5. MBSE Using SysML Part 1 Peak - National Defense Industrial
advertisement

NDIA M&S Committee Meeting
April 22, 2009 Arlington, Virginia
Model--Based SE Using SysML
Model
Part 1: Integrating Design and Assessment M&S
Russell Peak, Chris Paredis, Leon McGinnis
Georgia Institute of Technology
Product & Systems Lifecycle Management Center
www.pslm.gatech.edu
p
g
Part 1 Speaker: Russell Peak
Note: This is the 99-slide ”standard edition” presentation. A 187-slide “extended edition” with
additional context material is available here: http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Standard Edition - v1
Model--Based SE Using SysML
Model
Part 1: Integrating Design and Assessment M&S
Abstract
This presentation highlights Phase 1 results from a modeling & simulation effort that integrates design and assessment
using SysML. An excavator testbed illustrates interconnecting simulation models with associated diverse system
models,
d l d
design
i models,
d l and
d manufacturing
f t i models.
d l W
We th
then overview
i
Ph
Phase 2 work-in-process
ki
i l di a mobile
including
bil
robotics testbed and associated SysML-driven operations demonstration.
The overall goal is to enable advanced model-based systems engineering (MBSE) in particular and model-based X
(MBX) [1] in general. Our method employs SysML as the primary technology to achieve multi-level multi-fidelity
interoperability, while at the same time leveraging conventional modeling & simulation tools including mechanical CAD,
factory CAD
CAD, spreadsheets
spreadsheets, math solvers
solvers, finite element analysis (FEA),
(FEA) discrete event solvers
solvers, and optimization tools
tools.
This Part 1 presentation overviews the project context and several specific components. Part 2 focuses on
manufacturing aspects including factory design, process planning, and throughput simulation.
This work is sponsored by several organizations including Lockheed and Deere and is part of the Modeling &
Simulation Interoperability Team [2] in the INCOSE MBSE Challenge (with applications to mechatronics as an example
domain).
)
[1] The X in MBX includes engineering (MBE), manufacturing (MBM), and potentially other scopes and contexts such as model-based
enterprises (MBE).
[2] http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Citations
RS Peak, CJJ Paredis, LF McGinnis (2009-04) Model-Based SE Using SysML—Part 1: Integrating Design and
Assessment M&S. NDIA M&S Committee Meeting, Arlington, Virginia. http://www.pslm.gatech.edu/projects/incose-mbse-msi/
LF McGinnis (2009-04) Model-Based SE Using SysML—Part 2: Integrating Manufacturing Design and Simulation.
NDIA M&S Committee
C
itt M
Meeting,
ti
A
Arlington,
li t
Vi
Virginia.
i i http://www.pslm.gatech.edu/projects/incose-mbse-msi/
htt //
l
t h d / j t /i
b
i/
Contact
Russell.Peak@gatech.edu, Georgia Institute of Technology, Atlanta, www.msl.gatech.edu
2
Collaboration Approach
Primary Current Team
• Deere & Co
Co.
– Roger Burkhart
• Georgia Institute of Technology (GIT)
– Russell Peak, Chris Paredis, Leon McGinnis, & co.
– Leveraging collaborations
ll b
in
PSLM Center SysML Focus Area (see next slide)
• Lockheed
L kh d Martin
M i
– Sandy Friedenthal
• Vendor collaboration
Page 3
GIT Product & Systems Lifecycle Management Center
Leveraging Related Efforts
•
www.pslm.gatech.edu
SysML-related projects:
– Deere, Lockheed, Boeing, NASA, NIST, TRW Automotive, ...
•
Other efforts based at GIT:
– NSF Center for Compact & Efficient Fluid Power
– SysML course development
• For Professional Masters in SE program
program, continuing ed
ed. short courses
courses, ...
– Other groups & labs
– Vendor collaboration (tool licenses, support, ...)
•
Consortia & other GIT involvements:
–
–
–
–
•
INCOSE Model-Based Systems Engineering (MBSE) effort
NIST SE Tool Interoperability Plug-Fest
OMG (SysML,
(SysML ...))
PDES Inc. (APs 210, 233, ...)
Commercialization efforts:
– www.VentureLab.gatech.edu-based
V t L b t h d b
d spin-off
i ff company (InterCAX):
(I t CAX)
Productionizing tools for executable SysML parametrics
4
Contents
• Phase 1 Overview and Results
– From August,
August 2007 to August
August, 2008
• Phase 2 Progress
– From August, 2008 to August, 2009
5
Contents
• Problem Description
– Challenge Team Objectives
– Characteristics of Mechatronic Systems
y
• Technical Approach
– Techniques and Testbeds
• Deliverables & Outcomes
pp
• Collaboration Approach
Page 6
MBSE Challenge Team Objectives
Phase 1: 2007
2007-2008
2008
Overall Objectives
• Define & demonstrate capabilities for
advanced
d
d modeling
d li & simulation
i l i interoperability
i
bili (MSI)
• Phase 1 Scope
– Domain: Mechatronics
– Capabilities: Methodologies, tools, requirements,
and practical applications
– MSI subset: Connecting system specification & design models
with multiple engineering analysis & dynamic simulation models
• Test & demonstrate how SysML facilitates effective MSI
Note: The objectives to date are primarily based on projects in the GIT PSLM Center sponsored by industry and
government—see backup slides.
Page 7
MBSE Challenge Team Objectives
Phase 1: 2007
2007-2008
2008
S
Specific
ifi Objectives
Obj ti
1. Define modeling & simulation interoperability (MSI) method
2. Define SysML and tool requirements to support MSI
1. Provide feedback to vendors and OMG SysML 1.1 revision task force
3 Demonstrate MSI method with 3+ engineering analysis
3.
and dynamic simulation model types
1. Include representative building block library: fluid power
2 Include hybrid discrete/continuous systems
2.
described by differential algebraic equations (DAEs)
4. Develop roadmap beyond Phase 1
Page 8
Primary Impacts
Enabling Capabilities
Increased Knowledge
Capture & Completeness
Increased
Modularity & Reusability
Increased
Traceability
Reduced
Manual Re-Creation
Increased
Automation
Reduced
Modeling Effort
Increased
Analysis Intensity
Reduced
Tim
me
Reduced
Co
ost
Reduced
Rissk
Inccreased
Understanding
g
Inccreased
Co
orporate Me
emory
Inccreased Artiifact
Performance
Interoperability Method Objectives for MBSE
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
9
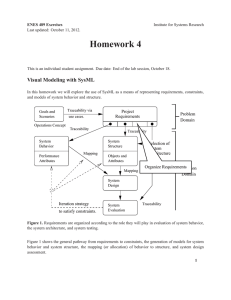
Mechatronics Architecture
Software
Interface
• Displays
Di l
• User Controls
• Haptics
• Remote Links
• ...
• Functions
• Operating
p
g Modes
• State Machines
• Control Systems
• ...
• Modules, Libraries
• Messages
g
• Protocols
• Code
• ...
Actuators
Electronic
Control Unit
(ECU)
Sensors
Communications Bus
“Mechanical System”
• Kinematics
Ki
ti & Dynamics
D
i
• Powertrain
• Thermal
• Fluids
• Electric Power
• ...
Electronics
F db k Control
Feedback
C t l Loop
L
Page 10
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge
g Team Objectives
j
• Technical Approach
– Techniques and Testbeds
• Deliverables & Outcomes
pp
• Collaboration Approach
Page 11
Overall Technical Approach
pp
• Technique Development
– “Federated system model” framework technology
• A.k.a. collective product model
– Modeling & simulation interoperability (MSI) method
– Graph transformation technology
– etc
etc.
• Testbed Implementations & Execution
• Iteration
Page 12
Technical Approach—Subset
pp
• Standards-based framework technology
– Federated system models
– Utilize SysML where appropriate (esp. parametrics)
• Modeling & simulation interoperability (MSI) method
– Harmonize, generalize, extend new & existing work
– COBs,, CPM,, KCM,, MACM,, MRA,, OOSEM,, ...
• Testbeds
–
–
–
–
Develop
p and test techniques
q
iterativelyy
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 13
Example Federated System Model
Logical composition of models based on various
ontologies/schemas
g
((from native tools,, standards,, inin-house))
Propulsion
Fluid Dynamics
• Standard:
• Standard: CFD
• Software • Status: In Development
• Boeing,
STEP-PRP
• Software:• Status: In Development
• ESA, EADS
Electrical Engineering
Cabling
• Standard: AP210
• Standard: AP212
• Software Mentor Graphics
• Status: Prototyped
• Rockwell,
R k ll B
Boeing
i
• Software MentorGraphics
• Status: Prototyped
• Daimler-Chrysler,
D i l Ch l ProSTEP
P STEP
Software Engineering
Optics
Mechanical Engineering
• Standard: NODIF
• Standard: AP203, AP214
• Software - TBD
• Minolta, Olympus
• Software Pro-E, Cadds, SolidWorks,
AutoCad, SDRC IDEAS, Unigraphics,
others
• Status: In Production
• Aerospace Industry Wide, Automotive
Industry
Structural Analysis
• Standard: AP209
Spacecraft Development
Machining
STEP-NC/AP224
•Software:: Gibbs,
•Status:: In Development / Prototyped
Adapted from 2001-12-16 - Jim U’Ren, NASA-JPL
• Standard: AP233
• Standard: STEP PDM Schema/AP232
• Standard: STEP-TAS
•STEP-Tools, Boeing
Systems Engineering
PDM
Thermal Radiation Analysis
• Standard::
Development)
• Software:Rational Rose, Argo, All-Together
• Status: In Production
• Industry-wide
• Software: Statemate, Doors, Matrix-X,
Slate, Core, RTM
• Status: In development / Prototyped
• BAE SYSTEMS, EADS, NASA
• Software: MSC Patran, Thermal
Desktop
• Status: In Production
• Lockheed Martin, Electric Boat
• Software: Thermal Desktop, TRASYS
• Status: In Production
• ESA/ESTEC, NASA/JPL & Langely
• Standard::UML - (AP233 interface In
Inspection
• Standard: AP219
• Software: Technomatics, Brown,
eSharp
• Status: In Development
• NIST, CATIA, Boeing, Chrysler, AIAG
• Software: MetaPhase, Windchill, Insync
• Status: In Production
• Lockheed Martin, EADS, BAE SYSTEMS,
Raytheon
Life-Cycle Management
• Standard: PLCS
• Software: SAP
• Status: In Development
• BAE SYSTEMS, Boeing, Eurostep
14
Model--Centric Framework
Model
Produce, Merge, Enrich, Consume
http://eislab.gatech.edu/pubs/journals/2004-jcise-peak/ (where “collective product model” “federated system model”)
Producer
P
d
Tools
T l
(Primary Authoring)
Tool A1
...
Tool An
Electrical Engineering
Propulsion
Fluid Dynamics
• Standard:
• Standard: CFD
• Software • Status: In Development
• Boeing,
STEP-PRP
• Software:• Status: In Development
• ESA, EADS
Cabling
• Standard: AP210
• Standard: AP212
• Software Mentor Graphics
• Status: Prototyped
• Rockwell, Boeing
• Software MentorGraphics
• Status: Prototyped
• Daimler-Chrysler, ProSTEP
Software Engineering
Optics
Mechanical Engineering
• Standard: NODIF
• Standard: AP203, AP214
• Software - TBD
• Minolta, Olympus
• Software Pro-E, Cadds, SolidWorks,
AutoCad, SDRC IDEAS, Unigraphics,
others
• Status: In Production
• Aerospace Industry Wide, Automotive
Industry
Structural Analysis
• Standard: AP209
• Standard: AP233
• Standard: STEP PDM Schema/AP232
• Standard: STEP-TAS
Spacecraft Development
Machining
STEP-NC/AP224
•Software:: Gibbs,
•Status:: In Development / Prototyped
•STEP-Tools, Boeing
Enricher Tools
(Secondary Authoring)
Systems Engineering
PDM
Thermal Radiation Analysis
• Standard::
Development)
• Software: Statemate,
Statemate Doors
Doors, Matrix
Matrix-X,
X
Slate, Core, RTM
• Status: In development / Prototyped
• BAE SYSTEMS, EADS, NASA
• Software:
S ft
MSC Patran,
P t
Thermal
Th
l
Desktop
• Status: In Production
• Lockheed Martin, Electric Boat
• Software: Thermal Desktop, TRASYS
• Status: In Production
• ESA/ESTEC, NASA/JPL & Langely
• Standard::UML - (AP233 interface In
• Software:Rational Rose, Argo, All-Together
• Status: In Production
• Industry-wide
Inspection
• Standard: AP219
• Software: Technomatics, Brown,
eSharp
• Status: In Development
• NIST, CATIA, Boeing, Chrysler, AIAG
• Software: MetaPhase, Windchill, Insync
• Status: In Production
• Lockheed Martin, EADS, BAE SYSTEMS,
Raytheon
Life-Cycle Management
• Standard: PLCS
• Software: SAP
• Status: In Development
• BAE SYSTEMS, Boeing, Eurostep
Federated System Model
Tool Bj
Consumer Tools
(e.g., Solvers)
Tool Ck
Meta-Building
M
t B ildi Bl
Blocks:
k
• Information models & meta-models
• International standards
• Industry specs
• Corporate
p
standards
• Local customizations
• Modeling technologies:
• Express, UML, SysML,
COBs, OWL, XML, …
15
Technical Approach—Subset
pp
• Standards-based framework technology
– Federated system models
– Utilize SysML where appropriate (esp. parametrics)
• Modeling & simulation interoperability (MSI) method
– Harmonize, generalize, extend new & existing work
– COBs/SysML,
/ y
, CPM,, KCM,, MACM,, MRA,, OOSEM,, ...
• Testbeds
–
–
–
–
Develop
p and test techniques
q
iterativelyy
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 16
The Four Pillars of SysML
1. Structure
2. Behavior
interaction
state
machine
activity/
function
definition
use
3. Requirements
4. Parametrics
Page 17
Model vs. Diagrams
Reality
Model
Diagrams
- Envisioned or actual
- Computer-oriented
- Master repository
- Complete for intended scope
- Human-oriented
- Subset views
Tools
- Authoring, viewing, executing, ...
Acknowledgements: Selected portions from Friedenthal et al. 2008 and MagicDraw samples.
18
SysML Technology Status
www.omgsysml.org
• Spec
v1.0: 2007-09 v1.1: 2008-11 v1.2: WIP
v2.x: RFI preparation workshop - 2008-12
http //
http://www.omg.org/spec/SysML/
omg org/spec/S sML/
• Vendor support
• Learning infrastructure
– Books, vendor courses, academic courses,
INCOSE/OMG tutorial,, public
p
examples,
p , etc.
• Growing production usage
– http://www.pslm.gatech.edu/events/frontiers2008/
– OMG SysML Info Days – 2008-12
• Overall status: Healthy and growing
19
“Wiring Together” Diverse Models via SysML
Level 1: IntraIntra-Template Diversity
par [cbam] LinkagePlaneStressModel [Definition view]
L
B
s
ts1
ds1
shaft
rib2
sleeve1
sleeve2
B
soi: Linkage
ts2
red = idealized parameter
rib1
ds2
Leff
effectiveLength:
deformationModel:
LinkagePlaneStressAbb
sleeve1:
width:
Mechanical
CAD model
CAE model
(FEA)
l:
wallThickness:
ws1:
outerRadius:
ts1:
rs1:
sleeve2:
l
2
ws2:
width:
ts2:
wallThickness:
rs2:
outerRadius:
tf:
wf:
shaft:
tw:
ex:
criticalCrossSection:
uxMax:
nuxy:
basicIsection:
sxMax:
force:
flangeThickness:
flangeWidth:
webThickness:
condition: Condition
material:
reaction:
name:
mechanicalBehaviorModels:
description:
sxMosModel:
MarginOfSafetyModel
linearElastic:
youngsModulus:
determined:
allowable:
marginOfSafety:
poissonsRatio:
yieldStress:
Symbolic
math models
uxMosModel:
MarginOfSafetyModel
determined:
allowableInterAxisLengthChange:
allowable:
marginOfSafety:
[Peak et al. 2007—Part 2]
20
“Wiring Together” Diverse Models via SysML
Level 2: InterInter-Template Diversity (per MIM 0.1)
Naval Systems-of-Systems (SoS) Panorama—An Envisioned Complex Model Interoperability Problem Enabled by SysML/MIM/COBs
c2. Optimization Templates
a0. Descriptive
a0
Resources
d0. Simulation
d0
Building Blocks
ECAD & MCAD Tools
Tribon, CATIA, NX, Cadence, ...
c0. Context-Specific Models
c1 Simulation Templates
c1.
(of diverse behavior & fidelity)
2D
General Math
Mathematica,
Maple, Matlab,…
…
CFD
Flotherm Fluent,
Flotherm,
Fluent …
3D
…
Damaged
Stability
Classification Codes, Materials,
Personnel, Procedures, …
e0. Solver
e0
Resources
Evacuation Codes
Egress, Exodus, …
Operation Mgt. Systems
Libraries & Databases
Parametric associativity
Tool & native model associativity
Composition relationship (re-usage)
Evacuation
Mgt.
Propeller
Hydro
Hydrodynamics
Systems & Software Tools
DOORS, E+
MagicDraw,
Studio,
Eclipse, …
Legend
Based on HMX 0.1
2008-02-20
b0. Federated
Descriptive Models
Navigation
Accuracy
FEA
Abaqus, Ansys,
Patran, Nastran, …
Discrete Event
Arena, Quest, …
21
Technical Approach—Subset
pp
• Standards-based framework technology
– Federated system models
– Utilize SysML where appropriate (esp. parametrics)
• Modeling & simulation interoperability (MSI) method
– Harmonize, generalize, extend new & existing work
– COBs,, CPM,, KCM,, MACM,, MRA,, OOSEM,, ...
• Testbeds
–
–
–
–
Develop
p and test techniques
q
iterativelyy
Implement test cases for verification & validation
Produce reference examples
Produce open resources
(e.g., SysML-based fluid power libraries)
Page 22
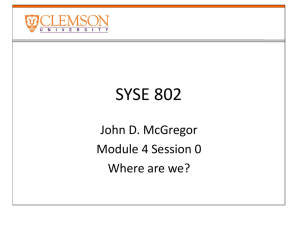
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
23
Excavator Modeling & Simulation Testbed
Interoperability Patterns View (MSI Panorama per MIM 0.1)
a0. Descriptive Resources
(Authoring Tools, ...)
NX
d0. Simulation Building Block
Libraries
Cost
Concepts
Optimization
Concepts
Reliability
Concepts
Solid
Mechanics
Queuing
Concepts
Fluid
Mechanics
c0. Context-Specific
Simulation Models
Optimization Model
Obj ti
Objective
Function
Notes
ModelCenter
Cost
Model
Excel
b0. Federated
b0
Descriptive Models
e0. Solver Resources
Reliability
M d l
Model
Excel
Dig Cycle
Model
Mathematica
Federated Excavator Model
Operations
p
MagicDraw
RSD/E+
Req. &
Objectives
Dig Site
Hydraulics
y
Subsystem
Boom
Linkages
Extensional
Linkage Model
Dump Trucks
Plane Stress
Linkage Model
Dymola
Legend
Ansys
Federated Factory Model
FactoryCAD
Req. &
Objectives
Excavator
MBOM
Assembly Lines
AGVs
Buffers
Work Cells
Machines
MM1 Queuing
Assy Model
Discrete Event
Assy Model
eM-Plant /
Factory Flow
2008-02-20
24
Demo Scenario
• New market-driven targets:
– 20% increase in dig rate (dirt volume / time)
– 15% increase in mfg. production
• Ch
Check
k if existing
i ti d
design
i iis sufficient
ffi i t b
by
re-running SysML-enabled simulations
• If not, explore re-design trade space
– Changes in bucket size, hydraulics, ...
• Re-do V&V using simulations on new design
• Explore manufacturing impact
– Factory re-design and simulation
25
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
26
Earth--Moving Enterprise
Earth
SysML package diagram (pkg)
27
Excavator Model Tree
Summary View (mostly unexpanded) in MagicDraw SysML Tool
28
Excavator Operational Domain
Top--Level Context Diagram in SysML
Top
29
Excavator Operational Domain
First Level of Detail—
Detail—bdd (SysML block definition diagram)
30
Excavator Operational Domain
First Level of Detail—
Detail—ibd (SysML internal block diagram)
31
Excavator Operational Domain
Top--Level Use Cases
Top
32
Excavator Dig Cycle
Activity Diagram
33
Excavator Requirements & Objectives
req - SysML Requirements Diagram
34
System Objective Function—
Function—Excavator
Context: Operational Enterprise
Mathematical
Form
n
f k i moei
i 1
n
k
ij
i , j 1;i , j
moei moe j
SysML Parametrics
Form
35
Excavator Test Case
Selected System Breakdowns
36
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
37
Hydraulic Circuit Diagram
Pressure--Compensated, LoadPressure
Load-Sensing Excavator
Excavator—
—ISO 1219 notation
Mechanical
Interface
Mechanical
Interface
Mechanical
Interface
Mechanical
Interface
LS
38
SysML Schematic (ibd) — Basic View
Pressure--Compensated, Load
Pressure
Load--Sensing Excavator
39
SysML Schematic (ibd) — Detailed View
Pressure--Compensated, Load
Pressure
Load--Sensing Excavator
40
Hydraulics Subsystem Simulation Model
bdd
41
Excavator Case Study
Native Tool Models: Modelica
c c...
c...
c
B B...
B...
B
Hydraulics Model
aArm1b
r={0.49...
b3 b
r={-.92...
a
r={2.85,1.18,... r={4.22,1.3...
cyl3f
b
a
.
b b2_l a
cyl2f b4x
b ..1
y
bB...
Boo...
Arm...
Buc...
2
l
BoomCyl...
BoomCyl...
ArmCylB...
ArmCylR... BucketC...
BucketC...
c...
Sw ingFl...
4 ,.
_
b 0
l1
{
a=
m=
m=...
y
c...
Boom
r
c
a
b
a Arm b
r={3.654,...
r={7.11,0,0}
n={...
n={...
n={...
Sw ingMotor
b2_r
b m
.
Bo...
Ar...
Bu...
..
a
b
A =
.. b ...
b
r={2.85,1....
r
,
l 5 e ,1
..
.
m
.
_ 5 g 4
.
.
1 6 ia 6
l1
b . rr 1
BoomCyl...
y
{ a .
a
.
c
BoomCylR
ArmCyl
BucketCyl
=
..
r Ca 0
sw ingComma...
{- bC...
r b .,5
lL
=
_ 5
aArm2 b
r m=...
y
B
1 6
r={2.97,0....
C
n_a={...
b
.
JointR...
m
B
B
B
bra
bra...
BoomCyl...
a{=
o
o
r
.
.
B
.., ..
Boo...
n
0
{i
=w
Mechanical model of complete...
n
...
S... brake
e .. S
s .{
_
boomCommand
a =
e
c...
c...
B r
m
ra
f
... 0
5
B =
b
r= m
{. p
5 1
2 0
..
.
Multi-Body System Dynamics Model
(linkages, ...)
armCommand
LS B
P
T
max
ma...
max1
ma...
LS B
P
LS B
T
P
T
LS B
P
T
LS B
P
a
c
c
u bucketCommand
m
u
la
to
r
constantSpeed
max2
ma...
max3
ma...
T
circuitTank
pclsPump
Dig Cycle
hydraulics
B
environment
y
world
p_amb = 101325
T_amb = 288.15
x
42
Simulation
in Dymola
y
Simulation
Results
Modelica
Lexical Representation
( t -generated
(auto(auto
t d from
f
SysML)
S ML)
[Johnson 2008 - Masters Thesis]
[Johnson,
43
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
44
Recurring Problem:
Maintaining Multiple Views
• Multiple
stakeholders
with different
views and tools
• Models of
different system
aspects
• Different views
are not
p
independent
Aspect
A
Models
System
Design
Model
Aspect
B
Models
45
Approach: Model Transformation
1. Define meta-models
2. Define a model transformation
–
–
–
Create graphs of correspondence between metamodels
Define transformation rules from SysML to Modelica
and vice-versa
Triple Graph Grammar (TGG)
3. Compile rules (MOFLON) and load as plug-in
S
Source
Metamodel
M t
d l
refers to
conforms to
Source Model
T
Transformation
f
ti S
Specification
ifi ti
refers to
executes
reads
Transformation Engine
(Czarnecki, K., & Hellen, S., 2006)
T
Target
t Metamodel
M t
d l
conforms to
writes
Target Model
46
Capturing Domain Specific Knowledge
in Graph
p Transformations*
Requirements &
Objectives
system
alternative
SysML
ibd [Block] Hydraulic_Subsystem[ Schematic ]
pump : FDpump
discharge : FlowPort
inputShaft : FlowPort
housing : FlowPort
pump-to-valve : Line
a : FlowPort
b : FlowPort
valve : 4port3wayServoValve
suction : FlowPort
portP : FlowPort
portT : FlowPort
tank-to-pump
p p : Line
Topology Generation*
a : FlowPort
cylB : FlowPort
b : FlowPort
cylA : FlowPort
tank : Tank
System
Alternatives
sump : FlowPort
MAsCoMs SysML
valve-to-cylP1 : Line
return : FlowPort
valve-to-filter : Line
filter-to-tank : Line
b : FlowPort
b : FlowPort
b : FlowPort
valve-to-cylP2 : Line
a : FlowPort
a : FlowPort
Model Composition*
a : FlowPort
a : FlowPort
filter : Filter
b : FlowPort
in : FlowPort
out : FlowPort
actuator : Double-ActingCylinder
System
y
Behavior
S ML
SysML
Models
Boom
b : FlowPort
rod : FlowPort
a : FlowPort
hydraulics
Arm
Bucket
behavior
model
Model Translation*
Executable
Simulations
Dig
Cycle
Traj
Sw ing
housing : FlowPort
y
simulation
configuration
world
x
Dymola
Simulation Configuration*
Configuration
Design
Optimization
ModelCenter
47
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
48
Wrap Dynamic Simulation as
ModelCenter Model in SysML
y
Fully qualified name points to
ModelCenter model
Stereotypes define
p
p causality
y
input/output
49
DOE Model in SysML
LatinHyperCube sampler
Reference
Property
Model
50
Automatic Export to
and Execution in ModelCenter
51
Application in Case Study:
Optimization
p
under uncertainty
y with kriging
g g model
optimizer
Latin Hypercube +
K i i response surface
Kriging
f
• Optimization under
uncertainty
• LatinHyperCube
sampler used to
predict expected
value
• Kriging model used
in conjunction with
p to g
generate
sampler
response surface to
reduce
computational cost
Objectives:
• Maximize Efficiency
• Minimize Cost
Design variables:
• bore diameters
52
SysML Model
Optimization under uncertainty with kriging model
53
Trade Study Optimization Results
Pl t Variable:
Plot
V i bl response (Model.utility.utility)
(M d l tilit tilit )
Design space
visualized in
ModelCenter
0.8386
0.74458
0.65057
0.55655
0.46254
0.36852
0.27451
0.18049
0.08648
-0.00754
0.82
0.8
0.78
0.76
0.74
0.72
0.7
0.68
0.66
0.64
0.62
0.6
0.58
0 56
0.56
0.54
0.52
0.5
0.48
utility
Auto-generated
optimization model in
ModelCenter
0.46
0.44
0.42
0.4
0.38
0.36
0.34
0.32
0.3
0.28
0.26
0.24
0.22
0.2
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
-3.95517e-016
0.105
0.106
0.107
0.108
0.109
0.11
0.111
0.112
0.113
boomSize
0.114
0.115
0.145
0.144
0.144
0.143
0.143
0.142
0.142
0.141
0.141
0.140.14
0.139
0.139
0.138
0.138
0.137
0.137
0.136
0.136
0.135
0 135
0.135
0 134
0.134
0.134
0.133
0.117
0.133
0.132
armSize
0.132
0.131
0.131
0.118
0.130.13
0.129
0.129
0.128
0.128
0.127
0.119
0.127
0.126
0.126
0.125
0.125
0.12
0.116
Design optimization
model in SysML with
auto-updated results
54
See Part 2 talk by Leon McGinnis ...
Model-Based SE Using SysML
Part 2: Integrating Mfg Design and Simulation
55
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
56
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
57
MCAD--SysML Interface Scenarios
MCAD
UGS/Siemens NX
RSD/E+
SysML Model
SysML Model Import
User SysML Model
Manipulation
L
B
s
t s1
t s2
red = ideali zed paramete r
rib1
ds1
shaft
rib2
sleeve1
sleeve2
B
d s2
Leff
par [cbam] LinkageExtensionalModel_800240 [Instance view: state 1.0 - unsolved]
soi: FlapLinkage_XYZ-510
deformationModel:
effectiveLength: in = 5.00
undeformedLength:
totalElongation:
shaft:
Simulation
Execution*
Model Changes
Propagate to CAD Tool
Parametrics
Execution
XaiTools COB Services
Georgia Tech XaiTools™
area:
criticalCrossSection:
length:
basic:
materialModel:
area:
in^2 = 1.125
normalStress:
youngsModulus:
totalStrain:
material: Steel1020HR
name:
= “1020 hot-rolled steel”
mechanicalBehaviorModels:
condition:
reaction:
lbs = 10000
description:
= “flaps mid position”
force:
linearElastic:
youngsModulus:
psi = 30e6
stressMosModel:
determined:
yieldStress:
psi = 18000
allowable:
marginOfSafety:
=?
Engineering
Analysis Models
* = work-in-process
58
MCAD Native Model and Tool UIs
UGS/Siemens NX
59
MCAD Model (Subset) in SysML
RSD/E+
60
Interfacing Spreadsheets
with SysML Parametrics
61
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
O
ti
l
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Production
Ramps
Excel
Dymola
Cost Model
Dig Cycle
Model
eM-Plant
Factory
Simulation
2008-02-25a
62
UAV System Design Problem: LittleEye
Network--Centric Warfare Context — SysML/DoDAF Model
Network
Source: No Magic Inc. and InterCAX LLC
63
Road Scanner System Problem
LittleEye UAV Squadron
64
LittleEye SysML Model
Various Diagram Views
65
Solving LittleEye SysML Parametrics
ParaMagic Browser Views
Next--generation objectNext
object-oriented spreadsheetspreadsheet-like capabilities.
Instance 1 - Before Solving
Instance 1 - After Solving
66
Enabling Executable SysML Parametrics
Commercialization by InterCAX LLC in Georgia Tech VentureLab incubator program
Advanced technology for graph management and solver access via web services.
Plugins Prototyped by GIT
(to SysML vendor tools)
1) Artisan Studio [2/06]
2) EmbeddedPlus [3/07]
3) NoMagic [12/07]
NextGeneration
Spreadsheet
Parametrics plugin
COB API
Execution via
API messages
or exchange files
COB Services (constraint graph manager, including COTS solver access via web services)
Composable Objects (COBs)
...
Native Tools Models
...
Ansys
(FEA Solver)
...
L
COTS =
commercial-off-the-shelf
(typically readily available)
FL
TL Mathematica
EA
(Math Solver)
XaiTools SysML
X
L Toolkit™
COB Solving
g & Browsing
g
XaiTools Frame
X
eWork™
SysML
y
Authoring
g Tools
Traditional COTS or
in-house solvers
67
Productionizing/Deploying GIT XaiTools™
Technology for Executing SysML Parametrics
www.InterCAX.com
Vendor
SysML
Tool
Prototype by
GIT
Product by
InterCAX LLC
Artisan
Studio
Yes
<tbd>
EmbeddedPlus
E+ SysML / RSA
Yes
<tbd>
No Magic
MagicDraw
Yes
ParaMagic™ 15.5
(Jul 21, 2008 release)
T l l i /IBM
Telelogic/IBM
Rh
Rhapsody/Tau
d /T
<tbd>
<tbd>
Sparx Systems
Enterprise Arch.
<tbd>
<tbd>
n/a
XMI import/export
Yes
<tbd>
Others <tbd>
Others <tbd>
<tbd>
<tbd>
[1] Full disclosure: InterCAX LLC is a spin-off company originally created to commercialize technology from RS Peak’s GIT group. GIT has licensed technology to
InterCAX and has an equity stake in the company. RS Peak is one of several business partners in InterCAX. Commercialization of the SysML/composable object
aspects has been fostered by the GIT VentureLab incubator program (www.venturelab.gatech.edu) via an InterCAX VentureLab project initiated October 2007.
68
Solver Access via XaiTools Web Services (XWS)
S1: General MultiMulti-Solver Setup
Client Machines
Server Machines
XaiTools Web Services
Rich Client
Servlet Container
HTTP/XML
Wrapped Data
SOAP Servers
XaiToolsAnsys
Ansys
XaiTools
XaiTools
Math.
XaiTools
SolverSolver
Server
Solver
SWrappers
Solver
l
Server
SServer
Interne
et/Intranett
FEA Solvers
Ansys, Patran,
Ansys
Patran
Abaqus, ...
Math Solvers
Engineering
S i B
Service
Bureau
...
SysML-based
COB models
Apache Tomcat
Web
erver
WebSServer
S
(e.g. ParaMagic)
SOAP
S
Internet
XaiTools
Cli
Client
Mathematica
athematica
69
Solver Access via XaiTools Web Services (XWS)
S2: ParaMagic
ParaMagic--Mathematica Setup (current product = XWS 2.2)
Client Machines
(End Users 1...n)
Server Machine @ Company X
XaiTools Web Services
Rich Client
Servlet Container
Interne
et/Intranett
MagicDraw
SysML Tool
Apache Tomcat
HTTP/XML
Wrapped Data
Web Server
S
SysML-based
COB models
SOAP
S
Internet
P M i
ParaMagic
SOAP Server
XaiTools Solver
Wrappers
Math Solver
Mathematica
Network Server
network increment(s)
...
70
Broadly Applicable Technology
Examples of Executable SysML Parametrics
• Road scanning system
using unmanned aerial vehicle (UAVs)
• Space systems orbit planning
• Energy systems
•
...
• Mechanical part design and analysis (FEA)
...
•
• Insurance claims processing
and website capacity model
• Financial model for small businesses
• Banking service levels model
•
...
71
Satellite Tutorial Highlights: SimpleSat
par [Block] Satellite[
definition ]
r1 : MassBalance
{m = m1 +m2 + m3 + m4}
e1
mass
m
m1
e10
m2
m3
m4
e2
e3
propulsionSubSys :
PropulsionSystem
e5
e4
instruments :
Instruments
controllerSubSys :
ControlSystem
powerSubSys :
PowerSystem
mass
mass
mass
mass
power
power
power
power
e6
e7
e9
e8
p2
p3
p
r2 : PowerBalance
{p
=
p1
+
p2
+
p3}
p1
reqVerifierMass :
MarginOfSafetyBlock
e12
allowable
mass
r3 : CtrlPwrEqn
{pwrctrl = 0.2 * mass}
pwrctrl
tl
mos
determined
e11
72
Financial Projections SysML Model
Various Diagram Views
73
Using a Spectrum of Modeling Technologies
• Spectrum
– Mental calculations
– Back-of-envelope hand calculations
– Spreadsheets
S
d h t
–
...
– SysML
S ML ((with
ith executable
t bl parametrics)
ti )
–
...
• Varying characteristics
– Quickness, flexibility, structure, modularity,
reusability, self-validation/constraints, ...
74
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge
g Team Objectives
j
• Technical Approach
– Techniques and Testbeds
• Deliverables & Outcomes
pp
• Collaboration Approach
Page 75
Deliverables & Outcomes
Phase 1 (Aug 2008)
• Solution and supporting models
– Excavator test case models
models, test suites
suites, …
• MBSE practices used
– Modeling & simulation interoperability (MSI) method, …
• Model interchange capabilities
– Tests between SysML tools, CAD/CAE tools, …
• MBSE metrics/value
– See “Benefits” slide with candidate metrics
• MBSE findings,
g , issues,, & recommendations
– Issue submissions to OMG and vendors, publications, …
• Training material
– Examples,
E
l
tutorials,
t t i l …
• Plan forward (Phase 2 and beyond)
Page 76
Primary Public Reporting Venues
• Call for Participation @ IS’07
– Jun 26,
26 2007 in San Diego
• Phase 1 Status Update @ IW’08 MBSE Workshop #2
– Jan 25, 2008 in Albuquerque
• Phase
Ph
1 Status
St t U
Update
d t @F
Frontiers
ti
W
Workshop
k h
– May 14, 2008 in Atlanta
• Phase 1 Status Update @ IS’08
– Jun 15-19, 2008 in Utrecht
• Phase 1 Final Report & Archive of Models
– Aug 2008 [proprietary deliverable]
– May 2009 (estimate) via website [public version]
• Phase 2 Status Updates @ IW’09, etc.
• Misc. reports/updates/publications @ various venues
– OMG meetings, NDIA, society & vendor conferences, ...
Page 77
Contents
• Phase 1 Overview and Results
– From August,
August 2007 to August
August, 2008
• Phase 2 Progress
– From August, 2008 to August, 2009
78
MBSE Challenge Team Objectives
Phase 2: 2008
2008-2009
2009
Overall Objectives
• Refine & extend beyond Phase 1 capabilities
for modeling & simulation interoperability (MSI)
• Phase 2 Scope [new aspects]
– Domains: Primary: Mechatronics (expanded excavator testbed)
y Others to demo reusabilityy
Secondary:
– Capabilities: Methodologies, tools, requirements,
and practical applications (MIM v2, ...)
– MSI subset: Connecting system specification & design models
with multiple engineering analysis
– Deployment: Productionizing techniques & tools
to enable ubiquitous practice
• Advance & demo how SysML facilitates effective MSI
Page 79
MBSE Challenge Team Objectives
Phase 2: 2008
2008-2009
2009
Specific Objectives
1. Extend modeling & simulation interoperability method: MIM 2.0
1. Generalizations:
Ge e a at o s g
graph
ap ttransformations,
a s o at o s, variable
a ab e topo
topology,
ogy, reusability,
eusab ty,
parametrics 2.x, trade study support, inconsistency mgt., E/MBOM
extensions, method workflow, ...
2. Specializations: software, closed-loop control, electronics, ...
3. Interfaces to new tools: Matlab/Simulink, ECAD, Arena, ...
2. Refine SysML and tool requirements to support MIM 2.0
1 Provide feedback to vendors and OMG SysML 1
1.
1.2/2.x
2/2 x task forces
3. Demonstrate extensions in updated testbed
4. Define deployment plan and initiate execution
5. Refine roadmap beyond Phase 2
Page 80
PhD Dissertation Defense
G.W.Woodruff School of Mechanical Engineering
Georgia Institute of Technology
Atlanta GA,
Atlanta,
GA USA
Nov 3, 2008 * MRDC 4211
Knowledge Composition Methodology for
Effective Analysis Problem Formulation in
Simulation-based Design
Manas Bajaj
j j
manas.bajaj@gatech.edu
Georgia Tech
Engineering Information Systems Lab
www.eislab.gatech.edu
Systems Realization Lab
www.srl.gatech.edu
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
Abstract
In simulation-based design, a key challenge is to formulate and solve analysis problems efficiently to evaluate a
large variety of design alternatives. The solution of analysis problems has benefited from advancements in commercial
off-the-shelf math solvers and computational capabilities. However, the formulation of analysis problems is often a
p
Traditional simulation templates
p
used for representing
p
g analysis
y pproblems are typically
yp
y
costlyy and laborious process.
brittle with respect to variations in artifact topology and the idealization decisions taken by analysts. These templates
often require manual updates and “re-wiring” of the analysis knowledge embodied in them. This makes the use of
traditional simulation templates ineffective for multi-disciplinary design and optimization problems.
Based on these issues, this dissertation defines a special class of problems known as variable topology multi-body
(VTMB) problems that characterizes the types of variations seen in design-analysis interoperability. This research thus
primarily answers the following question:
How can we improve the effectiveness of the analysis problem formulation process for VTMB problems?
The knowledge composition methodology (KCM) presented in this dissertation answers this question by addressing
the following research gaps: (1) the lack of formalization of the knowledge used by analysts in formulating simulation
templates, and (2) the inability to leverage this knowledge to define model composition methods for formulating
simulation templates
templates. KCM overcomes these gaps by providing: (1) formal representation of analysis knowledge as
modular, reusable, analyst-intelligible building blocks, (2) graph transformation-based methods to automatically
compose simulation templates from these building blocks based on analyst idealization decisions, and (3) meta-models
for representing advanced simulation templates—VTMB design models, analysis models, and the idealization
relationships between them.
Applications of the KCM to thermo-mechanical analysis of multi-stratum printed wiring boards and multicomponent chip
hi packages
k
demonstrate
d
its
i effectiveness—handling
ff i
h dli VTMB andd idealization
id li i variations,
i i
andd enhanced
h
d
computational efficiency (from several hours in existing methods to few minutes). In addition to enhancing the
effectiveness of analysis problem formulation, the KCM is envisioned to provide a foundational approach to model
formulation for generalized variable topology problems.
M i sponsor: NIST (Ray,
Main
(R
S
Sriram,
i
F
Fenves, B
Brady,
d ett al.)
l)
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
82
Research Contributions (Bajaj, 2008)
Effective Formulation of Complex Simulation Templates
Primary Capabilities
Variations in system design topology
Variations in idealization intent
Efficiency
– 90%+ faster
– Reusable analysis building blocks (ABBs)
– Automated composition from building blocks
» Formal approach based on graph transformations
– Meta-models
Meta models for design and behavior model abstractions
– Libraries of ABBs, transformation patterns, and rules
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
83
SysML Parametrics
Flattened Graphs
p
[3]
[1]
[4]
[2]
84
Examples
SysML Parametrics Flattened Graphs
1. Spring systems (with animation)
2 Road scanning ssystem
2.
stem
using LittleEye UAVs
3. Flap linkage mechanical design
4. Multi-year business financial model
For further information on these examples, see backup slide below entitled
“SysML
SysML Parametrics—
Parametrics—Suggested Starting Points
Points” for these references:
- Examples 1 and 3: Peak et al. 2007 (IS07 Parts 1 and 2)
- Examples 2 and 4: Zwemer and Bajaj 2008 (Frontiers Workshop)
85
SysML Parametrics Graph Visualization
[in collaboration with InterCAX—
InterCAX—A. Scott Fall 2008 internship]
• Flattened graph [aka COB constraint graph]
– Flattened graph graph among value types
– Block encapsulation not shown
• Purpose
p
– Alternative way to understand / interact with a given model
• Primitive connections/relationships, structure, complexity, ...
– Enables visual/intuitive model comparisons
– Possible additional SysML view of models
• Status
Stat s
– Prototype plugin that leverages ygraph toolkit
– Auto-generates
Auto generates flattened graph from MagicDraw
– Construction animation and static final view
86
SysML and Mobile Robotic Systems:
A Research Testbed and Educational Platform
Status Update: 20092009-FebFeb-17
Georgia Tech Modeling & Simulation Lab – www.msl.gatech.edu
Russell Peak (PI)
(PI), Bennett Wilson,
Wilson Brian Aikens
Aikens, Michael Qin
• Background & Objectives
• Operational Control Using SysML Activities
– Demonstration
• Status & Next Steps
87
Institute for Personal Robots in Education
(IPRE) — http://www.roboteducation.org/
88
Background
• Leveraging Institute for Personal Robots in
Education (IPRE) — http://www.roboteducation.org/
– Multi-university/corporation educational environment
– Ex. Used in intro comp sci course @ GIT (CS1301)
• Key elements
– Mobile robots: IPRE Scribbler, Roomba, SRV-1
• Sensors, cameras, Bluetooth, firmware, PCB ECAD, ...
– Mobile robotics s/w platform: Myro (Python)
• Primitive operations ... image processing, intro ~AI, ...
– Domain context
• Multi-unit systems, command & control, reusability, ...
• Low
Low-cost
cost and open (non-proprietary)
(non proprietary)
89
Objectives—
Objectives
—Big Picture
• Research & demonstration testbed
• Achieve Phase 2 objectives (INCOSE MBSE MSI Team)
– System run-time operation aided by SysML
– Embedded software / firmware
• Hardware-software relations, real-time factors, ...
– Executable SysML across multiple constructs
• Activities, parametrics, state machines ...
– Misc: instance levels, versioning/config mgt.
• SysML education platform
– Usage in hands-on courses
(industry short courses, university courses, ...)
– Model it and run it!
90
SysML and Mobile Robotic Systems:
A Research Testbed and Educational Platform
Status Update: 20092009-FebFeb-17
Georgia Tech Modeling & Simulation Lab – www.msl.gatech.edu
Russell Peak (PI)
(PI), Bennett Wilson,
Wilson Brian Aikens
Aikens, Michael Qin
• Background & Objectives
• Operational Control Using SysML Activities
– Demonstration
• Status & Next Steps
91
Scribbler / Myro Demo
from myro import *
initialize("com29")
Executable SysML Activity Model [1 - original]
Resulting python script
forward(1, 1)
turnRight(1 .4)
turnRight(1,
4)
forward(1, 1)
turnRight(1, .4)
forward(1, 1)
turnRight(1, .4)
forward(1,
( , 1))
stop()
92
Scribbler / Myro Demo
from myro import *
initialize("com29")
Executable SysML Activity Model [2 - after live update]
Resulting python script
senses()
beep(1 440)
beep(1,
forward(1, 1)
turnRight(1, .4)
forward(1, 1)
beep(1, 440)
turnRight(1,
g ( , .4))
forward(1, 1)
turnRight(1, .4)
forward(1, 1)
stop()
93
Representative Broader Usage (Sanitized)
Excursion 456 on Moon: Rover - Unmanned
Mission: Pick up 10 kg of rocks at two specified locations
WP 5
Stop
Report all data
Report all data
WP 1
Time: 000 minutes
Task 1: Travel WP 1 to WP 2
Power = 500 units
Power Rate: 1 unit per minute
(traveling and at stops)
Rover Weight = 100 kg
Rover Weight = 100 kg
Report all dataattributes Heading: 120 degrees for
Time: 30 minutes WP 4
Stop at Target Task X: Pick up rocks
10 kilos
10 minutes
Report all data attributes
Task X WP 4 to WP 5
H di
Heading: 200 degrees
200 d
Time: 50 minutes
WP 3
Task 4: WP 3 to WP 4
Report all data attributes
Heading: 300 degrees
Time: 40 minutes
WP 2
Stop at Target
Task 2: Pick up rocks 10 kil
‐ 10 kilos
‐ 10 minutes
Task 3: WP 2 to WP 3
Heading: 060 degrees
Time: 60 minutes
Report All Data attributes
Report All Data attributes 94
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge
g Team Objectives
j
• Technical Approach
– Techniques and Testbeds
• Deliverables & Outcomes
pp
• Summaryy & Collaboration Approach
Page 95
SE Practices for Describing Systems
Now / Future
Past / Now
•
•
•
•
•
Specifications
Interface requirements
System design
Analysis & trade-off
Test plans
Moving from Document-centric to Model-centric
Revision by GIT; Original Source: OMG SysML Tutorial (June 2008). Reprinted with permission. Copyright © 2006-2008 by Object Management Group.
96
What you can do with a SysML model ...
Describe requirements, system structure, & allocations
Generate and/or link to simulations & verify requirements
Support system trade studies
Link to domain models & analyses: S/W, M/ECAD, ...
I e do the Vee and more ... (e.g.,
I.e.,
(e g support system operation)
Requirements
Definition;
System Concepts
Systems
Design
Systems
Integration
Validate
to User
Requirements
ion
s it
po
m
co tion
De fini
De
Sys. Integration;
Sys. Verification
System Spec.;
Verification Plan
Allocate Specs;
Allocate Verification
In
Ve tegr
rif atio
i ca n
tio an
n
d
•
•
•
•
•
Assemble Subsys;
Subsys. Verification
an
d
Design Engineering
Time
"Vee" model by Forsberg and Mooz, 1992
97
Modeling & Simulation Interoperability for MBSE
Primary Impacts
Enabling Capabilities
Increased Knowledge
Capture & Completeness
Increased
Modularityy & Reusabilityy
Increased
Traceability
Reduced
Manual Re-Creation
Increased
Automation
Reduced
Modeling Effort
Increased
Analysis Intensity
R
Reduced
Time
T
Reduced
R
Cost
C
Reduced
R
Risk
R
In
ncreased
Understandin
U
ng
In
ncreased
Corporate Me
C
emory
In
ncreased Artifact
Performance
P
Benefits of SysML
SysML--based Approach
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
Precision Knowledge
for the
Model--Based Enterprise
Model
p
■
■
98
MBSE Challenge
Model Interoperability Team
Open “Call for Participation”
• Systems engineering drivers in commercial settings
– Increased system complexity
– Cross
Cross-disciplinary
disciplinary communication/coordination
• Enhancement possibilities based on interest
– Sponsoring other demonstrations and testbeds
– Developing shared models and libraries
– etc.
• Primary contacts
– Russell Peak [Russell.Peak @ gatech.edu]
– Sandy Friedenthal [sanford.friedenthal @ lmco.com]
– Roger
R
Burkhart
B kh t [B
[BurkhartRogerM
kh tR
M @ JohnDeere.com]
J h D
]
Page 99
Additional Resources
SysML Parametrics
Parametrics—
—Suggested Starting Points
Introductory Papers/Tutorials
•
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 1: A Parametrics
Primer. INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction to SysML parametrics.]
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
•
Peak RS,
RS Burkhart RM
RM, Friedenthal SA
SA, Wilson MW
MW, Bajaj M
M, Kim I (2007) Simulation-Based
Simulation Based Design Using SysML—Part
SysML Part 2: Celebrating
Diversity by Example. INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction on using SysML for modeling & simulation,
including the MRA method for creating parametric simulation templates that are connected to design models.]
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
Example Applications
•
Peak RS,
RS Burkhart RM
RM, Friedenthal SA
SA, Paredis CJJ,
CJJ McGinnis LF (2008) Integrating Design with Simulation & Analysis Using SysML
SysML—
Mechatronics/Interoperability Team Status Report. Presentation to INCOSE MBSE Challenge Team, Utrecht, Holland.
[Overviews modeling & simulation interoperability (MSI) methodology progress in the context of an excavator testbed.]
http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
•
Peak RS (2007) Leveraging Templates & Processes with SysML. Invited Presentation. Developing a Design/Simulation Framework: A
Workshop with CPDA's Design and Simulation Council, Atlanta. [Includes applications to automotive steering wheel systems and FEA
simulation templates
templates.]] http://eislab.gatech.edu/pubs/conferences/2007
http://eislab gatech edu/pubs/conferences/2007-cpda-dsfw-peak/
cpda dsfw peak/
Commercial Tools and Other Examples/Tutorials
•
ParaMagic™ plugin for MagicDraw®. Developed by InterCAX LLC (a Georgia Tech spin-off) [1]. Available at www.MagicDraw.com.
•
Zwemer DA and Bajaj M (2008) SysML Parametrics and Progress Towards Multi-Solvers and Next-Generation Object-Oriented
Spreadsheets. Frontiers in Design & Simulation Workshop, Georgia Tech PSLM Center, Atlanta. [Highlights techniques for executing SysML
parametrics
t i based
b
d on th
the ParaMagic™
P M i ™ plugin
l i for
f MagicDraw®.
M i D
® Includes
I l d UAV and
d fifinancial
i l systems
t
examples.]
l ]
http://www.pslm.gatech.edu/events/frontiers/
See slides below for additional references and resources.
[1] Full disclosure: InterCAX LLC is a spin-off company originally created to commercialize technology from RS Peak’s GIT group. GIT has licensed technology to
InterCAX and has an equity stake in the company. RS Peak is one of several business partners in InterCAX. Commercialization of the SysML/composable object
aspects is being fostered by the GIT VentureLab incubator program (www.venturelab.gatech.edu) via an InterCAX VentureLab project initiated October 2007.
101
MBX/SysML--Related Efforts at Georgia Tech
MBX/SysML
• SysML Focus Area web page
– http://www.pslm.gatech.edu/topics/sysml/
– Includes links to publications, applications,
projects, examples, courses, commercialization, etc.
– Frontiers 2008 workshop on MBSE/MBX, SysML, ...
• Selected projects
–
–
–
–
–
Deere: System dynamics (fluid power, ...)
Lockheed: System design & analysis integration
NASA Enabling technolog
NASA:
technology (S
(SysML,
sML ...))
NIST: Design-analysis interoperability (DAI)
TRW Automotive: DAI/FEA (steering wheel systems ... )
102
Selected GIT MBX/SysMLMBX/SysML-Related Publications
Some references are available online at http://www.pslm.gatech.edu/topics/sysml/
http://www.pslm.gatech.edu/topics/sysml/.. See additional slides for selected abstracts.
• Peak RS, Burkhart RM, Friedenthal SA, Paredis CJJ, McGinnis LF (2008) Integrating Design with Simulation & Analysis Using SysML—Mechatronics/Interoperability
Team Status Report. Presentation to INCOSE MBSE Challenge Team, Utrecht, Holland. [Overviews modeling & simulation interoperability (MSI) methodology
progress in the context of an excavator testbed.] http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
• McGinnis, Leon F., "IC Factory Design: The Next Generation," e-Manufacturing Symposium, Taipei, Taiwan, June 13, 2007. [Presents the concept of model-based
fab design, and how SysML can enable integrated simulation.]
• Kwon,
Kwon Ky Sang
Sang, and Leon F.
F McGinnis,
McGinnis "SysML
SysML-based
based Simulation Framework for Semiconductor Manufacturing
Manufacturing," IEEE CASE Conference
Conference, Scottsdale,
Scottsdale AZ
AZ,
September 22-25, 2007. [Presents some technical details on the use of SysML to create formal generic models (user libraries) of fab structure, and how these formal
models can be combined with currently available data sources to automatically generate simulation models.]
• Huang, Edward, Ramamurthy, Randeep, and Leon F. McGinnis, "System and Simulation Modeling Using SysML," 2007 Winter Simulation Conference, Washington,
DC. [Presents some technical details on the use of SysML to create formal generic models (user libraries) of fab structure, and how these formal models can be
combined with currently available data sources to automatically generate simulation models.]
• McGinnis, Leon F., Edward Huang, Ky Sang Kwon, Randeep Ramamurthy, Kan Wu, "Real CAD for Facilities," 2007 IERC, Nashville, TN. [Presents concept of using
FactoryCAD as a layout authoring tool and integrating it, via SysML with eM-Plant for automated fab simulation model generation.]
• T.A. Johnson, J.M. Jobe, C.J.J. Paredis, and R. Burkhart "Modeling Continuous System Dynamics in SysML," in Proceedings of the 2007 ASME International
Mechanical Engineering Congress and Exposition, paper no. IMECE2007-42754, Seattle, WA, November 11-15, 2007. [Describes how continuous dynamics models
can be represented in SysML. The approach is based on the continuous dynamics language Modelica.]
• T.A. Johnson, C.J.J. Paredis, and R. Burkhart "Integrating Models and Simulations of Continuous Dynamics into SysML," in Proceedings of the 6th International
Modelica Conference,
Conference March 3-4
3 4, 2008
2008. [Describes how continuous dynamics models and simulations can be used in the context of engineering systems design
within SysML. The design of a car suspension modeled as a mass-spring-damper system is used as an illustration.]
• C.J.J. Paredis "Research in Systems Design: Designing the Design Process," IDETC/CIE 2007, Computers and Information in Engineering Conference -- Workshop
on Model-Based Systems Development, Las Vegas, NV, September 4, 2007. [Presents relationship between SysML and the multi-aspect component model method.]
• Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 1: A Parametrics Primer. INCOSE Intl.
Symposium, San Diego. [Provides tutorial-like introduction to SysML parametrics.]
• Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 2: Celebrating Diversity by Example.
INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction on using SysML for modeling & simulation, including the MRA method for creating parametric
simulation templates that are connected to design models.]
• Peak RS (2007) Leveraging Templates & Processes with SysML. Invited Presentation. Developing a Design/Simulation Framework: A Workshop with CPDA's Design
and Simulation Council, Atlanta. [Includes applications to automotive steering wheel systems and FEA simulation templates.]
http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
• Bajaj M, Peak RS, Paredis CJJ (2007) Knowledge Composition for Efficient Analysis Problem Formulation, Part 1: Motivation and Requirements. DETC2007-35049,
DETC2007 35049,
Proc ASME CIE Intl Conf, Las Vegas. [Introduces the knowledge composition method (KCM), which addresses design-simulation integration for variable topology
problems.]
• Bajaj M, Peak RS, Paredis CJJ (2007) Knowledge Composition for Efficient Analysis Problem Formulation, Part 2: Approach and Analysis Meta-Model. DETC200735050, Proc ASME CIE Intl Conf, Las Vegas. [Elaborates on the KCM approach, including work towards next-generation analysis/simulation building blocks
(ABBs/SBBs).]
103
Integrating Design with Simulation & Analysis Using SysML—
SysML—
Mechatronics/Interoperability Team Status Report
Abstract
This presentation overviews work-in-progress experiences and lessons learned from an excavator testbed that
interconnects simulation models with associated diverse system models, design models, and manufacturing models. The
goall iis tto enable
bl advanced
d
d model-based
d lb
d systems
t
engineering
i
i (MBSE) iin particular
ti l and
d model-based
d lb
d X1 (MBX) iin
general. Our method employs SysML as the primary technology to achieve multi-level multi-fidelity interoperability, while
at the same time leveraging conventional modeling & simulation tools including mechanical CAD, factory CAD,
spreadsheets, math solvers, finite element analysis (FEA), discrete event solvers, and optimization tools. This work is
currently sponsored by several organizations (including Deere and Lockheed) and is part of the Mechatronics &
Interoperability Team in the INCOSE MBSE Challenge
Challenge.
Citation
Peak RS, Burkhart RM, Friedenthal SA, Paredis CJJ, McGinnis LF (2008) Integrating Design with Simulation & Analysis
Using SysML—Mechatronics/Interoperability Team Status Report. Presentation to INCOSE MBSE Challenge Team,
Utrecht,, Holland. http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
p
g
p
p
[1] The X in MBX includes engineering (MBE), manufacturing (MBM), and potentially other scopes and contexts such as
model-based enterprises (MBE).
104
Simulation--Based Design Using SysML
Simulation
Part 1: A Parametrics Primer
Part 2: Celebrating Diversity by Example
OMG SysML™ is a modeling language for specifying, analyzing, designing,
and verifying complex systems. It is a general-purpose graphical modeling
language with computer-sensible semantics. This Part 1 paper and its Part
2 companion show how SysML supports simulation-based design (SBD) via
tutorial-like examples. Our target audience is end users wanting to learn
about SysML parametrics in general and its applications to engineering
design and analysis in particular. We include background on the
development of SysML parametrics that may also be useful for other
stakeholders (e.g, vendors and researchers).
In Part 1 we walk through models of simple objects that progressively
i t d
introduce
S
SysML
ML parametrics
t i concepts.
t T
To enhance
h
understanding
d t di b
by
comparison and contrast, we present corresponding models based on
composable objects (COBs). The COB knowledge representation has
provided a conceptual foundation for SysML parametrics, including
executability and validation. We end with sample analysis building blocks
(ABBs) from mechanics of materials showing how SysML captures
engineering knowledge in a reusable form.
form Part 2 employs these ABBs in a
high diversity mechanical example that integrates computer-aided design
and engineering analysis (CAD/CAE).
The object and constraint graph concepts embodied in SysML
parametrics and COBs provide modular analysis capabilities based on
multi-directional constraints. These concepts and capabilities provide a
semantically
y rich wayy to organize
g
and reuse the complex
p
relations and
properties that characterize SBD models. Representing relations as noncausal constraints, which generally accept any valid combination of inputs
and outputs, enhances modeling flexibility and expressiveness. We
envision SysML becoming a unifying representation of domain-specific
engineering analysis models that include fine-grain associativity with other
domain- and system-level models, ultimately providing fundamental
capabilities
biliti ffor next-generation
t
ti systems
t
lifecycle
lif
l management.
t
These two companion papers present foundational principles of
parametrics in OMG SysML™ and their application to simulation-based
design. Parametrics capabilities have been included in SysML to support
integrating engineering analysis with system requirements, behavior, and
structure models. This Part 2 paper walks through SysML models for a
benchmark tutorial on analysis templates utilizing an airframe system
component called a flap linkage. This example highlights how engineering
analysis models, such as stress models, are captured in SysML, and then
executed by external tools including math solvers and finite element
analysis solvers.
W summarize
We
i the
th multi-representation
lti
t ti architecture
hit t
(MRA) method
th d and
d
how its simulation knowledge patterns support computing environments
having a diversity of analysis fidelities, physical behaviors, solution
methods, and CAD/CAE tools. SysML and composable object (COB)
techniques described in Part 1 together provide the MRA with graphical
modeling languages, executable parametrics, and reusable, modular, multidirectional capabilities.
capabilities
We also demonstrate additional SysML modeling concepts, including
packages, building block libraries, and requirements-verification-simulation
interrelationships. Results indicate that SysML offers significant promise as
a unifying language for a variety of models-from top-level system models to
discipline-specific leaf-level models.
Citation
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I
(2007) Simulation-Based Design Using SysML. INCOSE Intl. Symposium,
San Diego.
Part 1: A Parametrics Primer
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
Part 2: Celebrating Diversity by Example
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
105
Composable Objects (COB) Requirements & Objectives
Abstract
This document formulates a vision for advanced collaborative engineering environments (CEEs) to aid in the design,
simulation and configuration management of complex engineering systems. Based on inputs from experienced Systems
E i
Engineers
and
d technologists
t h l i t from
f
various
i
i d t i and
industries
d governmentt agencies,
i
it id
identifies
tifi th
the currentt major
j challenges
h ll
and pain points of Collaborative Engineering. Each of these challenges and pain points are mapped into desired
capabilities of an envisioned CEE System that will address them.
Next, we present a CEE methodology that embodies these capabilities. We overview work done to date by GIT on the
composable object (COB) knowledge representation as a basis for next-generation CEE systems. This methodology
leverages the multi
multi-representation
representation architecture (MRA) for simulation templates
templates, the user
user-oriented
oriented SysML standard for
system modeling, and standards like STEP AP233 (ISO 10303-233) for enhanced interoperability. Finally, we present
COB representation requirements in the context of this CEE methodology. In this current project and subsequent phases
we are striving to fulfill these requirements as we develop next-generation COB capabilities.
Citation
DR Tamburini, RS Peak, CJ Paredis, et al. (2005) Composable Objects (COB) Requirements & Objectives v1.0.
Technical Report, Georgia Tech, Atlanta. http://eislab.gatech.edu/projects/nasa-ngcobs/
Associated Project
The Composable Object (COB) Knowledge Representation: Enabling Advanced Collaborative Engineering Environments
(CEEs). http://eislab.gatech.edu/projects/nasa-ngcobs/
106
Leveraging Simulation Templates & Processes with SysML
Applications to CADCAD-FEA Interoperability
Abstract
SysML holds the promise of leveraging generic templates and processes across design and simulation. Russell Peak
joins us to give an update on the latest efforts at Georgia Tech to apply this approach in various domains, including
specific
ifi examples
l with
ith a ttop-tier
ti automotive
t
ti supplier.
li L
Learn h
how you ttoo may jjoin
i thi
this project
j t and
d iimplement
l
t a similar
i il
effort within your own company to enhance modularity and reusability through a unified method that links diverse models.
Russell will also highlight SysML’s parametrics capabilities and usage for physics-based analysis, including integrated
CAD-CAE and simulation-based requirements verification. Go to www.omgsysml.org for background on SysML—a
graphical modeling language based on UML2 for specifying, designing, analyzing, and verifying complex systems.
S
Speaker
k Biosketch
Bi k h
Russell S. Peak focuses on knowledge representations that enable complex system interoperability and simulation
automation. He originated composable objects (COBs), the multi-representation architecture (MRA) for CAD-CAE
interoperability, and context-based analysis models (CBAMs)—a simulation template knowledge pattern that explicitly
captures
p
design-analysis
g
y associativity.
y This work has p
provided the conceptual
p
foundation for SysML
y
p
parametrics and its
validation.
He teaches this and related material, and is principal investigator on numerous research projects with sponsors
including Boeing, DoD, IBM, NASA, NIST, Rockwell Collins, Shinko Electric, and TRW Automotive. Dr. Peak joined the
GIT research faculty in 1996 to create and lead a design-analysis interoperability thrust area. Prior experience includes
business phone design at Bell Laboratories and design-analysis integration exploration as a Visiting Researcher at
Hitachi in Japan.
Citation
RS Peak (2007) Leveraging Simulation Templates & Processes with SysML: Applications to CAD-FEA Interoperability.
Developing a Design/Simulation Framework, CPDA Workshop, Atlanta.
http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
107