Systems and Methods for Providing Override Control for a
advertisement

US 20140205048A1
(19) United States
(12) Patent Application Publication (10) Pub. N0.: US 2014/0205048 A1
Petzen et al.
(54)
(43) Pub. Date:
SYSTEMS AND METHODS FOR PROVIDING
(52)
OVERRIDE CONTROL FOR A FEEDWATER
US. Cl.
CPC ...................................... .. G21C 7/36 (2013.01)
PUMP RECIRCULATION VALVE
USPC ........................................................ .. 376/210
57
(71)
Applicant: GENERAL ELECTRIC COMPANY,
(72)
Inventors, John Petzen Salem VA (Us), Gautam
Schenectady NY (Us)
’
J ’
.
(
ABSTRACT
)
. .
.
Systems and methods for prowdmg override control for a
feedwater pump reelrculation valve are prOV1ded.Accord1ng
' Chatter.i Sc’henecte’ld NY (GS)
processor may be con?gured to receive one or more measure
ments associated With pump motor power driving feedwater
_
?CUTSRIC COMPANY’
C enec a y’
(
to one embodiment, a system may include a controller and a
processor communicativer coupled to the controller. The
y’
(73) ASSlgnee'
Jul. 24, 2014
)
pump ?ow. The feedwater pump recirculation valve may be
(21)
_
Appl' NO" 13/747’986
con?gured to maintain a predetermined minimum recircula
tion ?ow through the feedwater pump by regulating recircu
lation pump ?ow through a recirculation line. The processor
(22)
_
Flled3
may be also con?gured to calculate, based at least in part on
the one or more measurements, the recirculation pump ?ow,
Jan- 23’ 2013
and compare the recirculation pump ?ow to the predeter
mined minimum recirculation ?ow. Based at least in part on
Publication Classi?cation
the comparing, the processor may selectively provide an over
nt.
.
51ICl
G21 C 7/36
'd
l'glhfd
r1 e contro s1 na tot e ee water
(2006.01)
um reelrcu atlon va ve
pp'l'l
to selectively modify the recirculation pump ?ow.
1 00
i
Peedwater
i 0 5 Pump
13o f......................... ?
1
:35
Dif'ferential»
Pressure li‘iowmeter
1 25
Motor
Control System
1 l5
Contro 1 ler
‘ 1 1‘3
Patent Application Publication
Jul. 24, 2014 Sheet 1 0f 6
US 2014/0205048 A1
196
Feedwater Pump
k”.
“w
130 ? A
1
Diffbrcmial-
‘\ 110
1 $
1
Prassul'e Ei’lnwmatar
1
Mom!"
Cuntml Sysiem
V
(Innimller
@
HG. i
V
Patent Application Publication
Jul. 24, 2014 Sheet 2 0f 6
US 2014/0205048 A1
200
295 A Receive One 61“ Mare Measuremsnts Assaciated with
Pump Mcmr PQ'W?l' Driving Feedwater Pump 55‘ 10W
21 GA
7
Based at Least in Part on the ?ne or Mare
Mcasurcmcntse Calculate the Rscircuiation Pump
Flaw
Compare the Rcairouiatievn Pump Flaw to a
215 A
Predctennincd Minimum Recimulatimi Flaw
Based at Least in Part on {he Comparing, Salestiveiy
229 A Provide an Ovsiride Cantmi Signal m this Feifdwatar
Pump Recirculatian Valve
Patent Application Publication
Jul. 24, 2014 Sheet 3 0f 6
US 2014/0205048 A1
com
W
cm
S,Q\DS\QUQ\
»
m.wi
mmPE:02
EumEE.U“53uEuEm
QBE0295m5u0m
Patent Application Publication
Jul. 24, 2014 Sheet 4 0f 6
US 2014/0205048 A1
hag/M WSEQU 58§m$.
a?
@md
a? Sw?vmw mow MS“\7Qi
MEast“,ch
w.wmm
mw Emg?WQ Qm a?
m?
Ei
Patent Application Publication
Pawer
Jul. 24, 2014 Sheet 5 0f 6
US 2014/0205048 A1
Patent Application Publication
Jul. 24, 2014 Sheet 6 0f 6
Programmed
Data
Eagle
63 Q
US 2014/0205048 A1
620
Mammy
616
Operating sygmm
PTO'TSSW
646
036
‘5‘
,\
l
\
/
Data Bus
\
660
I
\
I{v}
T“ ‘
I
t" :
=.
L 5“ {1?me C
svweaas)
m
(a IQ
600
//
V
V
A
l/O intertace?)
v,
686
Jul. 24, 2014
US 2014/0205048 A1
SYSTEMS AND METHODS FOR PROVIDING
OVERRIDE CONTROL FOR A FEEDWATER
PUMP RECIRCULATION VALVE
TECHNICAL FIELD
[0001] This disclosure relates generally to feedwater pump
control systems, and more particularly, to systems and meth
ods for providing override control for a feedwater pump recir
culation valve.
BACKGROUND
[0002] A feedwater pump can be used to supply feedwater
into a steam boiler. To protect the feedwater pump from
damaging conditions during operation, a ?ow through the
The processor may also be con?gured to calculate, based at
least in part on the one or more measurements, the recircula
tion pump ?ow, and to compare the recirculation pump ?ow
to the predetermined minimum recirculation ?ow. Based at
least in part on the comparing, the processor may selectively
provide an override control signal to the feedwater pump
recirculation valve to selectively modify the recirculation
pump ?ow.
[0006] In one embodiment, another system may be pro
vided. The system may include a feedwater pump, a control
ler con?gured to control the feedwater pump, and a processor
communicatively coupled to the controller. The processor
may be con?gured to receive one or more measurements
associated with pump motor power driving feedwater pump
?ow. The feedwater pump recirculation valve may be con?g
feedwater pump is maintained above a recommended mini
mum value. The recommended minimum value can be met by
having a minimum ?ow recirculation valve recirculate water
in the pump as needed. The minimum ?ow recirculation valve
is conventionally controlled based on measurements of the
feedwater pump delivery pressure or ?ow.
ured to maintain a predetermined minimum recirculation
[0003]
in industrial applications is calculation of the ?uid ?ow rate
differential-pressure ?owmeter, that recirculation pump ?ow
is above the predetermined minimum recirculation ?ow
based on readings of the pressure loss across a pipe restriction
whereas the calculated recirculation pump ?ow based at least
A conventionally used ?ow measurement technique
?ow through the feedwater pump by regulating recirculation
pump ?ow through a recirculation line. The processor may
also be con?gured to calculate, based at least in part on the
one or more measurements, the recirculation pump ?ow, and
to determine, based at least in part on a signal provided by a
using a differential -pressure ?owmeter. Differential-pressure
in part on the one or more measurements is below the prede
?owmeters can rely upon a pressure connection on both sides
of a ?ow element, such as an ori?ce plate or venturi ?ow
termined minimum recirculation ?ow. Based at least in part
on the determining, the processor may provide an override
control signal to the feedwater pump recirculation valve to
increase the recirculation ?ow above the predetermined mini
noZZle. The connections are called impulse lines, and typi
cally contain root isolation valves at the piping connection to
the main feedwater piping. If these impulse lines become
partially or completely blocked by corrosion products or an
incorrectly positioned root valve, the ?ow indication may be
incorrect. If the ?ow indication reads higher than the actual
mum recirculation ?ow.
[0007] Other embodiments and aspects will become appar
ent from the following description taken in conjunction with
the following drawings.
?ow, the recirculation valve control loop may act based on the
incorrect ?ow reading, causing the recirculation valve to
close to a position that allows less ?ow through the pump than
the recommended minimum, and pump damage can occur.
BRIEF DESCRIPTION OF THE DISCLOSURE
[0004] The present disclosure relates to systems and meth
ods for providing override control for a feedwater pump recir
culation valve. According to one embodiment, a method can
be provided. The method can include receiving one or more
measurements associated with pump motor power driving
feedwater pump ?ow, wherein the feedwater pump recircu
lation valve may be con?gured to maintain a predetermined
minimum recirculation ?ow through the feedwater pump by
regulating recirculation pump ?ow through a recirculation
line, based at least in part on the one or more measurements,
calculating the recirculation pump ?ow, and comparing the
recirculation pump ?ow to the predetermined minimum recir
culation ?ow. Based at least in part on the comparing, an
override control signal to the feedwater pump recirculation
valve may be provided to selectively modify the recirculation
pump ?ow.
[0005] According to one embodiment, a system may
include a controller con?gured to control a feedwater pump
and a processor communicatively coupled to the controller.
BRIEF DESCRIPTION OF THE DRAWINGS
[0008]
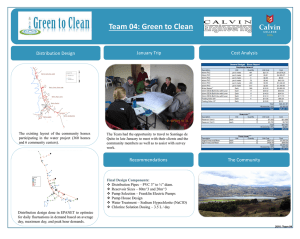
FIG. 1 depicts a simpli?ed block diagram illustrat
ing an example environment and a system in accordance with
an embodiment of the disclosure.
[0009] FIG. 2 depicts a process ?ow diagram illustrating an
example method for providing override control for a feedwa
ter pump recirculation valve, in accordance with an embodi
ment of the disclosure.
[0010] FIG. 3 depicts a process ?ow diagram illustrating a
detailed example method for providing override control for a
feedwater pump recirculation valve, in accordance with an
embodiment of the disclosure.
[0011]
FIG. 4 depicts an example system for providing
override control for a feedwater pump recirculation valve, in
accordance with an embodiment of the disclosure.
[0012] FIG. 5 depicts an example characteristic curve of
power versus ?ow, in accordance with an embodiment of the
disclosure.
[0013] FIG. 6 depicts a block diagram illustrating a con
troller for controlling a generator, in accordance with an
embodiment of the disclosure.
DETAILED DESCRIPTION
The processor may be con?gured to receive one or more
[0014]
measurements associated with pump motor power driving
feedwater pump ?ow. The feedwater pump recirculation
valve may be con?gured to maintain a predetermined mini
mum recirculation ?ow through the feedwater pump by regu
lating recirculation pump ?ow through a recirculation line.
ences to the accompanying drawings, which form part of the
The following detailed description includes refer
detailed description. The drawings include illustrations in
accordance with example embodiments. These example
embodiments, which are also referred to herein as
“examples,” are described in enough detail to enable those
Jul. 24, 2014
US 2014/0205048 A1
skilled in the art to practice the present subject matter. The
example embodiments may be combined, other embodiments
may be utilized, or structural, logical, and electrical changes
may be made, without departing from the scope of the
tion may be compared to a minimum pump ?ow per vendor
speci?cations. If the ?ow is below the minimum ?ow set
claimed subject matter. The following detailed description is,
point, the loop controller for the feedwater pump recircula
therefore, not to be taken in a limiting sense, and the scope is
tion valve may receive an override control signal, and shifts
from using the ?ow from the differential pres sure ?ow instru
ment to using the ?ow calculated from pump power.
[0020] The technical effects of certain embodiments of the
disclosure may include preventing damage to a feedwater
pump by detecting incorrect ?ow readings based on a redun
de?ned by the appended claims and their equivalents.
[0015] The embodiments described herein relate to systems
and methods for providing override control for a feedwater
pump recirculation valve. When the feedwater pump is in
operation, the pressure of the ?uid passing through pump is
increased. The temperature of the ?uid increased due to
mechanical contact with the feedwater pump. If the ?ow rate
of the ?uidpassing through the pump is too low the pump may
overheat. To prevent or otherwise minimize overheating,
many pumping systems use minimum recirculation piping to
direct part or all of the pump discharge ?ow back upstream of
the pump where the ?ow is cooled before returning to the
pump. Some power plants include minimum ?ow recircula
tion piping for feedwater pumps. The recirculation ?ow may
be sent to the deaerator or condenser. During plant startup or
shutdown, the demand for feedwater may be low. The control
valve associated with the minimum ?ow recirculation piping
may open to direct the ?ow back upstream. During normal
operation, the demand for feedwater may be higher and the
minimum ?ow recirculation valve is closed. The minimum
?ow recirculation valve may automatically protect feedwater
pumps during low load operations. As the pump load drops
istic curve of power versus ?ow, typically as supplied by the
pump vendor. The ?ow calculated by the interpolation func
dant backup minimum ?ow indication that is not susceptible
to impulse line plugging failure modes.
[0021] Referring now to FIG. 1, a block diagram illustrates
a system environment 100 suitable for providing override
control for a feedwater pump recirculation valve, in accor
dance with one or more example embodiments. In particular,
the system environment 100 may comprise a feedwater pump
105, a pump motor 110, a motor control system 115, a con
troller 600, a differential-pressure ?owmeter 125, a current
transformer 130, a potential transformer 135, and a feedwater
pump recirculation valve 140.
[0022] The feedwater pump 105 may be driven by the pump
motor 110 to supply feedwater from a deaerator (not shown)
to a boiler (not shown). The differential-pressure ?owmeter
125 may be con?gured to measure recirculation ?ow through
the feedwater pump 105 and to provide a signal indicative of
the measurements to the controller 600. The motor control
below a predetermined minimum ?ow rate, the recirculation
valve may cause the bypass bush to open a bypass ?ow path.
The pump minimum ?ow rate is thus reached and maintained.
[0016] The minimum ?ow recirculation valve may be con
con?gured to measure pump motor power and transmit the
measurements to the controller 600.
trolled by measuring ?uid ?ow rate through the feedwater
pump motor power may be detected by one or more trans
pump. Conventionally, differential-pressure type ?owmeters
formers connected to the motor control system 115. The one
have been widely used in ?ow measurement techniques. In
general, differential-pressure ?owmeters may rely upon a
a potential transformer 135, and so forth. The feedwater pump
pressure connection on both sides of a ?ow element, such as
an ori?ce plate or venturi ?ow nozzle. The connections can be
called impulse lines, and typically contain root isolation
valves at the piping connection to the main feedwater piping.
[0017] However, during commissioning, signi?cant
amounts of corrosion products may be produced in power
plant piping. If the impulse lines become partially or com
pletely blocked by corrosion products or an incorrectly posi
tioned root valve, the ?ow indication may be incorrect. If the
?ow indication reads higher than actual ?ow, a recirculation
valve control loop may act based on the incorrect ?ow reading
causing the recirculation valve to close to a position that
allows less ?ow through the pump than the minimum required
to prevent or otherwise minimize pump damage.
[0018] In accordance with an embodiment of the disclo
sure, pump motor power may be used to calculate actual
developed ?ow through the feedwater pump to provide an
override control signal to the feedwater pump recirculation
valve if the pump power consumed indicates that ?ow
through the feedwater pump is below a design minimum ?ow.
[0019] Actual pump motor power may be detected by a
smart motor control center (e.g., a GE Multilin MM300) and
transmitted to a control system. Alternatively, pump current
and voltage may be detected by current and potential trans
formers directly connected to control system I/O cards and
system 115 may be coupled to the pump motor 110 and
[0023]
In accordance with one example embodiment,
or more transformers may include a current transformer 130,
recirculation valve 140 may be con?gured to regulate recir
culation ?ow through the feedwater pump 105.
[0024] The operations of the feedwater pump 105 may be
managed by the controller 600. The controller 600 may inter
act with the differential-pressure ?owmeter 125 to receive
measurements associated with pressure drops, ?uid levels,
?ow rates and so forth. The controller 600 may also interact
with the motor control system 115 to receive a feedback
associated with power consumption in the pump motor 110.
[0025]
In accordance with one example embodiment,
pump motor power may be measured by transformers con
nected to the motor control system 115. For example, feed
water pump current and voltage may be detected by current
and potential transformers 130, 135 connected to the control
ler input/output (I/O) cards and calculated by the controller
600.
[0026] During pump operation, ?ow may be constantly
measured by a differential-pressure ?owmeter 125 and cor
responding signals sent to the controller 600. When it is
determined that the ?ow rate drops below a predetermined
minimum recirculation ?ow recommended by a pump manu
facturer, an alarm signal may be sent to the controller 600 to
prevent or otherwise minimize possible pump damage. How
ever, there may be instances, when the differential-pressure
?owmeter 125 shows an incorrect ?ow reading due to an
calculated in the control system. The pump motor power may
impulse line plugging failure in feedwater piping. Therefore,
be converted into ?ow by using an interpolation function in
the control system preprogrammed with the pump character
in order to assure the correct feedwater pump operation, an
override control of the feedwater pump recirculation valve
Jul. 24, 2014
US 2014/0205048 A1
140 based on electrical power measurements may be pro
characteristic curve of power versus ?ow, typically as pro
vided. In particular, if the measured power indicates that
recirculation ?ow through the feedwater pump 105 is below a
vided by the pump manufacturer. The interpolation function
predetermined minimum recirculation ?ow, the controller
600 may send an override control signal to the feedwater
pump recirculation valve 140, which causes the recirculation
valve 140 to open and allow more ?ow to the feedwater pump
105. This, in turn, will increase pump motor power and raise
the ?ow above the predetermined minimum ?ow. Thus, ?ow
calculations based on the pump motor power may allow veri
fying measurements reported by the differential-pressure
?owmeter 125.
[0027] In accordance with one example embodiment, the
controller 600 may be con?gured to manage the operation of
the feedwater pump recirculation valve 140 by providing an
override control signal to modify the recirculation ?ow. For
example, the override control signal may cause the feedwater
may include a cubic interpolation function.
[0032] In operation 215, the recirculation pump ?ow may
be compared to the predetermined minimum recirculation
?ow. The minimum recirculation ?ow may depend on the
pump design and the safety requirements of the plant and may
be speci?ed by a pump manufacturer.
[0033] In operation 220, based at least in part on the com
paring, an override control signal may be selectively provided
to the feedwater pump recirculation valve to modify the recir
culation pump ?ow. For example, if the calculated recircula
tion ?ow is below the predetermined minimum recirculation
?ow, the override control signal may be provided to the loop
controller of the feedwater pump recirculation valve to
increase the recirculation ?ow above the predetermined mini
mum recirculation ?ow. Such an increase may help to avoid
pump recirculation valve 140 to increase or decrease the
overheating and further damage of the feedwater pump. The
recirculation ?ow through the feedwater pump 1 05. The feed
water pump recirculation valve 140 may also include a loop
override control signal may be used to override a signal pro
vided by a differential-pressure ?owmeter associated with the
feedwater pump recirculation valve. When the signal pro
controller (not shown) that regulates the operation of the
feedwater pump recirculation valve 140.
[0028] An operator may interact with the controller 600 via
a user interface device, such as a keyboard, a mouse, a control
panel, or any other device capable of communicating data to
and from the controller 600.
[0029] FIG. 2 depicts a process ?ow diagram illustrating an
example method 200, in accordance with an embodiment of
the disclosure. The method 200 may be performed by pro
vided by the differential-pressure ?owmeter indicates that the
recirculation ?ow is above the predetermined minimum recir
culation ?ow, whereas the recirculation ?ow is below the
predetermined minimum recirculation ?ow based on the one
or more measurements, the override control signal may be
provided to the feedwater pump recirculation valve to
increase the recirculation ?ow above the predetermined mini
mum recirculation ?ow.
cessing logic that comprises hardware (e.g., dedicated logic,
[0034]
programmable logic, and microcode), software (such as soft
override control for a feedwater pump recirculation valve, in
accordance with an embodiment of the disclosure. Pump
motor power may be used to determine an actual ?ow through
ware run on a general-purpose computer system or a dedi
cated machine), or a combination of both. In one example
FIG. 3 depicts an example method300 for providing
embodiment, the processing logic may reside at the controller
a feedwater pump. In operation 305, one or more measure
600, which may, in turn, reside in a user device or in a server.
ments associated with pump motor power driving the feed
water pump ?ow may be received by a controller. The pump
motor power may be detected by a motor control system. In
accordance with one example embodiment, the pump motor
The controller 600 may comprise processing logic. It will be
appreciated by one of ordinary skill in the art that instructions
said to be executed by the controller 600 may, in fact, be
retrieved and executed by one or more processors. The con
power may be detected by one or more transformers con
troller 600 may also include memory cards, servers, and/or
nected to the motor control system.
computer discs. Although the controller 600 may be con?g
[0035]
ured to perform one or more steps described herein, other
may be used to calculate the actual recirculation pump ?ow
through the feedwater pump. The calculation may be per
control units may be utilized while still falling within the
scope of various embodiments.
[0030] As shown in FIG. 2, the method 200 may commence
in operation 205 with receiving one or more measurements
associated with pump motor power driving feedwater pump
?ow. The feedwater pump recirculation valve may be con?g
ured to maintain a predetermined minimum recirculation
?ow through the feedwater pump by regulating recirculation
pump ?ow through a recirculation line. The pump motor
power may be detected by a motor control system. In accor
dance with one example embodiment, the pump motor power
may be detected by one or more transformers connected to the
motor control system. For example, the one or more trans
formers may include a current transformer or a potential
In operation 310, the received pump motor power
formed using an interpolation function. The ?ow calculated
by the interpolation function may be then compared to a
predetermined minimum recirculation ?ow in operation 315.
If it is determined, in operation 320, that the calculated ?ow is
above the predetermined minimum recirculation ?ow, in
operation 325, it may be reported that the feedwater pump is
operating under safe conditions. However, if it is determined
that the calculated ?ow is below the predetermined minimum
recirculation ?ow, the recirculation ?ow may be compared to
a measured recirculation ?ow, as determined by a differential
pressure ?owmeter, in operation 330, to check whether the
calculated ?ow properly correlates to the ?ow as measured by
the differential-pressure ?owmeter.
transformer.
[0036] The signal provided by the differential-pressure
[0031]
?owmeter may indicate that the recirculation ?ow is above
In operation 210, the recirculation pump ?ow may
be calculated, based at least in part on the one or more mea
surements of pump motor power. An interpolation function
may be utilized to calculate the feedwater pump ?ow. The
pump motor power may be correlated to the ?ow by using the
interpolation function. The interpolation function may be
stored in the memory of the controller preprogrammed with a
the predetermined minimum recirculation ?ow, whereas the
recirculation ?ow is below the predetermined minimum recir
culation ?ow based on the one or more measurements asso
ciated with the pump motor power. In this case, the recircu
lation valve control loop may act based on the incorrect ?ow
reading causing the recirculation valve to move to a position
Jul. 24, 2014
US 2014/0205048 A1
that allows less ?ow through the pump than the predeter
characteristic curve of power versus ?ow, typically as pro
mined minimum recirculation ?ow required to prevent or
vided by a pump manufacturer. As shown in FIG. 5, the
interpolation function 500 may include a cubic interpolation
otherwise minimize pump damage.
[0037] Thus, upon detection of difference between the ?ow
calculated based on the pump motor power and the ?ow
measured by the differential-pressure ?owmeter, in operation
335, failure in the operation of the differential-pressure ?ow
meter may be reported in operation 345. The controller may
then provide, in operation 350, an override control signal to
the feedwater recirculation valve to modify the recirculation
?ow, i.e. transition from using the ?ow measured by the
differential-pressure ?owmeter to using the calculated ?ow.
In particular, the override control signal may be con?gured to
cause the recirculation valve to increase the recirculation ?ow
above the predetermined minimum recirculation ?ow as to
allow for improved operation of a plant. That is, the override
control signal may be used to override a signal provided by
the differential-pressure ?owmeter associated with the feed
water pump recirculation valve.
[0038] If, on the other hand, the ?ow calculated based on
the pump motor power corresponds to the ?ow measured by
the differential-pres sure ?owmeter, and both ?ows are below
the predetermined minimum recirculation ?ow, correct
operation of the differential-pressure ?owmeter may be
reported, in operation 340. In this case, the controller may
provide a control signal to the feedwater pump recirculation
to modify the recirculation pump ?ow.
[0039]
FIG. 4 depicts an example system 400 for providing
override control for a feedwater pump recirculation valve, in
accordance with an embodiment of the disclosure. Feedwater
may be supplied by a deaerator 405 to a feedwater pump 410.
The feedwater pump 410 may include a motor driven by a
pump motor 415. The feedwater pump 410 may provide
function, wherein the power is cubically proportional to the
?ow.
[0042] FIG. 6 depicts a controller 600 for providing over
ride control for a feedwater pump recirculation valve, in
accordance with an embodiment of the disclosure. More spe
ci?cally, components of the controller 600 may be used to
receive one or more measurements associated with pump
motor power driving a feedwater pump ?ow, wherein the
feedwater pump recirculation valve may be con?gured to
maintain a predetermined minimum recirculation ?ow
through the feedwater pump by regulating recirculation pump
?ow through a recirculation line, calculate, based at least in
part on the one or more measurements, the recirculation pump
?ow, compare the recirculation pump ?ow to a predetermined
minimum recirculation ?ow, and based at least in part on the
comparing, selectively provide an override control signal to
the feedwater pump recirculation valve to selectively modify
the recirculation ?ow. The controller 600 may include a
memory 610 for storing programmed logic 620 (e.g., soft
ware) and other data, such as, for example, measurements of
pump motor power, recirculation ?ow, operational data asso
ciated with parameters of a feedwater pump, a status of a
feedwater pump recirculation valve, and the like. The
memory 610 may also include an operating system 640. A
processor 650 may utilize the operating system 640 to execute
the programmed logic 620, and in doing so, the operating
feedwater to high-pressure (HP) feedwater heaters and boil
system 640 may also utilize the data 630. A data bus 660 may
provide communication between the memory 610 and the
processor 650. Users may interface with the controller 600
ers 435. The feedwater pump 410 may be equipped with a
via at least one user interface device 670 such as a keyboard,
feedwater pump recirculation valve 430, which recirculates
mouse, control panel, or any other devices capable of com
municating data to and from the controller 600. The controller
600 may be in communication with the feedwater pump recir
water back to a condensate inlet of the deaerator 405. The
feedwater pump 410 may be controlled and monitored by a
controller 600. The controller 600 may regulate recirculation
?ow through the feedwater pump 410 to the HP feedwater
heaters and boilers 435.
[0040] A motor control system 440 coupled to the control
ler 600 may periodically take measurements of pump motor
culation valve online while operating, as well as in commu
nication with the feedwater pump recirculation valve of?ine
while not operating, via an I/O Interface 680. More speci?
cally, one or more of the controllers 600 may carry out meth
ods described with reference to FIGS. 2-3 including receiving
power consumed during pump operation and provide the
one or more measurements associated with pump motor
measurements to the controller 600. Based on the measured
power driving a feedwater pump, wherein the feedwater
pump recirculation valve may be con?gured to maintain a
pump motor power, the actual ?ow developed by the feedwa
ter pump 410 may be calculated and the calculated ?ow may
be compared to a predetermined minimum recirculation ?ow
value. The calculated ?ow may then be compared to a ?ow
measured by a differential-pressure ?owmeter 425. Based at
least in part on the comparison, the controller 600 may selec
tively provide an override control signal to the feedwater
pump recirculation valve 430 to modify the recirculation
?ow.
[0041] FIG. 5 depicts an example characteristic curve of
power versus ?ow, in accordance with an embodiment of the
disclosure. According to the embodiment, the power-?ow
characteristic curve 505 represents the actual ?ow through a
feedwater pump based on pump motor power measured by a
motor control system. The calculation of the ?ow may be
based on an interpolation function 500. The interpolation
function 500 may comprise the pump motor power versus the
recirculation ?ow. The interpolation function 500 may be
stored in the memory of the controller preprogrammed with a
predetermined minimum recirculation ?ow through a recir
culation line; calculating, based at least in part on the one or
more measurements, the recirculation pump ?ow, comparing
the recirculation pump ?ow to the predetermined minimum
recirculation ?ow, and based at least in part on the comparing,
selectively provide an override control signal to the feedwater
pump recirculation valve to selectively modify the recircula
tion pump ?ow. Additionally, it should be appreciated by one
reasonably skilled in the art that other external devices or
feedwater pump recirculation valves may be in communica
tion with the controller 600 via the I/O Interface 680. In the
illustrated embodiment, the controller 600 may be located
remotely with respect to the feedwater pump recirculation
valve, although, it may be co-located or even integrated with
the feedwater pump recirculation valve. Furthermore, the
controller 600 and the programmed logic 620 implemented
thereby may include software, hardware, ?rmware, or any
combination thereof. It should also be appreciated that mul
Jul. 24, 2014
US 2014/0205048 A1
tiple controllers 600 may be used and different features
described herein may be executed on one or more different
controllers 600.
[0043]
Accordingly, embodiments described herein may
provide override control to the feedwater pump recirculation
valve by measuring pump motor power. Based on the mea
surements, the actual recirculation ?ow through the feedwa
limited to the example embodiments described above. There
fore, it is to be understood that the disclosure is not to be
limited to the speci?c embodiments disclosed and that modi
?cations and other embodiments are intended to be included
within the scope of the appended claims. Although speci?c
may be set and irregularities in feedwater pump operations
terms are employed herein, they are used in a generic and
descriptive sense only and not for purposes of limitation.
What is claimed is:
1. A method for providing override control for a feedwater
avoided or otherwise minimized.
pump recirculation valve, the method comprising:
ter pump may be calculated. Thus, a correct recirculation ?ow
References are made to block diagrams of systems,
receiving one or more measurements associated with pump
methods, apparatuses, and computer program products
motor power driving feedwater pump ?ow, wherein the
feedwater pump recirculation valve is con?gured to
maintain a predetermined minimum recirculation ?ow
[0044]
according to example embodiments. It will be understood that
at least some of the blocks of the block diagrams, and com
binations of blocks in the block diagrams, respectively, may
be implemented at least partially by computer program
instructions. These computer program instructions may be
loaded onto a general purpose computer, special purpose
computer, special purpose hardware-based computer, or
other programmable data processing apparatus to produce a
machine, such that the instructions, which execute on the
computer or other programmable data processing apparatus,
create means for implementing the functionality of at least
some of the blocks of the block diagrams, or combinations of
through the feedwater pump by regulating recirculation
pump ?ow through a recirculation line;
based at least in part on the one or more measurements,
calculating the recirculation pump ?ow;
comparing the recirculation pump ?ow to the predeter
mined minimum recirculation ?ow; and
based at least in part on the comparing, selectively provid
ing an override control signal to the feedwater pump
recirculation valve to selectively modify the recircula
tion pump ?ow.
2. The method of claim 1, wherein the override control
blocks in the block diagrams discussed.
[0045] These computer program instructions may also be
signal is to override a signal provided by a differential-pres
stored in a computer-readable memory that can direct a com
sure ?owmeter associated with the feedwater pump recircu
puter or other programmable data processing apparatus to
function in a particular manner, such that the instructions
stored in the computer-readable memory produce an article of
manufacture including instruction means that implement the
function speci?ed in the block or blocks. The computer pro
lation valve.
3. The method of claim 2, further comprising:
determining that the signal provided by the differential
gram instructions may also be loaded onto a computer or
pressure ?owmeter indicates that the recirculation ?ow
is above the predetermined minimum recirculation ?ow
whereas the recirculation ?ow is below the predeter
other programmable data processing apparatus to cause a
series of operational steps to be performed on the computer or
mined minimum recirculation ?ow based on the one or
more measurements; and
other programmable apparatus to produce a computer imple
mented process, such that the instructions that execute on the
computer or other pro grammable apparatus provide steps for
implementing the functions speci?ed in the block or blocks.
[0046] One or more components of the systems and one or
more elements of the methods described herein may be
implemented through an application program running on an
operating system of a computer. They also may be practiced
with other computer system con?gurations, including hand
held devices, multiprocessor systems, microprocessor based,
or programmable consumer electronics, mini-computers,
mainframe computers, etc.
[0047] Application programs that are components of the
systems and methods described herein may include routines,
programs, components, data structures, and so forth that
implement certain abstract data types and perform certain
tasks or actions. In a distributed computing environment, the
application program (in whole or in part) may be located in
local memory, or in other storage. In addition, or in the alter
based at least in part on the determining, providing an
override control signal to the feedwater pump recircula
tion valve to increase the recirculation ?ow above the
predetermined minimum recirculation ?ow.
4. The method of claim 1, wherein the pump motor power
is detected by a motor control system.
5. The method of claim 4, wherein the pump motor power
is detected by one or more transformers connected to the
motor control system.
6. The method of claim 1, wherein the calculating of the
recirculation ?ow is based at least in part on an interpolation
function.
7. The method of claim 6, wherein the interpolation func
tion comprises the pump motor power versus the recirculation
?ow.
8. The method of claim 1, wherein the override control
signal is provided to a loop controller of the feedwater pump
recirculation valve.
9. The method of claim 1, further comprising comparing
native, the application program (in whole or in part) may be
the recirculation ?ow to a measured recirculation ?ow as
located in remote memory or in storage to allow for circum
determined by a differential-pressure ?owmeter.
10. The method of claim 9, wherein the override control
stances where tasks are performed by remote processing
devices linked through a communications network.
[0048] Many modi?cations and other embodiments of the
example descriptions set forth herein to which these descrip
tions pertain will come to mind having the bene?t of the
signal is con?gured to cause the recirculation valve to
increase the recirculation ?ow.
11. A system for providing override control for a feedwater
pump recirculation valve, the system comprising:
teachings presented in the foregoing descriptions and the
a controller con?gured to control a feedwater pump; and
associated drawings. Thus, it will be appreciated the disclo
a processor communicatively coupled to the controller and
sure may be embodied in many forms and should not be
con?gured to:
Jul. 24, 2014
US 2014/0205048 A1
receive one or more measurements associated with pump
18. The system of claim 11, wherein the calculated recir
motor power driving feedwater pump ?ow, wherein the
feedwater pump recirculation valve is con?gured to
maintain a predetermined minimum recirculation ?ow
culation ?ow is compared to a measured recirculation ?ow
through the feedwater pump by regulating recirculation
signal is to cause the recirculation valve to increase the recir
culation ?ow.
20. A system for providing override control for a feedwater
pump ?ow through a recirculation line;
based at least in part on the one or more measurements,
calculate the recirculation pump ?ow;
compare the recirculation pump ?ow to the predetermined
minimum recirculation ?ow; and
based at least in part on the comparing, selectively provide
an override control signal to the feedwater pump recir
culation valve to selectively modify the recirculation
pump ?ow.
12. The system of claim 11, wherein the override control
signal is to override a signal provided by a differential-pres
sure ?owmeter associated with the feedwater pump recircu
lation valve.
13. The system of claim 1 1, wherein the pump motor power
is detected by a motor control system.
14. The system of claim 13, wherein the pump motor power
is detected by one or more transformers connected to the
motor control system.
15. The system of claim 11, wherein an interpolation func
tion is utilized to calculate the feedwater pump ?ow.
16. The system of claim 15, wherein the interpolation
function comprises the pump motor power versus the recir
culation ?ow.
17. The system of claim 11, wherein the override control
signal is provided to a loop controller of the feedwater pump
recirculation valve.
determined by a differential-pressure ?owmeter.
19. The system of claim 18, wherein the override control
pump recirculation valve, the system comprising:
a feedwater pump;
a controller con?gured to control the feedwater pump; and
a processor communicatively coupled to the controller and
con?gured to:
receive one or more measurements associated with pump
motor power driving feedwater pump ?ow, wherein the
feedwater pump recirculation valve is con?gured to
maintain a predetermined minimum recirculation ?ow
through the feedwater pump by regulating recirculation
pump ?ow through a recirculation line;
based at least in part on the one or more measurements,
calculate the recirculation pump ?ow;
determine, based at least in part on a signal provided by
a differential-pressure ?owmeter, that recirculation
pump ?ow is above the predetermined minimum
recirculation ?ow whereas the recirculation pump
?ow based at least in part on the one or more mea
surements is below the predetermined minimum
recirculation ?ow; and
based at least in part on the determining, provide an
override control signal to the feedwater pump recir
culation valve to increase the recirculation ?ow above
the predetermined minimum recirculation ?ow.
*
*
*
*
*