LRC System Investigation
advertisement

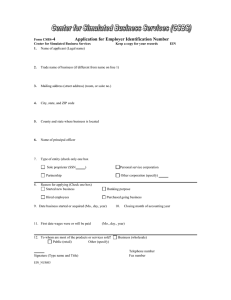
Engineering System Investigation Process Engineering System Investigation Process LRC Circuit Electrical System START HERE Physical System System Measurement Parameter Identification Physical Model Mathematical Model Measurement Analysis Mathematical Analysis Comparison: Predicted vs. Measured YES Design Changes Is The Comparison Adequate ? NO Foundations of Engineering 1 Physical System for Investigation iin iout L R ein C eout LRC Circuit Electrical System Foundations of Engineering 2 Physical Modeling • Simplifying Assumptions – Resistor and Capacitor are pure and ideal; Inductor is ideal but has resistance – Voltage source is ideal and supplies the intended voltage to the circuit no matter how much current (and thus power) this might require – Measuring device is ideal and does not load the circuit by drawing any current iout = 0 iR L iL R ein Foundations of Engineering iC C eout 3 Model Parameter Identification • Measure component values using the DMM by connecting the components across the Current HI and To DMM Current LOW inputs To DMM Current HI Current HI R • LRC Circuit – R = Potentiometer (500 Ω) – L = 22 mH (nominal) – C = 0.1 μF (nominal) Foundations of Engineering C To DMM Current LOW To DMM Current LOW To DMM Current HI L To DMM Current LOW 4 Mathematical Modeling of System iR iout = 0 L iL R ein iC C eout Basic Component Equations (Constitutive Equations) KVL di L dt eR iR R eL L deC iC C dt ein eR eL eC 0 di ein Ri L eout 0 KCL i R i L i C i out 0 dt d deout deout 2 ein R C L C eout 0 LCD RCD 1 eout ein dt dt dt eout 1 d 2 eout deout LC 2 RC eout ein 2 e LCD RCD 1 in dt dt Foundations of Engineering 5 Another Approach: Impedance + Voltage Divider e iR R Impedance: ein i 1/CD LD di e L LDi dt de i C CDe dt e R i e LD i e 1 i CD 1 CD eout eout 1 ein R LD 1 LCD 2 RCD 1 CD LCD2 RCD 1 eout ein d 2 eout de LC 2 RC out eout ein dt dt Foundations of Engineering 6 Mathematical Analysis and Prediction • Analysis & Prediction • LabVIEW Prediction d 2 eout deout LC 2 RC eout ein dt dt eout 1 ein LCD2 RCD 1 L = 22 mH Foundations of Engineering C = 0.1 μF Differential Equation Transfer Function R = 100, 200, 300, 400 Ω 7 MatLab Step and Frequency Response Plots Unit Step Response LRC Circuit Frequency Response LRC Circuit Foundations of Engineering 8 LabVIEW Control Design Toolkit Analysis & Prediction Transfer Function 1 LCD2 RCD 1 Step Response & Frequency Response Foundations of Engineering 9 2nd-Order Dynamic System Model 2 n = a0 undamped natural frequency a2 a1 damping ratio 2 a 2a 0 d q0 dq 0 a 2 2 a1 a 0q 0 b0qi dt dt b0 1 d 2 q 0 2 dq 0 KS steady-state gain q K q a0 0 S i 2 2 n dt n dt qo KS 1 2 qi D D 1 2 n n Step Response of a 2nd-Order System Foundations of Engineering 10 1.8 tr rise time n Unit Step Response of a 2nd – Order Dynamic System Foundations of Engineering 4.6 ts settling time n Mp e 1 2 0 1 1 0.6 overshoot 0 0.6 11 Frequency Response of a 2nd – Order Dynamic System Foundations of Engineering -40 dB per decade slope 12 Some Observations • When a physical system exhibits a natural oscillatory behavior, a 1st-order model (or even a cascade of several 1st-order models) cannot provide the desired response. The simplest model that does possess that possibility is the 2nd-order dynamic system model. • This system is very important in control design. – System specifications are often given assuming that the system is 2nd order. – For higher-order systems, we can often approximate the system with a 2nd-order transfer function. Foundations of Engineering 13 • Damping ratio clearly controls oscillation; < 1 is required for oscillatory behavior. • The undamped case ( = 0) is not physically realizable (total absence of energy loss effects) but gives us, mathematically, a sustained oscillation at frequency n. • Natural oscillations of damped systems are at the damped natural frequency d, and not at n. d n 1 2 • In hardware design, an optimum value of = 0.64 is often used to give maximum response speed without excessive oscillation. • At = n, the phase angle is exactly -90º. Foundations of Engineering 14 • Undamped natural frequency n is the major factor in response speed. For a given response speed is directly proportional to n. • Thus, when 2nd-order components are used in feedback system design, large values of n (small time lags) are desirable since they allow the use of larger control effort before stability limits are encountered. • For frequency response, a resonant peak occurs for < 0.707. The peak frequency is p and the peak amplitude ratio depends only on . p n 1 2 Foundations of Engineering 2 peak amplitude ratio KS 2 1 2 15 • Bandwidth – The bandwidth is the frequency where the amplitude ratio drops by a factor of 0.707 = -3dB of its gain at zero or low-frequency. – For a 1st -order system, the bandwidth is equal to 1/ . – The larger (smaller) the bandwidth, the faster (slower) the step response. – Bandwidth is a direct measure of system susceptibility to noise, as well as an indicator of the system speed of response. – For a 2nd-order system: BW n 1 2 2 2 4 2 4 4 – As varies from 0 to 1, BW varies from 1.55n to 0.64n. For a value of = 0.707, BW = n. For most design considerations, we assume that the bandwidth of a 2nd-order system can be approximated by n. Foundations of Engineering 16 Summary Transfer Function eout 1 ein LCD 2 RCD 1 KS = 1 2 2 D D 1 2 n n Frequency Domain Performance 1.8 tr n 4.6 ts n Time Domain Performance Mp e 1 2 Foundations of Engineering Hardware Parameters Model Parameters 1 R C n KS 1 LC 2 L p n 1 2 2 peak amplitude ratio KS 2 1 2 d n 1 2 BW n 1 2 2 2 4 2 4 4 17 L ein R i C eout R = 200 Ω C = 0.1 μF L = 22 mH Unit Step Response 1 n 21320 rad / sec LC 3393 Hz R C 0.213 2 L KS 1 tr 1.8 0.084 m sec n ts 4.6 1.01 m sec n Mp e Foundations of Engineering 1 2 0.504 18 Frequency Response -40 dB per decade slope p n 1 2 2 =20330 rad/sec 3236 Hz peak amplitude ratio KS 2 1 2 2.403 7.61 dB d n 1 2 20830 rad / sec 3315 Hz BW n 1 2 2 2 4 2 4 4 32057 rad / sec 5120 Hz Foundations of Engineering 19 L R LRC Electrical System K B fo ein i C eout M Mass-Spring-Damper Mechanical System +v fi ein e L e R e C 0 fi f K f B f M 0 di ein L Ri e out 0 dt d deout de out ein L C R C e out 0 dt dt dt d 2 eout de out LC 2 RCdt eout ein dt dt eout 1 ein LCD 2 RCD 1 f i Kx Bv M v 0 Foundations of Engineering f f fi fo B o M o 0 K K M B fo fo fo fi K K fo 1 fi M D2 B D 1 20 K K 2nd-Order Dynamics Systems a0 n undamped natural frequency a2 a1 d 2q 0 dq 0 damping ratio a 2 2 a1 a 0q 0 b0qi 2 a 2a 0 dt dt b0 1 d 2 q 0 2 dq 0 steady-state gain q 0 K Sq i K S 2 2 a0 n dt n dt Electrical System Mechanical System d eout de out LC 2 RC eout ein dt dt 1 R C n KS 1 LC 2 L M d 2 f o B df o fo fi 2 K dt K dt K B 1 n KS 1 M 2 KM 2 Foundations of Engineering 21 Measurements Using LabVIEW • LRC Circuit – Step Response using LabVIEW – Frequency Response using LabVIEW Foundations of Engineering 22 Foundations of Engineering 23 Function Generator FUNC OUT ein -15 V 1 8 2 7 3 6 4 5 Time Response ELVIS Connections + 15 V eout R Buffer Op-Amp L Oscilloscope Channel B+ Power Ground Oscilloscope Channel B- C Power Ground Foundations of Engineering 24 Foundations of Engineering 25 Function Generator FUNC OUT ein -15 V 1 8 2 7 3 6 4 5 Frequency Response ELVIS Connections + 15 V eout R Buffer Op-Amp Analog Input Signal ACH1+ L Power Ground Analog Input Signals ACH0- and ACH1- Analog Input Signal ACH0+ C Power Ground Foundations of Engineering 26 Foundations of Engineering 27