Implicit-Explicit Runge-Kutta schemes for hyperbolic systems
advertisement

HYP2002
Ninth International Conference on Hyperbolic Problems Theory, Numerics, Applications
Pasadena, California, March 25-29, 2002
Implicit-Explicit Runge-Kutta schemes
for hyperbolic systems with relaxation
Lorenzo Pareschi
Department of Mathematics
University of Ferrara, Italy
pareschi@dm.unife.it
http://www.unife.it/∼prl
Joint work with
Giovanni Russo
University of Catania
1
Introduction
Hyperbolic systems with relaxation
Many physical models are described by hyperbolic systems with relaxation of the form
∂tU + ∂xF (U ) =
1
R(U ),
ε
x ∈ R,
where U = U (x, t) ∈ RN , F : RN → RN , F 0 (U ) has real eigenvalues and admits a basis of
eigenvectors ∀ U ∈ RN and ε > 0 is called relaxation parameter.
Examples
Gas dynamics
Shallow water
Discrete kinetic models
Extended Thermodynamics
Hydrodynamical models for semiconductors
Traffic models
Granular gases
...................
Related problems: convection-diffusion-reaction, low Mach number/diffusive limits
. Purpose of the talk is to give an overview of Runge-Kutta time discretization methods
for such systems, with particular emphasis on the treatment of stiff regimes.
2
Example:
A simple prototype example of relaxation system is given by
∂tu + ∂xf1(u, v) = 0,
1
∂tv + ∂xf2(u, v) = − (v − e(u)),
ε
which corresponds to U = (u, v), F (U ) = (f1 (u, v), f2 (u, v)), R(U ) = (0, e(u) − v).
As ε → 0 we get the local equilibrium v = e(u) and setting G(u) = f1 (u, e(u)) the reduced
system of conservation laws
∂tu + ∂xG(u) = 0.
Numerical requirements
• In most cases F (U ) is non stiff and 1ε R(U ) contains the stiffness. It is desirable to
develop numerical schemes which are explicit in F and implicit in R.
• It is essential that the numerical scheme is accurate for the reduced limit system of
conservation laws. This property is related to L-stability.
• The schemes should be high resolution shock capturing, yielding correct shock location and speed without numerical oscillations.
3
Outline
. Implicit-Explicit (IMEX) Runge-Kutta schemes
– Splitting methods
– IMEX-Runge Kutta
– Order conditions
. Asymptotic behavior
– Zero relaxation limit
– Asymptotic properties of IMEX schemes
. Stability analysis
– Stability matrix
– Prototype equations
. Space discretizations
. Applications
. Conclusions
4
Implicit-Explicit Runge Kutta schemes
We can consider the system of ode’s
1
y 0 = f (y) + g(y),
ε
where y = y(t) ∈ RN , f, g : RN → RN .
Splitting methods
A simple splitting consists in solving separately the non-stiff problem
y 0 = f (y),
applying an explicit scheme and, using an implicit scheme, the stiff problem
y0 =
1
g(y).
ε
Only first order accurate, but has several advantages:
. Some properties of the solution are maintained (e.g. positivity, strong stability perserving
(SSP) property)
. Consistency with the stiff limit as ε → 0
. In many cases the implicit scheme for g can be explicitly solved
Remark Higher order splitting methods (ex. Strang splitting) can be constructed. Tipically these extensions present a severe loss of accuracy when the g term is stiff.
5
IMEX-RK methods
An Implicit-Explicit (IMEX) Runge-Kutta scheme has the form
Yi = y 0 + h
y1 = y 0 + h
i−1
X
j=1
ν
X
ãij f (t0 + c̃j h, Yj ) + h
w̃i f (t0 + c̃i h, Yi ) + h
i=1
ν
X
1
aij g(t0 + cj h, Yj ),
ε
j=1
ν
X
1
wi g(t0 + ci h, Yi ).
ε
i=1
à = (ãij ), ãij = 0, j ≥ i and A = (aij ): ν × ν matrices.
Coefficient vectors: c̃ = (c̃1 , . . . , c̃ν )T , w̃ = (w̃1 , . . . , w̃ν )T , c = (c1 , . . . , cν )T , w = (w1 , . . . , wν )T .
c̃
Ã
c
A
Double Butcher tableau:
.
w̃T
wT
Sufficient condition to guarantee that f is always evaluated explicitly: the scheme for g
is diagonally implicit (DIRK) and the first raw and first column of A are zero.
Remarks
• Similarly to splitting methods IMEX schemes can be applied as a sequence of single
explicit steps for f and implicit steps for g. This property is important in applications.
• Previously developed Runge-Kutta methods for similar problems can be cast in the
IMEX formalism (Zhong methods, splitting methods).
6
Some References:
• F.Coron, B.Perthame, SIAM J. Numer. Anal., (1991)
• R. Pember, SIAM J. Sci. Stat. Comp. and SIAM J. App. Math., (1993)
• P. Roe, M. Arora, Num. Meth. PDEs, (1993).
• S. Jin, J. Comp. Phys., (1995)
• R. E. Caflisch, S. Jin and G. Russo, SIAM J. Numer. Anal., (1997).
• U. Ascher, S. Ruuth, B. Wetton, SIAM J. Numer. Anal., (1995)
• U. Asher, S. Ruuth, and R. J. Spiteri, Appl. Numer. Math., (1997)
• X. Zhong, J. Comp. Phys., (1996)
• G. Akridis, M. Crouzeix, C. Makridakis, Num. Math., (1999)
• J. Frank, W. H. Hudsdorder, J. G. Verwer, App. Num. Math., (1997)
• C. A. Kennedy, M. H. Carpenter, App. Num. Math., (2003)
• L.P., G.Russo, Adv. Th. Comp. Math. (2000), preprint (2003)
• M.L.Minion, Comm. Math. Sci. (to appear)
• S.F.Liotta, V.Romano, G.Russo, SIAM J. Numer. Anal., (2001)
• L.P., SIAM J. Numer. Anal, (2001).
• M.K.Banda, A.Klar, L.P., M.Seaid, App. Math. Lett. (2003), preprint (2002)
7
Order conditions
Assume
c̃i =
P
j ãi,j ,
ci =
P
j ai,j ,
P
P
i w̃i = 1,
i wi
= 1.
then the analysis can be limited to autonomous systems and the first order conditions
are automatically satisfied.
Second order:
P
i w̃i c̃i = 1/2,
Third order:
P
ij w̃i ãij c̃j = 1/6,
P
P
i wi ci = 1/2,
P
= 1/3,
P
i w̃i c̃i c̃i
i w̃i ci = 1/2,
ij
P
wi aij cj = 1/6,
Mixed conditions:
P
P
w̃
ã
c
=
1/6,
ij i ij j
ij w̃i aij c̃j = 1/6,
P
P
w
ã
c
=
1/6,
ij i ij j
ij wi aij c̃j = 1/6,
P
P
w̃
c
c
=
1/3,
i
i
i
i
i w̃i c̃i ci
P
P
w
c̃
c̃
=
1/3,
i i i i
i wi c̃i ci
P
P
i wi c̃i
P
= 1/2,
i w i ci ci
ij
w̃i aij cj = 1/6,
ij
wiãij c̃j = 1/6,
= 1/3,
= 1/3,
= 1/3.
Remark If wi = w̃i and ci = c̃i , then mixed conditions are automatically satisfied. This is
not true for higher that third order accuracy
8
Higher order: IMEX schemes can be considered as a particular case of additive RungeKutta methods and therefore higher order conditions can be derived as well using a
generalization of Butcher 1-trees to 2-trees. However the number of coupling conditions
increase dramatically with the order of the schemes.
IMEX-RK
order
1
2
3
4
5
6
Number of coupling conditions
General case w̃i = wi c̃ = c c̃ = c and w̃i = wi
0
0
0
0
2
0
0
0
12
3
2
0
56
21
12
2
252
110
54
15
1128
528
218
78
9
Examples of IMEX schemes
Notation: SCHEME(s, σ, p)
s implicit stages, σ explicit stages, p order. Explicit tableu (left), Implicit tableu (right).
SP(1,1,1)
0 0
1
1 1
1
Midpoint(1,2,2)
0
0
0
1/2 1/2 0 ,
0
1
0
0
0
1/2 0 1/2 ,
0
1
0
1
−1
2
Jin(2,2,2)
0
0
1
0 ,
1/2 1/2
−1
0
1
1
1/2 1/2
10
CJR(3,2,2)
0 0
0
α̃ α̃
0
α̃ α̃
0
1 ηα̃ η β̃
1 ηα̃ η β̃
2µ − 1
β=
,
2(µ − 1)
0
0
0
0
0
0
0
0
0
0
2µ2 − 2µ + 1
γ=−
,
2µ(µ − 1)
0 0
0 0
γ γ
1 γη
1 γη
α̃ =
1
,
2µ
0 0
0 0
0 β
0 βη
0 βη
β̃ = −
0
0
0
µ
µ
1
,
2(µ − 1)
η = −2µ(µ − 1)
LRR(3,2,2)
0
0
0 0
1/2 1/2 0 0
1/3 1/3 0 0
1
0
1 0
0
1 0
0
0
0 ,
0
0
0
1/2
1/3
1
1
0
0
0
0
0 1/2
0
0
0
0
1/3
0
0
0
3/4 1/4
0
0
3/4 1/4
ARS(2,2,2)
0 0
0
γ γ
0
1 δ 1−δ
δ 1−δ
0
0
,
0
0
0
0 0
γ 0
γ
1 0 1−γ
0 1−γ
0
0
,
γ
γ
γ =1−
√
1
2
,δ = 1 −
2
2γ
11
Asymptotic behavior
Relaxation operators and zero-relaxation limit
Let us consider an hyperbolic system with relaxation
1
∂t U + ∂x F (U ) = R(U ), x ∈ R.
ε
N
N
The operator R : R → R is said a relaxation operator if there exists a constant n × N
matrix Q with rank(Q) = n < N such that
QR(U ) = 0
∀ U ∈ RN .
This gives n independent conserved quantities u = QU that uniquely determine a local
equilibrium U = E(u), such that R(E(u)) = 0.
We obtain a system of n conservation laws which is satisfied by every solution of the
relaxation system
∂t(QU ) + ∂x(QF (U )) = 0.
As ε → 0 we get R(U ) = 0 which implies U = E(u). In this case the relaxation system is
well approximated by the reduced system
∂tu + ∂xG(u) = 0,
where G(u) = QF (E(u)).
12
Asymptotic properties of IMEX schemes
An IMEX scheme for an hyperbolic system with relaxation has the form
Ui(i)
= U0 + h
U1 = U 0 + h
i−1
X
j=1
ν
X
i=1
ãij F (U
(j)
)+h
w̃i F (U (i)) + h
ν
X
1
aij R(U (j)),
ε
j=1
ν
X
1
wi R(U (i)).
ε
i=1
Definition 1 We say that an IMEX scheme for an hyperbolic system with relaxation
is asymptotic preserving (AP) if in the limit ² → 0 the scheme becomes a consistent
discretization of the limit system of conservation laws. We use the notation APk if the
scheme is of order k in the limit ² → 0.
Note that this definition does not imply that the scheme preserves the order of accuracy
in t in the stiff limit ² → 0. In the latter case the scheme is said asymptotically accurate.
Examples: Scheme SP(1,1,1) is clearly AP1 . Scheme Jin(2,2,2) is AP2 , but it is not
uniformly valid in ε. Schemes Midpoint(1,2,2) and CN(2,2,2) are not AP even if both
implicit parts of the schemes are A-stable. On the contrary, schemes CJR(3,2,2) and
LRR(3,2,2) are AP and uniformly valid in ε, but only scheme LRR(3,2,2) is AP2 .
13
Lemma 1 If all diagonal element of the triangular coefficient matrix A that characterize
the DIRK scheme are non zero, then
lim R(U i) = 0.
²→0
Proof:
In the limit ² → 0 we have
i
X
aij R(U j ) = 0,
i = 1, . . . , ν.
j=1
Since the matrix A is non-singular, this implies R(U i) = 0, i = 1, . . . , ν.
Remarks
• As a consequence the vectors of c and c̃ cannot be equal. In fact c̃1 = 0 whereas
c1 6= 0. Note that the condition c = c̃ is commonly used by several authors since it
simplifies the analysis of the schemes.
• If c1 = 0 then the corresponding scheme may be inaccurate if the initial condition is
not “well prepared”. In this case the scheme is not able to treat the so called initial
layer problem and degradation of accuracy in the stiff limit is expected.
Theorem 1 If det A 6= 0 then in the limit ² → 0, the IMEX scheme applied to an hyperbolic
system with relaxation becomes the explicit RK scheme characterized by (Ã, w̃, c̃) applied
to the limit system of conservation laws.
14
Remark
• Clearly one may claim that if the implicit part of the IMEX scheme is A-stable or
L-stable the previous theorem is satisfied. Note however that this is true only if the
tableau of the implicit integrator does not contain any column of zeros that makes
it reducible to a simpler A-stable or L-stable form.
• Finally we observe that this result does not guarantee the accuracy of the solution
for the N − n non conserved quantities. In fact, since the very last step in the scheme
it is not a projection towards the local equilibrium, a final layer effect occurs.
It is easy to show that
Corollary 1 If det A 6= 0 and wj = aνj , j = 1, . . . ν then in the limit ² → 0, the IMEX
scheme is asymptotically accurate, that is it provides the order of accuracy of the explicit
RK scheme characterized by (Ã, w̃, c̃) for both conserved and non conserved variables
We recall that the additional condition wj = aνj , j = 1, . . . ν makes an A−stable method
L−stable. Usually these methods are referred to as stiffly accurate.
15
Theorem guarantees that in the stiff limit the numerical scheme becomes the explicit
RK scheme applied to the equilibrium system, and therefore the order of accuracy of the
limiting scheme is greater or equal to the order of accuracy of the original IMEX scheme.
In particular this implies that if the explicit part of the IMEX scheme is SSP then, in
the stiff limit, we will obtain an SSP method for the limiting conservation law. This
asymptotic SSP property is essential to avoid spurious oscillations in the limit scheme for
the limiting system of conservation laws.
We recall that if U n represents a vector of solution values (for example obtained from a
method of lines approach) we recall the following
Definition 2 A sequence {U n }n∈N is said to be strongly stable in a given norm ||·|| provided
that ||U n+1 || ≤ ||U n || for all n ≥ 0.
The most commonly used norms are the T V -norm and the infinity norm.
16
Examples of IMEX-SSP schemes
In all these schemes the implicit tableau corresponds to an L−stable scheme, that is
wT A−1 e = 1, e being a vector whose components are all equal to 1, whereas the explicit
tableau is SSPk, where k denotes the order of the SSP scheme.
IMEX-SSP2(2,2,2) L-stable scheme
0
1
0
0
1
0
1/2 1/2
γ
1−γ
γ
1 − 2γ
1/2
0
γ
1/2
1
γ =1− √
2
IMEX-SSP2(3,2,2) stiffly accurate scheme
0 0
0
0
0 0
0
0
1 0
1
0
0 1/2 1/2
0
0
1/2 1/2
0
−1/2 1/2
0
1
0
1/2 1/2
0
1/2 1/2
IMEX-SSP2(3,3,2) stiffly accurate scheme
0
0
0
0
1/2 1/2
0
0
1
1/2 1/2
0
1/3 1/3 1/3
0
0
1/4 1/4
1/4
0
1/4
0
1
1/3 1/3 1/3
1/3 1/3 1/3
17
IMEX-SSP3(3,3,2) L-stable scheme
0
0
0
0
1
1
0
0
1/2 1/4 1/4
0
1/6 1/6 2/3
γ
1−γ
1/2
γ
1 − 2γ
1/2 − γ
1/6
0
0
γ
0
0
γ
1/6 2/3
1
γ =1− √
2
IMEX-SSP3(4,3,3) L-stable scheme
0
0
1
1/2
0
0
0
0
0
0
0
0
0
1
0
0
0 1/4 1/4
0
0 1/6 1/6 2/3
α = 0.24169426078821,
α
0
0
0
α
0
−α
α
0
0
1
0 1−α
α
0
η
1/2 − β − η − α
α
1/2 β
0
1/6
1/6
2/3
β = 0.06042356519705
η = 0.12915286960590
Stability analysis
When studying the A-stability of a RK scheme, one considers a scalar equation of the
form
y 0 = λy,
y(0) = 1
with y : R+ → R, and λ ∈ R, <λ ≤ 0. Such test problem is sufficient to characterize the
stability property of a Runge-Kutta scheme when applied to a linear system of the form
y 0 = By,
y(0) = y0
with y ∈ Rm , and B ∈ Rm×m .
In the case of IMEX-RK, and in general for additive Runge-Kutta methods, such a stability
analysis has a limited validity. In fact, consider a generic linear system of the form
y 0 = B1 y + B 2 y
with y ∈ Rm , and B1 , B2 ∈ Rm×m , and apply an IMEX scheme which is explicit in B1 y and
implicit in B2 y. The stability of the numerical solution depends on the two matrices B1
and B2 , and not only on their eigenvalues since in general the two matrices do not share
the same eigenvectors, and therefore they can not be diagonalized simultaneously.
18
Stability matrix for a linear system
Let us apply a Runge-Kutta scheme defined by A and w to the linear system
y 0 = By,
with y ∈ Rm . Then one has
y1 = y 0 + h
ν
X
wi BY (i),
y(0) = y0
Y (i) = y0 + h
i=1
ν
X
aij BY (j)
j=1
Let e ≡ (1, . . . , 1)T ∈ Rm denote a column vector whose components are unitary and let us
define the Kronecker products
n
y
a11 B a12 B · · · a1ν B
n
a21 B a22 B · · · a2ν B
y
n
e ⊗ y = .. , A ⊗ B = ..
.
.
.
.
.
.
.
.
aν1 B aν2 B · · · aνν B
yn
After some manipulation the scheme can be conveniently written as
y n+1 = Ry n
where the m × m matrix of absolute stability R is given by
with Z ≡ h B.
R(Z) = Im + wT Z ⊗ (Iνm − A ⊗ Z)−1 e ⊗ Im ,
19
The corresponding scalar function
R(z), z ∈ R
is said the function of absolute stability. The eigenvalues of the matrix of absolute
stability are given by the absolute stability function evaluated at the eigenvalues of the
matrix Z
λ(R(Z)) = R(λ(Z))
and therefore the spectral radius of the matrix of absolute stability is given by
m
ρ(R(Z)) = max |R(λj (Z))|.
j=1
Similarly for a partitioned Runge-Kutta scheme applied to the system
y 0 = B1 y + B 2 y
one obtains
y n+1 = R(Z1 , Z2 )y n
where Z1 = h B1 , Z2 = h B2 , and the matrix of absolute stability is given by
R(Z1 , Z2 ) = Im + (w̃T ⊗ Z1 + wT ⊗ Z2 )(Iνm − Ã ⊗ Z1 − A ⊗ Z2 )−1 e ⊗ Im .
At variance with the standard case, the spectral radius of the matrix does not depend only
on the eigenvalues of the matrices Z1 and Z2 , since the two matrices B1 and B2 in general
do not have a common set of eigenvectors, they can not be diagonalized simultaneously.
20
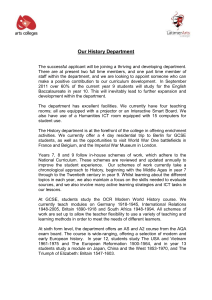
Prototype problem
A simple non trivial 2 × 2 relaxation system is given by
ut + v x = 0
vt + ux = −µ(v − bu)
In the stiff limit µ → ∞ for 0 < b < 1 the system relaxes to the equation
ut + bux = 0
We look for a Fourier solution u = û(t)eiξx , v = v̂(t)eiξx . One obtains
ût + iξv̂ = 0
v̂t + iξû = −µ(v̂ − bû)
The system can be written in vector form as
dU
= C1 U + C 2 U
dt
where
U =
µ
û
v̂
¶
,
C1 = −iξ
µ
0 1
1 0
¶
,
C2 = −µ
µ
0 0
−b 1
¶
The boundary of the region of absolute stability is given by the relation
ρ(R(Z1 , Z2 )) = 1
where ρ denotes the spectral radius, and Z1 = hC1 , Z2 = hC2 .
21
SP−111
Midpoint−122
5
5
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
4
3
3
2
2
1
1
ξh
ξh
4
0
0
−1
−1
−2
−2
−3
−3
−4
−4
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
6
10
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
6
10
Relaxation stability region for scheme SP-111 and Midpoint-122 in the ξh–µh plane.
22
LRR−322
SSP2−222
5
5
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
4
3
3
2
2
1
1
ξh
ξh
4
0
0
−1
−1
−2
−2
−3
−3
−4
−4
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
6
10
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
Relaxation stability region for scheme LRR-322 and SSP2-222 in the ξh–µh plane.
5
10
6
10
SSP2−322
SSP2−332
5
5
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
4
3
3
2
2
1
1
ξh
ξh
4
0
0
−1
−1
−2
−2
−3
−3
−4
−4
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
6
10
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
Relaxation stability region for scheme SSP2-322 and SSP2-332 in the ξh–µh plane.
5
10
6
10
SSP3−332
SSP3−433
5
5
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
4
3
3
2
2
1
1
ξh
ξh
4
0
0
−1
−1
−2
−2
−3
−3
−4
−4
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
b = 0.1
b = 0.3
b = 0.5
b = 0.7
b = 0.9
6
10
−5
−2
10
−1
10
0
10
1
10
2
10
µh
3
10
4
10
5
10
Relaxation stability region for scheme SSP3-332 and SSP3-433 in the ξh–µh plane.
6
10
Numerical test
Prototype of stiff system
u0 = −v,
1
(e(u) − v).
ε
(Note: eigenvalues of the explicit part are ±i)
v0 = u +
Convergence plot, obtained by different values of time step h (starting with h = 0.05). ε
ranges from 10−5 to 1.
L2 norm of the relative error versus ² using a log-scale on the x-axis.
Equilibrium data
u(0) = π/2,
v(0) = sin(u(0)) = 1.
Non-equilibrium data
u(0) = π/2,
v(0) = 1/2.
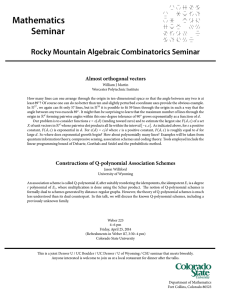
23
Convergence rates of some second and third order IMEX schemes for equilibrium initial
data (dashed: v component, continuous: u component).
SSP2−322
SSP2−332
3
2.5
2.5
2.5
2
2
2
1.5
1
Convergence rate
3
Convergence rate
Convergence rate
SSP2−222
3
1.5
1
1.5
1
0.5
0.5
0.5
0
0
0
−0.5
−6
10
−5
−4
10
−3
10
−2
10
Epsilon
−1
10
10
−0.5
−6
10
0
10
−5
10
ARS−222
−4
10
−3
10
Epsilon
−2
10
−1
10
−0.5
−6
10
0
10
−5
10
SSP3−332
3
−4
10
−3
10
Epsilon
−2
10
−1
10
SSP3−443
4
4
3.5
3.5
3
3
2.5
2.5
2.5
1.5
1
Convergence rate
Convergence rate
Convergence rate
2
2
1.5
2
1.5
1
1
0.5
0.5
0
0
0.5
0
−0.5
−5
10
−4
10
−3
−2
10
10
Epsilon
−1
10
0
10
−0.5
−6
10
−5
10
−4
10
−3
10
Epsilon
−2
10
−1
10
0
10
−0.5
−6
10
−5
10
−4
10
−3
10
Epsilon
−2
10
−1
10
0
10
24
0
10
Convergence rates of some second and third order IMEX schemes for non equilibrium
initial data (dashed: v component, continuous: u component).
SSP2−322
SSP2−332
3
2.5
2.5
2.5
2
2
2
1.5
1
Convergence rate
3
Convergence rate
Convergence rate
SSP2−222
3
1.5
1
1.5
1
0.5
0.5
0.5
0
0
0
−0.5
−6
10
−5
−4
10
−3
10
−2
10
Epsilon
−1
10
10
−0.5
−6
10
0
10
−5
10
ARS−222
−4
10
−3
10
Epsilon
−2
10
−1
10
−0.5
−6
10
0
10
−5
10
SSP3−332
3
−4
10
−3
10
Epsilon
−2
10
−1
10
SSP3−443
4
4
3.5
3.5
3
3
2.5
2.5
2.5
1.5
1
Convergence rate
Convergence rate
Convergence rate
2
2
1.5
2
1.5
1
1
0.5
0.5
0
0
0.5
0
−0.5
−5
10
−4
10
−3
−2
10
10
Epsilon
−1
10
0
10
−0.5
−6
10
−5
10
−4
10
−3
10
Epsilon
−2
10
−1
10
0
10
−0.5
−6
10
−5
10
−4
10
−3
10
Epsilon
−2
10
−1
10
0
10
25
0
10
Space discretizations
We consider the case of the single scalar equation
1
g(u).
ε
We have to distinguish between schemes based on cell averages (finite volume approach
as in most schemes) and schemes based on point values (finite difference approach).
ut + f (u)x =
Let ∆x and ∆t be the mesh widths. We introduce the grid points
xj = j∆x,
xj+1/2 = xj +
1
∆x,
2
j = . . . , −2, −1, 0, 1, 2, . . .
and use the standard notations
unj
n
= u(xj , t ),
1
ūnj =
∆x
Z
xj+1/2
u(x, tn ) dx.
xj−1/2
Finite volumes
Integrating the equation on Ij = [xj−1/2 , xj+1/2 ] and dividing by h we obtain
¯
dū ¯¯
1
1
=
−
,
t))
−
f
(u(x
,
t))
+
[f
(u(x
g(u)|j
j+1/2
j−1/2
dt ¯j
∆x
ε∆x
As usual the key step is the reconstruction step necessary to reconstruct the function
u(x, t) at the grid points (required to evaluate the right hand side) starting from its cell
¯ t).
average u(x,
26
IMEX schemes cannot be applied straightforwardly since on the right hand side we have
the average of the source term g(u) instead of the source term evaluated at the average
of u, g(ū). This makes it difficult to construct IMEX-like schemes of order higher than
two (in fact g(u) = g(u) + O(∆x2 )).
Finite differences
In the position x = xj we obtain
duj
1
= −f (u)x |j + g(uj )
dt
ε
where f (u)x |j is an approximation of f (u)x at the grid point x = xj .
Clearly in this latter case IMEX schemes can be applied directly without any additional
difficulty due to the presence of the source term.
Remark An essential feature in all these schemes is the ability of the schemes to handle
with discontinuous solutions. To this aim it is necessary to use non-oscillatory interpolating
algorithms, in order to prevent the onset of spurious oscillations (like WENO methods).
Applications
Broadwell model
∂tρ + ∂xm = 0,
∂tm + ∂xz = 0,
1
∂tz + ∂xm = (ρ2 + m2 − 2ρz),
ε
where ε is the mean free path. The dynamical variables ρ and m are the density and the
momentum respectively, while z represents the flux of momentum.
We perform an accuracy test for schemes ARS(2,2,2) and IMEX-SSP2(2,2,2) with smooth
initial data and periodic b.c. The space discretization is carried out on a staggered grid
using Nassyahu and Tadmor central schemes strategy.
27
Accuracy Test, Convergence Rates
ε
10−1
1.0
10−2
10−3
10−5
Convergence Rates for ρ
ARS(2,2,2)
IMEX-SSP2(2,2,2)
2.04134
2.01855
2.07772
2.04453
1.55946
1.51302
2.11211
2.07418
1.39357
1.15942
1.96649
2.00709
1.39515
1.16581
2.04715
1.98219
N
1.39479
1.16539
2.06860
2.04030
100-200
200-400
100-200
200-400
1.25448
1.12197
2.08532
2.04047
100-200
200-400
100-200
200-400
Convergence Rates for z
ARS(2,2,2)
IMEX-SSP2(2,2,2)
1.92939
1.95090
2.06926
2.03151
1.36074
1.43807
2.23039
2.17488
1.24543
1.11493
1.60070
1.76238
1.25382
1.12162
1.85409
1.59695
28
Initial layer fix
Next, we test the schemes with following two Riemann problems
ρl = 2,
ρr = 1,
mr
ρl = 1,
ρr = 0.2,
ml = 1,
= 0.13962,
ml = 0,
mr = 0,
=
=
=
=
zl
zr
zl
zr
ε=1e−008, t=0.50, N=200
1,
1,
1,
1,
x < 0.2,
x > 0.2,
x < 0,
x > 0.
5
(2)
ε=1e−008, t=0.25, N=200
−3
2.05
(1)
x 10
4
3
2
z(x,t)−zE(x,t)
ρ(x,t)
1
2
0
−1
−2
−3
−4
1.95
−0.2
−0.15
−0.1
−0.05
0
x
0.05
0.1
0.15
0.2
−5
0.2
0.25
0.3
0.35
x
0.4
0.45
0.5
Initial layer for ρ in problem 1 (left) and departure from equilibrium z − z E in problem 2 (right) for ε =
10−8 . Left problem: ARS(2,2,2) (∗), ARSF(2,2,2) (◦), IMEX-SSP2(2,2,2) (×). Right problem: IMEXSSP2(2,2,2) (+), IMEX-SSP2F(2,2,2) (×), ARS(2,2,2) (◦).
29
Monatomic gas in Extended Thermodynamics
1
Ut + F (U )x = R(U )
²
U =
ρ
ρv
1
2
ρv + 32 p
2
2
ρv 2 + σ
3
ρv 3 + 5vp + 2σv + 2q
F =
,
R = −
0
0
0
ρσ
2
ρ(2q + 3vσ)
3
ρv
2
ρv + p + σ
1
3
ρv + 52 vp + σv + q
2
2
3 + 4 vp + 7 vσ + 8 q
ρv
32
3
3
15
p
σp
32
4
2
ρv + 5 ρ + 7 ρ + 5 qv + v (8p + 5σ)
ρ: density, u: velocity, p: pressure, σ: stress, q: heat flux
,
As ² → 0 ⇒ σ → 0, q → 0 we obtain the Euler equations for monatomic gas.
We use IMEX-SSP2(2,2,2) central scheme for a generalization of classical Sod’s problem
U = Ul = (1, 0, 5, 0, 0),
U = Ur = (0.125, 0, 0.5, 0, 0),
x < 0.5,
x > 0.5.
30
ε=1e−004, t=0.1, N=200
ε=1e−004, t=0.1, N=200
1.2
ε=1e−004, t=0.1, N=200
0.25
1.8
1.6
0.2
1
1.4
0.15
1.2
0.8
1
u(x,t)
q(x,t)
0.6
0.8
0.05
0.6
0.4
0.4
0
0.2
0.2
−0.05
0
0
0.1
0.2
0.3
0.4
0.5
x
0.6
0.7
0.8
0.9
−0.1
1
0
0.1
0.2
0.3
0.4
0.5
x
0.6
0.7
0.8
0.9
ε=1e−004, t=0.1, N=200
−0.2
1
0
0.1
0.2
0.3
0.4
0.5
x
0.6
0.7
0.8
0.9
1
ε=1e−004, t=0.1, N=200
0.07
3.5
0.06
3
0.05
2.5
0.04
2
p(x,t)
0
σ(x,t)
ρ(x,t)
0.1
0.03
1.5
0.02
1
0.01
0.5
0
−0.01
0
0.1
0.2
0.3
0.4
0.5
x
0.6
0.7
0.8
0.9
1
0
0
0.1
0.2
0.3
0.4
0.5
x
0.6
0.7
0.8
0.9
1
ε = 10−4 , λ = 0.1, N = 200 at time t = 0.1.
31
Lattice-Boltzmann models
1
v
∂tf + · ∇xf = 2 (f − f eq ),
²
² τ
x, v ∈ R 2 ,
N = 9,
ci ∈ {(0, 0), (0, ±1), (±1, 0), (±1, ±1)}.
µ
¶
3
9
f eq [ρ, u](v) = ρ 1 + 3u · v − |u|2 + (u · v)2 f ∗ (v),
2
2
v ∈ {c0, . . . , cN −1 },
ρ(x, t) =
N
−1
X
f (x, ci , t),
ρu(x, t) =
i=0
f ∗ (c 0 ) =
4
,
9
N
−1
X
cif (x, ci, t),
i=0
f ∗ (c i ) =
1
, i = 1, ..., 4,
9
f ∗ (c i ) =
1
, i = 5, ..., 8
36
As ² → 0 we obtain the incompressible Navier-Stokes equations with Reynolds number
O(1/τ ).
shear layer
(x, y) ∈ [0, 2π]2 , ux (x, 0) = 0.05 sin(x), periodic b.c. and
uy (x, y) = tanh(15(y − π/2)/π),
y < π,
uy (x, y) = tanh(15(3π/2 − y)/π),
y > π.
We test IMEX-SSP2(2,2,2) and IMEX-SSP3(3,3,2) schemes combined with second and
third order upwind schemes based on CWENO reconstructions.
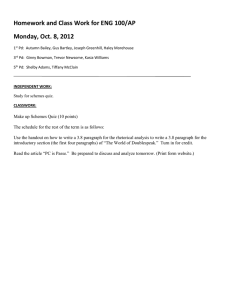
32
Euler case (τ = 0): First order (left), Second order (center), Third order (right) at t=4
6
5
4
4
4
3
2
1
0
0
4
3
2
1
0
0
6
5
5
0
0
0
6
1
1
6
2
2
1
2
3
h = 1/128
3
3
3
5
5
4
4
3
3
h = 1/64
2
2
1
1
0
0
1
2
3
h = 1/64
h = 1/64
4
5
6
4
0
0
4
1
1
5
2
2
5
3
3
6
4
4
6
5
5
6
6
6
0
1
1
2
2
3
h = 1/128
h = 1/128
4
5
5
6
6
with N = 64 (bottom) and N = 128 (top) for ε = 10−6 .
33
Navier-Stokes case (τ = 0.01): First order (left), Second order (center), Third order
6
5
4
4
4
3
2
1
0
0
4
3
2
1
0
0
6
5
5
0
0
0
6
1
1
6
2
2
1
2
3
h = 1/128
3
3
3
5
5
4
4
3
3
h = 1/64
2
2
1
1
0
0
1
2
3
h = 1/64
h = 1/64
4
5
6
4
0
0
4
1
1
5
2
2
5
3
3
6
4
4
6
5
5
6
6
6
0
1
1
2
2
3
h = 1/128
h = 1/128
4
5
5
6
6
(right) at t=10 with N = 64 (bottom) and N = 128 (top) for ε = 10−6 .
34
Conclusions
Runge-Kutta IMEX schemes represent a powerful tool for the time discretization of hyperbolic systems with relaxation. In combination with finite volume schemes (up to second
order) or finite difference schemes (of any order) they provide a new class of efficient
underresolved schemes for the accurate solution of hyperbolic conservation laws with stiff
source terms.
Open problems and extensions:
◦ 4th and 5th order IMEX-SSP schemes
◦ Higher order (more than third) finite volume schemes for hyperbolic systems with
stiff relaxation
◦ Less restrictive conditions for APk property
◦ Development of well-balanced schemes that avoid numerical viscosity
◦ Adaptive multi-modelling
◦ Coupling with hybrid Monte Carlo strategies for multiscale problems.
35