Presenting the D-parameters
advertisement

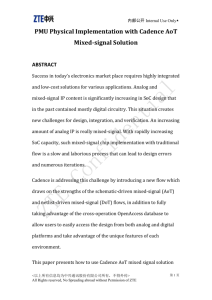
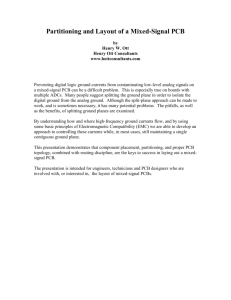
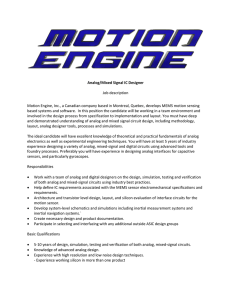
8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 1 Towards a Complete Behavioral Modeling Framework for Mixed-Signal Devices: Presenting the D-parametersTM Diogo C. Ribeiro, Student Member, IEEE, Pedro Miguel Cruz, Member, IEEE, and Nuno Borges Carvalho, Senior Member, IEEE Abstract—Recent advances in radio technology are pushing mixed-signal circuits and devices to higher frequencies and forcing system integration in a single chip. This means that signals are now converted to the digital domain and vice versa much closer to the antenna than before, which forces radio engineers to understand and cope with the new mixed-signal (analog and digital together) paradigm. In this paper a new framework for mixed-signal behavioral modeling is presented and discussed. It is an extension of the well-known scattering parameters and will be termed as D-parametersTM . In this work, both linear and nonlinear methodologies will be considered and analyzed. Furthermore, examples showing the application of this novel framework to some mixed-signal devices are also presented. Index Terms—Linear characterization, mixed-signal systems, nonlinear modeling, software defined radio. I. I NTRODUCTION N EW emerging technologies are bringing together digital and analog systems, devices and components, in a way that they will become inseparable. Until now, this division was clear, since digital domain engineers were focused solely on the digital design part (bit stream evaluation and binary level evaluations), and analog or the self-called radio-frequency (RF) engineers worked on the analog portion of the wireless radio front-end. Traditionally, RF engineers focused exclusively on the analog part mainly because in a typical transceiver the signal was dealt first at RF (high frequency) and then converted to baseband (sometimes called video bandwidth or low frequency). Recent advances in the radio hardware, based on the concepts of software defined radio (SDR) and cognitive radio (CR) are pushing the limits of the analog-to-digital converters (ADCs) and digital-to-analog converters (DACs) to very high frequencies. As a result, lesser or no frequency conversions are “D-parameters” is a registered trademark of Instituto de Telecomunicações. This work was supported by the Fundação para a Ciência e Tecnologia (F.C.T.) under Project EXCL/EEI-TEL/0067/2012: Cognitive Radio Transceiver Design for Energy Efficient Data Transmission (CReATION). The work of D. Ribeiro was supported by the Fundação para a Ciência e Tecnologia (F.C.T.) under the Ph.D. grant SFRH/BD/85163/2012. The work of P. Cruz was supported by the Fundação para a Ciência e Tecnologia (F.C.T.) under the Post-Doc grant SFRH/BPD/92452/2013. The authors are with the Departamento de Electrónica, Telecomunicações e Informática, Instituto de Telecomunicações, Universidade de Aveiro, Campus Universitário de Santiago, 3810-193 Aveiro, Portugal (e-mail: dcribeiro@ua.pt; pcruz@av.it.pt; nbcarvalho@ua.pt). used in the analog path, and the RF signal is directly translated into the digital domain. These new advances are imposing that RF engineers start to think in a higher level of complexity. For example, figures of merit (FoMs), [1], as the error vector magnitude (EVM), noise power ratio (NPR), signal-to-noise ratio (SNR), source or load matching obtained using the voltage standing wave ratio (VSWR), intermodulation distortion (IMD) or adjacent channel power ratio (ACPR), effective number of bits (ENOB) and many others should now be carefully re-thought, since the RF signal is actually a digital replica of the received electromagnetic waveform. Furthermore, the circuits and systems are becoming inseparable [2]. In a typical design, each component of a mixedsignal system can be separated and evaluated individually, but recent integrated circuits are joining all these components by creating a single integrated device, usually called as a systemon-a-chip (SoC). Some examples include entire transmitting and receiving chains, [3], and fully integrated RF transceivers, [4], [5], high-speed wideband DACs, [6], wideband sampling and converting circuits (known as high-speed ADCs) [7]. Thus, RF engineers are now facing a paradigm change and should be aware on how to design, model and characterize such mixedsignal systems. This paper will focus on how to characterize and model these emerging sub-systems from a system-level point of view, so that analog RF system engineers can continue to use and design communication transceivers employing approaches they are familiar with. The paper is divided into a first approach to mixed-signal systems evaluation, followed in section III by the discussion on how to characterize mixed-signal systems for its linear and nonlinear operation supported on a system behavioral point of view. Then, in section IV, laboratory approaches and necessary calibration schemes for mixed-signal characterization will be addressed. Finally, section V will conclude with some practical examples being shown and discussed. II. C HARACTERIZATION OF M IXED -S IGNAL S YSTEMS System identification, characterization and modeling, are scientific research areas that have registered an important growth in recent years. The new digital communication standards have been pushing the limits of radio systems specifications. This continuous demand for higher and higher 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 2 Digital Word log and the other is digital (a bus of bit lines). So, the problem on how to characterize and define a group of FoMs for RF design in mixed-signal systems is raised. In fact, there are two ways of analyzing this kind of systems: 1) the complete analog approach or sometimes called the signal integrity approach, and 2) the system-level behavioral approach. In the first approach, the signal integrity, all ports are considered as analog ones (see Fig. 2(a)), i.e., each bus line is considered as an independent port (“Port 3” through “Port N”), in the same way the RF port (“Port 1”) and the clock (CLK) port (“Port 2”) are considered. In this case, the engineer is searching for the signal quality, called signal integrity, mainly when the mixed-signal device is connected to a signal processing unit, either a field-programmable gate array (FPGA) or digital signal processing (DSP) board. As well, it should be highlighted that now each line of the digital bus is indeed working at gigabit per second (Gbps). This brings the design engineer to discuss and design carefully each bit line path, which should now be considered as a transmission line. The main objective is to guarantee not only that the signal maintains its format, but also that it delivers all bits with similar delays to each bus line. This is becoming very important not only in truly digital circuits, but also in new SDR/CR configurations. Some authors have dedicated a significant amount of work to this characterization problem, [9]. In the second case, the system-level behavioral approach, the design engineer is focused not on the bit line operation, but rather on the information the overall bit-stream contains. The objective in this situation is to evaluate the overall bitstream as a complete waveform in order to compare each and both sides of the device (analog and digital). The final goal is then to give tools to RF engineers so that they can characterize the mixed-signal system using similar approaches to complete analog circuits, i.e., using system level FoMs. It should be referred here that in order to evaluate the digital stream coming out or entering a data converter as an equivalent voltage signal, signal integrity in the digital bus must be assumed. Thus, it is considered that the bit stream is being received or transmitted correctly by the processing unit, i.e., the definition of the bit been equal to a logic “1” or “0” is correctly defined at the sampling instant. In this work a strategy based on scattering waves will be employed to truly capture the behavior of the mixed-signal device under characterization. From a design engineer point of view, one of the crucial advantages in having this characterization is that several procedures could be implemented to overcome the non-idealities that the overall mixed-signal system incorporates. For example, the implementation of postdistortion algorithms to compensate for interferes in receiver sub-systems [10], or pre-distortion algorithms for digital-based transmitters [11], [12]. Several advantages come from the use of a scattering wave strategy for the behavioral characterization of mixedsignal devices. Among others, the direct interpretation of some behavior metrics, in a way similar to what RF engineers are already used to deal with analog S-parameters, as it will be shown later on. And also, the immediate readiness of CAD Sampler (Clock Pad) a1 LNA b1 Quantization ∆t BPF a2 b2 Clock input Figure 1. ∆t ∆t bit1 bit2 bit3 bit4 Binary Value 10 0 1 6 Generalized operation of a mixed-signal system. transceiver performance forces the use of more advanced signal processing techniques together with more efficient and accurate computer-aided design (CAD) tools. The complete identification of linear and nonlinear systems is a challenging topic not only from the formal modeling point of view but also from the practical extraction side where the impairments of the real systems have to be accounted for. As stated in the introduction we will focus our attention in the characterization of radio transceivers, especially the emerging mixed-signal designs. The methods and approaches to characterize some of these types of components are deeply studied and presented in [8]. For instance, concepts as VSWR are there defined for ADCs by considering the associated input impedance (ADCs and DACs can be considered the simplest mixed-signal systems). Specific digital FoMs have also been used intensively for ADCs and DACs, metrics like gain offset, integral nonlinearity (INL), differential nonlinearity (DNL), among others. However, these figures are inherently associated to the bit stream progress in the data converter, and are considered static FoMs [8]. For example, one possible approach to the measurement of these quantities is by using the converter’s output amplitude histogram [8]. Therefore, this measurement is insensitive to the different temporal dynamics that may be present in the characterized device. In a radio frequency approach scenario, this is not conceivable, since the signal actually varies with time, and so time variation exists, and important dynamic effects should be observable, as for instance spectrum characteristics, different response to multisine or modulated signal excitations, etc. [8]. Despite that, in this scenario, if a RF designer has to project a mixed-signal system, where amplifier and filters are combined with data converters, the engineer sees himself in a cumbersome problem. Since, on one side it has an analog port, but on the other side it has a digital bus with several bits, with an added complexity of a sampling clock pad that will impose the time sampling periods and subsequently the discrete-time scale, Fig. 1. This scenario is even more realistic when one considers that sometimes an analog terminal is directly connected to an antenna. It is exactly in this situation where the RF engineer should have a complete picture of how those mixed-signal black-box arrangements behave from a RF point of view, and also from a signal information point of view. In a mixed-signal sub-system, one terminal is actually ana- 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 a1 Port 1 b1 Mixed-signal Component 3 a3 b3 Port 3 a4 b4 Port 4 a5 b5 Port 5 a6 b6 Port 6 receiver a1 Port 1 b1 Mixed-signal Component Binary value to voltage ideal converter db3 Port 3 da3 transmitter b2 a2 Port 2 Clock Port 2 (a) Figure 2. (b) Mixed-signal characterization approaches: (a) signal integrity and (b) system-level behavioral. simulation tools in importing and using these type of models. Therefore, the mixed-signal system will be characterized and modeled in a similar way of the signal integrity analysis, but in this case the bus is considered as a single integrated port. This approach is depicted in Fig. 2(b). As can be seen, the considered device has at least three ports (more can be included), in which two of them are analog corresponding to the RF analog input and to the clock input, being the third port the digital bus evaluated as an overall signal. Thus, for the characterization of this mixed-signal component, it can be considered that at the RF analog port (“Port 1”) incident and reflected scattered waveforms (a1 , b1 ) exist and can be evaluated. In the same way, at the CLK port (“Port 2”), a2 and b2 , can be also considered. At the third port, the digital bit-stream can be evaluated to obtained a state value using (1), this is the binary representation of each sample word sent or received from the mixedsignal device, through the digital bus. The sequence of state values over time represent a conceptual digital waveform, as can be seen in Fig. 3. This waveform can yet be converted to a digital-equivalent voltage wave using (2). StateV alue(t) = bitN (t) 2(N −1) + bitN −1 (t) 2(N −2) + . . . Vdig (t) = + bit3 (t) 22 + bit2 (t) 21 + bit1 (t) 20 (1) StateV alue(t) × VppF ullScale (2N − 1) (2) The voltage wave will be then transformed to da3 and db3 that will allow the comparison to the analog port. An important inference is that the da3 only exists in a receiver configuration bit1 bit2 BinaryValue(t) = bit4(t)23 + bit3(t)22 + bit2(t)2 + bit1(t) bit3 bit4 tk-1 tk tk+1 tk+2 sampling times Figure 3. b2 a2 tk-1 tk tk+1 tk+2 sampling times Convert a bit word onto a binary word value for a 4-bit bus. and db3 in a transmitter configuration, which assumes a perfect match having no reflected signal, see Fig. 2(b). Nevertheless, similar properties of waveforms continue to exist, as for instance the digital received signal will account for the bus line length between the mixed-signal component and the processing unit, which will correspond to a specific delay in time for a given length. Once again, we should be aware that in each bus line the bit-stream is travelling at Gbps speeds, imposing that the overall signal (each digital sample word) is evaluated at frequencies in order of GHz values. III. M IXED -S IGNAL S CATTERING PARAMETERS R EPRESENTATION This section will be devoted to the representation of linear and nonlinear characterization approaches for mixed-signal operation, by taking a strategy based on scattering waves. A. Linear Characteristic Formulation Remembering the traditional S-parameters definition [13] that is applied to entirely analog components, the same approach can be expanded to a mixed-signal scenario. The analog “Port 1” in Fig. 2(b), can be described accordingly to the incident and reflected waveforms. The incident power will be Pincident = |a1 |2 and the reflected power Pref lected =√|b1 |2 . The voltage at “Port 1” can also be defined by V1 = Z0 (a1 + b1 ). It is curious to understand that the signals a1 and b1 does not actually define any power or voltage by themselves, they are actually defined for a system presenting a characteristic impedance of Z0 , and can be called power-waves as in [13]. At this point, the system will be assumed as a 2-port mechanism by incorporating the CLK port into the model. This is similar to what was done for a mixer [14], where the local oscillator (LO) imposes the operation regime. The same happens here with the clock signal. Besides, based on the methodology proposed in [14], wherein it should be guaranteed a clock signal amplitude sufficient to excite the sampling stage and having a known frequency value. In the third port, the digital one, a voltage representation of the digital state can be obtained using its binary value as expressed in (2). Since, RF engineers are not used to deal with voltage values, a conversion to power-waves, da3 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 4 and db3 , is performed. Actually, at high frequencies these are the most important quantities to be measured and have more significance than voltages or currents. It should be stated that these scattering waves, da3 and db3 , are not actually true power-waves in the analog sense, but rather a conceptual representation of those. Nonetheless, when talking about power-waves we should calculate them for a specific system characteristic impedance. But, in the digital world, which characteristic impedance value should be used? Remember that we are not considering the analog waves that travel on the digital bus, but rather the state value that the entire bus represents. So, this value does not have to be the characteristic impedance of the digital bus. Actually, a hypothetic characteristic impedance will be used instead. In order, to have an easy interpretation of the kernels that relate the analog and the digital sides, the characteristic impedance value of the RF analog input port (Z0 analog ) will be used. In this basis, the waveforms da3 and db3 can be defined as: mixed-signal components and D13a2CLK for the equivalent transmitter chain. Not much relevance is being given to the clock port apart from its phase information. Nonetheless, the reflection coefficient (D22 ) can also be defined for this analog clock port in an isolated fashion. This approach is actually similar to the one used for the local oscillator port in a mixer characterization, [14], as said before. It should be stressed that the digital signal in a mixed-signal solution can appear in a different carrier frequency of the analog side provided that a higher than the first nyquist zones (NZs) is used. Thus, the power-wave at the digital version can operate on a different frequency of the analog counterpart, wherein a relationship between these frequencies is straightforwardly obtained by knowing the clock sampling frequency. This phenomenon encounters a similar operation in a mixer conversion approach. B. Nonlinear Characteristic Formulation Vdig , only in transmitter mode da3 = p Z0 analog db3 = p Vdig , only in receiver mode Z0 analog (3) Again, Z0 analog was used in this context to maintain the equivalence to the analog part, but any other value can be used, since this is a pure conceptual waveform. Using this scattering waves approach, several FoMs can be 3 calculated, as for instance, the quantity db a1 can be evaluated in amplitude and phase and swept over the frequency. The variation with ω would thus be included in the developed formulation, which will be called D-parametersTM : D11 (ω) = S11 (ω) = ab11(ω) (ω) a2 =e α,da3 =0 D db3 (ω) 31a2CLK (ω) = a1 (ω) a2 =e α,da3 =0 (4) b1 (ω) D13a2CLK (ω) = da3 (ω) a2 =e α,a1 =0 D33 (ω) = 0 where α e is the clock complex waveform value. The value D31a2CLK (ω) is similar to S21 (ω) in a typical two-port analog network, but again it should be understood that a conceptual power-wave is being evaluated and not a real one in the analog sense, the a2CLK subscript means that these measures were calculated for a specific clock condition α e. These values are calculated for a certain frequency grid of the input signal excitation. In this case, D11 is equivalent to the S11 measured for the analog counterparts. Also, it is important to stress that D31a2CLK (ω) is actually a frequency dependent gain that varies with the input signal a1 (ω) for a specific a2 = α e. This measure is exactly similar to the available gain traditionally defined for amplifiers. Again, it should be referred that D31a2CLK only exists in receiver Nonlinear distortion can be monitored in analog components as the generation of spectra components that are not included in the input signal excitation. One of the most well known demonstration of these are the harmonics of the input signal. In a mixed-signal system such a behavior is also representative of nonlinear distortion phenomenon, concept addressed in [8], [15]. The main difference in a mixed-signal system arises from the fact that if the harmonics are generated in NZs higher than the first, those harmonics will not appear as in a traditional fully-analog system, all organized sequentially, but will follow a different approach based on the sampling frequency. This is true for receiving and transmitting mixedsignal systems, see Fig. 4 as an illustrative example. So, each nonlinear distortion calculation should be evaluated having in mind where the nonlinear components will fall. Again the definition of a variety of FoMs (e.g. total harmonic distortion (THD), ACPR, NPR, third order intercept point (IP3 ), IMD) becomes quite similar to fully-analog systems, but with the evaluation of power defined as before, Pdig = |db3 (ω)|2 . This approach is employed in the IEEE standard for analog to digital converters [8] for NPR evaluation, and is utilized in several vendor application notes [15]– [17]. Other FoMs inherent to mixed-signal environments continue to be used, as for instance the definition of signal to noise and distortion ratio (SNDR), which is typically measured for fullscaled data converters (DAC or ADC) and accounts for the overall noise and distortion being produced. Recent trends in analog components modeling are incorporating nonlinear behavior of fully analog components and systems. The approaches with an higher spotlight are the ones based on the Poly-Harmonic Distortion (PHD) modeling [18], the so called S-functionsTM and X-parametersTM . These models are a linearization of a device response around a large-signal operation point (LSOP) [19]. They consider the device under test (DUT) stimulated by a large signal condition and try to catch its behavior under the assumption that the harmonic superposition principle stands true. 2nd NZ 3rd NZ 1st NZ Discrete-Time Digital Domain 1st NZ 5 f1 2f1 3f1 fCLK/2 fCLK f1 3fCLK/2 Discrete-Time Digital Domain f1 2f1 1st NZ f1 fCLK/2 Figure 4. fCLK/2 Continuous-Time Analog Domain 1st NZ 3f1 2f1’ Sampling Process Continuous-Time Analog Domain 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 2nd NZ 2f1’ 2f1 fCLK/2 3rd NZ fCLK f1 fCLK + f1 fCLK 3fCLK/2 Illustrative example of nonlinear phenomenon occurring in receiving (left) and transmitting (right) mixed-signal systems. Contrarily to what happens in linear characterizations, where a small signal stimulus is assumed and only the fundamental frequency is considered, the PHD large signal models will also look to the harmonics produced by the device and its relationship and/or dependence on the harmonics at each port of the device. Thus, the produced model will contain information describing the influence between all cross harmonic frequencies from the input to the output and vice-versa (linear and nonlinear information). In the same way of the linear characteristic formulation, these nonlinear models can also be defined within this novel framework, assuming that all the previously defined quantities and characteristics remain equally suited. Additional benefits of the PHD modeling characterization include efficient load-pull prediction [20]. This is also an advantage for mixed-signal scenarios, especially for a transmitter device where the output is analog. In this case, as in a power amplifier (PA), the load-pull simulation capabilities could be exploited to improve the desired device performance during its design stage. Two different approaches based on the PHD theory can be followed. The first one does not take into account the CLK port information, which is similar to what was done for the linear characterization, but assuming a large signal stimulus and considering harmonic signals relation. The second approach considers the CLK port as a common input for the system to be characterized. 1) Formulation without CLK port: Considering the CLK signal inside the model without trying to represent it, (5) can be used to relate incident and reflected waves. F Bpm = Dpm |A11 |P m + X S Dpm;qn |A11 | P m−n Apm;qn qn + X T Dpm;qn |A11 | P m+n conj(Apm;qn ) (5) qn In (5) A and B are complex values representing the incident and the scattered waves respectively, both these wave values may represent an hypothetical digital wave depending if it is being applied to model a transmitter or a receiver, as in the linear characterization case. The index q and p correspond to the considered port for the incident wave and for the scattered wave respectively and the n and m correspond to the harmonic index of the incident and scattered waves respectively. Moreover, the component P = e+jφ(A11 ) will assure a phase normalization, introduced for simplification proposes. This approach only allows the characterization of the first NZ, which is a limitation. For instance if one is attempting to model the complete nonlinear behavior of a DAC, only harmonics that fall inside the considered NZ can be characterized. Thus, information about harmonics that fall in different NZs or even replicas of the fundamental cannot be represented using this approach. A similar approach to this formulation had been used in [21], for the case of an integrated transmitter having a reconstruction filter at the output. 2) Multi-port formulation: One of the possibilities to characterize mixed-signal systems using these powerful large-signal models is by exploit its multi-port describing capabilities. Thus, all the three ports will be considered, contrary to what have been done previously. Doing so, the analog CLK port will not be ignored and, for example, its VSWR will also be described inside the model. As it was already explained, in mixed-signal systems, frequency conversion occurs due to the sampling circuit. PHD models inherently support frequency conversion by mapping all the cross harmonic frequencies of all the considered fundamentals (one from the CLK port and one or more from the analog ports), at all the ports of the DUT. The only limitation is that a maximum harmonic index has to be imposed, in order to have a computable model. With this approach, the real behavior of mixed-signal devices is inherently mimic by the model, since all the mixtures between the input signal and the CLK signal will be considered. Furthermore, the level of folding considered in the model (number of NZs modeled) can be controlled by the maximum 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 F m Bp[m,h] = Dp[m,h] (|Ain[1,0] |, |Aclk[0,1] |)P[1,0] + 6 o X n m−n S Dp[m,h];q[n,k] (|Ain[0,1] |, |Aclk[1,0] |) P[1,0] Ap[m,h];q[n,k] q[n,k] + o X n m+n T Dp[m,h];q[n,k] (|Ain[0,1] |, |Aclk[1,0] |) P[1,0] conj(Ap[m,h];q[n,k] ) (6) q[n,k] harmonic level considered for the CLK fundamental. From what has been described it is easy to conclude that by taking this approach, one can compare the mixed-signal device as a mixer. Where the CLK port is in the place of the LO port and the digital port follows the previously established characteristics. The input, output relations between the several ports of the mixed-signal device can then be expressed as in (6). Where, apart from the components that have the same notation as in (5), n and m correspond to the harmonic index of the input fundamental frequency at the considered port for the incident and for the scattered waves respectively, h and k correspond to the harmonic index of the CLK fundamental frequency at the input port and at the considered port for the incident and for the scattered waves respectively. Once again, P[1,0] = e+jφ(A1[1,0] ) will assure a phase normalization for the zero phase of the fundamental input signal. Moreover, (|Ain[1,0] |, |Aclk[0,1] |) corresponds to the considered LSOP, which depends on the amplitude of the fundamental large signal at the input port, |Ain[1,0] |, as well as on the amplitude of the CLK signal, |Aclk[0,1] |. Taking a closer look to (6) and comparing it to the expression for multi-port fully analog devices, [22], the differences are on the name of the parameters (for simple identification purposes only) and on the absence of the P[0,1] which in this case would correspond to the phase normalization of the CLK signal. The absence of P[0,1] is justified by its redundancy in the case of mixed-signal systems. Once, as already explained before, to preserve the assumed signal integrity of the digital signal, it has to be acquired at the same phase of the CLK signal. Thus, during the parameters extraction procedure the CLK phase will be always the same. However, this direct representation of a mixed-signal device by a multi-port PHD model can arise some issues. The main one is its unnecessary excessive complexity. Since the digital signal only has a representation from 0 to fS /2, by doing a complete frequency mapping in all ports there will exist a large quantity of model parameters that will not be used. One can consider, for example, the case of a mixed-signal receiver represented in Fig. 5. It is easily denoted that, it is impossible to have any value in the majority of the mapped frequencies (all above fS /2) at the digital port. As a result, the parameters of the model associated to the mixing products that appear inside the 1st NZ on the digital port will have an associated complex value that could be different from zero. While all the other parameters that correspond to all the other spectral components will always have a value of zero, and thus, are unused and unnecessary. 3) Kernels extraction: The parameters from the equations expressed in (5) and (6) can be extracted using a procedure similar to what is employed in [21] and [23], as it will be briefly described next: • dBm 0 Input −50 −100 dBm 0 0 fs/2 fs 3fs/2 2fs 5fs/2 3fs CLK −50 • −100 dBm 0 0 fs/2 fs 3fs/2 2fs 5fs/2 3fs Output −50 −100 0 fs/2 fs 3fs/2 2fs 5fs/2 3fs Characterized Freqs. 0 fs/2 fs 3fs/2 2fs 5fs/2 3fs Figure 5. Spectrum representation of the input, CLK and output ports of a mixed-signal receiver (with ADC), and representation of frequencies that the PHD model will characterize. Considered orders: Input=3, CLK=2, Mixing=5. Mixed-signal devices need to be driven by a CLK signal so that, they can operate properly. Thus, a large tone needs to be applied at the CLK port of the mixed-signal DUT. Additionally, another large tone is applied to each of the other DUT ports. In this condition, it is considered that the DUT is being stimulated without perturbations. From these non-perturbed measures, the X F kernels can be directly extracted. After, a perturbation needs to be applied to the DUT, a so called “tickle” tone. This “tickle” is a lower power continuous wave (CW) signal at the same frequency or at the harmonics of the previous large tones but, with different relative phases (from 0 to 2π). The “tickle” needs to be applied to all the ports of the DUT individually, even at the digital port when a transmitter is being characterized. The X S and X T kernels are computed from the measurements with the “tickle” present. In order to extract each kernel value, a least mean squares method can be employed as in [19] and [24]. It is worth to mention that during the measurement stage only CW excitation signals are required. 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 Phase Reference Local Oscillator 7 Processing Unit Vector Correction Kernels Comb Generator ADC CLK STIMULUS DIGITAL BUS RF STIMULUS Binary value to voltage ideal converter Calibration Planes Figure 6. Idealized mixed-signal instrument architecture allowing combined analog and digital measurements, which is suitable for linear and nonlinear characterization of mixed-signal receivers or transmitters. Figure 7. Mixed-signal instrument prototype. As usual, in order to get valid information from such an instrument, a calibration scheme is necessary. Moreover, an additional issue is raised because of the combination of analog and digital signal domains into the same characterization tool. The next subsection will handle this situation by showing a couple of options to try surpassing such conditions. A. Instrument Calibration Details Apart from this, it is also important to refer that a calibration procedure is fundamental to measure wave quantities that represent what is really happening at the ports of the DUT, this topic that will be addressed later on. IV. I NSTRUMENTATION FOR M IXED -S IGNAL S YSTEMS Undoubtedly, the devices to be tested are moving away from single-purpose, hardware-centric entities with limited capabilities, to multi-purpose, software-centric entities with endless capabilities. Thus, it is important that the test and measurement systems evolve in the very same way. It is necessary to switch from traditional instruments commonly divided by the type of signal to measure (RF analog, RF digital, DC, optical, and so on) to an unified architecture that integrates all the relevant measurement capabilities in a single instrument. In [25] a first iteration for this kind of emerging approaches was presented, wherein it was suggested a synchronous laboratory-based mixed-signal test bench tailored to the characterization of mixed-signal components or systems. Later, a more detailed overview of measurement strategies and solutions suitable for the characterization and behavior modeling of mixed-signal systems was presented in [26]. There is yet some open issues to be solved, as for instance, create a more widespread solution for the measurement setup. Having this in mind, Fig. 6 shows a generalized architecture for this kind of mixed-signal instrumentation that is capable to perform linear and nonlinear characterization of mixedsignal receivers or transmitters. As can be observed, the analog channels share the configuration of a network analyzer. The remaining port is a digital channel taking the properties of a logic analyzer, in which the signals are no longer analog, but are actually bit sequences. In Fig. 7 a picture of the proposed instrument prototype is depicted. In the calibration process of a Vector Network Analyzer (VNA) using more than one port, a standard that can relate the response between ports must be used in order to obtain a traceable relationship between all the ports [27]. For example, in traditional calibration strategies as Short Open Load Thru (SOLT) or Thru Reflective Line (TRL), the “Thru”, in the first case, and the “Line”, in the second case, were the calibration standards responsible for this error correction. Moreover, in nonlinear analog characterization, using for instance a Nonlinear Vector Network Analyzer (NVNA), more complex calibration methods have to be employed in order to get cross-frequency relationship, both magnitude and phase relationships [28]. For this purpose, a power meter is used for magnitude and a phase reference for phase (typically a Comb Generator (CG)). Using this strategy the “Thru” standard can be left out of the calibration procedure, but both magnitude and phase standards need to be applied at all the ports of the instrument [29]. Contrary to analog-based approaches, in a mixed-signal system it is more difficult to develop a calibration strategy able to correct all the measurement errors. This is mainly because a calibration reference for the mixed-signal “Thru” (a connection between the analog and the digital ports) is totally non-existent. Either way, in the last few years, several attempts have been taken to surpass this limitation when approaching diverse mixed-signal laboratory arrangements for mixed-signal receivers and transmitters characterization, as presented in [21], [30]. The employed strategy, in [21], was similar to the one discussed before for nonlinear analog measurements, using a mixer-based instrument [28], [29]. This analog calibration strategy is usually called as “Absolute Calibration”, since it establishes an absolute magnitude and phase value at the analog calibration plane. Since, the digital waves are conceptual power-waves, their 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 8 Digital domain ITx Analog domain R 90⁰ ∑ Quadrature NCO R IFb R Comb generator utilized during the absolute phase calibration step. 90⁰ Quadrature NCO V. A PPLICATION E XAMPLES This new approach to the characterization of mixed-signal systems, allows to combine analog and digital parts in a seamless way, so that digital and analog RF engineers can work on a common language and framework. Actually, the outcome behavioral model of this characterization will allow engineers to integrate these devices with a great confidence inside CAD/CAE simulators, and optimize the overall system performance. Besides, it will also allow real time RF systems to be able to adapt and to compensate for non-ideal behaviors appearing during real operation. In this respect, the first application example is the characterization of an RF DAC. Predictions suggest that these devices will be strongly used in the next generation of wireless communications, not only at the terminal side, but actually at the base station side, through the use of remote radio head units [12]. Besides, RF DACs are already being used in SDR solutions and digital pre-distorter systems, see Fig. 9. Thus, a characterization of these components is a crucial point in order to allow a more agile, faster and cheaper design stage of the end product. QFb RF ADC Atten. R Figure 9. Illustrative transmitter system based on a DPD architecture and employing high-speed mixed-signal devices. 0 −10 dB −20 −30 Normal Mode − 2.5GSPS Mix Mode − 2.5GSPS Normal Mode − 2.2GSPS Mix Mode − 2.2GSPS Normal Mode − 1.8GSPS Mix Mode − 1.8GSPS −40 −50 −60 0 500 1000 1500 MHz 2000 2500 3000 (a) 0 dB magnitude value can be directly related to the absolute corrected analog waves. However, the use of this method is not enough to correct for phase measurement errors. In other words analog and digital waves will not appear fully synchronized. Because, the phase reference device cannot be employed at the digital port and the phase of a wave is a temporal non-static measurement that does not have any absolute meaning, i.e., a phase of a wave can only be defined in relation to other wave or to a time reference. Thus, additionally procedures have to be employed to surpass this issue. One way to handle this, can be based on [31] where a mixed-signal synchronization was obtain for a sampler-based instrument (in that case an oscilloscope) with the use of a reference signal and a trigger. It is important to stress that for both linear and nonlinear characterizations the absolute calibration method must be employed at the analog side. Thus, the power meter and the CG must be always used. In the current prototype, a commercial power meter is being used to calibrate for the absolute power, while an inhouse developed CG is being used for the absolute phase calibration step. In Fig. 8, it is shown a photo of the used CG. Moreover, the CG’s performance was evaluated in [32], where its applicability for instrument calibration was also discussed. PA BPF 180 −10 0 −20 −180 Mag. Phase −30 −40 0 500 1000 deg Figure 8. QTx RF DAC −360 1500 MHz 2000 2500 −540 3000 (b) Figure 10. Measured linear D-parametersTM extracted from an RF DAC at different operating modes: (a) magnitude of gain (D31 ), and (b) magnitude and angle of D33 . The linear approach was applied at this point. Fig. 10(a) shows the variation of the |D31 | with frequency, as it is visible the output signal varies from operation mode to operation mode. If for instance, the RF DAC is used in a DPD system, this behavior can degrade completely the implemented digital algorithm. In Fig. 10(b), the output matching (D33 ) can also be depicted. Naturally, both its magnitude and phase vary over frequency. Once again, this behavior is of paramount importance when designing a system, since it can degrade the matching between the RF DAC and the antenna or PA, and thus, impact strongly the FoM of the overall system. 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 9 0 10 DS310,110 0 DS31−1,110 DS311,110 DS 31−2,110 −10 −15 −10 −5 Input Power − dBm 0 −20 250 −40 200 −50 0 (a) 200 400 600 Freq. (MHz) 2 −20 −30 0 (b) Figure 11. Several nonlinear multi-port D-parameter kernels obtained from measurements, value over input power: (a) Magnitude of 4 kernels which relate the input at the fundamental with the output at the fundamental of 4 consecutive NZs; (b) Magnitude of 4 kernels which relate the input at the fundamental with the output at the second and third harmonics of 2 NZs. As a second example, the nonlinear multi-port formulation will be employed to characterize a complete digital transmitter, a system as the one represented in the upper branch of Fig. 9 without the filter at the output. Several of the measured kernels are shown on Fig. 11, over a sweep of the input power. Fig. 11(a) shows the equivalent magnitude gain (from the digital input to the analog output) of the fundamental at four consecutive NZs. As expected, with the progression to higher NZs the overall gain value decreases. It can also be observed in Fig. 11(b) that the output 2nd and 3rd order harmonics increase with the increase of the input power, for two different NZs (the 1st and the 3rd ), which again represents an expected behavior. The information gathered with this type of characterization would allow design engineers to improve their pre-distortion techniques to linearize the overall system, and like that improving the outcome of the system. As mentioned before, the receiver side can also be characterized by this framework. As a last example, in Fig. 12 it is shown the D11 and the D13 linear D-parametersTM over frequency, from a medium CLK frequency ADC. The results shown here are from [30]. VI. C ONCLUSIONS In this paper a complete framework for characterizing mixed-signal devices is presented (for both SoCs and full discrete component systems). This type of characterization is of fundamental importance, not only for SDR system designers, but also for DPD designers for PA optimization. Actually the correct characterization of the mixed-signal components Mag. (dB) DS320,110 DS321,110 DS330,110 DS331,110 −10 −5 Input Power − dBm 150 1000 150 Mag. Group Delay 120 0 −10 −15 800 (a) 0 −40 300 −30 10 Mag − dB 350 Mag. Phase −2 90 −4 60 −6 30 −8 0 62.5 125 187.5 250 312.5 375 437.5 500 Freq. (MHz) GD (nsec) −20 400 −10 Mag. (dB) Mag − dB 20 Phase (deg) 30 0 (b) Figure 12. Measured linear D-parametersTM of an ADC over frequency, from [28]: (a) magnitude and phase of D11 ; (b) magnitude and group delay of D13 . become a very important step in the optimization of these circuits [12]. In short, the D-parametersTM framework was presented, instrumentation for its extraction was discussed, and some examples were given to show the importance of the proposed approach. ACKNOWLEDGMENT The authors would like to thank National Instruments, especially Dr. Marc Vanden Bossche, for the support given to this work. R EFERENCES [1] N. Carvalho and D. Schreurs, Microwave and Wireless Measurement Techniques, ser. The Cambridge RF and Microwave Engineering Series. Cambridge University Press, 2013. [2] P. Cruz, D. C. Ribeiro, and N. Carvalho, “Measurement setup for linear characterization of a mixed-signal soc wideband receiver,” in IEEE Radio and Wireless Symposium (RWS), Jan 2014. [3] Linear Technology Corporation, “LTM9003 - 12-Bit Digital PreDistortion uModule Receiver Subsystem,” 2010. Available: http: //www.linear.com/docs/28409 [4] Lime Microsystems, “LMS6002D,” 2012. Available: http://www. limemicro.com/download/LMS6002Dr2-DataSheet-1.2r0.pdf [5] Analog Devices, “AD9361 - RF Agile Transceiver,” 2013. Available: http://www.analog.com/static/imported-files/data sheets/AD9361.pdf [6] Maxim Integrated, “Max5879 14-Bit, 2.3Gsps Direct RF Synthesis DAC with Selectable Frequency Response.” Available: http://www.maximintegrated.com/en/products/ analog/data-converters/digital-to-analog-converters/MAX5879.html [7] Texas Instruments Incorporated, “ADC12D1800RF 12-Bit, Single 3.6 GSPS RF Sampling ADC,” 2014. Available: http://www.ti.com/lit/ds/ symlink/adc12d1800rf.pdf 8.◦ CONGRESSO DO COMITÉ PORTUGUÊS DA URSI, NOV. 2014 [8] IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters, IEEE Std. 1241-2010 (Revision of IEEE Std 1241-2000), Jan 2011. [9] A. Ferrero, V. Teppati, E. Fledell, B. Grossman, and T. Ruttan, “Microwave multiport measurements for the digital world,” IEEE Microw. Mag., vol. 12, no. 1, pp. 61 –73, Feb 2011. [10] J. Pedro and N. Carvalho, “Characterizing nonlinear RF circuits for their in-band signal distortion,” IEEE Trans. Instrum. Meas., vol. 51, no. 3, pp. 420 –426, Jun 2002. [11] J. Wood, “Modeling and Simulation of RF and Microwave Systems,” Maxim Integrated, Tutorial 5542, Jan 2013. Available: http://www. maximintegrated.com/en/app-notes/index.mvp/id/5542 [12] ——, “A glimpse of the future,” IEEE Microw. Mag., vol. 13, no. 7, pp. 60–69, Nov 2012. [13] D. M. Pozar, Microwave Engineering. John Wiley, 2005. [14] D. Williams, F. Ndagijimana, K. Remley, J. Dunsmore, and S. Hubert, “Scattering-parameter models and representations for microwave mixers,” IEEE Trans. Microw. Theory Techn., vol. 53, no. 1, pp. 314 – 321, Jan 2005. [15] J. Karki, “Calculating noise figure and third-order intercept in ADCs,” Texas Instruments Incorporated, Analog Applications Journal - 4Q, 2003. Available: http://www.ti.com/lit/an/slyt090/slyt090.pdf [16] W. Kester, “Intermodulation distortion considerations for ADCs,” Analog Devices, Tutorial MT-012, 2009. Available: http://www.analog. com/static/imported-files/tutorials/MT-012.pdf [17] J. C. Pedro and N. B. Carvalho, Intermodulation Distortion in Microwave and Wireless Circuits. New York: Artech House, 2003. [18] J. Verspecht and D. E. Root, “Polyharmonic distortion modeling,” IEEE Microw. Mag., vol. 7, no. 3, pp. 44–57, 2006. [19] J. Verspecht, D. Williams, D. Schreurs, K. Remley, and M. McKinley, “Linearization of large-signal scattering functions,” IEEE Trans. Microw. Theory Techn., vol. 53, no. 4, pp. 1369 – 1376, April 2005. [20] H. Zargar, A. Banai, J. Cai, and T. Brazil, “An analytical approach to obtain optimum load impedance using X-parameters,” in Workshop on Integrated Nonlinear Microwave and Millimetre-Wave Circuits (INMMIC), Sept 2012, pp. 1–3. [21] D. C. Ribeiro, P. M. Cruz, and N. B. Carvalho, “Synchronous Frequency Domain Measurements for the Extraction of X-parameters in Digital to Analog Transmitters,” in IEEE MTT-S Int. Microwave Symp., June 2013. [22] C. Xie, T. Zhang, and D. Liu, “Using X-parameters to model mixers,” in International Conference on Microwave and Millimeter Wave Technology (ICMMT), vol. 3, May 2012, pp. 1–3. [23] D. Root, J. Verspecht, D. Sharrit, J. Wood, and A. Cognata, “Broad-band poly-harmonic distortion (PHD) behavioral models from fast automated simulations and large-signal vectorial network measurements,” IEEE Trans. Microw. Theory Techn., vol. 53, no. 11, pp. 3656–3664, Nov 2005. [24] P. Cruz and N. Carvalho, “Wideband behavioral model for nonlinear operation of bandpass sampling receivers,” IEEE Trans. Microw. Theory Techn., vol. 59, no. 4, pp. 1006–1015, April 2011. [25] P. Cruz, N. Carvalho, K. Remley, and K. Gard, “Mixed analog-digital instrumentation for software-defined-radio characterization,” in IEEE MTT-S Int. Microwave Symp. Dig., June 2008, pp. 253 –256. [26] P. Cruz, N. Carvalho, and K. Remley, “Designing and Testing SoftwareDefined Radios,” IEEE Microw. Mag., vol. 11, no. 4, pp. 83 –94, June 2010. [27] M. Hiebel, Fundamentals of Vector Network Analysis, First ed. Rohde & Schwarz, 2007. [28] P. Blockley, D. Gunyan, and J. Scott, “Mixer-based, vector-corrected, vector signal/network analyzer offering 300khz-20ghz bandwidth and traceable phase response,” in IEEE MTT-S Int. Microwave Symp. Dig., June 2005. [29] H. Heuermann, “Calibration of a network analyzer without a thru connection for nonlinear and multiport measurements,” IEEE Trans. Microw. Theory Techn., vol. 56, no. 11, pp. 2505–2510, Nov. 2008. [30] D. Ribeiro, P. Cruz, and N. Carvalho, “Corrected mixed-domain measurements for software defined radios,” in 42nd European Microwave Conference, Oct 2012, pp. 554–557. [31] D. C. Ribeiro, P. M. Cruz, A. Prata, and N. B. Carvalho, “Automatic Characterization of RF DACs for Software Defined Radio Applications,” in IEEE MTT-S Int. Microwave Symp., June 2014. [32] D. C. Ribeiro, P. M. Cruz, and N. B. Carvalho, “Evaluation of comb generator performance for nonlinear measurements on mixed-domain instrumentation,” in 6 Congresso do comité Português da URSI, Nov. 2012. 10 Diogo C. Ribeiro (S’09-M’11), was born in Ferreira do Zezere, Portugal in 1988. He received the M.Sc. degree in Electronics and Telecommunications Engineering in December 2011 at Universidade de Aveiro. He is now a PhD student in the same university, since September 2012. Mr. Ribeiro has as main interest software-defined radio measurement and nonlinear mixed-signal characterization. In 2012, he was recognized with the Best Student Paper Award 2012 at the 6th Congress of Portuguese Committee of URSI, and with the 2nd prize in the IMS2013 Measurement Student Design Competition. Pedro Miguel Cruz (S’07–M’13), was born in Ovar, Portugal in 1982. He received a M.Sc. in Electronics and Telecommunications Engineering (2008) and a PhD in Electrical Engineering (2012), both from Universidade de Aveiro, Portugal. From Sept. 2006 to April 2007, he has worked at Portugal Telecom Inovação as a trainee in a project of localization systems based in wireless devices. Currently, he is a post-doctoral researcher with the Instituto de Telecomunicações (IT) being involved in the characterization and modeling of nonlinear distortion in software defined radio and cognitive radio front ends, as well as, high-speed data converters (A/D & D/A). He is a reviewer for IET Electronics Letters, IEEE TCAS-I, TCAS-II and JETCAS and co-authored more than 20 international and national papers including book chapters, journals and conferences. He has been recognized with the 3rd place in the GAAS Association PhD Student Fellowship for EuMIC 2009. Nuno Borges Carvalho (S’92–M’00–SM’05), was born in Luanda, Angola, in 1972. He received the Diploma and Doctoral degrees in electronics and telecommunications engineering from the University of Aveiro, Aveiro, Portugal, in 1995 and 2000, respectively. He is currently a Full Professor and a Senior Research Scientist with the Institute of Telecommunications, University of Aveiro. He co-authored Intermodulation in Microwave and Wireless Circuits (Artech House, 2003) and Microwave and Wireless Measurement Techniques (Cambridge University Press, 2013). He has been a reviewer and author of over 100 papers in magazines and conferences. He is associate editor of the IEEE Transactions on Microwave Theory and Techniques, IEEE Microwave Magazine and Cambridge Wireless Power Transfer Journal. He is the co-inventor of four patents. His main research interests include software-defined radio front-ends, wireless power transmission, nonlinear distortion analysis in microwave/wireless circuits and systems, and measurement of nonlinear phenomena. He has recently been involved in the design of dedicated radios and systems for newly emerging wireless technologies. Dr. Borges Carvalho is the chair of the IEEE MTT-11 Technical Committee and the chair of the IEEE Portuguese Section. He is the chair of the URSIPortugal Metrology Group. He was the recipient of the 1995. University of Aveiro and the Portuguese Engineering Association Prize for the best 1995 student at the University of Aveiro, the 1998 Student Paper Competition (Third Place) of the IEEE Microwave Theory and Techniques Society (IEEE MTT-S) International Microwave Symposium (IMS), and the 2000 IEE Measurement Prize.