Signal processing methods for drift compensation
advertisement

2nd NOSE II Workshop
Linköping, 18 - 21 May 2003
Signal processing methods
for drift compensation
Ricardo Gutierrez-Osuna
Department of Computer Science
Texas A&M University
Outline
Sources of "drift"
Compensation approaches
Univariate methods
Multivariate methods
Discussion
This material is based upon work supported
by the National Science Foundation under
CAREER Grant No. 9984426 / 0229598
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 2 -
Texas A&M University
What is drift?
"A gradual change in any
quantitative characteristic
that is supposed to remain
constant"
[Holmberg and Artursson, 2003],
and references therein
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 3 -
Texas A&M University
Sources of "drift"
True drift
• Aging
• Poisoning
(reorganization of sensing layer)
(irreversible binding)
Experimental noise
•
•
•
•
•
•
Short-term drift
(warm-up, thermal trends)
Memory effects (hysteresis, sampling sequence)
Environmental
(pressure, temp., seasonal)
Odor delivery (flow rate, outgass, condensation)
Matrix effects
(background, humidity)
Sample degradation
(oxidation, decarbonation)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 4 -
Texas A&M University
Approaches for drift compensation
Drift-free sensors
• Duh!
Reference sensors
• Differential or ratiometric measurements [Choi et al., 1985]
Excitation
• Temperature modulation [Roth et al., 1996]
Frequent re-calibration
• Unavoidable
Careful experimental design
• Avoid systematic errors
Feature extraction
• Transient response analysis [Wilson and DeWeerth, 1995]
Signal processing
• The focus of this tutorial
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 5 -
Texas A&M University
Signal processing for drift compensation
Univariate
• Compensation applied to each sensor independently
•
•
•
•
Frequency analysis
Baseline manipulation
Differential measurements (w/ calibrant)
Multiplicative correction (w/ calibrant)
Multivariate
• Compensation applied to the response across sensors
•
•
•
•
Adaptive clustering
System identification
Calibration transfer (w/ calibrant)
Orthogonal signal correction and deflation (w/ calibrant)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 6 -
Texas A&M University
2nd NOSE II Workshop
Linköping, 18 - 21 May 2003
Univariate Techniques
Frequency analysis
Drift, noise and odor information occur at
different time scales [Artursson et al., 2000]
• Noise = high frequencies
• Drift = low frequencies
• Perform separation in the frequency domain
• Filter banks [Davide et al., 1996]
• Discrete Wavelet Transform
• Drawbacks
• Requires long-term time series to be collected
• Time series has "gaps“, variable sampling rates
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 8 -
Texas A&M University
Baseline manipulation (1)
Basics
• The simplest form of drift compensation
• “Remove" the sensor response in the recovery
cycle prior to sample delivery
• Also used for pre-processing [Gardner and Bartlett, 1999]
• A local technique, processes one "sniff" at a time
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 9 -
Texas A&M University
Baseline manipulation (2)
Differential
• Corrects additive δA or baseline drift
xˆ s (t) = y s (t) - y s (0) = (x s (t) + δ A ) − (x s (0) + δ A ) = x s (t) − x s (0)
{
{
measured
response
ideal
response
(w/o drift)
y(t)
x(t)
t=0
t=0
t=0
time
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 10 -
Texas A&M University
Baseline manipulation (3)
Relative
• Corrects multiplicative (1+δM) or sensitivity drift
xˆ s (t) =
y s (t) x s (t) (1+ δM ) x s (t)
=
=
y s (0) x s (0) (1+ δM ) x s (0)
y(t)
x(t)
t=0
t=0
t=0
time
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 11 -
Texas A&M University
Baseline manipulation (4)
Fractional
• Percentual change in the sensor response
x s (t) - x s (0)
y s (t) =
x s (0)
• Properties
• Yields a dimensionless measurement
• Normalizes sensor responses, but can amplify noisy
channels
• Fractional conductance shown to be the most
suitable method for MOS sensors [Gardner, 1991]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 12 -
Texas A&M University
Reference gas [Fryder et al., 1995]
Equivalent to diff. BM, except a calibrant is used
• Calibrant must be chemically stable over time AND
highly correlated with samples [Haugen et al., 2000]
y(t)
Sample
Calibrant
x(t)
New
baseline
time
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 13 -
Texas A&M University
Calibration schedule
Calibrant
Samples
Traditional
(time intensive)
Efficient
(systematic memory errors)
Efficient
(random memory errors)
Time, €
adapted from [Salit and Turk, 1998]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 14 -
Texas A&M University
Multiplicative correction [Haugen et al., 2000]
Basic idea
• Model temporal variations in a calibration gas with
a multiplicative correction factor
• Apply the same correction to the samples
• Perform this process first on short-term trends,
then on long-term fluctuations
Properties
• Heuristic, global technique
• Practical for industrial applications
• Compensates for short- and long-term drift
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 15 -
Texas A&M University
Short-term correction (1)
U
STC
Sequence 1
Sequence 2
Sequence 3
index
Sequence 1
Sequence 2
Sequence 3
index
USCT
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 16 -
Texas A&M University
Short-term correction (2)
For each sequence
• Compute a correction factor for
each calibration sample
qn,seq =
U1,calseq
Un,calseq
• Build regression model for
series {q1,seq, q6,seq, q11,seq,…}
qˆ n,seq = ax n + b
with x n = mod(n,Nsam + 1)
• Correct all samples
ˆ
USTC
n,seq = Un,seq qn,seq
Name
U1cal
U2
q6,seq U3
U4
U5
U6cal
q̂9,seq
U7
U8
U9
U10
U11cal
U12
U13
U14
U15
…
Class
Index xn
Calibration
1
0
Sample
2
0
Sample
3
0
Sample
4
0
Sample
5
0
Calibration
6
1
Sample
7
1
Sample
8
1
Sample
9
1
Sample
10
1
Calibration
11
2
Sample
12
2
Sample
13
2
Sample
14
2
Sample
15
2
…
…
…
(seq subindex omitted for clarity)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 17 -
Texas A&M University
Long-term correction (1)
USCT
LTC
Sequence 1
Sequence 2
Sequence 3
index
Sequence 1
Sequence 2
Sequence 3
index
ULTC
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 18 -
Texas A&M University
Long-term correction (2)
For each sequence
• Compute a correction factor for
the first calibration sample
fseq
cal
1,1
cal
1,seq
U
=
U
• Correct all samples
ˆ
ULTC
n,seq = Un,seq qn,seq fseq
14243
USTC
n,seq
Name
U1,1cal
U2,1
U3,1
…
cal
f2 U6,1
U7,1
U8,1
…
U1,2cal
U2,2
f3
U3,2
…
U6,2cal
U7,2
U8,2
…
U1,3cal
U2,3
U3,3
…
U6,3cal
U7,3
U8,3
…
Class
Index
Calibration
1
Sample
2
Sample
3
xn
0
0
0
Calibration
Sample
Sample
6
7
8
1
1
1
Calibration
Sample
Sample
1
2
3
0
0
0
Calibration
Sample
Sample
…
Calibration
Sample
Sample
6
7
8
…
1
2
3
1
1
1
…
0
0
0
Calibration
Sample
Sample
…
6
7
8
…
1
1
1
…
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 19 -
Texas A&M University
Seq
1
1
1
1
1
1
1
2
2
2
2
2
2
2
3
3
3
3
3
3
3
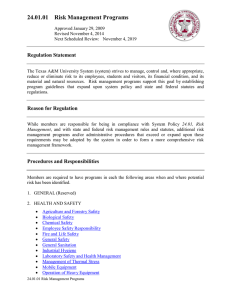
Performance of multiplicative correction
PCA plot of uncorrected milk samples measured over
2 days: pasteurized milk ({) , oxidized pasteurized
milk (), calibration samples (U).
PCA plot of drift corrected milk samples measured
over 2 days: reference milk ({), oxidized milk (),
calibration samples (U).
from [Haugen et al., 2000]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 20 -
Texas A&M University
2nd NOSE II Workshop
Linköping, 18 - 21 May 2003
Multivariate Techniques
Adaptive clustering
Basic idea
• Model the distribution of examples with a
codebook
• Assign an incoming (unknown) sample to the
"closest" class
• Adapt class parameters to incorporate information
from the newly classified example
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 22 -
Texas A&M University
Adaptive clustering (1)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 23 -
Texas A&M University
Adaptive clustering (2)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 24 -
Texas A&M University
Adaptive clustering (3)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 25 -
Texas A&M University
Adaptive clustering (4)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 26 -
Texas A&M University
Adaptive clustering (5)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 27 -
Texas A&M University
Adaptive clustering (6)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 28 -
Texas A&M University
Adaptive clustering (7)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 29 -
Texas A&M University
Adaptive clustering (8)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 30 -
Texas A&M University
Adaptive clustering (9)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 31 -
Texas A&M University
Adaptive clustering (10)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 32 -
Texas A&M University
Adaptive clustering (11)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 33 -
Texas A&M University
Adaptive clustering (12)
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 34 -
Texas A&M University
Adaptive clustering methods
Mean updating
• One cluster center per class [Holmberg et al., 1996]
Kohonen self-organizing maps
• One SOM common to all classes [Davide et al., 1994;
Marco et al., 1997]
• A separate SOM for each class [Distante et al., 2002]
Adaptive Resonance Theory
• ART is slightly different; new clusters can be created
[Gardner et al., 1996]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 35 -
Texas A&M University
Adaptive clustering: discussion
Algorithm relies on correct classification
• Miss-classifications will eventually cause the
model to lose track of the class patterns
All odors need to be sampled frequently to
prevent their patterns to drift too far
This problem has also been addressed in the
machine learning literature
• see [Freund and Mansour, 1997] and refs. therein
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 36 -
Texas A&M University
System identification [Holmberg et al., 1996]
Basic idea
• Chemical sensor responses co-vary over time
• This "common-mode" behavior can be modeled
with a dynamic model (e.g., ARMAX)
A
S
C
B
k − n) = ∑∑ b y (k − n) + ∑ c e(k − n)
∑ a y14(2
1
424
3
1
424
3
4
3
n =0
n
s
sensor s
i=1 n = 0
i≠ s
in
i
all other
sensors
n =0
n
white noise
• where ys(k) is the response of sensor 's' at time k, and
yi(k) is the response from all other sensors
• Model parameters {A,B,C} may be adapted over time
with a recursive least-squares procedure [Holmberg et
al., 1997]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 37 -
Texas A&M University
System identification: classification
Each odor/sensor pair has a unique dynamic
behavior that can be used as a fingerprint
• Build a dynamic model for each sensor/odor
• When an unknown odor is presented, predict its
behavior of each sensor with each of the models
• The method requires that multiple (consecutive)
samples of the unknown odor be collected
• The model with lowest prediction error
corresponds to the true odor
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 38 -
Texas A&M University
System identification: illustration
MODEL DYNAMIC BEHAVIOR
FOR EACH ODOR/SENSOR
APPLY EACH O/S MODEL
TO UNKNOWN SAMPLE
CHOOSE ODOR MODEL
WITH LOWEST ERROR
Unknown
ERROR 1
Unknown
ERROR 2
Unknown
Odor A
A1Y=B1Y’+C1E
ERROR 3
Odor B
A2Y=B2Y’+C2E
Odor C
A3Y=B3Y’+C3E
time
time
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 39 -
Texas A&M University
Calibration transfer
Learn a regression mapping (e.g., MLPs, PLS)
from drifting calibrant samples onto a baseline t0
• MLPs for PyMS [Goodacre and Kell, 1996]
• PLS for e-noses [Tomic et al., 2002]
• MLPs for e-noses [Balaban et al., 2000]
Training phase:
Drifting calibrant samples
at times t1, t2, …tN
Training phase:
Baseline calibrant sample
at time t0
Recall phase:
Drifting odor samples
at times t1, t2, …tN
Recall phase:
Corrected odor samples
at times t1, t2, …tN
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 40 -
Texas A&M University
Orthogonal signal correction [Wold et al., 1998]
Basic idea
• Assume dataset matrices
• Y: sensor-array data (independent variables)
• C: concentration vector or class label (dependent)
• Subtract from Y factors that account for as much
of the variance in Y as possible AND are
orthogonal to C
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 41 -
Texas A&M University
Orthogonal signal correction: intuition
Y3
Direction orthogonal
to concentration vector
Y1
Subspace correlated with
concentration vector C
Y2
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 42 -
Texas A&M University
Orthogonal signal correction: an example
6
4
2
PCA2
0
-2
-4
-6
-8
2
3
4 4 3 2222
odors
3
4
2
4
4
4
2
3
2
42
2
4423242224
4
3
4
3
3
4
2
3
4
1 11
3
3
1
22
111
4333233 222
3
4 422433233442 22
11 11 1
433
5
55 5 1 1 111
32 34 23 3 324
55 5 5 51 1 1
424 2
34
14
2343
5
5
5
5
1
5
1
55
1
51
4 3 4 4
5 5 55 11111
3
3
234
4342 4
55 5
4
1
1
3
1
2
1
1
4
5
5
2
5
3
3
3
5
322
1
55 5 1
24 2
5
3
5
4
1
5 5
55
4
5
1
5
5
3 2
5
3
11
5 1
drift
1
-10
-10
-5
0
1
5
10
15
PCA1
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 43 -
Texas A&M University
Component correction [Artursson et al., 2000]
Basic idea
• Drift is associated with the principal components
of variance in a calibration gas
• These directions are removed from the
multivariate sensor response by means of a
bilinear transformation
Algorithm
T
x corrected = x − (x ⋅ v cal )v cal
• where vcal is the first eigenvector of the calibration data xcal
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 44 -
Texas A&M University
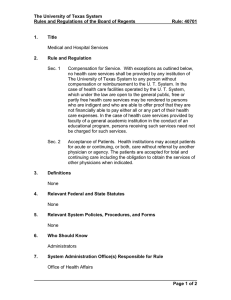
Component correction results
from [Art, 2000]
PCA scatter plot of uncorrected samples for eight gas
mixtures. Arrows indicate the direction of drift. The
center cluster (+) is the calibration gas.
PCA scatter plot after component correction. The
calibration gas (+), no longer shown in the figure, has
been used to estimate and remove the principal
direction of drift (vcal).
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 45 -
Texas A&M University
Component correction results (2)
3
2
4
3
3
4
4
4
3
3
2 4
523 4
555 8
2
6
5
1516
1
1
616
61
1
PCA2
0
-1
2
2
2
1
777 7 7
-4
-4
Rioja Joven 2000
Rioja Crianza 1999
Rioja Reserva 1998
Ribera Joven 2000
Ribera Crianza 1999
Ribera Reserva 1998
Water
12% v/v EtOH/Water
3
444
4
3 34 4
3 3
3
3
0
-3
-6
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
3
8
8
-2
7
777
4
-2
0
PCA1
2
4
6
2 2
666
61 5 55 5 2
22
1161
1
66 55 5
-1
8
8
-5
-4
-3
-2
-1
0
1
PCA1
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 46 -
Texas A&M University
2
2
2
3
4
Component deflation [Gutierrez, 2000]
Basic idea
• Identify variables 'x' whose variance can be attributed to
drift or interferents
• E.g., response to a wash/reference gas, time stamps,
temperature, pressure, humidity, etc.
• Measure 'y', the sensor-array response to an odor
• Remove variance in 'y' that can be explained by 'x' (by
means of regression/deflation)
Related to target rotation [Esbensen et al., 1987]
• "…removal of undesired information provided that there
are variables uniquely connected to that information"
[Christie, 1996]
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 47 -
Texas A&M University
Component deflation algorithm
Find linear projections x’=Ax and y’=By that are maximally correlated
{A,B} = argmax[ρ(Ax,By )]
• How? Canonical Correlation Analysis (CCA) or PLS
• Interpretation: x’ and y’ are low-dimensional projections that summarize
the linear dependencies between x and y
Find regression model ypred=Wy’
W = argmin y − Wy'
2
• Interpretation: ypred contains the variance in the odor vector y that
can be explained by y’ and, as a result of the CCA stage, by x
Deflate y and use the residual z as a corrected sensor response
z = y − y pred = y − WBy
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 48 -
Texas A&M University
Component deflation: interpretation
x3
Ax
x2
x1
B
W
z=y
y
WBy
By
class1
class3
z2
y2
class2
z1
y1
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 49 -
Texas A&M University
Component deflation: motivation
Exploit transient information in wash/reference cycle
• To capture temporal trends, augment vector x with the time
stamp of each sample (also in [Artursson et al., 2000])
Sensor response (V)
Wash
Reference
Odour
3
2.5
2
1.5
50
WTS Kernels
100
xW
150
xR
200
250
Time (s)
y
x
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 50 -
Texas A&M University
Component deflation performance
Database
• Three months of data collection
• Four cooking spices
• Twenty four days
• Four samples per day and spice
• Ten metal-oxide sensors
Class 1
Class 2
Class 3
Class 4
Date
Date
PLS
CCA
Plot shows one particular
transient feature
• Examples are sorted
RAW
• By odor class
• Within a class, by date
Date
Date
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 51 -
Texas A&M University
Influence of aging and training set size
Training set
Day: 1 2
i
Test set
j
k
W
Width=1
Predictive accuracy
1
M
D
Width=5
Width=10
0.9
CCA
0.8
PLS
0.7
RAW
0.6
0.5
2
4
6
Distance
8
10
2
4
6
Distance
8
10
2
4
6
Distance
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 52 -
Texas A&M University
8
10
Discussion of univariate methods
Frequency decomposition
• Mostly useful for diagnostics and analysis
Baseline manipulation
• Attractive for its simplicity, but not an effective driftcorrection approach for chemical sensors
Differential measurements wrt calibrant
• First-order approximation, but does not exploit crosscorrelations
Multiplicative correction wrt calibrant
• Empirically shown to work, heuristic, does not exploit
cross-correlations
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 53 -
Texas A&M University
Discussion of multivariate methods (1)
Adaptive clustering
• Requires equiprobable and frequent sampling
• Correct identification is essential to ensure that the
adapting distributions track the odors
• Does not use information from a calibrant
System identification
• Builds a separate drift model for each odor, but
requires multiple consecutive samples
• Can be used as a template-matching classifier
• Does not use information from a calibrant
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 54 -
Texas A&M University
Discussion of multivariate methods (2)
Calibration transfer
• Shown to work in MS and e-nose data
• Black-box approach
Orthogonal Signal Correction and Deflation
• In my experience, the best approach
• Why? Time tested in chemometrics, uses multivariate
and calibrant information, and IT IS SIMPLE
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 55 -
Texas A&M University
References (1)
M. Holmberg and T. Artursson, "Drift Compensation, Standards and Calibration Methods," in T. C.
Pearce, S. S. Schiffman, H. T. Nagle and J. W. Gardner (Eds.), Handbook of Machine Olfaction:
Electronic Nose Technology, Weinheim, Germany: Wiley-VCH, 2002, pp.325-346.
S.-Y. Choi, K. Takahashi, M. Esani and T. Matsuo, "Stability and sensitivity of MISFET hydrogen
sensors," in Proc. Int. Conf. Solid State Sensors and Actuators, Philadelphia, PA, 1985.
M. Roth, R. Hartinger, R. Faul and H.-E. Endres, "Drift reduction of organic coated gas-sensors by
temperature modulation," Sensors and Actuators B 36(1-3), pp. 358-362, 1996.
D.M. Wilson and S.P. DeWeerth, "Odor discrimination using steady-state and transient
characteristics of tin-oxide sensors," Sensors and Actuators B 28(2), pp. 123-128. 1995.
J.W. Gardner and P.N. Bartlett, Electronic Noses. Principles and Applications, New York: Oxford
University Press, 1999.
J.W. Gadner, "Detection of Vapours and Odours from a Multisensor Array using Pattern
recognition. Part 1. Principal Components and Cluster Analysis," in Sensors and Actuators B 4, pp.
109-115, 1991.
M. Fryder, M. Holmberg, F. Winquist and I. Lündstrom, "A calibration technique for an electronic
nose," in Eurosensors IX, 1995, pp. 683-686.
M.L. Salit and G.C Turk, "A Drift Correction Procedure," Analytical Chemistry 70(15), pp. 31843190, 1998.
J.E. Haugen, O. Tomic and K. Kvaal, "A calibration method for handling the temporal drift of solidstate gas sensors," Analytica Chimica Acta 407, pp. 23-39, 2000.
T. Artursson, T. Eklöv, I. Lundström, P. Mårtensson, M. Sjöström and M. Holmberg, "Drift
correction for gas sensors using multivariate methods," Journal of Chemometrics 14(5-6), pp. 711723, 2000.
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 56 -
Texas A&M University
References (2)
F.A.M. Davide, C. Di Natale, M. Holmberg and F. Winquist, "Frequency Analysis of Drift in Chemical
Sensors," in Proc. 1st Italian Conf. on Sensors and Microsystems, Rome, Italy, 1996, pp. 150-154.
R. Goodacre and D.B. Kell, "Correction of mass spectral drift using artificial neural networks,"
Analytical Chemistry 68, pp. 271-280, 1996.
O. Tomic, H. Ulmer and J.E. Haugen, "Standardization methods for handling instrument related
signal shifts in gas-sensor array measurement data," Analytica Chimica Acta 472, 99-111, 2002.
M.O. Balaban, F. Korel, A.Z. Odabasi and G. Folkes, "Transportability of data between electronic
noses: mathematical methods," Sensors and Actuators B 71, pp. 203-211, 2000.
S. Wold, H. Antti, F. Lindgren and J. Öhman, "Orthogonal signal correction of near-infrared
spectra," Chemometrics and Intelligent Laboratory Systems 44, pp. 175-185, 1998.
K. Esbensen, L. Lindqvist, I. Lundholm, D. Nisca and S. Wold, "Multivariate Modeling of
Geochemical and Geophysical Data," Chemometrics and Intelligent Laboratory Systems 2, pp. 161175, 1987.
O.H.J. Christie, “Data Laundering by Target Rotation in Chemistry-Based Oil Exploration,” Journal
of Chemometrics 10, pp. 453-461, 1996.
M. Holmberg, F. Winquist, I. Lundström, F. Davide, C. DiNatale, and A. D'Amico, "Drift
counteraction for an electronic nose," Sensors and Actuators B 36(1-3), pp. 528-535, 1996.
F.M. Davide, C. Di Natale, and A. D’Amico, "Self-organizing Multisensor Systems for Odour
Classification: Internal Categorization, Adaptation, and Drift Rejection," Sensors and Actuators B
18-19, pp. 244-250, 1994.
S. Marco, A. Pardo, A. Ortega and J. Samitier, "Gas Identification with Tin Oxide Sensor Array and
Self-Organizing Maps: Adaptive Correction of Sensor Drifts," in Proc. IEEE Instrumentation and
Measurement Technology Conference, Orrawa, Canada, May 19-21, 1997, pp. 904-907.
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 57 -
Texas A&M University
References (3)
C. Distante, P. Siciliano and K.C. Persaud, "Dynamic Cluster Recognition with Multiple SelfOrganising Maps," Pattern Analysis and Applications 5, pp. 306-315, 2002.
J. W. Gardner, E. L. Hines and C. Pang, "Detection of vapours and odours from a multisensor array
using pattern recognition: self-organizing Adaptive Resonance Techniques,” Measurement +
Control 29, pp. 172-178, 1996.
Y. Freund and Y. Mansour, “Learning under persistent drift,” in Proc. European Conference on
Computational Learning Theory, 1997, pp. 109-118.
2nd Workshop
Ricardo Gutierrez-Osuna
Signal processing methods for drift compensation - 58 -
Texas A&M University
2nd NOSE II Workshop
Linköping, 18 - 21 May 2003
Questions
2nd NOSE II Workshop
Linköping, 18 - 21 May 2003
Thank you