Investigating ESD sensitivity in electrostatic SiGe MEMS - Lirias
advertisement

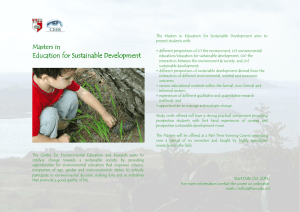
IOP PUBLISHING JOURNAL OF MICROMECHANICS AND MICROENGINEERING doi:10.1088/0960-1317/20/5/055005 J. Micromech. Microeng. 20 (2010) 055005 (9pp) Investigating ESD sensitivity in electrostatic SiGe MEMS Sandeep Sangameswaran1,2 , Jeroen De Coster1 , Dimitri Linten1 , Mirko Scholz1,3 , Steven Thijs1,2 , Guido Groeseneken1,2 and Ingrid De Wolf1,4 1 2 3 4 IMEC vzw, Kapeldreef 75, 3001 Heverlee, Belgium Department of Electrical Engineering (ESAT), KU Leuven, Belgium Department of Electrical Engineering, Vrije Universiteit, Brussels, Belgium Department of Metallurgy and Applied Materials (MTM), KU Leuven, Belgium E-mail: sangames@imec.be Received 14 December 2009, in final form 1 February 2010 Published 23 March 2010 Online at stacks.iop.org/JMM/20/055005 Abstract The sensitivity of electrostatically actuated SiGe microelectromechanical systems to electrostatic discharge events has been investigated in this paper. Torsional micromirrors and RF microelectromechanical systems (MEMS) actuators have been used as two case studies to perform this study. On-wafer electrostatic discharge (ESD) measurement methods, such as the human body model (HBM) and machine model (MM), are discussed. The impact of HBM ESD zap tests on the functionality and behavior of MEMS is explained and the ESD failure levels of MEMS have been verified by failure analysis. It is demonstrated that electrostatic MEMS devices have a high sensitivity to ESD and that it is essential to protect them. (Some figures in this article are in colour only in the electronic version) MEMS reliability has been widely studied and reported in recent years. A good description of the major failure mechanisms in MEMS can be found from the literature [2]. While ESD has for long been known as a big reliability threat to CMOS technology, and ESD protection for ICs is well established [3], ESD effects on MEMS have received comparatively little attention. A number of the commercially available MEMS such as the Analog Devices accelerometer or the Texas Instruments DMD micromirror arrays use CMOS drivers for the MEMS. Thus, the present protection strategy is to use the ESD protection from CMOS technology, also for the MEMS. In this context, it would be very useful to investigate the ESD sensitivity of MEMS and understand their failure mechanisms. This in turn would help in designing more ‘ESD-robust’ MEMS and also better ESD protection, thus helping to cross the reliability hurdle on the path toward commercialization. Very little is known about the ESD failure levels in MEMS devices and almost nothing is available in the literature about ESD protection of stand-alone MEMS. ESD as a new failure mode in MEMS devices was first reported in 2000 by Walraven et al [4]. Pioneering studies on the ESD 1. Introduction This paper addresses the impact of electrostatic discharge (ESD) on microelectromechanical systems (MEMS). ESD is the sudden transfer of electrical charge between two objects at different electric potentials. The human body or other conductive objects can become electrostatically charged if not properly grounded. If this charge comes in contact with, or passes near an ESD-sensitive (ESDS) device, ESD damage can occur. This type of ESD event can be simulated by the well-known human body model (HBM) and the machine model (MM) [1]. In addition, grounding a device that has become charged in an external electrostatic field can cause high discharge currents of up to a few Amperes to flow with a rise time of picoseconds. This type of ESD stress causes severe damage and can be simulated by the charged device model (CDM). Very small charges accumulated on conductive elements of a device can exceed the breakdown potential of the insulating layers or the air gaps between them, causing the device to destroy itself. Thus, it is very important to study the effect of ESD when designing for the reliability of any microelectronic device or system. 0960-1317/10/055005+09$30.00 1 © 2010 IOP Publishing Ltd Printed in the UK & the USA J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al (a) (b) Figure 1. Schematic cross-section of the micromirror when not actuated (a) and when actuated between the mirror and the left bottom electrode (b). • individual 8 μm × 8 μm mirrors with 300 nm thickness; • 5 × 5 array of 8 μm × 8 μm mirrors with 300 nm thickness; • 100 × 100 array of 16 μm × 16 μm mirrors with 300 nm thickness. effects on RF MEMS ohmic and capacitive switches have been carried out by Tazzoli et al [5] whereas Ruan et al also report the behavior of capacitive RF MEMS switches under ESD stress based on the HBM and the transmission line pulsing (TLP) method [6]. Detailed studies on ESD sensitivity in SiGe torsional micromirrors have been reported for the first time in the literature as a forerunner of the present work [7]. Accordingly, the aim of this work is to investigate the intrinsic ESD sensitivity of electrostatically actuated SiGe MEMS devices and to understand what factors affect their sensitivity in any particular manner. Considering that electrostatic actuation is one of the most preferred operating mechanisms for MEMS devices in general, the two case studies on unprotected MEMS devices discussed in this paper represent a much wider class of MEMS devices. The first case study is based on electrostatically actuated torsional micromirrors and the second case study on capacitive radio frequency (RF) MEMS switches. During normal operation, the mirrors are actuated by a square wave pulse which, when ramped up, increases the dynamic tilt angle (α) of the micromirror. In terms of functionality, a good micromirror would tilt by an angle of 5 mrad for an actuation pulse of 12 V. For functionality test measurements, the mirror is actuated by a triangular ramp to plot the dynamic tilt angle versus actuation voltage. A laser Doppler scanning vibrometer (LDV) which can measure outof-plane displacements optically was used for this purpose and the measurement [9] is shown in figure 2. Scan points defined on each individual mirror give information about the individual tilt angles of each mirror in the case of an array. For the array test structures used in the measurements, all the mirrors are connected in parallel so that they can be actuated all at once from a single pair of bond pads. The behavior of the torsional micromirror is explained very well by Zhao et al [10]. Figure 2 shows the tilt angle versus actuation voltage measurements done for a 5 × 5 array of 8 μm × 8 μm mirrors with a dc voltage sweep from −13 V to 14 V. The tilt angles of all the mirrors in the array are plotted on top of each other. Figure 2 also shows a micrograph of the mirror array with the measured maximum tilt angle given on the layout of each mirror. The mean tilt angle of the array at the maximum actuation voltage is about 5.3 mrad. Since there is no electrical contact between the mirror and the bottom electrode during normal operation, the device behaves electrically like an open circuit. The leakage current is a few tens of pA for a 1 V dc bias. 2. Description of the devices 2.1. Case study 1—electrostatically actuated torsional SiGe micromirrors Electrostatically actuated polycrystalline silicon germanium (poly-SiGe) torsional square micromirrors which are fabricated on a silicon substrate have been used as a test vehicle to study ESD effects on MEMS devices. SiGe has been previously shown to be a very good material to fabricate reliable and stable micromirrors [8]. A schematic diagram illustrating the operation of the micromirror with and without the actuation voltage is shown in figure 1. The mirror has two poly-SiGe bottom electrodes, one on either side of the torsional axis of the mirror whereas the mirror itself is the third electrode. When electrostatically actuated, the micromirror tilts on its axis and the dynamic tilt angle α is a function of the magnitude of the actuation potential applied between the SiGe bottom electrode and the mirror. Depending on which electrode is actuated, the mirror can tilt on either side like a seesaw. The gap between the bottom electrode and the mirror, when the mirror is flat, is approximately 300 nm. The devices used for this case study fall in one of the following three types: 2.2. Case study 2—electrostatically actuated capacitive radio frequency (RF) MEMS switches As a second case study, ESD tests have been performed on RF MEMS capacitive test structures which consist of aluminum bridges fabricated on a highly resistive silicon substrate. A simple cross-sectional schematic of a test structure is shown in figure 3(a). On the bottom electrode, there is a 200 nm 2 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al Figure 2. Tilt angle measurements (in mrad) of the micromirrors as a function of electrostatic actuation with a triangular wave. (b) (a) (c) Figure 3. Schematic of the device used for the test: (a) cross-section, (b) micrograph and (c) C-V characteristic. thick AlN dielectric layer. The bridges are 1 μm thick with an air gap of 3 μm between the bridge and the AlN dielectric. Figure 3(b) shows a micrograph of the RF MEMS actuator in the upstate. The functionality of the RF actuators can be characterized by the capacitance versus actuation voltage (C-V) plot. One such characteristic is shown in figure 3(c). The CV and operating principle of these test structures have been previously described in great detail [11]. Alternately, by using the LDV as in the case of the micromirrors, the actuators can be characterized by measuring their out-of-plane displacement versus the actuation voltage. The latter approach is used in this paper. The typical pull-in voltages are around 10 V, depending on the length and width of the actuator. Devices with various dimensions have been used for the work presented in this paper [12]. MEMS (micromirror or switch) and checking if the devices used for ESD testing satisfy these criteria is the first part. Performing ESD tests well within the framework of the accepted test standards [1] and examining the damage caused due to ESD after the tests form the second part. Finally, analyzing the failures and obtaining information about the behavior of the MEMS devices during ESD is the third part. All these steps are shown in a sequential measurement process flowchart in figure 4. Functionality tests were first performed using the LDV to measure the displacement versus actuation voltage for these devices. The devices were actuated with a triangular wave at a frequency well below their natural resonance frequency. Following this, ESD testing was performed on the devices using a wafer-level HBM tester as described in section 3.2 below. Optical topography and functionality measurements were repeated after the ESD in order to assess the impact of ESD on the functionality. The good devices were used for ESD testing at higher zap levels. Testing was continued until failure. The criterion for failure of a micromirror is based on its dynamic tilt angle since mirrors with a tilt angle less than 3. Measurement techniques 3.1. Test methodology A systematic test methodology was followed for the ESD testing of MEMS. Defining the functionality criteria for the 3 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al Entity Description Functionality test Out-of-plane Displacement/Velocity measurement with Laser Doppler Vibrometer ESD test Wafer level HBM ESD test MEMS DeviceUnder-Test Micromirrors OR RF capacitive switches Failure Analysis Microscopic inspection after ESD-induced failure Figure 4. Flowchart of the measurement process flow. Figure 5. Simple schematic of a human body model. Figure 6. Comparison of voltage discharge waveforms measured across a micromirror after a 20 V zap during HBM and MM tests; MEMS show similar behavior for MM and HBM events because of their high impedance. 4 mrad are considered to be failed for the targeted specific application. A scanning electron microscope (SEM) was used after the ESD tests for failure analysis and to examine damage. A digital microscope was also used for this purpose. automated, assembly, packaging or testing. Therefore in the model schematic for MM, the 1500 RHBM shown in figure 5 is replaced by a short (0 ). The voltage discharge waveform across the MEMS during ESD and the failure levels are very similar to those during an HBM event as shown in figure 6. This can be attributed to the high impedance of the capacitive MEMS devices. Since the equivalent resistance of the MEMS exceeds the value of RHBM by several orders of magnitude, the difference of 1500 between the resistances in the HBM and MM tester models is quite insignificant. Consequently, for MEMS devices, HBM tests are sufficient to obtain the required information regarding the reliability during both MM and HBM stress events. 3.2. Wafer level HBM ESD tests To study the ESD sensitivity for micromirrors, wafer-level ESD testing was performed on 5 × 5 sized micromirror arrays and individual micromirrors using a wafer-level ESD tester [13]. The human body model (HBM) gives the most commonly used approximation of a real-life ESD event. The simple RC model of the HBM tester with CHBM = 100 pF and RHBM = 1500 as shown in figure 5 simulates the practical scenario where a charged human (operator), on making contact with an ESD-sensitive device, discharges all the charge in his body through the device to the ground [1]. For the HBM ESD tests on the MEMS, the CHBM in the HBM tester was first charged up to the desired ESD zap level and then discharged through the RHBM and the MEMS DUT to the ground. The voltage discharge across the MEMS during ESD was measured and used to study the behavior of the device under the ESD stress. 4. Results of measurements 4.1. HBM tests on micromirrors As described in section 3.2, HBM zap voltages starting at 10 V and increasing in steps of 10 V were applied across the mirror and one of the bottom electrodes. The voltage discharge measured across an individual micromirror after a 30 V HBM zap is shown in figure 7(a). It was found that the discharge time of the voltage waveform measured across the MEMS device during an HBM stress is in the order of milliseconds, which is very long. In comparison, HBM discharge times in most ESD-protected CMOS devices are less than a microsecond. At the point of failure, it was observed 3.3. Machine model versus human body model tests Machine model (MM) testing was also done on the electrostatic SiGe MEMS. The MM represents the real-life ESD event where a charged machine or instrument, instead of a human as in the case of HBM, discharges through a device to the ground. In real life, this is a typical scenario during 4 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al (a) (b) Figure 7. Voltage discharge waveform measured across the micromirror after an HBM-ESD zap of (a) 30 V (mirror is still functional) and (b) 60 V (mirror is failed and the discharge is fast); note the different time scales of both the figures. is thus limited by the leakage inside the HBM tester itself which is why all the three waveforms show a similar and long exposure time of several milliseconds. It is significant to note that this tester leakage is not a limitation normally while doing tests on active CMOS circuits which conduct current (and have low impedance) during operation. It is thus concluded that for high impedance open capacitive MEMS devices, the discharge time durations are only limited by the leakage in the ESD tester. 4.2. HBM tests on RF MEMS actuators Figure 8. Voltage discharge waveforms measured across the MEMS after 50 V HBM zap, across the substrate when no MEMS device is connected, and from the ESD tester with the probe needles lifted. Wafer-level ESD testing has also been done on the RF MEMS actuators to determine their ESD failure levels. HBM zaps have been given to the device at various levels till failure. The HBM voltage discharge waveform across a test device after a 50 V zap is shown in figure 9(a). The electrostatically actuated switches used for the present test are also capacitive (open) MEMS devices. Hence, a similar waveform can be expected as in the case of the micromirrors. A large number of identical devices were tested for consistency of measurement results. The ESD failure levels for these devices were measured to be in the range of 120–160 V. During failure, multiple large and fast current spikes were observed during the first microsecond as shown in figure 9(b). These were accompanied by simultaneous drops in the voltage discharge waveform which coincided with the current peaks. It is concluded that during failure, the electrical breakdown occurs across the narrowing air gap between the bridge and the bottom electrode of the closing switch. Very often, this stage of failure is succeeded by a contact formation which results in high current flow and welding damage. that the voltage measured across the MEMS decayed faster by nearly three orders of magnitude—during a few tens of microseconds—as shown in figure 7(b). Most of the arrays tested showed failure levels of 40 V whereas the failure level for the individual mirrors was about 60 V. The HBM zap tests were stopped on seeing signs of failure [7]. 4.1.1. Long discharge after ESD in capacitive MEMS—the tester effect. The long voltage discharge waveform measured across the MEMS after a low pre-charge level HBM zap can be explained by the following three tests. First, HBM ESD zaps were applied across a poly-SiGe micromirror at a zap level lower than the ESD failure level. Next, HBM zaps were applied across a set of identical and adjacent bond pads with no MEMS device connected in between. In the third test, HBM zaps were applied while the probe needles of the tester were lifted high away from the substrate. The probe needles were also well separated from each other to avoid sparking between the needles. The respective voltage discharge waveforms which were all measured for a 50 V HBM zap are shown in figure 8. All the three observed discharge waveforms are similar and they have an RC time constant of 1.3 ms. When the mirror is not pulled in, it behaves like an open circuit. Consequently, the charge that is transferred to the mirror during the ESD zap cannot leak away through the mirror. The time duration of the observed discharge waveform 4.3. Position-dependent failure in large micromirror arrays Experiments on arrays of 100 × 100 micromirrors show that the damage is limited to the first few rows closest to the actuation electrodes as shown in figure 10. The first few mirrors fail under the impact of the ESD stress and this causes the voltage seen across the mirrors in the next rows to reduce. Thus, these mirrors do not suffer sufficient voltage stress to fail. 5 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al (a) (b) Figure 9. Voltage discharge waveform across the actuator after an HBM-ESD zap of (a) 50 V and (b) 160 V (current spikes seen at failure; current measurements were limited to 160 mA.). Figure 10. Position-selective failure in large sized micromirror arrays and schematic to demonstrate the effect of device capacitance on the ESD failure level. ESD failure in large micromirror arrays can be explained in terms of their capacitance. Since all the mirrors in the array described above are ganged electrically in parallel to each other, the total capacitance of the array is the sum of the capacitances of all the mirrors. Due to this large capacitance, the ESD zap will result in a relatively lower peak voltage stress. The higher the number of mirrors in the array, the lower will be the peak voltage for a given ESD zap. In other words, the micromirror array will reach the failure level at higher ESD zap amplitudes when zapped by an HBM tester as shown in figure 10. Therefore, MEMS with larger capacitance are likely to be more ESD robust. 5. Failure analysis 5.1. Visual inspection with optical profilometry Optical profilometry is a key tool in failure analysis of MEMS because it allows studying the topography of the MEMS with high accuracy. Figure 12 shows the optical profiles of a 5 × 5 micromirror array both before and after ESD stress. As can be seen, micromirrors got pulled-in as a result of ESD stress. A similar result is observed for the RF MEMS actuators. 5.2. Specs comparison with functionality measurements Functionality tests were done on the MEMS both before and after ESD zapping in order to quantify the impact of ESD on the device specifications. The 5 × 5 sized micromirror array discussed in figure 2 is a good example to illustrate this point. All the mirrors in the array were found to be functional before the ESD test with an average tilt angle of 5.3 mrad as shown in figure 2. After ESD stress at a zap level of 40 V, functionality measurements were repeated. The result is shown in figure 13. Many mirrors in the array are pulled in and show hardly any movement for the same range of actuation voltages. The array is clearly out-of-specs. It should be noted that not all the mirrors of the array suffer damage in the same way. Some of the mirrors remain stuck after pull-in. These are shown 4.4. Impact of mechanical stiffness on the ESD failure level It is observed that mechanical properties such as the stiffness constant of the MEMS DUT influence the ESD sensitivity. In order to illustrate this, ESD measurements were done on micromirrors with hinge widths of W = 350 nm and W = 250 nm. Since the rotational stiffness of a rectangular cross-section torsion beam varies approximately with W 4 , the 350 nm hinge is expected to be four times stiffer than the 250 nm hinge. In turn, this fourfold increase in stiffness gives rise to a twofold increase in the pull-in voltage. From figure 11, a similar increase in the ESD failure level is seen for the 350 nm hinge. 6 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al Figure 11. Dependence of ESD failure levels on mechanical stiffness (torsional hinge width of micromirrors). (a) (b) Figure 12. Optical profilometry on the surface of a micromirror array (a) before ESD tests and (b) after a 40 V ESD zap shows pull-in of mirrors due to ESD. Figure 13. Tilt-angle measurements on a micromirror array after ESD stress show failure and loss of functionality: ESD failure level ∼40 V; mean tilt angle before ESD ∼5.3 mrad (refer to figure 2). in black in figure 13 and have very low tilt angles. Some other mirrors do not get pulled in but merely show reduced tilt angles. It is inferred that this is due to the permanent leakage in the pulled-in mirrors and the corresponding voltage drop in the damaged array which causes a lower actuation potential to be seen across these mirrors. of the mirrors in the array were blown away as shown in figure 14. A lot of welding damage between the bottom electrodes of adjacent mirrors was observed. In the tested devices, these electrodes were placed very close to each other (∼300 nm) which can potentially cause sparking across the air gap between them. Designing a wider gap between these electrodes is possibly a good way of avoiding gap breakdown and current flow between them. New test structures have been designed with wider electrode spacing and wider gaps between adjacent mirrors in the array. RF MEMS actuators also show ESD failure for low zap levels and the failure is studied by inspecting them under a 5.3. Verifying failure modes with a scanning electron micrograph Scanning electron micrographs (SEM) were taken after the ESD reliability tests to examine damage with a high level of resolution and accuracy. The SEM showed that most 7 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al Figure 14. SEM of the micromirror array after ESD shows two things: (1) most mirrors are blown away and (2) welding damage is commonly seen between electrodes of adjacent mirrors. Figure 15. SEM of RF MEMS capacitive switches after ESD shows the most probable point of failure. Damage is seen along the edge of the bottom electrode. Ripping the switch off shows evidence of hot-spot formation in the electrode. thus there is a real need to protect these devices in applications. HBM ESD failure voltage levels of 40 V for micromirror arrays and around 120 V for RF capacitive switches have been obtained. This puts them in the class 0 level of ESD-sensitive devices, i.e., the ultra-sensitive category [1]. Secondly, it has been shown that the high impedance of electrostatic MEMS makes the ESD stress voltage discharge over a very long time (∼ms) often resulting in an overstresscaused failure and high EOS/ESD sensitivity. Leakage in conventional ESD testers has been shown to limit this discharge duration to a few milliseconds. Most often the failure is seen in the form of an electrical short. This is also accompanied by current-related damage and welding around the spot of contact. On the other hand, higher capacitance in MEMS devices helps toward ESD robustness by limiting the maximum amplitude of the voltage stress. Contact breakdown followed by current flow resulting in hot spots and welding has been identified as a potential failure mode in MEMS during ESD events. RF actuators are found scanning electron microscope. Figure 15 shows an actuator after failure at a zap level of 160 V. Current-caused damage is indicated by the bright spot and damage seen on the actuator bridge. Ripping the bridge off and examining the electrode underneath shows localized damage that suggests current flow through a contact breakdown. It is also observed with the help of profilometry that such damages are seen along the edge of the bottom electrode which is in contact with the pulled in actuator. 6. Conclusions Wafer-level HBM ESD reliability tests on electrostatic SiGe MEMS devices are discussed in this paper. Two representative test vehicles in the form of torsional micromirrors and capacitive switches were chosen. It has been demonstrated that unprotected electrostatic MEMS are very sensitive to ESD stress. The observed ESD failure levels are extremely low and 8 J. Micromech. Microeng. 20 (2010) 055005 S Sangameswaran et al to suffer this damage at those locations where they come into contact with the bottom electrode under ESD stress. Apart from designing MEMS with better ESD performance, it is also essential to have ESD protection on the MEMS devices before they go into a package. ESD protection for MEMS is very essential not only for stand-alone MEMS applications but also where the MEMS and CMOS are placed side-by-side on the same package and are connected to each other, for e.g., by wire bonds. In this case the MEMS itself can be subjected to ESD during handling and bonding processes. Also, MEMS co-integrated on top of CMOS is not always a cost-effective or area-effective alternative. MEMS actuation voltage levels are often much higher than the voltage levels seen in many CMOS devices and as such not all MEMS can be easily integrated with CMOS. Therefore, ESD protection for MEMS may not always be CMOS based but also merits a lot of attention along a MEMS-based approach. To summarize, ESD is a real threat to the reliability of electrostatic SiGe MEMS devices and needs to be investigated in depth to understand the failure mechanisms. ESD protection for MEMS is a highly relevant and challenging task, especially important from the reliability perspective. [2] Walraven J A, Waterson B A and De Wolf I 2002 Failure analysis of MEMS Microelectronic Failure Analysis (Materials Park, OH: ASM International) pp 75–98 (Desk Reference Supplement) [3] Amerasekera A and Duvvury C 2002 ESD in Silicon Integrated Circuits 2nd edn (New York: Wiley) [4] Walraven J A, Soden J M, Tanner D M, Tangyunyong P, Cole E I Jr, Anderson R R and Irwin L W 2000 Electrostatic discharge/electrical overstress susceptibility in MEMS: a new failure mode Proc. SPIE 4180 30–9 [5] Tazzoli A, Peretti V and Meneghesso G 2007 Electrostatic discharge and cycling effects on ohmic and capacitive RF-MEMS switches IEEE Trans. Device Mater. Reliab. 7 429–37 [6] Ruan J, Nolhier N, Bafleur M, Bary L, Coccetti F, Lisec T and Plana R 2007 Electrostatic discharge failure analysis of capacitive RF MEMS switches Microelectron. Reliab. J. 47 1818–22 [7] Sangameswaran S, De Coster J, Linten D, Scholz M, Thijs S, Haspeslagh L, Witvrouw A, Van Hoof C, Groeseneken G and De Wolf I 2008 ESD reliability issues in MEMS: a case study on micromirrors Proc. 30th EOS/ESD Symp. (Tucson, USA) pp 249–57 [8] Gromova M et al 2007 Highly reliable and extremely stable SiGe micro-mirrors Proc. 20th IEEE Int. Conf. on Micro Electro. Mechanical Systems (Hyogo, 21–25 January 2007) pp 759–62 [9] De Coster J, Haspeslagh L, Witvrouw A and De Wolf I 2008 Long-term reliability measurements on MEMS using a laser-Doppler vibrometer Proc. SPIE 7155 71550G [10] Zhao J P, Chen H L, Huang J M and Liu A Q 2005 A study of dynamic characteristics and simulation of MEMS torsional micromirrors Sensors Actuators A 120 199–210 [11] Czarnecki P et al 2008 New insights into charging in capacitive RF MEMS switches Proc. 46th IRPS Int. Symp. (Phoenix, USA, 2008) pp 496–505 [12] ESA Endorfins Project Nr: 18613/05/NL/1 A [13] Scholz M, Thijs S, Linten D, Trémouilles D, Sawada M, Nakaei T, Hasebe T, Natarajan M I and Groeseneken G 2007 Calibrated wafer-level HBM measurements for quasi-static and transient device analysis Proc. 29th EOS/ESD Symp. (Anahiem, USA) pp 89–94 Acknowledgments The authors would like to thank Dr Ann Witvrouw and Dr Luc Haspeslagh of IMEC for processing the micromirror samples and providing them for testing. The authors would also like to thank Piotr Czarnecki of IMEC for providing the RF MEMS actuator samples from the ESA Endorfins project. References [1] ANSI/ESD STM5.1-2007 2007 Human body model (HBM): component level (Rome/New York: ESD Association) 9