Review of 1`st Order Circuit Analysis
advertisement

ECEN 2260
Circuits/Electronics 2
Spring 2007
1-17-07
P. Mathys
Review of 1’st Order Circuit Analysis
1
First Order Differential Equation
Consider the following RC circuit with input voltage vS (t) and output voltage vO (t).
+ ◦
R
iR (t) →
•
↓ iC (t)
vS (t)
◦ +
vO (t)
C
− ◦
•
(1)
◦ −
(1)
Recall that for capacitors iC (t) = C vC (t), where vC (t) denotes the first derivative (with
respect to t) of vC (t). Using KCL
iR (t) = iC (t)
vS (t) − vO (t)
(1)
= C vO (t) .
R
=⇒
Thus, the differential equation for this circuit is
(1)
RC vO (t) + vO (t) = vS (t) ,
with initial condition vO (0) = V0 . Another way to write this is
(1)
vO (t) =
1
1
vS (t) −
vO (t) .
RC
RC
This can be visualized using a block diagram with an integrator as shown below.
vS (t)
1
RC
+
(1)
+
−
vO (t)
R
V0
1
•
1
RC
vO (t)
2
Natural Response
To obtain the natural response (or homogeneous solution) of the 1’st order differential equa(1)
tion RC vO (t) + vO (t) = vS (t), set vS (t) = 0 and assume a solution of the form
vN (t) = K est ,
t≥0,
(1)
vN (t) = Ks est ,
=⇒
t≥0,
for some constants K and s. Substitute in the differential equation to obtain
RC Ks est + K est = K (RCs + 1) est = 0 .
The nontrivial solution is
RCs + 1 = 0
=⇒
s=
−1
RC
vN (t) = K e−t/RC ,
=⇒
t≥0.
Because the voltage across a capacitor is a state variable, the initial condition V0 is the
voltage across the capacitor at time t = 0, i.e.,
V0 = vO (0) = vN (0) = K
3
vN (t) = V0 e−t/RC ,
=⇒
t≥0.
Forced Response: Step Input
Let vS (t) = VA u(t) and assume a forced response (or particular solution) of the form
vF (t) = VF ,
t≥0,
=⇒
(1)
vF (t) = 0 ,
t≥0.
Substitute in the differential equation to obtain
VF = VA
=⇒
vF (t) = VA ,
t≥0.
Next use superposition to combine the natural and forced solutions as
vO (t) = vN (t) + vF (t) = K e−t/RC + VA ,
t≥0.
Then use the initial condition V0 = vO (0) to solve for K
V0 = vO (0) = K + VA
=⇒
K = V0 − VA .
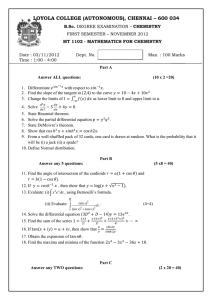
This yields the complete solution as
vO (t) = (V0 − VA ) e−t/RC + VA = V0 e−t/RC + VA (1 − e−t/RC ,
| {z } |
|
{z
} |{z}
{z
}
ZIR
forced
ZSR
natural
t≥0.
The natural solution is also called transient response and the forced solution is also called
steady-state response. ZIR stands for zero-input response and ZSR stands for zero-state
response. The following graph shows vO (t) when V0 ≈ VA /3.
2
VA
V0
0
4
0
RC
2RC
3RC
t
Forced Response: Sinusoidal Input
Let vS (t) = VA cos ωt, t ≥ 0 and assume a solution of the form
vF (t) = VF cos(ωt + φ) = a cos ωt + b sin ωt ,
where the Fourier coefficients a, b are given by (from cos(α + β) = cos α cos β − sin α sin β)
b = −VF sin φ ,
a = VF cos φ ,
and thus
VF =
√
φ = − tan−1
a2 + b 2 ,
b
.
a
The first derivative of vF (t) (in Fourier coefficient format) is
(1)
vF (t) = −aω sin ωt + bω cos ωt ,
t≥0.
After substituting in the differential equation one obtains
RC(−aω sin ωt + bω cos ωt) + a cos ωt + b sin ωt = VA cos ωt ,
t≥0.
Since cos ωt and sin ωt are orthogonal functions, this yields the following two equations (one
for the coefficents of all the cos ωt terms and one for all the coefficients of the sin ωt terms)
a + b RCω = VA ,
and
− a RCω + b = 0 .
In matrix-vector form this is
1
RCω
−RCω
1
a
V
= A .
b
0
Using Kramer’s rule to solve for a and b yields
VA RCω 0
1 VA
=
a = ,
1 + (RCω)2
RCω 1
−RCω
1 3
and
1
V
A
−RCω 0 VA RCω
=
b = .
2
1
+
(RCω)
1
RCω
−RCω
1 Using superposition, the solution for vO (t) is the sum of vN (t) and vF (t), i.e.,
vO (t) = K e−t/RC +
VA
(cos ωt + RCω sin ωt) ,
1 + (RCω)2
t≥0.
To solve for K the initial condition vO (0) = V0 is used
V0 = K +
VA
1 + (RCω)2
=⇒
K = V0 −
VA
.
1 + (RCω)2
Thus, the complete solution is
VA
VA
vO (t) = V0 −
e−t/RC +
(cos ωt + RCω sin ωt) .
2
1 + (RCω)
1 + (RCω)2
|
{z
} |
{z
}
transient response
steady-state response
5
Frequency Response
More physical insight can be gained by converting the steady-state response from the Fourier
coefficient format back to the form VF cos(ωt + φ). This results in
√
VA
b
VF = a2 + b2 = p
and φ = − tan−1 = − tan−1 RCω ,
a
1 + (RCω)2
and thus
VA
VA
vO (t) = V0 −
e−t/RC + p
cos(ωt − tan−1 RCω) .
2
2
1 + (RCω)
1
+
(RCω)
|
{z
} |
{z
}
transient response
steady-state response
The combination of VF and φ is called the frequency response of the circuit. Individually, VF
is called the magnitude of the frequency response and φ is called the phase of the frequency
response. If a circuit has a frequency response magnitude that is larger for lower frequencies
than higher frequencies, it is called a lowpass filter (LPF). Conversely, if a circuit has a
frequency response magnitude that is smaller for lower frequencies than higher frequencies,
it is called a highpass filter (HPF).
Of special importance is the (cutoff) frequency ωc at which the output power of the circuit
is reduced to one half of the input power. For VF as given above, this occurs for ωc = 1/RC
as can be easily seen from
VA
VA
VF ω=1/RC = p
= √ = 0.707 VA .
2
2
1 + (RC/RC)
4
Note that at ω = ωc
φω=1/RC = −tan−1 (RC/RC) = − tan−1 1 = −45◦ .
6
Phasors
Using Euler’s relationship
ejθ = cos θ + j sin θ ,
a sinusoid of the form v(t) = VA cos(ωt + φ) can be expressed as
v(t) = VA cos(ωt + φ) = Re{VA ej(ωt+φ) } = Re{VA ejφ ejωt } .
| {z }
=V
The quantity
V = VA ejφ
is called the (complex-valued) phasor representation of v(t). This can be expressed symbolically as
v(t) ⇐⇒ V .
Linearity (and thus the superposition principle) holds for phasors, i.e.,
K1 v1 (t) + K2 v2 (t)
⇐⇒
K 1 V 1 + K2 V 2 ,
for arbitrary real constants K1 and K2 . Note that v1 (t) and v2 (t) must both be sinusoids of
the same frequency for this to hold. The phasor representation of the derivative of v(t) is
obtained from
d
d
V ejωt = Re{jωV ejωt } ,
v (1) (t) = Re{V ejωt } = Re
dt
dt
and thus
v (1) (t)
⇐⇒
jωV .
The i(t)-v(t) characteristic of a resistor can be expressed as
⇐⇒
vR (t) = R iR (t)
VR = R IR
=⇒
Z =R.
IC = jωC VC
=⇒
Z=
VL = jωL IL
=⇒
Z = jωL .
For capacitors one obtains
(1)
iC (t) = C vC (t)
⇐⇒
1
.
jωC
For inductors the relationships are
(1)
vL (t) = L iL (t)
⇐⇒
5
7
Phasor Analysis
The figure below shows the RC LPF circuit labeled for phasor analysis.
R
+ ◦
•
◦ +
1
jωC
VS
− ◦
VO
•
◦ −
Using voltage division one obtains immediately
VO =
1
jωC
R+
1
jωC
VS =
1
VS .
jωRC + 1
Multiplying through by jωRC + 1 yields the relationship
jωRC VO + VO = VS
⇐⇒
(1)
RC vO (t) + vO (t) = vS (t) ,
i.e., the differential equation can be obtained directly from the phasor analysis (and vice
versa).
Dividing the output phasor VO = VO ejφO by the input phasor VS = VS ejφS , one can define
the transfer function H of the circuit as
H=
VO ejφO
VO j(φO −φS )
VO
=
=
e
.
jφ
S
VS
Vs e
VS
Note that H is a complex quantity in general that can be written as
H = |H| ej∠H .
The quantity |H| = VO /VS is the magnitude of the frequency response and ∠H = φO − φS
is the phase of the frequency response of the circuit. For the RC LPF circuit
H=
1
1
1 − jωRC
−1
=
=p
e−j tan ωRC ,
2
1 + jωRC
1 + (ωRC)
1 + (ωRC)2
p
−1
where |H| =
1 + (ωRC)2
is the magnitude and ∠H = − tan−1 ωRC is the phase of
the frequency response of the circuit. This is the same result as found earlier from the forced
solution of the differential equation for a sinusoidal input signal.
6
8
Analysis of RC Highpass Filter
If the roles of the capacitor and the resistor are interchanged, then the RC circuit shown
below is obtained.
+ ◦
iC (t) →
C
•
+ v (t) −
C
vS (t)
↓ iR (t)
◦ +
vO (t)
R
− ◦
•
◦ −
Because of the capacitor in series with the input signal vS (t), this circuit does not pass dc,
but passes high frequencies and is therefore a highpass filter or differentiator. Starting from
the phasor analysis this time, the schematic is relabeled as follows:
1
jωC
+ ◦
VS
+ V −
C
− ◦
•
◦ +
VO
R
•
◦ −
Using voltage division yields immediately
VO =
R
jωRC
VS ,
1 VS =
jωRC + 1
R + jωC
which translates into the differential equation
jωRC VO + VO = jωRC VS
⇐⇒
(1)
(1)
RC vO (t) + vO (t) = RC vS (t) .
The frequency response of the circuit is found as
H=
VO
jωRC
jωRC (1 − jωRC)
ωRC
=
=
=
(j + ωRC) .
2
VS
1 + jωRC
1 + (ωRC)
1 + (ωRC)2
The magnitude |H| and the phase ∠H of the frequency response are therefore
ωRC
|H| = p
1 + (ωRC)2
∠H = tan−1
,
1
.
ωRC
√
The half-power (or cutoff) frequency is ωc = 1/RC and |H|ωc = 1/ 2 and ∠Hωc = tan−1 1 =
45◦ .
7
To derive the step response of the system with a specified initial condition, the form of
the differential equation obtained above is not suitable because vO (t) is not a state variable
of the system. In this case it is better to first derive a differential equation for the state
variable vC (t) = vS (t) − vO (t), and then to obtain vO (t) as a function of vC (t). Noting that
vO (t) = vS (t) − vC (t) and iC (t) = iR (t) one can write
(1)
vO (t) = vS (t) − vC (t) = R iC (t) = RC vC (t)
(1)
=⇒
RC vC (t) + vC (t) = vS (t) ,
with initial condition vC (0) = V0 . Since iC (t) = iR (t), the output voltage is related to vC (t)
by
(1)
vO (t) = R iC (t) = RC vC (t) .
This is shown in block diagram form in the following figure:
vO (t)
RC
vS (t)
1
RC
+
(1)
+
−
vC (t)
•
R
V0
vC (t)
1
RC
The natural solution of the differential equation for vC (t) is vN = K e−t/RC , t ≥ 0, and the
forced solution in response to a step input vS (t) = VA u(t) is vF (t) = VA , t ≥ 0. Combining
vN (t) and vF (t) and using the initial condition vC (0) = V0 to solve for K yields
vC (t) = (V0 − VA ) e−t/RC + VA ,
t≥0.
(1)
Thus, vO (t) = RC vC (t) in response to a step input of amplitude VA is
vO (t) = (VA − V0 ) e−t/RC = VA e−t/RC − V0 e−t/RC ,
| {z } | {z }
ZSR
ZIR
c
2003–2007,
P. Mathys.
t≥0.
Last revised: 1-23-07, PM.
8