SLIDES: Aug 23
advertisement

Definitions:
1
Given an n-dimensional vector space X and basis set
V = {v1 , ..., vn } for X , the coordinate mapping crdV : X → Rn is
defined by, for x ∈ X , crdV (x) = α = (α1 , ...αn ), where α is the
unique linear combination of the elements of V s.t. x = ∑ni=1 αi vi .
2
Let X and Y be n- and m-dimensional vector spaces with basis
sets U and V. Given T ∈ L(X , Y ), define M T by for i = 1, ...n, the
i’th column of M T is crdV (T (vi )). M T is the matrix representation
of T given bases U and V.
3
Define the mapping MtxV,U : L(X , Y ) → Fm×n by for T ∈ L(X , Y ),
MtxV,U (T ) = M T , the matrix rep. of T given bases U and V.
1
2
FIRST subscript identifies the basis w.r.t. which points in range of
T are represented.
SECOND subscript identifies the basis set on which T is defined
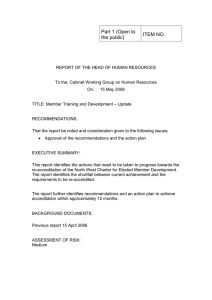
matrix rep of v w.r.t. std basis
v = (1.5, 2)
matrix rep of v w.r.t. alt basis
v = (2.23, 1.12)
b
2
e2 = (0, 1)
a vector v ∈ V
v
1
b
e1
= (1, 0)
Figure 1. Different representations of a vector
=
√ 5
1)/
(2,
u2
2
0.5
1
1
-1
-0.5
0.5
1
u1
-2
-1
T (u2 )
T (u1 )
1
2
-1
-0.5
-2
-1
Figure 2. We know nothing about the matrix A, only know what T does to U
1
v1
T (v2 ) =
0.5
-1
-0.5
T (v1 ) =
2
v2
0.5
1
−1 √1
√
, 2
2
-2
√3 , √3
2
2
1
-1
1
2
-1
-0.5
-2
-1
Figure 3. MtxU,V (T ): the transformation of V by T , expressed in terms of U
FIRST subscript—i.e., U—identifies basis (i.e., standard one) in
terms of which points in the range of T are represented
SECOND subscript—i.e., V—identifies the points in the domain
of T for which T is initially defined.
;;
1
v1
T (v2 ) = (0, 1)
0.5
-1
T (v1 ) = (3, 0)
2
v2
-0.5
0.5
1
-2
1
-1
1
2
-1
-0.5
-2
-1
Figure 4. MtxV,V (T ): the transformation of V by T , expressed in terms of V
FIRST subscript—i.e., V—identifies basis (i.e., basis of e/v’s) in
terms of which points in the range of T are represented
SECOND subscript—i.e., V—identifies the points in the domain
of T for which T is initially defined.
u2
T (u2 ) = (2.1213, 0.7071)
1
2
XD
0.5
-1
-0.5
T (u1 ) = (2.1213, −0.7071)
1
0.5
1
u1
-2
-1
1
2
-1
-0.5
-2
-1
Figure 5. MtxV,U (T ): the transformation of U by T , expressed in terms of V
FIRST subscript—i.e., V—identifies basis (i.e., basis of e/v’s) in
terms of which points in the range of T are represented
SECOND subscript—i.e., U—identifies the points in the domain
of T for which T is initially defined.
Theorem: Let X , Y and Z be finite dimensional vector spaces with
bases U,V and W respectively, and suppose S ∈ L(X , Y ) and
T ∈ L(Y , Z ). Then
MtxW,V (T ) · MtxV,U (S )
=
MtxW,U (T ◦ S )
where for x ∈ X , the composition mapping T ◦ S is defined by, for
x ∈ X , T ◦ S (x) = T (S (x)).
(1)
u2
1
v2 = S(u2 )
T (v2 ) = T ◦ S(u2 )
0.5
-1
-0.5
u1
0.5
-2
1
T (v1 ) = T ◦ S(u1 )
2
v1 = S(u1 )
1
-1
1
2
-1
-0.5
-2
-1
Figure 6. The mapping T : what it does to the new basis set V
Example #1:
S defined by S (ui ) = vi , i.e., i’th basis element → i’th e/vector
1 0
MtxV,U (S ) =
.
0
1
i
T defined by T (v ) = Avi = λi vi , i.e., takes e/v’s to their images
3 0
MtxW,V (T ) =
.
0
1
T ◦ S takes each ui to λi vi .
3 0
MtxW,U (T ◦ S ) =
.
0
1
Example #2:
1
X is the space of 2nd order polynomials on R, i.e.,
x : R → R ∈ X if for all θ ∈ R, x (θ) = α0 + α1 θ + α2 θ2 , for some
α0 , α1 , α2 ∈ R. Let U = {u1 , u2 , u3 } = {1, θ, θ2 }.
2
3
Y is the space of 1st order polynomials on R, i.e.,
y (θ) = α0 + α1 θ. Let V = {v1 , v2 } = {1, θ}.
Z is the space of zero’th order polynomials on R, i.e., z (θ) = α0 .
Let W = {w1 } = {1}.
x0
1
0
MtxW,V (T ) = 0
1 .
4
S ∈ L(X , Y ): S (x ) =
=
5
T ∈ L(Y , Z ): T (y ) = y 0 =
dx (θ)
.
dθ
6
T ◦ S ∈ L(X , Z ): (T ◦ S )(x ) = x 00 =
MtxW,U (T ) = 0
0
0
MtxV,U (S ) =
0
dx (θ)
.
dθ
d 2 x (θ)
.
d θ2
2 = MtxW,V (T ) · MtxV,U (S )
0
.
2