LEG DESIGN IN HEXAPEDAL RUNNERS
advertisement

J. exp. Biol. 158, 369-390 (1991)
Primed in Great Britain © The Company of Biologists Limited 1991
369
LEG DESIGN IN HEXAPEDAL RUNNERS
BY R. J. FULL 1 , R. BLICKHAN 2 AND L. H. TING 1
1
Department of Integrative Biology, University of California at Berkeley,
Berkeley, CA 94720, USA and 2A. G. Nachtigall, Zoologie,
Universitat des Saarlandes, D-6600 Saarbriicken, Germany
Accepted 22 February 1991
Summary
Many-legged animals, such as crabs and cockroaches, utilize whole-body
mechanics similar to that observed for running bipeds and trotting quadrupedal
mammals. Despite the diversity in morphology, two legs in a quadrupedal
mammal, three legs in an insect and four legs in a crab can function in the same
way as one leg of a biped during ground contact. To explain how diverse leg
designs can result in common whole-body dynamics, we used a miniature force
platform to measure the ground reaction forces produced by individual legs of the
cockroach Blaberus discoidalis. Hexapedal runners were not like quadrupeds with
an additional set of legs. In trotting quadrupedal mammals each leg develops a
similar ground reaction force pattern that sums to produce the whole-body
pattern. At a constant average velocity, each leg pair of the cockroach was
characterized by a unique ground reaction force pattern. The first leg decelerated
the center of mass in the horizontal direction, whereas the third leg was used to
accelerate the body. The second leg did both, much like legs in bipedal runners
and quadrupedal trotters. Vertical force peaks for each leg were equal in
magnitude. In general, peak ground reaction force vectors minimized joint
moments and muscle forces by being oriented towards the coxal joints, which
articulate with the body. Locomotion with a sprawled posture does not necessarily
result in large moments around joints. Calculations on B. discoidalis showed that
deviations from the minimum moments may be explained by considering the
minimization of the summed muscle forces in more than one leg. Production of
horizontal forces that account for most of the mechanical energy generated during
locomotion can actually reduce total muscle force by directing the ground reaction
forces through the leg joints. Whole-body dynamics common to two-, four-, sixand eight-legged runners is produced in six-legged runners by three pairs of legs
that differ in orientation with respect to the body, generate unique ground
reaction force patterns, but combine to function in the same way as one leg of a
biped.
Introduction
Whole-body mechanics in two-, four-, six- and eight-legged runners can be
y words: locomotion, mechanics, muscle, arthropods, Blaberus discoidalis.
370
R. J. F U L L , R. BLICKHAN AND L. H .
TING
remarkably similar, despite variations in body form or morphology (Full, 1989,
1990). Pedestrians that vary in leg number and design can generate similar ground
reaction force patterns. Running humans, trotting dogs, cockroaches and sideways-running crabs can move their bodies by producing alternating propulsive
forces. Two legs in a trotting quadrupedal mammal, three legs in an insect and four
legs in a crab can act as one leg does in a biped during ground contact. The center
of mass of the animal undergoes repeated acceleration and deceleration with each
step, even when traveling at a constant average velocity (Blickhan and Full, 1987;
Cavagna etal. Wll\ Full and Tu, 1990, 1991; Heglund et al. 1982). Horizontal
kinetic energy and gravitational potential energy of the center of mass fluctuate in
phase. Trotting quadrupedal mammals, such as dogs, generate this common
mechanical pattern by producing nearly the same force pattern with each leg
(Alexander, 1977a). In fact, successful trotting quadrupedal robots have been
designed so that the kinetics of each leg is the same, differing only in relative phase
(Raibert et al. 1986). In the present study we test the hypothesis that each of the
three legs of a hexapedal runner functions in a similar manner to produce wholebody mechanics comparable to that of bipedal runners and quadrupedal trotters.
Similarities between mammalian and arthropod whole-body mechanics suggest
that rigid constraints may exist on the possible mechanisms by which a leg can
function during running.
Data from the few studies on the kinetics of terrestrial locomotion in arthropods
do not support the hypothesis that all the legs generate similar ground reaction
force patterns. Unfortunately, because these studies have focused primarily on
questions dealing with neural function, few investigations have correlated kinematics (i.e. description of stepping patterns) with the actual kinetics of locomotion
(Delcomyn, 1985). Moreover, most investigations have examined animals moving
at very low speeds.
Three-dimensional ground reaction force vectors for the legs of standing and
slowly walking spiders differ depending on the leg measured (Blickhan and Barth,
1985; R. Blickhan, unpublished data). Legs four and five of rock lobsters walking
under water also produce unique force patterns (Clarac and Cruse, 1982; Cruse
et al. 1983). Leg four appears to control movement, whereas leg five functions as a
strut. In crayfish, leg three exerts the largest vertical force, whereas leg four
produces most of the propulsive force (Klarner and Barnes, 1986). Cruse (1976)
demonstrated that pro-, meso- and metathoracic legs in a walking stick insect each
generate a distinct ground reaction force pattern. Harris and Ghiradella (1980)
used a photoelastic substratum to estimate the magnitude of vertical force and the
direction of total force at the tarsus of each leg in crickets. Vertical force patterns
are distinct in the second and third legs.
Hughes (1952) proposed a simple model for the function of insect legs. Legs
could function as levers, inclined struts or both simultaneously, depending on the
direction of the ground reaction force vector. A leg functions as a strut if the
ground reaction force vector is directed back towards the joint. If a significant
horizontal accelerating force directs the ground reaction force in an anterior
Insect leg function
371
direction, then the leg functions as a lever in the horizontal direction. Hughes
(1952) reported that the first leg of cockroaches functions as a lever, while the
second and third legs function as inclined struts. Yet the legs of stick insects do not
appear to follow this simple model (Cruse, 1976). First and second legs in stick
insects can act as levers or inclined struts, depending on the direction considered.
Graham (1983) related these single-leg force patterns to changes in whole-body
velocity. He concluded that the mechanics of walking in stick insects is fundamentally different from that of bipeds and quadrupeds. Stick insects employ a lurching
gait during which legs push against one another during a step. The 'unusual
behavior' of the stand-push-recover system was hypothesized to increase energy
cost significantly.
In the present study we determine three-dimensional ground reaction force
vectors for individual legs of the cockroach Blaberus discoidalis. More importantly, we attempt to link the kinematics and kinetics of single legs to the wholebody movement of a running hexaped.
Materials and methods
Animals
Blaberus discoidalis (Serville) were obtained from Carolina Biological Supply
Company. The average mass of the animals used was 2.1±0.7g (S.D.). The
cockroaches were individually housed in plastic containers, and given dog food
and water ad libitum.
Force platform
The animals were induced to run on a cardboard surface along a straight running
track (6cm in width). A force platform was placed just below, but not in contact
with, the running track. Two small rectangular holes (20mm in length and 10mm
in width) were cut in the track to expose areas of the force platform at positions
where it was likely that a single leg would contact the ground (i.e. spaced 34mm
apart). Small cardboard pads were glued on these exposed areas of the force
platform so that the running track was flush with the pads attached to the force
platform. The running track was rigid enough to support the weight of the
cockroach without interfering with the force platform signal.
The force platform was sensitive to vertical, horizontal and lateral force
components. The platform was constructed of model airplane plywood and
mounted on four brass beams, which had 24 semi-conductor strain gauges bonded
to spring blades (Full and Tu, 1990). Variation in force across the platform was less
than 7%. Loads in the range 0.001-0.1 N produced a linear response. Forces as
small as 3 % of the animal's body weight could be resolved. Data were corrected
for crosstalk, which ranged from 1 to 13%. The correction coefficients were
determined from readings taken when the platform was loaded with known
l, horizontal and lateral loads. After correction for crosstalk, force signals
372
R. J. F U L L , R. BLICKHAN AND L. H .
TING
were accurate to 1 %. The unloaded natural frequency of the force platform was
400-650 Hz.
The signals from the force platform were amplified (Vishay, Measurements
Group) and sampled by computer (IBM PC/AT) via an analog-to-digital
converter (C-100, Cyborg) at 1000 samples s" 1 . The signals were collected using
data acquisition and analysis software (Discovery, Cyborg) that also digitally
filtered the data (185 Hz Butterworth filter with zero phase shift) and made
baseline corrections.
Video analysis system
Each trial was videotaped at 120 frames s" 1 . Two views were filmed simultaneously by placing a mirror above the track at 45° and filming from the side.
From the videotapes, it was possible to determine which leg had touched the
exposed area of the force platform in each trial. In addition, the three-dimensional
positions of the incident leg, the head and the abdomen of each animal were
digitized into a computer using a motion analysis system (3D version, Peak
Performance Technologies, Inc.). These data allowed calculation of the average
speed of the animal, as well as the relative position of the legs for each trial. Only
trials of constant average velocity (i.e. net changes in velocity did not exceed 20 %)
were analyzed.
Force and position data were synchronized by matching the first video frame
showing ground contact with the initial rise in the force data. The number of video
frames in which a leg was in contact with the ground was in agreement with the
duration of the vertical force recordings to the accuracy of the framing rate of
120 Hz. Only trials during which the animal stepped completely on the force
platform were accepted.
Coordinate system for analysis
Animals were made to run from left to right. Both video and force data were
collected for legs on the right side of the body and analysed using a common
coordinate system. A rectangular coordinate system was chosen such that the
positive x-axis pointed laterally towards the right side of the animal; the _y-axis, or
the horizontal, corresponded with the direction of motion and the z-axis was
directed vertically (Fig. 1). Ground reaction force vectors from the right set of legs
with a negative x, or lateral, component pointed towards the body. A negative y,
or horizontal, component decelerated the body in the direction of motion; a
positive y component accelerated the body. Positive vertical forces indicated the
support of weight. The maximum or minimum magnitudes, or extrema, of the
ground reaction forces are referred to as F L , FH and Fv for the lateral, horizontal
and vertical directions, respectively.
To illustrate the direction of the force vectors, force data were plotted in two
projections, lateral and posterior. These orthogonal views corresponded to the
primary axes of the coordinate system, such that the plane of projection was
always perpendicular to an x, y or z force component (Fig. 1). The posterior
Insect leg function
373
A Coordinate system
Direction of motion
Ground reaction force
B Posterior projection
C Lateral projection
z
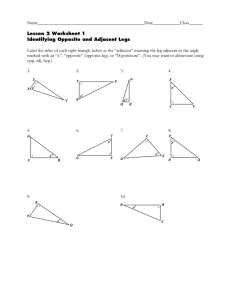
Fig. 1. Coordinate system and projections for ground reaction forces and position
data. (A) Coordinate system. The jc-axis is directed laterally towards the right. The yaxis points along the direction of motion, and the z-axis vertically upwards.
(B) Posterior projection. The actions of the lateral and vertical force components are
resolved. The angle of the projected peak force (S^ was calculated with respect to the
vertical. (C) Lateral projection. The actions of the vertical and horizontal force
components are shown. Angles of peak forces (#2) were calculated with respect to the
vertical.
projection (Fig. IB) illustrates the magnitude and direction of lateral and vertical
forces. The angle of the peak force with respect to the vertical (z-axis) is referred
to as #!• The lateral projection (Fig. 1C) compares the vertical and horizontal
force components where the angle of the peak force with respect to the z-axis is 62All values given in the text are presented as mean ± S.E.
Results
Gait
The average running speed found in 42 force recordings (N=3 animals) was
37.817.5cms" 1 . Cockroaches used an alternating tripod gait. The first and third
legs on one side of the body moved simultaneously with the second leg on the
posite side. Each leg moved 180° out of phase with its contralateral pair.
r
374
R. J. FULL, R. BLICKHAN AND L. H. TING
Prothoracic leg
Force patterns
The force patterns produced by the prothoracic or first leg exhibited single
peaks or extrema (Fig. 2A). F v was 49±3 % of body weight and was always larger
than FH and F L . F H averaged 46±5% of F v and F L averaged 49±2% of F v
iz-
12
A
10-
•
*
10•
8;
Vertical /
•
*
6Force (
z
*
4-
*
*
*
B
2-
Lateral ^ . i " ' ; " ,
o- ******
-2-4-
1
'•%;•.
•
4
Peak
force
4
2
Horizontal "«B
i
-610
20
30
40
Time (ms)
50
60
0
-6
-4
-2
0
Lateral force (mN)
12
-6
- 4 - 2
0
Horizontal force (mN)
2
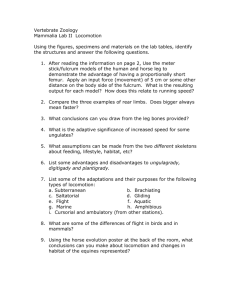
Fig. 2. Prothoracic leg ground reaction force patterns. (A) Lateral, horizontal and
vertical forces as a function of time for one step. (B) Posterior projection. Vertical
force as a function of lateral force during a single step. Arrows indicate the direction of
change with time. At mid-stance, the direction of the ground reaction force was
towards the body of the cockroach during the step at an angle (0,) of 21° from the
vertical. (C) Lateral projection. Horizontal force as a function of vertical force during a
step. At peak force, the angle (62) of the horizontal force with the vertical was -23°. F,
force vector.
Insect leg function
375
Table 1. Average ground reaction force extrema produced by single legs of a
cockroach
Leg
Fv (mN)
FH (mN)
Fh (mN)
Prothoracic
Mesothoracic
Metathoracic
10 .4±0 .6
9 .8±0 .6
11 .9±0 .9
4 .9±0.4
4 .0±0.6
4 .9+0.7
5 .l±0 .4
5 .l±0 .5
3 .2±0 .9
F v , ground reaction force extrema in the vertical direction; FH, ground reaction force extrema
in the horizontal direction; F L , ground reaction force extrema in the lateral direction.
Values are mean ± S.E. 7V=15, 11 and 14 for pro-, meso- and metathoracic legs, respectively.
(Table 1). ,FL showed a significant correlation with Fv (F( 111) =16.6, P=0.002;
r 2 =0.62).
Direction of forces
The vertical ground reaction force component (z) was directed upwards for the
support of weight. No recordings of negative vertical force were measured in any
of the trials. The lateral (x) and horizontal (y) force components were negative
throughout the step, so that the force vector was directed towards the body of the
animal. Vertical forces increased and decreased in proportion to lateral forces, so
that the direction of the force was relatively constant throughout the step
(Fig. 2B). The angle di was —26±1°. In the lateral projection, horizontal force
opposed the direction of motion. The angle 62 for the first leg was —24±2° from
the vertical (Fig. 2C).
Forces relative to body position
Although the forces were relatively constant in direction with respect to the
ground throughout a single step, the direction of the force changed with respect to
the animal's body position. The end of the tarsus stayed in the same position on
the ground throughout the step, but the leg moved with respect to the body, as did
the force vector.
In the lateral projection, the direction of the force vector shifted posteriorly,
reflecting the angular movement of the leg with respect to the body. The force
vector was aligned approximately along the leg, towards the coxal region of the
thorax (Fig. 3A). In the posterior projection, the position of the tarsus did not
move in relation to the body. The force vectors were relatively constant in
direction with respect to the animal and were directed towards the coxa of the first
leg (Fig. 3B).
Mesothoracic leg
Force patterns
The largest force component in the mesothoracic leg of the cockroach was in the
vertical direction, attaining a maximum at near mid-step (Table 2). The vertical
376
R. J. FULL, R. BLICKHAN AND L. H. TING
Lateral projection
\
F
Posterior projection
10
V
(=0ms
t
f=8.3ms
0
10
i
»
t= 16.7 ms
\
(=25 ms
64
20
0
2
4
y
6
i3
10
0
(cm)
2
4
.V
Fig. 3
6
(cm)
10
Insect leg function
311
Fig. 3. Ground reaction forces of the prothoracic leg with respect to body position.
The vertical series of plots shows four combined plots for the force vector (F) and the
positions of the head, abdomen and tarsus of the first leg corresponding to the video
frames for that step. (A) Lateral projection. (B) Posterior projection. Throughout the
step, the force vector was directed towards the body.
Table 2. Single leg peak force phase relationships relative to the duration of vertical
force
Peak force phase
Leg
Prothoracic
Mesothoracic
Metathoracic
Fv
FL
FH_
0.431±0.023
0.404±0.054
0.512+0.054
0.357±0.022
0.376±0.054
0.433±0.051
0.301±0.021
0.226±0.036
FH+
0.640±0.036
0.541±0.042
Values are equal to the time to peak force divided by the duration of the vertical force.
F v represents vertical force; F L represents lateral force; F H _ and FH+ represent horizontal
decelerating and accelerating forces, respectively.
Values are mean ± S.E. N=9, 6 and 13 for pro- meso- and metathoracic legs, respectively.
force pattern often showed a broad maximum compared to the patterns found for
legs one and three (Fig. 4A). Fv was 52±3% of body weight (Table 1). The
horizontal force component was initially decelerating (i.e. F H - , negative) and
then became accelerating (i.e. FH+, positive). FH, the absolute magnitude of F H and FH+, was 41±6% of Fv. At a constant average velocity of the body, the
horizontal force reversed direction at the same time that the vertical force attained
a maximum. However, when the average velocity of the animal was not constant,
the horizontal force did not pass through the origin at mid-stance. Depending on
the amount of whole-body acceleration, FH changed in magnitude and direction.
In contrast to the horizontal force component, the lateral force attained a single
maximum at the same time as the maximum vertical force. Lateral force maxima
were about half the magnitude of the vertical forces: F L =52±4 % of Fv. Again, F L
was significantly correlated with Fv (F (1?9) =9.5, F=0.015; ^=0.54).
Direction of forces
The vertical ground reaction forces were directed upwards. Lateral forces were
directed towards the coxa as in the first leg {6\ = — 23±5°; Fig. 4B). Horizontal
force changed from negative (0 2 =-18±3°; Fig. 4C) to positive (#>=26±5O;
Fig. 4C) during one step.
Forces relative to body position
The direction of the force in the lateral projection changed with the motion of
^ i e leg and the body. The force vector tended to point towards the coxal region
Insect leg function
Lateral projection
10
379
Posterior projection
\
/=0ms (
8
? 6
\
o
"
4
2
0
10
(=8 3 ms
r=16.7ms
(=25 ms
/
10 0
2
4
6
x (cm)
10
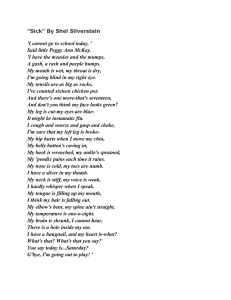
Fig. 5. Ground reaction forces of the mesothoracic leg with respect to body position.
See Fig. 3 for further details.
380
R. J. FULL, R. BLICKHAN AND L. H. TING
iu#
8-
9-
•
*
Vertical ^
6-
zT
4-
8
2-
\>
«
*
S 5£
•
Horizontal •,
*•
Vertical
£
Peak
force
•
0-2-
\
e
' =
\-21«
\ \
,* Lateral
1-
-4-6-
10
20
Time (ms)
30
- 3 - 1
40
-1-7
1
3
Horizontal force (mN)
-5
-3
-1
Lateral force (mN)
1
5
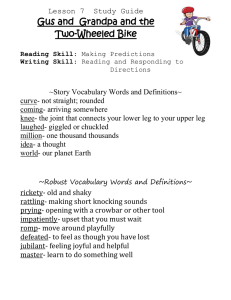
Fig. 6. Metathoracic leg ground reaction force patterns. See Fig. 2 for further details.
the animal's center of mass during a step. Vertical force was the largest force
component (F v =52±2 % of body weight; Fig. 6A; Table 1) exerted by this leg.
Horizontal forces were positive and F H was 41±5% of F v . Lateral forces were
smaller than those measured in the first and second legs (F L =35±3 % of F v ). As in
the other legs, F L was correlated with F v (F (1-14) =12.0, P=0.004; ^=0.48).
Direction of forces
Vertical forces were directed upwards to support weight. Lateral and vertical
ground reaction forces varied in direct proportion and therefore maintained a
relatively constant direction throughout the step (Fig. 6B). Lateral force was
directed towards the body and 0i was —19±1° from the vertical. In general,
horizontal force was accelerating over nearly the entire period of ground contact
Insect leg function
381
and directed towards the center of mass in the direction of motion (#2=23±3°;
Fig. 6C). This leg sometimes exerted a small decelerating force at limb touchdown and lift-off (see Figs 6C and 8).
Forces relative to body position
The lateral projection of the force and position data showed that, at maximum
magnitude, the force vector was not aligned precisely along the leg, but was
directed somewhat posteriorly to the coxa (Fig. 7A). As the magnitude of the
force decreased, the force vector was directed more posteriorly through the
abdomen. The posterior projection showed a pattern similar to that observed in
the first and second legs. Forces were directed towards the center of mass
throughout the step (Fig. 7B).
Comparison of forces among legs
For all legs, F v was correlated with body weight (F (1>39) =28, P<0.001) and
showed no significant variation with respect to speed (F( 2;39 )=1.4, P=0.24). The
magnitude of F v did not differ among the legs (F ( 1 3 9 ) =1.4, P=0.3; Table 1).
Although the force data could not be collected simultaneously for more than one
leg in a tripod, trials were acquired during which all three legs stepped upon the
force platform in succession while the insects traveled at a uniform average
velocity. From such trials, it was evident that F v was equal in magnitude across the
legs in a tripod (Fig. 8). Total vertical force exerted by all legs was 1.5 times body
weight. F v and F L were not a function of speed (F (1;39 )=1.4, P=0.24 and
F(ij39) = 1.7, P=0.24 for F v and F L , respectively).
With respect to the timing of peak force generation, F v and F L were attained
simultaneously in all three legs of the tripod (F (2;27) =0.31, P=0.31 and
F(2,26)=0.85, P=0.44 for F v and F L , respectively; Table 2). Peak horizontal
accelerating force (F H +) in leg three preceded FH+ in the second leg (Scheffe
F-test, P<0.05). Peak horizontal decelerating force (F H _) in leg two preceded
F H - in the first leg (Scheffe F-test, P<0.05). Peak horizontal decelerating force
(F H _) in leg one preceded F H + in the third leg (Scheffe F-test, F<0.05).
Discussion
Gait
The six-legged cockroach B. discoidalis used an alternating tripod gait similar to
other symmetrical gaits (Delcomyn, 1971, 1981). Kinematic data show that the
right front, left middle and right hindlegs contact the ground at nearly the same
time and alternate with the left front, right middle and left hindlegs. Even though
an aerial phase is absent, this gait has been characterized as a running or bouncing
gait (Full and Tu, 1990, 1991). The center of mass of the animal undergoes
repeated accelerations and decelerations with each step, even when it travels at a
constant average velocity. Horizontal kinetic energy and gravitational potential
• n e r g y of the center of mass fluctuate in phase, just as they do in running bipeds
382
R. J. FULL, R. BLICKHAN AND L. H. TING
Sst
Lateral projection
10
"
Posterior projection
<=0ms
4-
7
%
2-
0
10
1=8.3 ms
~ 4.
2-
(=16.7ms
ezXZZ-hzxzSr— -
(=25 ms
\
42-
0
0
2
4
6
_v (cm)
10
0
2
4
6
.v (cm)
10
Fig. 7. Ground reaction forces of the metathoracic leg with respect to body position.
See Fig. 3 for further details.
Insect leg function
383
15.0
Legl
Leg 3
Leg 2
10.0-
z
5.0-
E
-5.0-
Horizontal
-10.0'
50
100
150
Time (ms)
Fig. 8. Ground reaction forces from three legs stepping on the force platform in
succession. The forceprint is from a single trial in which the first (prothoracic), second
(mesothoracic) and third (metathoracic) legs stepped on the plate in succession.
Vertical forces from each of the three legs were the same in magnitude.
and in trotting quadrupedal mammals (Cavagna et al. 1964, 1977; Heglund et al.
1982) and crabs (Blickhan and Full, 1987). Although cockroaches moved their
center of mass with two sets of alternating tripods, the present data clearly show
that six-legged runners cannot be characterized as merely quadrupeds with an
additional set of legs. Each leg in the cockroach generated a unique ground
reaction force pattern.
Magnitude and direction of single leg forces
The prothoracic leg of B. discoidalis acted as a brake in the horizontal direction
(Figs 2 and 3). Accelerating or pulling forces were not observed. At the same time,
the first leg generated a vertical force comparable to that measured in the other
two legs (Table 1). The line of action of the three-dimensional ground reaction
force vector pointed from the tarsus on the ground posteriorly towards the coxa.
Contrary to the hypothesis of Hughes (1952), the leg functioned more as an
inclined strut than as a lever.
The prothoracic leg's vertical force pattern was similar to that produced by the
leg of a running biped or trotting quadruped. The shape of the vertical force
pattern can be described by a modified Fourier series with a shape factor
designated as q, where vertical force=a[cos(;rf/7)—qcos{2>Jtt/T)] from the time a
leg is set down (-T/2) to when it is lifted (+T/2) (Alexander and Jayes, 1978),
fc'here a is a constant and t is time. The shape factor describing the prothoracic
384
R. J. F U L L , R. BLICKHAN AND L. H .
TING
leg's vertical force pattern (<?=—0.1 to 0; duty factor=0.5) corresponds to a run or
trot when compared with two- and four-legged mammals. Shape factors of 0.2-0.5
describe a walk, which is characterized by a minimum approximately half-way
through ground contact time with maxima both before and after.
The prothoracic leg's horizontal force pattern was different from that seen in the
foreleg of a trotting quadruped, such as a dog, despite the fact that whole-body
ground reaction force patterns can be similar in six- and four-legged runners
(Alexander, 1977a; Full and Tu, 1990, 1991). The foreleg of a dog generates a
decelerating horizontal force followed by an accelerating force. Only during a
gallop or bound do the dog's forelegs function as in the cockroach, producing
primarily decelerating forces (Cavagna et al. 1977; Heglund et al. 1982). Blickhan
and Full (1987) found that the leading legs of sideways-running crabs also generate
decelerating forces only.
Previous studies on arthropods have only measured single-leg ground reaction
forces during slow locomotion. In contrast to B. discoidalis, the first leg in walking
stick insects (Cruse, 1976), crickets (Harris and Ghiradella, 1980) and spiders
(Blickhan and Barth, 1985) has been described as performing a 'feeler' function,
resulting in vertical forces that vary greatly. Nevertheless, the first leg in stick
insects was also found to decelerate the center of mass during slow walking (Cruse,
1976). Although the first leg in B. discoidalis may perform a sensory function at
very low speeds, when locomotion is intermittent, the forces recorded in the
present study were very consistent during running.
Forces in the mesothoracic legs of B. discoidalis were similar to the ground
reaction forces generated by the leg of a running biped or trotting quadruped
(Fig. 4). Vertical forces attained a maximum at mid-stance and were the largest
force component (Table 1). Horizontal forces acted first to decelerate and
subsequently to accelerate the body (i.e. force changed direction from negative to
positive at mid-stance; Fig. 5). Although the mesothoracic legs are acting as
inclined struts, the present results do not support the hypothesis that the
mesothoracic legs always assist forward movement (Hughes, 1952).
The mesothoracic leg's vertical force pattern had a single maximum and a shape
factor similar to or somewhat greater than that of the prothoracic leg and that
produced by the leg of a running biped or trotting quadruped (q=0 to 0.1). The
vertical force pattern was not similar to that found in a stiff-legged walking gait, in
which two maxima have been measured (Cavagna et al. 1977). By contrast,
crickets may employ a stiff-legged walk, since the vertical force pattern of the
mesothoracic leg shows a distinct 'dip' at mid-stance (q=0.2-0.3; Harris and
Ghiradella, 1980). However, not all the legs of the cricket show this pattern.
Moreover, slowly walking stick insects generate vertical force patterns with a
single maximum (Cruse, 1976).
Metathoracic legs of B. discoidalis tended to accelerate the center of mass,
because horizontal ground reaction forces were directed towards the body (Figs 6
and 7). A comparable action for hindlegs has been described for a wide variety of
animals, such as stick insects (Cruse, 1976) and spiders during slow walking
Insect leg function
385
(Blickhan and Barth, 1985), crabs running (Blickhan and Full, 1987) and many
quadrupedal mammals bounding (Cavagna et al. 1977; Heglund etal. 1982). The
third leg of B. discoidalis also generated a vertical force comparable to that
measured in legs one and two (Table 1). The metathoracic leg's vertical force
pattern had a single maximum and a shape factor similar to that produced by the
leg of a running biped or trotting quadruped. The third leg functioned as an
inclined strut, but, as pointed out by Hughes (1952), it was also capable of actively
developing axial forces.
Implications for leg design
Examination of the ground reaction force patterns of the six-legged B. discoidalis raises two fundamental mechanistic questions dealing with leg design for
terrestrial locomotion. First, why do animals traveling at a constant average speed
generate significant horizontal ground reaction forces? Energy fluctuations of the
center of mass could be reduced considerably if horizontal ground reaction forces
were decreased. Full and Tu (1991) found that 60-80 % of the mechanical energy
of the center mass in the rapid running cockroach Periplaneta americana can be
accounted for by accelerations of the center of mass in the horizontal direction.
The horizontal ground reaction forces generated by B. discoidalis, relative to F v ,
are 2-4 times that measured in terrestrial birds and mammals (Alexander, 1977a;
Biewener, 1983; Biewener etal. 1988; Cavagna etal. 1977; Heglund et al. 1982).
Lateral ground reaction forces are even greater in magnitude relative to F v
(Alexander, 1911a). Second, why do the legs of cockroaches, and probably other
arthropods with sprawled postures, operate against one another during ground
contact? Leg forces that oppose each other would appear to increase the total
force required from leg muscles.
Alexander (1971b) has argued that for bipeds inclusion of horizontal forces
actually decreases mechanical work and metabolic cost. We propose that
horizontal ground reaction force production can minimize joint moments and
muscle forces in a leg. More importantly, we suggest that total force can be
minimized, even when legs push against one another.
Consider a simple planar model of B. discoidalis in a lateral projection (Fig. 9).
Musculo-skeletal forces at the joints will be decreased if the moments around the
joints are minimized. A moment is denned by the product of the lever arm, or
distance vector, and the resultant force vector. Thus, to decrease the moment,
either the magnitude of the ground reaction force can be decreased or the
direction of the force can be altered. In B. discoidalis, the largest force component
produced by each leg was in the vertical direction. Despite the disparity in leg size
and position, F v at each leg was the same (Table 1). The large forces imposed
upon the legs for the support of weight create large moments about the joints,
because the vertical forces are exerted at the most distal point of legs which radiate
out from underneath the thorax. Fig. 9 shows the long moment arm associated
with the vertical ground reaction force for the joints of the third leg. The moment
generated about each joint must be balanced by an opposing musculo-skeletal
386
R. J. FULL, R. BLICKHAN AND L. H. TING
Fig. 9. Diagram of a lateral projection representing the relationship of ground
reaction forces, joint positions and lever arms for the prothoracic and metathoracic legs
of a cockroach during ground contact. Ground reaction forces (solid arrows) and
moment arms (R) are resolved into vertical (V) and horizontal (H) components.
Vertically directed forces (F v ) without horizontal components generate large moments
(FVX/?V) about each joint, which must be balanced with large muscle forces owing to
the small muscle lever arms. Moments become zero when the force vector is directed
through the joint. This simple planar model only considers the joint motion in the plane
of the lateral projection. Future three-dimensional quantitative models should include
the major axis of rotation for each joint and the contribution of passive forces. C-T and
F-T represent coxa-trochanter and femur-tibia, respectively.
force 20-30 times that of the body weight because the muscle levers arms are
relatively short. Fig. 10A shows estimated moments about the coxa-trochanter
and femur-tibia joint for the third and first legs in a lateral projection.
If we assume that the vertical force component (F v ) is constant, then the ground
reaction force vector will be more in line with the joint when a horizontal force
(F H ) is applied (Fig. 9). Joint moments and muscle forces will decrease as
horizontal force increases from zero (Fig. 10A). The higher the joint is off the
ground, the lower the magnitude of the horizontal force required, because the
moment arm associated with the horizontal force (i.e. RH) is simply the distance
from the ground to the joint. Joint moments will attain a minimum when the
Fig. 10. Estimated joint moments and musculo-skeletal forces for the prothoracic and
metathoracic legs of a cockroach during ground contact as a function of the magnitude
of the horizontal component of ground reaction force. (A) Joint moments generated
by the ground reaction force at the tarsus around the coxa-trochanter (C-T, solid line)
and femur-tibia (F-T, dashed line) joints of the prothoracic leg and the coxa-trochanter (dash-dot line) and femur-tibia (dashed-double-dot line) joints of the
metathoracic leg. (B) Summed joint moments around the coxal and femur joints of the
prothoracic and metathoracic legs generated by the ground reaction force at the tarsus.
(C) Total muscle force necessary to balance the moments around the coxa-trochanter
and femur-tibia joints of the prothoracic and metathoracic leg generated by the ground
reaction force at the tarsus. Muscle lever arms were estimated for each joint by
measurement with a dissecting microscope. Note that the total muscle force function
differs from the summed moment curve because the extensor and flexor muscle lever
arms differ in each joint. Joints with small muscle lever arms require greater muscle
force production than those with large lever arms.
Insect leg function
387
ground reaction force vector is directed through the joint's center. If horizontal
force is increased further, then the vector will be directed to the opposite side of
the joint and the moment will increase. In general, horizontal forces resulted in the
ground reaction force vector pointing towards the coxa of the animal when the
force attained a maximum (Figs 3A, 5A and 7A). At the beginning and end of
each step, when the force was directed furthest away from the coxa joint, moments
were quite small because the forces generated at this time were small. In many
birds and mammals the ground reaction force vector of the lateral projection tends
to remain aligned with the leg, passing close to the hip to minimize the moment
5 OxlO"4
Leg 1 C-T joint
4.OxlO~4
Z 3.0X10"4
c
§ 2.0xl0" 4
l.OxlO"4
0.0
E
Z
c
8X10"4"1
6x10"
o
f
4x10"
0.6-
o
0.5-
0.4-
0.3-0.01 -0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07
Horizontal ground reaction force (N)
Fig. 10
388
R. J. F U L L , R. BLICKHAN AND L. H .
TING
developed at the limb joints (Alexander, 1977a; Biewener, 1983; Biewener etal.
1988).
Because the legs of birds and mammals are placed underneath the body, the
ground reaction force vector is oriented near the vertical in the posterior
projection. By contrast, the legs of a cockroach are positioned laterally. A ground
reaction force vector oriented near the vertical without corresponding lateral
forces directed towards the body would result in large moments being developed
at the coxal joints. In B. discoidalis, moments are minimized with respect to the
posterior projection (Figs 3B, 5B and 7B). Addition of a significant lateral force
caused the resultant force to be directed along the leg in this projection as well.
This dependence of F L on F v reduced the moments around the joints and
decreased muscle forces. Compared to the generation of strictly vertical ground
reaction forces, the production of horizontal and lateral forces by B. discoidalis
actually reduces joint moments and total muscle force.
Although the resultant force vectors are generally directed towards the coxa, we
found significant deviations from this position. The resultant force vector in the
lateral projection for the metathoracic leg was directed above and behind the
joints (Figs 7A, 9). Horizontal ground reaction forces were smaller in magnitude
than predicted for the resultant to be simply oriented to minimize joint moments of
the hindleg alone. Horizontal forces 5-10 times higher than observed would be
required to minimize metathoracic leg joint moments. For an animal traveling at a
constant speed, these large accelerating forces must be balanced to some extent by
comparable horizontal decelerating forces of the prothoracic leg. Because the
metathoracic and prothoracic legs of B. discoidalis are not equidistant from the
point of ground contact, large decelerating forces of the prothoracic leg would, in
turn, cause greatly elevated moments and muscle forces in the prothoracic leg
joints. Closer examination of the joint moments shows that the magnitude of the
horizontal ground reaction force corresponding to the minimum joint moment
differs among individual joints and legs (Fig. 10A). Perhaps the summed moment
of all joints in the metathoracic and prothoracic legs is minimized rather than the
moment of individual leg joints. Fig. 10B shows that the total or summed moment
(M tot =2|Mi|, where M, represents the moments of the individual joints) balanced
by muscle force attained a minimum at 0.01 N. To make a better estimate of the
total muscle force production for the coxa-trochanter and femur-tibia joints of
the metathoracic and prothoracic legs, we used approximations of muscle lever
arms, since extensor and flexor lever arms vary for each joint (Fig. IOC).
Remarkably, the measured horizontal forces would require muscle forces only
12 % greater than the predicted minimum value. Depending on the leg design, legs
that push against one another and generate accelerating and decelerating ground
reaction forces can actually result in a lower total muscle force production than if
only vertical ground reaction forces are generated.
Single-leg forces compared to whole-body ground reaction forces
When the ground reaction forces from single legs in the alternating tripods of
Insect leg function
389
B. discoidalis are summed, the resultant is consistent with whole-body force
recordings (Full and Tu, 1990). Lateral forces cancel in such a manner that the
resultant force is smaller than any single-leg force component and points towards
the side of the second leg of the tripod. Kinematics alone would suggest that the
second leg accelerates and decelerates the center of mass, since the horizontal
forces of the first and third legs would cancel. However, the kinetics revealed a
somewhat different picture. The peak decelerating horizontal force (F H _) of the
first leg occurs earlier in the step than the peak accelerating horizontal force (FH+)
of the third leg (Table 2). Therefore, the first, second and third legs all play a role
in moving the center of mass in the horizontal direction.
Each leg pair of a hexapedal runner performs a unique function during
terrestrial locomotion. Horizontal accelerating and decelerating ground reaction
forces can minimize muscle force production while significantly increasing the
mechanical power used to move the center of mass. Legs are not constrained to
operate in a mechanically identical fashion when using a symmetrical gait. Wholebody dynamics common to two-, four-, six- and eight-legged runners (Full, 1989,
1990) is produced in six-legged runners by a set of three legs that differ in design
from, but function in the same way as, one leg of a biped.
We thank Michael Tu for his initial work on this project and Andy Biewener for
his critrial reading of the manuscript. Supported by NSF grant DCB 89-04586 and
a Presidential Undergraduate Fellowship to L.H.T.
References
ALEXANDER, R. MCN. (1977a). Terrestrial locomotion. In Mechanics and Energetics of Animal
Locomotion (ed. R. McN. Alexander and T. Goldspink), pp. 168-203. New York: Wiley &
Sons.
ALEXANDER, R. MCN. (19776). Mechanics and scaling of terrestrial locomotion. In Scale Effects
in Animal Locomotion (ed. T. J. Pedley), pp. 93-110. London: Academic Press.
ALEXANDER, R. AND JAYES, A. S. (1978). Vertical movements in walking and running. J. Zooi,
Land. 185, 27-40.
BIEWENER, A. A. (1983). Locomotory stresses in the limb bones of two small mammals: the
ground squirrel and the chipmunk. /. exp. Biol. 103, 131-154.
BIEWENER, A. A., THOMPSON, J. J. AND LANYON, L. E. (1988). Mechanics of locomotion and
jumping in the horse (Equus): in vivo stress in the tibia and metatarsus. J. Zooi, Lond. 214,
547-565.
BLICKHAN, R. AND BARTH, F. G. (1985). Strains in the exoskeletons of spiders. /. comp. Physiol.
157, 115-147.
BLICKHAN, R. AND FULL, R. J. (1987). Locomotion energetics of the ghost crab. II. Mechanics of
the center of mass during walking and running. /. exp. Biol. 130, 155-174.
CAVAGNA, G. A., HEGLUND, N. C. AND TAYLOR, C. R. (1977). Mechanical work in terrestrial
locomotion: Two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233,
R243-R261.
CAVAGNA, G. A., SAIBENE, F. P. AND MARGARIA, R. (1964). Mechanical work in running. J. appl.
Physiol. 19, 249-256.
CLARAC, F. AND CRUSE, H. (1982). Comparison offerees developed by the leg of the rock lobster
when walking free or on a treadmill. Biol. Cybernetics 43, 109-114.
CRUSE, H. (1976). The function of legs in the free walking stick insect, Carausius morosus.
J. comp. Physiol. 112, 135-162.
390
R. J. FULL, R. BLICKHAN AND L. H. TING
CRUSE, H., CLARAC, F. AND CHASSERAT, C. (1983). The control of walking movements in the leg
of the rock lobster. Biol. Cybernetics 47', 87-94.
F. (1971). The locomotion of the cockroach Periplaneta americana. J. exp. Biol. 54,
443-452.
DELCOMYN, F. (1981). Insect locomotion on land. In Locomotion and Energetics in Arthropods
(ed. C. F. Herreid and C. R. Fourtner), pp. 103-125. New York: Plenum Press.
DELCOMYN, F. (1985). Insect locomotion: past, present and future. In Insect Locomotion (ed.
M. Gewecke and G. Wendler), pp. 1-18. Berlin: Paul Parey.
FULL, R. J. (1989). Mechanics and energetics of terrestrial locomotion: From bipeds to
polypeds. In Energy Transformation in Cells and Animals (ed. W. Wieser and E. Gnaiger),
pp. 175-182. Stuttgart: Thieme.
FULL, R. J. (1990). Concepts of efficiency and economy in land locomotion. In Efficiency and
Economy in Animal Physiology (ed. R. W. Blake). New York: Cambridge University Press
(in press).
FULL, R. J. AND TU, M. S. (1990). The mechanics of six-legged runners. J. exp. Biol. 148,
129-146.
FULL, R. J. AND TU, M. S. (1991). Mechanics of rapid running insects: two-, four-, and sixlegged locomotion. J. exp Biol. 156, 215-231.
GRAHAM, D. (1983). Insects are both impeded and propelled by their legs during walking. J. exp.
Biol. KM, 129-137.
HARRIS, J. AND GHIRADELLA, H. (1980). The forces exerted on the substrate by walking and
stationary crickets. /. exp. Biol. 85, 263-270.
HEGLUND, N. C , CAVAGNA, G. A. AND TAYLOR, C. R. (1982). Energetics and mechanics of
terrestrial locomotion. LU. Energy changes of the centre of mass as a function of speed and
body size in birds and mammals. J. exp. Biol. 79, 41-56.
HUGHES, G. M. (1952). The co-ordination of insect movements. I. The walking movements of
insects. /. exp. Biol. 29, 267-285.
KLARNER, D. AND BARNES, J. P. (1986). The cuticular stress detector (CSD2) of the crayfish. II.
Activity during walking and influences on leg coordination. J. exp. Biol. 122, 161-175.
RAIBERT, M. H., CHEPPONIS, M. AND BROWN, B., JR (1986). Running on four legs as though they
were one. IEEE J. Rob. Auto. RA-2, 70-82.
DELCOMYN,