Lecture Notes
advertisement

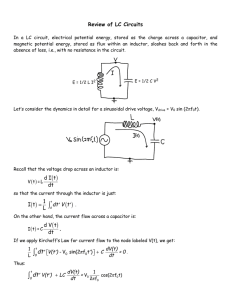
PH 222-2C Fall 2012 Electromagnetic Oscillations and Alternating Current Lectures 18-19 Chapter 31 (Halliday/Resnick/Walker, Fundamentals of Physics 8th edition) 1 Chapter 31 Electromagnetic Oscillations and Alternating Current In this chapter we will cover the following topics: -Electromagnetic oscillations in an LC circuit -Alternating current (AC) circuits with capacitors -Resonance in RCL circuits -Power in AC circuits -Transformers, AC power transmission 2 LC Oscillations L C The circuit shown in the figure consists of a capacitor C and an inductor L. We give the capacitor an initial charge Q and then observe what happens. The capacitor will discharge through the inductor, resulting in a timedependent current i. We will show that the charge q on the capacitor plates as well as the current i 1 . LC The total energy U in the circuit is the sum of the energy stored in the electric field in the inductor oscillate with constant amplitude at an angular frequency q 2 Li 2 of the capacitor and the magnetic field of the inductor: U U E U B . 2C 2 dU 0. The total energy of the circuit does not change with time. Thus dt dU q dq di dq di d 2 q d 2q 1 Li 0. i 2 L 2 q0 dt C dt dt dt dt dt dt C 3 d 2q 1 d 2q 1 L 2 q 0 2 q 0 (eq. 1) dt dt C LC C This is a homogeneous, second order, linear differential equation L that we have encountered previously. We used it to describe the simple harmonic oscillator (SHO). q (t ) Q cos t d 2x 2 x 0 (eq. 2) dt 2 With solution: x(t ) X cos(t ) 1 LC If we compare eq. 1 with eq. 2 we find that the solution to the differential equation that describes the LC circuit (eq. 1) is: q (t ) Q cos t The current i where 1 , and is the phase angle. LC dq Q sin t . dt 4 L The energy stored in the electric field of the capacitor: C q2 Q2 cos 2 t UE 2C 2C The energy stored in the magnetic field of the inductor: 2 Li 2 L 2Q 2 Q sin 2 t sin 2 t UB 2 2 2C The total energy U U E U B : Q2 Q2 2 2 U cos t sin t 2C 2C The total energy is constant; energy is conserved. Q2 T 3T The energy of the electric field has a maximum value of at t 0, , T , ,.... 2C 2 2 Q2 T 3T 5T The energy of the magnetic field has a maximum value of at t , , ,.... 2C 4 4 4 Note : When U E is maximum, U B is zero, and vice versa. 5 2 t T /8 3 4 t T /4 t 3T / 8 5 1 t T /2 8 6 t 0 t 7T / 8 1 t 5T / 8 3 7 5 7 2 4 6 8 t 3T / 4 6 Damped Oscillations in an RCL Circuit If we add a resistor in an RL circuit (see figure) we must modify the energy equation, because now energy is dU being dissipated on the resistor: i 2 R. dt dU q dq di q 2 Li 2 Li i 2 R U UE UB 2C 2 dt C dt dt dq di d 2 q d 2q dq 1 i 2 L 2 R q 0. This is the same equation as that dt dt dt dt dt C d 2x dx of the damped harmonics oscillator: m 2 b kx 0, which has the solution: dt dt k b2 x(t ) xm e . cos t . The angular frequency 2 m 4m For the damped RCL circuit the solution is: bt /2 m q (t ) Qe Rt /2 L cos t . The angular frequency 1 R2 2. LC 4 L 7 q (t ) Qe q (t ) Qe Rt / 2 L cos t Rt / 2 L Q q (t ) Q 1 R2 2 LC 4 L Qe Rt / 2 L The equations above describe a harmonic oscillator with an exponentially decaying amplitude Qe Rt /2 L . The angular frequency of the damped oscillator 1 1 R2 2 is always smaller than the angular frequency of the LC LC 4 L R2 1 undamped oscillator. If the term we can use the approximation . 2 4L LC 8 Alternating Current A battery for which the emf is constant generates a current that has a constant direction. This type of current is known as "direct current " or "dc." m sin t In Chapter 30 we encountered a different type of source (see figure) whose emf is: NAB sin t m sin t , where m NAB, A is the area of the generator windings, N is the number of the windings, is the angular frequency of the rotation of the windings, and B is the magnetic field. This type of generator is known as "alternating current" or "ac" because the emf as well as the current change direction with a frequency f 2. In the U.S. f 60 Hz. Almost all commercial electrical power used today is ac even though the analysis of ac circuits is more complicated than that of dc circuits. The reasons why ac power was adapted will be discussed at the end of this chapter. 9 Three Simple Circuits Our objective is to analyze the circuit shown in the figure (RCL circuit). The discussion will be greatly simplified if we examine what happens if we connect each of the three elements (R, C , and L) separately to an ac generator. A Convention From now on we will use the standard notation for ac circuit analysis. Lowercase letters will be used to indicate the L C instantaneous values of ac quantities. Uppercase letters will be used to indicate the constant amplitudes of ac quantities. Example: The capacitor charge in an LC circuit was written as q Q cos t . The symbol q is used for the instantaneous value of the charge. The symbol Q is used for the constant amplitude of q. 10 VR I R R A Resistive Load In fig. a we show an ac generator connected to a resistor R. From KLR we have: iR R 0 iR m sin t. R R The current amplitude is I R m . R The voltage vR across R is equal to m sin t. The voltage amplitude is equal to m . The relation between the voltage and current amplitudes is VR I R R. In fig. b we plot the resistor current iR and the resistor voltage vR as functions of time t. Both quantities reach their maximum values at the same time. We say that voltage and current are in phase. 11 A convenient method for the representation of ac quantities is that of phasors. The resistor voltage vR and the resistor current iR are represented by rotating vectors known as phasors using the following conventions: 1. Phasors rotate in the counterclockwise direction with angular speed . 2. The length of each phasor is proportional to the ac quantity amplitude. 3. The projection of the phasor on the vertical axis gives the instantaneous value of the ac quantity. 4. The rotation angle for each phasor is equal to the phase of the ac quantity (t in this example). 12 2 m 2 m Vrms P 2R 2 Average Power for R T 1 P P (t )dt T 0 m 2 sin 2 t P R T m 2 1 2 n si P tdt R T 0 T 1 1 2 sin td t 2 T 0 m 2 P 2R We define the "root mean square" (rms) value of V as follows: m 2 Vrms Vrms P . The equation looks the same R 2 as in the dc case. This power appears as heat on R. 13 A Capacitive Load In fig. a we show an ac generator connected to a capacitor C. From KLR we have: XC qC 0 C qC C mC sin t O dqC iC mC cos t mC sin t 90 dt 1 X The voltage amplitude VC is equal to m . C C VC The current amplitude is I C CVC . 1/ C The quantity X C 1/ C is known as the capacitive reactance. In fig. b we plot the capacitor current iC and the capacitor voltage vC as functions of time t. The current leads the voltage by a quarter of a period. The voltage and current are out of phase by 90 . 14 Average Power for C PC 0 m 2 P VC I C sin t cos t XC 2sin cos sin 2 T m 2 sin 2t P 2XC T m 2 1 1 sin 2tdt 0 P P (t )dt = T 0 2XC T 0 Note : A capacitor does not dissipate any power on the average. In some parts of the cycle it absorbs energy from the ac generator, but at the rest of the cycle it gives the energy back so that on the average no power is used! 15 An Inductive Load In fig. a we show an ac generator connected to an inductor L. di di From KLR we have: L L 0 L m sin t dt dt L L iL diL m sin tdt m cos t m sin t 90 L L L The voltage amplitude VL is equal to m . XL VL The current amplitude is I L . L The quantity X L L is known as the O inductive reactance. X L L In fig. b we plot the inductor current iL and the inductor voltage vL as functions of time t. The current lags behind the voltage by a quarter of a period. The voltage and current are out of phase by 90 . 16 PL 0 Average Power for L m 2 Power P VL I L sin t cos t XL 2sin cos sin 2 T m 2 P sin 2t 2XL T m 2 1 1 P P (t )dt = sin 2tdt 0 T 0 2X L T 0 Note : An inductor does not dissipate any power on the average. In some parts of the cycle it absorbs energy from the ac generator, but at the rest of the cycle it gives the energy back so that on the average no power is used! 17 SUMMARY Circuit Element Average Power Resistor R PR m 2R Capacitor C Inductor L Reactance 2 PC 0 PL 0 R Phase of Current Current is in phase with the voltage Voltage Amplitude VR I R R 1 XC C Current leads voltage by a quarter of a period IC VC I C X C C X L L Current lags behind voltage by a quarter of a period VL I L X L I L L 18 The Series RCL Circuit An ac generator with emf m sin t is connected to an in-series combination of a resistor R, a capacitor C , and an inductor L, as shown in the figure. The phasor for the ac generator is given in fig. c. The current in i I sin t this circuit is described by the equation: i I sin t . The current i is common for the resistor, the capacitor, and the inductor. The phasor for the current is shown in fig. a. In fig. b we show the phasors for the voltage vR across R, the voltage vC across C , and the voltage vL across L. The voltage vR is in phase with the current i. The voltage vC lags behind the current i by 90. The voltage vL leads ahead of the current i by 90. 19 A B i I sin t Z R2 X L X C O I 2 m Z Kirchhoff's loop rule (KLR) for the RCL circuit: vR vC vL . This equation is represented in phasor form in fig. d . Because VL and VC have opposite directions we combine the two in a single phasor VL VC . From triangle OAB we have: 2 2 2 2 m2 VR2 VL VC IR IX L IX C I 2 R 2 X L X C m . The denominator is known as the "impedance" Z I 2 2 R X L XC of the circuit. I Z R 2 X L X C The current amplitude I 2 m 1 R2 L C 2 m . Z . 20 i I sin t 1 XC C A B Z R2 X L X C tan O X L XC R X L L From triangle OAB we have: tan 2 VL VC IX L IX C X L X C . VR IR R We distinguish the following three cases depending on the relative values of X L and X C . 1. X L X C 0 The current phasor lags behind the generator phasor. The circuit is more inductive than capacitive. 2. X C X L 0 The current phasor leads ahead of the generator phasor. The circuit is more capacitive than inductive. 3. X C X L 0 The current phasor and the generator phasor are in phase. 21 1. Figs. a and b: X L X C 0 The current phasor lags behind the generator phasor. The circuit is more inductive than capacitive. 2. Figs. c and d : X C X L 0 The current phasor leads ahead of the generator phasor. The circuit is more capacitive than inductive. 3. Figs. e and f : X C X L 0 The current phasor and the generator phasor are in phase. 22 1 LC I res m R Resonance In the RCL circuit shown in the figure, assume that the angular frequency of the ac generator can be varied continuously. The current amplitude in the circuit is given by the equation m . The current amplitude I 2 1 R2 L C 1 has a maximum when the term L 0. C 1 This occurs when . LC m . R A plot of the current amplitude I as a function of is shown in the lower figure. The equation above is the condition for resonance. When it is satisfied, I res This plot is known as a "resonance curve." 23 2 Pavg I rms R Pavg I rmsrms cos Power in an RCL Circuit We already have seen that the average power used by a capacitor and an inductor is equal to zero. The power on the average is consumed by the resistor. The instantaneous power P i 2 R I sin t R. 2 T The average power Pavg 1 Pdt. T 0 1 T I 2R 2 2 Pavg I R sin t dt R I rms 2 T 0 R Pavg I rms RI rms I rms R rms I rmsrms I rmsrms cos Z Z The term cos in the equation above is known as the "power factor" of the circuit. The average 2 power consumed by the circuit is maximum when 0. 24 I VR VL =‐40 VC‐VL VC tan=(XL‐XC)/R=(188‐442)/300=‐0.847 =‐ 40.3 25 m Transmission lines rms =735 kV , I rms = 500 A Step-down transformer 110 V Step-up transformer T1 Home R = 220Ω T2 1000 km Power Station Energy Transmission Requirements The resistance of the power line R Heating of power lines Pheat . R is fixed (220 in our example). A 2 I rms R. This parameter is also fixed (55 MW in our example). Power transmitted Ptrans rms I rms (368 MW in our example). In our example Pheat is almost 15 % of Ptrans and is acceptable. To keep Pheat we must keep I rms as low as possible. The only way to accomplish this is by increasing rms . In our example rms 735 kV. To do that we need a device that can change the amplitude of any ac voltage (either increase or decrease). 26 The Transformer The transformer is a device that can change the voltage amplitude of any ac signal. It consists of two coils with a different number of turns wound around a common iron core. The coil on which we apply the voltage to be changed is called the "primary" and it has N P turns. The transformer output appears on the second coil, which is known as the "secondary" and has N S turns. The role of the iron core is to ensure that the magnetic field lines from one coil also pass through the second. We assume that if voltage equal to VP is applied across the primary then a voltage VS appears on the secondary coil. We also assume that the magnetic field through both coils is equal to B and that the iron core has cross-sectional area A. The magnetic flux dP dB (eq. 1). NP A through the primary P N P BA VP dt dt dS dB The flux through the secondary S N S BA VS (eq. NS A 27 2). dt dt VS V P NS NP dP dB NP A (eq. 1) dt dt dS dB S N S BA VS NS A (eq. 2) dt dt If we divide equation 2 by equation 1 we get: P N P BA VP dB NS A VS dt N S VS VP . VP N A dB NP NS NP P dt The voltage on the secondary VS VP NS . NP If N S N P NS 1 VS VP , we have what is known as a "step up" transformer. NP If N S N P NS 1 VS VP , we have what is known as a "step down" transformer. NP Both types of transformers are used in the transport of electric power over large distances. 28 IS IP VS V P NS NP IS NS IP NP VS VP We have that: NS NP VS N P VP N S (eq. 1). If we close switch S in the figure we have in addition to the primary current I P a current I S in the secondary coil. We assume that the transformer is "ideal, " i.e., it suffers no losses due to heating. Then we have: VP I P VS I S If we divide eq. 2 with eq. 1 we get: IS (eq. 2). V I VP I P S S IP NP IS NS . VP N S VS N P NP IP NS In a step-up transformer (N S N P ) we have that I S I P . In a step-down transformer (N S N P ) we have that I S I P . 29