore than 6 0 seconds w ith heater supply voltage between 2 V and 9 V the heater tem perature c o n tro l
c irc u itry is n o t p ro p e rly biased and the device can rise to app roxim a tely ♦ 150° C.
201
typical performance characteristics
R»wm Characteristic*
R*mim VoltageChange
t ‘ *
f it VC R SI VO IT AG C (V)
»
DynamicInptdMM
11
•
M V IR S I CIM IUNT ta A l
im
n
m
fMQUIMCVIHt)
ZanarNotsaVoltage
1
«
FMfOUIMCV|M?)
I
17
If
-H -M-II S » 4S H IS 1H
TIMKRATIMCro
n
M IA T tftO M T M K - O i C )
InitialHaatarCurrant
RttpoiMTima
■
TIMM OM T lM H U T U M |*C>
>
«
•
I I I
II
U
li
II
m a B tC I
Low FraquencyNoneVoltage
IJl to<I<1Hr
STAIIliziO
CT, - M C I
3
202
typical applications
Ktngla S u p p ly O pa ta tio n
S p lit S u p p ly O pm a tion
’(1**11121II
N agativ* Haatar S u pply w ith
P m il in R t f iii n c *
B u tla ra d Rafaranca
W ith Singia Supply
Positive C u rrant Source
Standard C*M R c p ltc tm tn t
203
typical applications (con't)
NifttmCurrant&oum
PortablaCalibrator*
SquaraWavaVoltageRataranca
PrecisionClamp*
(MV ,
t «SV t
turn
5
mm a n a l o g
Lowest Cost
High Accuracy 1C Op Amps
i L i i d e v ic e s
FEATURES
Precision input Characteristics
Low V os: 0.5m V max (L)
Low V os D rift: 5jxV/°C max (L)
Low lb: 50nA max (L)
Low l os: 5nA max (L)
High CM RR : 90dB min (K , L)
High Output Capability
A 0 | = 25,000 m in, 1kO load (J, S)
Tmin *° Tmax
V Q = ± 1 0V min, 1kS2 load (J, S)
Low Cost (100 pieces)
A D741J
$ 1.25
A D 741K
$2.25
A D 741 L
$ 6.00
A D741S
$ 3 .3 0
GENERAL DESCRIPTION
The Analog Devices AD741J, AD741K, AD741L and AD741S
are specially tested and selected versions of the popular
AD741 operational amplifier. Improved processing and
additional electrical testing guarantee the user precision
performance at a very low cost. The AD741J, K and L
substantially increase overall accuracy over the standard
AD741C by providing maximum limits on offset voltage drift,
and significantly reducing the errors due to offset voltage, bias
current, offset current, voltage gain, power supply rejection,
and common mode rejection (see Error Analysis). For
example, the AD741L features maximum offset voltage drift
of 5#iV/°C, offset voltage of 0.5mV max, offset current of
5nA max, bias current of 50nA max, and a CMRR of 90dB
min. The AD741S offers guaranteed performance over the
extended temperature range of —55°C to +125°C, with max
offset voltage drift of 15/uV/°C, max offset voltage of 4mV,
max offset current of 25nA, and a minimum CMRR of 80dB.
HIGH OUTPUT CAPABILITY
Both the AD741J and AD741S offer the user the additional
advantages of high guaranteed output current and gain at low
values of load impedance. The AD741J guarantees a
minimum gain of 25,000, swinging ±10V into a lk£2 load
from 0°C to +70°C. The AD741S guarantees a minimum
gain of 25,000, swinging ±10V into a lk£2 load from —55°C
to +125°C.
All devices feature full short circuit protection, high gain, high
common mode range, and internal compensation. The
AD741J, K and L are specified for operation from 0°C to
+70°C, and are available in both the TO-99 and mini-DIP
GUARANTEED ACCURACY
The vastly improved performance of the AD741J, AD741K,
AD741L and AD741S provides the user with an ideal choice
when precision is needed and economy is a necessity. An
error budget is calculated for all versions of the AD 741 (see
page 3); it is obvious that these selected versions offer
substantial improvements over the industry-standard AD741C
and AD741. A typical circuit configuration (see Figure 1)
is assumed, and the various errors are computed using
maximum values over the full operating temperature range
of the devices. The results indicate a factor o f 8 improve­
ment in accuracy o f the AD741L over the AD741C, a
factor o f 5 improvement using the AD741K, and a factor
o f 2.5 improvement using the AD741J. The AD741S,
similarly, achieves a factor o f 3.5 improvement over the
standard AD741. Note that the total error has been
determined as a sum of component errors, while in actuality,
the total error will be much less. Also, while the circuit used
for the error analysis is only one of a multitude of possible
applications, it effectively demonstrates the great improve­
ment in overall 741 accuracy achievable at relatively low cost
with the AD741J, K, L or S.
10k11%
- g - 10.000V
Figure 1. Error Budget Analysis Circuit
packages. T he A D 74 1 S is specified for operation from
-55°C to +125°C, and is available in the TO-99 package.
In fo r m a tio n fu rn ish ed b y A n a lo g D evices is believed to be accu rate
and re lia b le . H o w e v e r, n o re s p o n s ib ility is assumed b y A n a lo g D evices
fo r its use: no r fo r a ny in frin g e m e n ts o f p a te n ts or o th e r rights o f th ird
parties w h ic h m ay result fro m its use. N o license is g ra n te d by im p lic a ­
tio n or o tn erw ise un d e r any p a te n t o r p a te n t rights o t A n a lo g D evices.
205
Route 1 Industrial Park; P.O. Box 280; Norwood, Mass. 02062
Tel: 617/329-4700
TWX: 710/394-6577
SPECIFICATIONS
(typical @ +25°C and ±15VDC, unless otherwise specified)
2 06
MODEL
OPEN LOOP GAIN
RL= lk ft, V0 = ±10V
RL= 2kft, VQ = ±10V
Over Temp Range, Tmjn to T m ax,
same loads as above
OUTPUT CHARACTERISTICS
Voltage @ R l = lk ft, Tmin to Tmax
Voltage @ R l = 2kH , Tmjn to Tmax
Short Circuit Current
FREQUENCY RESPONSE
Unity Gain, Small Signal
Full Power Response
Slew Rate, Unity Gain
INPUT OFFSET VOLTAGE
Initial, Rs ^ 10kf2 (adjustable to zero)
Tmin Tmax
Avg vs Temperature (untrimmed)
vs Supply,! mjn to Tmax
INPUT OFFSET CURRENT
Initial
Tmin Tmax
Avg vs Tem perature
INPUT BIAS CURRENT
Initial
Tmin 10 Tmax
Avg vs Tem perature
INPUT IMPEDANCE
Differential
INPUT VOLTAGE RANGE (Note 1)
Differential, max safe
Common Mode, max safe
Common Mode Rejection,
RS < IQkSl, Tmin to Tm ax, Vin= ±12V
POWER SUPPLY
Rated Performance
Operating
Current, Quiescent
TEMPERATURE RANGE
Operating, Rated Performance
Storage
AD741J
50.000 min (200,000 typ)
25.000 min
±10V min (±13V typ)
25mA
1MHz
10kHz
0.5V//usec
AD741K
AD741L
50,000 min (200,000 typ)
•
50,000 min (200,000 typ)
•
±10V min (±13V typ)
•
±10V min (±13V typ)
•
•
*
*
*
*
*
•
*
3mV max (lm V typ)
4mV max
20juV/°C max
100pV/V max (30juV/V typ)
2mV max (0.5mV typ)
3mV max
15^V/°C max (6juV/°C typ)
15/iV/V max (5/iV/V typ)
0.5mV max (0.2mV typ)
lm V max
5/iV/°C max (2/uV/°C typ)
15/uV/V max (5|UV/V typ)
2mV max (lm V typ)
•
15/iV/°C max (6/iV/°C typ)
•
50nA max (5nA typ)
lOOnA max
0.1nA/°C
lOnA max (2nA typ)
15nA max
0.2nA/°C max (0.02nA/°C typ)
5nA max (2nA typ)
lOnA max
0.1nA/°C max (0.02nA/°C typ)
lOnA max (2nA typ)
25nA max
0.25nA/°C max (O.lnA/0C typ)
200nA max (40nA typ)
400nA max
0.6nA/°C
75nA max (30nA typ)
120nA max
1.5nA/°C max (0.6nA/°C typ)
50nA max (30nA typ)
lOOnA max
lnA /°C max (0.6nA/°C typ)
75nA max (30nA typ)
250nA max
2nA/°C max (0.6nA/°C typ)
IMQ,'
2Mft
2Mft
2MS2
±30V
±15V
•
*
*
•
*
•
80dB min (90dB typ)
90dB min (lOOdB typ)
90dB min (lOOdB typ)
±15V
+(5 to 18)V
3.3mA max (2.0mA typ)
«
±(5 to 22)V
2.8mA max (1.7mA typ)
•
±(5 to 22)V
2.8mA max (1.7mA typ)
•
0°C to +70°C
•
—65°C to +150°C
Note 1: Fpr supply voltages less than ±15V, the absolute maximum input voltage is equal to the supply voltage.
•Specifications same as A D 7 4 1J .
Specifications subjcct to change without notice.
*
•
*
AD741S
•
*
•
•
±(5 to 22)V
2.8mA max (2.0mA typ)
—55°C to +125°C
*
ERKOK BUDGET AN ALYSIS
AD741J
SPEC
ERROR
AD741K
SPEC
ERROR
AD741L
SPEC
ERROR
AD741
SPEC
ERROR
AD741S
SPEC
ERROR
400/iV
25.000
400/iV
25.000
400/iV
25,000
400/iV
25.000*
400/iV
400nA
80/iV
120nA
24/iV
lOOnA
20/iV
1500nA
300/iV
250nA
50/iV
lOOnA
lOOQ/iV
ISnA
150/iV
lOnA
100/iV
SOOnA
5000/iV
25nA
250/iV
PARAMETER
AD741C
ERROR
SPEC
Gain (Error = IOVtn/G)
15.000
660/iV
25,000'
lb (Error - Ifrx resistor mismatch)
800nA
160/iV
lo 5 (Error « los x lOkSl)
300nA
3000/iV
AV0$/AT (Error = &Vos/Aj- x &
25/iV/°C5 1125 /iV
20/iV/°C
900/iV
15/iV/°C 675/1V
5/iV/°C
225/iV
25/iV/° C* 2 500/i V
15/iV/°C
1500/i V
CMRR (Error = I0V/CM RR)
7(MB
80dB
1000/iV
90dB
330/iV
90dB
330/iV
70dB
80dB
1000/i V
PSRR (assume a tS% power
supply sanation)
150/*V/V 450/iV
lOOf/V/V 300/iV
15/iV/V
45/lV
15/iV/V
45/iV
150/iV/V 450/iV
8.7mV
3.7mV
TOTAL
PRICE (100 pieces)
$1.00
3 300/i V
$1.25
1.6mV
$2.25
l.lm V
$6.00
3300/iV
100/iV/V 300/iV
i2.0mV
$2.00
3.5mV
$3.30
* AD741^ and AD741S...Open Loop Gain is guaranteed with a lkJ2 load
AD741C and AD741...A Vos/A x is not guaranteed (for complete specifications, contact the factory for data sheet).
INPUT CH A RACTERISTICS
FREQUENCY - Hz
Figure 2.
Figure 3.
Max Equivalent Input Offset
D rift vs. Source Resistance
Figure 5.
FREQUENCY - Hz
Input Bias Current vs. Temperature
Figure 6.
FREQUENCY - Hi
Figure 4.
Input Noise Voltage vs. Frequency
Input Noise Current vs. Frequency
SOURCE RESISTANCE -
Common Mode Rejection vs. Frequency
Figure 7.
207
ft
Broadband Noise vs. Source Resistance
OUTPUT CHARACTERISTICS
The AD741J and AD741S arc specially selected for high
output current capability. High efficiency output transistors,
thermally balanced chip design and precise short circuit
current control insure against gain degradation at high
current levels and temperature extremes. The AD741J
guarantees a minimum gain of 25,000, swinging ±10V into a
lkf2 load from 0°C to +70°C. The AD741S guarantees
minimum gain of 25,000, swinging ±10V into a lk£2 load
from -5 5 C to +125°C. The AD741K and AD741L are
guaranteed with the standard 2k£2 load.
Ik
10k
BONDING DIAGRAM
All versions of the AD741 are available in chip or wafer form,
fully tested at +25°C. Because of the critical nature of using
unpackaged devices, it is suggested that the factory be
contacted for specific information regarding price, delivery
and testing.
CONNECTION DIAGRAMS
(Top View)
100k
FREQUENCY - Hz
Figure 8.
Output Voltage Swing vs. Frequency
orfsrr ftuu.
OMMTNUU(T
■NVIRTMGIMPUt (~T
*)0»S€T NUU NQN
^
WViftTl*GINPUT
NON»NVCATiNG(N*/T
v-E
NOTCMN4CONNCCTCOTOCASC
—0
1&— N
Y
I---©-
(H package)
Figure 9.
Output Voltage Swing vs. Load Resistance
,*
i
Vs =♦16V
- N1
i
;
i
o
> 10 1 !
10
10
ta
= ♦25*C
hl
=Zk U
V
h
0J»O'»I
(N package)
PHYSICAL DIMENSIONS
(In Inches)
_
i
\
M IL-STANDARD-883
T he A D 741S is available w ith 100% screening to
M IL-STD-883, M ethod 5004, Class A, B, or C. C onsult
the factory for pricing and delivery.
100 Ik 10k 100k 1M 10M
FREQUENCY - Hz
Figure 10. Open Loop Gain us. Frequency
O RD ER IN G GUIDE
MODEL
TEMP. RANGE
ORDER
NUMBER
AD741K
0°C to +70°C
0°C to +70°C
AD741K*
AD741J
0°C to +70°C
AD741J*
AD741L
AD74I L*
AD741S
—5 5°C to + 125°C
AD741SH
•A dd Package T ype L etter; 11 = TO -99, N = Mini-DIP.
208
PRICE
(1-24)
$1.85
$3.40
$9.00
$4.95
PRICE
(25-99)
PRICE
(100-999)
$2.70
$2.25
$6.00
$3.30
$1.50
$7.20
$4.00
$1.25
D r A iC O N V E R T E R S S
? ,.8-^A0n12>BlTC BINARY;:LOW?COS' g|
h m
M O D E LS ;;.ZD 430;431;43^:•
i r
PERFORMANCE SPECIFICATIONS
Typica!
FEATURES
25° C and t 15V Power Supplies
MOOEL NO.
20430
ZD431
RESOLUTION
8 -Bit
10-Bit
12-8 it
SETTLING TIME
(to K LSB)
OV to .10V
-5V to »5V
-10V o .10V
20 us
20 us
25 us
20 us
20 us
25 us
20 us
20 us
30 us
ACCURACY e 25* C
Scaling Error
(% of Reading) Max.*
tO .1%
( t 0.005%/*C)
<0 . 1%
( : 0 .0 0 5 V * C )
s0.05%
(*0 .0 0 2 % /*C)
Zero OMset
(%of FSR)** Max.*
- . 0 .2%
(« 0.005%/ *C)
*0.05%
( t 0.006% /*C)
•. 0.05%
(t0 .0 0 2 % /*C )
Linearity
(% of FSR)** Max.
x 0.2%
(t 0.002% /*C)
* 0.05%
(* 0.002% /*C)
* 0 .01%
( t 0 .0 0 2 V ° C )
20 4 32
• 0 -7 0 *
C OPERATION
• TTL/DTL COMPATIBLE
• LOW COST
•F IT S STANDARD DIP MATRICES
• ADJUSTABLE FSR AND ZERO OFFSET
• ALL MODELS PIN-FOR-PIN INTERCHANGEABLE
GENERAL DESCRIPTION
Models ZD430, 431 and 432 are low cost, general purpose,
modular digital-to-analog converters offering resolutions
of 8-. 10-. or 12-bits binary.
Long Term Stability
(%of FSR)**
10.05%/10.000 Hr
INPUTS
Data Coding
Each converter, including its +10V reference, is completely
self-contained in a small module. The converters are
capable of being driven either from the internal reference, or
from an external reference. When required, the internal +10V
reference can be used to drive up to two additional ZELTEX
4C0 Series DAC’s (if no external trim circuitry is connected
to the reference). If external trimpots are used to adjust the
full scale or offset, as shown in Fig. 1., the internal re­
ference supply must be buffered. Full scale range selection
is accomplished by iumpering pins, as shown in Table 1.
Modified 2 ‘s complement-bipolar
Straight binary-unipolar
Data Configuration
(TTL/DTL Compatible)
Parallel. 1 line/bit
Logic Levels
DTL/TTL Compatible
Positive True Logic
Data Loading
External Reference Input
1 TTL Load/line
.1 0 V 0 1.5 mA
User Selectable Via Wire Jumpers
OUTPUTS
O V to .lO V
Full Scale Range
Ouptut Drive
(Short Circuit Proof)
OUTLINE DIMENSIONS
j
IOV. tSV
S mA
Output Capacitive Load
The leads are spaced to fit standard DIP pc boards such as
AUGAT and CAMBION. In addition, the leads are coated
with a special tin plating which meets the salt spray re­
quirements of MIL-T-10727A.
1000 pF
Output Impedance $ DC
Output Noise
0.1 ohm
<1 mV RMS. 10 Hz to 300 kHz
Internal Reference Output • 10V ( t 1%) 0 4 mA tO.1% Regulation (No Load-Full Load)
ENVIRONMENTAL
Operating Temp.
Storage Temp.
Relative Humidity
0 to 70* C
-25 to 85* C
90% Non-Condensing
♦5V (*5% ) 50 m A
♦15V 9 25 «nA
- I S V 9 10 m A
♦ 11.5V to ♦ 16V
♦ 5V («5%) 50 mA
115V
10 mA
♦ 11.5V to 118V
POWER REQUIREMENTS
9
Derated Performance
•A d ju s t to zero error w ith external trim pot potentiom eter.
••FS R is defined as 10V fo r+ 5 V o p e ra tio n . 10V for O to + 10V
operation, and 20V for ± 10V o p eratio n.
Prices and sp ecificatio n s su bject to change w ithou t n o tic e .
MODELS ZD430, 431, 432 - BLOCK DIAGRAM
•
t
l •-? —
i *- j —
) *-i —
« •-S —
%9 - t
8
NOTES
t. Toteranc*: SO 010
noted
2. L n A float’' lo ic c o m m o d iti n r * in connccto* location
3 C m m iit n ii transfer molded eposy.
4.
&
(tfcl) IS I • - I I <#-i:—
fioai' ta II *-!S—
(uai) isi u *-i>—
• u
—
U « A . b t f y i i i u m c o o p * * w it h ip « c t« l t in p la t in g , m i t t t t h « u l l
» 0 * * y r e q u ir e m e n t * o f M IL * T* 1 0 7 ? f A .
B o t t o m w ^ a c * d o v b * « c o a t e d « * t h t p o a y — D > « if c ir ic t m u l t a t i o n
o t 4 5 0 V / m rf o r 9 '« a « * r
209
ri
• ♦»»
I
nrn
>*-* «fom
n m UKU
t i
rs •
• opar«ai
M4irccu>
moccaa
j?
•
♦ij»
d m -a*
n
h •
AS"- 9 f
INPUT CODING
OPERATION
Several external connections must be made for proper
operation ol each digital-to-analog converter. Internal or
external reference, and full scale voltage ranges are
selected by jumpering pins as shown in Table 1.
Table 2. Offset Binary
CONNECTIONS
Internal Reference
Pin 22 to Pin 23
External Reference
+10V (±10%), 1.5 mA
±10V FSR
Connect to Pin 22
MSB
LSB
2 2~3 2 “4 2 ' 5 2-6 2 " 7 2 ""
1 1 1 1 1 1 1
1 0 0 0 0 0 0
0 0 0 0 0 0
1
2 12
F.S. - 1 LSB
+'/, F.S.
OV + 1 LSB
0 Volts
OV - 1 LSB
-% F.S.
-F .S . + 1 LSB
-F .S .
Table 1. External Connections'for DAC Operation
DESIRED OPERATION
INPUT CODE
ANALOG
OUTPUT
(BIPOLAR)
1
1
1
T
0
0
0
0
0
0
0
0
1
1
1
1
0
1
1
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
3
0
1
0
Pin 21 to Pin 22
±5V FSR
Pin 20 to Pin 30
Pin 19 to Pin 22
OV to +10V FSR
Pin 20 to Pin 30
Table 3. Straight Binary
ANALOG
OUTPUT
(UNIPOLAR)
F.S. -1 LSB
+y* f.s .
INTERNAL REFERENCE
The internal reference of each D/A converter can be used
to drive two additional, units. To use, connect pin 23 of
first unit to pin 22 of each additional converter.
+% F.S.
+% F.S.
OV + 1 LSB
0 Volts
INPUT CODE
MSB
LSB
2” 1 2~2 2 ' 3 2"4
1 1
1 1
1 1 0 0
1 0
0 0
0
1 0 0
0 0
0
0
0 0
0 0
2" 5 2 ' 6 2 ' 7 2 '°
1 1 1
1
0 0 0
0
0 0 0
0
0 0 0
0
0 0 0
1
0 0 0
0
Table 4. Binary Weights
GROUNDING
Analog and Digital grounds on the ZD432 must be tied
together somewhere within the system. On ZD430 and
ZD431, the grounds are internally jumpered together.
MSB
2
3
4
5
6
7
8
9
10
11
LSB
OPTIONAL ADJUSTMENT
Each converter is ready to operate within givin specifi­
cations without external adjustments. However, special
full scale settings or fine adjustment of offset voltage
can be made using the circuit shown below. The circuit
provides a full scale adjustment range of ±10%, and an
offset adjustment range of ±40 mV.
2~'
2~2
2~3
2 '4
2 -S
2~6
2 -7
2~*
2~9
2 ~ '°
2 -n
2-12
.5
.25
.125
.0625
.03125
.015625
.0078125
.00390625
.001953125
.0009765625
.00048828125
.00024414062
NOTE: When using external reference, adjust the
fu ll scale range by varying the external
reference voltage.
Bulletin No. ZD432A
210
L ith o U . S .A .
J u n e 1973
SECTION D
FO C U S/R O TATIO N CONTROL BIN
T A B L E OF CONTENTS
1 .0
IN TR O D U CTIO N AND BRIEF DESCRIPTION
212
2 .0
BIN WIRE LIS T
213
3 .0
A PP LIC AB LE DRAWINGS
233
TA B LE OF DRAWINGS
D13720P48, Sheet 1
D13720P48, Sheet 2
F o cu s/R o ta tio n B in A ssem bly
"
"
211
"
234
235
1 .0
IN TR O D U CTIO N AND BRIEF DESCRIPTION
T h is manual d e scrib e s th e
assem bly.
co n ta in s
The b in
th e
c o n tro l
is in s ta lle d
and
data
F/R
c o n tro l
b in (B in W) w irin g and
in R ack-C in th e pedestal room and
g a th e rin g
com ponents
o f th e
F ocu s/
R otation C o n tro l system .
T he b in is in te rfa c e d to th e balance o f th e F o cu s/R o ta tio n C on­
tr o l system th ro u g h tw o re a r panel I/O co n n e c to rs .
T he b in w ire lis t
d e ta ils th e signal w irin g to these and th e b in module I/O co n n e c to rs .
AC pow er is h a rd w ire d to th e b in fro m a dedicated F/R pow er re c e p ­
ta cle
in
th e
bottom
of
R ack-C .
Power fo r th e focus and
ro ta tio n
tra n s la to rs is h a rd w ire d to these u n its from th e pow er s u p p ly ac I/O
co n n e cto r J2, s lo t 7.
T h re e
120
CFM fa n s
p ro v id e
cooling
com ponents.
212
a ir
flo w
fo r
th e
B in
W
2 .0
BIN WIRE LIS T
The
b in
w ire
lis t
of
th e
fo llo w in g
pages d e scrib e s th e in t e r ­
co n ne ct w irin g between th e module I/O and b in I/O co n nectors and is
u se fu l fo r tro u b le s h o o tin g and signal tr a c in g .
213
REVISIONS
REV
DATE
A
S /I8 /7 L
1/(3176
B
APPRV D BY
DRAWN BY
VPfl
DESCRIPTION
C O R R EC T IO N S
REVISED 7 0 'f iS BUILT COIJbmO/.1
VPR
Y
f\
6) v
i/i
DRAWN BY
DATE
,
DESIGNED BY
DATE
t
APPROVED BY
DATE
NEXT ASSY
NATIONAL RADIO ASTRONOMY
OBSERVATORY
SOCORRO, NEW M E X IC O
87801
P R O JE C T
V
L
A
u st
TITLE
F O C U S / ftO T / tT tO tf
°no6
*>1A
w tu e
USED ON
/)
1 3 7 2 0 W 5 0
C O N T ZO l
SHEET
/
S IN
OF / ?
n
r\ vnr.c.
m u
'HACK:
IBIN:
SLOT: 1 ILIST BY:
WIRE
ICONNECTOR TYPE: 5 0 PIN
FUNCTION
I PIN
•
A
f 1ST \J DC.
«
B
L^(»||C
c
+ s~ i / o c
D
I 5~ V/ 1)C
I E
—.it■
j
I
( O*v\
J" 1 IMODULE: P /ft t w r t o n
BY:
CONNECTOR PAGE:lof2
FROM
WIRE TYPE
UJ7T 1- 3 7
, ‘E L *
00 7 J I - S C
tt /V
(-€>
ICT'ScPL- +■*£"* l/b c
'X .S O U
tt 2.Z j "ES= b
(3
— \ s r \ i t>c
F
H
— /*u»pu r
C-c>/*i A*i o*J —Xopo'T
J
Po Cj S t^l> Xa ) 1^ - i.oc/i i-
K
PoejS
l- i o i
;O fc
r
TYPE: M 7
TO
S/Lo T / y />/»***.
^ /t UW A/ O
IaJTJI - It
tt/ V ,Bt»C(£.
u j*i J i - IB
* 2 2 , 'VSLL
U fl J \ - 3 Z
^2-2 ©C/*~>6«L
(f
iz. t ottA~>c,&
W 7 J / —2a
SjCo r / j f &a ++£.
G*/£c9uvfi
IaJ7 X I - 2 7
#22
U>7 T l - 2 o
j
u n T i ->2
L
TEor TS/iA/cii, "bei us.
*n
u ;“7j i - y
M
F o cu s
*2*.
U J lT l - /
N
12©r Benicis.
P
t j i g . 1 -<i>
R
C L K Z -< f>
S
S T T tr .-^ )
T
...
o R./YKE , +£© u£c£.
'bXGt O - < p
V
CL\CO — (f>
X
U^7 T l - 3
#22
&?-> iOk T~Ca))ST
D t f t f P/M-T
^Z-Z-
U 1ZT3- £
U) Z J3 - F
Js
Jt7, bLK.TLJtST
^ U J itH P/tJ-R
*2 T.
i r ^ WAjTLUiST
C L K lfiZ
U
w
•+■ SoofcciZ.
u ^ j* 3 -c r
GJ2J3 -H
X-L-L-
ST1Z.O —4>
tt:
^
Y
C L k O 0 f2 .
_
.
SAAft -g>
z
Sm A - /
H «/
/
H */
,2.
a
S M ft-Z
V '
*2 2
b
S v ift--3
"2"
^2 2-
u )z ,J 3 -/y i
BLK, Tw is t
u j it / / P/A/-V
u>£j~3 ~ E
C 0 2 .X 3 -E E
^22
I
U 02.J3- DD
UJZJ3 - J J
c
F c?Cu>*5 ^ Lc
d
PoCu»S ^Li3iO
e
I^oT
^ L £.
C vO — Local
r 22
UJ7JI — 1^
f
PoT
^ L.fs
CC
a'ZZ.
107X1 - /<?
UP— L0 cal
^22
>
uJ^ - Local * 7 1
■
— l*oc/\L
VaH J I ~ IZ
u o lT I -13
!
h
h&Ci)^
ti —Local
B'ZZ.
NATIONAL RADIO ASTRONOMY OBSERVATORY
I IT L t : h o c ^ t / JZoTfir'Tto*'
~B*«j
U J l I l -7.1
PROJ:
IaJ
DWG.NO
215
DATE: 7 - /3 - 7 6
REV:
5
SHEET <? CF/.9
H
A U K W irt L. L ib J
RACK:
BIN: W
IsLOT: 1 MODULE: P i n C o ^ r r ^ o <LIST BY:
WIRE BY:
CONNECTOR TYPE*. 5 0 PIN
CONNECTOR PAGE:2of 2
PIN
FUNCTION
WIRE TYPE
FROM
j
#22
Focwt
F~>EGj£b — Locfi\l
k
^ o rC u j L •
m
CCto
n
y
— L oca-c
U^7T/ - 2 V
P
A -L & r-O 4-
#21
|1 fl-ai 'Be,-.
r
ALGv1 - 0 -
l_p
s
ALGvl—
- ■
___
-3 0
UJZTH-
TiLtC.
U I2JH - J
b r U B (OFF
/)T 2 J 4
^ 1C. Lb
u
Focus GiiSik>
V
EtfT
w
tu r
X
T flL lt
#22
o p - TteLti
3 J I-A
T z l R.
Cw —
S U u j ccw SL€.*j
3 J /- B
TriLfL
3JI-C
T il l c .
3 J I ~D
e<o
3 J I -P
y
Pocu»s
z
£-&Cl>S t-L J ^ b — ~TiZL/Z.
3 J I -F
AA
Poc.«->s 'Bk.k. E.ajej^j
3 JI~ H
BB
&>T~ Cu> XJ'O —
CC
Ro t
DD
EE
FF
I^ -d —TKCfL
c c uj l / j b -
3 J I -£
—~Tz l e.
TriLZ.
3 J I-J
T(LL(L
3 J I-K
"Bfck:
J
Y
3 J I-L
#22
tfzz tJkj Tu>tir
P/~> h i+
#2-Z BL*c Tl^isr
WITH Pw F«=-
3 J /-T
'-'Tele
IEa>>'c> U w ue<o -—'TfS.L el
5”M l\
-2 2
U H J| -2 3
_ L / o - Local
ISfcic
Poc.os
TO
—Ltco-L
Lim
t
TYPE- Aa 7
ST1C^yfcJrt (-
HH
2 J s —A)/U|
j
j
i
2 J“3 - M
J
1
1
i
!
* X*
P/WS
2 ? ^ ^
!
/5/?£ U//££Z)
NATIONAL RADIO ASTRONOMY OBSERVATORY
i ITLE:
/ /Z-&Ta -/ / o
t /?ol.
lV/77/
TWISTET) PfilR
IH IE LbB t WIRE
PROJ:
**->
DATE-7 - 1 3 - l b
REV:
fl
SHEET3 O F / i
IDWG.NC. A / 3 - ? z o * j £- o
2 1G
• %r »
w
m
< m
u
u
RACK.
BIN:
SLOT: 1 - T Z
MODULE: F /f t C o -o r /c .
Li ST BY:
'WIRE BY:
CONNECTOR TYPE: 3 4 PIN
CONNECTOR PAGE:I of 2
PIN
FUNCTION
WIRE TYPE
FROM
it
2
.Z
r«^
P
/
2
,
IcW;
A
Poc js 'TfcsJS
— v P , Hi
" T o J WiTM C
1
ttzz
pe , ojh ;
B
_
'
1
^ocw;
,h« T
*^-» with p
t
IX 2 .1 iw pe s<-/c {
C
Poc.<-»>s Tfc^-s
T“l/J UJiTM A
It t i Tw YG. bctc
D
Focw-S "T/£~>S *D£v> —bwvj 2 eT T'L~, txJir»f
2 z Tuo P e ^ /V j
E
Tr^/^s "be.v —
> Ri
Two uiirn 4
J
tt ZZ Tlo ?€ , UH j
F
£<*f Te*>s
- cc*u>t Ki
Tt^l U>tTH J
ti zz. Tt-J P* Buj:
H
Cor
'bfc.v — c. uj > £ e.t
! t w WiTH G.
1
ti
2.2.
Tvj
Pe,
&
*■<
J
K or
b * \ / - ccuJ,
T<—> tOiYW- F
K
tt Z7,
Foe os UU L ‘ »^ S^J
L
F©Cu>S
F* F
up
M
Pocu^ *6C.IC
N
FocoS *ER./C S<3a>VI. } —
P
F^c*->S
*P F ^ Le.
R
P o to s
LL Li */\ ^ uj
S
^OT C W
3 J ~ /3J i -
m
T
*
s r i - *
*
3 J 1 - 0C
3 s i- s e
2 J \ -/M
* * • SvTl - c c
^
3 Si - cc.
3 S \-F
3 J " l-c
I
3TJ —X
I........- ----------------S J l-W
\
L 1v\
3 o r i-i>
3 X 1 — G.
9 vw>
U
R o t *Bg.IC Si=v^5/3. ^ +
V
(2.o t "Bfc/C
w
E oT" P F SL£kw>
X
^©T" C. C. u*> L Jaa ^ 10
Y
Foe os
PoL
?P S L e ^
*"0
(^>r
i AA
i
BB
TP
SGV>s£_ y *f“
T
z
TYPE-. M 7
c
■) —
'
1
3 J /' R
"'
• 3 J I-T
S J I-H
!
j
Co^
For
Exc -
i
3X1 - p
I
3 J l-V
j
tf 1
I
Exc — Lo
(2©T Por
Eocc —
Lo
CC
Fcco^
DD
^ot
EE
rpc.t>f.
FF
E oT 'Por ^ ^ 0 J r — Lo
P0r fcoc^T l^oour
r'oT
1*aa>s
h
3 X l- T
iX /- S
Pbr E .x c -R i
Focu^
»
- Mi
UtiOvJT —L 0
HH
t~o
JJ
F o ( l>S Y^A*^S A<o^ — ^G-T
cos
__ I.
I
\»
I
\
V
T T T K n ) "5 1 v
<X
TWISTLI PRIP
*2 2 - REt> S/K ^
TcO/ST£2> PR.
# 2.2- SLK SH. y iy y
ru>/ST£b P#
*
7 7 fbLK. S H .
TU)fiT£p P i* ' 'X
|
217
X 1- u
3X> -/V)
3
T 1 - k1
3 J| -rt
3 S I-
3-
3 J I-F F
;D A T “ - 7 - / 3 - 7 6
IPROJCf
13
3
3 X J -B
1
DWG. NO. A
X 1- / /
3 X | - L.
Moa; — J42.
Ip
N Ai lO N A L RADIO ASTRONOMY OBSERVATORY
T IT L c :
//2c?779-/ t o + s
o(-
3
7 Z tf ^
5-0
]
I
\
REV:
S H E E T 4 OF / 9 !
T idOL
SLOT: 1 - J 2
MODULE: >~/R
iHAOK:
3 IN: W
WIRE BY:
jU.ST BY:
{CONNECTOR TYPE*. 3 4 PIN
1CONNECTOR r*AC?::2of2
FUNCTION
FROM
? pT>n
____________________
WIRE TYPE
KK I f^oT 'b/tiit'i. M o* j — M“X
* z*
TYPE:
TO
HO)
3 J ~ f- (£G
LL { EorT''b(tit»e„ Mo*-* - £.<a/r
3J"| - H -ti
MM \DRm/SHIELD FDR FOC.'R'DDUT
NN
M7
M
X
3 J I
m m /S H IE L D FOR ROT R'D O U l
3J7 - d _
t
i
V-
Poc^s
*T\(z.
Ar
?/-»
E o rftr/ o j
Tte
T o c* a~r h
T~» £.
T o 6 c r H i? (t
"D/e
T ra ^ S
at
£_
u? t ~DO
^ £ “ o /?L/J
1
- 2:
£
- P/. J
QCuj
3 T /-C C
i
1
P/WS
(
2
....
CC./EE/MM ,
dD N bU H TO Tl
/ ff/ n n
m
5 / 'IELD ED
i
i
i
i - ........................................
1
i
|
. .
. _
..
A re
w ix e d
us , ING
W IRE .
ii
1
1
1
i
I
!
i
!
!
1
!
i
!
•
i
1
i
i
!
1
1
i
i
j
5
1
i
INATIONAL RADIO ASTRONOMY OBSERVATORY
iPROJt
i ITLEl: F oco s / fdo t A T7d *j Cjo^j TB o L,
i ti. /
!
DWG.MO. A / 3 7 z o ^ s ~ o
218
i
1
CATc: 7 - 1 3 - 7 6
j REV:
$
IS H - .- T ^ O r / 9
1 1ST BY: 'h» coeLB»s.^.
WIRE BY:
=!CTOR
TYPE*.
PIN
sy
CONNECTOR PAGE:
CONN!
FUNCTION
WIRE TYPE
1
PIN
1
G,A^ri ,'OXg.o -(p £<5-T
A
FROM
TO
B
^X&fX - <f>
#22
/ J"/
C
'DT GO —<6
#22
/J /- U
T>
Gj/O'D
U,0
T6l>!S7
WLL u), th P/ju-h
t*>A,Tu»sr
# 2 2 u//r//PW-J
M- o o 6i//j^TLUlST
Cu/r# PtN-E
•Jt 9 "7 6^^. TOJl%T
4-J- tjLurtf Piti-F
G,*jT*) CLklO- <t>
F
H
clkt
C
-<p
Lid O — £
CLKX- f
J
1J / - X
i J i- 'E
IJ I-V
/J l - T
M
SfAsb J S r a o - ^ , ^ '
L
S r£ Z -
4t22_
IJ I-S
S r e o - <j>
#22
iJ i-W
M
dq>AJX> j
STR.I ~
^£e_T
I
P
K
"P* 6 , 1 - 1
S
T
C?iK>
u
\)
C l/6 1 ~ 1
w
C L ICO - 1
X
Gf*j fc>
y
^ aJ X)
ST/2.I" - 1
AA
ST 1 2 0 -1
BB
G>A^b
CC
G)UX>
bD
s^A<e
11 s "
* zz
j
IvTi - f t
EE
S //I/V 4>
" i*
** 22-
1
!
1X > - Y
FF
H H
Cy /'JTD
JJ
5^A
3,
11 8 "
ttZZ-
NATIONAL RADIO ASTRONOMY OBSERVATORY
PROJ:
i l TLE: >~oci/5 /^ t> r/v r/o -J
rtzot- ~3s^ UJ, >ev ^
DWG. NO. 4/372.0^
219
»Ji
-
k.
DATE: 7 -/3 -7C,
REV.
3
SHEET 6 O F/?
w iric . i - i o i
pArk*.
niM- VO
ISLOT:
MODULE: 'OAT/v C/5. 71 1ST RY* T i. u j € ^ e e _ WIRE 3Y:
CONNECTOR PAGE:
PIN 3 V
CONNEICTOR TYPr*.
FUNCTION
WIRE TYPE
1
FROM
PIN
ik 2*2S>aaA i
z
Kk
LL
MM
MM
S' A*
S /C f/J frL -
tt.2.2. U)K ^TuJtir
U)MH P,fJ A)AJ
a .z i Bck, T^.^r
U'tTH P'~> MM
TYPE: M l
TO
\ J i- £
IJl -F F
1J" 1 - H H
1
NATIONAL RADIO ASTRONOMY OBSERVATORY
I ITLE:
/ E-&7A//©*•>
t (- B/«o ^ ^ ^ ^
DWG.NO.
?Tfl
PRO J:
A /3 7 2 0 <*> 4~0
DATE: 7 - / 3 ~ 7&
REV:
^
SHEET 7 O F / 9
• 9I I %
RACKBIN: v*J
SLOT:
1H
MODULE:
1 1ST BY: lAJs.ra>r-Al
WIRE BY:
CONNECTOR PAGE:
CONNECTOR TYPE:
RIN HZ
FUNCTION
W IRE TYPE
1
PIN
I
‘"D r Gn£ - 2
1
1
ii
Z
1
Z
C L fe X - 2
H
^ 2 2 . £ caoc j
CoA-K K+J, X *
frLGnZ - £
7 to Pa ,/z * zz
Co ft-XA-l G,r - */
TUj Pa i /Z *12.
1
j 'V^
AL&,J0 - 2
TU> Pa /€ J* 2,2.
.tfzz t-Jk T«*»»sr
■Dfl-r/v Tb
~Tr\-f ,
U>»TH- P»«0
it 2.1.
^T~.-J1S7~
T o "Da-TA Tfrp t ^.i2.TuPA>
WifH P#^ 0
-f
V T)c. ?oi-oi=fc
^ IH ,
r
6
7
8
10
II
IZ
S tr
FROM
TO
_____________________
1
2 J V - //
5^or 2
*CV£/*-%<*/s.
S/-o r* 2_
fiP/jAit.
S ^ o r 2.
GjhJ "D
S 'T 'i-Z C
- 7 J I - lO
11%
A-
TYPE: A ^ l
Z T *i- V
^ T klZ —Z
1
IZ
IH
A L & iZ
it 2.2.
, 7'w ur
U><7W- P,+» SZ.
a 2.2. ,
Tio«jt*
uATii P.^» 2?
ttZZ , £.£2>
<p+-
»r
nONlTOR DATA, S I G N A L
u
-M 5" UOc
17
— liTUCsc.
'Pduoe-ft.
/J -;- £
3 vT 2 - a ;
7J7 - /£
•^2 2 , Y £■/.£.
T o u jG (L
7 J 7 -/7
18
- 3
n
zo
a/
C L /C I-3
2.Z
Gja->Li
“z i
Z S H -Z Q
B l /voc
as
ZW
tt-zz
zs'
O aaT) I * > f »-*t ,
zc
C aa "D T*-> p tj>T i R fZ-~T~o
27
20
M oajxtoGII V
3 > £
}
aJ
(**>
Wh , ,l" ^ r
toiTH2d
tt2z "Btk. , /t-j«sr j
uOtti-v P/aj ZS' I
# 2 2 BLK TV//ST
WITH PIN IS
3SZ- ^
3 J '2.
S
3 J 2 - N
2J1-Z -Z
^ s Pt z ^ " h "
*2>0
^ 'Tffc 0 - 2 .
NATIONAL RADIO ASTRONOMY OBSERVATORY
PRO J:
11TLE: F o e is $ / £_o t a Tj o *>
u>t & / * j c,
DWG. NO.
2? 1
A i 3 7 Z O u src±
DATE-. 7 - / 3 - 7 6
REV:
A
SHEET <S O F / 9
Witt C. L I O I
pAf!K*
HIN: V/J
SLOT: 2
MODULE:
L IS T BY:
WIRE BY:
PIN H I
CONNECTOR PAGE:
CONNIr CTOR TYPE:
FUNCTION
W IRE TYPE
1
PIN
31
3Z
FROM
TO
H ZZ 'BtkCj Jw^.sr
-JfU>»Tt* t*i
A L 6 X - <j>“
AL&£ -
3 *i
UoQ,lC 4 r^
3 .T
*3>£ c a> - 2 .
36
Qj) AJ ^
37
CLfciO ^
_
*#
1 +
*
°
AL 6.X - -T
4o
AL6jX - 3
y
A L6>r-J -
Hi
Tb
USE.
Sff»£6-D£b
F«i/*
£
AT-%-X A>o~r£- £
*zz-
TTo i 7~/s b
(S?& t>u><»->Ci
4 t"
'Both-
/ ajp u»
7 J I -3 V
,svc©r i
JVL© 7“ 2.
S /.o r 2
sco — a
$/u£>
S jLo T2.
7J7 - ^ 2
Pa-/ ^2.
”t>/Vr/V-
IV »
77 S.
i ft t£.
^HiGLb
/-/■ - *SHt££. 2>
S7*y/i
1J I
T~'£_
ALC nX - y , fyLGoX-S- , ftL C *jl-C
(s>/&
5 X o r 2 /zjeA^e.
4-*aJD
T«-> Pa#«. tt 2Z
C& O-* P*~>} **-7W A^/2 * 2-2.
P,~ ,
T**> Pa-'Q. **- 2-2T uj Pa-.€
**■2-2.
J i /4f B Lack.
^OftLtr r
*-/Joy~£-Z
/ J f -£ 2 :
-S>C<»— 2
* 14 , 'B l o c k
^o«n^o«J
~ 1
34-
HZ
TYPE: M l
G»k) ^
33
1
Sslt-
ii
A-7*
4
*-
To
t
A L C ,X -li
/fy iG 'T .-J
4L & Z -*z , / U £ £ - 3
To
F* •
<£
S 'e r j «SXc> ;j- 2
i
1
1
i
i
NATIONAL RADIO ASTRONOMY OBSERVATORY
PRO J:
i I TLE: Fockj>s J 6LoT r^rso*J
13,/O C*j /
q
DWG. NO. A 1312. 0 uj trc>
"1
o o
DATE: 7 - / 3 - 7 6
REV.
<3
SHEET 9 O F/P
1 1ST HY: 'ti.
| WI KcCT:
CONNECTOR P A G E .l^ZPIN
CONNSECTOR TYPE*.
WI RE TYPE
I
FROM
FUNCTION
PIN
U \ S I - FF
■P
^U: *
A 1Z&T ^ o r I^ D o jT _ Lt?
TO
—-
h
U
C
?P
"D
11
u
^ L s io
t
- Wt
ii
1>J i
-
Pv c u *
11
x
r j sw
L
— T^u) *j
u>iaz-"P
£
h « ? tjs
L L T/ OM
U J 'T i- P
F
M
U L-
tJVJZ- K
H
l^ o T
J
II
K
L
Focus
n
lE©T-
/O
•\
''
U>lJ2- O
Se/OSG. -+»»
•»
'P o t
n
U liJ X - V
—
^.boJT —
»i
'n
~
U l Il-t-G
X
U J \I£ -C .C
i-4x
P0r
-iLo
n
“ —HX
ii
¥
W U Z - EB
U \X 1 -
CCv>0 L.^v X^J *
P
K
h
S
PP.
T
ii
0
FoCoS P o T
V
C
«>
u n -J X - X
•*
\2_ot- CCuJ T>»e
'»
"
Ct-J
w \ i z - v>
w in -T
ii
U>i32- A A
C. ““ Lo
u
n
»«
w n .jz - V
—Ml
W \ X Z “ AJ
Focus B^aic£ Se^se —
w
X
o
\
IV
«‘
TsoL -VS'
l|
2
K
SmrLi_tt>
£
,
*/
4-
Ft»Cu>5
J
Uj 1 J ) - Z C
Com.m 6a>
P<pcoS Pc>T
"Bl^AkliL
S km slp
■
( 2 -o r
U M lZ .-M
M-r
/ICj
i
UJ7T1 - 2 7
l± lz
PoCc>S ~B
c
2-
|4X.
#
w l J2- MM
&Z7. ) CCi=V5^
U > 7 3 i- S
^ZZ BCie
U7 J l- P
^e»T 1Epc>or
U>l J z - AJaJ
e
f
ttZZ
‘B ^ n i c c ^ c
iZo*?"
A
AC
Ci?/ut /c/i
,
Wk
U 7JZ-R
UJ7 J z. —U
^ Z z , WA
#
NATIONAL RADIO ASTRONOMY OBSERVATORY
11T L C . 1~~0 CJ?
O /
/OaJ
t L
Ay/
PROJ:
/ A/ ^
DWG. NO.
223
/5
72 & u j s -o
DATE: 7-/3- I k
REV: A
SHEET 'O OF!9
I r
i • v u .
u
<
i
RACKQ IN : W
SLOT: 3 - C T )
MODULE: P /fc 'S ‘ «J X / o
L IS T BY:
W IR E BY:
CONNECTOR PAGE: 2 »<=• i
P IN
CONN!-C T O R T Y P E : S 'S
F U N C T IO N
W IR E T Y P E
FRO M
P IN
TYPE:
-----
TO
jL
/7n
HiL&T
ftc. j ^|e
u n JZ - T
/r\
n
>c_
pno
p £ /i/£
Fac,
to T
£
/* r
/X
m
?,
'Be^VVCC.
f a r
P
c f
P
O o t M C t T/LS 6 j .
u
c m
p
ftc^
)
-t
p
■ *2 1 . T P 6JA 7
VaJ~? J X — V
i t 2-*i. j £ (£ &"tT
GffiJ'b
f i n . ) ^ 2 -2 . '7 ? > U tJ it H / / - 5 2 - / C
f a it /z .
C )£ i </SL g U /(7 T L ) 4 * 2 -2 &2.2. w k. ,Tu) »s r&>
Fotw % T^^V/OS \>B V ^ l-> P
U ) '3 z .- f l
P/*ȣ.
ii
ZX
tok
Tto*sret>
Ii
l(
M
UJ 1 J 2 . - B
PAl*.
i^ Z . BLK, TuJtsrm 1
Ii
ll
Com «a O <0
UM 3LPa >«. j Tie. To c, T)
o t
^_
I? /-—
5: ^
f~£>ct>c
1
ftA
|^ > r T e A ^ s
BB
l\
CC
M ° ° ) |4 L
T>£ aJ3 e c u
‘I
U
•»
Fc?cus T / eaa>s
j
AH
£ © r- T te ^ s
M oa^ ) R e r
P /A/S :
dt ZZ t j/ \; T w ji < r
ut>iri+ P»~* 1+h
if 2,z H><-ue. 7W« sr~
UJi M+ P/~j '3b_
Tuns r
uo vrn- p,^ E.E.
M-t5
FF
#
UJ > X Z — F
U M l Z - E.
AA. O /O
Co
T/Z-^WS
UJI J Z ~ - H H-
■ir2-1. ti>U< J T<—><5“£
Pa i « -j Tui. To
---------------------------- .
6 ^
^ EoT
tt 2.2. U i^ tT ^ is r
U» i t h P«*> f r
tt Z7~ uok Tt->is r^fi-o
p *-ie
tt-tl- l*>k. 1W>5 rEi
J CuJ
'D 'b
E E
IV /J Z - /)
lO h r
a /b /s L
S M /a a > E j>
* A / 'fl.
ARE
L*j \ T Z ~ H j J
U J I J 2 - 1C/C
I aJ \ J”Z ™ H- H
U M I2 .- LL
CJ/t ? £ J >
C /S /A /S
2
C O N J>O C T a%
UJ
N A T IO N A L RADIO A S TR O N O M Y O B SE R V A TO R Y
i IT L E :
/ £ & 7 ~ /* t ?o +j Ca^yrGt^c.
PROJ:
DWG. NO. P r / 3 7 Z O u > s o
224
DATE-. 7 V 3 - 7 6
R E V:
&
I
S H E E T // O F / M
RACK*
BIN: W
SLOT: 3 - X 2. IMODULE: P/12.
1.1ST BY;
1WIRE BY:
CONNECTOR PAG i: lo f 2
^ONNFCTOR TYPE: 3 4 PIN
V/IRE TYPE
FROM
FUNCTION
PIN
A
Focus
^ L £ t~> oP
C/ ax>
B
1“ o C u»S ^ L e ««J ~^bu)0 0*A"b
C
'^.oT^T'icw
D
^oTA Tio*J
E
Focus
UU
F
P cpcoS
LL
H
F & c j s " B e t "^eL
J
l^ o T
CCaI
K
"EoT
CCU-» L i
L
" fo T
\T \-*±
X aj"d
1J l - 3 r
- A ft
L ia^v 37/0
_L/0 "D
ICgll
X /jD
3 /V/oa> b A T tf -'R e .T
A/)oo T^ a ta - S / g,
%
Ca^"DS -
r
l-Tl-CC.
*
ZZ
1^.£.T u ft / j
1 X | —D D
> H Z.Z
i
Lp
'B L k
*1 2 ,
15"
2 j y - 2?
T^Lk.
*2 z
1J l - or
W h
2 1 4 -2 5 '
<- P
"B^-K
z j y - ZC
*z z
B.L<
IJ l -E E
S i^A t.
S
^X/O
)J l
1E a ; d _
N
T
tJ i - dH
\s \-£ H r
^3
R
|J »
^ £ tJ
K
TeLe
TO
I I I - r
CuJ Cm *1>
M
P
^ 2.Z
(TYPE: ----------
U
V
w
X
Y
z
AA
BB
CC
DD
EE
FF
HH
JJ
NATIONAL RADIO ASTRONOMY OBSERVATORY
TITLE: f~~ocus /
7"A-r / c>^
o l S//v»
PROJ:
DWG.NO. /9/3 72D
225
DATE: 7 / 3 - 7 6
REV: B
SHEETS OF / 9
BIN: W
ISLOT: 3 - J Z
IMODULE: FjgIJo
RACK:
WIRE
BY:
LIST BY:
CONNECTOR PAGE:2of2
CONNECTOR TYPE: 3 4 PIN
WIRE TYPE 1
FROM
PIN
FUNCTION
i
KK
ITYPE:
TO
LL
MM
NN
NATIONAL RADIO ASTRONOMY OBSERVATORY
PROJ:
TIT LE : ~f~oc<->s / ^ > r/v <
IDWG.NO. f\-/37 2-0 c*JS~C>
226
DATE: 7 - / 3 - 7 P
REV: &
SH EET/3 O F / I
nOMMFCTOR TYPE:
PIN ^ *
FUNCTION
PIN
14-1/ Lc>
1
Z
H l 1L o
CONNECTOR PAGE:
WI RE TYPE
1
TO
f r i z Ti<-/c
^ Z L BLki
Zs:uiFC7-
1
FROM
JMZ- /
3
H
r
/)LGvO — <J>
c
i
8
9
10
* / ‘i j o(zr\+-*QfL
■f 5* ^ Dc
~7jt-3/
ll
IZ
\l
IH
Ln */ s L c
L-Tb/SLC
\L
n
-f- \
—
~t)rvrA. -
'XZfh'TA- - ‘£ s _ r
vj't* C
1b" U
/Oac
"po i~> G-R.
Po
^22.
^
Ri£f^
7JTI
Vis. L*- OC
c
V
7X1
/5 "
-
2^T
10
2.0
21
Z2
t
!
i
23
ZH
2T
Zt
27
£47> ? TAP IN P U T t
DRTA TAP I N PUT^ ^ G rrv ^ ,o
ii'o j
) J>*>isr
U)>T** P,~. 27
2-TH— &
IT 2.2. B^-K j T ^ i s r U>ir«- B*, zc
Z J H - 9
ZB
29
ZO
N A T IO N A L RADIO ASTRONOMY OBSERVATORY
l I T L E : t~oc«_»5 / /2oTAT“/ QaJ ~&/*j C~&*J 1(2 -ijL IsJ t fit t*J
PROJ:
IDWG.NO. A / 3 7 z o ^ r o
227
DATE: 7 - / 3 - 7 6
REV:
£
S H E ET ^ O F / ?
•t I• %
RACK:
113IN: vu
SLOT: •T-J'-f
MODULE: "Dat-a. T ^ p
LIST BY:
WIRE BY:
CONNECTOR TYPE:
PIN 1 T- CONNECTOR PAGE:
PIN
FUNCTION
WIRE TYPE
FROM
TYPE:
7
TO
1
31
1
1
1
3233
3H
L.&& 1C- 4- Pouj£/2. £o-»*
,cf 3 B ^ic
j
7 jj-
3*“
36
37
3*
MZ
IL G iO - 1
H-r Q o ftc ir y
tt
2.
"Z- "T*>
C
^
Z3.
(I b A > () ^ S^-O f “ <£“"
J
I
1
1
!
NATIONAL RADIO ASTRONOMY OBSERVATORY
PRO J:
ilT L E : ^oru s / (2-c> 7~e±7~jc>Aj Cd*j / /e^>£~
ajtte
c?
DWG. NO. /? -/3 7 zo ^ r*o
? 9 p
DATE: 7 - /3 -7^
REV: £
S H E E T S O F /?
1 3
' t
ITYPE:
\s.
: iST 3Y:
!WIRE BY:
•C^.N'iECTOR T Y ^ C-.
4 2 P IN
icONNECTCS DAGE:
P!M i
FUNCTION
|
TYPE
i
1
ro c o s
2
F*>CaO*L
3
Ee>r
p i^ e r
4
c
5
6
b
i
^
|
8
frv
j
9
j LOGIC.
!
1
14
:
io
!
'6
IV / 3 1 - £
i
!
ii
( /5 - n . l S * l )
BND
!
1
#22
vdc.
P o jo rfL
f"T
u r>c.
p o o )/? 6 -
win
1-41
j
...
................ i
1
^22.
! -ts
r>vtj
i
!
I
i
! 1/vJ / 7 7 - C
__
LOCAt
FocOS
L& l GL
^ e>r
Locfii.
U^C,
~h i b
i
SLE'JJ
tntAHotj
;
1
1 L o c A L &-&T -SLfi-WJ CC
;
! fOC uc, UL -S>(JL> »AJZ>
;
i FDCU<i
: 22
!foe
| 23
;
< 24
I
^ ° r CIO L th*y ‘S.'J'L n ) 0
i
‘t?
c o T cr/;u , ,;A 5 f$j
LU
P.PUL
X soc
jXsot- *f“6
j
; 28
\xu>L
^OL
+
"fo
f y jr t j r i / i .
i 30
| p 6r
!,M *T1:
IN A L R A D IO
E:
^ 2.-2.
1
{
S J H - !U
] rf 2.*.
! #21
1
\ ti / 4
i
IV £ 7 //- t&
i
!
&L£
tt 2 2i
1—
j*?-.':.
pfirjp.
'
* 2 2
F /ft'b £ l \)fL
!
(/JI3 1 - D
!
in 1 c r / - r
Vt.c
f^oc^j S /
p/a Co ~>t* * l.
tr.ic
rf'if
!
1 7.
\ 'V H l'h
:
\'JJ/S/~
i
i
!
!
! ^ J lll-k >
|
*
1
1. S J H - f ?
OR
&-ZZ
e>7~A7~sQ'*J
C o + jt& u L ~ B j*j
60
I D W G . NO.
229
PROJ:
A /3 7Z & (~ J
\
\
!
j
i
J
1
!
I
|
!
311- V
|
1
3 J/
-
B
!
1 Ti - F
:
! UJ/J~/-//
|
u ji
ASTRONOMY OBSERVATORY
j
1
'o / J/- j y i
!U
i
^ 2 z,
i
*
\
|
I
1
i
X
1
j
f/R C o ^ tM ' a
7 / - e.
w /J/-
Dftf JC 1 ^ Z2.
DPi'jr
VJl J / - d
!
Co* * . Y o
+?i,'/)c. ^
q
22.
^
P o to iZ-fe.
"Tc>
c
i
!
p !£!-»£.!
-+ S UTDC
.
<
|
• 29 i a
,N o
I-
5
i
P©uoG,fc
POLOeft-
j
'
n UJ
.
Uj /
1
*ILF'>J COMJU ! - f
I1 + * € \/OC^. PO'JJfQ. . . . .
— I S U Vi C
0 ■?2.
^L£lK) \j P
F O '0'
i7 i - i s VDC.
IS
- /<
r typr.
2S
\AJ1 7 / - N
i»
--r ■
i
• 25
4
j
1
1
i
i
i
i*2.2.
!
1
1
I
1 12
;
I
' '/J / S h AC
r^ /u r
i
!
*
^*
S 13
s o fte r
TO
UJ/ J 7 - M
^ 22.
T)2}\)S
+
£T*.a *lp
i
!
1
*
S
€>£AKti
I
I
FROM
:
+PS 50WiCrJ
(V, g
S i - 'd
I DATE-. 7 - / 3 - 7 6 :
i REVA
i S H E E T / 6 Q F /j?
;
j U S T 9Y:
CONNECTOR TY P E :
P iM
I
3 4
WIRE 3Y:
ICONNECTOR PAGE:
P IN
F U N C T IO N
|
TYPE
|
FROM
TO
i
A
B
Foc
J
T R f if iJ i.
o
'Z o T
E
IK
F
I/S
3
H
H i
M?;
M
P
fO O
R
FOC
S
Poo
Mfscl
<VmO
'T O
£ *7"
.
rfi
&(_<
I
_
V J /- /T
P o l T jlA n s
Lo
1
I
& -K
10 A-'T
GrfJ
POL ~Ti> A *)<
i
!
1
!
h~o C.
7-5
*
/■©c.
"T ! i I — fo««
*
f-o c .
_ ............
'
1
1
j
1
!
*
"*
CM*TtL<L £<L
LO
\AsJ H T
r^jrfc-LC L £:
r^tjb
G,KJ
& .*.
!
'
W H r
i
‘
& N
!
Ac
1
CfoTfcLfc
Ac
LO
w
;—
H o r
,
T£s\~-/s %
D S T J fi)
P o t T7e/»^»Sj
T B 1— //o r
PoiL
T ^ ^ S \
7HS> J — C o »m /^|
P o /L TfZ.A~>S}
S ro i)
^
!
i
*
fc tt
f. A07{U<2.
i
I
h4 l
AC
V
1
I
!
0 - AJ
P ol T tA w v
C kiT^LP.
?■* r-z f
I
1
\j o h ~t
6 te
tr>
1
1/jrfT
FOC T t A
to
T
U
s C*JT<2LR.1> J g .
TRAUC
fe W D T O
fie
C a m ^ l c : ^«j>e
Ml
\ ) t ~ T O
N
'LO udr.f Lo
TO
\}{\C. TiO
AC
L
:
L ,o
VAC.
US
K
&C.
T*-AW S>
l/S V /^ C -
J
J
9>l \l
i4 5
C
*
1t J H T
-s ro o a c t. L o
j
3 j - / - e
:
3 T J— ^
j
{
“
—
!
S T / - * * .
3 'J '/-^ ;
j
i
j
1
X
AC
Y
1
z
1
G-fc-OOfOD
}
J
i
i
------
i
* AJo t e .
AA
1
•
%
i Hese
/)& -£ -
ujȣ.iss
!+•> S’ 7V» c l\ tS 7>
A tZ T fS G
!
t~>
j
---J
!
1
j
j
tS
" '"
GQ
CD
cc
|
DD
i
m
m
j
1
f
i------
f
j HH
i1—
i
»
j
! JJ
*-
!
i
..............................
■
1NATIONAL RADIO ASTRONOMY OBSERVATORY
iPROJ:
i T1 : L E :
cu1 /
t"/
Cc>^» 7~fccs£- ~&*~j
I d WG.MO. / 4 / 3 7 2 6 ^ 5 - o
231
i
I
----------1
ii
---------------?
*
i
D A T c :7 -/3 -7 ^
!
REV:
B
i
S H E E T / a OF 1 9 1
3 .0
AP PLIC ABLE DRAWINGS
D13720P48 - F o cu s/R o ta tio n B in Assem bly
See th e fo llo w in g
reduced
module in s ta lla tio n d e ta ils .
233
scale d ra w in g
fo r assem bly and
6
7
A/orrs:
/. t M t
r.r>S ZOUe - S /6* MS*.
tu u n r
/9 V
ZO Nf "
.WWW
W
••'WC*'
A
»
;*<f
c o w m
« m r
U m * *t) i#pc>3. 3 m u f t*k>N*tN* j i f y?
^ •***■' •-
-'•• j
H
* * A ......
j
l
//o
f r VrtOM
y3 M t f ij STAY
m rtn ofvu u m aot» fiA
- *ncs)
a fORiMSTAunrKM*
ttn w i- Jtt.*
Wl
( NOU
O trs s
< v
5
assoc.
rZ
t er x t - U N 7i
FCR"M1
> 0
M'/A'/Ht n v n
**v r#
o/T ^
‘tf/tf
' i*i». ■•«- v * 7 * <Mr»; • «•
mrs H i 1/0 r u h F L . im
t . r i i i i mm T * m M b
*
g e t ton
NO
U
fA C E
7 Hlj
K)S 12)
i/0 PANEL POSITION
SU&tfiTCC HftJtttfi (iriS*J*t) r * T »
c :
■v£3 c
(i1 {»
N0.3
)
JufXSs
F S p flW iK
\K->*
!I-s; -r,*\
'
*
---- 1 •
•
IT ! !'
■I ■'
S35ffiMr'a&S»B.
tarr(2Ptcsi
~(£j)
®
^
v
««si*r ** 5i6r i , cokMtj
l
MM - f/M
I c.-h-i *
j ' | |
V 7 ) f * * S /O f
}
^
1
@
* tQf
@
i
j I
1.
F4K s u
B /U
-i-, JI
O f M T F e t/m
unit
''
DKFNS('’*$ Aft. IN INCHtt
st’K a ^ t o
S
A i37ZdZ54
y rm
m
.....
■—
<!•<!«••» I . «•*.♦•« •*
i *i*c« MVMtit-xyp. *.
OHStRVAlOK
e t u e i f i *«v t
i*t*«"»•m»»•>'* ___
«m
FIG.
(4 H
2.
P th) COMf it )
FIG.
3
(34 /VW CoritJ,)
"
Pin COMM)
FIG.
f
m
5
( 3 4 P /v c a w i )
M N ’9 H.
jg fS
»t ■
"""'
NAi tONAl R*C
ASfRONt/.MV
'
F O C O S / # 0 7 A T tO ti
&iu *ssY.
f s q s ie z z n c z m
HOQVLL
m
r»7
m
...
N hn q
assy.
OUT* s i r
OHJSOP1S
w rr» t m >
D iitiO P M
r / * Co n tr o l
CM3720M S
r/n P o m * m m .i D ts n o m
•■ O H .
* l i TMOBH
fil3 7 tlZ M
HI 1 720*3*
fil3 7 2 0 E 5 l
FRONT
V lliW
row o r e m
fHHfLOWfrrp)
7 )p n .c '$ )
BOTTOM
VIEW
UktiU dtw^frwk
WKW90HS M l Ifl MCHCt
IfUMIMMUUt *
MATERIAL
;s f r n . f r
■rp)
I
BIN W
FOCUS/ fiOTHTiON
Biff ffMY.
ME
JKBJML
1S8L
NATIONAL RADIO
ASTRONOMY
08SERVAT0RY
nr—
■m r
«n—
twrdllMU 1
SECTION E
FOCUS/ROTATION POWER SUPPLY
TABLE OF CONTENTS
1.0
INTRODUCTION AND BRIEF DESCRIPTION
238
2 .0
ALIGNMENT
239
3 .0
APPLICABLE DRAWINGS
242
4 .0
COMMERCIAL COMPONENT MANUALS AND DATA SHEETS
253
i I
i
i •
j ;
{ ■
i I
236
TABLE OF FIGURES
Figure 1: P1 I/O Connections
240
Figure 2: P2 I/O Connections
241
TABLE OF DRAWINGS
Drawing Number
D13720S5
Title
F/R Power Supply Schematic
243
D13720P51, Sheet 1 F/R Power Supply Module
244
D13720P51, Sheet 2
245
A13720Z51
"
"
"
F/R Power Supply Module
246-252
TABLE OF COMPONENT DATA SHEETS
Teledyne Relays, Series 611
254
Lambda Instruction Manual, LCS-CC Series
256
Lambda Instruction Manual, Model LXD-3-152
288
237
1.0
INTRODUCTION AND BRIEF DESCRIPTION
This manual is a brief description of the F/R power supply unit
(module type M8) and is intended to be the principle repair and
maintenance guide.
The
power
supply
consists
of
a group
of
commercial power
supplies and optically coupled solid state relays which provide dc
power for the components of Bin W (F /R
Control system bin) and
switched 110 volts ac for the focus and rotation brake controllers.
See the system manual for a description of the brake controllers.
The front panel of M8 also functions as a control/display panel
to permit local control of the F/R drive assembly via module M7 (F /R
Control
u n it).
The power supply may also be used as a remote
control/display panel in the single-dish tra ile r.
When used in Bin W
J1 pins 41 and 9 should be jumpered on the bin I/O connector.
When
used in the single-dish traile r J1 pins 8 and 41 should be jumpered in
the bin I/O connector.
Both drive translators derive their ac from this unit and are also
switched and fused in this unit.
An RFI filte r (F L I) provides an attenuation of high frequency
noise and spike noise for the analog and logic power loads of the
power supply.
The translator power is not filtered.
The attenuation
properties of the filte r are as follows:
Frequency - MHz
Attenuation - dB
.15
20
.20
30
238
.5
60
10
20
70
70
2.0
ALIGNMENT
There are two power supply alignment adjustments which should
be performed on this unit before use, these are:
2.1
±15
V
(PS1) adjust to 15.000±.050~.
accessible from the top of the module.
The adjustment is
Measure the voltage at
the front panel +15, comm, and -15 test points.
2.2
Logic
+5
power
(P S 2),
adjust to 5.100 V±.025 V .
The
adjustment is accessible from the rear panel through an access
hole.
Use a long screwdriver.
Measure the voltage at the front
panel +5 logic power test points.
2.3
set.
The isolated +5 power supply is not adjustable, it is factory
It should,
however, be checked at the front panel test
points prior to use.
All
rear panel
I/O
power connections should be verified
before installation in the system.
See the schematic diagram on
Figures 8 and 9 for the associated power pin outs.
239
x j-
@
® @
8 >w
^<
® _ ©
(39
©
® ©
©
^
- ®
02 )
®
fr
® @©
®Z(D
©S©
©
©
©
~ ©
X
©
©
®
© © ©
GND
/U
+
SINGLE WIDE MODULE
( REAR VIEW )
PI
(REARVIEW)
PI
PIN
FUNCTION
Focus Brake +Source
Focus Brake Drive
Rot Brake + Source
Rot Brake Drive
8
10
II
12
Tsnl +5-Hi
Logic Comm
+ 5VDC
-5 V D C
WIRE COLOR
#22. Orange
#16, Brown
ORANGE
Oranae #16
13
14
15
16
17
Local Foe Slew Dwn
Loc Rot Slew CW
#22, Blk
18
±15 V Comm
19
Local Rot Slew CCW
20
21
*
- E n n is T lL .-In d __ n r i v p
Foe LL Ind. Drive
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
#22, Wh
#22, Wh
+• I5VDC
-I5 V D C
22
#22/ Wh
#22. Wh
Local Foe Slew Up
+15 VDC Pwr
PIN
#22. Wh
Red, #16
RED JL L6YELLOW . #16
WIRE COLOR
Foe Brk Enrgzd Ind.
#22, Wh
Rot CW Ind.
#22, Wh
Rot CCW Ind.
#22, Wh
-15 VDC
Yellow, #16
Isol +5, HI
Isol +5, Ret.
Orange, #22
Brown, #22
Isol +5, HI
Isol +5, Ret
Orange #22
Brown, #22
+5 L o g ic Pw r
-15 VPC
Orange. #16
Yellow #16
Logic Comm
Brown #16
Logic Comm
Logic Comm
Brown, #16
Brown, #16
4-15 VDC
Red, #16
Front Panel Sw Comm
±15 V Comm
#22, Wh
39
Black, $16
Wh. #22
Wh. #22
40
41
Wh, #22
42
IN D IC A T E S A FU N C T IO N NOT FOUND IN THIS M O D U L E .
Figure
FUNCTION
1
Black, #16
P2
(REARVIEW)
P2
PIN
A
B
C
D
E
F
H
J
K
L
M
N
P
R
S
T
U
FUNCTION
WIRE COLOR
Foe Trans AC Source-Ho : Black.
Foe Trans AC Source-LO White.
Rot Trans AC Source-Ho - Black.
Rot Trans AC Source-I/D White.
Black,
Logic PS AC-Hot
#16
#16
#16
#16
#16
Logic PS AC -LO
White. #16
AP Fn Pnr Trans-HnlAC to Foe Trans-LO
Rlaekr #16
White. #16
Green #16
Black. #16
White, #16
AC Gnd to Foe. Trans
AC to Rot Trans-Hot
AC to Rot Trans-LO
AC Gnd to Rot Trans
Foe Brk Cont AC-Hot
Foe Brk Cont AC-LO
Green. #16
Black. #22
White, #22
Foe Brk Cont-Gnd
Rot Brk Cont AC-Hot
Rot Brk Cont AC-LO
Green, #22
Black. #22
White, #22
Figure 2
741
PIN
V
W
X
Y
Z
AA
BB
CC
DO
EE
FF
HH
JJ
KK
LL
MM
NN
FUNCTI ON
WI RE COLOR
Rot Brk Cont-Gnd
Green- #22
AC Gnd
Green, #16
Fan AC Power-Hot
Fan AC Power-LO
#22, Black
#22, White
3.0
APPLICABLE DRAWINGS
D13720S5
- F/R Power Supply Schematic
D13720P51 - F/R Power Supply Module
A13720Z51 - F/R Power Supply Module
242
KCOtAm* r* *x j w nr'
f»CUS BKAKf CONTROL
ro c u s M * * * e c o m tk o u c *
ac
pot.
^ rr<
M * * r e o *r*o i
pot. b p a k f
AC
e o *r*e u ft
/M Vf
+>sv
i/jy
to m
-*sv
F/P COtfTKOL
PW4
**¥
(«M Wf
B
{MX CMM
ASM. *IV
H O T t il
Kteo*imsnDU> m P M 3f w r * c t
*oouii. aw,
Mins
orttaQtut jw w « , w
w*
s#pms
m
.
m 7MIH j # rr
/. w «
rvr
or C0*r o u te r s
g
air
s & r u a amd n o k r pm. n to
o e m rm ;
# / W P & T U t * , <VK0* /«*#
/J J * * * *
POUT CD 4 1 0 * 4 * * K“ —
%
t * t o u r - ‘ /Pot'rr < « « r* r a w ; • Cfitop- 4*6 (M e n 4 s ru c4 4< e)
( • 1tt a - a iK - H , \ . v A / ir s t o r t t r f w i s e s t t c / w * a u w t x r s 4 t r e^
<40 * (W M 7 u m r s s o p t r x v i s r s p c c m r o . y r * f ie c 4 T f M • *
9 * 4 * 4 6 *9 ,
K4H. *
* / /4 /i »• /J iHOWti
L a u ru ttc n o M i v t o * * t r m n i t
o r r * r s p o u t p m l.
j,
M t r t - m t r rm m t*A Tto*s a t p s i
p f jr/4.
FKAJ4C A #P
/ O* DH710 PS!
1 4 4 f M A & K fO on r * r « « A //-ruMlm ftrnlihMist s ttc iH f F
DMCNSIom AM IN MCHtt
4p s i
m ai jw m a w n * u r ;
mmmnt m o i a
iKMMMUUBDOt *
tnM KM M M UW t «t
I I M M N M M I U I ft
MATCttAL
9
L SOI
s c o r 4 i« »
MBiM
Q U B m'------uHTffi
h m m h J m H K JB
mB
msur
M8
1
NATIONAL RADIO
ASTRONOMY
OBSERVATORY
*F/R POWER SUPPLY ■ nr —
tr
SCHEMATIC
T *T
n r*
'U ±
^ • liT O iR e m ia e
MO T fS ;
I
[Z] yt*RKint 3M4U o r , / i #/<-,// ( ( c / e i f
Pe4 MAHeN7
0
COC4 T f
AFXoi
7H€ a d j . p c j o n p s a ( n ( * i e )
amd
wtv I »*Tf | WMWtT | OWOIt I
.Jj WVM
AS
m ust
I
mu**- ^T*
Urv/Atano
zs:
u n f
UP # !7H 74C ADJUSTMfN7 ACCfSS tfO lf /V
7* f RFAP PAH€L .
S I 7 V f CO#IPON£k)T/ A t f 4 S
5H o*V# 6MAIL
fM O O K ttf OF A tV / t / A t d S i n y / f r t o o t *
tfjV f
70
P t v o r 7 4 t * t f t o » t r # e / t # 0* * 941 . o P f t 4 rm q
p o s trto M ro 7* f s o t v /c r r o s m o n s su o *W
W //<?. /. V/if/A/O
acJWCiN TPf fAHOUS
AJtfAl sttail Fotiomt o#e of r*r fouo# m*4
*o*rts
;
4-C. V l t l V d - A (O U 4 ifA J P rX S /O f OF f A H J f .
£>c. vtttvc, 41 oak, 7opstir op pah~a
4. A ll SOI PC* r f * 44W A 7/OA/S A P f 7O I f P P o r ttT fP
WIT# SMKlUK S ( C fr /*/4
(3 APnr smcoMf (nt* >4) ro uMCfPMor (mt*
S4/PFA€f)
OF H i i t f
A
e jjl I
0
+
PS3
i i
f = » i
ll
TYP
PS/
PS t
e w o
f f to o
a w o
a ff«D
A RCO D (FO P At7<s JSAKS)
A W O (p o p Pwp S t/F P ir)
* P fQ ’O (F A * m * PAPS)
A P f o o (pop rw x supply)
A /p
j22j
4t*
UNLESS6tMIRW»S£ SPECIFIED
DIMENSIONSARCIN INCHES
tOltMMCtl MNUI *
IKMMO«UI.Mk *
1
i hac«Mawui nt *
T
IfUWHOWUU; *
MATERIAL:
1f / r
FINISH:
ft -
r
NATIONAL RADIO
ASTRONOMY
™
OBSERVATORY
w
nKO
m
m
omm****arm*
mrs;----------- UH~
p o w e r s u p p l y k w t — "" (TO---MODULE
Sv
£$**»
1SSL' - 1 E S U 6i s 7 ?opm L a |
8
.t...
M . 4, 7
M 3,S,t
J2
W
W
rue’s G*
4 HCS
+ +
q w
7At. S.?
N 7*4,4
© r«
&
HQ
9M 4H J M 0 4
TttiS I M t
sEcr A-A
B
t
SEC T » • »
(D
REVISIONS
DATE
REV
DRAWN BY
APPRV' D
DESCRIPTION
BY
C//4 : ITC M &9 Ml J
B
8/9//S
/)D O F O :
a~3Z*ys SKT ft t>.
89
/
DRAWN BY
DATE
DESIGNED BY
DATE
APPROVED BY
DATE /
/ l / z v / 7L
A?<S
b n t z o P s ' t
NEXT ASSY
NATIONAL RADIO ASTRONOMY
OBSERVATORY
SOCORRO, NEW M E X IC O
87801
P R O JE C T
V
L
A
TITLE
DWG
NO.
U SE D
ON
M8
F /R POWER SUPPLY
MODULE
A13720Z51
SHEET
OF 7
ti I L L Ut' M A X L K i a i i
NATIONAL RADIO ASTRONOMY OBSERVATORY
|
| ELECTRICAL
MODULE ft M8
f X ^ MECHANICAL
NAME
F/R POWER SUPPLY MODULE
SCHEMATIC DWG ii Q13720S5
ITEM
tt
1
BOM l» A13720Z51
NRAO
i
DWG # D1372QP51
LOCATION _____________
MANUFACTURER
REF
DESIG
REV
fi
DATE ____________
SUB ASMB
QUA/SYSTEM’______
9
_ _ _ _ _ _ _ _ _ _ _
PREPARED BY
p
p„nynn
DESCRIPTION
MFG PART #
A13720Z51
PAGE
OF
DWG tt _
APPROVED ____
TOTAL
QUA
F/R POWER SUPPLY MODULE
2
3
WIRE LIST - HAND
4
5
D13720M27
ENGRAVED FRONT PANF.T.
1
6
C13720M28
PANEL. REAR
1
7
D13720M29-1
RAIL..SUPPORT .
2
8
D13720M29-2
RAIL. SUPPORT
2
9
C13720M30
BRACKET. MTG.
2.
10
B13720M31-1
BAR. MTG.
9
11
B13720M31-2
BAR, MTG.
2
B13050M4
GIITDE
4
B13720M47-2
SPACER
4
i
12
13.
14
15
f
NFAO
BILL OP MATERIAL
NATIONAL RADIO ASTRONOMY OBSERVATORY
□
ELECTRICAL
ITEM
#
XX] MECHANICAL
REF
DESIG
BOM # A13720Z51
MANUFACTURER
J2
REV
PAGE
DATE
MFG PART #
DESCRIPTION
3
OF
TOTAL
QUA
16
PS1
LAMBDA
LDX-3-152-R
POWER SUPPLY (±15V)
1
17
PS2
LAMBDA
LCS-CC-5-OV
POWER SUPPLY (5V)
1
18
PS3
ANALOG DEVICES
905
POWER SUPPLY, ISOLATED
1
19
XPS3
ANALOG DEVICES
A C 1013
CONN. BOARD, POWER SUPPLY
1
21
Kl, K2
TELEDYNE
611-2
RELAY, SOLID STATE
2
22
FL1
CORCOM
10R1
FILTER, EMI
1
niALCO
521-9203
L.E.D. - GREEN
3
DIALCO
521-9200
L.E.D. — RED
4
DIALCO
5150Q5
L.E.D. - Housing
7
LITTLEFUSE
344125
FUSEHOLDER, INDICATING
5
BUSS
MDX- 6-1/4A
FUSE, SLO-BLO (6A)
3
LITTLEFUSE
3AG- l-1/4A
FUSE, SLO-BLO (1A)
2
20
248
23
24
25
DS1,DS4
DS7
DS2,DS3,
DS5,DS6
26
27
XF1-XF5
CO
CN
•F2,F3
•*5...........
29
F1,F4
7
_
30
31
R2
RCR20G121JS
RESISTOR 120*5 1/2 w, ± 5%
1
32
R1
RCR42G150JS
RESISTOR 15**; 2 w, ± 5%
1
□
ELECTRICAL
ITEM
#
XX] MECHANICAL
REF
DESIG
MANUFACTURER
BILL OF MATERIAL
NATIONAL RADIO ASTRONOMY OBSERVATORY
BOM # A13720Z51
REV _____
DATE
B
MFG PART #
PAGE
DESCRIPTION
4
OF
TOTAL
QUA
R3jR4
DALE
RE65G1501
RESISTOR, 1.5K , 10 W, + 1%
2
35
SI
CUTLER HAMMER
MS245 2 5 -2 7 '
8502K9
SWITCH, TOGGLE, FOUR POLE
1
36
S2-S5
ALCO
MSPS-103C
SWITCH, PUSHBUTTON
4
TP 1
TP2,TP5
TP 7
TP4 , TP6
E. F. JOHNSON
105-0602-001
TIP JACK - RED
1
TP 3
J2
33
34
37
38
249
39
40
41
105-0603-001
- BLACK
3
105-0606-001
- ORANGE
2
E. F. JOHNSON
105-0607-001
TIP JACK - YELLOW
1
AMP SPEC. INDUST.
/
201357-3
CONNECTOR, 34 PIN
1
202434-4
SHIELD, 34 PIN CONN.
1
204186-5
CONNECTOR, 42 PIN
1
202394-2
SHIELD, 42 PIN CONN
1
20421-9-1
PIN, CRIMP
42
43
44
45
46
47
48
49
J1
1
AMP SPEC. INDUST.
56
J
ETLL OF F1ATETTT7TL
NATIONAL RADIO ASTRONOMY OBSERVATORY
|
jELECTRICAL
ITEM
ft
1
MECHANICAL
MANUFACTURER
REF
DESIG
BOM # A13720Z51
3
REV
DATE _____________
PAGE
5
OF
TOTAL
QUA
DESCRIPTION
MFG PART #
50
AMP SPEC. INDUST.
200833-4
GUIDE PIN
51
AMP SPEC. INDUST.
202514-1
GUIDE PIN (GND)
52
AMP SPEC. INDUST.
203964-6
54
AMATOM
10526A-1032-2
HANDLE
1
SS
EMC
5739-52-6
STANDOFF, INSULATED
2
56
SOUTHCO
47-10-204-10
CAPTIVE SCREW
4
6-32 x
SCREW,FLAT HED.,CROSS RECESSED,ST.ST1L
8
SCREW,PAN H D .,ST. ST'L.
4
_
.....2.......
.
nUTDF. SOCKET
.
_
______
2
A.
53
250
57
58
SQ
8
60
61
/
2-56 x 5/16
1
62
6-32 x 1/4
2
63
6-32 x 3/8
6
64
6-32 x 1-1/8
8
65
8-32 x 1/4
66
8-32 x 3/8
i
'
SCREW, PAN HD., ST. ST'L
..
.....
2
20
NATIONAL RADIO ASTRONOMY OBSERVATORY
□
ELECTRICAL
ITEM
«
REF
DESIG
XX] MECHANICAL
MANUFACTURER
BOM If A13720Z51
REV
B
DATE
PAGE
MFG PART #
DESCRIPTION
6
OF
TOTAL
QUA
67
10-32 x 3/8
SCREW, PAN HD. ST. ST'L
2
68
6-32 x 1/2
SCREW, SKT. HD. CAP, ST. ST'L
4
69
8-32 x
SCREW,
4
»/<f
HD.
ST. ST'L
70
71
72
No. 2
WASrfER, SPLIT LOCK, ST. ST'L
4
I b C
73
74
No. 6
75
No. 8
76
No. 10
WASHER, SPLIT LOCK, ST. ST'L
2
79
No. 6
WASHER, EXT. TOOTH, ST. ST'L
20
80
No. 8
WASHER, EXT. TOOTH, ST. ST'L
8
82
2-56
NUT, HEX., ST. ST'L
4
83
6-32
NUT, HEX., ST. ST'L
4
6
\
t
14
77
78
81
1
BILL OF MATERIAL
NATIONAL RADIO ASTRONOMY OBSERVATORY
□
ELECTRICAL
ITEM
#
XXR MECHANICAL
MANUFACTURER
REF
DESIG
REV
85
£
DATE
PAGE
7
e v s BRRy T /N N E D COPPER
AMATOM
20125-8-.020BRASS-H.T.
SOLDER LUG
AMP. SPEC INDUST.
32498
TERMINAL, INSULATED
OF
7
TOTAL
QUA
DESCRIPTION
MFG PART 11
298
84
86
BOM # A13720Z51
fi/R
8
87
88
22-16 AWG
A/R
(Type PIDG)
252
89
32562
22-16 AWG
A/R
90
320861
16-14 AWG
A/R
22-16 AWG
A/R
91
AMP. SPEC. INDUST.
324557
TERMINAL, INSULATED
(Type PIDG )
G. E.
In s u lg r e a s e G641
SILICONE DIELECTRIC COMPOUND
92
93
94
A/R
4 .0
COM MERCIAL COMPONENT MANUALS AND D A TA SHEETS
253
r
/"
W* TELEDYNE RELAYS
SERIES,
10 , 25 ,40 AM P
14 0 ,25 0 VAC
SOLID STATE AC RELAY
TTf
OPTICALLY ISOLATED ZER O VO LTAGE TURN-ON
UL R EC O G N IZED
F EA T U R E S
AP PLIC A TIO N S
• Computer Peripherals
• Machine Tool Controls
• All solid state
• Optical isolation between control and
load circuits
• Process Control Systems
• Traffic Control Systems
R E L IA B L E SOLID S T A T E SW ITCHING O F
• Solenoids
• Motors
• Motor Starters
• Lamp Loads
• Ultra sensitive control input-compatible 3
with T T L logic
• Transformers
• Heaters
• Zero-voltage turn-on, zero current turn-off
• High dv/dt suppression
(200 V//isec typical)
PART N U M B ER IN G
INPUT CONTROL
V0LTA6E RAN6E
• Multipurpose terminals - screws &
quick disconnects
OUTPUT(LOAD)CURRENT
RATING ft PART NUMBERS
OUTPUT VOLTAGE
RATINGS (VAC)
Continuous (RMS) Transient (PEAK)
• High “ contact” surge rating 10 0 0 %
overloads
3-28 VDC
• High transient peak voltage (up to 600 V)
25 AMP
10 AMP
40 AMP
140
200
6 11-1
6 11-3
611-5
250
400
6 11-2
.6 11-4
611-6
250
600
6 11-2 H
6 11-4 H
611-6H
E LE C T R IC A L SPEC IFIC ATIONS
(25°C UNLESS OTHERWISE SPECIFIED)
INPUT (CONTROL)
SPECIFICATIONS
CONTROL VOLTAGE RANGE
OUTPUT (LOAD) SPECIFICATIONS
MM.
m .
3
INPUT CURRENT AT 5 V
CONTROL VOLTAGE
(-40*C < T a < 80"C)
MAX.
UMTS
28
VDC
6
MA
OUTPUT CURRENT RATING
(SEE FIGURE 2 & 4)
3.8
VDC
SURGE CURRENT RATING (16MS)
(SEE FIGURE 3)
VDC
OVERVOLTAGE
RATING
10*
CAPACITANCE
(INPUT TO OUTPUT)
DIELECTRIC STRENGTH
(INPUT TO OUTPUT. INPUT
TO CASE)
REVERSE VOLTAGE
PROTECTION
8
10
(RMS)
611-1.3.5
200
400
P*
140
250
VAC (RMS)
60 Hz
30
VDC
0 .8
TURN-OFF TIME (60 Hz)
5.0
ISOLATION (OUTPUT TO INPUT.
OUTPUT TO CASE)
DIELECTRIC STRENGTH (OUTPUT TO
INPUT. OUTPUT TO CASE)
OFF-STATE LEAKAGE (40*C < Ta
< 8 0 *C )
(SEE NOTE 2)
VAC
8 3
MS
16.6
MS
OHMS
1500
VAC-60 Hz
0140V
8
13
*1 2
100
MA(RMS)
V(PEAK)
200
V/«isec
10 A. 25 A
1 21
40 A
1 25
UL RacogniUM - FILE No. E55197
Specifications snown herein » • suDpct to change without notice
254
1.5
0250V
OUTPUT TRANSIENT
IMMUNITY
TRIAC POWER DISSIPATION
Hz
% OF
RATING
10'
ZERO VOLTAGE
TURN-ON POINT
r•• • • 1» •>w
.
70
1000
V PEAK
TURN-ON TIME (60 Hz)
1500
VAC (RMS)
600
CONTACT VOLTAGE DROP AT
RATED CURRENT
PATENT #3.648.075
»•
AMPS
10
40
611-2.4.6
6 1 1 -2 H .-4 H .-6 H
OHMS
UNITS
0.05
47
TURN-ON VOLTAGE
(- 4 0 * C < T a < 80*C)
MAX.
0 .0 5
FREOUENCY RANGE
VDC
ISOLATION (INPUT TO OUTPUT.
INPUT TO CASE)
611-3.4-4H
611-5.6-6H
TYP.
25
12
3 .0
0.8
005
LOAD VOLTAGE RATING
(SEE PART NUMBERING)
TURN-ON VOLTAGE
TURN-OFF VOLTAGE
(-40°C < Ta < 80*C)
MIN.
6 11 -1 .2-2H
WATTS/
AMP
CHARACTERISTIC CURVES
F IG U R E 1
FIG U R E 2
SURGE CURRtNl OUMtKW (MIUISECONOS)
FIG U R E 3
FIG U R E 4
M EC H ANIC AL SPECIFICATIONS
W IRING DIAGRAM
SSO (>3 9?m m |—
TEMPERATURE
MEASUREMENT POINT
7'
T
I
v'j
U 1r
AMBIENT TEMPERATURE RANGE
-40*C to ♦ 80*C OPERATING
-40*C to + 100*C STORAGE
WEIGHT 4 0? MAX
CASE MATERIAL PLASTIC. RATEOSELF-EXTINGUISHING
BASE PLATE MATERIAL ALUMINUM
Dimensions are shown in inches and millimeters
t transient (d v/d t) protection is provided in all models, and they are designed to operate resistive or m/e loads
2. Maximum triac junction temperature is 100°C (110*0 lor 40 AMP) For any mounting conditions « | Base lor 10 AMP. andej-Base - 1 3°C/W lor 25 and 40 AMP
3. A typical I 0®C/W heat sink is Astrodyne P/N 2518-0500-A008
4. Triac may lose blocking capability during and alter surge until Tj tails below maximum
Printed in U.S.A.
7/7S
255
1 8#C/W
TELEDYNE RELAYS
3155 W E S T EL S E G U N D O B O U L E V A R D
HAWTHORNE. CALIFO R N IA 90250
(213) 973-4545 • 772-4357
TWX 910-325-6600
INSTRUCTION M A N U AL
FOR
REGULATED PO W ER SU PPLIES
LCS-CC S E R IE S
G-9302-5
This manual provides instructions intended for the operation of Lambda power supplies, and is not to be
reproduced without the written consent of Lambda Electronics Corp. All information contained herein applies
to all LCS-CC models unless otherwise specified.
L A M B D A E LE C T R O N IC S CORP.
M E L V I L L E . L.I.. N Y.
M A I N P L A N T T E L E P H O N E : 516 M Y rtle 4-4200
256
TABLE OF CONTENTS
Section
SPECIFICA T ION S AND F E A T U R E S ..................... ...................................................................
1
THEORY OF O P E R A T IO N .......................................................................................................
4
OPERATING IN ST RU CT IO N S...............................................................................................................’ ' 6
Basic Mode of Operation.......................................................................................................................... 6
Connections for Operation........................................................................................................................ g
Supply-Load Connections........................................................................................................................ 0
Operation After Protective Device Shutdown..................................................................................
7
M A IN T E N A N C E .................................................................................................................................... V s
G eneral..................................................................................................................................................... 8
Trouble Analysis........................................................................................................................................8
Checking Transistors & Capacitors......................................................................................................... 8
Printed Circuit Board Maintenance Techniques.................................................................................... 8
Trouble C h a rt........................................................................................................................................... 9
Performance Checks................................................................................................................................ 10
Adjustment of Calibration Control R 13..............................................................................
10
................... n
SERV ICE ..........................................................................................................................
PARTS O R D E R IN G .............................................................................................................................. . 1 1
"
257
IM-LCS-CC
SPECIFICAT ION S AND FEATURES
Specifications apply for all models.
DC OUTPUT — Voltage regulated for line and load.
TABLE I
VOLTAGE AND CURRENT
RA NG ES
MAXIMUM CURRENT (AMPS)
AT AMBIENT TEMPERATURE
VOLTAGE
RANGE
40°C
50°C
60°C
71°C
LCS-CC-2
2 ±.5%
16.0
14.5
12.7
10.5
LCS-CC-5-OV
5 ±.5%
16.0
14.5
12.7
10.5
LCS-CC-6
6 ±-5%
15.2
13.8
12.1
1 0 .0
LCS-CC-12
12 ±.5%
10.5
9.4
8.2
5.0
LCS-CC-15
15 ±.5%
9.5
8 .6
7.4
4.8
LCS-CC-20
20 ±.5%
7.7
7.2
6.5
4.4
LCS-CC-24
24 ±.5%
6 .8
6.4
5.7
4.4
LCS-CC-28
28 ±.5%
6 .0
5.6
5.0
4.3
LCS-CC-48
48 JL5%
3.7
3.4
3.0
2.2
LCS-CC-01
0*7
9.2
8.3
7.4
6.3
LCS-CC-02
0-18
3.8
3.5
3.2
2.7
LCS-CC-03
0-32
2.3
2.1
1.9
1 .6
MODEL
Current range must be chosen to suit the appropriate maximum ambient temperature. Current ratings apply
for entire voltage range.
REGULATED VOLTAGE OUTPUT
Regulation (line)................................................... 0.01 percent plus 1.0 millivolt for
input variations from 105-132 or
132-105 volts AC.
Regulation (load)................................................... 0.01 percent plus 1.0 millivolt for
load variations from no load to full
load or full load to no load.
IM-LCS-CC
258
1
Remote Programming
External Resistor............................................ Nominal 1000 ohms/volt output
Programming Voltage.................................... One-to-one voltage change.
Ripple and Noise....................................................250 microvolts rms; 1 millivolt peak
to peak at 57-63 Hz input with either positive or
negative terminal grounded.
Temperature Coefficient........................................ Output change in voltage (0.01% + 0.3 mv)/°C.
Remote Sensing......................................................Provision is made for remote sensing
to eliminate effect of power output lead resistance
on DC regulation.
OVERSHOOT — No overshoot under conditions of power tum-on, turn-off, or power failure.
AC INPUT — 105-132, 205-265 or 187-242 (“V ” option) volts AC at 47-440 Hz. Input Power: 300 watts.*
For operation at 47-53 Hz, derate current 10% for each ambient temperature given in table I. For 63-440
Hz operation, consult factory.
* With output loaded to full current rating and input voltage, 132 volts AC, 60 Hz.
OVERLOAD PROTECTION
Therm al.................................................................Thermostat, resets automatically when over
temperature condition is eliminated.
Electrical
External........................................................... Automatic electronic current limiting circuit, limits
output current to a preset value less than 1 10% of 40 °C
current rating. Automatic current limiting protects
the load and power supply when external overloads
and direct shorts occur.
OVERVOLTAGE PROTECTION — Model LCS-CC-5-OV includes a fixed built in overvoltage protection
circuit which prevents damage to the load caused by excessive power supply output voltage.
Overvoltage protection firing range is between 6.2 and 7.4 volts D.C.
INPUT AND OUTPUT CONNECTIONS - Terminal block on rear of chassis.
OPERATING A M BIEN T TEM PERATURE RANGE AND DUTY CYCLE - Continuous duty from
-2 0 °C to 71°C ambient with corresponding load current ratings for all modes of operation.
STORAGE TEM PERATURE - -55°Cto85°C
(non-operating)
CONTROLS
DC output control................................................. Voltage adjust control permits adjustment of DC
output voltage via access hole located in nameplate.
2
259
IM-LCS-CC
PH YSICA L DATA
S ize ........................................................................ 4-15/16” x 4-15/16” x 9 -3 / 8 ”
W eight...................................................................15 lbs. net; 17 lbs. shipping
F in ish.....................................................................Grey, FED. STD. 595 No. 26081
MOUNTING — Three surfaces, each with tapped mounting holes can be utilized for mounting this unit. All
LCS-CC power supplies can be mounted with Top, Front, or Right Side facing up. Top, Front, or Right
Side must be in a horizontal plane. Refer to figure 13 for mounting details.
M O D E L OPTIONS
“J ” O ption. . . .
Standard LCS-CC power supplies can be obtained for
90*110 VAC, 47-440 Hz input. For operation at 47-53
Hz, derate current 10% for each ambient temperature
given in table I. For 63-440 Hz operation, consult
factory.
Standard LCS-CC power supplies can be obtained for
205-265 VAC, 47-440 Hz input or 187-242 VAC, 47-440
Hz input. See nameplate for AC input rating. See
schematic diagram for rewiring of AC input. For
operation at 47-53 Hz, derate current 10% for each
ambient temperature given in table I. For 63-440 Hz
operation, consult factory.
Fixed voltage LCS-CC power supplies must be specified
with the “S ” option when used with the Systems
Power Sequencer. On Units with “S ” option, resistor
R20 is jumped, see schematic diagram.
“V ” Option
“ S ” Option (LCS-CC-5-OV-LCS-CC-48 Only)
ACCESSORIES
Rack Adapters..............................................
Rack adapters LRA-6 , LRA-10, LRA- 11, and LRA-13
used for ruggedized mounting with or without
chassis slides are available as well as rack
adapter LRA-3, which is used for simple rack
installations where chassis slides are not required.
Overvoltage Protectors................................
Externally mounted, Overvoltage Protectors LMQV-1,
LMOV-2 , and LMOV-3 are available for use with
models LCS-CC-2 and LCS-CC-6 through LCS-CC-48
power supplies. On models LCS-CC-01 through
LCS-CC-03, use Overvoltage Protectors LHOV-4 and
LHOV-5.
Metered and Non-Metered Panels
IM-LCS-CC
Metered panel MP-5 and Non-metered panel P -5 are
available for use with Lambda rack adapters L R A -6 or
LRA-7.
260
3
T HEO RY OF OPERATION
G EN ERA L
The Lambda power supply consists of an AC input circuit and transformer; a bias supply consisting of an
auxiliary rectifier, and pre-regulator*; a drive supply consisting of a rectifier and filter**; a main regulator
circuit consisting of the main rectifier and filter, a series regulator, emitter follower driver, a current
comparator*, a voltage comparator*, an amplifier*, current and voltage sensing networks and a voltage
reference circuit*.
♦This circuit element is part of integrated circuit ( IC l) in the supply.
**LCS-CC-2 , LCS-CC-5-OV, LCS-CC-6 , and LCS-CC-01 only.
The circuit arrangement is shown in block diagram form, Figure 11. The circuitry is discussed with
reference to the block diagram and the schematic diagram.
FUNCTIONAL D ESCRIPTION
Single phase input power is applied to transformer T 1 through the input circuit which contains a
thermostat to protect the supply against over heating.
The main rectifier, a full wave rectifier, provides the power which is filtered by capacitor C 6 , and then
regulated via a series regulator and delivered to the output. Half-wave auxiliary rectifier C R l provides voltage
filtered by capacitor C l for the preregulator located in IC l. The reference element, powered by the preregulator,
provides a reference voltage for the current comparator and the voltage comparator. Full wave drive rectifier
CR23, CR24 provides voltage filtered by capacitor C34 for drivers Q l, Q 2 .
Constant voltage circuit operation is determined by changes in the load which cause a change in one input
to the voltage comparator. A second input to comparator is a reference voltage that is developed by a constant
current of 1 milliampere flowing in divider elements R 8 , and, as applicable, R20. The comparator compares the
output voltage change with the reference voltage resulting in an error signal at the output of the comparator.
The error signal from the comparator is then current amplified by drivers Q l and Q 2 . The amplified signal
from the drivers controls the voltage across the series regulators Q 6 through Q9, which function as the active
regulating elements in the supply.
* Current limit circuit operation for models LCS-CC-2 through LCS-CC-48 is determined by changes in
the load. The current comparator samples load current through current sensing resistor R25. When the voltage
drop across R25 increases to the preset voltage reference determined by R 6 , R9, R13, and R 21 , the current
comparator conducts. Thus, when the output current rating of the unit is exceeded, the current comparator
conducts, decreasing the current through drivers Q l and Q 2 , resulting in an increase of voltage across the series
regulator and a decrease of the output voltage, effectively limiting the output current to a safe value. The
current limit value is determined by fixed resistors R 6 , R25, R9, R 21 , and variable resistor R13.
When operating conditions approach short circuit, the output voltage decreases. Since the voltage
determined by R13 is porportional to the output voltage, when the output voltage decreases, the amplifier is
biased into turn on at lower and lower load currents until output voltage decreases to zero and current decreases
to a predetermined low value.
* The following theory applies to models LCS-CC-01 through LCS-CC-03.
Current limit circuit operation is determined by changes in the load. When load current increases above
the rated current value, the voltage drop across current limit potentiometer R13 increases causing the amplifier
to turn on. With the amplifier conducting the current to driver Q l and Q 2 , decreases, limiting the base current
to series regulators Q 6 through Q9 which results in an increase of voltage across the series regulators and a
decrease of the output voltage, effectively limiting the output current to a safe value. The current limit value is
determined by the factory setting of current limit potentiometer R13.
4
261
IM-LCS-CC
When operating conditions reach short circuit, the output voltage value decreases to zero and the current
remains at the current limit value.
OV CIRCUIT, FUNCTIONAL D ESCRIPTION (LCS-CC-5-OV ONLY)
When the power supply output voltage increases above zener breakdown voltage of CR28 (approximately
6.2 volts) and gate voltage of SCR 1 (approximately 0.6 volts), CR28 conducts and current is supplied to the
gate of SCR 1. S C R 1 fires, causing the power supply output voltage to drop.
IM L l'b l'C
262
5
OPERAT IN G INSTRUCTIONS
BASIC M ODE OF OPERATION
This power supply operates as a constant voltage source provided the load current does not exceed the
rated value at 40°C. For continuous operation, load current must not exceed the rating for each ambient
temperature and will remain limited to less than 110% of 40°C rating.
CONNECTIONS FOR OPERATION
NOTE: Make all connections to the unit before applying AC input power.
Ground Connections. The Lambda power supply can be operated either with negative or positive output
terminal grounded. Both positive and negative ground connections are shown in the diagrams for all suggested
output connections illustrated in this manual.
Connection Terminals. Make all connections to the supply at the terminal block on the rear of the supply. Apply
input power to terminals 1 and 2 ; always connect the ungrounded (hot) lead to terminal 1.
The supply positive terminal is brought out to terminal 6 . The supply negative terminal is brought out to
terminal 4. Recommended wiring of the power supply to the load and selection of wiring is shown in figures 1
through 10. Selection of proper wiring is made on the basis of load requirements. Make all performance checks
and measurements of current or voltage at the rear output terminals. Connect measuring devices directly to
terminals or use the shortest leads possible.
SUPPLY LOAD CONNECTIONS
Connections for Operation as a Constant Voltage Source
The output impedance and regulation of the power supply at the load may change when using the supply
as a constant voltage source and connecting leads of practical length are used. To minimize the effect of the
output leads on these characteristics, remote sensing is used. Recommended types of supply-load connections
with local or remote sensing are described in the following paragraphs.
Refer to figure 1 to determine voltage drop for particular cable length, wire size and current conditions.
Lead lengths must be measured from supply terminals to load terminals as shown in figure 2.
Local Sensing Connection, Figure 3. The local sensing connection is the connection suitable for applications
with relatively constant load.
Remote Sensing Connection. Figure 4. The remote sensing connection provides complete compensation for the
DC voltage drops in the connecting cables. Sensing leads should be a twisted pair to minimize AC pick-up.
Programmed Voltage Connections, Using External Resistor, Figure 5. Discrete voltage steps can be
programmed with a resistance voltage divider valued at 1000 ohms/volt and a shorting-type switch as shown in
Figure 5. When continuous voltage variations are required, use a variable resistor with the same 1000
ohms/volt ratio in place of the resistive voltage divider and shorting-type switch. Use a low temperature
coefficient resistor to assure most stable operation. Before programming, adjust programming resistor for zero
resistance.
As shown in figure 5, voltages can be programmed utilizing either local or remote sensing connections, as
desired.
r>
IM-LCS-CC
263
Programmed Voltage Connections Using Programming Voltage, Fig. 6 . The power supply voltage output can
be programmed with an externally connected programming power supply. The output voltage of the
programmed supply will maintain a one-to-one ratio with the voltage of the programming supply.
The programming supply must have a reverse current capability of 1.5 ma minimum.
Alternatively, when supplies with less than 1.5 ma reverse current capability are used, a resistor capable
of drawing 1.5 ma at the minimum programming voltage must be connected across the output terminals of the
supply. This programming supply must be rated to handle all excess resistor current at the maximum
programming voltage.
Connections for Series Operation
The voltage capability of LCS-CC power supplies can be extended by series operation. A maximum of 300
volts can be connected between either the +DC or -DC terminal and chassis ground.
Figure 7, and as applicable, 8 , shows the connections for either local or remote sensing in a series
connection where the voltage control of each unit functions independently to control the output.
Figure 7 applies only to the LCS-CC-01 through LCS-CC-03 power supplies. If a common load is used, the
maximum current rating of the unit with the lower current rating must not be exceeded.
Figure 8 shows the series connection applicable to the LCS-CC-2 through LCS-CC-48 power supplies. A
diode, having a current carrying capability equal to or greater than the maximum current rating of the supply,
must be used and connected as shown in figure 8 . The diode blocking voltage should be at least twice the
maximum rated output voltage of the supply. See table I, of “Specifications and Features” for power supply
current and voltage ratings.
Connections for Parallel Operation (Applicable only to LCS-CC-01 — LCS-CC-03)
The current capability of LCS-CC power supplies can be extended by parallel operation of LCS-CC power
supplies of equal* voltage capacities. Units “ M ” and “S ” are shown connected for parallel operation in figures 9
and 10. One power supply designated “ M ” unit controls its own output as well as the output of the second
power supply, designated the “S ” unit.
* For applications using supplies of unequal voltage ratings, consult factory for details of operation.
Unit S operates to regulate its current in a ratio to that of the M unit by comparing the current in its
internal sampling resistor with that current sampled by the master internal sampling resistor.
OPERATION AFTER PROTECTIVE D EVICE SHUTDOWN
Thermostat Shutdown
The thermostat opens the input circuit only when the temperature of the internal heat sink exceeds a
maximum safe value. The thermostat will automatically reset when the temperature of the heat sink decreases
to a safe operating value. After eliminating the cause(s) for overheating and allowing time for the power supply
to cool Lo a proper temperature, resume operation of the supply.
Overvoltage Shutdown
When the power supply output voltage increases above the overvoltage limit, SCRl will short circuit
output of the supply. After eliminating the cause(s) for overvoltage, resume operation of the supply by
momentarily interrupting the AC input circuit.
IM-LCS-CC
264
7
M AINTEN ANCE
G EN ER A L
This section describes trouble analysis routine, replacement procedures, calibration and test procedures
that are useful for servicing the Lambda LCS-CC power supply. A trouble chart is provided as an aid for the
troubleshooter. Refer to the section on specifications and features for the minimum performance standards.
TROUBLE A N A LY SIS
Whenever trouble occurs, systematically check fuse, primary power lines, external circuit elements, and
external wiring for malfunction before trouble shooting the equipment. Failures and malfunctions often can be
traced to simple causes such as improper jumper and supply-load connections or fuse failure due to metal
fatigue.
Use the electrical schematic diagram and block diagram, figure 12, as an aid to locating trouble causes.
The schematic diagram contains various circuit voltages that are averages for normal operation. Measure these
voltages using the conditions for measurement specified on the schematic diagram. Use measuring probes
carefully to avoid causing short circuits and damaging circuit components.
CH ECK IN G TRANSISTORS AND CAPACITORS
Check transistors with an instrument that has a highly limited current capability. Observe proper
polarity to avoid error in measurement. The forward transistor resistance is low but never zero; backward
resistance is always higher than the forward resistance.
For good transistors, the forward resistance for any junction is always greater than zero.
Do not assume trouble is eliminated when only one part is replaced. This is especially true when one
transistor fails, causing other transistors to fail. Replacing only one transistor and turning power on, before
checking for additional defective components could damage the replaced component.
When soldering semi-conductor devices, wherever possible, hold the lead being soldered with a pair of
pliers placed between the component and the solder joint to provide an effective heat sink.
NOTE: The leakage resistance obtained from a simple resistance check of a capacitor
is not always an indication of a faulty capacitor. In all cases the capacitors are shunted with
resistances, some of which have low values. Only a dead short is a true indication of a
shorted capacitor.
PRINTED CIRCUIT BOARD M AINTEN ANCE TECHNIQUES
1. If foil is intact but not covered with solder, it is a good contact. Do not attempt to cover with solder.
2 . Voltage measurements can be made from either side of the board. Use a needlepoint probe to penetrate
to the wiring whenever a protective coating is used on the wiring. A brass probe can be soldered to an alligator
clip adapted to the measuring instrument.
3. Wherever possible use a heat sink when soldering transistors.
4. Broken or damaged printing wiring is usually the result of an imperfection, strain or careless soldering.
To repair small breaks, tin a short piece of hook-up wire to bridge the break, and holding the wire in place, flow
solder along the length of wire so that it becomes part of the circuitry.
IM-LCS-CC
8
265
5.
When unsoldering components from the board never pry or force loose the part; unsolder the
component by using the wicking process described below:
a) Select a 3/16 inch tinned copper braid for use as a wick: if braid is not available, select AWG No. 14
or No. 16 stranded wire with 1/2 inch insulation removed.
b) Dip the wick in liquid rosin flux.
c) Place the wick onto the soldered connection and apply soldering iron onto the wick.
d) When sufficient amount of solder flows onto the wick, freeing the component, simultaneously
remove iron and wick.
TROUBLE CHART
The trouble chart is intended as a guide for locating trouble causes, and is used along with the schematic
diagram.
The operating conditions assumed for the trouble chart are as follows:
a) AC power of proper voltage and frequency is present at input terminals.
b) Either positive or negative terminal is connected to chassis ground.
c) The power supply is connected for constant voltage with local sensing. See schematic: dotted lines
indicate jumpers connected for local sensing operation.
TROUBLE SHOOTING CHART
Symptom
1. Zero volts DC output
2 . Unable to adjust
adjust
voltage
Probable Cause
Remedy
OUTPUT VOLTAGE control
turned fully CCW
Check OUTPUT VOLTAGE
control for proper
setting & correct as necessary.
Short circuit across out­
put of supply
Check load & load connec­
tions, correct as necessary.
Series regulator section
open
Check Q 6 through Q 9 and R25
through R28 for open, replace
as necessary.
Shorted CR7
Check CR7 for short,
replace as necessary.
Current sensing resistor open
Check R25 for open. R 6 for short
Aux. rectifier C R 1 open
Check C Rl for open, replace
as necessary.
Open CR 8 , CR9, or R 1
Check & replace as necessary.
Damaged OUTPUT VOLTAGE
control
Check R8 for short or
open, replace as
necessary.
IM-LCS-CC
266
9
TROUBLE SHOOTING CHART
Sym ptom
3. High ripple at
line frequency or
twice line fre­
quency & unregu­
lated DC output
Probable Cause
Remedy
Series regulator tran­
sistors shorted
Check and replace as nec­
essary; Q l, Q 2 , Q 6 through Q 9
Defective main rectifier
causes ripple at twice
line frequency.
Check for open and/or
short CR 2 , CR3, CR4 & CR 5 .
4. Same as 3, ex­
cept intermittent
Foreign matter fallen
into unit
Check for loose bench
hardware & wire clippings
that may have fallen
through cover.
5. High ripple at
frequency other
than line or twice
line frequency
Oscillation due to defec­
tive component in filter
network
Check for open C14, C 2 &
check for open and/or
short in C ll & R 2 . Replace
defective component.
6 . Large spikes at
Capacitor C15 and as app­
licable, C16 open.
Replace C15 (and C16).
output
PERFORM ANCE CHECKS
Check the ripple and regulation of the power supply using the test connection diagram shown in figure 12.
Use suggested test equipment or equivalent to obtain accurate results. Refer to Specifications and Features for
minimum performance standards.
Set the differential meter, DVM (John Fluke Model 891A or equivalent) to the selected power supply
operating voltage. Check the power supply load regulation accuracy while switching from the load to no-load
condition. Long load leads should be a twisted pair to minimize AC pick-up.
Use a Variac to vary the line voltage from 105-132 or 132-105 volts AC and check the power supply line
regulation accuracy on the DVM differential meter.
Use a VTVM, Ballantine 320 or equivalent, to measure rms ripple voltage of the power supply DC output.
Use oscilloscope to measure peak-to-peak ripple voltage of the power supply DC output.
ADJUSTM ENT OF CALIBRA T IO N CONTROL R13
Whenever Q 6 through Q9, R 6 , R25 through R28, R9, R13, R 21 , or IC l are replaced, and voltage and
current indications do not reflect maximum ratings, adjust R13 as follows. The adjustment procedure requires
that the power supply is removed from associated equipment, is at an ambient temperature of 25-30°C, and is
stabilized and not operating.
1. Remove AC input power to the supply.
2 . Break seal on wiper of R13 from resistor housing and turn to full CW position.
10
IM-LCS-CC
267
3. Operate power supply for constant voltage with local sensing connected as shown in figure 3 , with no
external load.
4.* Turn voltage adjust control until minimum rated output voltage is obtained.
5.* Apply load so that output current is 110% of 40°C rating for the unit.
6 .* Using an oscilloscope, Tektronix 503 or equivalent, observe output voltage while adjusting R13 in
CCW direction. Adjust R13 until output ripple increases sharply and oscilloscope pattern changes.
7.* After adjustment is completed, remove AC power input to the supply and use glyptol sealant to seal
wiper of R13 to resistor housing.
8 .* After sealing, check setting and repeat adjustment procedure if required.
* Perform alternate steps 4A through 9A for adjustment of R13 on models LCS-CC-01 — LCS-CC-03.
4A. Turn voltage adjust control until rated output is obtained.
5A. Apply load so that output current is 110% of 40°C rating for the unit.
6 A. Using an oscilloscope, Tektronix 503 or equivalent, observe unit output voltage while adjusting R13
in a CCW direction. Adjust R13 until output ripple increases sharply and oscilloscope pattern changes.
7A. Place a DC ammeter of appropriate scale across output terminals 4 and 6 of the supply. The meter
indication shall be a maximum of 115% of 40°C rating for the unit.
8 A. After adjustment is completed, remove AC input power to the supply and use glyptol sealant to seal
wiper of R13 to resistor housing.
9A. After sealing, check setting and repeat adjustment procedure if required.
SERVICE
When additional instructions are required or repair service is desired, contact the nearest office of the
Lambda Electronics Corp. where trained personnel and complete facilities are ready to assist you.
Please include the power supply model and serial number together with complete details of the problem.
On receipt of this information Lambda will supply service data or advise shipping for factory repair service.
All repairs not covered by the warranty will be billed at cost and an estimate forwarded for approval
before work is started.
PA R T S O R D E R IN G
Standard components and special components used in the Lambda power supply can be obtained from the
factory. In case of emergency, critical spare parts are available through any Lambda office.
The following information must be included when ordering parts:
1. Model number and serial number of power supply and purchase date.
2 . Lambda part number.
3. D e sc rip tio n of p a rt together w ith c irc u it d e s ig n a tio n .
4. If part is not an electronic part, or is not listed, provide a description, function, and location of the part.
IM-LCS-CC
n
268
PARTS LIST
The electrical parts located on Lambda models LCS-CC-2 — LCS-CC-48 and
LCS-CC-01 — LCS-CC-03 are listed here. Parts common to a group of models are listed first.
Unique parts of individual models within the group are listed separately, by model,
immediately following the group common-parts listing. In addition, there are separate
listings of parts for the “ J ” and “ V ” options and LMOV, LHOV, MP-5, and P-5 accessories.
COMMON PARTS
M ODELS LCS-CC-2 - LCS-CC-6
LAMBDA
NO.
UNIT
PRICE
CIRC.
DESIG.
Cap., elect., 40 mf
-10+75%, 25 vdc
Cap., mylar, 0.047 mf
±10%, 200 vdc
Not assigned
CBP-40-036
$ 1.20
Q18
R1
CGL-47-018
.39
Cap., mylar, 0.1 m f
±10%, 200 vdc
Cap., elect., 60,000 m f
-10+100%, 15 vdc
Not assigned
Cap., mylar, 1.0 mf
±10%, 200 vdc
Cap., mylar, 0.033 m f
±10%, 400 vdc
Cap., mylar, 0.0068 mf
±10%, 200 vdc
Not assigned
CAM-10-012
.65
CBT-60-036
10.50
Cap., elect., 1,500 m f
-10+100%, 25 vdc
Same as C5
CBS-15-078
CIRC.
DESIG.
Cl
C2
C3,
C4
C5
C6
C7
C9
CIO
C ll
C12,
C13
C14
C15,
C16
C17
thru
C33
C34
CR1
CR2,
CR3
CR4
thru
CR7
CR8
CR9
CR10,
CR11
CR12
C R 13
CR14
thru
CR21
CR22
CR23,
CR24
CR25
thru
CR27
IC1
DESCRIPTION
R2
CGN-10-003
1.55
CGL-33-009
.50
CGK-68-001
.34
R ll
R12
CBR-90-040
2.27
FBL-00-030
FBL-00-083
1.40
2.75
R13
R l 4,
R15
R16
R17
thru
R19,
R22
R23
R24
R25
thru
R28
R29
thru
R39,
R41
thru
R49
R50
Same as CR1
Not assigned
Same as CR1
Not assigned
Same as CR1
Not assigned
FBM-Z139
FBL-00-094
.27
.99
R51
SI
Q2
Q3
Q6
Transistor, NPN
FBN-36485
thru
Q9
Q lO
thru
Q17
DESCRIPTION
Transistor, NPN
Res., film, 8,660 ohms
±1%, >/4 w
Res., comp., 100 ohms
±10%, >/4 w
Res., comp., 560 ohms
±10%, 1 w
Res., comp., 1,000 ohms
±10%, V* w
Res., comp., 47 ohms
±10%, V* w
Not assigned
Res., film, 10,000
ohm s± l% , V* w
Res., comp., 36
megohms ±5%, V* w
Not assigned
Res., comp., 68,000
ohm s±10%, Vi w
Res., var., cermet,
5,000 ohms ±10%, 1 w
Not assigned
LAMBDA
NO.
UNIT
PRICE
FBN-L110
DCS-87-071
$ 3.25
.25
DCB-1011
.10
DGB-5611
.24
DCB-1021
.10
DCB-4701
.06
DCT-10-047
.20
DCB-3665
.19
DCB-6831
.10
DRS-50-010
1.50
Same as R6
Not assigned
Res., comp., 4,700
ohms±10%, V4 w
Not assigned
Res., ww, 0.1 ohm
±5%, 5 w
DCB-4721
.24
DFM-10-074
.50
DFM-40-058
1.32
FKA-148-030
1.41
Not assigned
Res., ww, 0.4 ohm
±2%, 3 w
Same as R5
Thermostat
UNIQUE PARTS
M ODEL LCS-CC-2
Not assigned
FBT-00-031
FBN-L109
FBN-L144
thru
Q5
2.50
Not assigned
Rectifier, zener diode
Rectifier
R7
R9
R10
Not assigned
Cap., elect., 900 m f
-10+100%, 35 vdc
Rectifier
Rectifier
R3,
R4
R5
R6
Integrated circuit
Transistor, NPN
Transistor, NPN
Not assigned
Qi
COMMON PARTS (Cont.)
M ODELS LCS-CC-2 — LCS-CC-6 (Cont.)
9.75
2.25
3.81
C8
R8
R20
R21
4.13
R40
Tl
Not assigned
LCSCC-1
269
Not assigned
Res., var., ww, 2,200
ohm s±5%, 2 w
Res., film, 1,470 ohms
±1%, 1A w
Res., film, 6,800 ohms
±2%, % w
Not assigned
Transformer
DNS-22-056
2.50
DCS-15-056
.45
DCS-68-032
.30
ABA-LCSCC-2
42.00
UNIQUE PARTS (Cont.)
MODEL LCS-CC-5-0V
CIRC.
DESIG.
C8
CR28
R8
R20
R21
R40
SCR1
TI
DESCRIPTION
Cap., elect., 10 m f
+.20%, 10 vdc
Rectifier, zener diode
Res., var., ww, 4,500
o h m s +.5%, 2 w
Res., film, 3,830 ohms
jfc.1%, Vi w
Res., film, 15,000
o h m s +.5%, Vi w
Res., comp., 100 ohms
± 1 0 % , V< w
Rectifier, silicon
controlled
Transformer
COMMON PARTS (Cont.)
MODEL LCS-CC-12 and LCS-CC-15 (Cont.)
LAMBDA
NO.
UNIT
PRICE
CIRC.
DESIG.
CBP-10-027
$ 2.00
FBM-Z140
DNS-45-050
.27
3.00
DCS-38-0 60
1.50
DCT-15-062
.15
DCB-1011
.10
CR22
IC1
Qi
Q2
Q3
thru
.Q5
Q6
thru
Q9
R1
FBP-00-036
4.20
R2
ABA-LCSCC-5
42.00
R3,
R4
R5
M O D E L LCS-CC-6
C8
R8
R20
R21
R40
TI
Not assigned
Res., var., ww, 4,500
ohmsjL5%, 2 w
Res., film, 3,830 ohms
+.1%, */« w
Res., film, 15,000 ohms
J:5%, >/« w
Not assigned
Transformer
DNS-45-050
3.00
R6
DCS-38-060
1.50
R7
R8
DCT-15-062
.15
ABA-LCSCC-5
42.00
R9
R10
R ll
R12
COMMON PARTS
M ODELS LCS-CC-12 and LCS-CC-15
R13
Cl
C2
C3,
C4
C5
C6
C7,
C8
C9
CIO
C ll
C12,
C13
C14
C15
CR1
CR2
thru
CR5
CR6,
CR7
CR8
CR9
CR10,
C R ll
CR12
CR13
CRll
thru
CR21
Cap., elect., 40 m f
-10+75%, 25 vdc
Cap., mylar, 0.047 m f
.+10%, 200 vdc
Not assigned
CBP-40-036
1.20
CGL-47-018
.39
Cap., mylar, 0.1 mf
.+10%, 200 vdc
Cap., elect., 22,000 m f
-10+100%, 40 vdc
Not assigned
CAM-10-012
Cap., mylar, 1.0 mf
±10%, 200 vdc
Cap., mylar, 0.033 mf
+.10%, 400 vdc
Cap., mylar, 0.0068 mf
A10%, 200 vdc
Not assigned
CGN-10-003
1.55
CGL-33-009
.50
CGK-68-001
.34
Cap., elect., 900 mf
-10+100%, 35 vdc
Same as C5
Rectifier
Rectifier
CBR-90-040
2.27
FBL-00-030
FBL-00-083
1.40
2.75
CBT-22021
.65
R14,
R15
R16
R17
thru
R19
R20
12.12
R21
R22
R23
R24
R25
thru
R28
SI
DESCRIPTION
Rectifier, zener diode
Integrated circuit
Transistor, NPN
Transistor, NPN
Not assigned
LAMBDA
NO.
UNIT
PRICE
FBM-Z139
FBT-00-031
FBN-L109
FBN-36485
$
.27
9.75
2.25
4.13
Same as Q2
Res., film, 8,660 ohms
jfc.1%, Vi w
Res., comp., 100 ohms
.+10%, Vi w
Res., comp., 1,800 ohms
Jfc.10%, 1 w
Res., comp., 1,000
ohms +.10%, Vi w
Res., comp., 47 ohms
.+10%, Vi w
Not assigned
Res., var., ww, 13,000
ohms, _+5%, 2 w
Res., film, 10,000
ohm s± l% , Vi w
Res., comp., 36
megohms+.5%, Vi w
Not assigned
Res., comp., 68,000
o h m s +.10%, Vi w
Res., var., cermet,
5,000 ohms +.10%, l'w
Not assigned
DCS-87-071
.25
DCB-1011
.10
DGB-1821
.18
DCB-1021
.10
DCB-4701
.06
DNT-13-032
5.75
DCT-10-047
.20
DCB-3665
.19
DCB-6831
.10
DRS-50-010
1.50
DCS-91-054
1.50
DCT-50-054
.45
DCB-4721
.24
Same as R6
Not assigned
Res., film, 9,090 ohms
jhl% , Vi w
Res., film, 50,000 ohms
+1%, »/i w
Not assigned
Res., comp., 4,700 ohms
.+10%, Vi w
Not assigned
Res., ww, 0.22 ohm
j+5%, 5 w
Thermostat
DFM-22-045
1.00
FKA-142-015
2.50
UNIQU E PARTS
M ODEL LCS-CC-12
TI
Transformer
ABA-LCSCC-12
42.00
M O D E L LCS-CC-15
Not assigned
TI
Same as CR1
Not assigned
Same as C R l
Transformer
ABA-LCSCC-15
42.00
COMMON PARTS
MODELS LCS-CC-20 - LCS-CC-48
Not assigned
Same as C R 1
Not assigned
Cl
Cap.. elect.. 10 m f
-10 +75%, 25 vdc
CBP-40 036
1.20
C2
Cap., mylar, 0.047 mf
CGL-47-018
.39
+.10%, 200 vdc
270
LCSCC-2
COMMON PARTS (Cont.)
MODELS LCS-CC-20 - LCS-CC-48 (Cont.)
CIRC.
DESIG.
C3,
C4
C5
C7,
C8
C9
CIO
C ll
C12,
Cl 3
C15
CR1
CR2
thru
CR5
CR6,
CR7,
CR9
CR10,
CR11
CR12
CR13
CR14
thru
CR21
CR22
IC l
Q3
thru
Q5
R1
R2
R5
R6
R7
R9
R10
R ll
R12
R13
R14,
R15
R16
R17
thru
R19,
R22
R23
R24
SI
DESCRIPTION
LAMBDA
NO.
UNIQUE PARTS (Cont.)
MODEL LCS-CC-20 (Cont.)
UNIT
PRICE
Not assigned
C14
Cap., mylar, 0.1 mf
+.10%, 200 vdc
Not assigned
CAM-10-012
Cap., mylar, 1.0 mf
±10%, 200 vdc ...
Cap., mylar, 0.033 m f
+.10%, 400 vdc
Cap., mylar, 0.0068 mf
+.10%, 200 vdc
Not assigned
CGN-10-003
1.55
CGL-33-009
.50
CR8
Ql
Q2,
Q6
thru
Q9
R3
CGK-68-001
.34
R4
$
.65
R8
R20
Same as C5
Rectifier
Rectifier
FBL-00-030
FBL-00-054
1.40
1.50
R21
R25
thru
R28
T1
Not assigned
DESCRIPTION
Cap., elect., 500 m f
-10+100%, 60 vdc
Rectifier
Transistor, NPN
Transistor, NPN
Res., ww, 2,000 ohms
+.3%, 3 w
Res., comp., 4,700 ohms
+.10%, 1 w
Res., var., ww, 15,000
o h m s +.5%, 2 w
Res., film, 15,000 ohms
+.5%, V* w
Res., film, 66,500
o h m s +.1%, V* w
Res., ww, 0.39 ohm
+.5%, 5 w
Transformer
Same as CR1
C6
C14
Rectifier, zener diode
Integrated circuit
Not assigned
FBM-Z139
FBT-00-031
.27
9.75
Res., film, 8,660 ohms
j+i%, »/« w
Res., comp., 100 ohms
.+10%, V< w
Res., comp., 1,000
o h m s +.10%, V* w
Res., comp., 47 ohms
.±.10%, >/« w
Not assigned
Res., film, 10,000 ohms
A l% , >/4 w
Res., comp., 36 megohms
+.5%, V* w
Not assigned
Res., comp., 68,000
ohms ±.10%, V4 w
Res., var., cermet,
5,000 o h m s +.10%, 1 w
Not assigned
DCS-87-071
.25
DCB-1011
.10
DCB-1021
.10
DCB-4701
.06
CR8
Ql
Q2,
Q6
thru
Q9
R3
R4
R8
R20
DCT-10-047
.20
DCB-3665
.19
DCB-6831
.10
DRS-50-010
R21
R25
thru
R28
T1
1.50
UNIT
PRICE
CBR-50-041
$ 2.27
FBL-00-030
FBN-L109
FBN-36220
1.40
2.25
2.85
DFS-20-032
.87
DGB-4721
.24
DNT-15-063
4.90
DCT-15-062
.15
DCT-67-074
.20
DFM-39-046
1.81
ABA-LCSCC-20
42.00
C6
C14
Res., comp., 4,700 ohms
.+10%, Vi w
Not assigned
DCB-4721
Thermostat
FKA-142-01 5
CR8
Ql
Q2,
Q6
thru
Q9
R3
.24
2.50
R4
M O D E L LCS-CC-20
CBT-13-023
11.67
Cap., elect., 13,000 mf
-10 +100%, 60 vdc
Cap., elect., 500 m f
-10+100%, 60 vdc
Rectifier
Transistor, NPN
Transistor, NPN
Res., ww, 2,000 ohms
-±■3%, 3 w
Res., comp., 4,700 ohms
±10% , 1 w
Res., var., ww, 15,000
o h m s+.5%, 2 w
Res., film, 20,000 ohms
± i% , Vi w
Res., film, 100,000
o h m s +.1%, V* w
Res., ww, 0.39 ohm
A5%, 5 w
Transformer
CBT-13-023
11.67
CBR-50-041
2.27
FBL-00-030
FBN-L109
FBN-36220
1.40
2.25
2.85
DFS-20-032
.87
DGB-4721
.24
DNT-15-063
4.90
DCT-20-053
.20
DCV-10-027
.45
DFM-39-046
1.81
ABA-LCSCC-24
42.00
M O DEL LCS-CC-28
Same as R6
Not assigned
Cap., elect., 13,000 mf
-10 +100%, 60 vdc
LAMBDA
NO.
M ODEL LCS ■CC-24
Not assigned
Same as CR1
Not assigned
UNIQUE PARTS
C6
CIRC.
DESIG.
R8
Cap., elect., 13,000 mf
-10 +100%, 60 vdc
Cap., elect., 500 m f
-10+100%, 60 vdc
Rectifier
Transistor, NPN
Transistor, NPN
CBT-13-023
11.67
CBR-50-041
2.27
FBL-00-030
FBN-L109
FBN-36220
1.40
2.25
2.85
Res., ww, 2,000 ohms
+3%, 3 w
DFS-20-032
.87
Res., com p., 4,700 ohms
±10%, 1 w
Res., var., ww, 15,000
DGB-4721
.24
ohms j+5%, 2 w
LCSCC-3
271
DNT-15-063
4.90
COMMON PARTS (Cont.)
MODELS LCS-CC-01 - LCS-CC-03 (Cont.)
UNIQUE PARTS (Cont.)
M O DEL LCS-CC-28 (Cont.)
CIRC.
DESIG.
R20
R21
R25
thru
R28
T1
LAMBDA
NO.
UNIT
PRICE
CIRC.
DESIG.
Res., film, 20,000 ohms
±1%, V4 w
Res., film, 121,000
ohm s± l% , Vi w
Res., ww, 0.39 ohm
±5%, 5 w
DCT-20-053
$
Transformer
ABA-LCSCC-28
CR7
CR8
thru
CR11
CR12
CR13
CR14,
CR15
CR16
CR17,
CR20,
CR21,
CR22
IC1
Q3,
Q4,
Q 10
thru
Q17
R1
DESCRIPTION
.20
DCV-12-029
.20
DFM-39-046
1.81
42.00
M O DEL LCS-CC-48
C6
C14
CR8
Q1
Q2,
Q6
thru
Q9
R3
R4
R8
R20
R21
R25
thru
R28
T1
Cap., elect., 4,000 mf
-10+100%, 100 vdc
Cap., elect., 200 mf
-10+100%, 100 vdc
Rectifier
Transistor, NPN
Transistor, NPN
CBS-40-053
11.00
CBR-20-082
5.75
FBL-00-036
FBN-L115
FBN-35902
.60
2.75
6.15
Res., ww, 5,600 ohms
±3%, 3 w
Res., ww, 9,000 ohms
±3%, 3 w
Res., var., ww, 23,000
ohms ±5%, 2 w
Res., film, 40,200 ohms
±1%, V* w
Res., film, 121,000 ohms
±1%, Vi w
Res., ww, 0.5 ohm
±5%, 3 w
DFS-56-053
Transformer
ABA-LCSCC-48
R2
.60
R5
DFS-90-071
DNT-2 3-067
5.50
R6
DCT-40-058
.20
R7
R9
DCV-12-029
.20
DFM-50-073
.50
R IO
R ll
R12
42.00
R13
COMMON PARTS
MODELS LCS-CC-01 - LCS-CC-03
Cl
C2
C3,
C4
C5
C7,
C8
C9
CIO
C ll
C l 2,
C13
C15,
C16
C17
thru
C33
CR1
CR2,
CR3
CR1
R14,
R15
R16
Cap., elect., 40 m f
-10+75%, 25 vdc
Cap., mylar, 0.047 mf
±10%, 200 vdc
Not assigned
CBP-40-036
1.20
CGL-47-018
.39
Cap., mylar, 0.1 mf
±10%, 200 vdc
Not assigned
CAM-10-012
.65
Cap., mylar, 1.0 mf
+.10%, 200 vdc
Cap., mylar, 0.033 mf
±10%, 400 vdc
Cap., mylar, 0.0068 mf
±10%, 200 vdc
Not assigned
CGN-10-003
1.55
CGL-33-009
.50
CGK-68-001
.34
SI
1.40
1.50
Not assigned
thru
CR6
272
Same as CR2
Same as CR1
Not assigned
Same as CR1
Not assigned
Same as CR2
Not assigned
Rectifier, zener diode
Integrated circuit
Not assigned
FBM-Z139
FBT-00-031
.27
9.75
Res., film, 8,660 ohms
±1 %, Vi w
Res., comp., 100 ohms
+.10%, Vi w
Res., comp., 1,000 ohms
±.10%, Vi w
Res., film, 249 ohms
±1%, V* w
Not assigned
Res., film, 10,000 ohms
±1%, V4 w
Res., comp., 36
megohms ±5%, Vi w
Not assigned
Res., comp., 68,000
ohms ±10%, Vi w
Res., var., cermet,
100 ohm s± l0% , 1 w
Not assigned
DCS-87-071
.25
DCB-1011
.10
DCB-1021
.10
DCR-25-034
.50
DCT-10-047
.20
DCB-3665
.19
DCB-6831
.10
Res., comp., 470 ohms
±10%, Vi w
Not assigned
DCB-4711
Thermostat
FKA-142-015
DRR-10-010
1.90
.10
2.50
CBT-60-036
10.50
CBS-15-078
2.50
CBR-90-040
2.27
C R 23 ,
CR24
Rectifier
FBL-00-094
.99
Q1
Q2
Transistor, NPN
FBN-L109
2.25
Transistor, NPN
FBN-36485
4.13
C34
FBL-00-030
FBL-00-051
UNIT
PRICE
Cap., elect., 60,000 mf
-10 +100%, 15 vdc
Cap., elect., 1,500 mf
-10+100%, 25 vdc
Cap., elect., 900 m f
-10+100%, 35 vdc
Not assigned
C14
Not assigned
LAMBDA
NO.
UNIQUE PARTS
M O DEL LCS-CC-01
C6
Same as C5
Rectifier
Rectifier
R20
thru
R22,
R24,
R29
thru
R38,
R40
thru
R49
DESCRIPTION
CR18,
C R 19
LCSCC-4
UNIQUE PARTS (Cont.)
MODEL LCS-CC-01 (Cont.)
CIRC.
DESIG.
Q5
Q6
thru
Q9
Q18
R3
R4
R8
R17
thru
R19,
R23
R25
thru
R28
R39
R50
R51
Tl
DESCRIPTION
LAMBDA
NO.
UNIQUE PARTS (Cont.)
MODEL LCS-CC-03 (Cont.)
UNIT
PRICE
Not assigned
Same as Q2
Transistor, NPN
Res., comp., 1,000 ohms
+.10%, 1 w
Res., ww, 150 ohms
J l3%, 3 w
Res., var., ww, 9,000
o h m s +.5%, 2 w
Not assigned
CIRC.
DESIG.
R3
FBN-L110
DGB-1021
$ 3.25
.15
DFR-15-015
.15
DNS-90-058
2.75
R4
R8
R17
R18
R19
R23
Res., ww, 0.22 ohm
+.5%, 5 w
DFM-22-045
1.00
Res., film, 100,000
o h m s +.1%, V4 w
Res., ww, 0.8 ohm
+.2%, 3 w
Res., comp., 1,000 ohms
_+10%, V* w
Transformer
DCV-10-027
.45
DFM-80-062
.65
DCB-1021
.10
ABA-LCSCC-01
R25
thru
R28
R39
Tl
Cap., elect., 22,000 m f
-10+100%, 40 vdc
Cap., elect., 500 m f
-10+100%, 60 vdc
Rectifier
R4
R8
R17
R18
R19
R23
R25
thru
R28
R39
Tl
DRT-40-047
DCB-2211
.10
DCV-10-027
.45
DFM-91-060
.95
DCB-2241
.10
ABA-LCSCC-03
FBL-00-030
1.40
Transistor, NPN
Transistor, NPN
Same as Q 1
Same as Q2
FBN-L109
FBN-36485
2.25
4.13
On all LCS-CC models with suffix “ V ” ,
capacitor CIO and transformer T l change.
Part no. change for CIO is listed here. For
transformer T l used on these models, see
standard LCS-CC model patts list for the
standard transformer part no. and add
suffix “ G ” to the part no. Price for T l
does not change.
Res., comp., 3,300
o h m s +.5%, 1 w
Not assigned
Res., var., ww, 23,000
ohms ±5%, 2 w
Same as R3
Res., comp., 820 ohms
.+10%, lA w
Res., comp., 220 ohms
+.10%, Vi w
Not assigned
Res., ww, 0.5 ohm
+.5%, 3 w
DGB-3325
.36
A LL MODELS
Res., film, 100,000
ohm s± l% , V* w
Transformer
DCV-10-027
5.50
DCB-8211
.06
DCB-2211
.10
DFM-50-073
.50
ABA-LCSCC-02
.45
42.00
11.67
CBR-20-082
5.75
FBL-00-030
1.40
Ql
Q2
Qf>
Transistor, NPN
Transistor, NPN
Transistor, NPN
FBN-Ll If)
FBN-35902
Q6
thru
Q9
Transistor, NPN
2.75
6. i r>
2.25
FBN-L109
FBN-36220
4.75
.06
2.27
DNT-23-067
.13
DCB-8211
CBR-50-041
CBT-13-023
CR18,
CR19
$
12.12
Cap., elect., 13,000 m f
-10+100%, 60 vdc
Cap., elect., 200 mf
-10+100%, 100 vdc
Rectifier
C14
DGB-1031
42.00
On all LCS-CC models with suffix “ J ” ,
transformer T I changes. For transformer T I
used on these models, see standard LCS-CC
model parts list for standard transformer
part no. and add suffix “ J ” to the part no.
Price for T I does not change.
42.00
M O DEL LCS-CC-03
C6
Res., comp., 220,000
o h m s +.10%, Vi w
Transformer
UNIT
PRICE
CBT-22-021
C14
CR18,
CR19
Q1
Q2
Q5
Q6
thru
Q9
R3
Res., comp., 10,000
o h m s +.10%, 1 w
Not assigned
Res., var., cermet, 40,000
ohms +.10%, 2 w
Same as R3
Res., comp., 820 ohms
+.10%, V4 w
Res., comp., 220 ohms
A10%, Vi w
Res., film, 100,000
o h m s +.1%, V4 w
Res., ww, 0.91 ohm
Jt2%, 3 w
LAMBDA
NO.
PARTS F O R “ J ” OPTION
M O DEL LCS-CC-02
C6
DESCRIPTION
PARTS FO R “ V " OPTION
CIO
Cap., paper, 0.01 mf
+.10%, 1000 vdc
CAL-10-021
1 77
PARTS FO R O V ERV OLT AGE
PROTECTOR ACCESSORY M ODELS
LMOV-1, LMOV-2, LMOV-3, LHOV-4, LHOV-5
COMMON PARTS
Cl
Ql
R3
R4
R5,
R6
R8
R 10
SCR1
Cap., mylar, 0.01 mf
.±20%, 80 vdc
Transistor, NPN
Res., film, 200 ohms
+.5%, xh w
Res., thermistor, 425
ohms ±5%, lVi w
Res., comp., 1,200 ohms
+.10%, l/t w
Res., comp., 15,000
ohms ±.10%, Vi w
Same as R5
Rectifier, silicon
controlled
CGL-10-008
.50
FBN-L102
DCR-20-010
2.40
.20
DKR-43-00 4
1.52
DEB-1221
.12
DEB-1531
.12
FBP-00-009
6.00
U N IQ U E PA RTS
MODEL LMOV-1
2.85
Q2
LCSCC-5
273
Transistor, PNP
FBN-L103
1.76
PARTS FO R METERED AND
UNIQUE PARTS (Cont.)
MODEL LMOV-1 (Cont.)
NON-METERED PANEL ACCESSORIES
M ODELS MP-5, P-5
CIRC.
DESIG.
R1
R2
R7
R9
DESCRIPTION
Res., var., ww, 2,000
ohms ±.10%, 1 w
Res., film, 560 ohms
+.2%, V4 w
Res., comp., 33 ohms
±.5%, v< w
Not assigned
LAMBDA
NO.
UNIT
PRICE
DNS-20-034
$ 3.00
DCR-56-002
.65
DCB-3305
.15
CIRC.
DESIG.
C l,
C2
FI
Ml *
M l*
M O DEL LMOV-2
Q2
R1
R2
R7
R9
Transistor, PNP
Res., var., ww, 5,000
o h m s +.10%, 1 w
Res., film, 1,470 ohms
+.1%, lA w
Res., comp., 33 ohms
+.5%, Vi w
Not assigned
FBN-L103
DNS-50-036
1.50
3.15
DCS-15-031
.30
DCB-3305
.15
R2
R7
R9
Transistor, PNP
Res., var., ww, 20,000
o h m s +.10%, 1 w
Res., film, 4,700 ohms
+.2%, xh w
Res., comp., 39 ohms
_+5%, V4 w
Res., comp., 22 ohms
A10%, \h w
M l*
M l*
M l*
M l*
M O DEL LMOV-3
Q2
R1
M l*
FBN-L114
DNT-20-010
3.50
2.85
DCS-47-028
.30
DCB-3905
.15
DEB-2201
.12
M2*
M2*
M2*
M2*
M2*
M O DEL LHOV-4
Rl
Q2
Rl
R2
R7
R9
Transistor, PNP
Res., var., ww, 10,000
o h m s +.10%, 1 w
Res., film, 560 ohms
±.2%, Vi w
Res., comp., 33 ohms
+.5%, *A w
Res., comp., 22 ohms
±.10%, lA w
FBN-L114
DNT-10-04 5
3.50
3.75
DCR-56-002
.65
DCB-3305
.15
DEB-2201
.12
R1
R1
R1
R1
M ODEL LHOV-5
Q2
Rl
R2
R7
R9
Transistor, PNP
Res., var., ww, 20,000
ohms±.10%, 1 w
Res., film, 560 ohms
±.2%, x/i w
Res., comp., 33 ohms
±.5%, lA w
Res., comp., 22 ohms
±.10% ,
w
FBN-L114
DNT-20-010
3.50
2.85
DCR-56-002
.65
DCB-3305
.15
DEB-2201
.12
R1
R1
SI
XF1
*
DESCRIPTION
LAMBDA
NO.
UNIT
PRICE
Cap., tant., 2.5 mf
CBN-25-010
-15 + 7 5%, 100 vdc (ALL)
Fuse, 7 A, 3AG,
FFC-07-000
SLO-BLO (A LL)
Voltmeter, 0-5 vdc
EBN-50-003
(LCS-CC-2)
Voltmeter, 0-8 vdc
EBN-80-005
(LCS-CC-5-0V, LCS-CC-6,
LCS-CC-01)
Voltmeter, 0-15 vdc
EBP-15-017
(LCS-CC-12)
Voltmeter, 0-20 vdc
EBP-20-014
(LCS-CC-15, LCS-CC-02)
Voltmeter, 0-25 vdc
EBP-25-018
(LCS-CC-20)
Voltmeter, 0-40 vdc
EBP-40-013
(LCS-CC-24, LCS-CC-28,
(LCS-CC-03)
Voltmeter, 0-60 vdc
EBP-60-015
(LCS-CC-48)
Ammeter, 0-20 adc
EDP-20-015
(LCS-CC-2 - LCS-CC-12)
Ammeter, 0-15 adc
EDP-15-014
(LCS-CC-15, LCS-CC-20,
LCS-CC-01)
Ammeter, 0-10 adc
EDP-10-013
(LCS-CC-24, LCS-CC-28)
Ammeter, 0-6 adc
EDN-60-018
(LCS-CC-48, LCS-CC-02)
Ammeter, 0-5 adc
EDN-50-021
(LCS-CC-03)
Res., var., ww, 2,200
DNS-22-053
ohms +.5%, 2w (LCS-CC-2)
Res., var., ww, 4,500
DNS-45-059
ohms ±5%, 2w
(LCS-CC-5-OV, LCS-CC-6)
Res., var., ww, 9,000
DNS-90-051
ohms +.5%, 2w (LCS-CC-01)
Res., var., ww, 13,000
DNT-13-031
ohms ±5%, 2w
(LCS-CC-12, LCS-CC-15)
Res., var., ww, 15,000
DNT-15-068
ohms ±5%, 2w
(LCS-CC- 20—LCS-CC-28)
Res., var., ww, 23,000
DNT-23-069
ohms +.5%, 2w
(LCS-CC-48, LCS-CC-02)
Res., var., cermet, 40,000 DRT-40-040
ohms ±10%, 2w
(LCS-CC-03)
Switch, SPST(All)
FDA-11-040
Fuseholder (All)
HRK-00-007
This part only used on MP-5
$ 1.80
.40
16.45
16.45
16.45
16.45
16.45
16.45
16.45
16.45
16.45
16.45
16.45
16.45
1.70
2.90
2.85
3.30
12.25
15.15
5.80
2.22
1.60
PARTS FO R METERED AND
NON-METERED PANEL ACCESSORIES
WITH “ V " OPTION
FI
DS1 Res.
274
On all metered and non-metered panels
with suffix “ V ” , fuse F I changes and a
resistor is added in series with pilot light
DS1. Parts nos. for FI and DSl-Res. are
listed here.
Fuse, 4A, 3AG, SLO BLO FFC-0-1-000
Res., comp , 120,000
DEB-1241
ohms ±10%, Ww
LCSCC-6
.70
.12
Figure 1. Cable Connection Chart
Figure 2. Cable Length "A" in Feet
PO
RP
NOTE
« FOR NEGATIVE GROUNO,DISCONNECT JUM PER FROM TE R M IN A L S
3 ANO 6 ANO RECONNECT TO T E R M IN A LS 4 AND 3
Figure 3. Local Sensing Connection.
NOTE
I* FOR NEGATIVE GROUNO. OlSCONNECT JUMPER FROM TE R M IN A LS
3 ANO 6 ANO RECONNECT TO TE R M IN A LS « ANO S
Figure 4. Remote Sensing Connection.
275
(A ) LO CA L SENSING
(B ) REM OTE SENSING
NOTE
M FOR NEGATIVE GROUNO. DISCONNECT JU M P E R FROM
TE R M IN A LS 5 ANO 6 ANO RECONNECT TO TERM IN A LS
4 AND 3
Figure 5. Programmed Voltage, With External Resistor
r
r
©
“
®
+DC +S
®
©
PO
RP
1
|
®
®
1
1 103-132 VAC
4 7 - 4 4 0 H i -S
1
1
1
~
+ DC
6)
©
©
©
®
-O C
©
103-132 VAC
4 7 - 4 4 0 M« -S
+S
PO
®
® ®
RP
L j
*
LOAD PROGRAMMING
VOLTAGE
LOAD
(A) LOCAL SENSING
PROGRAMMING
VOLTAGE
(B) REMOTE SENSING
NOTE
« FOR NEGATIVE GROUNO. DISCONNECT JUMPER FROM
TERM INALS 5 ANO 6 ANO RECONNECT TO TE R M IN A L S
4 ANO 5
Figure 6 .
P ro gram m e d V oltage, W ith External P ro g ram m in g Voltage Source
276
I
r(fiUNIT
LOAD
(A ) LOCAL SENSING
(B ) REMOTE SENSING
NOTE
» MAKE ONLY ONE GROUND CONNECTION FOR THE SERIES COMBINATION. TO CHANGE GROUND AS
SHOWN, REMOVE JUMPER FROM TERMINALS 5 ANO 6 ON ( I ) UNIT AND CONNECT ANY ONE OF THE
OTHER JUMPERS AS SHOWN IN OOTTED LINE
------
Figure 7. Series Connection, Common Load. (LCS-CC-01 through LCS-CC-03 Only)
277
(A ) LOCAL SENSING
(B ) REMOTE SENSING
NOTE
# MAKE ONLY ONE GROUND CONNECTION FOR THE SERIES COMBINATION. TO CHANGE GROUNO AS
SHOWN. REMOVE JUMPER FROM TERMINALS 5 ANO 6 ON ( I ) UNIT AND CONNECT ANY ONE OF THE
OTHER JUMPERS AS SHOWN IN DOTTED LINE
-----t DIODES NOT REQUIRED FOR MODELS L C S -C C -O I THRU L C S - C C - 0 3 .
Figure 8. Series Connection, Dual Load.
278
NOTE
» FOR NEGATIVE GROUND, DISCONNECT JUMPER FROM
TERMINALS 5 ANO 6 ANO RECONNECT TO TERMINALS
4 AND 5
Figure 9. Parallel Connection, Local Sensing. (LCS-CC-01 through LCS-CC-03 Only)
NOTE
» FOR NEGATIVE GROUNO. DISCONNECT JUMPER FROM
TERMINALS 3 ANO 6 ANO RECONNECT TO TERMINALS
4 ANO 5
Figure 10 . Parallel Connection, Remote Sensing. (LCS-CC -01 through LCS-CC-03 Only)
279
II TH IS CIRCUIT ELEMENT IS LOCATED IN I C I .
LCS-CC-2, LCS-CC-3-0V, LCS-CC-6 ANO LCS-CC-01 ONLY.
POWER
S U PPLY
Figure 11. Typical Block Diagram.
NOTES
1 R E G U L A T IO N AN O R IP P L E C H E C K M E T E R S M U S T NO T B E
G R O U N D E D T H R O U G H T H R E E -W IR E L IN E C O RD TO G R O U N D
2
P E R F O R M C H E C K S W IT H L O C A L
S E N S IN G
C O N N E C T IO N S O N L Y
Figure 12. Test Connections For C onstant Voltage Performance Checks.
280
REAR VIEW
in p u t
ano
O u tp u t
t e r m in a ls
SIDE VIEW
,( 2 ) N O 6 - 5 2 TAPPED H O LES
FOR MOUNTING
CUSTOMERS CUTOUT (FAR SIDE)
h
FRONT VIEW
-(4 )NO. 8 -3 2 TAPPED HOLES (OPPOSITE SIDE)
FOR CUSTOMER CHASSIS MOUNTING
NAMEPLATE (MODEL NO. 8
RATINGS)
OUTPUT VOLTAGE ADJUST
281
\
CUSTOMERS CUTOUT
O V ER VO LTAG E P R O TE C TO R
(O PTIO N A L A C C E S S O R Y )
(NOT REQUIRED ON L C S -C C -5 -O V )
I CUSTOMER MOUNTING SCREWS MUST NOT
INTO POWER SUPPLY BY MORE THAN
PROTRUDE
3/8."
1 CUSTOMER MUST PROVIDE CUT-OUTS IN HIS
MOUNTING SURFACE TO CLEAR VENTILATION
PATTERNS ANO ALLOW FREE AIR CIRCULATION.
BOTTOM VIEW
Figure 13. Outline Drawing.
282
NOTCS
I. W M T O ft M IU C I A M m 0M M
I . M tt T O A «ATTMC I / 4 M T T , RESISTORS ASOVC I
■ a tts a m v m k w o u n o u n l c s s o t h c r w is e n o t c o
1 N M r o « TOLCRAMCCS COMP. 1*0%, WiftCWOUNO »5%
r i M *1% ; UNLCSS OTHERWISE MOTtO
A. CAMCITOR la iR A M C O C U C T M a jT IC -10% , *100% ,
V n M M O t .C tJ U M C 10%, UNLCSS OTHERWISE NOTCO.
I. r n « x i
•
W O tC A TIf CLOCK M M NOTATOM O f SHAFT.
M O K J r t l CONNECT** 10 CHASM
• N O tO ir il AOJUSTMCNT 0 * CALIBRATION CONTROL.
SCI INSTRUCTION MANUAL.
IA A » 0 A FT » F t L - 0 0 - 0 J 0 , USC M 4 0 0 t OlQOC FOR
ftCPlACIMCMT UNLESS OTHERWISE NOTCO.
♦
llO C J trC I TCRMMAL ON FftMTCD W *1 M SOARO.
S. M M tU T lO N IS LAMSOA M T N U U btR
T. M t t f l C U M tN T 10% POM 4 T -S 3 H « ,P O R S S - 4 4 0 H *
9
*
CONSULT FACTORY.
S CONOlTlONS P0ft C*CUrrPOffTMCASUMMCNTS< INPUT
IBVNC.SONt: MAX. RATED V0LTAGC NO LOAO. MOtCATCO
V0LTASCS A M TYPICAL VALUES ANO A M DC UNLESS
OTHERWISE NOTCO. OC MEASUREMENTS TAKEN WITH
< 0,0 0 0 OMtiS/V VOLTklCTER KTWCCN ♦ $<T E R M 7)»
MMCATCO POWTS UNLESS NOTCO, *S A H 0 «V SHORTCO,
- » a n o - v shorted
S. COAT SOTH SCCS OF MSULATMO WAFER WITH DOW
COAMNS N0.J40 S t. ICONE SM ASE.
•a ON MODELS WITH
O PTION. Tl HAS TAPPED
PRIMARY. V OPTION UNITS CAN BE WIRED FOR
IS 7 - 2 4 2 V INPUT (USINO TAP) OR FOR 2 0 S -2 S 5 V
INPUT (USINO ENTIRE PRIMARY).
II. ON UNITS WITH MV H O PTIO N , CIO 13 O .O IM F ±IO % ,
1000V, PAPER.
V
MOOCL
LCS-CC-01
FOR WIMNO OP POWER
SUPPUT TO LOAO
REFER TO POWER
S U P P U -TO -LO A O
WMNO DIAMAMS
THIS SCHEMATIC APPLIES TO UMTS
KA R IN O SCRlAL NQ PREFIX A.
A
LAMBDA
ELECTRONICS COMP
MELVS.LE, L .I., NEW YORK
OOTTEO CONNECTIONS
INOICATE JUMPERS IN
PLACE A M LOCAL
SENSING “ 2-W lR E
CONNECTION'*
RIO
J?JL
36M ±5%
8660
COMR 25V P'LM ll.IV
R9
IOK
283
NOTES
I. REStf TOR VALUES ARE M OHMS
M M T O K U f T t W I M M T T i RESISTORS ABOVE 2
WATTS ARC W1RIWOUNO UNLESS OTHERWISE NOTED
& ft(«S T O A TOLERANCES COMP. tiO % , WlREWOUND *2%
« . « >1%,UNLESS OTHERWISE NOTED
4 CAPACITOR TOLERANCES ELECTROLYTIC -10% , .1 0 0 % ;
I
MYLAR ttO t.C E A A M K
S . SYMBOLS
•
($
*
+t
1 0 % , UNLESS OTHERWISE NOTED.
INDICATES CLOCKWISE ROTATION O f SHAFT.
IN0K4TES CONNECTION TO CHASSIS
INDICATES ADJUSTMENT OM CALIBRATION CONTROL.
SEE INSTRUCTION MANUAL.
LAMBQAFT»F»L-00-OSO. USE * 4 0 0 2 D*00€ FOR
REPLACEMCNT UNLESS OTHERWISE NOTED
INOlCATIS TERMINAL ON PRMTEO WIRING SOARO.
«. DCSMNATKM IS LA M I0A R M T NUWKR
f OCR ATE CURRENT 10% f OR 4 7 - M H i, F 0 R B 3 - 4 4 0 H I
CONSULT FACTORY.
A CONDITIONS FOR CIRCUIT POWT MEASUREMENTS' INPUT'
IS V A C .tO M i: MAX.RATEOVOLTAOE NO LOAD. INOICATCO
VOLTAOES AAE TYPICAL VALUES ANO ARC DC UNLESS
OTHERWISE NOTED. DC MEASUREMENTS TAKEN WITH
2 0 ,0 0 0 OHMS/V VOLTMETER BETWEEN ♦ S C T E R M .T )*
MOtCATEO POINTS UNLESS NOTE0. »S ANO «V SHORTED
-S A N O - V SHORTED
9. COAT BOTH SIOCS OF MSULATM9 WAFER WITH DOW
CORMNO N 0 .3 4 0 SILICONE GREASE.
10. SEE TABLE Z FOR COMPONENT VALUES.
11. SEE TABLE Z FOR VOLTAOE VALUES.
12. R23 ONLY USEO ON MODEL LCS-CC-03.
13. ON UNITS WITH V OPTION, Tl HAS TAPPED
PRIMARY. *V OPTION UNITS CAN BE WIRED PON
I87-242V INPUT (USINO TAP) OR FOR 205-2B5V
INPUT (USIN0 ENTIRE PRIMARY).
I< ON UNITS WITH "V“ OPTION, Cl IS O.OIMPllO%,
__________
IOOOV, PAPER.
THIS SCHEMATIC APPLIES TO UMTS
BEARINO SERIAL NO. PREFW A
TOR WIRINO OF POWER
SUPPLYTO LOAD
REFER TO POWER
SUPPLY-TO-LOAD
WIRINO DIAGRAMS
DOTTED CONNECTIONS
INDICATE JUMPERS IN
PLACE FOR LOCAL
SENSMO 2 -WIRE
CONNECTION"
A
LAMBDA
ELECTRONICS CMP
MELVILLE, L.I., NEW YORK
TABLE I
SCHEMATIC DATA REFERENCES
MODELS LCS-CC-02 AND LCS-CC-03
Schematic Component!
Schematic
Voltage
Measure menU
284
C6
Cl 4
Ql
Q2
Q6-Q9
R3
R8
R17
R25-R28
R39
*FBN-
*FBN-
•FBN-
1W
COMP
2W
WW
1W
COMP
3W
WW
MW
Models
A
(Vdc)
B
(Vdc)
C
(Vdc)
D
(Vac)
-10+100%
ELECT
-10+100%
ELECT
LCS-CC-02
- 18
14.4
-18.6
23.7
22,000 mf
40 vdc
500 m f
60 vdc
L109
36485
36485
3.3K
±5%
23K
±5%
3.3K
±6%
0.5
±5%
100K
± 1%
FILM
LCS-CC-03
-32
22.0
-32.6
38.6
13,000 mf
60 vdc
200 mf
100 vdc
L115
35902
36220
10K
±.10%
40K
±.10%
10K
±.10%
0.91
±2 %
220K
±.10%
COMP
•Lambd* pan number
Rl
(NOTE 12)
T
NOTES
I. M M T M VALUES A M M O H M
I . R C tO T O R »A TTA i t 1/4 WATT; R E S IS T O R S A S O V E 2
■ A T T * A AC V M W O U N O U N L E S S O T H E R W IS E N O T E O
X M M T M T O L IA A N C E I COMP. tlO U jW lR E W O U H O * 2 %
*i«i
o th e r w is e n o te d
4 . C A W O T O R T0 K A A M C C 9 ELECTROLYTIC - 10% . ♦ I 0 0 % 1
tm .A H M O ^ . C t l U M K *0 % , U N LE S S OTHERWISE N O T E D .
I CONDITIONS ROM ORCUTPOKT MEASUREMENTS' INPUT.
iBNAC.SOHl. NOM.RATEO VOLTAGE NO LOAD. MMCATEO
VOLTAOES ARE TYPICAL VALUES AND ARE DC UNLESS
OTHERWISE NOTEO. DC MEASUREMENTS TAKEN WITH
2 0 ,0 0 0 OHUS/V VOLTMETER BETWEEN ♦ S (T£A M .7)0
MOCATEO POINTS UNLESS NOTEDt *S ANO *V SHORTED,
- 8 ANO-V SMORTEO
9. i T M O l l
t . COAT DOTH SCES OP MSULATVM WAFER WITH OOW
CORNING N0.540 SILICONS GREASE.
ntM
I
®
*
*
«.
7
mktis
M O * C A T ( t CLOCKW ISE ROTATION OF S H A F T .
I N C K A U I CONNECTION TO C H A S M
IN O iC A T tt A D JU S T M E N T OR C A L I S T A T IO N C O N T R O L .
S EE IN STRUCTION MANUAL.
LA M S O A F T lF S L - O O - O S O , U S E * 4 0 0 *O lO O E FOR
R E P L A C EM E N T U N L E S S O TH E R W IS E NOTEO.
INCMCATCI T E R M IN A L ON P R M T E O W lR lN fl SOARO.
DESIGNATION IS L A A M O A M R T NUMQCR
OE R ATE CURRENT 10 % FOR 4 ? - 9 3 H * . FOR S 5 - 4 4 0 H *
CONSULT FACTORY.
10. SEE TABLE I FOR COMPONENT VALUES
II SEE TABLE Z FOR VOLTACE VALUES.
12. ON UNITS WITH "V"OPTION, Tl HAS TAPPED PRIMARY.
V OPTION UNITS CAN BE WIREO FOR IB7-*4tV
INPUT (USINO TAP) OR FOR 209-2G9V INFUT
(USING ENTIRE PRIMARY).
13. ON UNITS WITH V OPTION, CIO IS O.OIMFtlO%,
IOOOV, PAPER.
MOOELS
LCS-CC-12
LCS-CC-24
LCS-CC-2B
LCS-CC-15
LCS-CC-4S
LCS-CC-20
FOR WtRMG OF POWER
SUPPLY TO LOAO
REFER TO POWER
SUPPLY-TO-LOAD
WIRING DIAGRAMS
LAMBDA
KLECTROMCS CONK
MCOflLLE, L.I., NEW YORK
DOTTED CONNECTIONS
INOICATE JUMPERS IN
PLACE FOR LOCAL
SENSINO " 8 - WIRE
CONNECTION
HJHOMK
TABLE I
SCHEMATIC DATA REFERENCES
MODELS LCSCC12 THRU LCS-CC-48
Schematic Component!
Schematic
Voltage
Measure menu
C6
C14
CR2-CR5
CR8
Ql
Q2
Q6-Q9
R3
R4
R8
R20
R21
R25-R28
*6%
2W
WW
V4 W
FILM
*1%
WW
FILM
*5%
WW
Model*
A
(Vdc)
B
(Vdc)
C
(Vac)
•10+100%
ELECT
•10+100%
ELECT
•FBL-00-
•FBL-00-
•FBN-
•FBN-
•FBN-
LCS-OC12
•12
14.5
18.7
22.000 mf
40 vdc
900 mf
35 vdc
083
030
L109
36485
36485
1.8K
.1.10%
1W
COMP
1.8 K
±10%
IW
COMP
13K
9.09K
*1%
50 K
0.22
5W
LCS-CC15
•15
15.5
21.5
22.000 mf
40 vdc
900 mf
35 vdc
083
030
L109
36485
36485
1.8K
*10%
1W
COMP
1.8K
*10%
IW
COMP
13K
9.09K
*1%
50K
0.22
5W
LCSCC20
20
20.0
28.0
13,000 mf
60 vdc
500 mf
60 vdc
054
030
L I 09
36220
36220
2K
*3%
3W
WW
4.7K
*10%
1W
COMP
15K
15K
*5%
66.5K
0.39
5W
LCSCC24
24
21.0
31.8
13.000 mf
GO vdc
500 mf
60 vdc
054
030
LI 09
36220
36220
2K
*3%
3W
WW
4.7K
*10%
IW
COMP
15K
20K
*1%
100K
0.39
5W
LCS-CC 28
•28
21.5
35.0
13.000 mf
60 vdc
500 mf
60 vdc
054
030
L109
36220
36220
2K
*3%
3W
WW
4.7K
*10%
IW
COMP
16K
20 K
*1%
121K
0.39
5W
LCSCC-48
•48
30 0
55 2
4.000 mf
100 vdc
200 mf
100 vdc
054
036
L115
35902
35902
5.6K
±3 %
3W
WW
9K
*3%
3W
WW
23K
40.2K
*1%
121K
0.5
3W
* Lam bda p u t num ber
RIO
Rl
R9
3 6 M *5 %
6660
I0K
COMP 25V FILM 11,1V FILM
(NOTE 13
to
oo
NOTES
I.
fttM T O ft VALUCt U K « OHM*
* (W T O « WATTMC 1/4 WATT, RCSlSTORS ABOVE t
•A T T * A M WWCWOUMO UNLESS O TM JAW lU NOTCO
1 M BHTOR TOL(AANCCS: COMP. 1*0% , WMCWOUNO * 5 %
r«.M *1% ; UNLCIS OTHCRWHC NOTCO
4. CAMS TOM TOLt«ANCOeLCCT»OLYTlC-10% , » l0 0 % ,
W Y L M tlO % ,a iU M C *0 % ,lM .e s > OTMCKWiSC MOTEO.
9. I r u t O L J
t
<
♦
INDICATES CLOCKWISE ROTATION OF SHAFT.
IM C X A TfS C O N N E C T** TO CHASSIS
$
IN0*CAT|| AOJUSTMCNT OR CALIBRATION CONTROL.
•
M
see
in s t r u c t io n m a n u a l .
LAMBDA FT IFSL-OO-OJO, USC * 4 0 0 * OWOC FOM
MPLACENCNT UMLCSI OTMCRWtSC NOTCO.
IHOC AT11 TtflMIMAL ON FRWTCD V M M BOARO.
«. M M M T lC M |J LAM G O A M R T N U M M R
T OCRATC CURRENT 10% FOR 4 ? - S 3 H « , F 0 *
CONSULT FAC TORT.
S J -4 4 0 H *
s.
c o n o it io n s f o r o r c u t p o h t m c a s u m m c n t S’ in p u t .
le V M C .S O H t, N O M .R A TIO VOLTAGE NO LOAO. INOICATCO
V OLTAMS A M TYPICAL VW.UCS ANO A M OC UNLCSS
O T x m n s e n o t c o . d c u c a s u m m c n t s t a k c n w it h
> 0 ,0 0 0 O N tfS /V VOLTUCTCN BCTWCCN ♦ S (T C R M T ) *
•O C A T tO POINTS UNLCSS NOTCO* ♦ $ ANO «V SHORT CO,
- * A N O -V SNORTED.
13. ON UNITS WITH V OPTION, CIO IS 0.0IMF1I0% ,
MOOELS
1000V, PAPER.
LCS-CC-2
14 SEE TABLE X FOR VOLTAGE VALUES.
LCS-CC-B-OV
lcs - cc - <
• COAT BOTHSIOES or INSULATING WAFER WITH DOW
CORNING NO 340 SILICONE CREASE.
10. ON UNITS WITH "v“ OPTION Tl HAS TAPPCO PRIMARY.
“ V * OPTION UNITS CAN BE WIRED FOR IS7-242V
INPUT (USING TAP) OR FOR SOB-ICSV INPUT
(USING CNTlRC PRIMARY).
11. CG.CR2S, R40 ANO SCRI ONLY USC0 ON MOOCL LCS-CC-B-OV.
12. ON MOOCL LCS-CC-2; R20 IB I.47K, R2I IS 64Kt2%
RS IB 2.2 K.
TABLE I
SCHEMATIC VOLTAGE VALUES
A
B
C
MOOEL
(VAC) (VDC) (VDC)
7.9
6.85
LCS-CC-2
-2
LCS-CC-S-OV 10.3
—6
t.G
LCS-CC-G
-G
10.3
B.S
FOR WIRMG OF POWER
SUPPLY TO LOAO
REFER TO POWER
SUPPLY-TO - LOAO
WIRING DIAGRAMS
THIS SCHEMATIC APPLIES TO UNITS
BEARING SERIAL NO PRCFW A
a
/A
LAMBDA
ELECTRONICS COM!
MCIWLLC, L.I., NCW YORK
OOTTEO CONNECTIONS
INDICATE JUMPERS IN
PLACE FOR LOCAL
SENSIHO “2 -WIRE
CONNECTION
INSTRUCTION MANUAL
FOR
REGULATED POWER SUPPLIES
MODEL
LXD-3-152
This manual applies to units
bearing serial no. prefixes A&B.
This manual provides instructions intended for the operation of
Lambda power supplies, and is not to be reproduced without the
written consent of Lambda Electronics Corp. All information con­
tained herin applies to the LXD model unless otherwise specified.
LAMBDA ELECTRONICS CORP.
MELVILLE, L.I., N.Y.
MAIN PLANT TELEPHONE:
IM-LXD
288
516 M Y r t l e 4- 4200
TABLE OF CONTENTS
Section
Page
SPECIFICATIONS AND FEATURES
1
THEORY OF OPERATION
3
OPERATING INSTRUCTIONS
4
Basic Mode of Operation
4
Connections for Operation
4
Supply Load Connections
4
Fuse Shutdown
5
MAINTENANCE
6
General
6
Trouble Analysis
6
Checking Transistors and Capacitors
6
Printed Circuit Board Maintenance Techniques
7
Trouble Chart
7
PERFORMANCE CHECKS
9
SERVICE
10
PARTS ORDERING
10
11
IM-LXD
28 9
SPECIFICATIONS AND FEATURES
D.C. OUTPUT -- ±12 VDC to ±15 VDC regulated for line and load.
current rating at ambient temperature.
TABLE
See table I for
I
AMBIENT
TEMPERATURE
40°C
50°C
60®C
71°C
MAX. CURRENT
(MA)
400
370
330
300
REGULATED VOLTAGE OUTPUT
(each side)
Regulation.................. 0.1% line or load with input variations from
105-132 or 132-105 volts AC and load vari­
ations from no load to full load or full
load to no load.
R i p p l e ...................... 1.5 millivolts rms; 5 millivolts peak to
peak.
Temperature Coefficient .......
Output change in voltage 0.03%/°C.
A.C. INPUT -- 105-132 VAC at 47-440 Hz. Input power: 34 Watts*. Delete 40° C
rating for 47-57 Hz input. For 63-440 Hz input, consult factory.
* With output loaded to full current rating and input voltage
132 volts AC, 60 Hz.
Absolute voltage difference between negative and positive outputs
within 2 %.
OVERLOAD PROTECTION
TRACKING--
Electrical
External .................. Automatic electronic current limiting cir­
cuit limits output current to a preset lim­
it value for protection of load and power
supply when external overloads and direct
shorts occur.
INPUT AND OUTPUT CONNECTIONS --- Terminal block on rear of chassis.
IM-LXD
1
290
OPERATING AMBIENT TEMPERATURE RANGE AND DUTY CYCLE --- Continuous duty from
0°C to 71°C ambient.
STORAGE TEMPERATURE --(non-operating)
V D C ADJ
CONTROL —
-55°C to 85°C
Voltage adjust control permits adjustment of DC output.
PHYSICAL DATA
S i z e ........................3-3/16" x 3-5/16" x 5"
Weight...................... 3 lbs. net; 3-1/4 lbs. shipping wt.
Finish...................... Gray, FED. STD. 595 No. 26081
MOUNTING--- Three surfaces, each with tapped mounting holes can be utilized
for mounting this unit. The LXD-3-152 power supply can be mounted with
Top, Bottom, or Front facing up. Top, Bottom or Front must be in a hor­
izontal plane. Refer to figure 7 for mounting details.
SUFFIX "R" --- LXD-3-152 power supplies with suffix "R" are fungus inert.
"V" OPTION --- The LXD-3-152 power supply can be obtained for 205-265 VAC,
47-440 Hz input or 187-242 VAC, 47-440 Hz input. See nameplate for AC
input rating. See Schematic Diagram for rewiring of AC input. At
47-57 Hz delete 40°C rating.
ACCESSORIES
Rack Adapter ................
Rack adapters LRA-8 , LRA-10, LRA-11, LRA-12,
and LRA-13 with or without chassis slides
are available.
Overvoltage Protector......... Externally mounted, Overvoltage Protector
LC-OV-11 is available for use with the
LXD-3-152 power supply.
Metered and Non-Metered....... Metered panels MP-3, MP-5 and Non-Metered
Panels
panels P-3, P-5 are available for use with
Lambda rack adapters LRA-4, LRA-6 or LRA-7.
2
IM-LXD
291
THEORY OF OPERATION
GENERAL
The text in this section refers to components associated with the plus (+)
side of the power supply; however, the discussion is equally applicable to the
minus (-) side which has similar components, except for potentiometer R6 , which is
only used on the (+) side.
The Lambda LXD-3-152 power supply consists of an AC input circuit and transfor­
mer; a preregulator*; a main regulator circuit consisting of a rectifier and filter,
a series regulator, emitter follower driver, a current comparator*, a voltage com­
parator*, an amplifier*, current and voltage sensing networks and a voltage refer­
ence circuit*.
* This circuit element is part of integrated circuit (ICl) in the
supply.
The circuit arrangement is shown in block diagram form, figure 5. The cir­
cuitry is discussed with reference to the block diagram and the schematic diagram.
FUNCTIONAL DESCRIPTION
Single phase input power is applied to transformer T1 through the input cir­
cuit.
The main rectifier, a full wave bridge rectifier, provides the power which is
filtered by capacitor Cl and then regulated via a series regulator and delivered
to the output. The main rectifier also provides power for the preregulator located
in ICl. The reference element, powered by the preregulator, provides a reference
voltage for the voltage comparator.
Constant voltage circuit operation is determined by changes in the load which
cause a change in one input to the voltage comparator through voltage dividers R4,
R6 and R8 . A second input to the comparator is a reference voltage that is devel­
oped by the preregulator in ICl. The comparator compares the output voltage change
with the reference voltage resulting in an error signal at the output of the com­
parator.
In constant voltage operation, the voltage across Rl is less than the base-toemitter voltage of the amplifier in ICl, causing the current comparator to be at
cut off.
If the load current decreases, causing a rise in output voltage, the volt­
age comparator conducts more and less current flows into the base of series regula­
tor Ql. This action causes the series regulator impedance to increase and the out­
put voltage to decrease accordingly.
Current limit circuit operation is determined by changes in the load. The cur­
rent comparator samples load current through current sensing resistor Rl. When
the voltage drop across Rl increases to the preset reference determined by the
base-to-emitter voltage of the amplifier, the current comparator conducts.
Thus,
when the output current rating of the unit is exceeded, the current comparator con­
ducts, decreasing the current into the base of series regulator Ql, resulting in
an increase of voltage across the series regulator and a decrease of output voltage,
IM-LXD
o
292
effectively limiting the output current to a safe value. The current limit value
is determined by fixed resistor R1 and the base-to-emitter voltage of the amplifier.
OPERATING INSTRUCTIONS
BASIC MODE OF OPERATION
This power supply operates as a constant voltage source provided the load cur
rent does not exceed the rated value at 40°C. For continuous operation, load cur­
rent must not exceed the rating for each ambient temperature.
CONNECTIONS FOR OPERATION
NOTE:
Make all connections to the unit before applying AC
input power.
Ground Connections.
The Lambda power supply can be operated either with negative,
positive or common terminal grounded. Use insulated wire whenever positive or neg­
ative output terminals are connected to terminal 3.
Connection Terminals.
Make all connections to the supply at the terminal block
on the rear of the supply. Apply input power to terminals 1 and 2; always connect
the ungrounded (hot) lead to terminal 1 .
The supply positive terminal is brought out to terminal 7. The supply negative
terminal is brought out to terminal 5. Recommended wiring of the power supply to
the load and selection of wiring is shown in figures 1 through 4. Selection of
proper wiring is made on the basis of load requirements. Make all performance
checks and measurements of current or voltage at the rear output terminals. Con­
nect measuring devices directly to terminals or use the shortest leads possible.
SUPPLY LOAD CONNECTIONS
Connections For Operation as a Constant Voltage Source
The output impedance and regulation of the power supply at the load may change
4
IM-LXD
293
when using
cal length
teristics,
with local
the supply as a constant voltage source and connecting leads of practi­
are used. To minimize the effect of the output leads on these charac­
remote sensing is used. Recommended types of supply-load connections
or remote sensing are described in the following paragraphs.
Refer to figure 1 to determine voltage drop for particular cable length, wire
size and current conditions. Lead lengths must be measured from supply terminals
to load terminals as shown in figure 2 .
Local Sensing Connection, Figure 3*. The two-wire connection, with local sensing
is the connection suitable for applications with relatively constant load. Any
load connection combination, as shown in the figure, can be used.
Remote Sensing Connection, Figure 4*. Remote sensing provides complete compensation
for the DC voltage drops in the connecting cables. Sensing leads should be a twis­
ted pair to minimize AC pick-up. A 2.5 mf, elect., capacitor may be required
between output terminals and sense terminals to reduce noise pick-up.
*At no time can the current leaving the +V terminal or entering the -V terminal,
exceed the rated current for the given ambient temperature. Refer to
SPECIFICATIONS AND FEATURES for current ratings.
FUSE SHUTDOWN
Fuses will blow when the maximum rated current value for the fuse is exceeded.
Fatigue failure of fuses can occur when mechanical vibrations from the installation
combine with thermally induced stresses to weaken the fuse metal. Many fuse fail­
ures are caused by a temporary condition and replacing the blown fuse will make
the fuse protected circuit operative. When the LXD supply is used with the over­
voltage protector option, fuses FI and F2 will provide load protection against
internal component failure.
IM-LXD
5
294
MAINTENANCE
GENERAL
This section describes trouble analysis routine, replacement procedures, cal­
ibration and test procedures that are useful for servicing the Lambda LXD-3-152
power supply. A trouble chart is provided as an aid for the troubleshooter. Refer
to the section on specifications and features for the minimum performance standards.
TROUBLE ANALYSIS
Whenever trouble occurs, systematically check fuse, primary power lines, ex­
ternal circuit elements, and external wiring for malfunction before trouble shoot­
ing the equipment. Failures and malfunctions often can be traced to simple causes
such as improper jumper and supply-load connections or fuse failure due to metal
fatigue.
Use the electrical schematic diagram and block diagram, figure 5, as an aid
to locating trouble causes. The schematic diagram contains various circuit voltages
that are averages for normal operation. Measure these voltages using the conditions
for measurement specified on the schematic diagram. Use measuring probes careful­
ly to avoid causing short circuits and damaging circuit components.
CHECKING TRANSISTORS AND CAPACITORS
Check transistors with an instrument that has a highly limited current capabil­
ity. Observe proper polarity to avoid error in measurement. The forward transis­
tor resistance is low but never zero; backward resistance is always higher than the
forward resistance.
For good transistors, the forward resistance for any junction is always great­
er than zero.
Do not assume trouble is eliminated when only one part is replaced. This is
especially true when one transistor fails, causing other transistors to fail. Re­
placing only one transistor and turning power on, before checking for additional
defective components could damage the replaced component.
When soldering semi-conductor devices, wherever possible, hold the lead being
soldered with a pair of pliers placed between the component and the solder joint
to provide an effective heat sink.
N0TE:
The leakage resistance obtained from a simple resistance
check of a capacitor is not always an indication of a faulty cap­
acitor. In all cases the capacitors are shunted with resistances,
some of which have low values. Only a dead short is a true in­
dication of a shorted capacitor.
IM-LXD
295
PRINTED CIRCUIT BOARD MAINTENANCE TECHNIQUES
1.
If foil is intact but not covered with solder it is a good contact.
not attempt to cover with solder.
Do
2.
Voltage measurements can be made from either side of the board. Use a
needlepoint probe to penetrate to the wiring whenever a protective coating is
used on the wiring. A brass probe can be soldered to an alligator clip adapt­
ed to the measuring instrument.
3.
Wherever possible use a heat sink when soldering transistors.
4.
Broken or damaged printed wiring is usually the result of an imperfection,
strain or careless soldering. To repair small breaks, tin a short piece of
hook-up wire to bridge the break, and holding the wire in place, flow solder
along the length of wire so that it becomes part of the circuitry.
5.
When unsoldering components from the board never pry or force loose the
part; unsolder the component by using the wicking process described below:
(a)
Select a 3/16 inch tinned copper braid for use as a wick; if braid
is not available, select AWG No. 14 or No. 16 stranded wire with 1/2
inch insulation removed.
(b)
Dip the wick in liquid rosin flux.
(c)
Place the wick onto the soldered connection and apply soldering
iron onto the wick.
(d)
When sufficient amount of solder flows onto the wick, freeing the
component, simultaneously remove iron and wick.
TROUBLE CHART
The trouble chart is intended as a guide for locating trouble causes, and is
used along with the schematic diagram.
The operating conditions assumed for the trouble chart are as follows:
(a)
AC power of proper voltage and frequency is preset at input ter­
minals .
(b)
Either positive, negative or common terminal is connected to
chassis ground.
(c)
The power supply is connected for constant voltage with local
sensing. See schematic; dotted lines indicate jumpers connected for
local sensing operation.
IM-LXD
7
296
TROUBLE SHOOTING CHART
Symptom
Zero volts DC output,
both sides.
Probable Cause
Remedy
Short circuit across out­
put of supply.
Check load and load con­
nections, correct as
necessary.
FI, Ql or Rl open.
Check FI, Ql and Rl for
open, replace as neces­
sary.
Shorted CR9 or C2.
Check CR9 and C2 for
short, replace as nec­
essary.
ICl defective.
Check pin 6 of ICl (see
schematic diagram) for
indicated voltage. If
indicated voltage is not
present, replace ICl.
FI, Q2 or R9 open.
Check F2, Q2, and R9
for open, replace as nec­
essary.
Short circuit across out­
put of supply.
Check load and load con­
nections, correct as
necessary.
Shorted CR10 or C4.
Check CR10 and C4 for
short, replace as nec­
essary.
IC2 defective.
Check pin 6 of IC2 (see
schematic diagram) for
indicated voltage. If
indicated voltage is not
present, replace IC2.
Unable to adjust out­
put voltage.
Damaged VDC ADJ. con­
trol.
Check R6 for short and/
or open, replace as nec­
essary.
High ripple at twice
line frequency and un­
regulated DC output,
both sides.
Ql shorted.
Check Ql for short, re­
place as necessary.
Jumper between terminals
7 and 8 open.
Refer to figures 3 and
4 for proper supply ter­
minal connections.
Zero volts DC output,
minus side.
TROUBLE SHOOTING CHART (cont'd)
Symptom
5.
6.
7.
8.
High ripple at twice
line frequency and
unregulated DC output,
minus side.
High ripple at line
frequency, both sides.
High ripple at line
frequency, minus side.
High ripple at fre­
quency other than
line or twice line
frequency.
Probable Cause
Remedy
Q2 shorted.
Check Q2 for short, re­
place as necessary.
Jumper between terminals
4 and 5 open.
Refer to figures 3 and
4 for proper supply ter­
minal connections.
Defective main rectifier,
plus side.
Check for open and/or
short CR1 thru CR4.
Cl open.
Check Cl for open, re­
place as necessary.
Defective main rectifier,
minus side
Check for open and/or
short CR5 — CR8 .
C3 open.
Check C3 for open, re­
place as necessary.
Oscillation due to defec­
tive component in filter
network.
Check for open C5, C6 ,
C2 and C4.
PERFORMANCE CHECKS
Check the ripple and regulation of the power supply using the test connection
diagram shown in figure 6 . Use suggested test equipment or equivalent to obtain
accurate results. Refer to SPECIFICATIONS AND FEATURES for minimum performance
standards.
Set the differential meter, DC VTVM (John Fluke Model 801H or equivalent) to
the selected power supply operating voltage. Check the power supply load regula­
tion accuracy while switching from the load to no-load condition. Long load leads
should be a twisted pair to minimize AC pick-up.
Use a Variac to vary the line voltage from 105-132 or 132-105 volts AC and
check the power-supply line regulation accuracy on the VTVM differential meter.
Use a VTVM, Ballantine 320 or equivalent, to measure rms ripple voltage of
the power supply DC output. Use oscilloscope to measure peak-to-peak ripple volt­
age of the power supply DC output.
Perform checks on both p lu s and minus s id e s o f the power s u p p ly .
IM-LXD
298
SERVICE
When additional instructions are required or repair service is desired, con­
tact the nearest office of the Lambda Electronics Corp. where trained personnel and
complete facilities are ready to assist you.
Please include the power supply model and serial number together with complete
details of the problem. On receipt of this information, Lambda will supply service
data or advise shipping for factory repair service.
All repairs not covered by the warranty will be billed at cost and an estimate
forwarded for approval before work is started.
PARTS ORDERING
Standard components and special components used in the Lambda power supply can
be obtained from the factory. In case of emergency, critical spare parts are avail­
able through any Lambda office.
The following information must be included when ordering parts:
1.
Model number and serial number of power supply and purchase date.
2.
Lambda part number.
3.
Description of part together with circuit designation.
4.
If part is not an electronic part, or is not listed, provide a description,
function and location of the part.
10
IM-LXD
299
PARTS LIST
The electrical parts located on Lambda model LXD-3-152 are listed
here. In addition, there are separate listings of parts for the “ V”
option and MP*3, MP-5, P-3, and P-5 accessories
M ODEL LXD-3-152
PARTS FOR “ V " OPTION
CIRC.
DESIG.
Cl
C2
C3
C4
C5,
C6
C7
C8
DESCRIPTION
Cap., elect., 400 m f
-10 +100%, 40 vdc
Cap., elect., 50 mf,
-10 +75%, 50 vdc
Same as C l
Same as C2
Cap., mylar, 0.01 mf,
±10%, 400 vdc
Cap., mylar, 0.033 mf
±10%, 400 vdc
Cap., tant., 1 m f
±20%, 35 vdc
Rectifier
LAMBDA
NO.
CBR-4 0-085
UNIT
PRICE
$
.51
CGL-10-002
.36
C7
CGL-33-009
.50
T l*
CBN-10-009
1.33
FBL-00-030
1.40
FBM-Z104
Integrated circuit
FBT-00-016
3.00
Q l,
Transistor, NPN
FBN-36485
4.13
DLM-91-006
1.32
R2
R3
R4
R5
R6
R7
R8
R9
R10
Rl 1
Rl 2
R13
Rl 4
III 5
R16,
R17
R18
R19
Tl
DCB-4711
Cl
DRS-20-012
1.83
Q2
Rl
R2
R3
.15
R4
R5,
R6
R7
DCS-25-089
$ .50
ABA-LXD-3-152G 16.02
PARTS FO R OVER VOLTAGE ACCESSORY
MODEL LCOV-11
.10
.15
DCS-89-090
CGL-10-010
.75
DCR-68-073
DCS-32-082
Cap., mylar, 0.01 m f
±.10%, 600 vdc
Transformer
* On units with serial no. prefix A, T l is
ABA-LXD-3-152 V.
Ql
DCS-12-085
UNIT
PRICE
On model LXD-3-152 with suffix “ V”
capacitor C7 and transformer T1 change.
Part no. changes for C7 and T1 are listed
here.
CBP-50-058
Rectifier, zener diode
Same as C R l
Res., w.w., 0.91 ohm
±5%, 2w
Res., comp., 470 ohms
±10%, */« w
Not assigned
Res., film, 680 ohms
±2%, */« w .
Not assigned
Res., variable, cermet,
2,000 ohms, ±10%,
1w
Not assigned
Res., film, 1,200 ohms
±5%, lA w
Same as R l
Same as R2
Not assigned
Res., film, 3,160 ohms
±0.5%, Vi w
Not assigned
Res., film, 8,870 ohms
±0.5%, '/« w
Not assigned
Res., film, 2,550 ohms
±0.5%, Vi w
Same as R8.
Same as R2.
Transformer
LAMBDA
NO.
DESCRIPTION
3.50
CR1
thru
CR10
C R ll
CR12,
CR13
IC l,
IC2
Q2
Rl
CIRC.
DESIG.
.33
.33
.33
R8
R9
R10
SCR1
Cap., mylar, 0.01 mf
±20%, 80 vdc
Transistor, NPN
Transistor, PNP
Res., var., w w, 20,000 ohms
±10%, 1 w
Res., film, 560 ohms
± 2% V* w
Res., film, 200 ohms,
+_5%, Vi w
Res., thermistor, 425 ohms
±.5%, IV* w
—Res., comp., 1,200 ohms
±10%, V* w
Res., comp., 33 ohms±5%,
'A w
Res., comp., 15,000 ohms,
±10%, Vi w
Res., comp., 27 ohms.
±10%, % w
Same as R5
Rectifier, silicon controlled
CGL-10-008
.50
FBN-L102
FBN-L114
DNT-20-010
2.40
3.50
2.85
DCR-56-035
.30
DCR-20-036
.30
DKR-4 3-004
1.35
DCB-1221
.10
DCB-3305
.15
DCB-1531
.12
DCB-2701
.10
FBP-00-014
3.00
ABA-LXD3-152 16.02
LXD-1
300
PARTS F O R M ETERED AND
PARTS F O R METERED AND
NON-METERED PANEL ACCESSORIES
MODELS MP-3, MP-5, P-3, P-5
CIRC.
DESIG.
C l,
C2
DS1
FI
M l*
M2*
S I* *
s it
XF1
DESCRIPTION
Cap., tant., 2.5 m f
-15+75%, 100 vdc
Pilot light assembly
Fuse, 1A,3AG,
SLO-BLO
Voltmeter, 0-40 vdc
Ammeter, 0-1 adc
Switch, SPST
Switch, SPST
Fuseholder
LAM BDA
NO.
CBN-25-010
NON-METERED PANEL ACCESSORIES
WITH “ V " OPTION
UNIT
PRICE
$
CIRC.
DESIG.
1.80
HRD-00-007
FFC-01-000
.83
.75
EBP-40-013
EDN-10-014
FDA-11-001
FDA-11-040
HRK-00-007
16.45
12.00
.94
2.22
1.60
DESCRIPTION
LAMBDA
NO.
UNIT
PRICE
On all metered and nonmetered panels with suffix
“ V” , Fuse F I changes and
a resistor is added in ser­
ies with pilot light DS1.
Part nos. for F I and DS1
•Res. are listed here
♦This part only used on MP-3, MP-5.
**This part only used on MP-3, P-3.
fThis part only used on MP-5, P-5.
LXD-2
301
FI
Fuse, 0.5A, 3AG,
SLO-BLO
FFC-00-500
DSl-Res.
Res., comp., 120,000 ohms,, DEB-1241
+10%, xh w
$1.05
.12
Figure 1. Cable Connection Chart
«--------------- “A"
♦ DC*-----------------POWER
SUPPLY
LOAD
«•
-DC -------------------
Figure 2. Cable Length "A" in Feet
LOAO(S)
*
LO A O (S )
LO AO (S) CAN BE CONNECTED
IN ANT C O N FIG URATION
*
IN A N Y
H»
Figure 3.
LOAO(S) CAN BE CONNECTEO
Local Sensing Connection
CONFIGURATION
A 2 . 5 M F , E L E C T . , CAP. M A Y SC R C O U I R C O .
Figure 4. Remote Sensing Connection
302
PREREGULATOR]
ft
VOLTAGE
SENSING
NETWORK
R4,R6,R8
INPUT
MAIN
I
RECTIFIER
AND FILTER H
Tl
SERIES S
REGULATOR
01
9
CURRENT
SENSING
Rl
O.C. OUTPUT
n o t e : t h is
DIAGRAM APPLIES TO ( + ) SIDE op po w er s u p p l y b u t can be
USED FOR ( - ) SIDE 8Y SUBSTITUTING THE CORRESPONDING
COMPONENT CIRCUIT DESIGNATIONS.
« THIS CIRCUIT ELEMENT IS LOCATED IN IC I .
Figure
note
5.
Block Diagram
:
THIS CONFIGURATION A P P LIE S TO PERFORMANCE CHECKS
P O S ITIV E OUTPUT S ID E . CONNECT O SC ILLO SC O P E,
RIPPLE M ETER, ANO D IF F E R E N TIA L METER TO NE G A TIV E
OUTPUT FOR CHECKS P E R FO R M ED ON THIS SIDE .
FOR
Figure 6. Test C onnections For Performance Checks.
303
OJ
>03
_____ >0)o
0888088880
O
0000000000
0000000000
0000000000
8888888888
OOOOQOOOOO
8888888888
0000000000
0000000000
OOOOOOOOOO
8883883388
0000000000
88d°
°383
000
000
o
o
0000000000
88o8°°8888
000
000
000
o
n
000
o
^ 71
^
B O TTO M V IE W
—
j
RIG HT S I O E V IE W
x c N o ret
L E F T S IO E V IE W
a O T tti
m om
m* m
( o V « a t •-» *
n o u s ro« u t c . A t
T4»»co
CUItOMC* MOUNTIN*
i
cuitomcm
h o lc*
muit mtoviot clcahancc
c u t o u t ! ro * COMFOMCNTS IHOVM
>0* ftU$H tfOUMtWS PN T h u tUMFACC.
1 c u s t o m e r m u s t m o v io c c u t - o u t in
Hi t M T * tuRFACC TO CLCAM VENTILATION
M T T C ItN S
U l S - S t TAPPED H O LM
FOR MOUNTUM o r
O.V.PROTCCTOIt
« eurtO M c»« m o u m t m ic n c w t m u t t no t
f n o t * uoc w t o p o w u i w n r r r u o m
THAN 1/4.
• R E A R V IE W
Figure 7.
Outline Drawing
TBL
NOTES’1. RESISTORS ARE COMR I/4W WITH VALUES IN OHMS,
UNLESS OTHERWISE NOTED.
Ql
F8N-36485
(NOTE 9)
2. RESISTOR TOLERANCES: COMP. ♦ 10%, FILM ♦ 1%,
WIREWOUNO 15%, UNLESS OTHERWISE NOTED.
3. CAPACITOR VALUES ARE IN MICROFARADS.
4. CAPACITOR TOLERANCES: MYLAR 110%, ELECTRO­
LYTIC - 10 +100%.
5. DESIGNATIONS ARE LAMBDA PART NUMBERS.
6. SYMBOLS:
f INDICATES CLOCKWISE ROTATION OF SHAFT.
INDICATES CONNECTION TO CHASSIS.
-►j-LAMBDA PART NO. F B L -0 0 -0 3 0 ; USE IN4002
DIODE FOR REPLACEMENT UNLESS OTHERWISE
NOTED.
-O* INDICATES TERMINAL ON PRINTED CIRCUIT BOARD
COM
□ IN D IC A T E S ACTUAL UNIT MARKING.
305
7. CONDITIONS FOR CIRCUIT POINT MEASUREMENTS:
INPUT : 115 VAC, 6 0 H i. MAX. RATED VOLTAGE NO LOAD
INDICATED VOLTAGES ARE TYPICAL VALUES
AND ARE D.C. UNLESS OTHERWISE NOTED, DC.
MEASUREMENTS TAKEN WITH 20 ,000 OHMS/V
VOLTMETER BETWEEN COM. (TERM 6 ) AND INDICAT­
ED POINTS UNLESS OTHERWISE NOTED.
8. DELETE 40°C RATING FOR 47-57HZ INPUT,FOR
6 3 - 4 4 0 Hr INPUT CONSULT FACTORY.
9. COAT BOTH SIDES OF INSULATING WAFER WITH
OOW CORNING NO. 340 SILICONE GREASE.
10. C7 IS 0.01 MF 6 0 0 V ON UNITS WITH V'OPTION.
11. ON UNITS WITH"V"OPTION,Tl HAS TAPPED
PRIM.VOPTION UNITS CAN BE WIRED FOR
I07-242V INPUT (USING TAP). OR
FOR 205-265V INPUT (USING ENTIRE PRIMARY). ON
SERIAL NO. PREFIX A , V OPTION UNITS; Tl
PRIMARY IS NOT TAPPED. AC INPUT IS 205-265V.
FOR WIRING OF POWER SUPPLY TO LOAD REFER
TO SUPPY-TO-LOAO WIRING DIAGRAMS.
DOTTED CONNECTIONS SHOWN ON TBI INDICATE
JUMPERS IN PLACE FOR LOCAL SENSING CONNECTION.
THIS SCHEMATIC APPLIES TO UNITS
BEARING SERIAL NO. PREFIXES A a B
SCHEMATIC DIAGRAM
R E G U LA TE D POWER SUPPLY
105132
VAC
4 7 -4 4 0 Hz
(NOTE II)
a
LXD-3-152
l a m b d a b k e -55, CORP.
YORK
A (^ e e C
O ) SU BSIDIARY