Analysis of Single-Phase Induction Motors

Advanced Science and Technology Letters
Vol.53 (AITS 2014), pp.357-360 http://dx.doi.org/10.14257/astl.2014.53.73
Analysis of Single-Phase Induction Motors Efficiency
Optimization Control with Hall Sensor
Xifeng Wang
1,2
, Dawei Meng
1
, Yongming Xu
1
College of Electrical and Electronic Engineering, Harbin University of Science and
Technology.
College of Electrical and Information Engineering, Heilongjiang Institute of Technology. wangxiaoxu0104@163.com
Abstract.
This thesis deals with the optimization control of a single-phase induction motors with Hall sensor. A simple modeling method with feasible parameter identification is adopted to meet characteristics of single-phase induction motors. With the linear Hall sensor feedback, the advantages of current-mode control scheme and soft-commutation scheme are proposed to achieve maximum efficiency over the entire speed range. This thesis also develops a low-cost and high efficiency control for single-phase induction motors. The hardware test platform has been constructed on a single-chip Field
Programmable Gate Array of Cyclone II Family of Altera to verify the performance and feasibility of the proposed optimization control strategies. The control scheme has been verified by computer simulation based on the proposed model. Some experimental results have been shown to verify the performance and feasibility.
Keywords: Open-loop voltage-mode control; Induction motors; Hall sensor
1 Introduction
It is essential for the electronic products to be elaborated and sophisticated, and the internal functions are various and high speed with fast advance in technology. The easiest way with low cost for forced air cooling is induction motors installations. The phase windings of induction motors can be categorized as three-phase, their flux distribution can be either sinusoidal or trapezoidal [1-2].
The proposed control schemes have been implemented on a single-chip DSP controller (TMS320LF2407A) to verify the performance and feasibility for single phase induction motors. Experimental verification has been carried out on a single phase induction motors control system [3-5].
2 Motor Athematical Modeling
Figure 1 shows the schematic of the full-bridge inverter and equivalent modeling for a single phase induction motors. The stator winding can be modeled as a winding
ISSN: 2287-1233 ASTL
Copyright © 2014 SERSC
Advanced Science and Technology Letters
Vol.53 (AITS 2014) resistance in series with a winding inductance and a back-EMF voltage. The voltage equation describing the dynamic behavior of single phase induction motors is given as follow [6-7]
C
Rectifier
Voltage source inverter
Speed regulator
Fig. 1. Schematic of the full-bridge inverter and equivalent modeling for a single phase induction motors.
Where v and i are the phase voltage and phase current, respectively. RS and LS are the winding resistance and the winding inductance, respectively. vemf is the back-
EMF voltage induced by rotor flux variation and the value is proportional to motor speed and can be computed by v e m f
K
E
(1) r
Therefore, the torque-speed characteristics can be formulated as
T e
J m d
r d t
B m
r
T
L
(2)
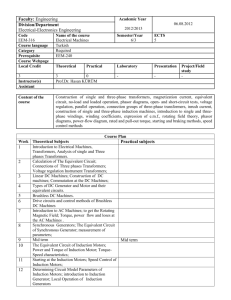
Figure 2 is the steady-state current response when using open-loop voltagemode of hard-commutation scheme. There is a significant current spike at commutation boundary. The dynamic behavior of current response is given as follow
v
v e m f
(1
e
R s t
L s )
(3)
R s
358 Copyright © 2014 SERSC
Advanced Science and Technology Letters
Vol.53 (AITS 2014)
Fig. 2. Simulation result of step response at operation point of 250 mA where v is the input voltage of phase winding. R s and L are the series s resistance and the series inductance of stator winding, respectively. v is e m f the back-EMF induced by rotor flux variation.
3 Efficiency Optimization of Single phase Induction Motors
Due to the machine design and structure, the induced back-EMF in the single phase induction motors is highly nonlinear and contains harmonics. The product of back-
EMF and phase current produces the electrical output power. Therefore, it has to consider all the harmonics when calculating output power. The average output power is presented as
P a v
1
T
0
T
( )
( )
(4)
4 Experimental Result Analysis
The current-loop sensorless control scheme can be verified by computer simulation with proposed model. Figure 3 shows the simulation results of current-loop control at different speed operation. It can be seen that the current spike at commutation boundary has been removed, and the current response closely follows current command. Besides, by look-up table of back-EMF, the current waveform retains the characteristic of corresponding back-EMF.
Copyright © 2014 SERSC 359
Advanced Science and Technology Letters
Vol.53 (AITS 2014)
Fig. 3. Simulation results of current-loop control at different speed operation 4000RPM
5 Conclusions
This thesis presents an efficiency optimization control scheme for single phase induction motors with linear Hall sensor. To produce the maximum output power, the each back-EMF control system with Hall sensor on a digital signal processing hardware platform. The DSP controller performs the real-time control algorithms, start-up control and current-loop control, etc.
References
1. L. Sun, Q. Fang and J. Shang.: Drive of single phase Brushless DC Motors Based on Torque
[J], IEEE Trans. Magnetics. , 2007, 43(1):pp.46–50.
2. Rubaai, A., Ricketts, D. and Kankam, M. D.: Development and Implementation of an
Adaptive Fuzzy-Neural-Network Controller for Brushless Drives [J]. IEEE Transactions on
Industry Applications, 2002, 38(2):pp.441–447.
3. Xia, C., Li, Z. and Shi, T.: A control strategy for four-switch three phase brushless dc motor using single current sensor [J]. IEEE Trans. Ind. Electron, 2009, 56(6):pp.2058–2066.
4. Su, G. J. and Mckeever, J. W.: Low-cost sensorless control of brushless DC motors with improved speed range [J]. IEEE Trans. Power Electron, 2004, 19(2):pp.296–302.
5. Pan, C.T. and Fang, E.: A phase-locked-loop-assisted internal model adjustable-speed controller for BLDC motors [J]. IEEE Trans. Ind. Electron., 2008, 55(9):pp.3415–3425.
6. Sathyan, A., Milivojevic, N., Lee, Y. J. and Krishnamurthy, M., Emadi, A.: An FPGA-based novel digital PWM control scheme for BLDC motor [J], IEEE Trans. Ind. Electron, 2009,
56(8): pp. 3040–3049.
7. Liu, Y., Zhu, Z. Q. and Howe, D.: Commutation torque ripple minimization in direct-torquecontrolled PM brushless dc drives [J]. IEEE Trans. Ind. Electron, 2007, 43(4):pp.1012–1021.
360 Copyright © 2014 SERSC