Differential Equations Cheatsheet: Formulas & Methods
advertisement

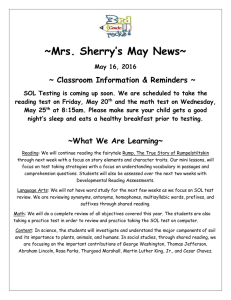
Differential Equations Cheatsheet 2nd-order Homogeneous F (y 00 , y 0 , y, x) = 0 Jargon General Solution: a family of functions, has parameters. Particular Solution: has no arbitrary parameters. Singular Solution: cannot be obtained from the general solution. Reduction of Order - Method If we already know y1 , put y2 = vy1 , expand in terms of v 00 , v 0 , v, and put z = v 0 and solve the reduced equation. Linear Equations Wronskian (Linear Independence) y (n) (x) + an−1 (x)y (n−1) (x) + · · · + a1 (x)y 0 (x) + a0 (x)y(x) = f (x) 1st-order F (y 0 , y, x) = 0 y 0 + a(x)y = f (x) Variable Separable dy = f (x, y) dx Test: I.F. = e R a(x)dx Sol: y = Ce− a(x)dx Euler-Cauchy Equation f (tx, ty) = t0 f (x, y) = f (x, y) A(x)dx + B(y)dy = 0 Sol: Reduce to var.sep. using: f (x, y)fxy (x, y) = fx (x, y)fy (x, y) dy dv =v+x dx dx y = xv Sol: Separate and integrate on both sides. Bernoulli M (x, y)dx + N (x, y)dy = 0 = dg(x, y) Iff ∂M ∂N = ∂y ∂x Case II Nx − My If ≡ g(x) N I(x, y) = e− then I(x, y) = e− R R 1 . yn Ax + By + C y0 = Dx + Ey + F Case I: Lines intersect Sol: Put x = X + h and y = Y + k, find h and k, solve var.sep. and translate back. I(x, y)[M (x, y)dx + N (x, y)dy] = 0 then and divide by Reduction by Translation Reduction to Exact via Integrating Factor Case I M y − Nx If ≡ h(y) M 1 y n−1 h(y)dx Case II: Parallel Lines (A = B, D = E) u0 − A Sol: Put u = Ax + By, y 0 = and solve. B g(x)dx Case III If M = yf (xy) and N = xg(xy) then I(x, y) = 1 xM −yN Principle of Superposition y 00 +ay 0 +by = f1 (x) has solution y1 (x) y 00 + ay 0 + by = f (x) = f1 (x) + f2 (x) then y 00 +ay 0 +by = f2 (x) has solution y2 (x) has solution: y(x) = y1 (x) + y2 (x) x2 y 00 + axy 0 + by = 0 where x 6= 0 Sol: yh = c1 y1 (x) + c2 y2 (x) Constant Coefficients λ2 + aλ + b = 0 A.E. A. Real roots Sol: y(x) = C1 eλ1 x + C2 eλ2 x B. Single root Sol: y(x) = C1 eλx + C2 xeλx C. Complex roots Sol: y(x) = eαx (C1 cos√βx + C2 sin βx) 2 with α = − a2 and β = 4b−a 2 A. Real roots Sol: y(x) = C1 xλ1 + C2 xλ2 x 6= 0 B. Single root A.E. : λ(λ − 1) + aλ + b = 0 Sol: y(x) = xλ (C1 + C2 ln |x|) Sol: y(x) of the form xλ Reduction to Constant Coefficients: Use x = et , t = ln x, C. Complex roots (λ1,2 = α ± iβ) and rewrite in terms of t using the chain rule. Sol: y(x) = xα [C1 cos(β ln |x|) + C2 sin(β ln |x|)] 2nd-order Non-Homogeneous y 0 + p(x)y = q(x)y n Sol: Change var z = Sol: Find g(x, y) by integrating and comparing: Z Z M dx and N dy If R y1 (x) and y2 (x) are linearly independent iff y y2 6= 0 W (y1 , y2 )(x) = 10 y1 y20 Homogeneous of degree 0 Exact y 00 + a(x)y 0 + b(x)y = 0 F (y 00 , y 0 , y, x) = 0 y 00 + a(x)y 0 + b(x)y = f (x) Simple case: y 0 , y missing Sol: y = yh + yp = C1 y1 (x) + C2 y2 (x) + yp (x) Simple case: y missing y 00 = f (y 0 , x) 00 y = f (x) Sol: Change of var: p = y 0 and then solve twice. Sol: Integrate twice. Simple case: y 0 , x missing Simple case: x missing y 00 = f (y 0 , y) y 00 = f (y) Sol: Change of var: p = y 0 + chain rule, then dp p = f (y) is var.sep. dy Solve it, back-replace p and solve again. Method of Undetermined Coefficients / “Guesswork” Sol: Assume y(x) has same form as f (x) with undetermined constant coefficients. Valid forms: 1. Pn (x) 2. Pn (x)eax 3. eax (Pn (x) cos bx + Qn (x)sinbx Failure case: If any term of f (x) is a solution of yh , multiply yp by x and repeat until it works. Sol: Change of var: p = y 0 + chain rule, then dp p = f (p, y) is 1st-order ODE. dy Solve it, back-replace p and solve again. Variation of Parameters (Lagrange Method) (More general, but you need to know yh ) Sol: yp = v1 y1 + v2 y2 + · · · + vn yn v10 y1 v20 y20 ··· (n−1) vn0 yb + + + + ··· ··· ··· ··· + + + + vn0 yn vn0 yn0 ··· (n−1) vn0 yn Solve for all vi0 and integrate. = = = = 0 0 0 φ(x) Power Series Solutions 1. 2. 3. 4. 5. P∞ Assume y(x) = n=0 cn (x − a)n , compute y’, y” Replace in the original D.E. Isolate terms of equal powers Find recurrence relationship between the coefs. Simplify using common series expansions Taylor Series variant 1. Differentiate both sides of the D.E. repeatedly 2. Apply initial conditions 3. Substitute into T.S.E. for y(x) (Use y = vx, z = v 0 to find y2 (x) if only y1 (x) is known.) Validity For y 00 + a(x)y 0 + b(x)y = 0 if a(x) and b(x) are analytic in |x| < R, the power series also converges in |x| < R. Ordinary Point: Power method success guaranteed. Singular Point: success not guaranteed. Regular singular point: if xa(x) and x2 b(x) have a convergent MacLaurin series near point x = 0. (Use translation if necessary.) Irregular singular point: otherwise. Method of Frobenius for Regular Singular pt. Case II: r1 = r2 y(x) = xr (c0 + c1 x + c2 x2 + · · · ) = ∞ X cn xr+n n=0 Indicial eqn: r(r − 1) + a0 r + b0 = 0 Case I: r1 and r2 differ but not by an integer P∞ y1 (x) = |x|r1 ( n=0 cn xn ) , c0 = 1 P∞ y2 (x) = |x|r2 ( n=0 c∗n xn ) , c∗0 = 1 y1 (x) y2 (x) P∞ = |x|r ( n=0 cn xn ) , P ∞ = |x|r ( n=1 c∗n xn ) + y1 (x)ln|x| c0 = 1 Case III: r1 and r2 differ by an integer P∞ y1 (x) = |x|r1 ( n=0 cn xn ) , P∞ ∗ n r2 y2 (x) = |x| ( n=0 cn x ) + c∗1 y1 (x)ln|x|, c0 = 1 c∗0 = 1 Laplace Transform FIXME TODO Fourier Transform FIXME TODO Author: Martin Blais, 2009. This work is licensed under the Creative Commons “Attribution - Non-Commercial - Share-Alike” license.