DC distribution system on OFFSHORE SUPPLY VESSELS
advertisement

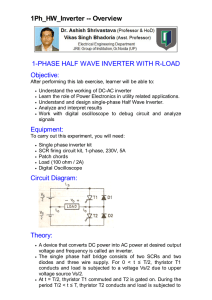
DC DISTRIBUTION SYSTEM ON OFFSHORE SUPPLY VESSELS 2 November 2012 Project in TET4190 Task 17 Group O: Christopher Gebs, David Karlsen, Kristian Thinn Solheim and Line Fiskum Contact person: Ottar Skjervheim in Norwegian Electric P a g e |ii P a g e |iii Preface We will give our gratitude to those who have helped us complete this project, especially Jon Ole Overrein, Arne Færevaag and Marit Laumann from the team at DNV Ship and Offshore Approval Centre. Ottar Skjervheim at Norwegian Electric has provided us with an interesting topic and useful guidance. In addition, professor Tore Marvin Undeland has helped us much both with our technical problems, finding contact persons in the industry and making this project one of the most interesting so far. P a g e |iv Summary This report covers the most important features of a DC-distributed power grid on a small offshore supply vessel, seen from an electric power engineer point of view. The main focus is on the power electronics and how they are integrated in the system. In addition, there is a large focus on circuit breakers and the grid codes for this kind of power system. At the end of the report, a simulation of an inverter with a motor drive is built and analysed. The program used for this is Simulink which is a tool for modelling, simulating and analysing multidomain dynamic systems. Most of the information which is presented and used is collected from the IEEE Xplore Digital Library, the textbook Power Electronics; Converters, Applications and Design, IEC standards and DNV. These are regarded as trustworthy sources making this report credible. A few persons which are eminent in their respective professions are also used to back-up the conclusions. A DC-distribution system reduces fuel consumption and the weight of the electrical system. There are no published standards regarding DC distribution on ships. Redundancy in the system is vital to comply with the functional requirements of ships today, and will also be vital to get a future DC system approved. The three phase inverters should use IGBT and be phase width modulated. The rectifiers can consist of diodes or thyristors. The benefit with using rectifiers with thyristors is that they can control the output voltage. The drawback is that they are more expensive. Inverter filters are not required in series with the motor drives, but LCL-filters should be used at the AC loads. Circuit breakers exist for the chosen system, which operates at 5 MVA, but is a limiting factor for the size of the system. Introduction This report looks into the opportunities and challenges regarding DC distribution with a special focus on power electronics. The first part gives a summary of why and where DC is better suited than AC distribution systems. An introduction to grid codes point out the current requirements regarding this new system. The DC-breaker, which is one of the most challenging single component in the system is well described. Discussed power electronics components are rectifiers, inverters and inverter filters. At the end, a simulation of an inverter with a motor drive is made. In order to make the report as realistic as possible, a small offshore supply vessel is used as a model throughout the entire report. The reason for choosing a supply vessel is because of its large variations in power demand. It is known that a DC distribution grid will be most effective in this type of vessel. P a g e |v Contents 1 Abbreviations .................................................................................................................................. 1 2 System description .......................................................................................................................... 2 2.1 The electric power distribution system ................................................................................... 2 2.2 System Parameters.................................................................................................................. 3 2.3 AC and DC Distribution System: Advantages and Disadvantages ........................................... 4 2.4 Grid Codes ............................................................................................................................... 4 2.4.1 Grid codes for offshore vs onshore systems ................................................................... 5 2.4.2 Grid codes for DC distribution systems on ships ............................................................. 5 2.5 3 Direct Current Circuit Breakers ............................................................................................... 6 2.5.1 Introduction ..................................................................................................................... 6 2.5.2 Basic working principles of DC circuit breakers............................................................... 6 2.5.3 Commercially available breakers for applications <1kV.................................................. 7 Power electronics ............................................................................................................................ 8 3.1 Power semiconductors ............................................................................................................ 8 3.1.1 Diode ............................................................................................................................... 8 3.1.2 Thyristor .......................................................................................................................... 8 3.1.3 Controllable switches ...................................................................................................... 8 3.1.4 Comparison ..................................................................................................................... 9 3.2 Three phase rectifier ............................................................................................................... 9 3.2.1 General overview ............................................................................................................ 9 3.2.2 Uncontrolled rectifier (with diodes) .............................................................................. 10 3.2.3 Controlled rectifier (with thyristors) ............................................................................. 10 3.3 Three-phase inverter ............................................................................................................. 11 3.3.1 General overview .......................................................................................................... 11 3.3.2 PWM in three-phase voltage source inverters.............................................................. 11 3.3.3 Rectifier mode of operation .......................................................................................... 12 3.3.4 Inverter discussion......................................................................................................... 12 3.3.5 Inverter filters ................................................................................................................ 12 3.3.1 Filter discussion ............................................................................................................. 14 4 Simulation of an inverter ............................................................................................................... 15 5 Conclusion ..................................................................................................................................... 17 6 Bibliography...................................................................................................................................... i 7 Attachments .................................................................................................................................... iv P a g e |vi 8 Appendix........................................................................................................................................ xiv 8.1 DC-breakers ........................................................................................................................... xiv 8.1.1 8.2 Future DC-breakers ....................................................................................................... xiv Filter........................................................................................................................................ xv 8.2.1 Analysis of the different filter configurations ................................................................ xv Figures Figure 1: Onboard AC system [1]............................................................................................................. 2 Figure 2: Onboard DC distribution system. ............................................................................................. 2 Figure 3: The chosen circuit breaker [14] ................................................................................................ 7 Figure 4: Three-phase diode rectifier [14].......................................................................................... 9 Figure 5: Three-phase thyristor rectifier [14]. ......................................................................................... 9 Figure 6: Left: basic inverter. Right: Three-phase PWM waveforms [15] ............................................. 11 Figure 7: Different filter configuration circuits [24] .............................................................................. 13 Figure 8: Simulink model of an inverter ................................................................................................ 15 Figure 9: Half period of Vab .................................................................................................................... 16 Figure 10: Close up of Vab, Vbc and Vca ................................................................................................... 16 Figure 11: Diode i-v characteristic b) non-ideal c) ideal .......................................................................... iv Figure 12: Thyristor i-v characteristic b) non-ideal c) ideal (the thyristor based switches mentioned in this text have similar characteristics with the turn off capability added.).............................................. iv Figure 13: IGBT i-v characteristic b) non-ideal c) ideal .............................................................................v Figure 14: SCR construction .....................................................................................................................v Figure 15: Summary of power semiconductor device capabilities [15] .................................................. vi Figure 16: Basic arrangement of a DC circuit breaker [12]. .................................................................... vi Figure 17: Waveforms in a diode rectifier cirucuit (Ls = 0) ..................................................................... vii Figure 18: Waveforms in a diode rectifier circuit with the effect of Ls .................................................. vii Figure 19: Operation modes: (a) circuit; (b) inverter mode; (c) rectifier mode; (d) constant Ia [17] ... viii Figure 20 Line current in a three phase thyristor converter as a function of α [15]............................... ix Figure 21: Line current in a three phase thyristor converter with the presence of Ls [15]..................... ix Figure 22: Output voltage for a three phase thyristor converter [15] .................................................... ix Figure 23: Characteristics of L-Filter: (a) output power as function of DC link voltage and inductor inductance; (b) harmonic current as function of DC link voltage and inductor inductance; and (c) harmonic current as function of switching frequency and inductor inductance [24]. ........................... xi Figure 24: Characteristics of LCL-Filter: (a) output power as function of DC link voltage and inductor inductance; (b) harmonic current as function of DC link voltage and inductor inductance; and (c) harmonic current as function of switching frequency and inductor inductance ................................... xii Figure 25: Interruption of a load current in a DC circuit [30] ................................................................ xiv Figure 26: Two-stage thyristor circuit breaker arrangement showing the device connected to a constant DC-voltage source and terminated by a short-circuited load [32] .......................................... xv P a g e |vii Tables Table 1: Components .............................................................................................................................. 3 Table 2: System Parameters .................................................................................................................... 3 Table 3: Characteristics of the plant, collected from Table 1 and Table 2 .............................................. 7 Table 4: Power semiconductor device comparison ................................................................................ 9 Table 5: New values for Simulink model [29] ........................................................................................ 15 Table 6: Clippings from an ABB sales brochure, DC breakers [14] ...........................................................x P a g e |1 1 Abbreviations ABS BV CB DNV GL GTO IGBT IMO LR MCT MOSFET PWM SCR SOLAS - American Bureau of Shipping Bureau Veritas Current Breaker Det Norske Veritas Germanischer Lloyd Gate Turn-Off thyristor Insulated Gate Bipolar Transistor International Maritime Organisation Lloyd’s Register Mosfet Controlled Thyristor Metal–Oxide–Semiconductor Field-Effect Transistor Pulse Width Modulation Silicon-Controlled Rectifier Safety Of Life At Sea P a g e |2 2 System description 2.1 The electric power distribution system Currently, many ships employ radial electric power distribution in which the generators are connected to a number of switcboard panels, and the AC is then distributed throughout the ship to load centers [2]. This system is presented below in Figure 1. Figure 1: Onboard AC system [1]. The industry is now looking at the possibility of an onboard DC grid instead of AC which is a new electric power distribution concept. Figure 2 presents an example of a onboard DC grid. Figure 2: Onboard DC distribution system. As shown in Figure 2, the generators supply power to the DC distribution bus through power electronic converters. The power electronic converters rectify AC to DC and regulate the DC-bus voltage. The AC loads are served through inverters which convert DC to AC. In an AC grid a rectifier and inverter is used to control the speed of an induction motor. The AC voltage is first converted to DC in the rectifier and then inverted back to AC. In a DC grid only the inverter is needed at the motor, but a rectifier is then needed at the synchronous generator. This means that independent of the distribution system both of these power electronic devices are needed, but the location of the rectifiers are changed. For the other loads in the ship AC is still needed. This means that for the system chosen in this project the DC grid will require two more inverters than the AC grid. P a g e |3 In this example it is chosen to have four motors of 0.8 MW. One advantage of having several smaller generators is the possibility to vary the number of generators, so that the rest of the generators run at an optimal load. This is of interest for ships with varying need for engine drive. Another advantage is that multiple generators gives redundancy. Several minor generators are also easier to place in the main engine room. All branches are protected by removable fuses to ensure that a fault is removed from the system, and that the component can be fixed without shutting down the entire system. The DC distribution system in Figure 2 includes a circuit breaker, which is closed during normal operation. If there is a short circuit fault in one part of the system, the circuit breaker will open, isolating the rest of the system. The vessel can still operate sufficiently to ensure that the minimum operation requirements are met. In the DC approach all thruster trasformers are omitted. Instead all generated electric power is fed directly or via a rectifier into a common DC-bus that distributes the electrical energy to the load. In some projects, the main switchboard is also omitted [3]. 2.2 System Parameters The main advantage of a DC distribution system is the ability to run the power system efficiently at any output power. This is particularly useful in ships that spend much time running at low load levels, for instance an offshore supply vessel. Figure 2 shows a conceivable system for a small offshore supply vessel with the size of important components listed in Table 1. Most supply vessels have larger rated power than 5 MVA but no breaker capable of breaking larger currents was found. Table 2 gives an estimate of the systems parameters at rated power. The DC distribution grid is insulated from earth [2]. This system is used to choose a breaker in section 2.5 and it is the basis of simulations in chapter 0. Table 1: Components Name Size Generators 1.25 MVA Motors 0.8 MW AC-load 0.40 MW Total load # 4 4 2 Total 5 MVA 3.2 MW 0.8 MW 4.0 MW Table 2: System Parameters Name Size VDC 1.0 kV IDC 5.0 kA Isc,max <50 kA A rule of thumb is that the short circuit current of a generator will be up to 10 times the nominal current flowing from the generator [3]. This means that the circuit breaker needs to be designed for short currents of at least . In addition, capacitances to ground and the motors produce some short circuit currents. These additional currents are lower than the currents from the generators, meaning that I sc, max <50.0 kA. P a g e |4 2.3 AC and DC Distribution System: Advantages and Disadvantages One of the main benefits with the DC distribution system is lower fuel consumption. This is mainly because the DC grid allows the diesel engines to run at variable speed for top fuel efficiency at each load level. ABB predicts the cut in fuel consumption to be up to 20% [1]. This will result in considerably reduced greenhouse-gas emissions [4] and money saved [5]. Another advantage is saved space. Siemens claims that the DC distribution system will result in 30% less space required for electric –power equipment [4]. The transformers are for instance not needed, and these are big and expensive components. The DC distribution system also gives flexibility of placement of the electrical equipment. This allows for significantly more cargo space and a more functional vessel layout [1]. There will be reduced losses or cheaper conductors in a DC system since the current a given conductor can carry is 1.22 times larger for DC than AC [3]. However, these costs are negligible compared to other components in the system. With the new DC grid concept, it is also possible to easily integrate modern large scale battery systems. The batteries can act as sole energy source for the low load conditions, handle peak loads without starting standby generators and act as energy buffer for optimized energy production [6]. A disadvantage of the DC grid is the large currents during fault and this may be the greatest challenge with the DC grid. In an AC grid, the circuit can much easier be disconnected because of the currents zero-crossing. See chapter 2.5 for more about circuit breakers. 2.4 Grid Codes Grid codes are technical specifications given by the operator of a system to ensure a safe and predictable power supply. They specify what standards a facility connected to the system has to comply with and what can be expected of the power supply. Norway and most other countries are members of IMO [7] and have ratified their conventions. The Norwegian Ministry of Trade and Industry have made detailed agreements regarding delegation of regulatory authority with five classification societies: DNV, LR, BV, GL and ABS [8]. When a classification society is given regulatory authority they can veirfy a ship on behalf of the flagstate. They verify that the ship is built according to both the governmental regulations of the flagstate and obligations from international conventions ratified by the flagstate. Classification societies like DNV and ABS use their extensive knowledge of the IMO regulations, other standards and experience with ships to build up their own set of minimum requirements. Since all standards are based on IMO regulations and conventions, DNV and ABS standards will be quite similar. Which standards a ship has to comply with depends on the flag state, and additional demands from the buyer. It is important to note that the regulations in most cases only state the functional requirements for the safe operation of a maritime electrical installation. This wide definition is why many countries, insurance companies, and ship-owners state that a ship must be classified by DNV, ABS or other trusted classification societies. P a g e |5 2.4.1 Grid codes for offshore vs onshore systems Ships with an electrical power system consist of many of the same components as onshore power systems. Therefore the grid codes regarding power systems onshore deal with many of the same problems as those on an offshore vessel. Offshore power grids are limited in size, and they have large loads connected. Because of this, they will have different limits and focus areas compared with stronger grids. The basic concept is though roughly the same when comparing these two systems. A big difference between onshore and offshore grid regulations is the IMO SOLAS convention. It adds an extra layer of safety to the offshore standards. For instance IEC 60092-501 section 4.1.3 [9] state that “any single failure in one converter shall not result in complete loss of propulsion”. The statement is specifically for ships with only one propulsion motor, but the concept of redundancy is a common focus throughout offshore standards. 2.4.2 Grid codes for DC distribution systems on ships Standards for DC distribution systems on offshore drilling platforms exist, but according to DNV [2] these systems are based on old technology and thus the standards are not applicable to the upcoming DC distribution systems. Consequently there are no standards regarding a DC distribution system on board ships and thus no given limits [2]. The main reason for this is that the emerging solutions from Siemens, ABB, and other manufacturers all have different approaches using different technologies and solutions both between each other and compared to previous installations. Distribution systems in a new ship will be built entirely by one manufacturer and will not necessarily use standard components. The lack of a standardised systems and components makes definite limits impossible to obtain. Because of this no definite limits regarding voltage variations, THD etc. will be given in this document. New systems will have to comply with the same functional requirements that apply to today’s marine electrical systems. As long as the manufacturers use bespoke components and design the entire system they have some leeway regarding how they meet the functional requirements. 2.4.2.1 Functional requirements for safe operation The following quite general requirements are based on a meeting with DNV representatives [2], and the DNV offshore standard DNV-OS-D201 [10]. 2.4.2.1.1 General All electrical equipment shall be permanently installed and “electrically safe”. This shall prevent injury to personnel, when the equipment is handled or touched in the normal manner. (DNV interpretation of SOLAS Ch.II-1/4.1.3) 2.4.2.1.2 Redundancy As previously mentioned, offshore vessels must have a satisfying degree of redundancy in essential systems. The systems which are regarded as essential depend on the vessels classification. An example of a system that is essential for all offshore vessels is the propulsion system. It is imperative that an offshore ship should not lose all propulsion power because of a failure in one component. 2.4.2.1.3 THD Equipment producing transient voltage, frequency and current variations, THD, and EMC shall not cause malfunction of other equipment on board, neither by conduction, induction or radiation. P a g e |6 Power electronics will add harmonic distortion to an AC-network. How much a component is allowed to make depends on how much distortion is already present in the system and the limits given in the grid codes. If the expected production of harmonics exceeds these limits, measures to limit the harmonics should be applied. DNV [1] refer to IEC 61000-2-4 [11] and states that the THD in an AC distribution system should be limited to 8%, and in addition no single order harmonic shall exceed 5%. If the entire system is designed for larger distortion the THD can be larger. Since our system has small separated AC systems it should be possible to make some parts of the system capable of withstanding higher harmonic distortion if this problem occurs, and still be within the functional requirements. 2.4.2.1.4 Filters Filters are a common solution to limit the harmonics. To ensure safe operation special considerations should be made to avoid resonance with overharmonics and overheating of capacitors. The system shall be able to operate within its design limits even if a part of the filter is tripped. DNV has experienced that a filter in unbalance will damage the system. Consequently if a filter becomes unbalanced the system must disconnect the filter and still be able to route sufficient amounts of power to essential consumers. 2.5 Direct Current Circuit Breakers 2.5.1 Introduction The acceptance of DC distribution system on board ships with respect to efficiency, reliability and controllability will strongly depend on the availability of the circuit breakers, making them one of the key enabling technologies [12]. There are significant differences between the requirements of AC and DC circuit breakers; DC breakers have to interrupt short-circuit very quickly because of the absence of zero-current crossings, and to dissipate the large amount of energy which is stored in the inductances in the system. From appendix 8.1 further information, and the derivation of Eq. (1), is found. The energy dissipated during an interruption can be estimated by the following equation: ∫ ( ) Eq. ( 1 ) The second term is always positive as the system voltage is always greater than the load voltage. This implies that the energy dissipated in the switchgear is equal to or greater than the magnetic energy stored in the circuit prior to the interruption. In addition, a contribution that depends on the load and the interrupting time will be added. 2.5.2 Basic working principles of DC circuit breakers The current in a DC circuit can be brought to zero by generating a counter voltage of similar or larger amplitude than the system voltage. This counter voltage can be produced by inserting additional resistance or inductance in the current path. The energy of the DC system is dissipated across this device. The larger the counter voltage, the smaller the time needed to interrupt, but the larger the energy that is dissipated in the device DC breakers with current limiting and energy dissipating function of an arc are commonly used in LV and MV applications, as this system is [12]. P a g e |7 An alternative is to have several parallel paths in the breaker and to separate the requirements to different elements. The simplest is one nominal current path and one parallel path with a linear or nonlinear resistive element. The nominal current path typically consists of an interrupter with low ohmic losses in closed position, which is, so far, only possible with movable metallic contacts. Upon opening of these contacts, an arc is established and its arcing voltage is used to commutate the current to the resistive path where the energy of the system is then dissipated. The advantage is that the interrupter in the nominal current path only needs to produce a voltage sufficient for commutation and not for counteracting on the full system voltage. In addition, the breaker does not need to have a large energy dissipating function, which typically improves its interruption capability. If the commutation path only consists of a linear resistor, the arc voltage of the interrupter still has to be very high. A gradual insertion of resistors or nonlinear resistors to limit the required commutation voltage would be better. The commutation process can be eased by adding other elements, such as a capacitor which temporarily takes the current flow. More recent developments make use of actively controllable resistances of solid-state devices [13] For most of the practically realized DC circuit breakers at higher voltages, separate commutation and energy absorbing paths have been used, as illustrated in Figure 16. The commutation path may then be a series resonance consisting of a capacitance and inductance so that current oscillation between the nominal and the commutation path can occur at the natural frequency. If the amplitude of the oscillating current is larger than the system DC current, a current zero crossing occurs in the nominal path and the interrupter can interrupt the current [12]. 2.5.3 Commercially available breakers for applications <1kV A circuit breaker which fits the system is chosen even though no power flow analysis nor short-circuit analysis are made. This is done in order to make the project a bit more down-to-earth. By using the tables from ABB’s sales brochure [14], it is possible to find a suitable circuit breaker. The assumptions made are listed in Table 3. In order to choose a correct circuit breaker, is important to choose a breaker which operates with values better than the ones in Table 3. With reference to the type of network, the suitable table shall be identified among the ABB’s tables 9-10-11, which are found in Table 6. The column with the performances referred to a network voltage higher than or equal to the plant voltage shall be identified, in this example Un ≤1000 VDC. From the column considered, the circuitbreaker which would seem suitable for its performances under short circuit conditions is the CB type E3H (I=50 kA), but according to the table relevant to the rated uninterrupted current (Table 6) it is necessary to pass to a CB type E6H since it has Ib= 5 kA. Table 3: Characteristics of the plant, collected from Table 1 and Table 2 Name Type of network Network voltage Rated current absorbed by the loads (Ib) Short-circuit current Description Insulated 1 kVDC 5.0 kA <50 kA Figure 3: The chosen circuit breaker [14] P a g e |8 Therefore the suitable circuit-breaker is a four-pole circuit-breaker type E6H 5000 with PR1122123/DC In=5000 A. The solution of the connection is shown in Figure 3. 3 Power electronics This chapter contains information about the power electronics in the system, including inverters, rectifiers and filters. DC circuit breakers, which are one of the key enabling technologies for a DC distribution system, will also be covered in the end. 3.1 Power semiconductors The following subsections are based on [15]. 3.1.1 Diode IEC 60050 states that a diode is a “two-terminal semiconductor device having an asymmetrical voltage-current characteristic”. The diode is a semiconductor device with one PN junction. The i-v-characteristic in Figure 11 shows how a non-ideal diode will behave. It will be forward biased, conducting, when the anode potential is positive with respect to the cathode. When the potential is opposite the diode will be reverse biased and not conducting. 3.1.2 Thyristor IEC 60050 states that a thyristor is a “bi-stable semiconductor device comprising three or more junctions which can be switched from the off-state to the on-state or vice versa”. The original thyristor is the silicon-controlled rectifier (SCR). It gives the user control of when the thyristor should start conducting when it is forward biased. Newer devices that are within the IEC definition are able to turn the thyristor on and off independent of the voltage potential. The i-v characteristic of a thyristor is given in Figure 12. A basic thyristor (SCR) behave like a diode when the voltage potential make it reverse biased, but when it is forward biased it will only start conducting if a small ignition current is applied to its gate. The gate is created by having three PN junctions, J1,J2,J3. This is illustrated in Figure 14. J1 and J3 behave like the PN junction in a diode, but J2 needs to be excited by an external source to become conducting. This makes the thyristor a semicontrollable unit. 3.1.3 Controllable switches Thyristors like GTO and MCT are controllable both when they are conducting and when they are blocking the current. Other controllable power semiconductor devices are IGBTs and MOSFETs. The IGBT’s i-v characteristic is given in Figure 13, MOSFETs will have a similar i-v characteristic. Controllable switches are more expensive than unidirectional thyristors but the controllability gives new opportunities that in many cases will be worth the extra investment. For instance pulse-width modulation requires a controllable switch. IGBTs are used in inverters with power ratings up to a few MW, for larger ratings GTOs or other thyristor based devices are used. P a g e |9 3.1.4 Comparison Both the thyristor and diode have limits regarding how large voltage potential they can block, but for this text it is assumed that the applied voltage is kept inside these limits. The controllable switches will normally have lower reverse blocking capabilities. This is because the switches are normally used in inverters that are only applied a DC voltage. When designing a converter two important factors are the cost and functionality of the final device. The cheapest option is the diode and the price will increase with the controllability and thus the complexity of the switch. If for instance pulse width modulation is a functional demand for the converter the inverter must be built with controllable switches. Other important factors are the voltage loss when the switch is closed, how fast it is able to turn on and off, the power ratings etc. as seen in Table 4. The proportions of the device capabilities can be seen in Figure 15. Table 4: Power semiconductor device comparison Device Diode SCR GTO MCT IGBT MOSFET Power capability Switching frequency High + High + High Medium Medium Low (Slow) (Slow) Slow Medium Medium Fast On-state losses Low Low Low Low Medium High Power needed to switch ON/OFF Low/ Low/High Low/Low Low/Low Low/Low 3.2 Three phase rectifier 3.2.1 General overview A rectifier converts AC into DC. The process is called rectification. In industrial applications, where three-phase AC voltage are available, it is preferable to use three-phase rectifier circuits because of their lower ripple content in the waveforms and a higher power-handling capability [15]. The threephase rectifiers can be divided into half-wave rectifiers and full-wave rectifiers. The full wave rectifier uses every half wave of the input voltage, while the half wave rectifier only uses every second half wave. This gives the full wave rectifier some advantages. The average DC output voltage of the full wave rectifier is larger than in the half wave, and the output has much less ripple. The focus here will be on the full wave rectifiers. The rectifiers are further divided into two groups; uncontrolled rectifiers and controlled rectifiers. Figure 4: Three-phase diode rectifier [14]. Figure 5: Three-phase thyristor rectifier [14]. P a g e |10 3.2.2 Uncontrolled rectifier (with diodes) The uncontrolled rectifier uses diodes to convert the input AC into DC. In these rectifiers, the power flow can only be from the AC side to the DC side and the output DC is uncontrolled. The advantage of this rectifier, compared to the controlled rectifier, is that this rectifier is less expensive [16]. Figure 4 shows a three-phase full-bridge rectifier, which consists of six diodes, and is a commonly used circuit arrangement [15]. The diodes are numbered in order of conduction sequences, and upper and lower diode cannot conduct at the same time. The diodes are configured so that the polarity of the output is the same, regardless of the polarity of the input. The result is a pulsating DC voltage [15]. At least one diode from the upper diodes (1, 3 and 5) and one from the lower diodes (4, 6 and 2) must conduct for the input current to flow. In the upper group, all diodes have their cathodes connected together. Therefore, the diode connected to the most positive voltage will conduct and the other two will be reverse biased. In the bottom group, all diodes have their anodes connected together. Therefore, the diode connected to the most negative voltage will conduct, and the other two will be reverse biased [17]. Ignoring the effects of Ls and C in Figure 4, the output waveforms can be represented as shown in Figure 17. The current commutation here is instantaneous. After including Ls on the AC side, the current will no longer be instantaneous, since there cannot be any sudden changes in current through an inductor. The waveforms are represented in Figure 18. To smooth out and reduce ripple in the voltage output, a capacitor is connected in parallel with the load resistor. Together, the capacitor and the resistor make a filter circuit [18]. 3.2.3 Controlled rectifier (with thyristors) The controlled rectifier converts a constant AC input into a variable DC output. The circuit is shown in Figure 5. Like in the previously described rectifier circuit, the 3 phase controlled rectifier also have three legs. Each leg connected to one of the three phases. The difference is that thyristors are used instead of diodes. Unlike the diode rectifiers, the rectifiers using thyristors make the DC output voltage controllable [15]. When thyristors are used, their conduction can be delayed by choosing the desired firing angle (delaying the instants at which the thyristors are allowed to start conduction). If the firing angle is chosen at 0°, the output of the rectifier will be the same as that of the circuit with diodes. By varying the firing angle, the magnitude of the average output voltage can be controlled [15]. The line current with different firing angels are represented in Figure 20. Here the Ls is ignored, and it is assumed a purely DC current output. In practical thyristor converters, one cannot ignore the AC side inductance Ls. Like in the diode rectifiers, for a given delay angle α, the current commutation takes a finite commutation interval u. A resulting line current is presented in Figure 21, and the output voltage is presented in Figure 22. The thyristor converter can also operate in an inverter mode where the power flows from the DC side to the AC side. When operating in an inverter mode, the delay angle α is between 90° and 180° and Vd has a negative value. P a g e |11 3.3 Three-phase inverter 3.3.1 General overview Inverters are used to transform DC power into three-phase AC power. Today’s inverters use high power switching transistors called IGBT's and/or MOSFETS. A single phase inverter consists of two switches, one from the positive DC rail tied to the common node and one from the negative DC rail tied to the common node. The AC power is extracted from the common node with respect to a centre tapped ground between two capacitors. A good example of an inverter, though not a very efficient one, is an audio amplifier. The only modification to the amplifier is that the input to the amplifier needs to be a constant AC signal representing the desired output frequency [19]. A three-phase inverter is a combination of three single phase inverters along with synchronisation so that the three phase voltages are separated by 120°. Figure 6 illustrates a simple three phase inverter topology. The issue of waveform quality can be addressed in many ways. Capacitors and inductors can be used to filter the waveform. If the design includes a transformer, filtering can be applied to the primary or the secondary side of the transformer or to both sides. Low-pass filters are applied to allow the fundamental component of the waveform to pass to the output while limiting the passage of the harmonic components. If the inverter is designed to provide power at a fixed frequency, a resonant filter can be used. For an adjustable frequency inverter, the filter must be tuned to a frequency that is above the maximum fundamental frequency [20]. Figure 6: Left: basic inverter. Right: Three-phase PWM waveforms [15] 3.3.2 PWM in three-phase voltage source inverters Simple inverters and rectifiers have problems with disturbances in their output signals. A simple rectifier will not obtain a continuous and stable DC-signal, and inverters have problems with variations in the output sinusoidal wave shape. The objective of PWM three-phase inverters are to shape and control the three-phase output voltages in magnitude and frequency with an essential constant input voltage Vd. A triangular voltage waveform is compared with three sinusoidal control voltages to obtain balanced three-phase output voltages, as seen in Figure 6. Modulating, or regulating the width of a square-wave pulse is often used as a method of regulating or adjusting an inverter's output voltage. When voltage control is not required, a fixed pulse width P a g e |12 can be selected to reduce or eliminate selected harmonics. Harmonic elimination techniques are generally applied to the lowest harmonics because filtering is much more practical at high frequencies, where the filter components can be much smaller and less expensive. Multiple pulsewidth or carrier based PWM control schemes produce waveforms that are composed of many narrow pulses [21]. 3.3.3 Rectifier mode of operation It is also possible to install converters which can operate both as and inverter and as a rectifier. See Figure 19. This might be advantageous e.g. if you have a car which can store energy when you break. The phase angle (as well as the magnitude) of the AC voltage produced by the converter can be controlled. If the converter voltage VAn is made to lag EA by the angle δ (keeping VAn constant), the phasor diagram in Figure 19 shows that the active component (IA)p of IA is now 180° out of phase with EA. This results in a rectifier mode of operation where the power flows from the motor to the DC side of the converter [15]. The waveforms of Figure 6 can be used for explaining how to control VAn in magnitude, as well as in phase, with a given (fixed) DC voltage Vd. By controlling the amplitude of the sinusoidal reference waveform vcontrol,A, VAn can be varied. Similarly, by shifting the phase of vcontrol,A, with respect to EA, the phase angle of VAn can be varied. For a balanced operation, the control voltages for phases B and C are equal in magnitude, but ±120° displaced with respect to the control voltage of phase A. 3.3.4 Inverter discussion A three-phase inverter based on IGBTs with PWM as discussed in the preceding two pages fulfils the requirements of the voltages and currents which the inverter will be exposed to [2]. The power required by the propulsion system varies very much, meaning that the mode of modulation needs to be considered from time to time. At the highest power requirements the PWM must be overmodulated [15]. 3.3.5 Inverter filters A filter is very often not necessary for an inverter when the only consumer at the AC side is a motor drive. This is because motors generally do not need pure waveforms of their input currents/voltages. A common solution is to insert an inductor in parallel with the motor. This gives better quality of the input waveforms, but will make it more difficult to control the motor. A motor is controlled by measuring the flux in the motor, but adding an inductor makes it more difficult to calculate this flux [22]. On the other hand, the AC-loads as indicated in Figure 2 need purer sinusoidal input. The next paragraphs present passive filters since they in most cases will be good enough for the requirements of this system [23]. If the system on the AC side of the inverter needs good voltage quality, the problem of injected harmonics becomes critical. These harmonics require the connection of e.g. low pass filters between the inverter and the network. Both switching frequency effects and grid voltage distortion can lead to poor power quality. A well designed filter can attenuate switching frequency components, but the filter will lead to better voltage quality from a grid point of view [24]. P a g e |13 The passive filter not only affects inverter harmonic injection but impacts on the harmonics produced by a coupled non-linear load. There are several techniques for controlling harmonic current flow such as magnetic flux compensation, harmonic current injection, DC ripple injection, series and parallel active filter systems, and static VAr harmonic compensation [25]. The harmonic currents injected by a grid connected inverter can be classified as Low frequency harmonics Switching frequency harmonics High frequency harmonics Each category harmonic must be sufficiently and appropriately attenuated. The current harmonics generated, if injected into the grid, can cause the malfunction of sensitive apparatus connected to the same bus [26]. 3.3.5.1 Filter Circuit configurations If not specified, most of the following text is collected from [24] and its sub references. 3.3.5.1.1 L-filter – First order Attenuation of the basic inductor filter shown in Figure 7 (a) is –20 dB/decade over the whole frequency range. Using this filter, the inverter switching frequency has to be high in order to sufficiently attenuate the inverter harmonics. Figure 7: Different filter configuration circuits [24] 3.3.5.1.2 LC-filter – Second order The LC-filter in Figure 7 (b) is a second order filter giving –40 dB/decade attenuation. Since the previous L-filter achieves low attenuation of the inverter switching components, a shunt element might be needed to further attenuate the switching frequency components. This shunt component must be selected to produce low reactance at the switching frequency. Within the control frequency range, this element must present high magnitude impedance. A capacitor is used as the shunt element. The resonant frequency is given by Eq. ( 2 ). Eq. ( 2 ) √ At and above the swiching frequency, this LC-filter is suited to configurations where the load impedance across C is relatively high. The cost and the reactive power consumption of the LC-filter are larger compared to the L-filter because of the addition of the shunt element. P a g e |14 3.3.5.1.3 LCL-filter – Third order The third filter common in the literature is the LCL-filter configuration shown in Figure 7 (c). It produces better attenuation of inverter switching harmonics than the L- and LC-filters. Key advantages of the LCL-filter are: Low grid current distortion and reactive power production Attenuation of -60 dB/decade for frequencies in excess of the resonance frequency Possibility of using a relatively low switching frequency for a given harmonic attenuation The resonant frequency of the LCL-filter is given by: √ Eq. ( 3 ) With low inductance on the inverter side, it is difficult to comply with IEEE519 [27] standards without an LCL filter. An LCL-filter can achieve reduced levels of harmonic distortion with lower switching frequencies and with less overall stored energy. On the other hand the LCL-filter may cause both dynamic and steady state input current distortion due to resonance. 3.3.5.2 Analysis of the different filter configurations See appendix, 8.2.1. 3.3.1 Filter discussion Since the motor drives which are used in applications like a supply vessel have built-in filters, or do not require filters at all, it is not necessary with an additional filter between the motor drive and the inverter. If a filter is required, it might be enough with an inductor in series between the motor drive and inverter. The other AC-loads (e.g. 230 V grids for standard applications like lighting, computers, electric shavers, refrigerators and so on) should have better voltage quality. In order to fulfil this, a filter should be used. A passive filter is good enough, and an LCL-filter is recommended to use [23]. Failures in capacitors, also called “the capacitor plague”, is a problem. One well-known catastrophic failure of a capacitor is in the aft harmonic filter room on board RMS Queen Mary 2 [28]. In order to avoid this, a three-phase filter should be shut off immediately if a fault occurs. This is especially important if the fault results in an unsymmetrical voltage distribution. A filter should not be overloaded in order to reduce the danger of condenser explosions [2]. The probability of explosions indicates that the filter must be placed in an enclosure environment in order to avoid damages on people and other equipment. These faults are though extremely seldom when placed behind an inverter since the inverter gives good control of its currents and voltages. P a g e |15 4 Simulation of an inverter To simulate the behaviour of an inverter, Simulink with SimPowerSystemsTM was used. The model can be seen in Figure 8. Figure 8: Simulink model of an inverter The circuit was built according to page 2-11 to 2-25 in [29]. Some values were changed to better fit the situation in this project and they can be found in Table 5. The data for the induction motor might not be realistic, but this component is not the focus of this report. Table 5: New values for Simulink model [29] Component Variable DC Voltage Source DC Source Voltage Asynchrounous Machine Nominal Power Asynchrounous Machine Voltage (line-line) Asynchrounous Machine Frequency Asynchrounous Machine Inertia Asynchrounous Machine Pole pairs Fcn Block Expression (k*ω2) Value 1000 V 0.8 MW 550.8 V 60 Hz 0.5 kgm2 4 0.0125*u^2 The Universal Bridge was chosen as an IGBT/Diode inverter. The switches of the inverter are controlled by the signal from the discrete 3-phase PWM Generator block. P a g e |16 The results are from after the system was discretized. From Figure 9 it can be seen that Vab (voltage between phase a and b) is pulse width modulated. For one half period of Vab it can be seen that the pulses are thin at the ends and wide at the middle. This gives on average a sinusoidal voltage at the output. Figure 9: Half period of Vab Figure 10 with Vab, Vbc, and Vca shows that the voltage in the neutral point will be zero. The duty ratio of each switch is 0.5, meaning that three switches are on at the same time. For each leg in the inverter in Figure 6 one switch is always on. In Figure 10 it can be seen that since all line voltages are zero at some points, either all the upper or lower switches must be on. When Vab is positive, TA+ and TB- are on, and when Vab is negative, TA- and TB+ are on. When the voltage is zero both the upper or lower switches have to be on or off. Figure 10: Close up of Vab, Vbc and Vca P a g e |17 5 Conclusion AC grid is the established system for ships today. The industry is now looking at the possibility of replacing the AC grid with a DC grid. The main benefit with a DC grid in ships with large deviation in power demand is reduced fuel consumption and thereby reduced costs and emissions of greenhouse gases. In addition, the new system with DC distribution will result in reduced space and weight of the electrical system. There are currently no published standards regarding DC distribution systems on ships. According to DNV they will require that any new system must comply with their functional requirements for safe operation. A important requirement for electrical systems is that a sufficient amount of redundancy must be built into essential systems. Power semiconductors range from uncontrollable diodes through semi controllable thyristors to controllable thyristor and transistor devices. The price increases with controllability, and power ratings are higher for simpler and less controllable devices. Devices with higher switching frequencies have lower power ratings. It is sufficient to use a three-phase based IGBT inverter regulated with PWM. The type of modulation which should be used is set by the requirement of the load. When the load requires high power, the PWM must be set into overmodulation. The motor drives used in applications like a supply vessel do not require the inverter to have additional filters. On the other hand the remaining AC-loads need filters to acquire a good enough voltage quality. A passive filter, like a LCL-filter should be used. If a fault occurs in a three-phase filter it should be shut off immediately. This is especially important if the fault results in an unsymmetrical voltage distribution. A filter should not be overloaded in order to reduce the danger of condenser explosions. The probability of explosions indicates that the filter must be placed in an enclosure environment in order to avoid damages on people and other equipment. These faults are though extremely seldom when placed after an inverter since the inverter gives good control its currents and voltages. The rectifiers studied here consist of diodes and thyristors. The rectifiers using thyristors are more expensive, but have the advantage that they make the DC output voltage controllable. Both types of rectifiers are relevant for use in the on board DC grid. The breaker is one of the key enabling technologies making it possible to build an on board DC distribution grid. A sufficient breaker for this system of this supply vessel is a four-pole circuitbreaker type E6H 5000 with PR1122-123/DC In=5000 A. It is important to choose a circuit breaker which separates the system quickly, since the energy absorbed by the breaker increases with time. One way to achieve this is by using transistors in the breaker. P a g e |i 6 Bibliography [1] ABB, "Onboard DC Grid. The step forward in Power Generation and Propultion," 2011. [Online]. Available: http://www04.abb.com/global/seitp/seitp202.nsf/0/292d42e87306453dc12579ad0050a45 7/$file/12_10_OnboardDCGrid_Technical-Information.pdf. [Accessed September 2012]. [2] A. Færevaag and J. O. Overrein, Interviewees, DNV. [Interview]. 24 10 2012. [3] J. U. Law, "Justia US LAW, 46 C.F.R. Subpart 111.52—Calculation of Short-Circuit Currents," [Online]. Available: http://law.justia.com/cfr/title46/46-4.0.1.3.14.14.html. [Accessed October 2012]. [4] Siemens, "Ship," Siemens Marine & Shipbuilding, 2012. [5] M. Lauman, Interviewee, Master of Science electrical power engineering. [Interview]. 17 Octobre 2012. [6] Siemens, "New diesel electric propulsion system BlueDrive PlusC," Trondheim. [7] IMO, "International maritime organization; Member states," [Online]. Available: http://www.imo.org/About/Membership/Pages/Default.aspx. [Accessed 30 October 2012]. [8] The Norwegian ministry of trade and industry, "På rett kjøl: Norges offentlige utredninger (NOU) 2005:14," [Online]. Available: http://www.regjeringen.no/nb/dep/nhd/dok/nouer/2005/nou-2005-14/5.html?id=155043. [Accessed 30 October 2012]. [9] N. I. 60092-501, "Electrical installations in ships (Part 501: Special features - Electric propulsion plant)," 15 Oktober 2007. [Online]. Available: http://www.standard.no/en/PDF/FileDownload/?redir=true. [Accessed September 2012]. [10] DNV, "Offshore standard DNV-OS-D201: Electrical installations,," IEEE, April 2011. [Online]. Available: http://exchange.dnv.com/publishing/Codes/download.asp?url=2011-04/osd201.pdf. [Accessed September 2012]. [11] I. 61000-2-4, "Electromagnetic compatibility (EMC) - Part 2-4: Environment - Compatibility levels in industrial plants for low-frequency conducted disturbances, Edition: 2.0," 26 06 2002. [Online]. Available: http://www.standard.no/en/PDF/FileDownload/?redir=true. [Accessed September 2012]. [12] C. M. Franck, "HVDC Circuit Breakers: A Review Identifying Future Researh Needs," IEEE, p. 20, 04 2010. P a g e |ii [13] P. J. B. K. T. L. a. V. Z. W. Pucher, "HVDC switching devices and arrangements," Electra, no. 18, pp. 9-65, 1971. [14] ABB, "ABB circuit-breakers for direct curent applications," Technical Application Paper, [Online]. Available: http://www04.abb.com/global/seitp/seitp202.nsf/0/6b16aa3f34983211c125761f004fd7f9 /$file/Vol.5.pdf. [15] Mohan, Undeland and Robbins, Power Electronics. Converters, Applications, and Design, Wiley, 2003. [16] Mohan, Undeland and Robbins, Power Electronics Converters, Applications, and Design. [17] Mohan, Electric drives: an integrative approach, Minneapolis: John Wiley & sons as, 2001. [18] T. Bartelt, "Wisc - Online," Wisc - Online, [Online]. Available: http://www.wisconline.com/objects/ViewObject.aspx?ID=SSE4303. [Accessed Octobre 2012]. [19] S. Frame, S. Dubovsky and Q. Li, "IEEE PELS," 1995. [Online]. Available: http://ewh.ieee.org/soc/pels/home/Three-Phase%20Inverters.php. [Accessed September 2012]. [20] I. Press, "The Authoritative Dictionary of IEEE Standards Terms, Seventh Edition," ISBN 07381-2601-2, 2000, p. 588. [21] "Wikipedia," September 2012. [Online]. Available: http://en.wikipedia.org/wiki/Inverter#Three_phase_inverters. [Accessed September 2012]. [22] Sintef, Interviewee, [Interview]. September 2012. [23] L. E. Norum, Interviewee, [Interview]. 23 October 2012. [24] K. Ahmed, S. Finney and B. Williams, "Passive Filter Design for Three-Phase," IEEE, 2007. [Online]. Available: http://www.epqu.agh.edu.pl/archives/journal/v13i2/v13i2_8.pdf. [Accessed October 2012]. [25] EL-Habrouk, Darwish and Mehta, "Active power filters; a review," Electric Power Applications, IEE Proce. Vol 147 Issue 5, pp. 403-413, 2012. [26] IEEE Standards 519, "Recmmended Practices and Requirements for harmonic control in electrical power systems," 1992. [27] IEEE, "Update of Harminic standard IEEE:519," 1989. [Online]. Available: http://ieeexplore.ieee.org/application/enterprise/entAddToFileCabinet?arnumber=44238 &icp=false. [Accessed October 2012]. P a g e |iii [28] Marine Accident Investigation Branch, "Marine Accident Investigation Branch," December 2011. [Online]. Available: http://www.maib.gov.uk/cms_resources.cfm?file=/QM2Webreport.pdf. [Accessed October 2012]. [29] MathWorks, SimPowerSystems TM User’s Guide, R2012b Hydro-Québec, Mathworks, 2012. [Online]. Available: http://www.mathworks.cn/help/pdf_doc/physmod/powersys/powersys.pdf. [Accessed October 2012]. [30] M. Runde, Current Interruption in Power Grids, Trondheim: NTNU, 2012. [31] C. Meyer, M. Kowal and R. W. De Doncker, "Circuit Breaker Concepts for Future HighPower DC-Applications," IEEE, 2005. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=1518439. [Accessed October 2012]. [32] P. M. McEwan and S. B. Tennakoon, "A Two-Stage DC Thyristor Circuit Breaker," IEEE, 1997. [Online]. Available: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=602554. [Accessed October 2012]. P a g e |iv 7 Attachments Figure 11: Diode i-v characteristic b) non-ideal c) ideal Figure 12: Thyristor i-v characteristic b) non-ideal c) ideal (the thyristor based switches mentioned in this text have similar characteristics with the turn off capability added.) P a g e |v Figure 13: IGBT i-v characteristic b) non-ideal c) ideal Figure 14: SCR construction P a g e |vi Figure 15: Summary of power semiconductor device capabilities [15] Note: BTJs are not discussed in the text. Figure 16: Basic arrangement of a DC circuit breaker [12]. P a g e |vii Figure 17: Waveforms in a diode rectifier cirucuit (Ls = 0) Figure 18: Waveforms in a diode rectifier circuit with the effect of Ls P a g e |viii Figure 19: Operation modes: (a) circuit; (b) inverter mode; (c) rectifier mode; (d) constant Ia [17] P a g e |ix Figure 20 Line current in a three phase thyristor converter as a function of α [15] Figure 21: Line current in a three phase thyristor converter with the presence of L s [15] Figure 22: Output voltage for a three phase thyristor converter [15] P a g e |x Table 6: Clippings from an ABB sales brochure, DC breakers [14] P a g e |xi Figure 23: Characteristics of L-Filter: (a) output power as function of DC link voltage and inductor inductance; (b) harmonic current as function of DC link voltage and inductor inductance; and (c) harmonic current as function of switching frequency and inductor inductance [24]. P a g e |xii Figure 24: Characteristics of LCL-Filter: (a) output power as function of DC link voltage and inductor inductance; (b) harmonic current as function of DC link voltage and inductor inductance; and (c) harmonic current as function of switching frequency and inductor inductance P a g e |xiii P a g e |xiv 8 Appendix 8.1 DC-breakers From Figure 25 it is possible to develop an equation which verifies that. Figure 25: Interruption of a load current in a DC circuit [30] The circuit equation is Eq. ( 4 ) If the contacts separate at time t=0 and the current is interrupted at t=t1, the energy dissipated in the breaker during the interruption is given as: ∫ ( ) ∫ ( ) ∫ ∫ ( ) Eq. ( 5 ) i0 is the load current. Integrating the first term gives for the energy dissipated during an interruption: ∫ ( ) Eq. ( 6 ) 8.1.1 Future DC-breakers As seen from Eq. ( 1 ) the switching speed is not only “nice to have”, but a clear must for a technical and economical feasible circuit breaker solution [31]. One way to do this is by using circuit breakers based on thyristors [32]. P a g e |xv Figure 26: Two-stage thyristor circuit breaker arrangement showing the device connected to a constant DC-voltage source and terminated by a short-circuited load [32] Thyristor circuit breakers, Figure 26, interrupt current extremely fast, but because of the scale of the energy transfer to the commutation capacitor, they are especially prone to producing short-duration switching overvoltages of excessive magnitude. A novel thyristor circuit breaker device involving two switching operations or stages meet the requirements in European MRT DC system. With this device type, the circuit stored energy is transferred to the commutation capacitor in two stages, which, in so doing, produces significantly lower switching overvoltages than the conventional “single-stage” thyristor circuit breakers. 8.2 Filter 8.2.1 Analysis of the different filter configurations The three different filter configurations will be analysed. The distributed generation unit is assumed to operate in the grid connected mode, with the inverter connected to the grid network through a power filter [24]. 8.2.1.1 L-filter Figure 23 (a) shows the output power as function of DC link voltage and the coupling filter inductance (L-filter) between the inverter and the grid network, based on: Eq. ( 7 ) √ The output power increases with increasing DC link voltage (VDC) and decreasing filter inductance (L). The purpose of the filter inductance is to reduce the current harmonics injected into the grid. The first surface in Figure 23 (b) is the inductor harmonic current which is injected into the grid network. The second surface in Figure 23 (b) is the standard grid injected harmonic current limits. The two surfaces are calculated as a function of DC link voltage and the filter inductance, at a switching frequency of 10 kHz. It is assumed that the grid voltage Vg comprises only a fundamental frequency component and the network is a short circuit at other frequencies. The grid network is assumed stiff, that is, the network impedance is zero. The harmonic current expression is: | | | | Eq. ( 8 ) If harmonic order (h) is greater than 35, the harmonic currents injected to the grid network must be less than 0.3%∙Irated. The choice of filter elements is therefore required to take into account the equation: | | Eq. ( 9 ) Prated is defined by Figure 23 (a). The L-filter cannot achieve the harmonic limit in Eq. ( 9 ). Figure 23 (b) confirms this filter limitation and its inability to sufficiently reduce the harmonic injection current level. One solution is to increase the switching frequency to greater than 20 kHz, as shown in Figure 23 (c). P a g e |xvi 8.2.1.2 LC-filter The limitation of the LC filter is that the shunt element is ineffective when connected to a stiff grid network, where the grid impedance is insignificant at the switching frequency. The output current ripple is the same as the inductor current ripple with an L-filter, where the attenuation depends solely on the filter inductance. 8.2.1.3 LCL-filter In most applications, an isolation transformer is used between the power filter and the grid. This inserts leakage inductance, which is seen by the grid. A modified LC-filter plus leakage inductance will be used in this study, which is basically an LCL-filter type but with constant leakage inductance L2 on the output. The analysis will assume that L2 is equal to the leakage inductance of the isolated transformer. Figure 24 (a) shows the output power as function of DC link voltage and inductor filter inductance. The output power increases with DC link voltage increase and decreasing filter inductance. Figure 24 (b) shows the output grid harmonics and current harmonics limits as a function of DC link voltage and inductance (L1). The switching frequency is 10 kHz, and comparing Figure 23 (b) with the previous LC-filter, it can be seen that the LC-filter with an isolated transformer can satisfy the harmonic limit requirements by a sufficient margin. Figure 24 (c) shows the harmonic grid currents and the harmonic injection limits into the grid network as a function of the switching frequency and inductance. The harmonic requirement can be achieved with a switching frequency greater than 3.5 kHz.