Bifurcations - College of Science and Mathematics
advertisement

Bifurcations
S. F. Ellermeyer
September 18, 2001
1
Classi¯cation of Equilibria
We continue to study autonomous di®erential equations of the form
dy
= f (y)
(1)
dt
under the assumptions that the function f on the right hand side of (1) is
de¯ned for all y 2 (¡1; 1) and that f and f 0 are continuous functions of
y. Given some y0 2 (¡1; 1), we will denote the solution of the initial value
problem
dy
= f (y)
dt
y(0) = y0
(2)
by y(t; y0) and denote the maximal interval of existence of this solution by
I (y0 ). A real number y is said to be an equilibrium point (or equilibrium
value) of the di®erential equation (1) if f (y) = 0. If y is an equilibrium point
of (1), then y (t; y) = y with maximal interval of existence I (y) = (¡1; 1).
We want to study the e®ects of varying a parameter that might be used in
de¯ning the function f(y) { speci¯cally to study how changing the parameter
changes the qualitative nature of the family of solutions. We begin by giving
some de¯nitions used to classify equilibrium points and by stating a theorem
that provides an easy criterion for determining the types of some equilibria.
De¯nition 1 An equilibrium point, y, of the di®erential equation dy=dt =
f (y) is said to be isolated if there is an open y{interval, N, containing y
such that N contains no equilibrium points other than y.
1
De¯nition 2 An equilibrium point, y, of the di®erential equation dy=dt =
f (y) is said to be a sink if y is isolated and there exists an open y{interval,
N, containing y such that if y0 is any point in N then limt!1 y (t; y0) = y.
De¯nition 3 An equilibrium point, y, of the di®erential equation dy=dt =
f (y) is said to be a source if y is isolated and there exists an open y{interval,
N, containing y such that if y0 is any point in N then limt!¡1 y (t; y0 ) = y.
De¯nition 4 An equilibrium point, y, of the di®erential equation dy=dt =
f (y) is said to be a node if y is neither a sink nor a source.
To illustrate the above de¯nitions, we return to one of our favorite examples { the di®erential equation
dy
= ky:
dt
(3)
If k < 0, then y = 0 is the only equilibrium point of the di®erential equation
(3) and the phase line for (3) is as pictured in Figure 1a. Since limt!1 y(t; y0 ) =
0 in this case (no matter what initial value y0 we choose), then clearly y = 0
is a sink if k < 0.
If k > 0, then y = 0 is again the only equilibrium point and in this case
the phase line is as pictured in Figure 1c. Since limt!¡1 y(t; y0 ) = 0 in this
case (no matter what initial value y0 we choose), then clearly y = 0 is a
source if k > 0.
2
Finally, if k = 0 then equation (3) is simply
dy
=0
dt
(4)
and every point is an equilibrium point of (4). Each of these in¯nitely many
equilibria is a node. (Why?) The phase line of equation (4) is shown in
Figure 1.b.
The following theorem gives a criterion for classifying equilibria.
Theorem 5 Suppose that y is an equilibrium point of the di®erential equation dy=dt = f (y) and suppose that f 0 (y) 6= 0.
1. If f 0 (y) < 0, then y is sink.
2. If f 0 (y) > 0, then y is a source.
Let us now consider two examples that demonstrate the use of Theorem
5.
Example 6 Consider the di®erential equation
dy
= y + y 2:
dt
(5)
The equilibrium points of (5) are y1 = 0 and y 2 = ¡1. Also, f 0 (y) = 1 + 2y
which implies that
f 0 (y1 ) = f 0 (0) = 1 > 0
and
f 0 (y 2) = f 0 (¡1) = ¡1 < 0:
Theorem 5 tells us that y1 = 0 is a source and that y2 = ¡1 is a sink. The
3
phase line for (5) is as shown in Figure 2.
Example 7 Consider the di®erential equation
dy
= sin(¼y):
dt
(6)
Every integer, n, is an equilibrium point of (6). We can label these as y n = n.
Since f 0 (y) = ¼ cos(¼y) we have
f 0 (yn ) = f 0 (n) = ¼ cos (n¼) = ¼ > 0 if n is even
and
f 0 (y n ) = f 0 (n) = ¼ cos (n¼) = ¡¼ < 0 if n is odd.
Hence y n is a sink if n is odd and a source if n is even. A partial phase line
4
of the di®erential equation (6) is shown in Figure 3.
Exercise 1.1 Clearly, y = 0 is the only equilibrium of the di®erential equation
y
dy
= 2
:
(7)
dt
y +1
Use Theorem 5 to determine whether y is a sink or a source and then draw
the phase line for (7).
Exercise 1.2 Consider the di®erential equation
y2
dy
= 2
dt
y +1
(8)
which has y = 0 as its only equilibrium point.
1. Why does Theorem 5 not apply to this di®erential equation?
2. Construct the phase line for the di®erential equation (8) and use it to
determine whether y = 0 is a sink, a source, or a node.
3. Find the general solution of the di®erential equation (8) analytically.
Use this general solution to verify your result from part 2 (above).
5
2
Structural Stability and Bifurcation
In order to introduce the concepts of structural stability and bifurcation, we
¯rst illustrate these ideas using the di®erential equation
dy
= ky
dt
(9)
as an example. Actually, it is not right to say that (9) is \a" di®erential
equation. Use of the de¯nite article \a" gives the misleading impression that
(9) describes a single di®erential equation. However, the constant k that
appears on the right hand side of (9) is a parameter. Although k is assumed to
be a constant, di®erent choices of k will give us di®erent di®erential equations.
For example if we set k = ¡4, then we get the di®erential equation
dy
= ¡4y
dt
and if we set k = 3:25, then we get the di®erential equation
dy
= 3:25y.
dt
Thus, (9) is more correctly referred to as a parameterized family of di®erential equations (also simply called a family of di®erential equations) with
parameter k.
Let us now examine how the qualitative behavior of solutions of (9)
changes as we change the value of the parameter k. To begin, suppose that
k = ¡4. In this case, the di®erential equation (9) is
dy
= ¡4y
dt
and the phase line for this di®erential equation is as pictured in Figure 1.a.
If we let k = ¡4:2 then di®erential equation (9) is
dy
= ¡4:2y
dt
and the phase line for this di®erential equation is also as pictured in Figure
1.a.
6
Hence, varying the value of k from ¡4 to ¡4:2 causes no change in
the phase line of (9) and hence no change in the qualitative nature of the
families of solutions. In fact, we know from our past work that the phase
line of (9) will be the one shown in Figure 1.a. for any negative value of k.
On the other hand, if we use any positive value of k, then the phase line
for (9) will be as shown in Figure 1.c. These observations mean that the
family of di®erential equations (9) is structurally stable at any positive or
negative value of the parameter k. However, the parameter value k = 0 is
a bifurcation value for this family because there is a drastic change in the
qualitative nature of solutions of the family (9) as we vary the parameter k
through the value k = 0. In particular, if k is slightly less than 0, then the
equilibrium point y = 0 is a sink, but if k is slightly greater than 0, then the
equilibrium point y = 0 is a source.
Guided by the above example, we now de¯ne the concepts of structural
stability and bifurcation. In the de¯nitions that follow, we assume that we are
working with a parameterized family of autonomous di®erential equations,
dy
= f (y; k)
dt
(10)
with parameter k.
De¯nition 8 The parameterized family of di®erential equations (10) is said
to be structurally stable at the parameter value k0 if for any choice of
parameter value k ¼ k0, the phase line of the di®erential equation
dy
= f (y; k)
dt
is \qualitatively the same" as the phase line of the di®erential equation
dy
= f (y; k0 ) .
dt
Remark 1 In the above de¯nition, when we way that two phase lines are
\qualitatively the same", we mean that the two phase lines have the same
number of sinks, the same number of sources, and the same number of nodes,
and that these equilibria are arranged along the phase lines in the same order.
However, the actual values of the equilibria may be di®erent. The example
7
that follows should help in clarifying this point. Also, we admit that the
meaning of \if k ¼ k0 " in De¯nition 8 is not very mathematically precise.
We could be more precise by postulating the existence of an open interval, N,
containing k0 and say \if k 2 N" rather than \if k ¼ k0 ".
Example 9 Consider the parameterized family of di®erential equations
dy
= y2 ¡ k
dt
(11)
with parameter k. Let us show that this family is structurally stable at the
parameter value k0 = 4. In order to do this, we must show that if k ¼ 4 then
the phase line of the di®erential equation
dy
= y2 ¡ k
dt
is qualitatively the same as the phase line of the di®erential equation
dy
= y2 ¡ 4.
dt
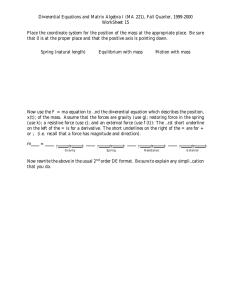
First, let us look at the phase line of dy=dt = y2 ¡4. This di®erential equation
has two equilibrium points, y 1 = ¡2 and y2 = 2. By looking at the graph of
f (y; 4) = y 2 ¡ 4 (shown in Figure 4), we observe that y1 = ¡2 is a sink and
that y2 = 2 is a source.
20
15
10
5
-4
-2
0
2 y
4
Figure 4: Graph of f (y; 4) = y 2 ¡ 4
8
The phase line of dy=dt = y 2 ¡ 4 is shown in Figure 5.b.
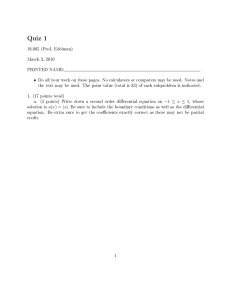
Now, let us suppose that k 6= 4 but that
p k ¼ 4. In this
p case, the equilibrium
2
points
p of dy=dt = y ¡ k pare y 1 = ¡ k and y2 = k. Furthermore, y 1 =
¡ k is a sink and y2 = k is a source. This can be seen by looking at the
graphs of f (y; k) = y 2 ¡ k (for k = 4 and k ¼ 4) shown below.
20
15
10
5
-4
-2
0
2 y
4
-5
Graphs of f (y; k) for k = 4 and k ¼ 4
If k is slightly greater than 4, then the phase line of dy=dt = y2 ¡k appears
as in Figure 5.a; whereas, if k is slightly less than 4, then the phase line of
9
dy=dt = y 2 ¡ k appears as in Figure 5.c. All of the phase lines (in Figures
5.a, b, and c) are qualitatively the same. Each has one sink and one source
and these are arranged in the same order. In summary, we see that if k ¼ 4,
then the phase line of dy=dt = y 2 ¡ k is qualitatively the same as the phase
line of dy=dt = y 2 ¡ 4. This shows that the family of di®erential equations
(11) is structurally stable at the parameter value k = 4.
Exercise 2.1 Explain (perhaps with the help of drawing some appropriate
pictures) why the family of di®erential equations (11) is structurally stable
at any positive value of the parameter k. Also, explain why this family is
structurally stable at any negative value of the parameter k.
Finally, we arrive at the de¯nition of the term \bifurcation".
De¯nition 10 The parameter value k0 is said to be a bifurcation value
for the parameterized family of di®erential equations (10) if the family (10)
is not structurally stable at k0 .
Example 11 The parameter value k0 = 0 is a bifurcation value for the family of di®erential equations (11) of Example 9. This is because if k > 0,
then the family (11) has two equilibria (one of which is a sink and the other
a source); whereas, if k < 0, then the family (11) has no equilibria at all.
Figure 6.a. shows the phase line of (11) for k < 0 and Figure 6.b. shows the
phase line of (11) for k > 0.
10
Example 12 The family of di®erential equations
dy
= ky
dt
is structurally stable at any positive or negative value of the parameter k.
However, k0 = 0 is a bifurcation value for this family. This can be seen by
looking at the phase portraits in Figures 1.a., 1.b., and 1.c. When k < 0, the
equilibrium point at y = 0 is a sink, but when k > 0, the equilibrium point at
y = 0 is a source.
Remark 2 Examples 11 and 12 both show examples of families in which
bifurcations occur at the parameter value k0 = 0. However, the \types" of
bifurcations that occur in these two examples are di®erent. The bifurcation
that is demonstrated in Example 11 involves the \birth" of a pair of equilibrium points (which, after born, begin to spread farther apart from each
other) as the parameter k is increased through the value k = 0; whereas,
the bifurcation that occurs in Example 12 involves a single equilibrium point
that changes from being a sink to being a source as the parameter value k is
increased through the value k = 0.
3
Bifurcation Diagrams
A bifurcation diagram for a parameterized family of di®erential equations,
dy=dt = f (y; k) is a diagram that summarizes the change in qualitative behavior of the equation as the parameter k is varied. The bifurcation diagram
is constructed by plotting the parameter value k against all corresponding
equilibrium values y. Typically, k is plotted on the horizontal axis and y on
the vertical axis. A \curve" of sinks is indicated by a solid line and a curve of
sources is indicated by a dashed line. Our method of constructing bifurcation
diagrams should become evident as we study the following examples.
Example 13 Consider the parameterized family
dy
= y 2 ¡ k:
(12)
dt
To ¯nd the equilibria of this family (as a function of the parameter k), we
must solve the equation
y 2 ¡ k = 0.
11
If k < 0, then the above equation has no
if k > 0, the
p solutions; whereas,
p
above equation has two solutions y1 = ¡ k andpy2 = k. Furthermore,
p we
have determined that in the latter case, y1 = ¡ k is a sink and y2 = k is
a source. The bifurcation diagram for the family (12) is shown in Figure 7.
k
Figure 7 : Bifur. diagram for dy=dt = y 2 ¡ k
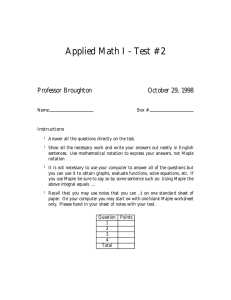
Example 14 In this example, we construct the bifurcation diagram for the
family of di®erential equations
dy
= y 2 ¡ k2:
dt
(13)
The equilibria for (13) are y 1 = ¡ jkj and y 2 = jkj. For any k 6= 0 we have
f 0 (y1 ) = 2y1 = 2 (¡ jkj) < 0
and
f 0 (y 2 ) = 2y2 = 2 jkj > 0:
Hence y 1 is a sink and y2 is a source for any k 6= 0. The bifurcation diagram
for this di®erential equation is shown in Figure 8. Note that k = 0 is a
bifurcation value.
12
k
Figure 8: Bifur. diagram for dy=dt = y 2 ¡ k 2
In all of the examples we have seen so far, there has been only one bifurcation value (and it has always been at k0 = 0, coincidentally). We now
give an example of a family of di®erential equations that has two bifurcation
values.
Example 15 Consider the family of di®erential equations
dy
= y2 + ky + 1:
dt
(14)
Setting
y 2 + ky + 1 = 0
and solving for y (using the quadratic formula) we obtain
p
¡k ¡ k 2 ¡ 4
y1 =
2
and
p
k2 ¡ 4
y2 =
.
2
This shows that the family (14) has no equilibrium points if jkj < 2 and has
two distinct equilibrium points if jkj > 2. Applying Theorem 5, we obtain the
bifurcation diagram shown in Figure 9. Note that the family (14) has two
bifurcation values: k = 2 and k = ¡2.
¡k +
13
k
Figure 9: Bifur. di. for dy=dt = y2 + ky + 1
Exercises: Draw the bifurcation diagrams for the following di®erential
equations:
1)
dy
= ¡ky.
dt
2)
dy
= ky 2 + y + 1.
dt
3)
dy
=y 2 + y + k.
dt
4)
dy
= y(y ¡ 4)(y ¡ k)
dt
5)
dy
= ky ¡ y3
dt
14