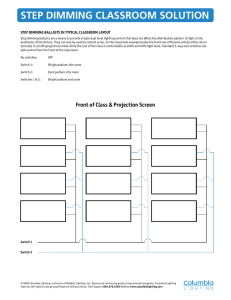
Lighting Control KNX Association KNX ADVANCED COURSE Table of Contents 1 2 3 4 General ..................................................................................................................... 4 Conventional Brightness Control: Sun shines – Light switches off............................. 4 Principle .................................................................................................................... 5 Constant Lighting Control .......................................................................................... 5 4.1 4.2 4.3 4.4 Constant Lighting Control: Areas of Application, Objective ................................ 6 Types of Closed-loop Control ............................................................................ 6 Usable Bus Devices .......................................................................................... 7 Characteristics of Sensors and Actuators .......................................................... 7 4.4.1 4.4.2 4.4.3 4.5 4.6 Parameterisation Notes, Flags, Possible Errors, Bus Load etc. ........................10 Parameterisation Example................................................................................12 4.6.1 4.6.2 4.6.3 4.6.4 4.6.5 4.6.6 4.7 Alignment of the Measuring Sensor ..............................................................16 Several Light Strips with a Varying Proportion of External Light: ...................16 Fundamental Mismatch ................................................................................17 Brightness Control....................................................................................................18 5.1 5.2 Areas of Application, Objective .........................................................................18 Types of Open-loop Lighting Control ................................................................18 5.2.1 5.2.2 5.3 5.4 5.5 5.6 Continuous Control .......................................................................................18 Two-step Control ..........................................................................................19 Usable Bus Devices .........................................................................................20 5.3.1 5.3.2 5.3.3 5.3.4 6 Functions ......................................................................................................12 Example .......................................................................................................13 Parameters ...................................................................................................13 Group Addresses..........................................................................................15 Linking of Sensor and Actuator Objects, Operation ......................................15 Additional Notes ...........................................................................................16 Installation Notes ..............................................................................................16 4.7.1 4.7.2 4.7.3 5 Sensors ......................................................................................................... 7 Closed-loop Controller types.......................................................................... 8 Actuators ....................................................................................................... 9 General ........................................................................................................20 Sensors ........................................................................................................20 Actuators ......................................................................................................20 Controllers ....................................................................................................20 Parameterisation Notes, Flags, Bus Load etc. ..................................................21 Parameterisation Example................................................................................22 Installation Notes ..............................................................................................25 Brightness Control, combined with Master/Slave Control .........................................25 6.1 6.2 Objective ..........................................................................................................25 Principle ...........................................................................................................25 Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 2/34 KNX ADVANCED COURSE 6.3 6.4 6.5 7 Available Devices .............................................................................................26 Parameterisation Example................................................................................26 Installation and Solution Notes .........................................................................27 Appendix Tasks .......................................................................................................29 7.1 7.2 7.3 Task 1: Lighting – Control dependent on External Light ....................................29 Task 2: Lighting – Closed Loop Control Master-Slave with separate Actuator ..33 General hints for the calibration of lighting closed loop control .........................34 Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 3/34 KNX ADVANCED COURSE 1 General The lighting in modern buildings is generally no longer switched manually. The users in principle demand the implementation of intelligent open- and closed-loop lighting control systems. This should result in the efficient operation of the lighting. Efficiency has three meanings in this context: firstly, there should be an obvious saving of energy; secondly, intelligent lighting systems should largely prevent lights from being switched on unnecessarily which should lead finally to an automatic protection of resources! 2 Conventional Brightness Control: Sun shines – Light switches off If dimmed fluorescent lamps are used for example instead of switched lamps, the service life of the fluorescent material is lengthened considerably even when the maximum power is reduced by only 10%. This again results in cost savings and protection of the environment. A well-designed lighting control system also means a more pleasant working environment for the user e.g. from office workstations. It is also worth mentioning in this context that closed-loop lighting control should – where possible – use existing (free) external light which results in a two-fold energy saving, particularly during the warmer seasons of the year. A reduced level of artificial light means less electrical power, less waste heat and thus also a lower cooling capacity if the rooms are air-conditioned. Moreover, scientific studies have proven, that an integrated blinds and illumination automation will reduce the sun induced heat energy into a building up to 80%, Thus even a 4-fold saving can be made, perhaps in certain buildings avoid to install air condition at all. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 4/34 KNX ADVANCED COURSE Light strip 1 Light strip 2 ~ 26 % Light strip 3 ~ 48 % Receiver ~ 70 % Receiver Receiver 500 lux required light intensity Necessary artificial light Existing daylight Goal: Brightness control optimised for all areas of the room 3 Principle Closed-loop and open-loop lighting control systems are based on the modulation of the lighting level inside the room by the measurement of either the level of external light (independent variable) or the measurement and feedback of the level of internal light (dependent variable) which contains a variable proportion of external light. In both variants, the primary goal is to maintain a required level of internal light as constant as possible. In general, it is a feature of a distributed system such as KNX that the individual tasks in the closed-loop or open-loop control systems are distributed among different devices: sensors, actuators and controller modules. This has both benefits and disadvantages as outlined below in detail. 4 Constant Lighting Control A closed-loop control circuit is used for constant lighting control. The required level of brightness in the room or the level of lighting at the desk is measured as a controlled variable together with the interference from the external light and then fed back to the actuators in the appropriate manner. Controller W Z Controlled system Controlling system Y Actuator Contr. variable X + X+Z Measuring device Brightness sensor W ... Reference variable (e.g. brightness, setpoint) Y ... Control value (dimming value 1-100%) Z ... Interference (level of external light) X ... Actual value (lux value at workstation) Figure 1: Constant lighting control Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 5/34 KNX ADVANCED COURSE 4.1 Constant Lighting Control: Areas of Application, Objective This type of control system is mainly used in commercial installations where it is important to adhere to certain regulations such as those governing the workplace but not to make more light available than necessary. The aim is to create optimum working conditions while at the same time saving costs. The user should also be offered an optimum level of convenience and the internal room controller should operate independently of other parameters which cannot be detected here. 4.2 Types of Closed-loop Control A distinction is made between Closed-loop Control and the so-called Integral Reset. In the first control system, the control value is directly influenced by the setpoint/actual value differential. For example, an absolute dimming value is sent to the actuators via a feedback function (dependent on the measured lighting level but with a variable proportion of external light). The negative feedback of the control value on the comparison point of the closed-loop control circuit as well as the system deviation with forward gain are governed by one function. The greater the influence on the control value, the higher the failure rate of the system deviation. Integral Reset on the other hand operates according to the two-step principle. The control value for the brightness level of the actuators is modified indirectly or gradually, namely via relative dimming telegrams. After this type of dimming process, the lighting sensor measures the surface again that is to be constantly illuminated, compares it with the setpoint and then decides again in which direction further dimming should take place. The respective level of change carried out to the control value remains constant at each new activation. It is not dependent on the degree of system deviation Two-step control is actually not a proper closed-loop control system as it rarely achieves the required setpoint. This type of control only has an opening/closing point instead of continuous dimming processes which must be provided with a sufficiently large hysteresis to prevent the triggering of continuous opening/closing operations. This type of lighting control is described in more detail under the section “Brightness control”. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 6/34 KNX ADVANCED COURSE 4.3 Usable Bus Devices Since we are specifically discussing the maintenance of a constant level of illuminance, only actuators that allow variable illumination are permitted. They must therefore be dimming actuators. A required characteristic of KNX dimming actuators is that it must be possible to control them in three different ways: switching, relative dimming via 4 bit information and absolute dimming via 8 bit information. Sensors for this control system must first only be able to measure the actual brightness value with sufficient accuracy and frequency without supplying upper limit values in the required band width. As regards accuracy, the sensor that offers a logarithmic resolution is the most beneficial. This means that is must be able to carry out more precise measurements in the lower range than in the upper range as the human eye reacts less to absolutely identical changes with an increasing level of brightness. When judging whether a closed-loop control system is better or worse than another type of system, only a relative estimation of accuracy is necessary. If an adjustment to 1500 lux is required for example and the maximum system deviation is +/- 150 lux i.e. 10 %, this is equivalent to an adjustment to 500 lux at an absolute value of +/- 50 lux. The third component of this control system is a controller which takes over the actual control task. It receives the measured brightness value as an input and compares it with the setpoint which is available e.g. as a parameter (fixed value) or as an object value (can be modified at any time via the bus). From these two values, it can determine the output (control value) according to the implemented algorithm (control function) and send it to the actuator. In practice, particularly due to cost and space restrictions, the manufacturers of these types of components decide to integrate the controllers into the sensors or even to build the entire controller and sensor component into the actuator. 4.4 Characteristics of Sensors and Actuators 4.4.1 Sensors As stated above, brightness sensors that are used for lighting control should have a measured-value resolution available that is adapted to the setpoint. A system deviation below approx. +/- 15% is still not noticed by the user. The accuracy or tolerance of the measuring sensor as well as the losses caused by A/D conversion in the KNX sensor must be added together i.e. lie below this figure. Example: The setpoint is 600 lux; the tolerance is therefore +/- 90 lux. The individual possible measured values must thus be separated by less than 90 lux. The fact that indirect measurements are always carried out causes a problem. It is not the luminous flux of the lamp that is measured, but the reflected light output from the reflected surface. It is easy to imagine that a dark surface is less reflective than e.g. a white desk. The structure of the surface can also influence the recording of the measured value. In principle, it can be said that the light is scattered to a greater or lesser degree and the measured value of the sensor is lower than for direct measurement. Due to the varying reflectance factors, sensor heads must have a variable gain available which can be adapted to the respective requirements. This gain must be carried out in front of the A/D converter as otherwise the resolution is reduced by the gain factor and the control precision decreases. The measured value can thus be adapted via this gain factor under the named requirements in the course of a calibration procedure so Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 7/34 KNX ADVANCED COURSE that it can be used simultaneously as a lux value that can be displayed. The correct measured brightness value is generally sent cyclically by the sensor. The value differential and time interval that are used for sending can be set in a wide range in most cases for the available devices. In addition to the cyclical sending variant, it is also possible to react quicker with event control if the measured brightness value changes significantly. 4.4.2 Closed-loop Controller types The example outlined above now requires a closed-loop controller, which uses the setpoint/actual value comparison to determine how the control value must be modified in order to return to the desired equilibrium of setpoint = actual value. The details of this control technology will not be discussed here, only the feasible alternatives. This so-called closed-loop procedure can contain proportional, integral and differential feedback components. This means: proportional: a direct control output ‘y’ is calculated for the dimming actuator from the setpoint/actual value differential ‘x’ via simple, linear conversion function according to the function y = a.x integral: the control output is integrated with a specific rate i.e. it is zero at the beginning and reaches the calculated value y = a.x.t only after a certain period differential: the control output is determined from the rate of change of the system deviation y = x/t Only the P controller can be used directly by these basic functions of control technology. The use of a P controller however leads to a systematic deviation which cannot be reduced due to the requirement to avoid oscillations. Only an integrating controller would function better in our case as it finds a stable state after a certain period in which it remains while there are no changes to the external light intensity. The D controller reacts very quickly if there is a substantial change in the parameters. The response to this change dies down again after a certain period. Apart from the continuous control of the setpoint, it is now important for an optimum lighting control system that the change in the brightness level runs almost imperceptibly for the user. Extreme external variations in the lighting should also not influence the control output at such a rate that it causes an imbalance. P and D controllers are therefore rarely used for lighting control systems. Only integral action control is in practice sufficient to fulfil the requirements of the user. In most cases, the integral action control has an indirect rather than direct influence on the control output. We are then using the “integral reset” procedure. In practice, this means that the closed-loop controller modifies the control output stepwise and indeed always by the same amount per temporal unit, which is a modification of a true integral controller, since the steps are always of the same size. In the KNX system, 4 bit dimming telegrams (DPT 3.007) are predestined for this as they transfer these constant changes in value that do not contain any different values (apart from the sign) as is the case with an absolute 8 bit control output. Any considerable variations in the parameters always cause the same rate of change. Since the change in brightness should take place gradually, only the step widths 1/64 (1.6%) or 1/32 (3.2%) are recommended for DPT 3.007. 4 bit dimming telegrams are sent continually at a certain rate, provided that the actual value does not meet the setpoint within the hysteresis. If the hysteresis range is reached, the controller stops. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 8/34 KNX ADVANCED COURSE Figure 2: Example of a closed-loop controller with an integrated sensor In the objects of figure 1, it is possible to detect that further possibilities can be implemented apart from the actual dimming function (= control value). These options enable a very convenient use of the control system: Setpoint adjustment via absolute (direct) value control Master /slave function for additional lighting circuits Toggling between manual and automatic mode via all operator functions which the dimming actuator is aware of (i.e. switching, dimming and value setting) The previous statements about the procedure used by DPT 3.007 2 do not however mean that an integral reset can only be carried out with DPT 3.007 only. This procedure can also be implemented with DPT 5.001 telegrams. The controller thus starts with an initial value, mainly 0 or 255, and sends further telegrams as with DPT 3..07, which now contain 8 bit values that are reduced or increased by a constant value compared to the previous value. Some devices also manage to retrieve the present dimming value of the actuator to be controlled and start from this one instead 0 or 100%. The benefit of this procedure compared to DPT 3.007 appears to be that the resolution increases until it reaches steps of 0.4%. This means it is possible to make even finer adjustments in the dimming process. The bus load should however be taken into account since it rises when smaller changes in the value are carried out. The device shown in figure 2 is an example for 8-bit closed loop control. 4.4.3 Actuators No particular requirements are placed on the dimming actuators initially as only the 4 bit or 8 bit object is required for integral reset. It is however important to be able to select whether this type of actuator should switch off or not when dimming down continually. It is likewise the case with the opposite process. If the closed-loop control is switched on, it should be possible to switch on using 4 bit dimming commands. The timing/dimming curve must be active for both 8 bit value dimming and the 4 bit dimming process as the actuator otherwise dims brighter or darker step by step. The KNX dimmers and dimming actuators that are currently available on the market fulfil almost all these conditions which is not always the case with older devices. To optimise the dimming process, the dimming speed Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 9/34 KNX ADVANCED COURSE of the actuator and dimming step width and send interval of the controller should match precisely: If e.g. 1/64 dimming telegrams are sent every 2 seconds, the dimmer must be set so that it makes a full cycle of 0 – 100% in 128 sec and no faster. If it should also be possible to operate the dimmer manually, a shorter dimming period is of course required. Differences can therefore be found in this regard between the available devices as not all of them offer this possibility (see the note in the next section). 4.5 Parameterisation Notes, Flags, Possible Errors, Bus Load etc. The previously named condition (dimming period of 128 sec) is optimised for the control system but not for manual operation. A compromise must often be made: the actuator dims at a slightly slower rate e.g. in 8 sec and the controller transmits at a slightly faster rate to avoid stepwise brightness processes. This increases the bus load however. Alternatively 1/32 is used as a step width instead of 1/64 to reduce the bus load again. This produces a further problem in the case of very bright luminaires (over-dimensioned or still new). The changes in brightness can already be greater than the set hysteresis after a single step of 1/32. This results in continuous fluctuations as the luminaire continually exceeds or falls below the target value. 500 lx Hysteresis Interior lighting External brightness Figure 3: Mismatch of dimming step width and hysteresis The extension of the hysteresis or reduction of the dimming step width can provide some help: 500 lx Hysteresis Interior lighting External brightness Figure 4: Correct ratio of dimming step width and hysteresis Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 10/34 KNX ADVANCED COURSE A better option is the use of dimming actuators with two time bases. This option has become more common since dimming actuators based on BCU2 have come on to the market. It is then really possible to implement a manual and automatic function: manual operation = short dimming time base, automatic = long dimming time base. Figure 5: Objects of a switch/dim actuator with a dual time base Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 11/34 KNX ADVANCED COURSE 4.6 Parameterisation Example 4.6.1 Functions We use 3 KNX components in this layout for a complete control system: a sensor with an integrated controller (type = integral reset by 8 bit), a dimming actuator with a dual dimming time base and a 3-fold push button with text display that enables the following functions. Function Effect Switches actuator on/off, interrupts the CLL*) Switch light manually (basic) control Dim light manually (basic) Dims the actuator, interrupts the CLL control Switch automatic CLL control on/off (basic) Starts the CLL control with the parameterised set point or stops it Set value manually for lighting Sets the brightness value at the actuator between (continuously) (optional) 0 and 100%, interrupts the CLL control CLL control triggered by a movement / presence Presence (optional) detector; or simpler, just by switch Setpoint shift (optional) Variable LUX value setpoint control Only for commissioning (or for advanced users to Calibration recalibrate later) *) CLL: closed loop lighting The usual range in which setpoint values can fluctuate is between 250 lux (lighting level for less demanding activities) and 1500 lux (level for light-intensive laboratory workstations where optical equipment is used such as lenses, microscopes etc.). The sensor must maintain a system deviation of max. +/-15% throughout the range. Two further functions/group addresses are required to calibrate the arrangement after the installation: measured lux value (to compare with the external lux meter) calibration trigger The brightness sensor/controller already mentioned above also enables calibration to be carried out. The address ‘measured lux value’ is not really always necessary but strongly recommended to be used in order to have an indication about how far the real measured value and that one of the KNX sensor differ before the calibration is started. The calibration process will calculate just a (for the user not accessible) gain factor between Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 12/34 KNX ADVANCED COURSE the physically measured light level and the either parameterized or via object adjusted setpoint. 4.6.2 Example The sensor would – after the initial full application download – send a value of 200. But a Luxmeter would see 500 Lux. The setpoint of the sensor is also 500 Lux. (It has to be – otherwise the calibration would be faulty). So after the calibration trigger telegram has been sent, the new measured value would be returned with “500”. Only a connection between the controller and the actuator is now missing: Automatic value control (Master value) 4.6.3 Parameters Figure 6: Control parameters of the closed loop controller Explanations: Operating mode: “Constant light level control” is used for continuous dimming Number of slaves: Only 1 master channel required, so no slaves = 0 Send meas. brightn.: (optional) the sensor value can be displayed and monitored Min. variation…: “15 Lux” means, with deviations of equal or more than 15 Lux a new value will be sent. Setpoint value: “Parameter” or “Comm. Object”; the latter one allows flexible setting of the setpoint Max. var. from setp.: Half of the double sided hysteresis (varies from 15 to 60 Lux) Max. step size …: varies from 0.5 up to 3%; = difference between 2 master value telegrams; Transmit next…: 2 sec; i.e., together with “max. step” 0-100% = 120 sec. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 13/34 KNX ADVANCED COURSE Start and finish…: The controller will firstly read the value status, then calculate the next telegram to be sent, and also stop with a 0% value telegram Figure 7: Parameter (extract) of the switch/dim actuator This setting enables a manually operated dimming speed of 5 sec per 100%. The factor for the “dimming time 2” (plus its base timer “seconds”) rules an automatic dimming time of 120 sec. This time equals exactly the setting of the master channel of the brightness controller. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 14/34 KNX ADVANCED COURSE 4.6.4 Group Addresses To summarise, all the group addresses are listed here again: Figure 8: Group address configuration in a convenient constant lighting control system 4.6.5 Linking of Sensor and Actuator Objects, Operation In our example a push button with text display (LCD) is used to provide proper labelling of the control functions and the (optional) display of values. Very often, however, customers don’t want to spend so much money, so they only use a local pushbutton for simple switching and dimming control as manual override, and the automatic activation will be done e.g. by a central scheduler, or by the twilight sensor on a weather central. Figure 9: Group address links between the 3 KNX devices Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 15/34 KNX ADVANCED COURSE 4.6.6 Additional Notes In general, the actuator is also addressed via central functions (see above) which switch the lights on/off directly or also activate/deactivate the control for example via a time switch. This must also be taken into account in the controller. A direct central switching operation must also switch off the controller with positive drive. These addresses must therefore also be linked to the disable objects of the controller; otherwise the controller will always act against this external input and try to dim up the lights again. 4.7 Installation Notes Many factors are decisive for the optimum installation of a brightness control system. Some are listed here: 4.7.1 Alignment of the Measuring Sensor The surface that is to be measured should be as undisturbed as possible i.e. should never indicate different surface characteristics. External light should not directly penetrate the receiving lens if possible, likewise artificial light. Building ceiling Correct Incorrect Lamp Receiver Suspended ceiling Mounting height 2.5 - 6 m Correct Incorrect Light cone 0 4 4 w n A _ A 5 9 1 Calibration required Measuring sensor +/-15% Daylight Figure 10: Optimum position of the measuring sensor (graphics do not resemble the sensor exactly) 4.7.2 Several Light Strips with a Varying Proportion of External Light: In this case, which rarely occurs, a single brightness sensor is only sufficient if it is possible to generate different control values for the individual actuator channels. If you do not have a controller that can do this, a separate sensor must be installed for each light strip. As mutual influences (mostly unwanted) can arise, a partitioning of the sensors must take place and the overlapping of the lighting surfaces underneath the individual strips must be minimised. It can, however, invariably lead to oscillation processes or at least an unexpected distribution of brightness (although the measured values of the sensors are correct). The technically better solution nowadays is to only control one strip (whereby it is not possible to simply select any strip but the strip which is installed at the window side, which reacts the most sensitively to daylight changes). The other lighting strips are simply Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 16/34 KNX ADVANCED COURSE interfaced via a control function e.g. offset adjustment is a so-called master/slave circuit (see the explanations in section 5). Light strip 1 ~ 26 % Light strip 2 ~ 48 % Light strip 3 ~ 70 % Receiver Slave 2 Slave 1 Master 500 lx required illuminance Necessary artificial light Existing daylight Figure 11: Brightness control of a light strip, combined with offset control for the other light strips 4.7.3 Fundamental Mismatch A mismatch always occurs in this system. This is based on the one hand on the different lighting spectrum of natural light and artificial light and on the other hand, on the different angle of illumination. The more external light comes in, the greater the measuring error, because the natural light also is picked up by the sensor rod directly instead of only from the controlled surface by reflection. A curve of the controlled variable is produced dependent on the external brightness which reaches its minimum in a ratio of 50:50 between the proportion of external and internal light. The system must always be balanced under these lighting conditions. Ф internal [lx] Optimum adjustment value Actual value Setpoint 500 250 Actual internal value Proportion of artificial light Proportion of external light Ф external [lx] Figure 12: Behaviour of the actual value dependent on the level of external light Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 17/34 KNX ADVANCED COURSE 5 Brightness Control 5.1 Areas of Application, Objective In contrast to lighting control in which you wish to achieve individual and optimum levels of light intensity as mentioned above, brightness control is mostly considered with regard to minimising installation costs without fully losing sight of the goal of reducing energy costs. It is however agreed between the planner and user that significant deviations from the setpoint/actual value can occur in the control system. This is particularly the case when only switchable lamps are integrated in the control system. Figure 13: Principle of brightness control 5.2 Types of Open-loop Lighting Control For brightness control, a distinction is made between continuous control and two-step control. A sensor measures an external brightness value which is independent of the internal illuminance that is to be set. Starting from this measured value, the internal control value is determined at first via any calculation function which the room illuminance uses to reach the required setpoint. Technically this is an open control loop. The feedback loop is missing. This has both advantages and disadvantages. It is beneficial that this type of lighting control can never oscillate since the feedback loop has been omitted as mentioned. Starting with the measured value of a single sensor, many different control curves can be differentiated. The disadvantage is that a very extensive adjustment must be carried out for continuous control which takes at least one day. 5.2.1 Continuous Control Continuous control – like the closed-loop control above – requires dimmers or dimming actuators which can be infinitely adjusted. As an automatic adjustment of the control value cannot take place (due to the missing feedback loop), this must be carried out by selecting a control function. In the simplest case, this can be a straight line determined by two pairs of values: a) maximum external brightness above which there should be 100% interior Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 18/34 KNX ADVANCED COURSE lighting and b) minimum brightness level above which the light should be switched off. Moreover, the control module must be in a position to carry out a hysteresis in order to ease control in the extreme range between switched on and switched off. Figure 14: Characteristic curve for brightness control – a hysteresis is advisable 5.2.2 Two-step Control The characteristic curve described in the previous section is further simplified if only two states are possible for the controlled lamps: ON or OFF. Switching value Switch Off point 1 Hysteresis Switch On point 0 0 [ lux ] 2000 4000 6000 Measured value of brightness sensor Figure 15: Principle of two step control Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 19/34 KNX ADVANCED COURSE 5.3 Usable Bus Devices 5.3.1 General A separation between the sensor and actuator technology is advisable. The control system takes over the evaluation of the sensors (including push buttons) and triggers the actuators. 5.3.2 Sensors Almost all the devices that can evaluate external inputs can be considered as sensors for brightness control. This includes the simple two-step control via a binary input that is coupled with a floating contact of a light sensor. The disadvantage in this case is that the switching points and hysteresis cannot be influenced via the KNX by telegram or at least by downloadable device parameters. Analogue inputs with KNX capability which supply a measured value in DPT 9.004 format in lux units are better in this case. The sensors that offer an almost logarithmic resolution of the measured signal are beneficial and of course completely cover the required area. If this is not the case, the measured-value resolution – as mentioned above – should be sufficiently precise for light control values approx. >50% so that visible fluctuations in the brightness level do not occur in the area in which the artificial light is predominant. As we saw above with closed-loop control, the maximum step width may not be higher than a 3.2% dimming value differential. This characteristic must of course also apply here. This means that we should have at least 50/3.2 = 16 steps in the range 50%-100% for the dimming setpoint. You can now easily specify whether a sensor is sufficient in practice or is not precise enough. Example: A sensor records 1000 lux of external brightness, the dimming level lies at 50%. The resolution of the sensor dimming level lies at 50%. The resolution of the sensor must be at least 1000 / 16 = 6.25 lux. A small query regarding the theory – if this sensor with a resolution of 62.5 lux already had a dimming level of 50% at an external brightness of 500 lux – is it suitable or not? 5.3.3 Actuators As stated above under 3.4.3, there is no limit applicable here. All the actuators designed for normal dimming can be used. All the binary outputs can be used again for two-step control. 5.3.4 Controllers The brightness control system covers several different control curves. It is therefore a good idea to implement the functions ‘measure external light level’ and ‘trigger actuators’ in a special module which doesn’t have to be directly linked with the light sensor via cable. In this case, it is possible to concentrate on the optimum position for placing the measuring sensor, as the measuring signal is already formatted as a DPT 9.004 telegram in the KNX-coupled sensor and then routed through the KNX network as appropriate. A controller module is then located in a distribution board which derives a range of different control curves from the incoming measured value. It is of course always possible to interface another system via a gateway in which DDC functions are also available. This is Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 20/34 KNX ADVANCED COURSE not a KNX lighting controller but the conversion is carried out externally in the DDC which then sends new dimming control values in response via the gateway to a new measured value of the lighting sensor. (E.g. gateways to Profibus). Figure 16: Conversion of the measured value of the light sensor in different control curves 5.4 Parameterisation Notes, Flags, Bus Load etc. Having already discussed all the important characteristics of the actuators and sensors involved in the ‘Lighting control’ section, we can now briefly summarise here: statements regarding flags (readability of status objects) and inclusion of manual operation in the automatic system (time-limited interruption of control) also apply here of course. If the lighting should also be switched/dimmed manually via local push buttons or set directly to values, the control system must also be aware of the addresses, otherwise manual operation leads inevitably to an immediate correction by the automatic system. As we no longer have a control loop, it is also possible under certain conditions to implement minimum and maximum limit values for the dimming control value within which the control system operates. Otherwise it is switched off (manual operation). To prevent frequent switching in the two limit ranges, minimum ON and/or maximum OFF times can be requested as well as an ON/OFF hysteresis. The module that can fulfil these additional requirements is of course preferable to those with pure control curve functions. The bus load also plays a role here: it is not merely a question of value dimming but also whether and how the cyclical and/or event–controlled sending of the lighting measured value should be set best. It should first be considered that each new brightness value from the sensor results in the same number of value dimming telegrams as active control curves. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 21/34 KNX ADVANCED COURSE 5.5 Parameterisation Example Figure 17: Links between switch sensors, actuators and the control unit, consisting of the brightness sensor and control module In the above diagram, it can be seen that it is not only the external brightness and dimming control values (‘set value’) from the controller to the dimming actuators that are important, but also the ON/OFF lighting command, the optional 4 bit dimming and the 8 bit value setting of the manual push button. The application shown is – as in the closed-loop control described in paragraph 3 – able to convert increases and decreases in the dimming value into an adjustment of the control curves. The logic operation of the status value is required however as this determines the parallel displacement of the curve. What is still missing in this diagram would be a true automatic ON/OFF function which is controlled via a time switch. This KNX clock would also use the group addresses ‘Enable/disable control’ and ‘Control ON/OFF’. Figure 18: Parameter of 2 different brightness sensors: linear vs. logarithmic value calculation The setting for “Sending on change” should not be too precise. The 1st sensor allows 5% changes, always related to the last sent value. Such a value calculation goes along with Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 22/34 KNX ADVANCED COURSE the logarithmic impression of brightness by the human eye and is much better than a linear output (equidistant values) of sensor 2. Still an option of limiting the amount of bus telegrams per time unit should be available (not visible in this example here). Regarding sensor 2 (Figure 18 lower image): If a measured value interval of 64 lux is still sufficient in the lower range (see 2nd example above), then the factor should be 8 instead of 4 as shown. During cyclical repetition of the measured value – if parameterised –values like those shown above are completely unsuitable: assuming that 10 control curves are implemented, up to 11 telegrams in total can occur every 650 msec. The bus load would then already be over 30%. The aim should however be to remain below 2%. Assuming that a maximum of 45 telegrams can be sent on the line on average, then 2% would correspond to 0.9 telegrams / sec. In the case of the aforementioned 11 telegrams per measured value, this means that a measured value may be sent approx. every 12 seconds. This timing resolution is probably quick enough, primarily, because the controller calculates the new control values in proportion and does not always send constant dimming steps as in integral-action closed-loop control. The correct parameter combination for sending the cyclical measured values is then: Base = 130 ms; Factor = 12 sec / 130 ms = 92 Dimming value Measured 250 value 250 0 250 500 200 1000 150 2000 125 3000 75 4500 25 8000 25 1000 8000 Figure 19: Value table for lighting control: a monotone falling curve is important The table shown in the diagram figure 19 can be specified arbitrarily at first. An approximation of a comparable constant lighting control system can mainly be achieved over 3 points. The two values of complete darkness or the level of daylight that is sufficient to light up a room or part of it without artificial light can be quickly determined using a lux meter. The value pair that starts the proportional range should be verified next: in our example this is 500 lux / control value 250 (98%). If there are still considerable deviations in the intermediate lux values, it is possible to ‘recalibrate’ the particularly poor values a few days later. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 23/34 KNX ADVANCED COURSE Figure 20: Parameter of a controller module It is then possible to check whether the curve-specific parameters of the controller (if available) fulfil the requirements of the customer. In our example, that would be the behaviour after bus voltage recovery; the open-loop control would be switched on here the minimum On time: if the external brightness should vary within the limit range so that the control value for the dimmer can fluctuate around the switching point, then the light remains switched on for at least 5 minutes the hysteresis limit values shown mean in our example that the light is only switched off at approx. 9000 lux (since there is then an underrange in the control value of 20) and switched on again at approx. 600 lux because the control value of 30 has been achieved again. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 24/34 KNX ADVANCED COURSE 5.6 Installation Notes The installation instructions for the open-loop lighting control system are reduced to notes about the installation of the sensor head: It must be directed outside or be installed outside the building. Its recording of the lighting level may not be influenced by seasonal variations such as leaves on the trees which stand between it and the sky or snow on the receiving lens. Its measurement may (for interior installation) also not be invalidated by the shutter. An installation behind the shutter or roller blind should be avoided where possible. The presence of shutters require a particular type of control: if proportionally-controlled shutters are present, the louvres of the shutters can be adjusted in parallel to the external brightness instead of the light. For an optimum adaptation of rooms that face different directions, it is advisable to use at least 2 differently positioned sensors: one in a south-east direction and another in a north-west direction. Large buildings may require even more sensors which should then be placed as perpendicular as possible to the respective façade and point upwards. 6 Brightness Control, combined with Master/Slave Control 6.1 Objective With combined open-loop/closed-loop lighting control, you are in general pursuing the aim of saving costs without having to relinquish the benefits of a partially true closed-loop control system. These can be: a simple setting procedure optimum lighting conditions in at least one position in the room always the correct lighting level in the rooms even when combined with light direction and sun protection systems. 6.2 Principle An internal sensor measures the lighting level of a surface that should be regulated – as in closed-loop control which was described in detail above. The measured values of the sensor are further processed in a control program resulting in a control value which is used to trigger the actuator that is responsible for the direct light strip. To eliminate the requirement for further sensors (and also their deviation), it transfers a full control curve via offset adjustment to all other curves. The required offset adjustment can be determined by 2-3 simple measurements: at an artificial lighting level of 25%, 50% and 75%, the necessary offset of the controlled light strips is determined in comparison to the regulated strip to arrive at the required setpoint in lux. The largest recorded differential (upwards) per strip is then taken as this guarantees that the minimum lighting level never falls below the setpoint. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 25/34 KNX ADVANCED COURSE 6.3 Available Devices Since the offset adjustment is derived from the dimming value of a regulated dimming actuator, it would be possible for example to use the active status response (8 bit) of this type of dimming actuator and simply add it to the established offset in a function module or visualisation program. The newly specified control value would then be sent to the next controlled light strip via another group address. This procedure is however only advisable if the function module or visualisation program mentioned are also available or if there is a cost benefit in using them compared to a multi-layered lighting control system. In terms of device implementation, it is much simpler in any case to use multi-channel dimming actuators with an integrated sensor connection and controller application. It is also possible here to configure internal offset connections between the actuator channels so that fewer bus telegrams can be sent. This solution not only saves device addresses but also costs in general. 6.4 Parameterisation Example In the following example, 3 light strips in one room should be regulated or controller with a single dimming actuator and only one light sensor. A time-limited manual operation (switching/dimming) of all 3 channels should be possible using a 4-fold push button. The fourth rocker should switch all 3 dimming channels back to automatic mode. A special ‘cleaning light’ function should also be implemented: when a further 1-fold push button is pressed, the light should be set to full brightness for 1 hour, the closed-loop/open-loop control should be deactivated and then everything should be switched off. Figure 21: Example of a complete 3-channel room control system with an automatic ‘cleaning-light’ function: only 3 bus devices are required The following can also be detected in figure 21: emergency operating mode via local push buttons if the KNX should fail. In the case of the device shown, these push buttons have the additional function of triggering an automatic calibration of the respective sensor channel, if it acts as a master sensor in the closed-loop control. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 26/34 KNX ADVANCED COURSE 6.5 Installation and Solution Notes The most important factor in this option of open-loop/closed-loop lighting control is again the optimum selection of the installation place and the alignment of the sensors. The essential points have already been mentioned above but there is one additional factor: in combined closed-loop/open-loop control systems, it must be at least ensured, that in the situation of complete outdoor darkness all lights must be equally turned on to the same value (which should be ruled by the specification of the lighting system). A pure additive / subtractive offset control however means on the other hand, that the difference between the master and the slave will always be equal or less than the given value. The master dimming value can range between 0 and 100%, but the slave is limited to less than this due to the offset. That means: If e.g. slave 1 = master + 20% (master at the window side), and slave 2 = master + 40%, then both dependant rows can only be controlled in the range 20 – 100 resp. 40 – 100 %. If the master has reached 0%, again we have 2 options: the slaves shut off together with the master, then it is too dark there, or they stay on, then it is too bright. But at least at full darkness all rows are at or above the required lux value setpoint. If you look at the same situation, but now with the master in row 3 (darkest area), with a negative offset to the slaves, this means, at high outdoor light levels the dimming works fine, but the closer you come to full darkness, the more unequal the distribution of light would be. In the end row 1 reaches only 60%, row 2 goes to 80%. That this is not the optimum, is self explanatory. So the only conclusion can be: The sensor must be mounted in the window side row which then also must be controlled via closed loop control! Underneath a couple of illustrations to this problem: Figure 22: optimized situation, but only at one point ! Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 27/34 KNX ADVANCED COURSE Figure 23: same as above, but at more external light – worst case situation ! Figure 24: again same configuration, but at complete darkness – rows 2 and 3 “waste” energy! What is the conclusion of the notes mentioned above? If the offset of the slave is positive, then it will always be able to reach 100%, but cannot dim down to 0%, it will turn off with the master. If it is negative, it can switch off, but not reach 100% of dimming level. So there is never a 100% positive solution as with individual light sensors per each row of luminaries. However, using the configuration with the master at the window, and the slaves with positive offsets in the inner parts of the room, will provide a good compromise. The only slight disadvantage is, that the master will either have to turn off late (at more than 500 lx, which avoids the “gap”, but causes a much higher level at darkness, or there will be a situation, when the master turns off at 500 lx, where rows 2 and 3 still would need some light, but will switch of with the master. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 28/34 KNX ADVANCED COURSE This is an issue, which can be cured when a light controller with a dynamic offset control is used (a multiplicative offset instead of a constant one). In this case the slave follows the master via a linear function like this: S = M x ( 1 + O ). O : = Offset [%]; S = Dimvalue [%] Slave; M = Dimvalue Master [%]. It can easily be seen that at M = 100% and O > 0 the value of S reaches 100%. At very small values of M, however, the absolute difference between S and M will come close to 0! Figure 25: Light controller with multiplicative offset 7 Appendix Tasks 7.1 Task 1: Lighting – Control dependent on External Light A room that is fitted with two light strips should receive a brightness control system. Up until now, the light strips have been switched and dimmed individually. The following are used: 1 x 2-fold switch sensor, switching and dimming objects (4 bit) 2 x switch/dim actuators, objects for switching, dimming, value setting and value status must be present. Group addresses for manual control: L1 Switch L2 Switch L1 Dim L2 Dim First put this simple series circuit into operation. The dimmable lighting in the room should now also be controlled by a brightness control module dependent on the external light. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 29/34 KNX ADVANCED COURSE Figure 26: Lighting – Control dependent on external light Required devices: Brightness sensor e.g. Siemens 5WG1 254 3 AB 02 to record the brightness level (external light) Brightness control module e.g. Siemens 5WG1 342 1 AB 01 2-fold push button Project design Define the following new group addresses Brightness value of sensor (control module, sensor) Calibration request (control module) Dimming value for calibration (control module) Brightness value for calibration (control module) L1 Value set (--> switch/dim actuator + control module) L2 Value set (--> switch/dim actuator + control module) L1 Value status (--> switch/dim actuator + control module) L2 Value status (--> switch/dim actuator + control module) Control L1 enable / block (2-fold push button, automatic) Control L2 enable / block (2-fold push button, automatic) Link the bus devices (Control 1 and 2 for L1 and L2). Check the read flag in the brightness sensor GE 253. Use the default parameter setting of the bus devices. Commissioning Put the brightness control module and brightness sensor into operation. You can now determine the control characteristics using the calibration objects. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 30/34 KNX ADVANCED COURSE Establishing the control characteristics for L1 and L2 Switch off the ambient lighting (artificial sun) Dim the lighting to the required brightness value. Note that the window luminaire (L1) requires a lower modulation (see also the sketch of the characteristic curve below). Mark the group address ‘Calibration request’ and select the item “read/write…”. In the telegram monitor then check if it is already online, otherwise connect to the bus first before the next step ! Now be sure the selected group address still is selected; click on the “write” – button and enter the value ‘1’ for control characteristic 1 (L1), then click on “OK”. Change to the ‘Read value’ page and read out the status of the group address ‘Dimming value for calibration’. Note the value. Now read out the status of the group address ‘Brightness value for calibration’. Also note this value. Repeat the process for control characteristic 2 (L2). An interpolation point of the two control characteristics is now known. Determine further points (at least 3) with different ambient light values (simulated external brightness values), whereby the last one should be carried out at the maximum brightness level of the ‘artificial sun’. Your determined values (hex code) could look as follows: Characteristic 1 Characteristic 2 Measured value of sensor Dimming value L1 Measured value of sensor Dimming value L2 02A3 FF 02A3 B8 0651 7A 0651 4F 0F0A 37 0F0A 07 2714 01 2714 00 Converting the determined interpolation points of the characteristic curves As only decimal values can be entered in the parameters for the interpolation points of the characteristic curves, the determined hex values must be converted into decimal values. To do so, use the calculator (scientific) in the ‘Programs’ folder under ‘Accessories’. Example: Control curve 1 Control curve 2 Dimming value Dimming value 255 255 L1 L2 184 122 Measured value 55 675 1617 3850 Measured value 79 7 675 1617 10004 Home and Building Management Systems Lighting Control Lighting Control_E0310a 3850 10004 KNX Association 31/34 KNX ADVANCED COURSE Load control characteristics Enter the established values in the parameters of the brightness control module and download the application. Functional test Test the function. Enable/disable automatic control. Switch lighting on/off manually. Adjust characteristic curve by manual dimming. Optimisation Modify the parameters of the switch/dim actuators to dim brighter gradually. Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 32/34 KNX ADVANCED COURSE 7.2 Task 2: Lighting – Closed Loop Control Master-Slave with separate Actuator Illumination level at a workplace shall be kept constant at 500 lux. Additionally it should be possible to change the parametrised luxvalue setpoint (300 – 800 lux), and the light shall be also manually operable (i.e., automatic / manual changeover shall be possible). As a device for this task the brightnesscontroller type Siemens UP255 shall be used. During the commissioning procedure it has to be calibrated, to adopt it to the prevailing light- and reflexion conditions. Process description see further below! A device to control shall be a 4-gang push button which also can set 16 bit values, or a suitable binary input or a push button interface. Functions of this 4-gang push button: Rocker A: lighting manually on/off + dimming Rocker B: Automatic on/off Rocker C: Presence on/off Rocker D: Upper button setpoint 600 lx; lower button setpoint 400 lx Alternatively (and much better) a display and operation unit would be recommendable, where beside the normal operating functions you can also see the current brightness level indication, and which permits a nearly continuous adjustment of the setpoint. Example: Siemens 5WG1585-2AB11 (UP 585) Display- and operation unit. Project design Create the following group addresses • • • • • • • • • • Licht E on/off Light F on/off Light E dimming Light F dimming Sensor setpoint adjust Calibration trigger Automatic control on/off Presence on/off Dimmvalue set auto Licht E Dimmvalue set auto Licht f Parametrise and link the bus devices Check the necessary read flags in the sensor UP255 and the S/D actuator Use default settings of the device if not otherwise defined Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 33/34 KNX ADVANCED COURSE Used devices Brightness controller UP255 25 S1 Brightness control 909601 Push button 4-gang delta profile 12 S4 On/Off/Dim/Blnd/Displ241301 Dimming actuator like in the basic project Commissioning Save your work Download the devices and test 7.3 General hints for the calibration of lighting closed loop control 1) Start ETS 2) Open the required dim actuators, configure their parameters, create the groups and link them, finally download to the actuator 3) Configure the brightness controller as well: depending on your preference with a fixed setpoint (parameter) or a variable one by object. 4) Don’t forget to link the object “calibration” to a group address! 5) Now adjustment at 50% operating point follows: Prerequisite: External light level in the room >= 50% of setpoint. 6) To achieve that, switch on the lights and close the shutters 7) Now place a precision luxmeter underneath the sensor 8) Then adjust the measured luxvalue at the sensor that it shows approx. 50% of the setpoint. Example: >= 250 lx at setpoint of 500 lx. Best results are made when direct value control (8 bit) is used to set the required dimming value instead of 4-bit dimming. 9) It must be ensured that daylight level is constant enough 10) When the luxmeter now shows the correct setpoint, simply send a telegram to let it calibrate. (this can be achieved either by ETS, or a test push button) 11) The controller should respond with the parameterised setpoint. Now the control is calibrated and can be used. 12) If there is no controller feedback, then the reason can be: value out of range, caused by too bright or too dark surface, too much side light Home and Building Management Systems Lighting Control Lighting Control_E0310a KNX Association 34/34
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users