13 dq Theory
advertisement

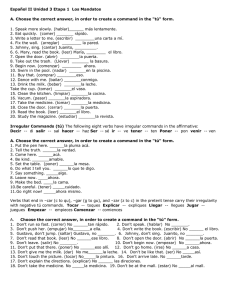
dq Theory for Synchronous Machine with Damper Winding Relevance to Synchronous Machine dq means direct and quadrature. Direct axis is aligned with the rotor’s pole. Quadrature axis refers to the axis whose electrical angle is orthogonal to the electric angle of direct axis. b axis qd q axis q axis d axis qmq qmq qm qa g max ror,min qm a axis ror,max g min c axis P qm 2 P qr qm q qm e 2 2 qm e qd qa ris a axis Park’s Transformation Stator quantities (Sabc) of current, voltage, or flux can be converted to quantities (Sdq0) referenced to the rotor. This conversion comes through the K matrix. S dq0 KS abc where or S abc K 1S dq0 S dq 0 Sd Sa S q , S abc Sb S 0 S c cosq m e 2 / 3 cosq m e 2 / 3 cosq m e 2 K sin q m e sin q m e 2 / 3 sin q m e 2 / 3 3 1 / 2 1/ 2 1/ 2 cosq m e sin q m e 1 K 1 cosq m e 2 / 3 sin q m e 2 / 3 1 cosq m e 2 / 3 sin q m e 2 / 3 1 (MIT’s notation) sin q r sin q r 2 / 3 sin q r 2 / 3 2 K cosq r cosq r 2 / 3 cosq r 2 / 3 3 1 / 2 1/ 2 1/ 2 sin q r cosq r 1 K 1 sin q r 2 / 3 cosq r 2 / 3 1 sin q r 2 / 3 cosq r 2 / 3 1 (Purdue’s notation) Voltage Equations (1) Under motor reference convention for currents (i.e. the positive reference direction for currents is into the machine): For stator windings K d v abc R S i abc λ abc dt 1 K K 1v dq0 KR S K 1i dq0 d K 1λ dq0 dt d K K 1λ dq0 dt v dq0 R S K 1i dq0 1 0 0 R S Rs 0 1 0 0 0 1 d d v dq0 KR S K 1 i dq0 KK 1 λ dq0 K K 1 λ dq0 dt dt v dq0 R S i dq0 d d λ dq0 K K 1 λ dq0 dt dt Voltage Equations (2) We derive the derivative of K-1: cosq m e 0 sin q m e cosq r d 1 K m e sin q m e 2 / 3 cosq m e 2 / 3 0 r cosq r 2 / 3 dt sin q m e 2 / 3 cosq m e 2 / 3 0 cosq r 2 / 3 me dq me dt Then, we get 0 d K K 1 r dt 0 r r 0 0 0 0 0 sin q r 0 sin q r 2 / 3 0 sin q r 2 / 3 0 dq r P me m dt 2 And for stator voltage, we get d R i q r s d dt d vd v R i d d r q s q dt q v0 d R i s 0 0 dt Voltage Equations (3) For rotor windings: We assume the rotor has field winding (magnetic field along d axis), one damper with magnetic field along d axis and one damper with magnetic field along q axis. v fkd kq R r i fkd kq v fkd kq d λ fkd kq dt v f 0 0 R f Rr 0 0 λ fkd kq 0 Rkd 0 f kd kq 0 0 Rkq Voltage Equations (4) In summary: d R i q r d s d dt d vd Rs iq d r q v dt q d R i v0 s 0 dt 0 d v f R f i f f dt 0 d R i 0 k k k d d dt d d kq Rk q ik q dt Dynamical Equations for Flux Linkage d vd v q q d 0 dt f k d k q Let λ dqf we have d q 0 f k d k q dλ dqf dt Rs id qr Rs iq d r v0 Rs i0 v f Rf if Rk d ik d Rk q ik q vd v q V Rs id qr Rs iq d r v0 Rs i0 v f Rf if Rk d ik d Rk q ik q V The derivations so far are valid for both linear and nonlinear models. Flux Linkage vs. Current (1) The next step is to relate current to flux linkage through inductances. For salient pole rotor, the inductances can be approximately expressed as L ss L abcf T L sr Laa Lab Lac L sr L L L L ss ba bb bc L sr L rr Lca Lcb Lcc L L L L cos 2q ls A B me aa 2 L L L L cos 2 q bb ls A B me 3 2 Lcc Lls LA LB cos 2q m e 3 Laf Lak Lak d q Lbf Lbkd Lbkq L rr L L L cf ck ck d q Lf Lkd f L kq f L fkd L fkq Lkd Lkd kq Lkq kd Lkq L L L L cos 2q ls A B r aa 2 or: L L L L cos 2 q bb ls A B r 3 qr qm e 2 L L L L cos 2q 2 cc ls A B r 3 Flux Linkage vs. Current (2) 1 2 L L L L cos 2 q r ba A B ab 2 3 1 L L LA LB cos2q r bc cb 2 1 2 L L L L cos 2 q ca A B r ac 2 3 1 2 L L L L cos 2 q me ba A B ab 2 3 1 L L LA LB cos2q m e bc cb 2 1 2 L L L L cos 2 q ca A B me ac 2 3 L L L cosq fa sf me af 2 L L L cos q bf fb sf me 3 2 Lcf L fc Lsf cosq m e 3 or: qr qm e 2 L L L sin q fa sf r af 2 L L L sin q r bf fb sf 3 2 L L L sin q r cf fc sf 3 Flux Linkage vs. Current (3) L L L sin q kd a sk d r akd 2 L L L sin q bkd kd b sk d r 3 2 Lckd Lkd c Lskd sin q r 3 L L L cosq kd a sk d me akd 2 Lbkd Lkd b Lskd cosq m e 3 2 Lckd Lkd c Lskd cosq m e 3 or: Lak Lk a Lsk sin q m e q q q 2 Lbkq Lkqb Lskq sin q m e 3 2 Lckq Lkq c Lskq sin q m e 3 qr qm e 2 Lak Lk a Lsk cosq r q q q 2 L L L cos q bkq kqb sk q r 3 2 Lckq Lkq c Lskq cosq r 3 Flux Linkage vs. Current (4) L f Llf Lm f Lkd Llkd Lm kd Lkq Llkq Lm kq L fk Lk f d d L fkq Lkq f 0 Lkd kq Lkq kd 0 Note: Higher order harmonics are neglected in the above expressions. Ref: 1. A. E. Fitzgerald, C. Kingsley, Jr., and S. D. Umans, Electric Machinery, 6th Edition, pages 660-661. 2. P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of Electric Machinery and Drive Systems, 2nd Edition, pages 52 and 195. Flux Linkage vs. Current (5) This matrix can be transformed into dq form and used to find flux linkage. i abc λ abc L ss L sr i From λ abcf Labcf i abcf with λ abcf λ L abcf LT L abcf i fk k r sr fk k d d q λ abc L ss i abc L sr i fkd kq K 1 λ dq0 Lss K 1i dq0 Lsr i fkd kq λ dq0 KLss K 1 i dq0 KLsr i fkd kq λ fkd kq LTsr i abc Lrr i fkd kq λ fkd kq LTsr K 1i dq0 Lrr i fkd kq λ dqf Ldqf i dqf where λ dqf λ dq0 λ fkd kq L dqf KL ss K 1 KL sr T 1 L rr L sr K i dqf i dq0 i fkd k q q Inductance Matrix in dq Frame Through derivations, we have L dqf where and From 0 Ld 0 Lq 0 0 3 0 Lsf 2 3 L 0 2 skd 3 0 Lskq 2 Ld Lls Lm d Lq Lls Lm q 3 Lm d ( LA LB ) 2 3 Lm q ( LA LB ) 2 0 0 L0 Lsf 0 0 Lskd 0 0 0 Lf L fkd 0 Lkd f Lkd 0 0 0 L0 Lls λ dqf Ldqf i dqf 0 Lskq 0 0 0 Lkq L dqf KL ss K 1 KL sr T 1 L K L rr sr d Ld id Lsf i f Lskd ikd L i L i q q sk q k q q 0 L0i0 L i 3 L i L i f f sf d fkd k d f 2 3 kd Lkd ikd Lskd id L fkd i f 2 L i 3 L i kq kq sk q kq 2 q Dynamical Equation in terms of Current For linear model from di dqf dt where dλ dqf dt V 1 Ldqf V vd Rs id qr v R i s q d r q v0 Rs i0 V v R i f f f Rk ik d d Rkq ik q and λ dqf Ldqf i dqf dynamical equation in terms of current d Ld id Lsf i f Lsk ik d q Lq iq Lsk ik q q d Power Electrical instantaneous Input Power on Stator can also be expressed through dq0 theory. pin vaia vbib vcic vTabci abc vTdq0 (K 1 )T K 1i dq0 1 0 0 3 1 T 1 (K ) K 0 1 0 2 0 0 2 3 pin vd id vqiq 2v0i0 2 Torque From d R i q r s d dt d vd v R i d d r q s q dt q v0 d R i s 0 0 dt 3 pin vd id vqiq 2v0i0 2 we have dq d0 3 P 3 3 dd 2 2 2 pin Rs id i q 2i0 id iq 2i0 m (d iq q id ) 2 2 dt dt dt 2 2 Copper Loss Magnetic Power in Windings Therefore, electromagnetic torque on rotor Te pm ech m 3P (d iq qid ) 22 Mechanical Power pm ech Equivalent Circuit on d Axis (1) d axis of stator, field winding and d axis damper of rotor can form an equivalent circuit. Let Ld Lls Lm d L f Llf Lm f Lkd Llkd Lm kd From L 3 C N ˆ2 md d a Lm f 2 Cd Nˆ 2f Lsf Cd Nˆ a Nˆ f Lm kd Cd Nˆ k2d Cd 8 0 g Dl ( 1 ) 2 g av P 2 Nˆ a , N̂ f and N̂ k are effective number of turns of d armature, field and d axis damper windings, respectively. Lsk d Cd Nˆ a Nˆ kd L fkd Cd Nˆ f Nˆ kd (Details @ Inductance for SM.ppt) Equivalent Circuit on d Axis (2) Define Lsf 2 i if Lm d 3 ' f Nˆ f if ˆ N and i ' kd a Lskd Lm d ikd 2 Nˆ kd ikd ˆ 3 Na dikd di f did vd Rs id qr Ld Lsf Lskd dt dt dt d (id i 'f ik' d ) did Rs id qr Lls Lm d dt dt Define Nˆ a ' v f Nv f and N ˆ Nf dikd di f 3 did v f Rf i f Lf Lsf L fkd dt 2 dt dt Nv f NR f i f NLlf di f dt NLm f dikd did 3 NLsf NL fkd dt 2 dt dt di f ' di f did Nˆ a 3 Nˆ a 3 2 ' 3 2 di f Nv f N R f i f N Llf Lsf Lm d L fkd ˆ ˆ dt dt N f 2 N kd 2 2 dt dik' d dt Equivalent Circuit on d Axis (3) v 'f R 'f i 'f L'lf where di 'f dt 3 Nˆ a ' Rf 2 Nˆ f dt 2 Rf 2 3 Nˆ a L 2 Nˆ f Llf 0 Rkd ikd Lkd dikd ' lf From Lm d d (id i 'f ik' d ) Rkd ikd Llkd L fkd Lm d 2 Nˆ f Nˆ kd 3 Nˆ a2 di f did 3 Lskd L fkd dt 2 dt dt dikd dikd 3 di f did Lm kd Lskd L fkd dt dt 2 dt dt 2 Lm d 3 Lsk d Nˆ a Nˆ kd above next page Equivalent Circuit on d Axis (4) 3 Nˆ a 0 2 Nˆ kd 2 ˆ R i' 3 Na kd kd 2 Nˆ k d 0R i L dik' d 3 Nˆ a ' Rkd 2 Nˆ kd R kd 3 Nˆ a 2 Nˆ kd L lkd ' ' kd kd ' lkd 2 2 ' ˆ2 dik' d 3 Nˆ a dik' d di di N 3 a L L Lm d d L fkd f lkd m kd dt 2 Nˆ kd dt dt 2 Nˆ f Nˆ kd dt dt Lm d d (id i 'f ik' d ) dt where L'lkd 2 Lm d Lm kd 2 Lm d L fkd 3 Nˆ a 2 Nˆ kd 3 Nˆ a2 2 Nˆ Nˆ f kd 2 Equivalent Circuit on d Axis (5) From d (id i 'f ik' d ) did vd Rs id qr Lls Lm d dt dt v R i L ' f ' ' f f ' lf 0 Rk' d ik' d L'lkd di 'f dt ' kd di dt Lm d Lm d d (id i 'f ik' d ) dt d (id i 'f ik' d ) dt we get ik' d im d id i 'f ik' d d Ld id Lsf i f Lsk ik d Llsid Lm dim d d Equivalent Circuit on q Axis (1) q axis equivalent circuit and q axis damper equivalent circuit can be combined: Let Lq Lls Lm q Lkq Llkq Lm kq From 3 Cq Nˆ a2 2 Cq Nˆ k2q Lm q Lm kq Lsk q Cq Nˆ a Nˆ k Cq q 8 0 Dl ( 1 ) 2 g av P 2 N̂ s and N̂ k are effective number of turns of d stator and q axis damper windings, respectively. (Details @ Inductance for SM.ppt) Equivalent Circuit on q Axis (2) vq Rs iq d r Lq Rs iq d r Llq Rs iq d r Llq From diq dt diq dt diq dt Lsk q Lm q Lm q 0 Rkq ikq Lkq Rkq ikq Llkq dikq dt diq Lsk q dikq dt dt d (iq ik' q ) dt where ik' d Lsk q Lm d ik q 2 3 Nˆ k q ik q ˆ N a dikq diq 3 Lskq dt 2 dt dikq dikq 3 diq Lm kq Lskq dt dt 2 dt 2 Lm q Nˆ a 3 Lsk Nˆ k q q above next page Equivalent Circuit on q Axis (3) 3 Nˆ a 0 2 Nˆ kq 2 ˆ R i' 3 Na kq kq 2 Nˆ k q 0 Rk' q ik' q L'lkq dik' q dt Lm q 2 dik' q 3 Nˆ a L lk q dt 2 Nˆ kq 2 dik' q diq L L mq m kq dt dt d (iq ik' q ) dt where 2 3 Nˆ a ' Rk q 2 Nˆ k q R kq 3 Nˆ a 2 Nˆ k q L lkq ' lk q L 2 Lm q Lm kq Lm q L fkq 3 Nˆ a 2 Nˆ kq 3 Nˆ a2 2 Nˆ Nˆ f kq 2 Equivalent Circuit on q Axis (4) From vq Rs iq d r Llq 0 Rk' q ik' q L'lkq diq dt dik' q dt Lm q Lm q d (iq ik' q ) dt d (iq ik' q ) dt we get ik' q im q iq ik' q q Lq iq Lsk ik q q Llsiq Lm qim q Equivalent Circuit on 0 Axis 0 axis v0 Rs i0 L0 di0 dt This circuit is not necessary for Y connected windings since i0=0. Dynamical Equations from Equivalent Circuits (1) vd Rsd id r q Llsd vq Rsq iq r d Llsq 0 Rk' d ik' d L'lkd 0 Rk' q ik' q L'lkq v 'f R 'f i 'f L'lf v0 Rs 0i0 Lls 0 where dik' d dt dik' q dt di 'f dt di0 dt im d id i 'f ik' d im q iq ik' q did di Lm d m d dt dt diq di Lm q m q dt dt Lm d Lm q Lm d dim d dt dim q dt dim d dt Dynamical Equations from Equivalent Circuits (2) The equations can be written in matrix form as: L where Llsd Lm d 0 0 L Lm d Lm d 0 id i q i0 I ' if ik' 'd ik q dI V dt 0 Llsq Lm q 0 0 0 Lm q or 0 0 Lls 0 0 0 0 vd v q V dI L1V dt Lm d 0 0 L'lf Lm d Lm d 0 Lm d 0 0 Lm d L'lkd Lm d 0 Rsd id r q Rsq iq r d v0 Rs 0i0 v 'f R 'f i 'f ' ' Rk d ik d Rk' q ik' q 0 Lm q 0 0 0 L'lkq Lm q dq Theory for Synchronous Machine without Damper Winding Relevance to Synchronous Machine dq means direct and quadrature. Direct axis is aligned with the rotor’s pole. Quadrature axis refers to the axis whose electrical angle is orthogonal to the electric angle of direct axis. b axis qd q axis q axis d axis qmq qmq qm qa g max ror,min qm a axis ror,max g min c axis P qm 2 P qr qm q qm e 2 2 qm e qd qa ris a axis Park’s Transformation Stator quantities (Sabc) of current, voltage, or flux can be converted to quantities (Sdq0) referenced to the rotor. This conversion comes through the K matrix. S dq0 KS abc where or S abc K 1S dq0 S dq 0 Sd Sa S q , S abc Sb S 0 S c cosq m e 2 / 3 cosq m e 2 / 3 cosq m e 2 K sin q m e sin q m e 2 / 3 sin q m e 2 / 3 3 1 / 2 1/ 2 1/ 2 cosq m e sin q m e 1 K 1 cosq m e 2 / 3 sin q m e 2 / 3 1 cosq m e 2 / 3 sin q m e 2 / 3 1 (MIT’s notation) sin q r sin q r 2 / 3 sin q r 2 / 3 2 K cosq r cosq r 2 / 3 cosq r 2 / 3 3 1 / 2 1/ 2 1/ 2 sin q r cosq r 1 K 1 sin q r 2 / 3 cosq r 2 / 3 1 sin q r 2 / 3 cosq r 2 / 3 1 (Purdue’s notation) Voltage Equations (1) Under motor reference convention for currents (i.e. the positive reference direction for currents is into the machine): For stator windings K d v abc R S i abc λ abc dt 1 K K 1v dq0 KR S K 1i dq0 d K 1λ dq0 dt d K K 1λ dq0 dt v dq0 R S K 1i dq0 1 0 0 R S Rs 0 1 0 0 0 1 d d v dq0 KR S K 1 i dq0 KK 1 λ dq0 K K 1 λ dq0 dt dt v dq0 R S i dq0 For field winding: d d λ dq0 K K 1 λ dq0 dt dt v f Rf i f d λf dt Voltage Equations (2) We derive the derivative of K-1: cosq m e 0 sin q m e cosq r d 1 K m e sin q m e 2 / 3 cosq m e 2 / 3 0 r cosq r 2 / 3 dt sin q m e 2 / 3 cosq m e 2 / 3 0 cosq r 2 / 3 me dq me dt Then, we get 0 d K K 1 r dt 0 r r 0 0 0 0 0 sin q r 0 sin q r 2 / 3 0 sin q r 2 / 3 0 dq r P me m dt 2 And for voltage, we get d R i q r s d dt d vd d v Rs iq q d r dt q d v0 R i s 0 0 dt v f d Rf if f dt Dynamical Equations for Flux Linkage d vd d q vq dt 0 f Let λ dqf we have d q 0 f Rs id qr Rs iq d r v0 Rs i0 v f Rf i f vd v q V dλ dqf dt Rs id qr Rs iq d r v0 Rs i0 v f Rf i f V The derivations so far are valid for both linear and nonlinear models. Flux Linkage vs. Current (1) The next step is to relate current to flux linkage through inductances. For salient pole rotor, the inductances can be approximately expressed as L ss L sf L abcf T L L sf f Laa Lab Lac L ss Lba Lbb Lbc Lca Lcb Lcc L L L L cos 2q ls A B me aa 2 L L L L cos 2 q bb ls A B me 3 2 Lcc Lls LA LB cos 2q m e 3 Laf L sf Lbf Lcf L L L L cos 2q ls A B r aa 2 or: L L L L cos 2 q bb ls A B r 3 qr qm e 2 L L L L cos 2q 2 cc ls A B r 3 Flux Linkage vs. Current (2) 1 1 2 2 L L L L L L L L cos cos 2 2 q q ab ba ba A A B B me r ab 2 2 3 3 1 1 Lbc Lcb LA LB cos2q m e Lbc Lcb LA LB cos2q r 2 2 1 1 2 2 L L L L L L L L cos cos 2 2 q q ca ca A A B B me r ac ac 2 2 3 3 or: L L L sin q L L L cosq fa sf r fa sf me af qr qm e af 2 2 2 L L L sin q bf fb sf r Lbf L fb Lsf cosq m e 3 3 2 2 L L L sin q cf fc sf r Lcf L fc Lsf cosq m e 3 3 Note: Higher order harmonics are neglected. Ref: 1. A. E. Fitzgerald, C. Kingsley, Jr., and S. D. Umans, Electric Machinery, 6th Edition, pages 660-661. 2. P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of Electric Machinery and Drive Systems, 2nd Edition, page 52. Flux Linkage vs. Current (3) This matrix can be transformed into dq0 form and used to find flux linkage. i abc L ss L sf λ abc From λ abcf Labcf i abcf with λ abcf L abcf LT L i abcf i f f sf f λ abc Lss i abc Lsf i f K 1 λ dq0 L ss K 1i dq0 L sf i f λ dq0 KL ss K 1 i dq0 KL sf i f λ f LTsf i abc L f i f λ f LTsf K 1i dq0 L f i f λ dqf Ldqf i dqf where λ dqf λ dq0 f L dqf KL ss K 1 KL sf T 1 L K L sf f i dqf i dq0 if Inductance Matrix in dq0 Frame Through derivations, we have L dqf where and From Ld 0 0 3 Lsf 2 0 Lq 0 0 0 L0 0 0 Lsf 0 0 Lf L dqf KL ss K 1 KL sf T 1 L K L sf f Ld Lls Lm d Lq Lls Lm q L0 Lls 3 Lm d ( LA LB ) 2 3 Lm q ( LA LB ) 2 λ dqf Ldqf i dqf d q 0 f Ld id Lsf i f Lq iq Lls i0 3 L f i f Lsf id 2 Dynamical Equation in terms of Current For linear model from di dqf dt dλ dqf dt V 1 Ldqf V and λ dqf Ldqf i dqf dynamical equation in terms of current where vd v q V Rs id qr Rs iq d r v0 Rs i0 v f Rf i f d Ld id Lsf i f q Lq iq Power Electrical instantaneous Input Power on Stator can also be expressed through dq0 theory. pin vaia vbib vcic vTabci abc vTdq0 (K 1 )T K 1i dq0 1 0 0 3 1 T 1 (K ) K 0 1 0 2 0 0 2 3 pin vd id vqiq 2v0i0 2 Torque From d R i q r s d dt d vd v R i d d r q s q dt q v0 d R i s 0 0 dt 3 pin vd id vqiq 2v0i0 2 we have dq d0 3 P 3 3 dd 2 2 2 pin Rs id i q 2i0 id iq 2i0 m (d iq q id ) 2 2 dt dt dt 2 2 Copper Loss Magnetic Power in Windings Therefore, electromagnetic torque on rotor Te pm ech m 3P (d iq qid ) 22 Mechanical Power pm ech Equivalent Circuits (1) d R i q r d Ld id Lsf i f s d dt d vd d q Lq iq v Rs iq q d r dt q 0 Lls i0 d v0 R i s 0 0 L i 3 L i dt f f sf d v f f 2 d Rf if f dt di f did d axis vd Rs id qr Ld Lsf dt dt Equivalent Circuits (2) q axis 0 axis vq Rs iq d r Lq v0 Rs i0 L0 diq dt di0 dt This circuit is not necessary for Y connected windings since i0=0. Equivalent Circuits (3) Field winding v f Rf i f Lf di f dt di 3 Lsf d 2 dt Combined Equivalent Circuit on d Axis (1) d axis equivalent circuit and field winding equivalent circuit can be combined: Ld Lls Lm d L f Llf Lm f From 3 Cd Nˆ a2 2 Cd Nˆ 2f Lm d Lm f Cd 8 0 g Dl (1 ) 2 g av P 2 N̂ a and N̂ f are effective number of turns of armature and (Details @ InductanceSM.ppt) field windings. ˆ L N Let N a 2 Lm d sf 3 Lsf Lm f Nˆ f di f did vd Rs id qr Ld Lsf dt dt Lsf 2i f ' ' d ( i i ) di if if d f Rs id qr Lls d Lm d Lm d 3N dt dt Lsf Cd Nˆ a Nˆ f Combined Equivalent Circuit on d Axis (2) v f Rf i f Lf di f dt Nv f NR f i f NLlf di 3 Lsf d 2 dt di f dt NLm f if 3 ' Ni f 2 di f Lsf 2 Lm d N 3 Lsf Lm f di 3 NLsf d dt 2 dt ' di f di 3 2 ' 3 2 di f Nv f N R f i f N Llf Lsf Lm d d dt dt 2 2 dt v 'f R 'f i 'f L'lf di 'f dt Lm d d (id i 'f ) dt v 'f Nv f 3 2 N Rf 2 3 L'lf N 2 Llf 2 R 'f Combined Equivalent Circuit on d Axis (3) From d (id i 'f ) did vd Rs id qr Lls Lm d dt dt v R i L ' f ' ' f f ' lf di ' f dt Lm d d (id i ) ' f dt we get im d id i 'f d Ld id Lsf i f Lls id Lm dim d v 'f Nv f if 3 ' Ni f 2 dq Theory for Permanent Magnet Synchronous Machine (PMSM) Relevance to PM Machine dq means direct and quadrature. Direct axis is aligned with the rotor’s pole. Quadrature axis refers to the axis whose electrical angle is orthogonal to the electric angle of direct axis. b axis qd q axis qmq qm d axis qa a axis P qm 2 P qr qm q qm e 2 2 qm e c axis Park’s Transformation Stator quantities (Sabc) of current, voltage, or flux can be converted to quantities (Sdq0) referenced to the rotor. This conversion comes through the K matrix. S dq0 KS abc where or S abc K 1S dq0 S dq 0 Sd Sa S q , S abc Sb S 0 S c cosq m e 2 / 3 cosq m e 2 / 3 cosq m e 2 K sin q m e sin q m e 2 / 3 sin q m e 2 / 3 3 1 / 2 1/ 2 1/ 2 cosq m e sin q m e 1 K 1 cosq m e 2 / 3 sin q m e 2 / 3 1 cosq m e 2 / 3 sin q m e 2 / 3 1 (MIT’s notation) sin q r sin q r 2 / 3 sin q r 2 / 3 2 K cosq r cosq r 2 / 3 cosq r 2 / 3 3 1 / 2 1/ 2 1/ 2 sin q r cosq r 1 K 1 sin q r 2 / 3 cosq r 2 / 3 1 sin q r 2 / 3 cosq r 2 / 3 1 (Purdue’s notation) Voltage Equations (1) Under motor reference convention for currents (i.e. the positive reference direction for currents is into the machine): For stator winding K d v abc R S i abc λ abc dt 1 K K 1v dq0 KR S K 1i dq0 d K 1λ dq0 dt d K K 1λ dq0 dt v dq0 R S K 1i dq0 1 0 0 R S Rs 0 1 0 0 0 1 d d v dq0 KR S K 1 i dq0 KK 1 λ dq0 K K 1 λ dq0 dt dt v dq0 R S i dq0 d d λ dq0 K K 1 λ dq0 dt dt Voltage Equations (2) We derive the derivative of K-1: cosq m e 0 sin q m e cosq r d 1 K m e sin q m e 2 / 3 cosq m e 2 / 3 0 r cosq r 2 / 3 dt sin q m e 2 / 3 cosq m e 2 / 3 0 cosq r 2 / 3 me dq me dt Then, we get 0 d K K 1 r dt 0 r r 0 0 0 0 0 sin q r 0 sin q r 2 / 3 0 sin q r 2 / 3 0 dq r P me m dt 2 And for voltage, we get d R i q r s d dt d vd v R i d d r q s q dt q v0 d R i s 0 0 dt Dynamical Equations for Flux Linkage d vd Rs id qr d v R i q q s q d r dt 0 v0 Rs i0 Let vd Rs id qr V vq Rs iq d r v0 Rs i0 d λ dq0 q 0 we have dλ dq0 dt V The derivations so far are valid for both linear and nonlinear models. Flux Linkage vs. Current (1) The next step is to relate current to flux linkage through inductances. For salient pole rotor, the inductances can be approximately expressed as Laa Lab Lac L abc Lba Lbb Lbc Lca Lcb Lcc L L L L cos 2q ls A B me aa 2 L L L L cos 2 q bb ls A B me 3 2 Lcc Lls LA LB cos 2q m e 3 L L L L cos 2q ls A B r aa 2 or: L L L L cos 2 q bb ls A B r 3 qr qm e 2 L L L L cos 2q 2 cc ls A B r 3 Note: Higher order harmonics are neglected. Flux Linkage vs. Current (2) 1 2 L L L L cos 2 q me ba A B ab 2 3 1 L L LA LB cos2q m e bc cb 2 1 2 L L L L cos 2 q ca A B me ac 2 3 1 2 L L L L cos 2 q r ba A B ab 2 3 1 L L LA LB cos2q r bc cb 2 1 2 L L L L cos 2 q ca A B r ac 2 3 or: qr qm e 2 Note: Higher order harmonics are neglected. Ref: 1. A. E. Fitzgerald, C. Kingsley, Jr., and S. D. Umans, Electric Machinery, 6th Edition, pages 660-661. 2. P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of Electric Machinery and Drive Systems, 2nd Edition, page 52, also pages 264-265. Flux Linkage vs. Current (4) This matrix can be transformed into dq0 form and used to find flux linkage. λ abc L abci abc λ PMabc K 1 λ dq0 L abcf K 1i dq0 λ PMabc K K 1λ dq0 KL abc K 1i dq0 Kλ PMabc λ dq0 KL abcK 1 i dq0 Kλ PMabc λ dq0 Ldq0i dq0 λ PMdq0 where cos(q m e) sin(q r ) or: λ PMabc PM cos(q m e 2 / 3) λ PMabc PM sin(q r 2 / 3) cos(q m e 2 / 3) q r q m e sin(q r 2 / 3) 2 Inductance Matrix in dq0 Frame Therefore, we get the following inductance matrix in dq0 frame: PM Ld 0 0 L dq0 KL abcK 1 0 Lq 0 λ PMdq0 Kλ PMabc 0 0 0 L0 0 where Ld Lls Lm d Lq Lls Lm q L0 Lls and From 3 Lm d ( LA LB ) 2 3 Lm q ( LA LB ) 2 λ dq0 Ldq0i dq0 λ PMdq0 d Ld id PM q Lqiq L i 0 ls 0 Dynamical Equation in terms of Current For linear model from di dq0 dt where dλ dq0 dt V 1 Ldq 0V vd Rs id qr V vq Rs iq d r v0 Rs i0 and λ dq0 Ldq0i dq0 λ PMdq0 dynamical equation in terms of current d Ld id PM q Lqiq L dq0 Ld 0 0 0 Lq 0 0 0 L0 (vd Rs id r Lqiq ) / Ld id d i ( v R i L i ) / L q q s q r d d r PM q dt i0 (v0 Rs i0 ) / L0 1 i (ia ib ic ) 0 , only need to consider For Y connected winding, since 0 3 the first two equations for id and iq. Power Electrical instantaneous Input Power on Stator can also be expressed through dq0 theory. pin vaia vbib vcic vTabci abc vTdq0 (K 1 )T K 1i dq0 1 0 0 3 1 T 1 (K ) K 0 1 0 2 0 0 2 3 pin vd id vqiq 2v0i0 2 Torque From 3 pin vd id vqiq 2v0i0 2 we have d R i q r s d dt d vd v R i d d r q s q dt q v0 d R i s 0 0 dt dq d0 3 P 3 3 dd 2 2 2 pin Rs id i q 2i0 id iq 2i0 m (d iq q id ) 2 2 dt dt dt 2 2 Copper Loss Magnetic Power in Windings Mechanical Power pm ech Therefore, electromagnetic torque on rotor Te pm ech m 3P (d iq qid ) 22 d Ld id PM q Lqiq 3P Te PM iq ( Ld Lq )id iq 22 Dynamical Equations of Motion dm J Te TL Tdam p dt dq m m dt where 3P Te PM iq ( Ld Lq )id iq KT iq 22 KT For round rotor machine, Tdamp Dmm Te 3P PM ( Ld Lq )id iq 4 Ld Lq torque constant 3P Te PM iq 4 3P KT PM 4 Dm is combined damping coefficient of rotor and load.