Stability Improvement Using TCSC in Radial Power Systems
advertisement

NAPS-2000, Waterloo, ON, October 2000
Stability Improvement Using TCSC in Radial Power Systems
Alberto Del Rossoy Claudio A. Ca~nizares Victor Quintana
University of Waterloo
Department of Electrical & Computer Engineering
Waterloo, ON, Canada N2L 3G1
c.canizares@ece.uwaterloo.ca
Abstract|This paper examines the use of Thyristor Controlled Series Capacitors (TCSC) for stability
improvement of power systems. An appropriate TCSC
model for angle stability studies is used to design a simple controller based primarily on the dynamic response
of the system. An analysis of dierent locally measurable controller input signals is conducted by means of
linear systems techniques, for both pre-fault and postfault system congurations, as well as time domain
simulations involving large disturbances; limitations of
control laws based upon linearized system models are
then discussed for this particular problem. A simplied
model of the Argentinean high voltage interconnected
system is used to illustrate the concepts presented in
the paper.
Keywords: Stability limits, radial power systems, transient stability, FACTS, TCSC, controller design.
I. Introduction
In radial power systems, large amounts of power are
transmitted from low cost power stations (hydro, gas) to
major load centers over long transmission lines. Power systems with these features are commonly found in geographically broad countries with low population density, such as
Argentina and other South American countries. In these
systems, stability problems are a major issue due to the
fact that system disturbances on the interconnecting lines
easily lead to loss of synchronism or sustained oscillations
[1]. Radial type systems are also rather susceptible of voltage stability problems, especially in a liberalized electricity
market environment on which systems are being operated
under increasingly stressed conditions.
Dynamic security assessment, i.e., the evaluation of the
power system ability to withstand a set of severe disturbances, surviving the transient perturbation to recover acceptable steady-state conditions [2], is an essential task for
secure operation of power systems. To ensure that a system
remains dynamically secure, preventive and/or corrective
remedial actions must be designed. Preventive actions are
applied in the pre-contingency system, i.e., prior to any
disturbance, so that after any \credible" contingency, the
system remains stable. Examples of these types of actions
include restrictions on interface ows, generation active
power re-dispatch and voltage rescheduling. Typically, reduction of interface power ow limits, i.e., reducing the
available transfer capability (ATC) of the system, is the
most common preventive action taken by operators, thus
forcing expensive energy to be produced near load centers
and hence increasing operation costs for the whole system.
The ATC calculation basically consists on determining the
stability limits of a system for a given load pattern by
nding the maximum power that can be transferred across
an interface such that, if credible contingencies actually
occur, the system will not lose stability [3]. Corrective
y Visiting Scholar from the Universidad Nacional de San Juan,
Instituto de Energa Electrica, Argentina.
Victor Do~na
Universidad Nacional de San Juan
Instituto de Energa Electrica
Argentina
remedial actions, on the other hand, are major actions
taken immediately after a disturbance, such as tripping,
load rejection, break resistors, fast-valving, capacitor bank
or reactor switching, etc.
More recently, Flexible AC Transmission System
(FACTS) controllers are giving grid planners and operators a greater exibility regarding the type of preventive
and corrective actions that can be taken on a power system [4]. The use of FACTS Controlled Series Compensators, particularly Thyristor Controlled Series Capacitors
(TCSC), for stability enhancement has been widely studied and reported in various papers and technical reports
(e.g., [1]). In radial power systems, the installation of Controlled Series Compensators in the main transmission corridors might result in a cost eective measure to increase
stability limits. Hence, the aim of this paper is to analyze
the design a proper TCSC controller based on small-signal
and transient stability analysis so that transfer capability
limits can be increased.
Dierent control techniques have been applied to TCSC
control design, so that power system oscillations can be
damped to improve system dynamic response. In [5],
modal sensitivities and residue methods are used to determine the TCSC location, feedback signals and control
design; the proposed method is applied to a 3-area, 6machines test systems for illustration purposes. Authors
in [6] propose an output feedback damping controller for
a TCSC in meshed multi-machine power systems; a 9-bus,
3-machine system is used to demonstrate the proposed approach. In [7, 8, 9], dierent control laws for damping
power system oscillations are derived based on transient
energy function methods. In all of these papers, simplied
models of the TCSC and small test systems are used to
test the performance of the proposed control strategies.
In the present paper, a linear dynamic compensator is
proposed for damping control using a more accurate model
of the TCSC as proposed in [10, 11]. Since transient stability improvement is of major concern here, tuning of
the control parameters is carried out mainly via simulation of severe fault conditions. Furthermore, studies are
conducted in a realistic 89-bus, 72-machine radial system
model of the Argentinean power grid.
The paper is structured as follows: Section II describes
the TCSC model suitable for time domain simulations and
stability analysis used in this paper. The design of the
TCSC controller for stability improvement and the proper
selection of the feedback signals are discussed in Section
III. In Section IV, the test system model of the Argentinean power grid used for simulations is described; a brief
description of the analysis tools used in this work is also
presented in this section. The performance of the TCSC
and the proposed controller design for stability enhancement are discussed in Section V, analyzing the increase in
stability limits when the TCSC controller is used in the
proposed model. Finally, Section VI summarizes the main
contributions of this paper and suggests directions for fu-
ture research.
X’m
II. TCSC model
A typical TCSC module consists of a xed series capacitor (FC) in parallel with a thyristor controlled reactor
(TCR). The TCR is formed by a reactor in series with a
bi-directional thyristor
valve that is red with an angle ranging between 90 and 180 with respect to the capacitor
voltage [12].
The model to be adopted for any device in power systems analysis must be in accordance with the type of study
involved and the tools used for simulation. Since this work
is concerned with the application of the TCSC for stability improvement, the TCSC model used must rely in the
assumptions that are typically adopted for transient stability analysis, i.e., voltages and currents are sinusoidal,
balanced, and operate near fundamental frequency. In
[10, 11], an appropriate TCSC model suitable for voltage
and angle stability applications and power ows studies is
discussed. In that model, the equivalent impedance Xe of
the controller at fundamental frequency is represented as
a function of the ring angle , based on the assumption
of a sinusoidal steady-state total current. Thus,
k 2 ( + sin )
Xe = ;Xc 1 ; x 2
(kx ; 1)
2
2
+ 4kx cos2 (=22) (kx tan kx2 ; tan 2 )
(1)
(kx ; 1)
where = 2( ; ); kx = prx = Xc =XL ; Xc is the
capacitor nominal reactance; and XL is the inductor reactance.
The device can be continuously controlled in the capacitive or inductive regions by controlling the ring angle ;
this mode of operation is known as Vernier control mode.
It can be observed that there is a value of = r that
causes steady-state resonance, i.e., Xe = 1 in (1); this
value of r depends on the ratio rx. As the TCSC is connected in series with a transmission line, the resonant point
must be avoided to prevent damage in the controller components as well as line current interruptions. Furthermore,
operation close to the resonant point and on the inductive
region should be avoided, as there is substantial harmonic
content in the controller line current under these operating conditions [10]. Hence, the limits of the ring angle
for a TCSC operating in the capacitive region may be
dened as min 180, where min > r to prevent
parallel resonance. In this paper, only operation on the
capacitive region is considered, which is a realistic operating condition for the TCSC, given the undesirable current
harmonics produced in the inductive region; furthermore,
model (1) fails to represent the controller when operating
in this region.
Since the relationship between angle and the equivalent fundamental frequency impedance Xe is a uniquevalued function, the TCSC can be modeled, for simulation purposes, as a variable capacitive reactance within
the operating region dened by the limits imposed by
the ring angle , i.e., Xemin Xe Xemax , where
Xemin = Xe (min) and Xemax = Xe (180 ) = Xc .
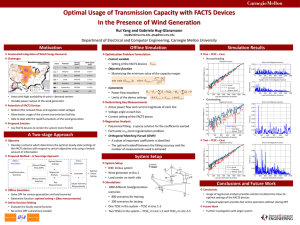
The general block diagram of the TCSC model used for
stability studies is shown in the Fig. 1. In this gure, Xm
is the stability or damping control modulation reactance
value, as determined by the control blocks. This signal is
then put through a rst order lag that represents the ring
p
max
Xe0
Input Signal
1
Xm
CONTROLLER
X’m
+
+
Xe
1 + sT
X’m
min
Fig. 1. TCSC model for stability studies.
Limiter
Input
Signal
Kc (sTw )
1 + sTw
1 + sT1
1 + sT2
1 + sT3
1 + sT4
Xm
Fig. 2. Transfer function for the TCSC controller.
control and natural response of the device; a typical value
for the TCSC lag time constant is 15 ms [13]. Xe0 is the
desired steady-state
reactance of the TCSC. The values of
the limits Xm0 max and Xm0 min are obtained from the Xe
limits, e.g., Xm0 min = Xemin ; Xe0 . Observe that for each
value of the output variable Xe , there is a corresponding
value of the angle , as for (1).
III. Controller design
Considering a radial type interconnected power system
with a TCSC installed in a tie-line forming an interconnection corridor, when the system is subjected to a severe disturbance, the controller must provide maximum
compensation level for the immediate post-fault period,
to increase synchronizing torque in order to improve rstswing stability, as well as provide proper modulation to
damp the subsequent power oscillation. In [12], a two loop
controller is proposed for stability enhancement. The rst
control loop is used for synchronization, yielding a maximum compensation level during a predened acting time;
the control is then transferred to the damping loop, which
is in charge of damping the remaining oscillations. In this
paper, a simple linear controller is proposed for stability
enhancement. It is shown below that, with a proper selection of control parameters and controller input signals
for this linear controller, it is possible to accomplish the
aforementioned control requirements.
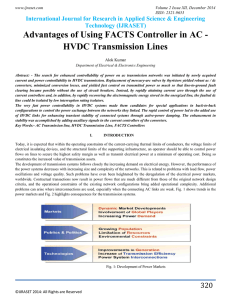
The general structure of the proposed controller is laid
out in Fig. 2. It consists of a washout lter, a dynamic
compensator and a limiter. The washout lter is mainly
provided to avoid the controller respond to the dc oset
of the input signal. The dynamic compensator consists
of two or more lead-lag blocks to provide the necessary
phase-lead characteristics. Two fundamental elements in
the controller design process, i.e., the input signal and parameter tuning, are discussed below.
A. Input Signals
The selection of the appropriate input signal is an important issue in the design of an eective and robust controller. The following are some of the main characteristics
of a proper input signal:
The input signal should preferably be locally measur-
able. This is desirable to avoid additional costs associated with communication and mainly to improve
reliability.
The oscillations modes to be damped should be \observable" in the input signal. Mode observability can
be used to select the most eective signal to damp out
the critical modes under consideration.
The selected input signal must yield correct control
action when a severe fault occurs in the system. It is
shown in [7] that when active power is used as input
signal of a pure derivative controller, the control signal
may cause negative damping eects in the presence
of disturbances involving large changes in generator
power angles.
Line active power, line reactive power, line current magnitude and bus voltage magnitude are all good candidates
to be considered in the selection of input signals for the
TCSC, when the aim of the controller design is stability
improvement. If line current magnitude is used as an input signal, in the event of severe network faults, the signal
should be kept at its initial value during the fault-on period
and then returned to the actual measurements after fault
clearance; this way, the controller receives a step input in
the immediate post-fault period, reacting by yielding the
high compensation level necessary to reduce rst-swing oscillation amplitude.
Yacyreta
Bracho
Resistencia
Rincón
Noreste
Argentino
(NEA)
Recreo
Noroeste Argentino
(NOA)
Malvinas
Litoral
Romang
Almafuerte
Embalse
Salto Grande
R. Oeste
C. Elía
V. Lía
Zárate
Centro
San
Nicolás
G. Mendoza
Cuyo
Corridor
Comahue−Gran Buenos Aires
Gran
Buenos Aires
(GBA)
Matheu
Rodriguez
Ezeiza
Abasto
Pergamino
Comahue
Buenos Aires
Henderson
Puelches
Cerrito Costa
Olavarría
Bahía Blanca
Chocón
500 kV
220 kV
Choele Choel
B. Parameter Tuning
A number of alternative techniques may be used for selection of control parameters. Some of the most popular
ones based on linear systems theory are phase and gain
margin technique, pole placement techniques based on root
locus rules, eigenvalue placement using residues, and optimal selection of control parameters using eigenvalues sensitivities. However, in real power systems, the TCSC damping eect and its control parameters can be highly nonlinear functions [14]. Such characteristics make dicult the
use of linear techniques for parameter tuning, especially
those that require eigenvalues sensitivity calculation. Furthermore, when the performance of the controller under
severe disturbances is of major concern, analysis based on
system linearizations or small signal approximations are
usually not valid. Therefore, an initial design may be carried out using any of the aforementioned linear techniques,
and then adjust the control parameters using time domain
simulations that incorporate all system nonlinearities and
limit settings.
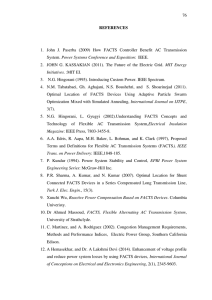
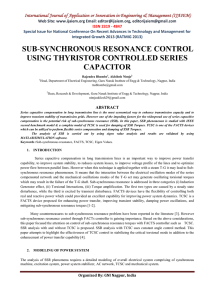
Fig. 3. Argentinean Interconnected System or SADI (500kV).
generation is composed mainly by hydro power plants and,
to a less extent, by thermal generation units using low-cost
natural gas. The main load centers are located in the Gran
Buenos Aires (GBA) and Centro (CEN) areas. Two transmission corridors of about 1100 km transmit power from
NEA and COM to GBA. In the simplied network used in
this work, only 500 kV buses and some of the 220 kV buses
are represented. The test systems consist of 89 nodes, 133
branches, including transformers, and 72 equivalent machines. Transient model are used for generators, including
exciters, voltage regulators, power systems stabilizers and
governors; \classical" machine models are used for some
of the generators. Loads are represented as constant PQ
loads. Figure 3 depicts a sketch of the Argentinean high
IV. Test System and Analysis Tools
voltage interconnection system (SADI); notice the radial
In this paper, simulations have been carried out in a nature of the grid.
simplied network model of the Argentinean high voltage
(500 kV) interconnected system (SADI). The main charThe Power System Toolbox (PST) was used here for all
acteristics of this system are as follows:
simulations, eigenvalue calculations and mode observability analyses [15]. This package is a MATLAB based power
Extensive and unmeshed HV transmission system.
system analysis toolbox that was initially developed at RPI
perform power system analysis using user-dened mod Principal low cost generation areas far from the major to
els. It has several graphical tools, namely, a voltage staload centers.
bility tool, a transient stability tool, and a small signal
The power transfer capability of interface tie-lines is stability tool. The models for TCSC and other controllers
and devices are included into the toolbox by means of userbasically dened by stability limits.
dened \modules". The original code provided with the
The principal generation areas are the Comahue (COM) program was modied to be able to implement dierent
and Noroeste Argentino (NEA) areas. In these areas, the input signals for the TCSC controller.
V. Simulations and Results
The main objective of this study is to analyze the effectiveness of TCSC controllers to improve system stability and thus increase power transfer capability limits. The transmission corridor Comahue-Gran Buenos
Aires is studied here. This corridor is mainly composed of two lines, i.e., Line-A, which is a double line
going through Cerrito Costa-Puelches-Henderson-Ezeiza,
and Line-B, which goes through Chocon-Choele ChoelBahia Blanca-Olavarria-Abasto. In the real system, both
tie-lines are series compensated with xed capacitor banks
at a compensation level of about 45%. The limits on the
maximumactive power that the corridor is able to transmit
are basically imposed by stability problems in the system.
For the purposes of this work, a TCSC is rst assumed to
be installed at the mid-point of Line-A. The characteristics
of the TCSC are as follows:
The capacitor fundamental frequency reactance (50
Hz) is Xc = ;39 .
The value of the ratio rx = Xc =XL = 10, which yields
a resonant point at r = 151:50.
The adopted ring angle limits are max = 180 and
min = 155 ; the limits of the TCSC net reactance
corresponding to these limits are then Xemax = ;39
, and Xemin = ;96:4 .
The TCSC steady-state reactance (set point) adopted
for simulations is Xe0 = ;58 , which corresponds
to
a compensation level of 44%, and an 0 = 158:6.
Simulations were conducted for dierent operation conditions corresponding to dierent power levels transmitted through the corridor for various power generation dispatch settings. The total load of the system is Pl = 11404
MW, Ql = 4800 MVAR, which was kept unchanged for all
study cases. In the base case, the total generated power is
Pg = 11820 MW, Qg = 4170 MVAR, and the active power
owing on Line-A is PA = 1742 MW, and on Line-B is
PB = 822 MW. Two severe contingencies are considered,
i.e.,
1. Fault-1: A three-phase short circuit on Line-A near
the bus Cerrito Costa, followed by a tripping of the
faulted circuit.
2. Fault-2: A three-phase short circuit on Line-B near
the bus Chocon, followed by a tripping of the line.
All stability limit calculations are based on the analysis of
these two contingencies.
A. Input Signals
The active power and the current magnitude through
the line where the TCSC is located are considered here as
possible input signals. As discussed in Section II, an appropriate feedback signal should have signicant observability
of the critical modes to be damped out. Hence, mode
observability analyses were carried out for these two signals considering dierent operating conditions [2, 6], i.e.,
for the pre-fault network and for the two post-contingency
operating states corresponding to Fault-1 and Fault-2.
Table I shows the results of the open loop eigenvalue
and mode observability analysis corresponding to an operation state in which the power generated in area Comahue is increased with respect to the base case, so that
Line
out
|
|
|
Line-A
Line-A
Line-A
Line-B
Line-B
Line-B
TABLE I
Eigenvalues and mode observability
Mode Damping Freq.
I
P.
ratio
Hz. Obs. Obs.
Int.-area 0.070 0.606 0.824 0.855
Int.-area 0.046 0.711 0.861 0.877
Int.-area 0.051 0.860 0.724 0.716
Int.-area 0.011 0.480 0.823 0.298
Int.-area 0.080 0.680 0.809 0.279
Local
0.050 0.820 0.749 0.227
Int.-area 0.009 0.501 1.457 0.601
Int.-area 0.081 0.680 1.362 0.547
Local
0.046 0.825 1.236 0.429
TABLE II
Parameters of the TCSC controller
kc Tw T1 T2 T3 T4
1.1 5 1.1 0.05 0.08 0.5
power ow over the corridor is augmented. The active
power ow in Line-A and Line-B for this condition are
PA = 1948 MW and PB = 907 MW, respectively. The
system presents three poorly damped electromechanical
modes. Modes shapes analysis shows that these modes
are inter-area modes in the pre-contingency system. It is
observed that, in the pre-fault state, observability of the
three modes from active power (P) and current magnitude (I) are signicant and their values are close to each
other. However, in the post-fault system conguration,
the observability of the modes in the current magnitude is
considerably greater than in the active power. Therefore,
one would expect that the performance of the TCSC controller when using line current as the input signal would
be better than when the active power is used, especially
in the stressed system when critical transmission lines are
tripped o as a consequence of a fault.
B. Parameter Settings
The controller parameters are given in Table II. The
adjustment of their values has been carried out via multiple
time domain simulations with the aim of improving the
transient response of the system for dierent operating and
fault conditions.
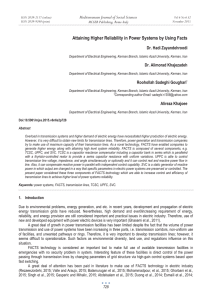
C. Simulations
1. Case I: The operating condition considered in this
case corresponds to the base case. Fault-2 is applied at
t = 0:1 s, and cleared after 100 ms.
Figure 4 shows the oscillations of the active power ow of
the line where the TCSC is installed, i.e., Line-A, for three
dierent system conditions, namely, for the system without TCSC, and for the system with TCSC with current
and active power as input control signals. The simulation
results show that the system without TCSC is rst swing
stable for this fault, but post-contingency oscillations are
not well damped. The TCSC signicantly reduces the rst
rotor angle swing and improves the damping of the subsequent power swings. It is also observed that the performance of the controller when using any of the considered
input signals is very similar in this case.
Figure 5 shows the excursions of angle, with respect to
3200
0.7
without−TCSC
IS−Current
IS−Real Power
3000
IS−Current
IS−Real Power
0.65
0.6
Xe [p.u. wrt Xline]
Power Flow [MW}
2800
2600
0.55
2400
0.5
2200
0.45
2000
0
3
6
9
12
15
0.4
Time [sec.]
0
3
6
9
12
15
Time [sec.]
Fig. 4. Power ow variations on Line-A, Case I.
Fig. 6. TCSC equivalent reactance variations, Case I.
110
without−TCSC
IS−Current
IS−Real Power
100
3600
IS−Current
IS−Real Power
90
3200
Power Flow [MW]
Machine angle [deg.]
3400
80
70
60
3000
2800
50
2600
40
2400
30
0
5
10
15
Time [sec.]
2200
Fig. 5. Excursions of machine angle, Case I.
0
3
6
9
12
15
Time [sec.]
Fig. 7. Power ow variations on Line-A, Case II.
the reference machine, of the machine that is most severely
aected by the fault. Figure 6 depicts the variations of the
TCSC fundamental frequency reactance, which correspond
to unique values of ring angle as for (1).
2. Case II: The generation in Comahue is now increased, resulting in power ows on Line-A and Line-B of
PA = 2100 MW and PB = 958 MW, respectively, which
yield a 494 MW increment on the total power transmitted
through the corridor with respect to the base case. The
same fault as in Case I is applied here, i.e., Fault-2.
In Fig. 7, the oscillations of active power ow through
Line-A, are shown, whereas in Fig. 8, the angular excursions of the most severely aected machine are depicted
for the three dierent system conditions already considered in Case I. Observe that the system without TCSC is
transiently unstable, losing synchronism in the rst swing.
When a TCSC is installed in Line-A, it stabilizes the system and damps the remaining oscillations. Notice that the
performance of the controller when current magnitude is
used as the input signal is much better than when active
power is utilized. This agrees with the results of the mode Fig. 8. Excursions of machine angle, Case II.
observability analysis previously discussed.
120
110
without TCSC
IS−Current
IS−Real Power
Machine angle [deg.]
100
90
80
70
60
0
3
6
9
Time [sec.]
12
15
2000
TABLE III
Parameters of TCSCs controllers
IS−Current
IS−Real Power
TCSC Kc Tw T1 T2 T3 T4
1
1.2 5 1.1 0.08 0.05 0.5
2
0.8 5 0.9 0.05 0.08 0.7
Power flow [MW]
1800
1600
1400
1200
1000
0
3
6
9
12
15
Time [sec.]
Fig. 9. Power ow variations on Line-A, Case III.
140
IS−Current
IS−Real Power
without TCSC
130
Machine angle [deg.]
120
110
100
90
80
70
60
50
0
3
6
9
12
15
Time [sec.]
Fig. 10. Excursions of machine angle, Case III.
3. Case III: In this case, generation in the Comahue
area is increased by 300 MW over the base case. The power
owing on the lines that form the corridor are PA = 1955
MW and PB = 908 MW. A three-fault phase is applied on
one of the circuits of Line-A near the bus Cerrito Costa,
clearing it after 100 ms by tripping o the faulted circuit
(Fault-1). Figure 9 shows the active power ows on Line
A in this case, and Fig. 10 the angular oscillations of the
most severely aected machine. The simulation results
show that when TCSC is not used, the systems is transiently unstable and losses synchronism in the rst swing.
When a TCSC is installed in Line-A (same location as in
the previous cases), it is possible to stabilize the system.
However, the eectiveness of the TCSC in damping oscillations is not as good as in Case II, due to the fact that,
when a TCSC is located in Line-A, the controllability of
the critical modes in the post-fault system corresponding
to Fault-1 are much less than the controllability for critical
modes in the post-fault system for Fault-2.
In Case II, with a TCSC installed in Line-A, if Fault-1 is
applied, the system losses synchronism in the rst swing,
which basically means that Fault-1 is more severe than
Fault-2 for these operating conditions. Therefore, Fault-1
can be considered as the most stringent condition to be
considered for the determination of the stability limits of
the corridor Comahue-Buenos Aires. After carrying out
several simulations for dierent loading conditions, it was
found that in most cases this contingency is the critical
one. Hence, to be able to improve the response of the
system and thus increase its stability limits, another TCSC
is installed in Line-B.
4. Case IV: Two TCSCs are now installed in the
system, one on Line-A (TCSC-1), as previously explained,
and a second one on Line-B (TCSC-2). The characteristics
of TCSC-2 are as follows:
The capacitor fundamental frequency reactance (50
Hz) is assumed to be Xc = ;97 .
The value of rx = Xc =XL = 10, which yields a resonant point at r = 151:5 ; hence, the adopted
ring
angle limits are max = 180 and min = 155, which
yield Xemax = ;97 and Xemin = ;239 .
The TCSC steady-state reactance (set point) adopted
for simulations is Xe0 = ;130 , which corresponds
to a 40% compensation level and a ring angle 0 =
160 .
The parameters of the controllers for both TCSC are shown
in Table III. The current magnitude is used as the input
signal for both controllers.
The operating conditions are the same as in Case II,
i.e., the real power ow on Line-A is PA = 2100 MW, and
on Line-B PB = 958 MW, for a total power owing over
the corridor of 3058 MW. A three-phase fault is applied
on Line-A near the bus Cerrito Costa at t = 0:1 s, and
then cleared by disconnecting the faulted circuit at t =
0:2 s (Fault-1). Figures 11, 12 and 13 depict the main
simulation results. As indicated before, if the TCSC in
Line-B were not installed, the system would be unstable
when subjected to this contingency. It is important to
point out that when the two TCSCs are installed in the
system, the most stringent contingency for stability limit
calculations is not Fault -1, as in the previous case, but
rather Fault-2.
Table IV shows the stability limits obtained for the
corridor Comahue-Buenos Aires, for three dierent cases,
namely, for the system without TCSC, with one TCSC
in Line-A, and two TCSCs on both lines of the corridor.
As expected, the maximum power that can be transmitted though the corridor, considering the most severe contingency for the system, signicantly increases with the
insertion of TCSCs.
VI. Conclusions
The eectiveness of TCSC controllers for improving system stability is clearly demonstrated in this paper. As a
direct consequence of the stability enhancement achieved
by TCSC utilization, the paper shows how transfer capability limits can be considerably augmented, thus signi-
TABLE IV
Stability limits for corridor Comahue-Buenos Aires
2200
Case
Power Flow limit Increase
[MW]
%
without TCSC
2620
{
TCSC-1
2962
13
TCSC-1 and TCSC-2
3500
33.6
2000
1800
Power Flow [MW]
Power Flow − Line A
1600
Power Flow − Line B
1400
1200
1000
800
600
0
3
6
9
12
15
18
Time [sec.]
Fig. 11. Power ow variations on Line-A and Line-B, Case IV.
140
without TCSC
130
Machine angle [deg.]
120
110
with two TCSCs
100
90
80
0
3
6
9
Time [sec.]
12
15
18
Fig. 12. Excursions of machine angle, Case IV.
cantly aecting the types of power transactions that can
take place on the test system.
In this paper, a real radial type power system is used
to illustrate the increase in the stability limits of a main
transmission corridor that can be achieved when TCSCs
are properly located and controlled. An adequate model
for representing TCSCs in stability studies is used, so that
the relationship between the thyristor ring angles and
the fundamental frequency impedance of the TCSC can
be accurately represented, and thus properly represent the
actual limits on the ring angle imposed by design considerations. Steady state and dynamic limits on voltages and
currents can also be handled by this model.
A detailed discussion regarding the fundamental aspects
of proper controller design for TCSCs is provided. The
limitations of using linear control techniques for control
parameters setting when large disturbances are to be considered are also highlighted in this paper.
Performance indices, which do not rely upon system linearization or small signal approximations, should be developed to properly account the TCSC stabilization and
damping eects and for optimal tuning of control parameters. Also, special techniques for control coordination
should be used when more than one TCSC are utilized in
the system. Finally, comparative studies should be performed of the eects, control and design of using dierent
series FACTS controllers in power system models of real
networks. The authors are currently pursuing research
work on all these aspects of FACTS control and design,
with particular emphasis on determining the eect of these
devices on power transactions in realistic power system
models.
[1]
0.7
[2]
0.6
[3]
0.55
[4]
Xe [p.u. wrt X
line
]
0.65
0.5
[5]
Xe of TCSC Line A
0.45
[6]
Xe of TCSC Line B
0.4
0.35
0
3
6
9
Time [sec.]
12
15
Fig. 13. TCSC-1 and TCSC-2 reactance variations, Case IV.
18
[7]
References
C. Gama and R. Tenorio, \Improvements for Power System Performance: Modeling, Analysis and Benets of TCSCs," Proc.
IEEE/PES Winter Meeting, Singapore, January 2000.
P. Kundur, \Power Systems Stability and Control," EPRI,
McGraw-Hill, 1994.
NERC, \Available Transfer Capability Denitions and Determination," USA, 1996.
N. G. Hingorani, \Flexible AC Transmission Systems," IEEE
Spectrum, April 1993, pp. 40{45.
N. Yang, Q. Liu, and J. McCalley, \TCSC Controller Design for
Interarea Oscillations," IEEE Trans. Power Systems, Vol. 13,
No. 4, November 1998, pp. 1304-1309.
X. Chen, N. Pahalawaththa, U. Annakkage, and C. Kumbe,
\Output feedback TCSC controllers to improve damping of
mesehed multi-machine power systems," IEE Proc. Transm.
Distrib., Vol. 44, No. 3, May 1997, pp. 243-248.
J. Machowski, S. Robak, and J. Bialek \Damping of Power
Swings by Optimal Control of Series Compensators," 10th International Conference on Power System Automation ans Control,
Bled, Slovenia, October 1997.
[8] J. Gronquist, W. Sethares, F. Alvarado, and R. Lassester,
\Power Oscillations Damping Control Strategies for FACTS
Devices Using Locally Measurable Quantities," IEEE Trans.
Power Systems, Vol. 10, No. 3, August 1995, pp. 1598-1605.
[9] M. Noroozian, A. Wilk-Wilcznski, P. Halavarsson, and K.
Niklasson, \Control Strategy fot Damping of Power Swings Using TCSC," 6th Symposium of Specialists in Electric and Expansion Planning (VI SEPOPE), 1998, Brazil.
[10] C. A. Ca~nizares and Z. T. Faur, \ Analysis of SVC and TCSC
Controllers in Voltage Collapse ," IEEE Trans. Power Systems,
Vol. 14, No. 1, Frebruary 1999, pp. 158-165.
[11] C. Ca~nizares, S. Corsi, and M. Pozzi, \Modeling and Implementation of TCR and VSI Based FACTS COntrollers," ATUCR no.
99/595, ENEL-Ricerca, Area Trasmissione e Dispacciamento,
December 1999.
[12] CIGRE Working Group 14.18, \Thyristor Controlled Series
Compensation," December, 1997.
[13] J. Paserba, N. Miller, E. Larsen, and R. Piwko, \A Thyristor
Controlled Series Compensation Model for Power System Stability Analysis," IEEE Trans. Power Systems, Vol. 10, No. 4,
November 1995, pp. 1471-1478.
[14] P. Dolan, J. Smith, and W. Mittelstadt, \A Study of TCSC
Optimal Damping Control Parameters for Dierent Operating
Conditions," IEEE Trans. Power Systems, Vol. 10, No. 3, July
1995, pp. 1972-1978.
[15] \Power System Toolbox Ver. 2.0: Dynamic Tutorial and Functions," Cherry Tree ScienticSoftware, Colborne, Ontario, 1999.
Alberto Del Rosso
received his Electromechanical Engineer diploma form the Universidad Tecnologica Nacional (UTN),
Mendoza-Argentina, in March 1995. He is PhD student at the Instituto de Energia Electrica, Universidad Nacional de San Juan, San
Juan-Argentina. Mr. Del Rosso is currently performing research
activities as visiting scholar at the University of Waterloo, E&CE
Department. The area of his research is concerned with dynamic
security and control of FACTS devices.
Claudio A. Ca~nizares received in April 1984 the Electrical Engineer diploma from the Escuela Politecnica Nacional (EPN), QuitoEcuador, where he held dierent teaching and administrative positions from 1983 to 1993. His M.Sc. (1988) and Ph.D. (1991) degrees in Electrical Engineering are from the University of Wisconsin{
Madison. Dr. Ca~nizares is currently an Associate Professor at the
University of Waterloo, E&CE Department, and his research activities are mostly concentrated in studying stability, modeling and computational issues in ac/dc/FACTS systems.
Victor H. Quintana received the Dipl. Ing. degree from the State
Technical University of Chile in 1959, and the M.Sc. and Ph.D.
degrees in Electrical Engineering from the University of Wisconsin,
Madison in 1965, and University of Toronto, Ontario, in 1970, respectively. Since 1973 he has been with the University of Waterloo,
Department of Electrical and Computer Engineering, where he is a
full professor. His main research interests are in the areas of numerical optimization techniques, state estimation and control theory as
applied to power systems.
Victor Do~na obtained his Electrical Engineer diploma from the
Universidad Nacional de San Juan (UNSJ), San Juan, Argentina, in
March 1986. From 1986 to 1990 he worked for CONICET at the
Instituto de Energa Electrica (IEE), UNSJ, San Juan, Argentina.
From 1990 to 1993 he performed research tasks at IAEW at the
University of Aachen, Germany. In 1993 returned to work at the IEE,
and in 1996 received the Ph.D. degree in Electrical Engineering from
UNSJ. Dr. Do~na is currently Professor at UNSJ and his activities
include power system studies and software programming as a senior
engineer, teaching and graduate supervision in the general area of
security and optimization of power systems.