TECHNICAL REFERENCE
TR-TSY-000752
ISSUE 1, OCTOBER 1989
Microwave Digital Radio
Systems Criteria
A Module of TSGR, TR-TSY-000440
TECHNICAL REFERENCE
TR-TSY-000752
ISSUE 1, OCTOBER 1989
Microwave Digital Radio
Systems Criteria
A Module of TSGR, TR-TSY-000440
Microwave Digital Radio Systems Criteria
Copyright Page
This document replaces:
Microwave Digital Radio Systems Criteria,
TA-TSY-000752, Issue 1, December 1988.
This document cannot be reproduced without
the express written permission of Bellcore, and
any reproduction, without written authorization,
is an infringement of Bellcore’s copyright.
Copyright 1989
Bellcore
All rights reserved.
ii
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
Notice of Disclaimer
TECHNICAL REFERENCE NOTICE OF DISCLAIMER
This Technical Reference is published by Bell Communications Research, Inc. (Bellcore) to inform
the industry of Bellcore’s view of the proposed generic requirements for Microwave Digital Radio
Systems Criteria.
Bellcore reserves the right to revise this document for any reason, including but not limited to,
conformity with standards promulgated by various agencies, utilization of advances in the state of
the technical arts, or the reflection of changes in the design of any equipment, techniques, or
procedures described or referred to herein.
BELLCORE MAKES NO REPRESENTATION OR WARRANTY, EXPRESS OR IMPLIED,
WITH RESPECT TO THE SUFFICIENCY, ACCURACY, OR UTILITY OF ANY
INFORMATION OR OPINION CONTAINED HEREIN. BELLCORE EXPRESSLY ADVISES
THAT ANY USE OF OR RELIANCE UPON SAID INFORMATION OR OPINION IS AT THE
RISK OF THE USER AND THAT BELLCORE SHALL NOT BE LIABLE FOR ANY DAMAGE
OR INJURY INCURRED BY ANY PERSON ARISING OUT OF THE SUFFICIENCY,
ACCURACY, OR UTILITY OF ANY INFORMATION OR OPINION CONTAINED HEREIN.
This document is not to be construed as a suggestion to any manufacturer to modify or change any
of its products, nor does this document represent any commitment by Bellcore or any Bellcore Client
Company (BCC)1 to purchase any product whether or not it provides the described characteristics.
Readers are specifically advised that each BCC may have requirements or specifications different
from the generic descriptions herein. Therefore, any vendors or manufacturers of products should
communicate directly with a BCC to ascertain that company’s needs, specifications, and actual
requirements.
Nothing contained herein shall be construed as conferring by implication, estoppel or otherwise, any
license or right under any patent, whether or not the use of any information herein necessarily
employs an invention of any existing or later issued patent.
Bellcore does not recommend products, and nothing contained herein is intended as a
recommendation of any product to anyone.
If further information regarding technical content is required, please contact:
District Manager, Digital Radio
Bellcore
331 Newman Springs Road, Room 2Z-287
Red Bank, NJ 07701-7020
For general information, please contact:
District Manager
Information Exchange Management
Bellcore
P.O. Box 1910
445 South Street, Room 2K-122
Morristown, NJ 07960-1910
1. Bellcore Client Company (BCC), as used in this document, means any divested Bell Operating
Company, or its successor, or any regional affiliate thereof.
iii
Microwave Digital Radio Systems Criteria
Notice of Disclaimer
TR-TSY-000752
Issue 1, October 1989
TSGR Contents
Set
Volume
1
2
TR-TSY-000440
Transport
Systems
Generic
Requirements
(TSGR)
3
4
5
Section
Common Requirements
And
Digital Loop Carrier Systems
Integrated Digital Loop Carrier
System
ISDN Transport, Interface and
Related Requirements
TR-TSY-000925
Digital Fiber Optic Systems
And
Digital Radio Systems
SONET Transport Criteria
TR-TSY-000919
Tab
Module
1
Common Requirements
TR-TSY-000499
2
Digital Loop Carrier Systems
TR-TSY-000057
3
Digital Loop Carrier Systems
TA-TSY-000057
4
Integrated Digital Loop Carrier System
TR-TSY-000303
5
Integrated Digital Loop Carrier System
TA-TSY-000303 (Feature Set B)
6
Integrated Digital Loop Carrier System
TA-TSY-000303 (Feature Set C)
7
ISDN Basic Access Digital Subscriber Lines
TR-TSY-000393
8
ISDN Basic Access Transport System
TR-TSY-000397
9
Universal Digital Channel (UDC)
TA-TSY-000398
10
ISDN Primary Rate Access Transport System
TA-TSY-000754
11
Digital Fiber Optic Systems
TA-TSY-000038
12
Microwave Digital Radio Systems
TR-TSY-000752
13
SONET Transport Systems: Common Criteria
TR-TSY-000253
14
SONET Add-Drop Multiplex Equipment
TR-TSY-000496
15
Wideband and Broadband Digital Cross-Connect
TR-TSY-000233
16
SONET Digital Switch Trunk Interface
TR-TSY-000782
17
SONET Regenerator Generic Criteria
TA-TSY-000917
Note:
This document is a module of Transport Systems Generic Requirements (TSGR), TR-TSY-000440.
iv
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
Notice of Disclaimer
To order modules, sections, or the entire TSGR:
• Public should contact:
Bellcore
Customer Service
60 New England Avenue, DSC 1B-252
Piscataway, New Jersey 08854-4196
1 (800) 521-CORE
(201) 699-5800 (for foreign calls)
• BCC personnel should contact their company document coordinator.
• Bellcore employees should call the Bellcore Document Hotline: (201) 699-5802.
v
Microwave Digital Radio Systems Criteria
Notice of Disclaimer
vi
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
Contents
Microwave Digital Radio Systems Criteria
Contents
Contents
1. INTRODUCTION .................................................................................................... 1–1
1.1 Purpose ............................................................................................................ 1–1
1.2 Criteria............................................................................................................. 1–1
1.3 Updating .......................................................................................................... 1–2
1.4 Change History................................................................................................ 1–2
1.5 General System Description............................................................................ 1–3
2. SPECTRUM CONSIDERATIONS.......................................................................... 2–1
2.1 General Requirements ..................................................................................... 2–1
3. SYSTEM PERFORMANCE UNDER NORMAL OPERATING CONDITIONS .. 3–1
3.1 Baseband Interface .......................................................................................... 3–1
3.2 Error Criteria During Normal Operation......................................................... 3–2
3.3 Equipment Caused Burst of Errors ................................................................. 3–3
3.4 Miscellaneous Requirements .......................................................................... 3–3
4. SENSITIVITY TO MULTIPATH DISPERSIVE FADING .................................... 4–1
4.1 Historical Concept of Fade Margin................................................................. 4–1
4.2 Concept of Dispersive Fade Margin for Digital Radio ................................... 4–2
4.3 Dispersive Multipath Fading Model and Fading Signature ............................ 4–3
4.4 Formula for Calculating Dispersive Fade Margin .......................................... 4–7
4.5 Dispersive Fade Margin with Optional Adaptive Equalizers ......................... 4–8
4.6 Qualifications to Calculated Dispersive Fade Margin .................................... 4–8
4.7 Hysteresis in Resynchronization and Reframe ............................................... 4–9
4.8 Hysteresis In an Adaptive Equalizer ............................................................... 4–9
4.9 Other Diversity Protection ............................................................................ 4–10
4.10 Test Jacks of Propagation Conditions ........................................................... 4–12
5. DIGITAL STREAM TIMING AND JITTER .......................................................... 5–1
5.1 Jitter Accommodation ..................................................................................... 5–1
5.2 Jitter Generation .............................................................................................. 5–1
5.3 Jitter Transfer Functions ................................................................................. 5–2
5.4 Jitter Enhancement .......................................................................................... 5–3
6. OUTAGE CONSIDERATIONS............................................................................... 6–1
6.1 General ............................................................................................................ 6–1
6.2 Channel Outage ............................................................................................... 6–1
6.3 System Gain .................................................................................................... 6–1
6.4 Interference ..................................................................................................... 6–2
6.4.1 Co-Channel Interference Sensitivity .................................................. 6–2
6.4.1.1 Theoretical SNR Versus BER ........................................... 6–2
vii
Microwave Digital Radio Systems Criteria
Contents
TR-TSY-000752
Issue 1, October 1989
6.4.1.2
6.5
6.6
Co-Channel Carrier-To-Interference Ratio (CIR) Versus
BER.................................................................................... 6–2
6.4.2 RF Filter and Radar Interference ....................................................... 6–3
6.4.2.1 Receiving Filter to Allow Co-Polar Adjacent Channel
Operations.......................................................................... 6–4
6.4.3 Adjacent Channel Interference Sensitivity ........................................ 6–4
Equipment Reliability ..................................................................................... 6–4
System Reliability Generic Requirements ...................................................... 6–5
7. SYSTEM GAIN AND RADIO RECEIVER DYNAMIC RANGE ......................... 7–1
8. PROTECTION SWITCHING .................................................................................. 8–1
8.1 Introduction ..................................................................................................... 8–1
8.2 Protection Switching Threshold ...................................................................... 8–2
8.2.1 Protection ........................................................................................... 8–2
8.2.2 Restoration ......................................................................................... 8–2
8.3 Detection Time................................................................................................ 8–2
8.4 Hitless Frequency Diversity Switch................................................................ 8–2
8.5 Other Hitless Switches .................................................................................... 8–3
8.6 Switching Times.............................................................................................. 8–4
8.7 Error Performance During Switching ............................................................. 8–4
8.8 Protection Switch Availability and Reliability ............................................... 8–4
8.8.1 Silent Failures .................................................................................... 8–4
8.8.2 Protection Switch Exercising 1XN) ................................................... 8–4
8.9 Switch Initiation .............................................................................................. 8–5
8.10 Supplier-Provided Information ....................................................................... 8–5
9. MONITORING, ALARM, AND CONTROL.......................................................... 9–1
9.1 General ............................................................................................................ 9–1
9.2 Local Monitoring ............................................................................................ 9–2
9.3 Remote Monitoring, Alarm, and Control ........................................................ 9–3
9.3.1 Remote Monitored Information ......................................................... 9–3
9.3.2 Remote Alarm and Control Indications ............................................. 9–3
9.3.3 Telemetry Memory or Stretching....................................................... 9–3
9.3.4 Alarm Interface Aspects..................................................................... 9–4
9.3.5 Fail-Safe Alarm and Control System ................................................. 9–4
9.3.6 Alarm System Capability ................................................................... 9–4
9.4 Operations and Maintenance........................................................................... 9–4
9.4.1 Remotable Fault Locating .................................................................. 9–4
9.4.2 Performance Monitoring .................................................................... 9–5
9.4.2.1 DS3 Performance Impairment Events ............................... 9–5
9.4.2.2 Performance Monitoring Parameters................................. 9–6
9.4.3 Electrical, Technical, and Applications Interfaces............................. 9–7
10. TROUBLE SECTIONALIZATION....................................................................... 10–1
10.1 Downstream Alarm Prevention..................................................................... 10–1
viii
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
Contents
10.2 Switching Section.......................................................................................... 10–1
10.3 Parity Restoration.......................................................................................... 10–1
11. ORDERWIRE......................................................................................................... 11–1
12. SERVICE CHANNEL............................................................................................ 12–1
12.1 Background ................................................................................................... 12–1
12.2 Service Channel Interface and Requirements ............................................... 12–1
12.2.1 Service Channel Remoting............................................................... 12–1
12.2.2 Service Channel Provision ............................................................... 12–1
12.3 Service Channel Protection ........................................................................... 12–2
13. SAFETY CONSIDERATIONS.............................................................................. 13–1
13.1 High Voltage ................................................................................................. 13–1
13.2 High Temperature ......................................................................................... 13–1
13.3 Radiation Hazards ......................................................................................... 13–1
14. POWER SUPPLY INTERFACES AND REQUIREMENTS ................................ 14–1
14.1 Introduction ................................................................................................... 14–1
14.2 Bus Voltages ................................................................................................. 14–1
14.3 Bus Noise ...................................................................................................... 14–2
14.4 Noise Allocation............................................................................................ 14–3
14.5 Radio Frequency Interference ....................................................................... 14–5
14.5.1 Emitted Radiation Requirements ..................................................... 14–5
14.5.2 Conducted Noise Currents ............................................................... 14–6
14.5.3 Field Intensity .................................................................................. 14–7
14.6 Electrolytic Capacitors (All Units)................................................................ 14–8
14.7 Circuit Breakers ............................................................................................ 14–8
15. PHYSICAL DESIGN AND HUMAN FACTORS GENERIC REQUIREMENTS
................................................................................................................................. 15–1
15.1 Introduction ................................................................................................... 15–1
15.2 General Equipment Requirements ................................................................ 15–1
15.3 Additional Environment Factors ................................................................... 15–1
15.3.1 Altitude............................................................................................. 15–1
15.3.2 Acoustical Noise .............................................................................. 15–1
15.3.3 Thermal Shock ................................................................................. 15–2
15.4 Human Factors .............................................................................................. 15–2
15.5 Physical Design ............................................................................................. 15–2
16. DOCUMENTATION.............................................................................................. 16–1
16.1 Required Documentation .............................................................................. 16–1
16.2 Standards ....................................................................................................... 16–1
17. THERMAL SHOCK TEST METHODS................................................................ 17–1
17.1 General .......................................................................................................... 17–1
17.2 Tests .............................................................................................................. 17–2
ix
Microwave Digital Radio Systems Criteria
Contents
17.2.1
17.2.2
17.2.3
17.2.4
TR-TSY-000752
Issue 1, October 1989
Test 12A: High-Temperature Thermal Shock ................................. 17–2
Test 12B: Low-Temperature Thermal Shock .................................. 17–3
Test 12C: Cyclic Temperature, High Relative Humidity ................ 17–4
Test 12D: Cyclic Temperature, Low Relative Humidity ................. 17–5
18. 4-GHz DIGITAL RADIO REQUIREMENTS ....................................................... 18–1
18.1 Spectrum Considerations .............................................................................. 18–1
18.1.1 Adjacent Channel Generic Requirements ........................................ 18–1
18.1.2 Frequency Plans ............................................................................... 18–1
18.2 RF Interface................................................................................................... 18–1
18.3 Outage Considerations .................................................................................. 18–2
19. 6-GHz DIGITAL RADIO REQUIREMENTS ....................................................... 19–1
19.1 Spectrum Considerations .............................................................................. 19–1
19.1.1 Adjacent Channel Generic Requirements ........................................ 19–1
19.1.2 Frequency Plans ............................................................................... 19–1
19.2 RF Interface................................................................................................... 19–2
19.3 Outage Considerations .................................................................................. 19–2
20. 11-GHz DIGITAL RADIO GENERIC REQUIREMENTS................................... 20–1
20.1 Spectrum Considerations .............................................................................. 20–1
20.1.1 Adjacent Channel Generic Requirements ........................................ 20–1
20.1.2 Frequency Plans ............................................................................... 20–1
20.2 RF Interface................................................................................................... 20–2
20.3 Outage Considerations .................................................................................. 20–2
21. ACRONYMS .......................................................................................................... 21–1
22. REFERENCES........................................................................................................ 22–1
Appendix A: SUMMARY OF REQUIREMENTS AND OBJECTIVES...................... A–1
x
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
List of Figures
List of Figures
Figures
Figure 1.
General Model of a Digital Radio System ............................................... 1–4
Figure 2.
The W-Curves in B-fo Space of a 6-GHz 90-Mb/s 16-QAM System With
Adaptive Amplitude Equalizer ................................................................. 4–6
Figure 3.
Regenerator Jitter Transfer Function........................................................ 5–3
Figure 4.
Digital Radio Switching Section and Interfaces With Service Channel, Order
Wire, Monitors, and Alarm and Control Equipment. ............................... 8–1
Figure 5.
Block Diagram on Maintenance System .................................................. 9–1
Figure 6.
Battery Noise Test Setup........................................................................ 14–4
Figure 7.
Radiated Emission Requirements........................................................... 14–5
Figure 8.
Conducted Emission Requirements........................................................ 14–6
Figure 9.
Radiated Susceptibility Requirements.................................................... 14–7
Figure 10.
High-Temperature Thermal Shock Tests ............................................... 17–2
Figure 11.
Low-Temperature Thermal Shock Tests ................................................ 17–3
Figure 12.
High Humidity - Cyclic Temperature Test (Perform Three Cycles)...... 17–4
Figure 13.
Low Humidity - Cyclic Temperature Test (Perform Three Cycles) ...... 17–5
Figure 14.
4-GHz Frequency Plan ........................................................................... 18–3
Figure 15.
6-GHz Frequency Plan ........................................................................... 19–3
Figure 16.
11-GHz Frequency Plan ......................................................................... 20–3
xi
Microwave Digital Radio Systems Criteria
List of Figures
xii
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
List of Tables
List of Tables
Tables
Table 1.Voltage Requirements for -48V Distribution Subsystems ..............................14–1
Table 2.Voltage Requirements for -24V Distribution Subsystems .............................. 14–2
Table 3.Electrical Noisea .............................................................................................. 14–2
Table 4.Noise Allocation Among Converters .............................................................. 14–3
xiii
Microwave Digital Radio Systems Criteria
List of Tables
xiv
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
1.
1.1
Microwave Digital Radio Systems Criteria
INTRODUCTION
INTRODUCTION
Purpose
This Technical Reference (TR) contains Bellcore’s view of the proposed generic
requirements and objectives for digital microwave radio systems with DS3 interfaces
intended for use by Bellcore Client Companies (BCCs). The particular electrical and
physical requirements and objectives cited in this TR are based on Bellcore’s view of BCC
maintenance and operating requirements, transmission objectives, equipment and design
standards, and realizable performance to meet typical BCC needs. These generic
requirements, objectives, and other preferred characteristics form a base of definitive
criteria for the purpose of permitting analysis to determine if particular microwave digital
radio systems meet the needs of a typical BCC. Section 22 lists the documents referenced
in this publication. Appendix A contains a synopsis of proposed transmission performance
generic requirements.
The general requirements for transport systems are given in TR-TSY-000499, Transport
Systems Generic Requirements (TSGR): Common Requirements, Issue 2, December
1988,[l] a module of TSGR, TR-TSY-000440.
The function of the microwave digital radio systems in the 4-GHz, 6-GHz, and 11-GHz
common carrier bands considered in this TR is to reliably relay two or more DS3 signals
(44.736 Mb/s) between DS3 cross-connects.
Although most of the generic requirements in this TR can be met easily by the current
generation of digital radio systems (e.g., 64-Quadrature Amplitude Modulation [QAM]
systems), it is hoped that the future higher capacity systems, such as 256-QAM, can also
meet these generic requirements and objectives.
1.2
Criteria
This TR identifies those administrative, engineering, maintenance, and technical generic
requirements and objectives that, in Bellcore’s view, meet the needs of a typical BCC if
used for voice grade telephone and data services.
The following terminology is used in this TR.
• Criteria - Standards that may be used by Bellcore or a BCC to determine product
compliance. Criteria include requirements, objectives, and options.
• Requirements - Features or functions that are mandatory, in Bellcore’s view, for a
BCC to realize the required operational compatibility or service consistency in the use
of the product. Failure to meet requirements may cause application restrictions, result
in improper functioning of the product, or hinder operations. Requirements contain the
words shall or must.
1–1
Microwave Digital Radio Systems Criteria
INTRODUCTION
TR-TSY-000752
Issue 1, October 1989
• Objectives - Features or functions that are desirable for a BCC’s use and may be
required by’ some BCCs. Objectives represent goals to be achieved in the telephone
plant, or criteria intended to enhance a product’s use, performance, or scope of
application or operations. Objectives, any of which may be reclassified as requirements
in the future, contain the words should or desirable.
• Options - Features or functions that, in Bellcore’s view, may be useful in specific BCC
applications. These features or functions may be classified as requirements or
objectives by a BCC, depending on the application environment in which the system is
deployed. Options are typically designated by the phrases as an option or an optional
feature.
To meet overall network performance criteria using digital facilities, impairments have
been allocated to the radio line. This has been done considering the range of system
applications (see Section 1.5) and the objectives, allocations, and specifications in effect
before the advent of digital radio. The criteria are subject to change.
1.3
Updating
Vertical bars in the right margin indicate information that has changed from TA-TSY000752. They are not used to indicate minor or editorial changes. Asterisks in the right
margin indicate areas where text has been deleted.
1.4
Change History
The major changes from Issue 1 of TA-TSY-000752 include:
• Section 3.2 - Error criteria revised
• Section 3.3 - Definition corrected for burst errored second
• Section 4.2 - Channel outage requirement added
• Section 7 - Dynamic range for 11-GHz system revised
• Section 9.4.2 - New text on performance monitoring
• Section 13.2 - Ambient temperature provided for associated safety requirement
• Section 14.2 - Table 1revised and Table 2 added to update bus voltage requirements
• Section 14.3 - Table 3 corrected and updated
• Section 14.4 - Table 4 corrected
• Section 15.4 - New section on human factors provided
• Section 15.5 - New section on physical design provided
1–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
INTRODUCTION
• Figure 6 - Correct values of RL provided
• Figures 8 and 9 - Revised captions
• Appendix A - Test conditions for Section 3.2 provided; test associated with Section
14.2 updated.
1.5
General System Description
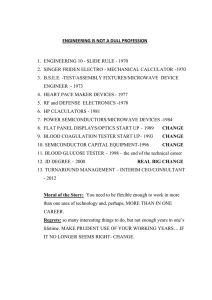
Figure 1 is a general block diagram of a digital radio system switch section. The system
shall incorporate per-section and/or per-hop diversity subsystems to protect the digital
stream. Figure 1shows 1×N protection switching on a two-hop system. The actual number
of hops in a switch section is expected to vary between one and five. Systems, where N (the
number of working channels) is less than three, often use hot standby equipment protection,
which would slightly modify the figure.
The typical range of applications for digital radio systems varies from a one-channel, onehop system up to a multihop system (between drop and add locations), which may grow to
full-size systems (using all the available Radio Frequency [RF] channels). Thus, the criteria
and requirements in this document cover both high-density and low-density systems.
1–3
PROT
SW
DSX3
DSX3
PROT
SW
DIGITAL
TERM.
AND
SIGNAL
PROCESSOR
RADIO
TRMTR
RADIO
RCVR
THROUGH
CONNECTION
OR DIGITAL
REGENERATOR
RADIO
TRMTR
RADIO
RCVR
DIGITAL
TERM.
AND
SIGNAL
PROCESSOR
PROT
SW
DSX3
PROT
SW
DSX3
Microwave Digital Radio Systems Criteria
INTRODUCTION
General System Description
1–4
DS3
DS3
DIGITAL TERMINALS:
GENERATE MULTISTATE MODULATION OF OUTPUT CARRIER: PSK, QAM, FM, ETC.
MAY DIRECTLY MODULATE EITHER 1F OR RF CARRIER.
SIGNAL PROCESSOR INCLUDES: SCRAMBLING DIFFERENTIAL CODING, PARITY BIT INSERTION, VIOLATION
MONITORING REMOVING (VMR), AIS SIGNAL GENERATION, PROVISION FOR
IN-SERVICE OR OUT- OF-SERVICE MONITORING IN REPEATER STATIONS
ADDITIONAL MULTIPLEXING OF:
TWO OR MORE DS3 STREAMS
STUFFING BITS, FRAMING BITS.
SERVICE CHANNEL BITS (UNLESS ANALOG FM IS USED)
MAY INCLUDE DIRERSITY COMBINING AND/OR ADAPTIVE EQUALIZATION.
DSX3
DS3 CROSS-CONNECT CIRCUIT
BASEBAND-TO-BASEBAND TYPE (DS3 TO DS3), 1XN OR HOT STANDBY.
Figure 1. General Model of a Digital Radio System
TR-TSY-000752
Issue 1, October 1989
RADIO RECEIVER:
PROTECTION SWITCHING:
TR-TSY-000752
Issue 1, October 1989
2.
2.1
Microwave Digital Radio Systems Criteria
SPECTRUM CONSIDERATIONS
SPECTRUM CONSIDERATIONS
General Requirements
1. Federal Communications Commission (FCC) Requirements
The system must comply with FCC Rules and Regulations, and its transmitter must be
type approved (Rules, Part 21).
2. Other Requirements
The system shall be capable of being certified for its receiver (Rules, Part 15), although
this is not an FCC requirement for type approval. The system shall also be capable of
meeting the requirements for any nontransmitter or nonreceiver elements that generate
radio, frequency energy (Rules, Part 15.7). Compliance with these sections minimizes
possible interference with other radio services or telephone equipment.
2–1
Microwave Digital Radio Systems Criteria
SPECTRUM CONSIDERATIONS
2–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
3.
Microwave Digital Radio Systems Criteria
SYSTEM PERFORMANCE UNDER NORMAL OPERATING CONDITIONS
SYSTEM PERFORMANCE UNDER NORMAL
OPERATING CONDITIONS
This section includes the requirements for operation during periods when radio propagation
and all equipment conditions are normal. Sections 14 and 15 define normal equipment
operating conditions. Operation during other than normal conditions is covered in other
sections.
The digital radio system shall normally appear transparent to valid signals appearing at its
DS3 interfaces reproducing the input signals, and shall preserve information, format, and
DS3 stream identification. Under abnormal conditions (defined in Sections 14 and 15),
certain deviations from this behavior are permissible. However, a given radio system shall
always be capable of transmitting a digital stream offered by another such system, when
those systems are operating within their specification limits.
3.1
Baseband Interface
To allow for modular system growth, the digital signals at various bit rates shall have
certain common characteristics to permit interconnection among a variety of transmission
facilities and multiplexers. The digital radio systems considered here interface at the DS3
level through DSX-3 cross-connect equipment. Internal interfaces within the radio system
(e.g., at intermediate repeater points) are not considered in this document. External
interfaces include
• Connections to multiplex terminals — DS3 to lower or higher rates
• Connections between DS3 rate facilities of different types
• Connections between 1xN protection systems on the same route.
This document assumes that all external connections are made via a DSX-3 interface,
which is a firm requirement on radio equipment suitable for general use. If any option is
made available that provides for external connections without interconnecting at a DSX-3,
then the intent and spirit of the DSX-3 interconnection specifications in the following
paragraph should still be met.
Digital radio systems shall adhere to the signal format and requirements at the DSX-3
interconnection point to facilitate the smooth growth of the digital network. The DSX-3
interconnection specifications are:
1. The radio system shall interface at the DS3 rate (44.736 Mb/s) and DS3 format, as
specified in TR-TSY-000499.[1]
2. Parity Correction
• In the past, parity correction has usually been accomplished within a switch
section. For such a case, the following requirement applies.
3–1
Microwave Digital Radio Systems Criteria
SYSTEM PERFORMANCE UNDER NORMAL OPERATING CONDITIONS
TR-TSY-000752
Issue 1, October 1989
The DS3 signal, applied to the cross-connect, shall have parity bits that are in
agreement with the information bits in the signal. This requirement for correct
parity at the DSX-3 cross-connect applies in the presence, as well as in the absence,
of errors. Therefore, a violation monitor and removal function shall be provided
(see TR-TSY-000191).[2]
• Such usage is gradually diminishing with the advent of new systems that have their
own line error checking scheme. In the future, DS3 parity violation should be
treated primarily as a path parameter but with an option to treat it as a line
parameter when required.
3.2
Error Criteria During Normal Operation
Digital transmission errors on a properly designed and installed system should occur only
rarely under normal operating conditions. Under circumstances of undisturbed propagation
within normal ranges of such factors as temperature, office battery voltage, and noise, long
error-free periods should be observed with only occasional short bursts of errors.
The normal performance of a radio system can be described as operating with a very low
Bit Error Ratio (BER) averaged over long time intervals. Specifying and measuring very
low BERs, however, is not a satisfactory method of characterizing overall performance
during normal operation. As a result, a requirement is placed on the long-term percentage
of time that a DS3 channel is error-free. Measurements of the percent Error-Free Seconds
(EFSs) are made over periods of five consecutive days for stable statistics. The equipment
requirement for a one-way, one-hop system is 99.96% EFS or better. The corresponding
0.04% Errored Seconds (ESs) are allocated as follows:
Terminals
0.03% (0.015% per end)
(One) Hop
0.01%
Total
0.04%.
This requirement is consistent with the overall DS3 channel requirement of 1.0% ES at 250
miles given in Section 4.3 of TR-TSY-000499.[il Assuming 10 hops in a maximum 250mile system, the 0.04% requirement becomes 0.4%. This is tighter than the 1.0%
requirement, and applies during periods of undisturbed propagation. The remaining 0.6%
is left as margin that could be exceeded occasionally during periods of abnormal
propagation conditions.
The manufacturers of systems with modulation levels higher than 16 (e.g., 64-QAM) are
required to state whether a special arrangement, such as forward error correction coding, is
required to meet this background error criteria.
3–2
TR-TSY-000752
Issue 1, October 1989
3.3
Microwave Digital Radio Systems Criteria
SYSTEM PERFORMANCE UNDER NORMAL OPERATING CONDITIONS
Equipment Caused Burst of Errors
To limit the error bursts caused by digital radio equipment, it is required that a one-way,
one-hop system produce less than two burst ESs in a five consecutive day test period during
normal propagation condition. A burst ES is a 1-second interval containing at least 2800
errored bits, measured at the DS3 levels.
3.4
Miscellaneous Requirements
The following miscellaneous performance requirements shall be met:
1. Restoration of a valid DS3 output code shall take place within 3 ms after removal of a
short transient system disturbance, which interrupts only the radio system framing of
the DS3 signals without loss of the RF signals.
2. Recovery of a multihop (up to seven hops) system from a prolonged (greater than 1
minute) "no RF signal" state shall take place within 5 seconds after a valid signals is
restored.
3. The digital radio system shall have a robust framing algorithm such that when the radio
system recovers from an outage and Out Of Frame (OOF) condition, no misframed
output shall ever occur.
3–3
Microwave Digital Radio Systems Criteria
SYSTEM PERFORMANCE UNDER NORMAL OPERATING CONDITIONS
3–4
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
4.
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
In a dispersive channel, the amplitude and the envelope delay of the channel transfer
function vary with frequency. These frequency variations introduce linear distortion to the
digital pulses and lead to intersymbol interferences for the digital bit stream. Furthermore,
most modern high-capacity digital radio systems use two independent digital modulations
on two orthogonal (i.e., 90o out of phase) carriers of the same frequency to double the
transmission capacity in a given channel. The dispersion in the channel introduces severe
crosstalk between the two digital signals on the two orthogonal carriers, and it degrades the
BER performance.
This section describes a procedure for laboratory characterization of the sensitivity of a
digital radio system to dispersive multipath fading, the requirements on dispersive fade
margin, and counter measures against dispersive fading.
The manufacturers are required to provide the dispersive fade margin and the fading
signatures (defined in Sections 4.2 and 4.3) for their digital radio systems.
The required minimum dispersive fade margin is 35 dB when the digital radio system is
equipped with the best adaptive equalizers that are commercially available to the
customers. The objective on the dispersive fade margin is 45 dB or greater. Increasing the
dispersive fade margin reduces the need for diversity protection on many radio paths and is
very attractive economically. On the other hand, for paths with fewer fading activities, the
user may choose an option of less powerful adaptive equalization (e.g., no transversal
equalizer) with a dispersive fade margin below the 35-dB requirement.
The concept of dispersive fade margin for digital radio evolved from that of the analog
radio fade margin. Section 4.1 provides a brief review of analog radio fade margin.
4.1
Historical Concept of Fade Margin
The performance of an analog FM radio path is strongly controlled by the fade depth at the
carrier frequency. When the fade depth at the carrier frequency exceeds a threshold known
as the "fade margin," the Signal-to-Noise Ratio (SNR) in the channel is no longer
acceptable and a radio outage occurs. The fade margin of an analog FM radio is simply the
system gain minus the section loss and is a physically measurable quantity. A large amount
of multipath fading data has been collected from numerous line-of-sight microwave radio
paths, and a simple model for fade depth distribution has been deduced empirically by
Barnett:[3]
T = rT 0 10
– ( F ⁄ 10 )
(1)
for F ≥ 20 dB, where
F = fade depth in dB
T0 = the time period of fading measurement (e.g., 3 months)
T = the accumulated time that fade depth exceeds F
r = fade occurrence factor, which is a function of radio frequency, path length, climate,
path terrain, and geographic location.
4–1
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
Earlier investigators recognized that Equation (1) is the asymptotic behavior of a Rayleighdistribution for deep fades. The Rayleigh-distributed fading signals were observed on many
over-the-horizon (i.e., troposphere scattering) microwave radio paths where the number of
propagation rays is usually large for a given path. It is well known that the summation of a
large number of randomly varying rays leads to a Rayleigh-distributed fading signal. This
model does not, however, appear to be applicable to most line-of-sight paths where the
number of propagation rays is not large during the multipath fading condition. This paradox
was resolved when Lin[4] developed an analytic basis that substantiated the general
applicability of Equation (1) to line-of-sight paths even when the number of rays is small.
The empirical finding by Barnett, together with the analytic basis developed by Lin, firmly
established Equation (1) for engineering line-of-sight microwave radio paths.
This finding indicates that the entire probability distribution of deep fades (> 20 dB) on a
radio path is uniquely determined by a single parameter: the fade occurrence factor, r. The
equation greatly simplifies the characterization of geographic variation of multipath fading.
Thus, the outage probability of a given analog FM radio path can be calculated easily by
simply substituting the known fade margin of the radio system Ft into Equation (1) for F.
4.2
Concept of Dispersive Fade Margin for Digital Radio
The performance of a digital radio system is controlled not only by the SNR but also by the
amount of dispersion in the channel transfer function. Channel dispersions introduce
crosstalk between the two orthogonal rails and intersymbol interference, which degrades
the BER.
For digital radio systems, a 1-second period during which the BER exceeds 10-3 is a
Severely Errored Second (SES). Any SES is considered to be a second of outage. This
definition of outage differs from that given in Section 2.1 of TR-TSY-000499, [1]) because
microwave radio systems are subject to rapid fading conditions.
• The DS1-to-DS1 channel outage requirement for microwave digital radio systems is no
more than 105 minutes per year (0.02%) for a 250-mile system. This requirement is
prorated by route mileage, and is equivalent to 0.42 minutes per year per mile.
Nominally, 75% of the requirement is allocated to the media, and 25% to failures
caused by hardware.
• The total outage time of a digital radio route is usually dominated by the outages caused
by radio propagation impairments, such as multipath dispersive fading. Under
frequency diversity protection or hot standby protection, the radio route outages
resulting from equipment failures are usually negligible.
• During active multipath fading periods, the average duration of the high BER events of
a digital radio route with diversity protection is usually about 1 to 2 seconds. A large
number (e.g., 60) of such events can occur in a heavy fading evening.
4–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
• The cable outage definition of a high BER minimum duration of 10 seconds is
inappropriate for digital radio because the average duration of high BER events on a
radio route is much shorter than the 10-second threshold in cable outage definition.
These 1 to 2 seconds of high BER events must be controlled through proper radio route
engineering to meet the end-to-end reliability objective.
Severe dispersions often cause outages on digital radio systems. Multipath fading is often
accompanied by severe channel dispersion because of the "destructive interferences"
among the received multiple signals that have different path delays. Digital radio outages
can occur over a wide range of total power fade depths depending on the combination of
the amounts of thermal noise and channel dispersion. Therefore, the historical concept of a
single threshold of fade margin for analog radio is not directly applicable to digital radio.
A rigorous calculation of the outage probability of a digital radio path caused by multipath
dispersion requires a numerical, multidimensional integration of the probability density
function of several randomly varying dispersive channel parameters. Such a process is too
complicated and impractical for day-to-day engineering of digital radio routes. To simplify
the engineering process, it is desirable to have a simple method for calculating the
approximate outage caused by multipath dispersion. For this purpose, the concept of
dispersive fade margin Fd for digital radio is introduced and is defined as
F d = – 10 Log 10 Td / ( rT0 )dB,
(2)
or equivalently
Td = rT 0 10
– ( F d ⁄ 10 )
(3)
where
Td = measured outage time of the digital radio path caused by multipath dispersion only
T0 = the total time period of the multipath fading measurement on the digital radio path
The advantage of this approximation is that the outage time of a digital radio path, caused
by multipath dispersion, can be easily calculated by substituting a given Fd of a digital radio
system into Equation (3).
Unlike analog FM radio, the Fd of a digital radio system is not a directly measurable single
fade depth threshold. Section 4.4 describes a procedure for the laboratory measurement and
calculation of the Fd of a digital radio system.
4.3
Dispersive Multipath Fading Model and Fading Signature
A method of measuring the sensitivity, known as the "equipment signature," of a digital
radio system to multipath dispersive fading has been developed. The method is based on
the dispersive multipath fading model developed by Rummler.[5][6]
4–3
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
Very detailed data of the amplitude dispersion (i.e., spectral shape) of multipath fading on
a 6-GHz channel with a 30-MHz bandwidth were measured and recorded from the 26-mile
Atlanta-to-Palmetto path in Georgia in June and July of 1977. The radio channel was
equipped with a 78-Mb/s 8-Phase-Shift Keying (PSK) digital radio system. The received
signal spectrum was monitored with a set of 24 narrow filters with bandwidth of 0.2 MHz
spaced 1.1 MHz apart across this channel.
Rummler analyzed the 2-month data on amplitude dispersion and demonstrated that the
following pseudo-3-ray model adequately represents about 95% of the measured amplitude
dispersions within the 30-MHz channel bandwidth:
H ( ω ) = a [ 1 – b Exp ± j ( ω – ω 0 ) T ]
(4)
where
a = randomly varying flat fade across the channel
b = amplitude of the second ray normalized to that of the first ray
T = 6.3 ns
ω = 2πf
f = frequency
ω 0 = 2πf 0
0 ≤ b ≤ 1.
The + and - signs in the exponent correspond to nonminimum and minimum phase fades,
respectively. This function represents a pseudo-3-ray model where the first two rays with
very small relative delay produce essentially a depression (i.e., almost flat fade) with
amplitude "a" within the 30-MHz observation window. The third ray, with a fixed delay of
6.3 ns and an amplitude of "b" relative to the resultant of the first two rays produces the
channel dispersion. Parameters "a" and "b" control the depth and the shape of the amplitude
dispersion, respectively. Parameter "f0" determines the frequency of the position of the
minimum (i.e., the notch) of the amplitude dispersion.
Thus, this model has three degrees of freedom: a, b, and f0. By fitting Equation (4) to the
measured spectral shape at an instant in time, one obtains a set of a, b, and fo for that instant.
By repeating such curve fitting to all the measured amplitude dispersion data in June and
July of 1977, Rummuler obtained the joint probability density function of parameters a, b,
and f0.[5] (For other broadband applications such as frequency diversity modeling, Lee and
Lin[7][8] demonstrated that a more general 3-ray model with randomly varying relative
delays is required to model the broadband dispersion over 250 MHz or wider.)
Lundgren and Rummler[6] show that the outage due to only the dispersion depends on the
relationship between the critical notch depth B3 and the notch frequency fo where
A = – 20 Log 10 a
(6)
is the flat fade level in dB in the channel, and
B = – 20 Log 10 ( 1 – b )
is the notch depth in dB with respect to the flat level.
4–4
(7)
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
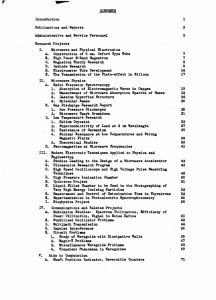
B3 is the critical value of B, for a given notch frequency, f0, to produce 10-3 BER. The locus
of all (B3 , f0 ) pairs for the constant BER (i.e., 10-3) on the B versus f0 space is the fading
signature, or the W-curve, for a digital radio system. Figure 2 shows examples of W-curves
for a 6-GHz, 90-Mb/s system. It is obvious that the shape of these fading signatures
resembles that of the letter W. M. Emshwiller[9]first introduced the concept of equipment
signature to characterize the sensitivity of radio systems to multipath dispersive fading.
A digital radio system can now be characterized by making laboratory measurements where
a fade simulator simulating Equation (4) is inserted between the transmitter and the
receiver, and parameters b and fo are measured to give the constant BER of 10-3. Rummier
describes a fade simulator.[6] In the measurements of W-curves, it is important to set the
radio and the fade simulator parameters to maintain a high SNR (i.e., >50 dB), because the
purpose of W-curves is to characterize the system sensitivity to channel dispersion instead
of thermal noise.
4–5
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
.
BS dB
16
14
12
10
8
-20
0
-10
BER = 10-3
10
20
f0 M H z
MINIMUM PHASE
NON-MINIMUM PHASE
Figure 2. The W-Curves in B-fo Space of a 6-GHz 90-Mb/s 16-QAM System With
Adaptive Amplitude Equalizer
4–6
TR-TSY-000752
Issue 1, October 1989
4.4
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
Formula for Calculating Dispersive Fade Margin
Frequency selective dispersive fading is caused by interaction of two or more arrivals of the
transmitted signal on different paths through the atmosphere. During such "multipath
fading" conditions, the relative amplitude and phase relationships of the arriving signals
may add or partially cancel each other, creating spectral distortions that often appear as a
"notch" or a slope across the frequency band.
When the dominant or the stronger component is the shorter path and the weaker signals
arrive with a phase delay, the resultant fading is defined as a minimum-phase fade. When
the stronger received signal component arrives after the weaker signal, the resulting fade is
termed a non-minimum phase fade.
During moderate fading conditions, minimum-phase fades dominate because the stronger
signal is direct line-of-sight and, thus, the first to arrive. During severe fading conditions,
on rare occasions, the longer propagation paths may deliver the stronger signal producing
nonminimum phase fades. The occurrence of these two types of fades becomes likely when
the arrival signals are comparable in strength. Under those conditions, the fading is highly
dispersive with Inband Power Differences (IBPDs) exceeding 15 to 20 dB.
For a given digital radio system, one obtains two W-curves: one for minimum phase fades
and the other for nonminimum phase fades. The integration of the joint probability density
of B and f0 over the area above the W-curve gives the dispersion-caused outage probability.
Rummler[6] provides the equations for calculating the dispersion-caused outage time in a
heavy fading month on the 26-mile Atlanta-to-Palmetto path based on these measured Wcurves. This procedure yields two outage times: one for minimum phase fades and the other
for nonminimum phase fades. The average of these two values gives the outage time, Td,
caused by multipath dispersion, assuming that the occurrence probabilities for minimum
and nonminimum phase severe fades are approximately the same.
The Fd for the laboratory-tested digital radio system can then be calculated by substituting
the calculated Td into Equation (2). This process yields the following equation:
F d = 17.6 – 10 Log 10 ( S w ⁄ 158.4 )
dB,
(8)
where
+39.6
Sw =
∫–39.6 [ Exp ( –Bn ( f ) ⁄ 3.8 ) + Exp ( –Bm ( f ) ⁄ 3.8 ) ] df
(9)
for calculating the Fd, on the Atlanta-to-Palmetto path, and where Bm(f) and Bn(f) represent
the minimum and nonminimum phase W-curves, respectively.
Equation (8) includes the following two correction factors:
• The multipath fading observed in June and July of 1977 and used in the Rummler
model is less dispersive by about 1.5 dB than the 5-year average data from the same
path reported by Ranade.[10] Equation (8) includes this correction to yield the 5-year
average Fd by subtracting 1.5 dB from that of June and July 1977.
4–7
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
• In digital transmission, a 1-second interval is considered an outage second if the
average BER for the particular interval exceeds 10-3. The channel amplitude dispersion
on the Atlanta-to-Palmetto path was scanned and recorded five times per second and
each scan represented a 0.2-second sample. This implies that the Rummler model uses
the 0.2-second interval as the basic time interval for the outage definition. For example,
a 0.2-second sample of the channel dispersion is classified as a 0.2-second outage if the
(B, f0) pair representing that sample is above the W-curve. The total outage time of a
digital radio hop depends on the length of basic time interval in the outage definition
because of the burst nature of the transmission errors. The difference between l-secondbased and 0.2-second-based outage definitions results in a 1.4-dB difference in the Fd.
Equation (8) includes this correction to conform to the regular outage definition using
1-second interval by subtracting 1.4 dB from that based on 0.2-second outage
definition.
4.5
Dispersive Fade Margin with Optional Adaptive Equalizers
A digital radio system usually provides a typical configuration with a standard adaptive
equalizer (e.g., adaptive amplitude equalizer) for normal application and provides some
options of more elaborated equalizers (e.g., a transversal equalizer) for radio paths with
severe dispersive fading.
The manufacturers are required to provide the W-curves and the Fd not only for the system
with the standard adaptive equalizer but also for the optional configuration with more
powerful equalizers.
4.6
Qualifications to Calculated Dispersive Fade Margin
The Rummler model is deduced from the data measured from the Atlanta-to-Palmetto path.
The value of Fd obtained through this model, therefore, is applicable only to those radio
paths with multipath dispersion characteristics similar to that of Atlanta-to-Palmetto path.
The Fd of a digital radio system, obtained by the laboratory fade simulator process described
in Section 4.4, may be optimistic because of the following factors:
• The W-curve measurements are essentially a static dispersive stressing test that does
not include the effect of interaction between the rapid dynamic variation of multipath
dispersion and the hysteresis of the digital radio systems.
• Some radio paths use horn reflector antennas with long WC-281 circular oversized
waveguides that may contain round trip echoes with time delays of several hundred
nanoseconds. The magnitudes of these echoes are often enhanced substantially (> 10
dB) during multipath propagation conditions because of the variations in the angles of
arrival. During deep fades (e.g., >40 dB), these multipath enhanced echoes may cause
additional outages[11] not accounted for by the Rummler model.
4–8
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
• An undesirable side effect, the noise enhancement effect, of the adaptive equalization
of multipath dispersion is that it increases the total thermal noise power level in the
channel during a dispersive fade. [10] Normal flat fade, thermal noise fade, and the Fd
from the W-curves do not account for the fade margin degradation due to this noise
enhancement effect.
Despite these qualifications, the dispersive fade margins calculated by Equations (8) and
(9) using laboratory measured W-curves are very close (within 1 dB) to those measured
from the Atlanta-to-Palmetto path during typical fading periods. Therefore, the dispersive
fade margins calculated by Equations (8) and (9) are useful not only for comparing relative
performance of different digital radio systems but also for radio path engineering.
4.7
Hysteresis in Resynchronization and Reframe
A radio system with an elaborate adaptive equalizer, timing recovery circuits, and carrier
recovery circuits may have a substantial hysteresis that impacts the ability of the system to
cope with the rapid time variations of multipath dispersion.
The advance in adaptive equalization technology has increased the Fd to 40 dB or greater.
The average duration of outage (i.e., BER > 10 -3) with diversity protection is in the order of
1 to 2 seconds on a typical line-of-sight path. Furthermore, the probability distribution of
the outage duration is usually skewed such that the most probable outage duration is shorter
than the average outage duration. The hysteresis of the digital radio system shall not be
allowed to substantially increase the total outage time caused by multipath fading. The
average recovery time of the digital radio system from an OOF and out-of-synchronization
condition to the reframed and resynchronized condition shall be limited to 0.25 seconds or
less. No more than 5% of the recovery times shall exceed 0.5 seconds. The maximum
recovery time shall not exceed 2 seconds. The objective on the average recovery time is 0.1
seconds.
4.8
Hysteresis In an Adaptive Equalizer
In the measurement of a W-curve, the value of the critical notch depth, B3, for a given notch
frequency may be split into two values because of the hysteresis of an elaborated adaptive
equalizer. In other words, B3 depends on whether the notch depth is increasing from a small
value to a deep notch or decreasing from a deep notch to a shallow notch.
The reason for this dependence is that starting from a shallow fade condition, the receiver
is in a healthy state and can withstand substantial stress (i.e., deep notch) before the BER
reaches the outage value. Starting from a deep notch condition, the receiver may be in the
OOF and out-of- synchronization conditions such that no feedback information on receiver
eye-opening is available for controlling the elaborated equalizer (e.g., the transversal
equalizer). In other words, in the OOF and out-of-synchronization conditions the receiver
4–9
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
is operating without the benefit of the elaborated equalizer and must wait until the channel
dispersion decreases to a mild condition to recover.
Therefore, a digital radio system with substantial hysteresis requires four W-curves (two
for minimum phase fades and two for nonminimum phase fades) to characterize its
sensitivity to dispersion. If the system hysteresis causes more than a 2-dB split in the value
of B3, the manufacturer is required to provide the four W-curves and the two dispersive fade
margins for its system.
Let Fdh be the dispersive fade margin in dB calculated from the two W-curves obtained
when the notch depth is increasing from a small value to deep notch, and let Fdl be the
dispersive fade margin in dB calculated from the two W-curves obtained when the notch
depth is decreasing from a deep notch to a mild dispersion condition. Ranade’s analysis [12]
shows that the net Fd of the digital radio system with hysteresis is the average value of Fdh
and Fdl in dB; that is,
F d = ( F dh + F dl ) ⁄ 2 dB.
(10)
The objective is to have no hysteresis at the 10-3 BER threshold for any notch frequency.
If a manufacturer offers an adaptive equalizer as an option, then the W-curves and
dispersive fade margins should be provided with and without the option.
4.9
Other Diversity Protection
Some radio paths require other diversity protection such as space diversity, antenna pattern
diversity, or antenna angle diversity to meet the outage objective. The performance
improvement factor offered by the diversity protection depends on the algorithm used in
the diversity combiner. Some examples are the Intermediate Frequency (IF) in-phase
combiner, the IF soft switch, the IF minimum dispersion combiner, and the baseband bit
combiner (i.e., hitless switch). The manufacturers are required to describe the algorithms
used in their diversity protection systems.
Let S1 and S2 denote the two signals received by the two diversity branches. The
requirement on the diversity combiner is given for the following three ranges of power
levels of the received signals:
1. Down Fade Range
The requirement on the combiner is that the combiner output must provide a signal with
a BER < 10-5, if S1 and S2 are subject to the following conditions:
A. The power level of S1 is below (Rmax-25) and S1 is "bad" in the sense that a digital
radio receiver that is connected to this input signal will be in the outage state
(BER >10-3).
4–10
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
B. The power level of S2 is within the range ( R max –25 ) ≥ S2 ≥ ( R min + 6 ) and S2
"marginal’’ in the sense that a digital receiver connected to this input signal will
have BER = 10-6.
C. The power level of S2 is greater than the power level of S1.
The transmission errors in S1 and S2 can be caused by a low SNR, severe multipath
dispersive fading, or the combined effect of noise and dispersion. Section 2 defines
Rmax and Rmin.
The objective for the combiner is that the BER of the combiner output must not be
worse than the better BER of the two input signals. For example, a baseband hitless
switch (a bit combiner) can achieve this performance without the restriction S2 > S1.
2. Middle Range
The presence of a diversity combiner shall not degrade the background error
performance of a digital radio system during normal or mild fluctuation periods of the
input signals.
Under the following conditions, the output of the combiner must meet the error criteria
during normal operation as described in Section 3.
A. The power levels of both S1 and S2 are within the middle range, from (Rmax-10) to
(Rmax-25).
B. S1 and S2 may or may not be equal.
C. There is no notch caused by dispersive fading in S1 or S2.
D. The amplitude slopes across the channel in S1 and S2 are less than 2 dB.
3. Strong Upfade Range
The BER of the combiner output must not exceed 10-3 under the following conditions:
A. The power level of both S1 and S2 are in the strong upfade range, from (Rmax-3) to
Rmax ·
B. There is no channel dispersion.
This requirement includes the situations where S1 = S2 = Rmax.
The diversity combiner must have a sufficient dynamic range to accommodate the wide
variations of the power levels of S1 and S2 in the ranges described above. Furthermore, the
diversity combiner or switch must have sufficient capability to dynamically equalize the
time-varying delay and phase differences between the two received signals during normal
and fading conditions, especially on long paths (>60 miles). It is tentatively assumed that
the maximum delay difference to be accommodated is 100 ns. Field-measured data is
needed to improve this assumption.
4–11
Microwave Digital Radio Systems Criteria
SENSITIVITY TO MULTIPATH DISPERSIVE FADING
TR-TSY-000752
Issue 1, October 1989
The experimental data from a 64-mile path in Wyoming [13] and from a 30-mile path in
Texas[14] indicates that the space diversity improvement factor of the baseband hitless
switch is greater than that of the IF in-phase combiner. It is desirable, but not required, for
the manufacturer to provide not only the IF combiner but also the option of the baseband
hitless switch for difficult radio paths with very severe dispersive fading. The
characteristics of the baseband hitless or errorless switch should be similar to those
described in Section 8.4 for the frequency diversity switch.
4.10
Test Jacks of Propagation Conditions
The performance of an analog FM radio is strongly controlled by the total power fade depth
in the channel. Most of the analog radio systems have an easily accessible test jack of the
receiver IF Automatic Gain Control (AGC) voltage that is uniquely related to the total
power fade depth of the received signal. This indicator of the radio propagation condition
is often very useful in the troubleshooting or the investigation of the correlation between
radio fading activities and radio performance problems.
The performance of a digital radio system is controlled not only by the total power fade
depth but also by the dispersion in the channel. The AGC voltage alone is inadequate to
troubleshoot the digital radio performance problems. Therefore, a digital radio system must
provide easily accessible test jacks, not only for the IF AGC voltage, but also for an analog
voltage that represents the amount of the linear amplitude dispersion (i.e., the amplitude
slope) within the channel. This linear amplitude dispersion voltage is usually available
from the adaptive amplitude equalizer. It is desirable, but not required, to provide a test jack
that represents the IBPD within the channel at a given instant in time. The IBPD is the peakto-peak (i.e., the maximum-to-minimum) amplitude ratio in dB within a radio channel. For
a radio system that uses an RF AGC in addition to the IF AGO, easily accessible test jacks
must be provided to both AGC voltages. All of these jacks must have adequate protective
isolation (e.g., high input impedance) from the internal radio circuits so that an accidental
short circuit of these test jacks has no undersirable effects on the performance of the digital
radio system.
4–12
TR-TSY-000752
Issue 1, October 1989
5.
Microwave Digital Radio Systems Criteria
DIGITAL STREAM TIMING AND JITTER
DIGITAL STREAM TIMING AND JITTER
Timing operations in the digital signal stream, or jitter, are produced by terminals and lines
with repeaters. The jitter requirements consist of the following four aspects: jitter
accommodation at the DS3, DS2, DSC-l, or DS1 input to the system; jitter generation
within the system (with no input jitter applied); jitter transfer functions; and enhancement
by the system of jitter at the system input.
5.1
Jitter Accommodation
The jitter accommodation requirements are specified in terms of the amount of peak-topeak sinusoidal jitter that must be accommodated versus the frequency of that jitter. A
terminal, which includes a multiplex, must accommodate the specified jitter without
producing any errors when the terminal is looped back-to-back at the high-speed rate,
whether or not a standard interface level exists at that level. The requirements for input jitter
accommodation at each standard interface level are indicated in Section 7.1 of
TR-TSY-000499.[1]
5.2
Jitter Generation
Jitter is generated in the terminals and the line regenerators within a digital route. It
accumulates along the length of the route. Requirements on jitter generation are given in
terms of basic system requirements, which allow systems to perform properly and be
interconnected with other digital systems in the network. However, because jitter is
generated and accumulates in a distributed fashion, jitter requirements for individual
subsystems (such as regenerators and terminals) are identified. Meeting all the subsystem
requirements assures that the end-to-end system requirements are met.
The following are basic requirements for jitter generation when no input jitter is applied:
1. All system terminal options that include a multiplex must produce less than 0.3 time
slots of rms jitter and less than 1.0 time slots of peak-to-peak jitter at the output of the
terminal receiver when the terminal is looped back-to-back at the high-speed rate. This
requirement shall apply over the entire range of permissible input frequencies and
multiplex clock tolerances.
2. A protection switching section of the system of up to 250 miles in length, operating
between system terminals providing DSX-1, DSX-1C, DSX-2, or DSX-3 interfaces,
must produce less than 1.5 time slots of peak-to-peak jitter at any of the DS1, DS1C,
DS2, or DS3 rates.
5–1
Microwave Digital Radio Systems Criteria
DIGITAL STREAM TIMING AND JITTER
5.3
TR-TSY-000752
Issue 1, October 1989
Jitter Transfer Functions
The following jitter characteristics of the individual subsystems are relevant to the design
of the subsystems so that the basic system jitter generation requirements may be met when
the subsystems are combined. While subsystems built in accordance with the performance
indicated below result in a system that meets the basic system requirements of Section 5.2,
the requirements of Section 5.2 are controlling and must be met.
1. For all terminal options incorporating one or more demultiplexers and providing
standard (DSX-1, DSX-1C, DSX-2, DSX-3) or nonstandard interfaces, the
desynchronizer of each demultiplexer shall have a jitter transfer function within the
template and parameters indicated in Figure 7-3 of TR-TSY-000499.[1] This transfer
function is the ratio of the jitter at the desynchronizer output to the jitter at the point
where the signal has been demultiplexed from the higher rate to the lower rate, and any
stuffing pulses associated with multiplexing from the lower rate to the higher rate have
been removed. Requirements are given for demultiplexing between all standard
hierarchical rates up to and including DS3. Included is a specification for
demultiplexing between two rates, F and E, both higher than DS3, hierarchical or not,
with E less than or equal to 140 Mb/s, and a specification for demultiplexing any higher
rate, hierarchical or not, to the DS3 rate. If a demultiplexer is included that translates
from any rate higher than DS3 to either the DS1, DSC-l, or DS-2 levels, the
corresponding requirements in Figure 7-3 of TR-TSY-000499[1] for the demultiplexer
from the DS3 level to that level apply.
2. The jitter transfer function of a regenerator shall be within the limits of Figure 3.
5–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
DIGITAL STREAM TIMING AND JITTER
0.25
0.05
20 dB/DECADE
REGENERATOR
JITTER
TRANSFER
FUNCTION
(dB)
5 Hz
5 fC
BS x 3/14 x 10-3
f
BS = LINE BIT RATE OF SYSTEM
fC = MAXIMUM VALUE OF f2 FOR RECEIVER JITTER TRANSFER
FUNCTION FOR ALL TERMINAL OPTIONS
Figure 3. Regenerator Jitter Transfer Function
5.4
Jitter Enhancement
The basic requirement for jitter enhancement is that a system of up to 250 miles in length
adds less than 1.0 time slot of peak-to-peak jitter to an input signal having 4.0 time slots of
peak-to-peak jitter for each input interface option provided, for all jitter frequencies up to
f2 of Figure 7-1 of TR-TSY-000499.[1] Translation to the requirements of an individual
protection switching section is not readily done because multiplexes within a protection
switching section alter the jitter frequency and act on the input jitter amplitude nonlinearly.
For this reason, it is difficult to develop a requirement on the jitter enhancement
performance of a single protection switching section that assures proper end-to-end
performance when interconnected with protection switching sections of this or another
system.
There is an alternative to assure proper jitter enhancement performance. The specification
on jitter generation assures that the line of regenerators behaves properly from the
standpoint of jitter enhancement. The additional element that influences jitter enhancement
5–3
Microwave Digital Radio Systems Criteria
DIGITAL STREAM TIMING AND JITTER
TR-TSY-000752
Issue 1, October 1989
is the jitter transfer of the receiver terminal desynchronizer in tandem with any external
dejitterizer deployed (between the receiver terminal and system interface). This transfer
function must be within the limits and parameters indicated in Figure 7-3 of TR-TSY000499.[1]
5–4
TR-TSY-000752
Issue 1, October 1989
6.
6.1
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
OUTAGE CONSIDERATIONS
General
Customer-to-customer service objectives, weighted by typical network parameters, are the
basis for specifications of facility availability. Compliance with an availability requirement
is accomplished by adherence to the engineering guidelines for the particular facility under
consideration. Certain minimum requirements can be placed on system gain ( see Section
6.3), RF interference sensitivity ( see Section 6.4), multipath fading sensitivity ( see
Section 4), and equipment reliability ( see Section 6.5).
6.2
Channel Outage
A digital transmission channel is considered unavailable, or in complete outage condition,
when its error performance falls below a given threshold. Section 4.2 provides the
definition for channel outage.
6.3
System Gain
System gain characterizes the thermal noise performance of a stand-alone digital radio
transmitter-receiver pair. It is defined as the difference between the nominal power (in
dBm) measured at the waveguide output of the transmitter bay and the minimum power (in
dBm) measured at the waveguide input of the receiver bay for a given threshold of radio
performance. However, the insertion loss of one set of channel combining and separating
filters is to be included in the system gain value because they are integral to the basic
transmitter-receiver pair. Losses of additional filters or circulators required to combine
additional channels are considered part of the section loss. The radio performance threshold
is defined as
DS3 BER = 10-3.
The required minimum system gain is 100 dB.
System gain goes up with higher transmitter power, lower receiver noise figures, etc. It does
not depend on antenna sizes, waveguide length, or path length, nor does it include the
effects of any radio interference. It is understood, of course, that a high system gain value
alone does not guarantee overall good performance.
6–1
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
6.4
TR-TSY-000752
Issue 1, October 1989
Interference
The transmission performance of a digital radio system can be degraded by undue
sensitivity to the effects of either co-channel or adjacent channel interference.
6.4.1
Co-Channel Interference Sensitivity
The source of co-channel interference present at the RF input of a receiver can be a foreign
system transmitter or transmitters on a multihop system nominally directed to other
receivers. By definition, a co-channel interferer has the same nominal radio frequency as
that of the desired channel.
6.4.1.1
Theoretical SNR Versus BER
For reference purposes, let X dB be the idealized, theoretical SNR producing a DS3 BER
of 10-3 for the modulation scheme of the digital radio system (e.g., X = 17 dB for a 16-QAM
system). The manufacturer must state the theoretical SNR values at 10-3 and 10-6 BERs for
the modulation scheme employed in its digital radio system.
The theoretical SNR value of X dB is based on the assumption that thermal noise passed
through the receiver filter is the only impairment, and all other possible impairments are
negligible (i.e., no co-channel interference, no adjacent channel interference, no distortion,
no channel dispersion, and perfect timing and decision circuits). The receiver filter consists
of RF, IF, and baseband filters.
6.4.1.2
Co-Channel Carrier-To-Interference Ratio (CIR) Versus BER
These requirements apply when the only external performance impairment is the result of
a co-channel radio interference that is either a single tone within the channel or a digital
radio originated from a similar digital transmitter with a modulation scheme and filtering
arrangement identical to those of the desired system. Under this test, the BER is caused by
the combined effect of the external interference and the internal imperfections (such as
timing errors, and intersymbol interference resulting from distortion) in the digital radio
system.
The sensitivity of the receiver to a single, co-channel interference shall be such that a CIR
of X + 3dB at the waveguide input of the receiver bay produces a DS3 BER of 10-3 or less.
Furthermore, a CIR of X + 6dB at the waveguide input of the receiver bay shall produce a
DS3 BER of 10-6 or less.
The center frequencies of the desired and the interfering digital signal should be offset by
0.2 MHz in the measurement of the co-channel digital interference sensitivity. This slight
6–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
frequency offset ensures that the desired signal and the interference are incoherent. In the
case of a single tone interference sensitivity test, the single interfering tone can be anywhere
within the desired channel.
These requirements impose a limitation on the sensitivity of the system with internal
imperfections (such as timing errors and intersymbol interference resulting from distortion)
to an external co-channel interference. In these tests, a high SNR (e.g., 50 dB) should be
maintained to suppress the effect of thermal noise.
The manufacturer must state the actual measured CIR values at 10-3 and 10-6 BERs for its
system. In the CIR sensitivity tests, the digital bit stream should be a random or pseudorandom bit stream to yield an average carrier power. In other words, one should not use a
special bit pattern to achieve a carrier power that is substantially higher or lower than that
of a random bit stream.
6.4.2
RF Filter and Radar Interference
Many digital radio receivers use RF low-noise preamplifiers to reduce the system noise
figure and, hence, to improve the system gain and thermal noise fade margin. Some systems
use a wideband, common RF preamplifier shared by all the digital radio channels in the
same waveguide run. Although such a sharing arrangement saves some cost in RF
preamplifiers and filters, it exposes the digital radio channels to severe interference from a
high-power radar at some locations. For example, the Weather Surveillance Radar (WSR74C) operates in the frequency band from 5600 MHz to 5800 MHz with a typical output
power of 84 dBm. This type of radar exists at many major airports in the US and produces
periodic error bursts into some 6-GHz digital radio hops. Without an RF filter preceding
the preamplifier of the digital radio receiver, a high-power radar pulse, even though it is
outside of the common carrier band, can overload the wideband preamplifier and cause
large bursts of errors in the digital radio channels.
Therefore, the manufacturer must provide an option, at the user’s discretion, of an RF
blocking filter preceding the RF preamplifier to reject tile main lobe of the high-power
radar for application at locations where a radar interference problem exists. The RF
blocking filter must provide at least a 50-dB attenuation of the out-of-band strong
interference, such as radar, and less than a 1-dB loss for the desired inband signal. It is an
objective to provide an option of installing the per-channel RF low-noise preamplifier after
the RF channel dropping (separation) network and before the down-converter to minimize
the effects of the radar interference. The radio manufacturers are encouraged to develop
other technologies to combat the radar interference problems.
6–3
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
6.4.2.1
TR-TSY-000752
Issue 1, October 1989
Receiving Filter to Allow Co-Polar Adjacent Channel Operations
Because the transmission capacity of a digital radio route will approach exhaust, it is an
objective to retrofit the digital radio route for co-channel dual polarization operation to
double the transmission capacity. This will defer the high cost of constructing a new
transmission route.
TA-422-23231-84-01[15] is a preliminary Technical Advisory on co-channel dual
polarization digital radio systems. Anticipating this co-channel dual polarization retrofit in
the future, it, is an objective that a sufficient portion of the Nyquist pulse shaping filtering
be allocated to the receiver to provide substantial rejection of interference from adjacent
channels that are operating on the same polarization with the desired channel. An
alternative is to design the single polarization system such that the pulse shaping filters can
be easily replaced in the future for dual polarization operation.
6.4.3
Adjacent Channel Interference Sensitivity
Protection against adjacent channel interferences requires control of the transmitted
spectrum, sufficient filtering within the desired receiver, polarization isolation achieved by
using orthogonal polarizations for the adjacent channel pair, and antenna side-to-side
coupling loss. Controlling polarization isolation and antenna side-to-side coupling loss is
the responsibility of the user; sufficient transmitter and receiver filtering is the
responsibility of the manufacturer.
Future growth of traffic may require the use of co-channel dual polarization operation to
double the channel transmission capacity. For a co-channel dual polarization operation,
each radio channel has four adjacent channels: two are on the same polarization of the
desired channel: and the other two are cross-polarized. The filtering requirements for copolar adjacent channel pairs, as described in TA-422-23231-84-01,[15] are much more
stringent than those for cross-polar adjacent channel pairs because of the loss of crosspolarization discrimination. It is desirable, but not required, that the Nyquist pulse shaping
filters of the current digital radio system be designed so that they can be retrofitted in the
future to meet the adjacent channel interference requirements of co-channel dual
polarization operation.
6.5
Equipment Reliability
Equipment reliability is a measure of the frequency of equipment failure during use over
the long term. This measure may be given as a failure rate or, alternatively, as the Mean
Time Between Failures (MTBF). The definition assumes that failures are randomly
occurring events and that constant failure rates are physically meaningful for the cases
under consideration. Methods of calculating the MTBF shall be consistent with those
described in TR-TSY-000332.[16]
6–4
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
Section 3.2 of TR-TSY-000499[1] contains a further discussion of equipment reliability
prediction.
6.6
System Reliability Generic Requirements
BCC outage objectives for radio systems are intended to control outage duration and
frequency of interruptions as a function of the system length. The overall objective is
allocated to major failure mechanisms. For digital radio systems, most of the outage time
and, essentially, all the interruptions are allocated to propagation disturbances, which
leaves very little allocated to equipment failures. As noted in Section 1.5, there are many
applications for such systems. Equipment failure protection would be provided either by a
hot standby system or by a 1×N frequency diversity system. A minimum MTBF
requirement of 1 year applies to an unprotected one-hop, one-way transmitter-receiver pair
plus one pair of digital terminals and processors.
6–5
Microwave Digital Radio Systems Criteria
OUTAGE CONSIDERATIONS
6–6
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
7.
Microwave Digital Radio Systems Criteria
SYSTEM GAIN AND RADIO RECEIVER DYNAMIC RANGE
SYSTEM GAIN AND RADIO RECEIVER DYNAMIC
RANGE
During some anomalous propagation conditions, increases in the received signal (i.e., the
upfade) of 15 dB or more above normal level have been observed on line-of-sight
paths.[17][18][19] On a typical line-of-sight path, the total transmitter output power is about
60 dB higher than the normal received power. The strong upfades are believed to be caused
by the anomalous atmosphere on the radio path acting as a lens to focus the microwave
beam into the receiving antenna. [17]
The strong upfades can overload the radio receiver and cause a degraded performance or
an outage (BER >10-3) because of the nonlinear distortion of the digital signal. Most radio
paths with substantial fading activities require an upfade margin of at least 15 dB to reduce
the upfade-caused outage time to an acceptable level.
Therefore, the digital radio system must be designed to accommodate up to 15 dB of
upfades on most radio paths without causing an outage or permanent dynamic to the
receiver. Such upfades must be accommodated with or without a diversity combiner.
The manufacturer must state the maximum tolerable received RF signal level, Rmax (in
dBm), that causes a DS3 BER of 10-3.
A digital radio receiver has a maximum tolerable received RF power, Rmax, and a minimum
tolerable received RF power, Rmin, that result in a range of received power levels where the
receiver BER is better than 10-3. Rmax is set by the receiver nonlinear distortion and Rmin is
set by the receiver thermal noise. The range of the received RF power level, Rmax — Rrnin
(in dB), is defined as the "dynamic range" of the digital radio receiver.
The minimum acceptable dynamic range for 4-GHz and 6-GHz systems, with 60 dB as an
objective, is 55 dB. This provides a 15-dB upfade margin and a thermal noise fade margin
of 40 dB for downfade. The minimum acceptable dynamic range for 11-GHz systems shall
be 65 dB, with an objective of 70 dB. This provides a 15-dB upfade margin, and a thermal
noise fade margin of 50 dB for downfade.
However, the objective on the receiver dynamic range is 60 dB because of the following
considerations. The advance in adaptive equalization technology has increased the
dispersive fade margin ( see Section 4) of digital radio systems to 40 dB or greater.
Findings[7][8][20] indicate that the frequency diversity improvement factor of dispersioncaused outage is greater than that of thermal-noise caused outage by at least one order of
magnitude if the dispersive fade margin (see Sections 4.2 and 4.6) and the thermal noise
fade margin are equal. This means that if the digital radio system is protected by a hitless
frequency diversity switching system (see Section 8.4), then the dispersion caused outage
time is less than thermal-noise-caused outage time by at least one order of magnitude if the
dispersive fade margin is equal to thermal noise fade margin. An increase in the thermal
noise fade margin beyond 40 dB is a very effective way of reducing the total outage time
of a frequency-diversity-protected digital radio system. Therefore, it is desirable to have the
thermal noise fade margin greater than 45 dB on most radio paths. The thermal noise fade
7–1
Microwave Digital Radio Systems Criteria
SYSTEM GAIN AND RADIO RECEIVER DYNAMIC RANGE
TR-TSY-000752
Issue 1, October 1989
margin can be increased by increasing the system gain through lower R min or higher
transmitter output power. The objective on the dynamic range of the receiver is 60 dB or
greater. Similarly, the required minimum system gain is 100 dB, and the objective on
system gain is 105 dB or greater. The manufacturers are required to state the dynamic range
of their digital radio receivers and the system gain of the complete radio system.
If the measured dynamic range, system gain, or R max varies substantially (> 3 dB) from one
bay to another because of the manufacturing variations, then the manufacturer must provide
a guaranteed value for all the bays shipped from its factory.
If a radio receiver uses an RF AGC circuit to accommodate upfade, an easily accessible test
jack of RF AGC voltage must be provided for monitoring upfade activities and for
calibrating IF AGC voltage for downfade activity.
7–2
TR-TSY-000752
Issue 1, October 1989
8.
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
PROTECTION SWITCHING
8.1
Introduction
To increase the system reliability, the radio system usually employs some type of protection
switching scheme.
A protection switching system alleviates the effects of radio equipment failures and
anomalous atmospheric conditions (e.g., multipath fading). Space-diversity, antenna
pattern diversity, antenna angle diversity, or frequency-diversity protection reduces the
effects of multipath fading. Equipment protection is provided by either hot standby or
frequency-diversity systems. Hot standby protection is applied for each transmitter and
receiver. Frequency-diversity protection is applied on a switch section basis where, by
definition, a switch section comprises one or more hops (see Figure 4). However, frequency
diversity may not be available or permitted on routes with few digital radio channels.
RT
DT
PROT CH
RR
DR
RT
RR
DT
RR
DR
RT
RR
DT
DS3
DS3
DT
RT
DS3
DS3
MKG CHS
RR
RT
DT
DR
DT
RR
RT
REC
TRS
SERVICE CHAIN
SWITCH
SWITCH
PROT SWITCH
OTHER
DIRECTION OF
BRIDGE
TRANSMISSION
SERVICE CHANNEL
MUX
PROT
SWITCH
ALARM
CENTRAL
ORDER
WIRE
MUX
ALARM
REMOTE
MUX
ORDER
WIRE
ORDER
WIRE
(ANALOG OR DIGITAL)
PROT
REMOTE
SWITCH
LOCAL ALARMS (FROM MONITORS)
LOCAL ALARMS (FROM MONITORS)
CONTROLS
CONTROLS
DR
= FIGITAL REGENERATOR
DT
= DIGITAL TERMINAL AND SIGNAL PROCESSOR
RT
= RADIO TRANSMITTER
RR
= RADIO RECEIVER
OS
Figure 4. Digital Radio Switching Section and Interfaces With Service Channel,
Order Wire, Monitors, and Alarm and Control Equipment.
8–1
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
8.2
TR-TSY-000752
Issue 1, October 1989
Protection Switching Threshold
8.2.1
Protection
Section 5.2.2 of TR-TSY-000499[1] shows required ranges of the BER threshold T, which
initiates protection switching for radio systems.
The protection switching threshold shall have a hysteresis of at least a factor of 10 in the
sense that if the protection switch threshold is 10-6, then the switch from the protection
channel back to the working channel requires the BER of the working channel to be better
than 10-7. It is desirable, but not required, that the system have a second switching threshold
in the range of 10-4 to 10-3, and that priority be given to a failed channel (higher BER) over
a channel operating at a marginal (lower) BER.
8.2.2
Restoration
After restoration of a failed working line, the load may continue to be carried by a
protection line (nonreverting switching), or it may be switched back to the working line
(revertire switching). When revertive switching is used, it is required that the hysteresis
method of restoral be used. Section 5.2.5 of TR-TSY-000499[1] shows the requirements for
revertive switching and hysteresis factor.
8.3
Detection Time
Detection time is the time required to determine if a given BER threshold is being
exceeded. Section 5.3.2 of TR-TSY-000499[1] contains requirements for digital radio
systems with hitless frequency-diversity protection switching.
8.4
Hitless Frequency Diversity Switch
Recent field measured data[20][21] and modeling[7][8] indicate that frequency diversity can
reduce the multipath dispersion-caused outage time of digital radios by a very large factor
(>50). The use of frequency diversity for digital radios can result in substantial cost savings
by:
• Allowing longer hop length
• Avoiding unnecessary space diversity
• Avoiding unnecessary addition of new radio repeater stations in the conversion of a
long analog radio hop to a high-capacity digital radio hop
8–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
• Avoiding unnecessary replacement of long analog radio hop by more expensive digital
cable transmission facilities.
To achieve such cost savings, the digital radio system must be equipped with a hitless
frequency diversity switch and a fast switch initiator driven by a fast BER estimator.
The requirements for the hitless frequency diversity switch are:
1. The number of transmission errors measured at the DS3 level, caused by the protection
switching transient, must be less than ten. The objective is to have no switching-caused
errors.
2. The switching system must have a fast BER estimator and a fast switch initiator such
that the average time delay between the onset of the BER reaching 10-3 and the
completion of the frequency diversity switch is less than 50 ms. This requirement
prevents ongoing phone call cut-offs due to false signaling to some voice circuits that
are still using inband signaling.
3. The switching system must have sufficient capability to dynamically equalize the time
varying delay difference between the working channels and the protection channel
during normal and fading conditions, especially on long paths (>60 miles). It is
tentatively assumed that the maximum delay difference to be accommodated is 100
ns.[22][23] More field measured data is needed to improve this assumption.
4. The amplitude of the digital pulse stream at the output of the frequency diversity switch
shall not change by more than 2 dB before and after the switch, to prevent undesirable
impacts on the other downstream digital subsystems.
The manufacturers are required to state:
A. The average number of errors at DS3 level caused by the diversity switching transient
B. The average duration from the onset of the BER reaching 10-3 to the completion of the
protection switching
C. The maximum delay difference (in nanoseconds) between the working channel and the
protection channel that can be dynamically accommodated by the protection system
with hitless switching
D. At the output of the frequency diversity switch, the maximum change (in dB) of the
amplitude of the digital pulse stream before and after a switch.
The onset of the BER reaching 10-3 is defined as the end of a millisecond interval when the
number of bit errors in the millisecond interval is equal to or greater than 45.
8.5
Other Hitless Switches
Space diversity or antenna angle diversity can be provided without using switches (e.g., the
signals available from the separate antennas could be continuously combined). In this case,
8–3
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
TR-TSY-000752
Issue 1, October 1989
there are no switch transfers and, therefore, there are no requirements on them. However,
space diversity or antenna angle diversity can also be implemented using switching
between the digital streams provided by separate receiving equipment. For normal diversity
switching (excluding equipment failures), each operation of such a switch should cause less
than ten bit errors in the digital streams.
8.6
Switching Times
In the case of equipment failures (sudden signal interruptions), there will be a finite time
required to sense the loss of the signal and to transfer the signal from the failed channel to
the hot standby or frequency-diversity protection channel. Once a decision has been made
to switch to a protection line, the limitation on the additional time to complete the switch is
as described in Section 5.2.4 of TR-TSY-000499.[1]
8.7
Error Performance During Switching
It is an objective that protection switching introduce no errors. It is a requirement that radio
systems use hitless frequency diversity protection switching. Section 5.2.6 of TR-TSY000499[1] contains the number of errors per switch.
8.8
Protection Switch Availability and Reliability
Failures of the protection switching equipment can have a significant effect on the transport
system availability and reliability.
8.8.1
Silent Failures
The protection switching is normally monitored for internal troubles. Even with
monitoring, silent failure conditions can exist that give no trouble indication until a
protection switch is required. This results in a service outage from a combined failure of the
radio and the switch.
8.8.2
Protection Switch Exercising 1XN)
To reduce the silent failure rate, the diversity protection switching equipment shall have an
exerciser that automatically exercises all switching circuits up to, but not including, the
final transfer switch as specified in Section 5.4.2 in TR-TSY-000499.[1] Outage caused by
silent failures must be small compared to the total two-way DS3-to-DS3 outage time.
Section 5.4.3 of TR-TSY-000499[1] contains the limits for silent failure outage.
8–4
TR-TSY-000752
Issue 1, October 1989
8.9
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
Switch Initiation
Switch initiation can be done using either analog or digital methods to determine whether
the radio line error rate exceeds one or more performance thresholds. The BER thresholds
must be within the range of 10-3 to 10-7. Whatever method is used, a high correlation (within
a factor of four) is required between the output of the switch initiator circuit and the true
line error rate for each initiation threshold. For example, a protection switch must be
requested when the true radio line BER is somewhere between 2.5(10)-4 and 4(10)-3 when
averaged over a maximum of 50 ms.
8.10
Supplier-Provided Information
While only certain items are needed for particular systems, it is desirable that as much of
the combined data as possible be supplied. Suppliers are required to provide the
information described in Section 5.5.2 of TR-TSY-000499.[1]
8–5
Microwave Digital Radio Systems Criteria
PROTECTION SWITCHING
8–6
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
9.
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
MONITORING, ALARM, AND CONTROL
9.1
General
Sections 9 through 12 describe the various maintenance features and subsystems required
for operation of a digital radio system. Figure 5 depicts a block diagram for a maintenance
system. The essential elements of radio system maintenance are:
1. Local on-site monitoring capability to detect and localize system problems
2. Remote surveillance capability sufficient to detect and isolate system problems to the
faulty location (e.g., always to the faulty hop and, where possible, to the faulty end of
that hop)
3. Two-way communication channels to provide (over the radio) paths for the alarms,
status, control, and orderwire signals as well as an interface to transfer alarm, control,
and voice between the radio system and one or more attended locations (not usually
collocated with the radio).
INTERFACE
RADIO
SITE
RADIO
RADIO
SITE
LINE
W/SERVICE
CHANNELS
RADIO
RADIO
LINE
W/SERVICE
CHANNELS
TO
SERVICE
CHANNEL
RADIO
EQPT
ALM
CENTRAL
0W
OW
ALM
MEM
LCL
ALMS
OTHER
ALARMS
ALM
LOCAL
RADIO
ALMS
ALARM
CENTRAL
OR RCVR
CONTROL
REMOTE
CONTROL
RADIO SITE
VOICE
CHANNELS
FOR OW ALM
& CONTROLS
FROMSERVICE
CHANNEL
OW
MON
BCC
I
N
T
E
R
F
A
C
E
ALM
&
CONTROL
(E2A)
DISPLAY
RADIO TERMINAL OR
ALM CENTRAL
= TYPICAL (OPTIONAL)
INTERFACE POINTS IN
A MODULAR SYSTEM
BCC
TRANSMISSION
SURVEILLANCE
& OS
Figure 5. Block Diagram on Maintenance System
9–1
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
TR-TSY-000752
Issue 1, October 1989
A BCC may wish to use a system that incorporates the numbered elements completely
supplied by the manufacturer or may elect to add only certain elements to existing
equipment. Therefore, a manufacturer shall offer the above items in a modular arrangement
for selection by the BCC. Sections 10.2 and 10.3 provide further detailed requirements.
Additional information on monitoring and alarm system objectives and principles is
contained in PUB 49001,[24] TR-TSY-000474,[25] TR-TSY-000475,[26] TR-TSY000481,[27] and TR-TSY-000191.[2] Monitoring a system in greater detail should make the
system easier to maintain. It is usually the responsibility of the manufacturer to determine
the type and number of functions required to properly monitor system performance and to
efficiently locate problems. The following sections specify certain minimum requirements
for functions that are essential.
9.2
Local Monitoring
Local monitoring should be sufficient to enable rapid isolation and repair of all on-site
problems. To achieve this goal, certain minimum requirements are essential.
1. The functions to be monitored for each transmitter (working and protection) shall
include:
A. Presence of a signal at each input to the modulator
B. RF power at the transmitter output.
2. The functions to be monitored for each receiver (working and protection) shall include:
A. AGC voltage to determine relative received RF signal power
B. Linear amplitude slope voltage to indicate channel dispersion
C. BER of the received digital stream (e.g., an arbitrary [manufacturer’s choice] subset
or function of the received bit pattern must be monitored; the monitoring sensitivity
must be sufficient to detect BERs of 10-6 or greater).
3. The functions to be monitored on the protection switching equipment shall include:
A. Status (e.g., equipment presently used for service and equipment presently used as
standby or diversity)
B. Availability and quality of the protection switching signaling channel.
Implicit in these requirements is monitoring capability sufficient to indicate trouble-free
availability of diversity radio equipment and potential satisfactory operation of the
protection system.
9–2
TR-TSY-000752
Issue 1, October 1989
9.3
9.3.1
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
Remote Monitoring, Alarm, and Control
Remote Monitored Information
All remote monitored information must be available at the local site to be observed by
craftspeople. A subset of the monitoring information contained in Section 9.2 will be
remoted to a central location, either directly by a BCC surveillance system or via an integral
alarm system. It is a requirement that remote monitoring information be sufficient to
sectionalize a system failure to a particular radio hop. It is an objective that most failures
may be further sectionalized to either the transmitting or receiving station of that radio hop.
9.3.2
Remote Alarm and Control Indications
The philosophy regarding indications, alarms, and controls remoted to a surveillance center
is somewhat different than that used for local monitoring At the alarm center, it is generally
not necessary to determine specifically the faulty component of the monitored equipment,
but rather to determine the location, the seriousness, and the general nature of the fault. This
philosophy is detailed in PUB 49001,[24] which the manufacturer should review to
determine the indications and controls to make available for remoting. It is expected that
all functions listed in Section 9.2 for local monitoring will usually be included.
NOTE
Such functions as received AGC, transmitter
power, and BER would be remoted as status
relative to one or more threshold values.
9.3.3
Telemetry Memory or Stretching
Memory or stretching shall be provided (15 seconds) for short duration events where it is
determined that knowledge of such events (e.g., error bursts and protection switching) is
needed to properly maintain the digital radio system. Memory refers to holding an
indication in a telemetry remote until it is scanned. Stretching refers to a feature of the
monitoring equipment in which an indication, once set, remains set for a predetermined
time to ensure that the point is scanned and the indication reported even if the monitored
point quickly returns to normal status. Latched alarms, which hold an indication
indefinitely until released by external commands, are unacceptable.
9–3
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
9.3.4
TR-TSY-000752
Issue 1, October 1989
Alarm Interface Aspects
The technical aspects of the interface between BCC centralized alarm systems and radio
and protection equipment are covered in PUB 49001. [24] It is required that all radio and
protection alarm circuitry be compatible with BCC surveillance systems as described in
PUB 49001,[24] or, if the radio system incorporates its own remote alarm system, that alarm
system must comply with PUB 49001.[24] In PUB 49001,[24] it is important to note that
BCC computerized surveillance systems generally do not provide memory or decoding.
Where the computerized systems are used, an indication must remain standing 15 seconds
(worst case) before the indication is guaranteed to be sensed by the alarm central. Relatively
short disturbances (e.g., BER degradation, multiplex reframes, and carrier group alarms)
can seriously disturb service; that is the reason for the requirement for memory or stretching
as noted above.
9.3.5
Fail-Safe Alarm and Control System
The alarm and control system should be essentially fail-safe. For example, an alarm shall
be initiated upon failure of the alarm system power supply. The alarm function shall cause
an alarm for loss of dc power to a transmitter or receiver.
9.3.6
Alarm System Capability
In addition to alarms associated with the digital radio equipment, the alarm system shall
have the capability for at least 16 station housekeeping alarms and 1 change-of-status
alarm. The control system shall have the ability to initiate a protection switch from the
alarm central.
9.4
9.4.1
Operations and Maintenance
Remotable Fault Locating
It is a requirement that a method be provided to locate faults from a remote location as well
as from a terminal office. From the remote location, the capability must exist to localize a
problem to the faulty location (i.e., always to the faulty hop and, where possible, to the
faulty end of the hop). The fault-locating method must have the capability to be remotely
controlled by an operation support system (provided by the BCC). The interface to the
operation support system is described in TR-TSY-000475[26] and TR-TSY-000481.[27]
9–4
TR-TSY-000752
Issue 1, October 1989
9.4.2
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
Performance Monitoring
Microwave digital radio transmission system shall provide the capability to remotely
monitor their performance on an in-service basis. The capability shall be provided through
a set of functions to gather, store, threshold, and report various performance-related
parameters.
This section lists and defines the specific DS3 performance monitoring parameters to be
collected. The collection, storage, and thresholding requirements applicable to these
parameters are given in TR-TSY-000475.1[26] Parameter reporting functions, protocols,
and application messages are given in TR-TSY-000481[27] and TR-TSY-00083.[28]
The performance monitoring functions shall be provided for the following:
1. Each DS3 (metallic) line terminated at the DSX side of the microwave digital radio
system
2. Each working or protection DS3 channel carrying a portion of a DS3 path.2
The remainder of this section lists and defines the specific DS3 impairment events and their
associated performance monitoring parameters.
9.4.2.1
DS3 Performance Impairment Events
This section lists and defines the impairment events, which define the DS3 performance
monitoring parameters applicable to microwave digital transmission systems. The first
event in the list pertains to each DS3 (metallic) line terminating at the DSX side of a system.
The remaining three relate to the working or protection DS3 lines (or channels) within the
system.
Line Code Violation (LCV) - An LCV is the occurrence of a received bipolar violation on
a DS3 line that is not part of a Bipolar with 3 Zero Substitution (B3ZS) code.
P-Bit Parity Violation - This event is the occurrence of a P-bit parity violation on a
received DS3 M-frame. The receipt of nonidentical P-bits corresponding to the same DS3
M-frame also constitutes a parity violation.
Out-Of-Frame (OOF) - OOFs are declared by online framers immediately on the
detection of a particular density of framing bit errors (i.e., n or more errors in m consecutive
1. Bellcore is currently participating in a T1M1.3 project to draft a digital transmission performance
monitoring standard. In conjunction with that effort, the DS3 performance monitoring definitions and
requirements are currently under review and completion at Bellcore. When completed, these definitions
and requirements will be reflected in TR-TSY-000475[26] and are expected to he consistent with the
upcoming T1M1.3 standard.
2.
Refer to TR-TSY-000475[26] for a detailed description of lines and paths as monitored transmission
entities.
9–5
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
TR-TSY-000752
Issue 1, October 1989
F-bits). Specified values of n and m for DS3 are 3 and 16, respectively, although other ratios
are acceptable.
Once an OOF is declared, the framer searches the bit stream for the correct frame position.
The OOF state persists until the proper frame position is located. Otherwise, a Loss-OfFrame (LOF) condition is declared after an appropriate integration process. An OOF is
declared even though the search may effectively result in maintaining the same frame
alignment.
Change Of Frame Alignment (COFA) - COFAs are declared by offline framers. In this
case, when the same error density of n or more out of m F-bits is observed, the offline
framer begins to search the bit stream for the correct frame alignment. The search proceeds
without affecting the existing frame alignment until the correct frame alignment is
identified. Otherwise, an LOF condition is declared after an appropriate integration
process. At the conclusion of the search, if the old frame alignment is found to have been
correct (i.e., the framing bits just happened to be in error), no further action is taken.
However, if a different frame alignment is found, a COFA is declared.
An OOF event is declared as soon as the framing bit error pattern is observed. A COFA is
declared only if the current frame alignment is found to be incorrect.
To unify the terminology associated with the above framing impairments, the "n or more
errors in m consecutive F-bits" criterion that triggers the frame search procedure in online
and offline framers is referred to as a Severely Errored Framing (SEF) event.
9.4.2.2
Performance Monitoring Parameters
The performance monitoring parameters applicable to DS3 lines terminating at the DSX
side of the system are:
LCVs - this parameter is a count of the LGVs occurring over the measurement interval.
Line ESs - This parameter is a count of 1-second intervals containing one or more LCVs.
Line SESs - This parameter is a count of 1-second intervals containing 44 or more LCVs.
Assuming uniformly distributed bit errors, this corresponds to an approximate BER of
10-6 for the DS3 line.
The performance monitoring parameters applicable to each working or protection DS3 line
(or channel) on the radio system are:
Code Violations - This parameter is a count of P-bit parity violations during the collection
period.
Errored Seconds (ESs) - This parameter is a count of 1-second intervals containing one or
more P-bit parity violations or one or more SEF events.
9–6
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
Severely Errored Seconds (SESs) - This parameter is a count of 1-second intervals
containing 44 or more P-bit parity violations or one or more SEF events. Assuming
uniformly distributed bit errors, the 44 or more P-bit parity violations correspond to an
approximate BER of 10-6 for the DS3 channel.
SEF Seconds - This parameter is a count of 1-second intervals containing one or more SEF
events, as defined above.
In addition, the following parameters relate to protection switching and are to be collected
for each working radio line:
Protection Switching Count - This parameter is the number of times service is switched
from a working line to protection line, or returned from a protection line to the working line.
For non-revertive protection switching systems, this parameter counts only the number of
switches from a working line to a protection line.
Protection Switching Duration - This parameter is the length of time, in seconds, during
which service is switched from a working line to a protection line. This parameter does not
apply to nonrevertive protection switching systems.
9.4.3
Electrical, Technical, and Applications Interfaces
Bell System Publication 49001,[24] and TR-TSY-000474,[25] TR-TSY-000475,[26] and TRTSY-000481[27] provide the electrical and technical interfaces between the lineterminating equipment and the BCC performance monitoring remote unit.
Essentially, the electrical interface must conform to Electrical Industries Association (EIA)
Standard RS422, and the technical interface must conform to TR-TSY-000474,[25] TRTSY-000475,[25] and TR-TSY-000481.[27]
9–7
Microwave Digital Radio Systems Criteria
MONITORING, ALARM, AND CONTROL
9–8
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
TROUBLE SECTIONALIZATION
10. TROUBLE SECTIONALIZATION
10.1
Downstream Alarm Prevention
A digital radio route can be made up of one or more switching sections. Upon a failure in
any particular section, office and remote alarms should be initiated. The service carried on
the defective equipment should be switched to the protection equipment (e.g., either
frequency-diversity or hot standby equipment). In the case where the protection equipment
is unavailable and the digital stream is lost or the BER exceeds 10-3, the digital radio shall
provide a means (such as Alarm Indication Signal [AIS] in TR-TSY-000191[2]) at the
output of the switching section in trouble that prevents downstream radio or high-level
multiplex alarms.
10.2
Switching Section
For 1×N frequency-diversity systems, the term switching section is well-defined (see
Figures 1 and 4). For hot standby systems, switching section may be interpreted as being
located between DSX-3 points or between drop/add or terminal and terminal locations.
10.3
Parity Restoration
To isolate a switching section causing logical errors (Cyclic Redundancy Check [CRC] or
equivalent), correct format must be restored at the output of the troubled switch section per
TR-TSY-000191.[2] This requires adherence to the signal format defined in Section 3.1.
Once a trouble has been isolated to a switching section, the faulty equipment in the section
can be determined from either in-service monitoring or out-of-service tests. The most
efficient method of fault locating is to have a performance monitor at each intermediate
station in the switching system, as discussed in Section 9. The fault can then be isolated via
the remote alarms to the transmitter-receiver parity of a single hop.
10–1
Microwave Digital Radio Systems Criteria
TROUBLE SECTIONALIZATION
10–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
ORDERWIRE
11. ORDERWIRE
The office orderwire equipment provides voice communications between stations (see
Figure 4). This equipment is a required feature of a digital radio system. The requirements
for an orderwire system are:
1. Transmission Level Points (TLPs) for optional off-premises extension
A. -16-dB transmit
B. +7-dB receive
2. 600-Ω resistive balanced input and output impedance
3. Interstation signaling with an audible output separate from the voice energy, with
broadcast and selective signaling capability from the central to the remote station, and
selective signaling capability from the remote station to the central location
4. The orderwire equipment at each station shall be a two-way bridge on the 4-wire
orderwire circuit.
11–1
Microwave Digital Radio Systems Criteria
ORDERWIRE
11–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SERVICE CHANNEL
12. SERVICE CHANNEL
12.1
Background
A service channel is the means for transmitting voice (orderwire), protection switching, and
maintenance (monitoring alarm and control) information between stations in a radio route
( see Figure 4). The service channel is a required feature, but it is optional for the user to
take economic benefit from the prior existence of interstation service channel facilities.
12.2
12.2.1
Service Channel Interface and Requirements
Service Channel Remoting
Input to and output from the service channel shall be through analog voice frequency
circuits if the service to be transmitted (orderwire, protection switching signals, monitoring,
alarm, and control) so requires ( see Figure 4). This is the case, for instance, when General
Purpose Orderwire (GPOW) or alarm equipment (E2A) is to be used. If the manufacturer
chooses to provide an integrated service system, no requirements are given for the service
channel internal interfaces. Remoting capability is always required for orderwire,
monitoring, alarm, and control functions. The following requirements must be met by the
service channel:
1. Total system noise in the orderwire channel shall be less than 45 dBrnc0 for a system
length up to 12 hops in tandem.
2. Analog voice circuits used for the transmission of data (such as E2A and protection
switching signals) shall meet all electrical requirements for a 3002, C2 conditioned
voice frequency channel as specified by PUB 41004.[29]
3. An integrated digital orderwire shall meet all electrical requirements for a 3002, C2
conditioned voice frequency channel as specified by PUB 41004.[29]
12.2.2
Service Channel Provision
Provision of a single orderwire channel linking all stations is a requirement. It is a desirable
objective to provide for an additional VF circuit in the service channel that can be used for
a second orderwire channel linking only a few stations (express order circuit).
12–1
Microwave Digital Radio Systems Criteria
SERVICE CHANNEL
12.3
TR-TSY-000752
Issue 1, October 1989
Service Channel Protection
The service channel should be protected in such a way as to prevent its loss due to the
failure of just one specific radio channel.
EXAMPLE
The service channel information is simultaneously
carried over two different digital radio channels; if
either should fail, the service channel would remain
functional.
12–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SAFETY CONSIDERATIONS
13. SAFETY CONSIDERATIONS
This section includes requirements relating to high voltage, high temperature, and radiation
hazards. Sections 14 and 15 contain further material having a bearing on safety.
13.1
High Voltage
The radio equipment design shall minimize the exposure of personnel to hazardous
voltages by meeting the following requirements:
1. Voltages at or above 140 Vdc or 50 Vac rms shall be enclosed or guarded to prevent
contact. Warning labels shall be conspicuously displayed (with the guards in place or
removed).
2. The design shall allow craftspeople safe access to parts if metal tools are to be used
(e.g., insulating sleeves to guide screwdrivers to recessed potentiometers when nearby
parts have hazardous voltages present).
3. Arrangements shall be provided to discharge large capacitors (e.g., bleeder resistors).
4. All external metal parts shall be grounded (see Section 15).
13.2
High Temperature
High temperatures on exposed surfaces based on 25 o C ambient shall be treated as follows:
o
o
• For temperatures over 45 C, but less than 55 C, an appropriate warning label is
required.
o
• For temperatures over 55 C, a warning label and a protective cover or guard to prevent
accidental contact are required.
13.3
Radiation Hazards
Radiation from the equipment shall meet the requirements set by OSHA — Code of Federal
Regulations, Part 29, Section 1910.97.
13–1
Microwave Digital Radio Systems Criteria
SAFETY CONSIDERATIONS
13–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
14. POWER SUPPLY INTERFACES AND REQUIREMENTS
14.1
Introduction
This section defines the interface between BCC power plants, and the power conversion
and conditioning portions of the digital radio system. The noise and voltage variations of
standard BCC -48V and -24V power plants are specified. The radio equipment shall
perform satisfactorily in the presence of these impairments. Requirements are also given
for other aspects of the power equipment within the digital radio system (e.g., noise fed
back toward the battery plant, electromagnetic radiation from and into the power
components).
14.2
Bus Voltages
The radio equipment shall be powered from a negative battery bus — either -24V or -48V
nominal. Factory options shall be available for both voltages. Tables 1and 2 give normal
and emergency limits for the voltage ranges at equipment locations. The radio equipment
shall function normally; that is, it shall meet all requirements for system performance when
the bus voltage is within the normal range shown in Tables 1 and 2. For bus voltages outside
the normal range, but within the emergency limits, the system shall continue to function and
meet all requirements for system performance except that the percent EFSs requirement in
Section 3.2 is relaxed by a factor of 10. For operation under emergency voltage limits, a 1hop system may have a minimum of 99.6% EFS (0.1% per hop ES and 0.3% for the digital
terminals and processors). The transient voltage limits shown in Tables 1 and 2 are
maximum values that are reached during high voltage runaway of the charging equipment.
High-voltage shutdown is initiated at voltages below those limits. The duration of the
transient may be as long as 0.5 seconds, depending on the delay built into the controls.
Existing -48V CO power plants have typically been engineered to provide the following
voltages at the power distribution frame.
Table 1.
Voltage Requirements for -48V Distribution Subsystems
Normal
Emergency
Transient Limit
a.
24-Cell Battery
Only Planta
24-Cell CEMF
Plant
23-Cell Plant
With 4 End Cells
-55.0 to -50.8
-50.2 to -47.9
-50.3 to -48.3
-52.0 to -45.0
-52.0 to -44.0
-60
-60
-60.0 to -43.75
-62
b
Includes the voltage levels required for 24-cell sealed lead-acid batteries (see TR-TSY-000406[30]).
b. Voltage drop limits of distribution system may cause the voltage appearing at the using equipment to
be 1V less than the battery voltage.
14–1
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
TR-TSY-000752
Issue 1, October 1989
The above requirements are also applicable to -48V power plants located at the microwave
digital radio site. TR-TSY-000513[31] provides additional details.
TR-EOP-000154[32] provides requirements for -24V power plants located at the
microwave digital radio site. However, the transient voltage range has been modified, and
normal and emergency voltage requirements added, as Table 2 shows.
Table 2.
Voltage Requirements for -24V Distribution Subsystems
Nominal Battery
Voltage (V)
Transient
(V)
Normal
(V)
Emergency
(V)
-24
-32.0 to -21.84
-27.5 to -25.4
-30.0 to -21.84
In addition to the listed Maximum Transient Voltage, other transients of short-time
duration are often induced on battery leads by current transients in the power distribution
system. For example, 75V peak-to-peak (τ = 10-3 seconds) transients are observed on a
-48V distribution systems. The connected equipment shall not be damaged by such voltage
transients and shall recover after the transient is terminated. It is possible for the bus voltage
to fall below the limits shown in Tables 1 and 2. The connected equipment shall tolerate the
lower voltage without damage.
14.3
Bus Noise
Noise (ripple at audio or higher frequencies) may be present on the power bus. When the
noise is limited to the levels indicated in Table 3, the equipment shall operate and meet all
performance requirements of Section 3.
Table 3.Electrical Noisea
Voice
Frequencyb**
24V
48V
55 dBrnc
55 dBrnc
Radio
Frequencyc***
100 mV rms
100 mV rms
Ripple Noise
250 mV peak-to-peak or ±.5%
of plant float voltage
250 mV peak-to-peak or +.5%
of plant float voltage
a.
Refer to Section 7.1.4 of TR-EOP-000154.[22]
b. ** Measured with a C-Message Weighting Network.
c. *** rms voltage measured in any 3-kHz band between 10 kHz and 20 MHz.
14–2
TR-TSY-000752
Issue 1, October 1989
14.4
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
Noise Allocation
The radio equipment shall not load the bus in such a manner as to cause noise voltages in
excess of those specified in Table 4. The test method is shown in Figure 6.
Table 4.
Noise Allocation Among Converters
I C = Converter Input Current, I T = Battery Plant Capacity
X C, V C = Converter Input Noise
Voice Frequency Range (0.3 kHz to 10 kHz)a
Noise Per Converter
24 V & 48 V
X C = ( 49 + 10 log IC – 10 Log IT )dBrnc
X C = ( 9 + 10 log I C )dBrnc where I T = 10, 000 amps
Higher Frequency Range (10 kHz to 1 MHz)b
Noise Per Counter
24 V & 48 V
1⁄2
( IC )
V C = 100 ----------------- mV(rms)
1⁄2
IT
= ( IC )
1⁄2
mV (rms) when I T = 10, 000
a.
Measured with a C-Message Weighting Network at 600Ω.
b.
rms voltage as measured with 3-kHz bandwidth instrument at
50Ω.
14–3
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
TR-TSY-000752
Issue 1, October 1989
NMS
REGULATED
RECTIFIER
3µ H
12 µ H
GRD
30,000 µ F
LOW ESR & L
SPRAGUE
432 D OR
EQUIV
NO. 10 AWG
N = 4 TURNS
R = 2.3”
L = 60”
RL = 5.3 X 10-3 Ω
EQUIV. CABLE
INDUCTANCE
NO. 10 AWG
N = 10 TURNS
r = 2.3”
L = 145”
RL = 13.9 X 10-3Ω
Figure 6. Battery Noise Test Setup
NOTE
Measurement of noise induced in the bus may be
performed as indicated in Figure 6. Digital radio
equipment may be located in offices with battery
plants up to 10,000 amperes.
14–4
CONVERTER
TR-TSY-000752
Issue 1, October 1989
14.5
14.5.1
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
Radio Frequency Interference
Emitted Radiation Requirements
The power conversion subsystem of the radio equipment shall be designed to limit radiation
of electromagnetic interference to the extent that the radiation does not interfere with
commercial licensed station reception outside the system area and does not compromise
other subsystems within the telephone company premises. The requirement is shown in
Figure 7.
.
130
RADIATED EMISSION LIMITS AT 1 METER
FROM EQUIPMENT BEING MEASURED
110
(10 kHz BANDWITH)
FIELD INTENSITY dB ABOVE 1
µ
V/METER
120
100
90
RATED OUTPUT POWER
80
70
60
50
40
30
100W
400W
20
.01
0.1
1.0
10
100
10K
1K
FREQUENCY IN MHz
Figure 7. Radiated Emission Requirements
14–5
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
14.5.2
TR-TSY-000752
Issue 1, October 1989
Conducted Noise Currents
Noise currents induced in unshielded wiring connected to the bay for purposes of powering,
alarming, and metering, shall be limited as indicated in Figure 8..
130
120
CONDUCTED EMISSION LIMITS FOR LOW FREQUENCY INPUTS AND OUTPUTS
110
RATED POWER OUTPUT
CURRENT IN dB ABOVE 1µ A/10kHz
100
90
80
70
400W
100W
60
50
40
30
20
10
0.0001
0.001
0.01
0.1
FEQUENCY IN MHz
Figure 8. Conducted Emission Requirements
14–6
1.0
10
TR-TSY-000752
Issue 1, October 1989
14.5.3
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
Field Intensity
All power supplies shall tolerate an incident field intensity of 140 dB above 1υV/m
measured at a distance of 1m from the equipment and maintain an output variation of 1%
or less as shown in Figure 9.
RADIATED
SUSCEPTIBILITY FOR
VARIATION
RADIATED
SUSCEDPTIBILITY
FOR1%
1%OUTPUT
OUTPUT
VARIATION
150
ALL UNITS
20
10
140
130
1
120
.001
.01
0.1
1.0
10
100
1000
FREQUENCY IN MHz
Figure 9. Radiated Susceptibility Requirements
14–7
FIELD INTENSITY IN VOLTSMETER
FIELD INTENSITY IN dB ABOVE 1 µ V/METER
160
Microwave Digital Radio Systems Criteria
POWER SUPPLY INTERFACES AND REQUIREMENTS
14.6
TR-TSY-000752
Issue 1, October 1989
Electrolytic Capacitors (All Units)
It is required that the date of manufacture shall be clearly stamped on the capacitors and
shall be plainly visible. The EIA date code is acceptable.
1. It is required that electrolytic capacitors shall be rated to operate at 85o C or higher.
2. It is required that the peak voltage applied, which includes ac ripple plus dc, shall not
exceed 85% of the voltage rating of the capacitor.
3. It is recommended that electrolytic capacitors be equipped with a pressure-temperature
or pressure-type vent that is not blocked when installed in equipment.
14.7
Circuit Breakers
The -24V (or -48V) input side of all power supplies shall be fused, and load protection shall
be provided either by isolation diodes, internal power unit current limiting, load fuses, or
circuit breakers. It is recommended that circuit breakers be the trip-free type. The contacts
cannot be held closed during an overcurrent condition by holding the lever in the closed
position. Circuit breakers shall meet the applicable requirements (make and break cycles,
marking, etc.) of the Underwriters’ Laboratories Standards 489, as amended.
14–8
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
PHYSICAL DESIGN AND HUMAN FACTORS GENERIC REQUIREMENTS
15. PHYSICAL DESIGN AND HUMAN FACTORS GENERIC
REQUIREMENTS
15.1
Introduction
This section outlines the environment to which the radio equipment is expected to be
subjected in both service and shipment. Basic temperature, humidity, and mechanical shock
requirements are included. Many of these generic requirements are given in one or more
referenced publications. Additional generic requirements specific to digital radio are
included.
15.2
General Equipment Requirements
Generic requirements for new equipment to be located in BCC buildings are given in TREOP-000063[33] and TR-TSY-000499.[1] Digital radio equipment shall meet all such
applicable requirements specified in TR-EOP-000063[33] and TR-TSY-000499.[1] TREOP-000063[33] also includes ambient temperature and humidity limits within BCC
buildings. The digital radio equipment shall meet, without readjustment, all performance
requirements for temperature and humidity within both the operational and short-term
temperature and humidity limits given in TR-EOP-000063.[33]
Certain sections of the general equipment requirements do not apply to digital radio
equipment, such as portions devoted to distributing frame or cable entrance areas. One
modification is to be made to the requirements (see Section 15.3.2).
15.3
15.3.1
Additional Environment Factors
Altitude
The equipment shall meet all operational requirements at any altitude from sea level to
12,000 feet.
15.3.2
Acoustical Noise
The acoustical noise section of TR-EOP-000063, [33] provides sound level limits set to
ensure against hearing damage. For digital radio equipment, the indoor sound level
requirement is reduced to 65 dBA (objective 55 dBA) to permit maintenance personnel to
carry on normal conversations. The methods of measurement and all other portions of the
acoustical noise section apply without modification.
15–1
Microwave Digital Radio Systems Criteria
PHYSICAL DESIGN AND HUMAN FACTORS GENERIC REQUIREMENTS
15.3.3
TR-TSY-000752
Issue 1, October 1989
Thermal Shock
The equipment integrity shall not be compromised by thermal shock experienced during
shipment or storage. The test procedures are defined in Section 17.
15.4
Human Factors
TR-TSY-000824[34] provides the requirements and objectives for human factors including:
1. User characteristics
2. Visual and available interface
3. Manual controls
4. Labeling requirements
5. Numbering
6. Safety.
Applicable criteria shall be met.
15.5
Physical Design
TR-TSY-000078[35] provides the criteria for product physical design and includes the
following:
1. Materials and finishes
2. Connectors
3. Wire and cable
4. Printed wiring boards and assemblies
5. Equipment sub-assembly and assembly
6. Electrostatic discharge
7. Identification and marking
8. Packaging
9. Repair
10. Qualification text procedure and tests and methods.
Applicable criteria shall be met.
15–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
DOCUMENTATION
16. DOCUMENTATION
16.1
Required Documentation
Documentation is an integral part of telecommunications products. Appropriate and
complete documentation is essential to the use of these products. The manufacturer shall
provide documentation (shipped with the equipment) as specified in TR-TSY-000454.[36]
16.2
Standards
Information Publication (IP) 10260[37] provides manufacturers with the guidelines
necessary to prepare certain telecommunications product documentation using the Task
Oriented Practices (TOP) concept. TOP is used in preparing documentation related to the
installation, operation, and maintenance of telecommunications equipment. The systematic
development process described in TOP requires that the documentation enables employees
(entry level and experienced) to perform their tasks rapidly, accurately, and efficiently.
IP 10300[38] provides telecommunications equipment and system designers,
manufacturers, and consultants with the documentation guidelines necessary to enable
BCC personnel to engineer and install equipment furnished by outside manufacturers. The
guidelines described in this document are generic in nature and are applicable to all types
of telecommunication equipment.
16–1
Microwave Digital Radio Systems Criteria
DOCUMENTATION
16–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
17. THERMAL SHOCK TEST METHODS
17.1
General
This section presents test methods that demonstrate the capacity of the radio equipment to
withstand temperature and humidity environments that may be encountered during
shipping and storage.
Tests 12A and 12B subject equipment to a thermal shock environment. Tests 12C and 12D
subject equipment to temperature cycling while maintaining certain humidity conditions.
These are all nonoperational tests; however, appropriate electrical checks should be made
on equipment before and after each test. It is intended that these tests be imposed on
equipment in the packed-for-shipment state. If this is not possible, these tests may be
conducted on equipment in the unpacked state.
17–1
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
17.2
17.2.1
TR-TSY-000752
Issue 1, October 1989
Tests
Test 12A: High-Temperature Thermal Shock
The test should be performed as follows:
1. Mount thermocouples at appropriate points in the equipment to determine when
equipment temperatures are stabilized. (This item is particularly important on relatively
large apparatus.)
2. Perform initial electrical measurements before testing. (This equipment should not be
operated during test.)
3. Continuously monitor chamber ambient temperature and Relative Humidity (RH)
during the test.
4. Refer to Figure 10. Increase the chamber ambient temperature at the rate of
approximately 30 0 F/hr to 150 o F with an RH of approximately 10%.
5. Maintain the above conditions until the rate of change of equipment temperature is less
than 2o F/hr.
6. Administer the thermal shock by decreasing the chamber temperature from 150 o F to
room temperature (70 o F) in 5 minutes or less.
7. Maintain 70 o F until equipment temperatures have stabilized.
8. Repeat pretest electrical measurements.
STABILIZE
150 0 F
10%RH
~30 0F/HR
DROP ≤5 MIN
STABILIZE
70 0F
TIME
Figure 10. High-Temperature Thermal Shock Tests
17–2
TR-TSY-000752
Issue 1, October 1989
17.2.2
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
Test 12B: Low-Temperature Thermal Shock
The test should be performed as follows:
1. Repeat items (1) through (3) of Test 12A (see Section 17.2.1).
2. Refer to Figure 11. Decrease the chamber ambient temperature at a rate of
approximately 30o F/hr to -40° F while maintaining an RH as low as possible.
3. Maintain the above condition until the rate of change of equipment temperature is less
than 2o F/hr.
4. Administer the thermal shock by increasing the chamber temperature from -40° F to
room temperature (70o F) in 5 minutes or less.
5. Maintain 70 o F until equipment temperatures have stabilized.
6. Repeat pretest electrical measurements.
0
TIME
STABILIZE
70 F
RISE ≤ 5 MIN
0
~30 F/HR
-40 0 F
STABILIZE
Figure 11. Low-Temperature Thermal Shock Tests
17–3
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
17.2.3
TR-TSY-000752
Issue 1, October 1989
Test 12C: Cyclic Temperature, High Relative Humidity
The test should be performed as follows:
1. Repeat items (1) through (3) of Test 12A (see Section 17.2.1).
2. Refer to Figure 12. Starting from room temperature (70 ° F), raise the temperature at a
rate of approximately 25 ° F/hr to 82 o F while maintaining an RH of approximately
95%.
3. Maintain the above conditions until the rate of change of equipment temperature is less
than 2 o F/hr.
4. Decrease the chamber ambient temperature at a rate of approximately 7 ° F/hr to
30 o F while maintaining an RH of approximately 95%.
5. Maintain the above conditions until the rate of change of equipment temperature is less
than 2 o F/hr.
6. Increase chamber ambient temperature at a rate of approximately 25 oF/hr to 70 ° F
while maintaining an RH of approximately 95%.
7. This test cycle should be repeated three times.
8. Repeat pretest electrical measurements. If moisture has collected on equipment
surfaces, the electrical measurements should be made after allowing time for the
moisture to evaporate.
NOTE: MAINTAIN A CONSTANT
95% RH OVER THE ENTIRE
TEMPERATURE-TIME CYCLE
82 0F
STABILIZE
~7 0F/HR
70 F
0
30 0F
~25 0 F/HR
0
~25 F/HR
STABILIZE
TIME
Figure 12. High Humidity - Cyclic Temperature Test (Perform Three Cycles)
17–4
TR-TSY-000752
Issue 1, October 1989
17.2.4
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
Test 12D: Cyclic Temperature, Low Relative Humidity
The test should be performed as follows:
1. Repeat items (1) through (3) of Test 12A (see Section 17.2.1).
2. Refer to Figure 13. Starting from room temperature (70 o F), raise the temperature at a
rate of approximately 25 ° F/hr. to 150 o F while maintaining an RH of approximately
10%.
3. Maintain 150 ° F at 10% RH until the rate of change of equipment temperature is less
than 2 ° F/hr.
4. Decrease chamber ambient temperature at a rate of approximately 7 ° F/hr to a
temperature of -40 ° F while maintaining an RH of approximately 10% (facility
permitting).
5. Maintain -40 ° F until the rate of change of equipment temperature is less than 2 ° F/hr.
6. Increase chamber ambient temperature at a rate of approximately 25 ° F/hr. to 70° F
while maintaining an RH/of approximately 10%.
7. This test cycle should be repeated three times.
8. Repeat pretest electrical measurements.
NOTE: MAINTAIN A CONSTANT
10% RH OVER THE ENTIRE
TEMPERATURE-TIME CYCLE
~25 0 F/HR
0
150 F
~7 0F/HR
70 0F
STABILIZE
~25 0 F/HR
0
-40 F
STABILIZE
TIME
Figure 13. Low Humidity - Cyclic Temperature Test (Perform Three Cycles)
17–5
Microwave Digital Radio Systems Criteria
THERMAL SHOCK TEST METHODS
17–6
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
4-GHz DIGITAL RADIO REQUIREMENTS
18. 4-GHz DIGITAL RADIO REQUIREMENTS
18.1
Spectrum Considerations
18.1.1
Adjacent Channel Generic Requirements
Spectral spillover into nearby channels and, conversely, vulnerability to spillover from
nearby channels, must be carefully considered in the design of digital radio equipment. A
digital radio system shall be capable of meeting the constraints described below.
1. A digital radio system shall permit the same hop operation of the cross-polarized
adjacent channels (center frequency separation of 20 MHz) of an identical digital radio
system. Specific requirements are given in Section 18.3.
2. A digital radio system shall permit the same hop operation of an analog FM radio
system (any vendor’s) operating on an alternate channel with similar polarization. The
interfering energy in any 4-kHz band of the analog FM system shall not exceed (4 or
14) dBrnc0. If the analog system is long-haul, the requirement is 4 dBrnc0; if the analog
system is short-haul, the requirement is 14 dBrnc0. The interfering energy in any noise
slot (used for protection switching) shall not change the switching point by more than
1 dB.
Caution - the interfering energy includes the following two components:
A. The direct spillover from the digital signal into the analog channel
B. The additional convolution energy that occurs via the FM detection process and is
specific to the analog vendor’s product.
3. It is desirable for a digital radio system to permit the same hop operation of an analog
FM radio system (any vendor’s) operating on an adjacent cross-polarized channel. The
requirements above for the noise in a 4-kHz band and regarding the switching point
apply here as well.
18.1.2
Frequency Plans
The standard 4-GHz frequency plan, shown in Figure 14, must be adhered to.
18.2
RF Interface
Mechanically, the digital radio transmitter and receiver shall interface on the RF side with
indoor wave guide WR-229.
18–1
Microwave Digital Radio Systems Criteria
4-GHz DIGITAL RADIO REQUIREMENTS
TR-TSY-000752
Issue 1, October 1989
Electrically, the digital radio transmitter and receiver shall interface on the same antenna
run with other digital or analog radio equipment. Section 18.1.1 gives the requirements on
the transmitted spectrum.
18.3
Outage Considerations
Protection against adjacent channel interferences requires control of the transmitted
spectrum, sufficient filtering within the desired receiver, polarization isolation achieved by
using orthogonal polarizations for the adjacent channel pair, and antenna side-to-side
coupling loss. The user is responsible for controlling the polarization isolation and antenna
side-to-side coupling loss.
18–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
4-GHz DIGITAL RADIO REQUIREMENTS
The manufacturer is responsible for sufficient transmitter and receiver filter ring. Thus, in
the presence of a same-type modulation adjacent channel interferer with a CIR of -7 dB at
the waveguide input to the receiver bay, the DS3 BER shall not exceed 10-3.
Frequency Allocation Plans
Polarization
H
V
V
H
4198
4190
6
6
12
4150
12
6
6
12
5
11
5
11
4
10
4
10
9
9
3
3930
3
3890
3910
9
3
3870
9
2
2
8
2
8
1
7
1
7
3770
3750
7
1
3810
3790
8
1
3850
3830
8
2
3970
3950
10
3
4010
3990
10
4
4050
4030
11
4
4090
4070
11
5
4130
4110
12
5
4170
7
3730
3710
Frequency in MHz
Note:
Indicates auxiliary channel assignment.
Figure 14. 4-GHz Frequency Plan
18–3
Microwave Digital Radio Systems Criteria
4-GHz DIGITAL RADIO REQUIREMENTS
18–4
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
6-GHz DIGITAL RADIO REQUIREMENTS
19. 6-GHz DIGITAL RADIO REQUIREMENTS
19.1
19.1.1
Spectrum Considerations
Adjacent Channel Generic Requirements
Spectral spillover into nearby channels and, conversely, vulnerability to spillover from
nearby channels, must be carefully considered in the design of digital radio equipment.
Three system constraints are described below. A digital radio system must be capable of
meeting the first two constraints; the third constraint is a desirable objective.
1. A digital radio system must permit the same hop operation of cross-polarized adjacent
channels (center frequency separation of 29.65 MHz) of an identical digital radio
system. Specific requirements are given in Section 19.3
2. The transmitted spectrum of the digital radio must permit the same hop of operation of
an 1800-channel analog FM radio channel with a center frequency separation of 59.3
MHz and similar polarization. The digital radio spectral requirement that must be met
for a transmitter with a nominal output power of P dBm is described in the next
paragraph.
The power density in a 4-kHz band at a frequency of (50.776-S) MHz from the center
of the digital radio channel shall be at least (75+P) dB below the measured transmitter
power in dBm. S is the sum of the maximum frequency tolerances (in MHz) of the two
transmitters. This requirement limits the adjacent channel interference noise into the
highest frequency baseband circuit of the analog radio to 4 dBrnc0 or less. That circuit
is nominally located 50.776 MHz from the center of the digital channel.
3. It is desirable that the digital radio permit operation of an analog FM radio with a center
frequency separation of 44.5 MHz (split frequency plan) or 29.65 MHz. In this case,
the frequency cited in 2. above would be decreased by 14.8 MHz or 29.65 MHz,
respectively. The attenuation limit would be unchanged. For adjacent channel
separation, a nominal 30 dB of cross-polarization isolation may be assumed.
19.1.2
Frequency Plans
The standard 6-GHz frequency plan, as shown in Figure 15, must be followed. The
frequencies in Figure 15 are only approximate; that is, they are rounded to one decimal
place. Other frequency plans have been used in this band and may be made available as
options.
19–1
Microwave Digital Radio Systems Criteria
6-GHz DIGITAL RADIO REQUIREMENTS
19.2
TR-TSY-000752
Issue 1, October 1989
RF Interface
Mechanically, the digital radio transmitter and receiver must interface on the RF side with
indoor waveguide WR-159. Electrically, the digital radio transmitter and receiver must
interface on the same antenna run with other digital or analog radio equipment. Section
19.1.1 gives the requirements for the transmitted spectrum.
19.3
Outage Considerations
The relevant source of adjacent channel interference is the transmitters on the same hop as
the desired transmitter that have a nominal frequency difference equal to one channel
spacing (29.65 MHz). Protection against this source of interference requires control of the
transmitted spectrum, sufficient filtering within the desired receiver, and polarization
isolation achieved by orthogonal polarization of the adjacent channel’s RF signal with
respect to the desired channel. Polarization isolation is the responsibility of the user.
Sufficient filtering is the responsibility of the manufacturer. Thus, in the presence of a same
19–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
6-GHz DIGITAL RADIO REQUIREMENTS
type modulation adjacent channel interferer with a CIR of 10 dB at the waveguide input to
the receiver bay, the DS3 BER shall not exceed 10-3.
POLARIZATION
H
V
H
V
V
H
OR
V
64/04.8
6375.2
6345.5
28
27
26
25
25
24
24
6256.5
6226.9
27
26
6315.9
6286.2
H
28
23
22
22
6197.2
21
21
6152.8
18
18
6123.1
17
6093.5
6063.8
17
16
16
15
6034.2
15
14
14
6004.5
13
5974.8
5945.2
12
11
12
11
Frequency in MHz
Figure 15. 6-GHz Frequency Plan
19–3
Microwave Digital Radio Systems Criteria
6-GHz DIGITAL RADIO REQUIREMENTS
19–4
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
11-GHz DIGITAL RADIO GENERIC REQUIREMENTS
20. 11-GHz DIGITAL RADIO GENERIC REQUIREMENTS
20.1
20.1.1
Spectrum Considerations
Adjacent Channel Generic Requirements
Spectral spillover into nearby channels and, conversely, vulnerability to spillover from
nearby channels, must be carefully considered in the design of digital radio equipment.
Three system constraints are described below. A digital radio system must be capable of
meeting the first two constraints; the third constraint is a desirable objective.
1. A digital radio system must permit the same hop operation of the cross-polarized
adjacent channels (center frequency separation of 40 MHz) of an identical digital radio
system. Specific requirements are given in Section 20.3.
2. The transmitted spectrum of the digital radio must permit the same hop operation of a
2400-channel analog FM radio channel with a center frequency separation of 80 MHz
and similar polarization. The digital radio spectral requirement that must be met for a
transmitter with a nominal output power of P dBm is described in the next paragraph.
The power density in a 4-kHz band at a frequency of (68.596-S) MHz from the center
of the digital radio channel shall be at least (75+P) dB below the measured transmitter
power in dBm. S is the sum of the maximum frequency tolerances (in MHz) of the two
transmitters. This requirement limits the adjacent channel interference noise into the
highest frequency baseband circuit of the analog radio to 4 dBrnc0 or less. That circuit
is nominally located (68.596-S) MHz from the center of the digital channel.
3. It is desirable that the digital radio permit operation of an analog FM radio with a center
frequency separation of 60 MHz (alternate frequency plan) or 40 MHz. In this case, the
frequency cited in 2. above would be decreased by 20 MHz or 40 MHz, respectively.
The attenuation limit would be unchanged. For adjacent channel separation, a nominal
25 dB of cross-polarization isolation may be assumed.
20.1.2
Frequency Plans
The 11-GHz frequency plan, shown in Figure 16, must be followed. Figure 16 gives the
frequencies and the corresponding TL and CCIR channel numbers. The channels
designated P and J make up "regular" plan and those designated D and E are in the
"alternate" plan.
20–1
Microwave Digital Radio Systems Criteria
11-GHz DIGITAL RADIO GENERIC REQUIREMENTS
20.2
TR-TSY-000752
Issue 1, October 1989
RF Interface
Mechanically, the digital radio transmitter and receiver must interface on the RF side with
indoor waveguide WR-90.
Electrically, the digital radio transmitter and receiver must interface on the same antenna
run with other digital or analog radio equipment. Section 20.1.1 gives the requirements on
the transmitted spectrum.
20.3
Outage Considerations
The relevant source of adjacent channel interference is the transmitters on the same hop as
the desired transmitter that have a nominal frequency difference equal to one channel
spacing (40 MHz). Protection against this source of interference requires control of the
transmitted spectrum, sufficient filtering within the desired receiver, and polarization
isolation achieved by orthogonal polarization of the adjacent channel, RF signal with
respect to the desired channel. Polarization isolation is the responsibility of the user.
Sufficient filtering is the responsibility of the manufacturer. Thus, in the presence of a
same-type modulation adjacent channel interferer with a CIR of 0 dB at the waveguide
input to the receiver bay, the DS3 BER shall not exceed 10-3.
20–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
11-GHz DIGITAL RADIO GENERIC REQUIREMENTS
.
FREQUENCY
MHz
ALT
REG
11,685*
11,045
11,605
11,565
11,525
11,485
11,445
TL CHANNEL
DESIGNATOR
ALT
REG
11,665
11,625
11,585
11,545
11,505
11,465
11,325
11,285
11,245
11,345
11,305
11,265
11,225
11,115
11,135
11,095
10,955
10,915
10,875
10,835
10,795
10,755
10
11,015
10,975
10,935
10,895
10,855
10,815
10,775
10,735
10,715*
10*
6D
7J
9
9*
7D
10J
8
10D
11J
8*
7
7*
11D
6*
4D
6*
5*
1J
5*
1D
4*
8J
4*
8D
3*
5J
3*
5D
2*
12J
2*
12D
1*
9J
1*
9D
**
5E
12
5P
12
8E
11
8P
9E
10,055
10,995
11*
3D
6J
11
10
9P
11,075
11,035
11
3J
11,175
11,155
12*
2D
11,425
11,385
11,365
12*
2J*
4J
11,405
CCIR CHANNEL
DESIGNATOR
REG
ALT
12E
12P
3E
3P
10
9
9
8
8
2E
2P
7
7
7E
7P
6
6E
6
5
6P
11E
11P
5
4
10E
10P
4
3
3
1E
2
1P
2
4E
4P*
1*
* These channels may not have an emission designator greater than 30,000F.
** Not defined by CCIR.
Figure 16. 11-GHz Frequency Plan
20–3
Microwave Digital Radio Systems Criteria
11-GHz DIGITAL RADIO GENERIC REQUIREMENTS
20–4
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
ACRONYMS
21. ACRONYMS
AGC
Automatic Gain Control
AIS
Alarm Indication Signal
B3ZS
Bipolar 3 Zero Substitution
BCC
Bellcore Client Company
BER
Bit Error Ratio
CIR
Carrier-To-Interference Ratio
COFA
Change Of Frame Alignment
CRC
Cyclic Redundancy Check
DS3
Digital Signal level 3 (44.736 Mb/s)
EFS
Error-Free Second
EIA
Electrical Industries Association
ES
Errored Second
FCC
Federal Communications Commission
GPOW
General Purpose Orderwire
IBPD
Inband Power Difference
IF
Intermediate Frequency
LCV
Line Code Violation
LOF
Loss Of Frame
MTBF
Mean Time Between Failures
QAM
Quadrature Amplitude Modulation
OOF
Out Of Frame
PSK
Phase-Shift Keying
RF
Radio Frequency
RH
Relative Humidity
SEF
Severely Errored Framing
SES
Severely Errored Second
SNR
Signal-to-Noise Ratio
TLP
Transmission Level Point
TOP
Task Oriented Procedures
WSR
Weather Surveillance Radar
21–1
Microwave Digital Radio Systems Criteria
ACRONYMS
21–2
TR-TSY-000752
Issue 1, October 1989
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
REFERENCES
22. REFERENCES
1. TR-TSY-000499,Transport Systems Generic Requirements (TSGR): Common
Requirements, Bellcore, Issue 2, December 1988 (a module of TSGR, TR-TSY000440).
2. TR-TSY-000191, Alarm Indication Signal Requirements and Objectives, Bellcore,
Issue 1, May 1986.
3. W. T. Barnett, "Multipath Propagation at 4, 6 and 11 GHz," Bell System Technical
Journal, Vol. 51, No. 2, pp. 321 - 361, 1972.
4. S. H. Lin, "Statistical Behavior of a Fading Signal," Bell System Technical Journal,
Vol. 50, No. 10, Dec. 1971, pp. 3211 -3270.
5. W. D. Rummler, "More on the Multipath Fading Channel Model," IEEE
Transactions on Communications, Vol. COM-29, No. 3, March 1981, pp. 346-352.
6. C. W. Lundgren and W. D. Rummier, "Digital Radio Outage Due to Selective
Fading - Observation vs Prediction from Laboratory Simulation," Bell System
Technical Journal, Vol. 58, No. 5, May-June 1979, pp. 1073 - 1100.
7. T. C. Lee and S H. Lin, "A Model of Frequency Diversity Improvement for Digital
Radio", 1985 International Symposium on Antennas and Propagation, Kyoto,
Japan, August 20 - 22, 1985, Proceedings of the Symposium, pp. 509 - 512. (The
Institute of Electronics and Communication Engineers of Japan, Kikan-ShinkoKaikan, 5 - 8 Shibakoen 3 Chome, Minato-Ku, Tokyo, 105 Japan.)
8. T. C. Lee and S. H. Lin, "More on Frequency Diversity for Digital Radio", 1985
IEEE Global Telecommunications Conference, New Orleans, Dec. 2 - 5, 1985,
Conference Record, Vol. 3, pp. 36.7.1 - 36.7.5.
9. M. Emshwiller, "Characterization of the Performance of PSK Digital Radio
Transmission in the Presence of Multipath Fading," 1978 International Conference
on Communications, Toronto, Conference Record, pp. 47.3.1 - 47.3.6.
10. A. Ranade and P. E. Greenfield, "An Improved Method of Digital Radio
Characterization from Field Measurements," IEEE 1983 International Conference
on Communications Conference Record, Vol. 2, pp. C 26.1 - 5.
11. K. T. Wu and T. Achariyapaopan, "Effects of Waveguide Echoes on Digital Radio
Performance,’’ 1985 IEEE Global Telecommunications Conference, Dec. 2 - 5,
1985, New Orleans, Conference Record pp 47.5.1.
12. A. Ranade, "Statistics of the Time Dynamics of Dispersive Multipath Fading and
Its Effects on Digital Microwave Radios," 1985 International Conference on
Communications, Chicago, pp. 1537-1540.
22–1
Microwave Digital Radio Systems Criteria
REFERENCES
TR-TSY-000752
Issue 1, October 1989
13. P. E. Greenfield, "Digital Radio Performance on a Long, Highly Dispersive Fading
Path," IEEE 1984 International Conference on Communications, Amsterdam,
Netherlands, May 14-17, 1984, Conference Proceedings pp. 1451 = 1154.
14. E. W. Allen and J. A. Crossett, "Digital Radio Propagation Experiments at 6 GHz,
Part II," IEEE 1984 International Conference on Communications, Amsterdam,
Netherlands, May 14-17, 1984, Conference Proceedings, p. 1455 - 1459.
15. TA-422-23231-84-01, Preliminary Requirements for and Description of
Gochannel Dual Polarization Digital Radio, Bellcore, Issue 1, March 1984.
16. TR-TSY-000332, Reliability Prediction Procedure for Electronic Equipment,
Bellcore, Issue 2, July 1988.
17. J. A. Schiavone, “Microwave Radio Meteorology: Fading By Beam Focusing,”
1982 International Conference On Communications, Conference Record, pp.
7B.1.1 - 1B.1.5.
18. E. T. Stephansen and G. E. Morgensen, "Experimental Investigation of Some
Effects of Multipath Propagation on a Line-of-Sight Path at 14 GHz," IEEE
Transactions on Communications, Vol. COM-27, No. 3, March 1979, pp. 643 647.
19. H. Giloi, "A Study of Field Strength Height Profiles Caused by Multipath Fading,"
IEEE Trans. Antenna and Propagation, Vol. AP-33, No. 12, pp. 1378-1385,
December 1985.
20. P. L. Dirner and S. H. Lin, "Measured Frequency Diversity Improvement For
Digital Radio," IEEE Transactions Communications, Vol. COM-33, No. 1,
January 1985, pp. 106 - 109.
21. R. Macchi, L. Moreno and P. Vicini, "Field Evaluation of a 70 Mb/s 7/11 GHz
Digital Radio Link," Alta Frequenza, Vol. LII, N. 5, Nov. - Dec. 1983, pp. 460487.
22. M. F. Gardina and A. Vigants, "Measured Multipath Dispersion of Amplitude and
Delay at 6 GHz in a 30-MHz Bandwidth," 1984 IEEE International Conference on
Communications, Amsterdam, Netherlands, May 14-17, 1984.
23. W. C. Jakes, Jr., "An Approximate Method to Estimate an Upper Bound on the
Effect of Multipath Delay Distortion on Digital Transmission," IEEE Transactions
on Communications, Vol. COM-27, No. 1, Jan. 1979, pp. 76-81.
24. Bell System PUB 49001, Requirements for Compatibility of Telecommunications
Equipment with Bell System Surveillance and Control Systems, July 1982
(available from Bellcore).
25. TR-TSY-000474, Operations Technology Generic Requirements (OTGR):
Network Maintenance: Network Element, Bellcore, Issue 2, February 1988
(Section 4 of OTGR, TR-TSY-000439).
22–2
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
REFERENCES
26. TR-TSY-000475, Operations Technology Generic Requirements (OTGR):
Network Maintenance: Transport Surveillance, Bellcore, Issue 2, February 1988,
plus Revision 1, November 1988 (Section 5 of OTGR, TR-TSY-000439).
27. TR-TSY-000481, Operations Technology Generic Requirements (OTGR):
Generic Operations Interfaces-Directory, Bellcore, Issue 2, February 1988, plus
Revision 1, November 1988 (Section 11 of OTGR, TR-TSY-000439).
28. TR-TSY-000833, Operations Technology Generic Requirements (OTGR):
Operations Application Messages - Network Maintenance: Network Element and
Transport Surveillance Messages, Bellcore, Issue 3, March 1989 (Section 12.3 of
OTGR, TR-TSY-000439).
29. Bell System PUB 41004, Data Communications Using Voice-Band Private Line
Channels, October 1973 (available from Bellcore).
30. TR-TSY-000406, DC Bulk Power System For Confined Locations, Bellcore, Issue
1, May 1988.
31. TR-TSY-000513, LATA Switching Systems Generic Requirements (LSSGR):
Power, Bellcore, Issue 2, July 1987, plus Revision 1, December 1988 (a module of
LSSGR, TR-TSY-000064).
32. TR-EOP-000154, Generic Requirements for 24, 48, 130, and 140 Volt Central
Office Power Plant Control and Distribution Equipment, Bellcore, Issue 1, May
1985.
33. TR-EOP-000063, Network Equipment-Building System (NEBS) - Generic
Equipment Requirements, Bellcore, Issue 3, March 1988.
34. TR-TSY-000824, Operations Technology Generic Requirements (OTGR): User
System Access, Bellcore, Issue 2, February 1988 (Section 10.1 of OTGR, TR-TSY000439).
35. TR-TSY-000078, Generic Physical Design Requirements for Telecommunication
Products and Equipment, Bellcore, Issue 2, December 1988.
36. TR-TSY-000454, Supplier Documentation for Network Elements, Bellcore,
Issue 1, July 1988.
37. Bell System IP 10260, Standards for Task Oriented Practices (TOP), 1977
(available from Bellcore).
38. Bell System IP 10300, Engineering and Installation Documentation Guide, March
1978 (available from Bellcore).
NOTE
All Bellcore documents are subject to change and their citation in this document reflects the
most current information available at the time of this printing. Readers are advised to check
current status and availability of all documents.
22–3
Microwave Digital Radio Systems Criteria
REFERENCES
TR-TSY-000752
Issue 1, October 1989
Technical Advisories (TAs) are documents that describe Bellcore’s preliminary view of
proposed generic requirements. To obtain TAs, write to:
Bellcore
Document Registrar
445 South Street, Room 2J125
P.O. Box 1910
Morristown, NJ 07960-1910
To obtain other Bellcore documents, contact:
Bellcore
Customer Service
60 New England Avenue, Room 1B252
Piscataway, NJ 08854-4196
1 (800) 521-CORE
(201) 699-5800 (for foreign calls)
BCC personnel should contact their company document coordinator and Bellcore
employees should call (201) 699-5802 to obtain documents.
22–4
TR-TSY-000752
Issue 1, October 1989
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
Appendix A: SUMMARY OF REQUIREMENTS AND
OBJECTIVES
Digital radio equipment provided under this specification must meet (without
readjustment) all performance requirements over the full ranges of normal operating
conditions described in Sections 2, 14, and 15. Appendix A tabulates these performance
requirements. Appendix A lists the performance requirements that need a statement of
compliance in general and specific supporting data with a description of the test
arrangements for the set(s) of test conditions specified for each item. The basic system to
be tested is a one-way, one-hop arrangement, including terminals that have DS3 input and
output.
This appendix summarizes the range of operating conditions and a set of midrange" or
"normal" values to be used in specific tests. The "normal" values are referred to as test
condition N. Test conditions LT/’HT are defined as an ambient temperature of 35° F/120°
F, a relative humidity within the operating range, and a nominal battery voltage. Test
condition AC refers to the presence of a similarly digitally modulated signal at the receiver
input with a frequency separation as shown below:
11 GHz — frequency separation of 40 MHz 25 dB of cross-polarization isolation
6 GHz — frequency separation of 29.65 MHz 30 dB of cross-polarization isolation
4 GHz — frequency separation of 20 MHz 30 dB of cross-polarization isolation.
Test condition BN refers to the presence of maximum noise on the power bus (Section
14.3). It is presumed that the test techniques employed by the manufacturer will conform
to standard accepted practice.
Section
Requirement
Objective
a
2.1
FCC REQUIREMENTS (Note 1)
Transmitter type approval (Part 21)
Receiver certification (Part 15)
Secondary RF radiation (Part 15.7)
3.1
final
para.
DS3 INTERFACE AT BASEBAND (Note 1)
The DS3 interface shall have the
format specified in TR-TSY-000499.
The DS3 signal output to the cross-connect
shall always have the correct parity.
3.2
ERRORED SECOND OPERATION
One-way, one-hop system shall operate
with less than 0.04% ES (0.015% per
terminal and 0.01% per radio equipment)
measured over 5 days. State whether special feature
is required to meet background error criteria Test
condition - (a) N+BN+AC, (b) LT, (c) HT
DS3 parity violation treated as
a path parameter with an
option to treat it as a line
parameter
A–1
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
TR-TSY-000752
Issue 1, October 1989
Section
Objective
Requirement
3.3
EQUIPMENT CAUSED ERROR
BURSTS
< 2 burst errored seconds for 5-day
test for one-way, one-hop system Test
condition- (a) N+BN+AC, (b) LT, (c) HT.
3.4
3rd &
4th
para.
RESTORATION or VALID DS3
OUTPUT SIGNAL
Restoration shall take place within
ms after removal of a short transient system
disturbance that interrupts radio system
framing without loss of the basic line signals.
[Five-second recovery from "no signal" state
for up to seven tandem hops after restoral of
valid signal.] Test Condition - N
4
DISPERSIVE FADE MARGIN
Dispersive Fade Margin ≥ 35 dB
Dispersive Fade Margin = ______ dB
Test Condition- (a) N, (b) LT, (c) HT.
> 45 dB
4.2
CHANNEL OUTAGE
DS1-to-DS1 channel outage is no more
than 105 minutes per year or 0.02% for
a 250-mile system.
4.7
HYSTERESIS
Mean Resync & Reframe time ≤ 0.25 sec.
No more than 5% > 0.5 sec.
Maximum time < 2 sec.
< 0.1 second
4.8
HYSTERESIS
Hysteresis in W-Curves
Provide 2 or 4 W-Curves
(with and without optional equalizer)
Provide1 or 2 dispersive fade margins
(with and without optional equalizer)
No hysteresis at
10-3 BER
4.9
SPACE DIVERSITY COMBINER
Describe Algorithm BER of combiner
output ≤ 10-5 for down fade range
BER of combiner output not worse
than better of two inputs by a factor of 2
for middle power range
BER of combiner output ≤ 10-3 for strong upfade
range Max Delay Accommodation ≥ 100 ns
A–2
Option for baseband
hitless Switch
TR-TSY-000752
Issue 1, October 1989
Section
4.10
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
Requirement
TEST JACKS
Provide test jacks for:
IF AGC voltage
RF AGC voltage (if applicable)
Linear amplitude dispersion
5
JITTER REQUIREMENTS (Note 1)
See Section 5, Digital Stream
Timing and Jitter
Test Condition- (a) N+BN, (b) LT, (c) HT,
6.4 &
6.5
MEAN TIME BETWEEN FAILURES
MTBF shall be ≥ 1 year
Test Condition - Not required;
data to be calculated
6.4.1
CO-CHANNEL INTERFERENCE
At BER = 10-3, theoretical SlXIR = X = ______
At BER = 10-6, theoretical SNR = ______
At CIR = X + 3,BER ≤ 10-3
At CIR = X + 6,BER ≤ 10-6
At I0-3 BER, CIR = ______ dB
At 10-6 BER, CIR = ______ dB
Test Condition- (a) N+BN, (b) LT, (c) HT
6.4.2
RF FILTER AND RADAR
INTERFERENCE
Option of RF blocking filter preceding
RF low noise preamplifier
6.4.3
ADJACENT CHANNEL
INTERFERENCE
7
SYSTEM GAIN AND RADIO
RECEIVER DYNAMIC RANGE
There shall be a 100 dB minimum system
gain for a 10-3 DS3 BER
Test Condition- (a) N+BN, (b) LT, (c) HT.
Dynamic Range ≥ 55 dB for 4- and 6-GHz
systems
Rmax = _____ dBm
Rmin = _____ dBm
Dynamic Range ≥ 55 dB for 11-GHz systems
Rmax = _____ dBm
Rmin = _____ dBm
Objective
Inband Power Difference
Per channel RF low noise
preamplifier between channel
separating network and
down-converter
Nyquist pulse shaping filters
can be retrofitted for
co-channel dual-polarization
operation
≥ 105 dB
≥ 60 dB
≥ 70 dB
A–3
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
TR-TSY-000752
Issue 1, October 1989
Section
Objective
Requirement
8.4
HITLESS SWITCHING
Switching causes < 10 errors
Mean switch completion time ≤ 50 ms
Max Delay accommodation ≥ 100 ns
Pulse amplitude change < 2 dB
Test Condition - N.
8.7.2
FREQUENCY-DIVERSITY
PROTECTION SWITCH
EXERCISING (Note 1)
The frequency diversity protection switch
shall have an exerciser that will automatically
exercise all switching circuits up to, but not
including, the final transfer switch at a
minimum of daily intervals
8.8
PROTECTION SWITCH
INITIATION (Note 1)
BER threshold must be within the range
10-3 to 10-7 true line error rate
SYNOPSIS OF NORMAL
OPERATING CONDITIONS
14.2
BUS VOLTAGES
Nominal voltage:
(-48 Vdc) - Refer to Table 1
(-24 Vdc) - Refer to Table 2
Test Condition - N except bus
voltage at emergency voltage
limits (see Tables 1 and 2)
15.2
GENERAL EQUIPMENT
REQUIREMENTS
Temperature (° F)
Normal Test Value: 65 to 75
Range: 35 to 120
Relative Humidity (%)
Normal Test Value: 40 to 60
Range: 20 to 80
15.3
A–4
ADDITIONAL ENVIRONMENTAL
FACTORS
Altitude (Ft)
Normal Test Value: 0 to 1500
Range: 0 to 12,000
Switching causes no errors
TR-TSY-000752
Issue 1, October 1989
Section
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
Requirement
18.11, 19.1.1, TRANSMITTED SPECTRUM (Note 1)
20.1.1
(Note 1)
Shall permit same hop operation of
cross-polarized adjacent channels
of an identical digital radio system.
Shall permit same hop operation of
an analog FM radio system operating
on an alternate channel with like
polarization.
Objective
Desirable to have same hop
operation of an analog FM
radio system operating on an
adjacent cross-polarized
channel
a. Note 1: Only a compliance statement is required for this requirement.
A–5
Microwave Digital Radio Systems Criteria
SUMMARY OF REQUIREMENTS AND OBJECTIVES
A–6
TR-TSY-000752
Issue 1, October 1989