Chapter 2: Elastic Constitutive Equations of a Laminate
advertisement

Chapter 2: Elastic Constitutive Equations of a Laminate
2.0 Introduction
• Equations of Motion
• Symmetric of Stresses
• Tensorial and Engineering Strains
• Symmetry of Constitutive Equations
2.1 Three-Dimensional Constitutive Equations
• General Anisotropic Materials
• Orthotropic Materials
• Transversely Isotropic Materials
• Isotropic Materials
2.2 Relation Between Mathematical & Engineering Constants
• Isotropic Materials
• Orthotropic Materials
2.3 Constitutive Equations for an Orthotropic Lamina
• Plane Strain Condition
• Plane Stress Condition
2.4 Constitutive Equations for an Arbitrarily Oriented Lamina
• Coordinate Transformation
• Stress Transformation
• Strain Transformation
• Stiffness and Compliance Matrix Transformation
2.5 Engineering Constants of a Laminate
• Lamina
• Laminate
2.6 Hygrothermal Coefficients of a Lamina
2.7 Summary
2.0 INTRODUCTION
x2 u2
2.0.1 Equations of Motion of Elastic Solids
x
P( x1, x2 , x3 )
• Equations of Equilibrium (Kinetics)
x1 u1
σ ij , j
∂ 2 ui
+ fi = ρ 2
∂t
i, j = 1, 2, 3
σ 22
x3 u3
x2 u2
σ 23
σ 32
σ 33
σ 12
σ 12
σ 31
• Equations of Kinematics
(strain-displacement)
σ 11
(
ε ij = 1 2 ui, j + u j ,i
x1 u1
)
ε22
x3 u3
x2 u2
ε23
ε31
ε33
x3 u3
ε21
• Constitutive Equations (stress-strain)
ε12
ε
32
ε13
x1 u1
ε11
σ ij = Cijkl ε kl
i, j, k , l = 1, 2, 3
2.0.2 Symmetry of Stresses
Consider a plane 1-2.
σ22
x2
σ21
1
σ11
σ12
.
Equilibrium
in x1 σ 11 ∗ 1 ∗ t − σ 11 ∗ 1 ∗ t + σ 21 ∗ 1 ∗ t − σ 21 ∗ 1 ∗ t = 0
σ12
(σ 22 − σ 22 ) ∗ 1 ∗ t − (σ 12 − σ 12 ) ∗ 1 ∗ t = 0
σ11 Moment about A:
1
A
σ21
in x2
σ22
σ 12 ∗ 1 ∗ t − σ 21 ∗ 1 ∗ t = 0
∴ σ 12 = σ 21
Similarly we can show, from 2-3 plane σ 23 = σ 32
1-3 plane σ 13 = σ 31
Therefore, σ ij = σ ji i, j = 1, 2, 3
Stress tensor is Symmetric.
Tensorial and Contracted Notation
Tensorial
Contracted
x1
σ11
σ22
σ33
σ 23 = τ 23
σ 31 = τ 31
σ 12 = τ 12
=
=
=
σ1
σ2
σ3
σ 4 or τ 4
σ 5 or τ 5
σ 6 or τ 6
2.0.3 Tensorial and Engineering Strains
x2
Tensorial Strains:
(
ε ij = 1 2 ui, j + u j ,i
(
ε ii = ui,i
ε ij = 1 2 ui, j + u j ,i
)
)
i = j normal strains.
ε12
)
∂u1
∂x1
∂u
= 2
∂x2
ε1 = ε11 =
ε 2 = ε 22
ε 3 = ε 33
∂u
= 3
∂x3
.
1
A
ε21
γ ij = ε ij + ε ji = ui, j + u j ,i = Total shear strain
Engineering Strains
ε12
1
i ≠ j tensorial shear strain.
Engineering shear strain
(
ε21
x1
ε22
∂u ∂u
ε4 = γ 4 = 2 + 3
∂x3 ∂x2
x2 u2
∂u ∂u
ε5 = γ 5 = 3 + 1
∂x1 ∂x3
ε23
ε21
ε12
ε31
ε32
∂u ∂u
ε6 = γ 6 = 1 + 2
∂x2 ∂x1
ε33
x3 u3
ε13
x1 u1
ε11
Generalized Hooke’s Law (3-D Constitutive Equation)
Stress-Strain Equation
σ1
σ2
σ3
τ4
τ5
τ6
C11
C21
C31
C41
C51
C61
=
σ i = Cij ε j
C12
C22
C32
C42
C52
C62
C13
C23
C33
C43
C53
C63
C14
C24
C34
C44
C54
C64
i, j = 1, 2,3, 4, 5, 6
C15
C25
C35
C45
C55
C65
C16
C26
C36
C46
C56
C66
ε1
ε2
ε3
γ4
γ5
γ6
C is called the stiffness matrix.
Strain-Stress Equation
ε1
ε2
ε3
γ4
γ5
γ6
=
S11
S21
S31
S41
S51
S61
ε i = Sijσ j
S12
S22
S32
S42
S52
S62
S13
S23
S33
S43
S53
S63
S is called the compliance matrix.
S14
S24
S34
S44
S54
S64
i, j = 1, 2,3, 4, 5, 6
S15
S25
S35
S45
S55
S65
S16
S26
S36
S46
S56
S66
σ1
σ2
σ3
τ4
τ5
τ6
2.0.4
Symmetry of Constitutive Matrix
Strain energy density,
1
U0 = σ i ε i
2
1
U0 = Cij ε j ε i
2
∂U
σ i = 0 = Cij ε j
∂ε i
- - - -(1)
∂ 2U 0
= Cij
∂ε j ∂ε i
Eqn.(1) can be written as
1
U0 = σ j ε j
2
1
U0 = C ji ε i ε j
2
∂U
σ j = 0 = C ji ε i
∂ε j
∂ 2U 0
= C ji
∂ε i∂ε j
Since the order of differentiating a scalar quantity U0 shouldnot
change the result. Therefore, Cij = Cji .Stiffness matrix is symmetric.
Similarly, Sij = Sji
2.1
3-D CONSTITUTIVE EQUATIONS
(a) General Anisotropic Material (no plane of material symmetry).
σ1
ε1
C11 C12 C13 C14 C15 C16
σ2
ε2
C21 C22 C23 C24 C25 C26
σ3
ε3
C31 C32 C33 C34 C35 C36
=
τ4
γ4
C41 C42 C43 C44 C45 C46
τ5
γ5
C51 C52 C53 C54 C55 C56
τ6
γ6
C
C
C
C
C
C
61
62
63
64
65
66
• Number of unknowns = 6x 6 = 36
• Because symmetry of Cij, number of unknowns = 6x 7/ 2 = 21
(b) Specially Orthotropic Materials (3 mutually perpendicular planes of
material symmetry). Reference coordinate system is parallel to the material
coordinate system.
σ1
ε1
C11
σ2
ε2
C21 C22
Sym
σ3
ε3
C31 C32 C33
=
τ4
γ4
0
0
0 C44
τ5
γ5
0
0
0
0
C55
τ6
γ6
0
0
0
0
0
C
66
Number of unknowns = 9
Features
• No interaction between normal stresses (σ1, σ2, σ3) and shear
strains (γ4, γ5, γ6 ). Normal stresses acting along principal material
directions produce only normal strains.
• No interaction between shear stresses (τ4, τ5, τ6) and normal strains
(ε1, ε2, ε3). Shear stresses acting on principal material planes produce
only shear strains.
• No interaction between shear stresses and shear strains on
different planes. That is shear stress acting on a principal plane
produces a shear strain only on that plane.
(c) Transversely Isotropic Material
An orthotropic material is called transversely isotropic when one of
its principal plane is a plane of isotropy. At every point on this plane, the
mechanical properties are the same in all directions.
(2-3): Plane of Isotropy
σ1
σ2
σ3
τ4
τ5
τ6
=
C11
C21 C22
C12 C23
C22
0
0
0
0
0
0
0
0
0
Number of unknowns = 5
C22 − C23
2
0
0
Sym
C55
0
C55
ε1
ε2
ε3
γ4
γ5
γ6
(d) Isotropic Material
A material having infinite number of planes of material symmetry
through a point.
σ 1 C11
σ C
2 12
σ 3 C12
=
τ 4 0
τ 5 0
τ 6 0
where
C11
C12
0
0
0
Sym
C11
0
0
0
C44
0
0
C44
0
C11 − C12
2
Number of unknowns = 2
ε 1
ε
2
ε 3
γ
4
γ 5
C44 γ 6
C44 =
Summary
Material
1. Anisotropic material
2. Anisotropic elastic materials
3. Orthotropic material
4. Orthotropic material with
transverse isotropy
5. Isotropic material
Independent Elastic constants
36
21
9
5
2
2.2 Relations Between Mathematical and Engineering Constants
(a) Isotropic Materials (E & ν)
x2
ε 3 = −νσ 1 / E
σ1
x1
x3
ε 2 = −νσ 1 / E
ε1 = σ 1 / E
Definition:
Elastic Modulus (E) = Stress/Strain = σ1/ε1
Poisson’s Ratio (ν) = - Transverse strain/Applied strain = - ε2
/ε1
x2
ε 3 = −νσ 1 / E
ε 2 = −νσ 1 / E
ε1 = σ 1 / E
x1
x3
Applied Stresses
Normal Strains
σ1
in − x1
σ1 / E
−νσ 1 / E
−νσ 1 / E
in − x2
in − x3
σ2
σ3
−νσ 2 / E
−νσ 3 / E
σ2 / E
−νσ 2 / E
−νσ 3 / E
σ3 / E
Shear stresses
Shear Strains
γ4
γ5
γ6
Planes
x2-x3,
τ 23
τ 23 / G
x3 - x1
τ 31
x1 - x2
τ 12
τ 31 / G
τ 12 / G
x2
Constitutive Equation
σ1
x1
ε i = Sijσ j
ε1 1 E
ε
−ν
2
E
ε 3 −ν E
ε = γ = 0
23
4
ε 5 = γ 31 0
ε = γ
6
12 0
{σ } = [ S]−1{ε }
x3
−ν
E
1
E
−ν
E
−ν
−ν
1
E
0
0
E
0
0
0
0
E
1
0
0
0
0
0
0
0
0
or
G
0
1
G
0
σ1
σ
0
2
σ3
0
σ = τ
0
23
4
0 σ 5 = τ 31
1 σ = τ
12
G 6
0
{σ } = [C ]{ε }
Restrictions of Elastic Constants
Shear modulus
G=
E
2(1 + ν )
for Shear modulus to be positive, ν > - 1
Bulk modulus
K=
E
3(1 − 2ν )
for Bulk modulus to be positive, ν <
−1 < ν < 1/2
1/2
(b) Orthotropic Materials
x2 E2
σ1
ε 3 = −ν13σ 1 / E1
x1 E1
ε 2 = −ν12σ 1 / E1
ε1 = σ 1 / E1
x3 E3
Definition:
Elastic Modulus (E1) = Stress/Strain = σ1/ε1
Poisson’s Ratio (ν12) = - Transverse strain/Applied strain = - ε2
/ε1
x2
ε 3 = −ν13σ 1 / E1
ε 2 = −ν12σ 1 / E1
ε1 = σ 1 / E1
x1
x3
Applied Stresses
Normal Strains
σ1
in − x1
σ 1 / E1
−ν12σ 1 / E1
−ν13σ 1 / E1
in − x2
in − x3
σ3
σ2
−ν 21σ 2 / E2
−ν 31σ 3 / E3
σ 2 / E2
−ν 23σ 2 / E2
−ν 32σ 3 / E3
σ 3 / E3
Shear stresses
Shear Strains
γ4
γ5
γ6
Planes
x2-x3,
τ 23
τ 23 / G23
x3 - x1
τ 31
τ 31 / G31
x1 - x2
τ 12
τ 12 / G12
Constitutive Equation
{ε } = [ S]{σ }
ε1 1 E11
ε
−ν12
2
−ν E11
ε 3 13 E11
ε = γ = 0
23
4
ε 5 = γ 31 0
ε = γ
6
12
0
{σ } = [ S]−1{ε }
−ν 21
1
E22
−ν 23
or
E22
E22
−ν 32
1
E33
0
0
E33
0
0
0
0
G23
0
E33
1
0
0
0
0
0
0
0
0
1
G31
0
σ1
0
σ 2
σ3
0
0 σ 4 = τ 23
σ 5 = τ 31
0
1
σ
τ
=
6
12
G12
0
{σ } = [C ]{ε }
from Symmetry of S- matrix:
S12 = S21
−ν 31
S13 = S31
ν ij Ei
ν ij ν ji
=
=
or
Therefore
Ej
ν
Ei E j
ji
Sij = S ji
when i ≠ j
S23 = S32
ν12 ν 21 ν13 ν 31 , and ν 23 = ν 32
,
=
=
That is
E2
E3
E1 E3
E1 E2
This is the well known Betti’s reciprocal law of orthotropic material properties.
Stress-Strain Equation
{σ } = [C ]{ε }
Where [C ] = [ S]−1
Coefficients of C are given by:
C11 =
1−ν 23ν 32
E2 E3 ∆
C12 =
ν 21 +ν13ν 23
E2 E3 ∆
=
ν12 +ν13ν 32
E1 E3 ∆
C22 =
1−ν13ν 31
E1 E3 ∆
C23 =
ν 32 +ν12ν 31
E1 E3 ∆
=
ν 23 +ν 21ν 31
E1 E2 ∆
C33 =
1−ν12ν 21
E1 E2 ∆
C13 =
ν13 +ν12ν 23
E1 E2 ∆
=
ν 31 +ν 21ν 32
E2 E3 ∆
C44 = G23 ,
Where
∆=
1
E1 E2 E3
C55 = G13 ,
1
−ν12
−ν13
−ν 21
1
−ν 23
and
−ν 31
−ν 32
1
C66 = G12
Transversely Isotropic Material ( Plane : x2 − x3 )
E2 = E3
G12 = G13
ν12 = ν13
G23 =
E2
2(1 + ν 23 )
Restrictions on Elastic Constants of Orthotropic Materials
From Energy Principles, Lempriere showed that the Strain Energy is Positive
if the Stiffness and Compliance Matrices are Positive Definite.
Mathematical Argument
(a) If only one stress is applied at a time, then the work done is positive
if and only when the corresponding direct strain is positive. That is when
Sii > 0
Therefore: E1 , E2 , E3 , G12 , G23 , and G13 > 0
(b) Under suitable constraints, it is possible to deform a body in one-direction.
Then the work done will be positive if only when Cii > 0
C11 =
1 − ν 23ν 32
E2 E3 ∆
1 − ν 23ν 32 > 0
>0
or ν 23ν 32 < 1
or
In general
ν 23 <
E2
E3
ν ij <
Ei
Ej
Note all through ∆ was assumed to be greater than 0. This condition
would give additional equations. (refer to R. M. Jones.)
2.3 Constitutive Equations of a Thin Orthotropic Lamina
Two-Dimensional Bodies: Variation in stress and strain can be defined
by two-coordinates.
There are two types of problems.
(a) Plane strain - Thick bodies
ε z = γ xz = γ yz = 0
∴ τ xz = τ yz = 0
(b) Plane Stress - Thin bodies
σ z = τ xz = τ yz = 0
∴ ε z = γ xz = γ yz = 0
x2 , y, v
x3 , z, w
x1, x, u
Strain-Stress Equation:
ε1 S11 S12 0 σ 1
ε 2 = S21 S22 0 σ 2
γ 0
0 S66 σ 12
12
x2 , y, v
x3 , z, w
Or
1
ε
1 E1
−ν12
ε
=
2
E1
γ
12 0
x1, x, u
−ν12
E1
1
E2
0
0 σ
1
0 σ 2
1 σ
G12 12
Stress -Strain Equation:
σ 1 Q11 Q12
σ 2 = Q21 Q22
σ 0
0
12
0 ε1
0 ε2
Q66 γ 12
E
Where: E1′ = 1−ν121ν 21
Or
σ 1 E1′
′
σ 2 = E12
σ 0
12
E2
12ν 21
E2′ = 1−ν
E12
′
E2′
0
0 ε1
0 ε2
G12 γ 12
ν E
ν E2
12ν 21
E12
′ = 1−ν21 ν1 = 1−ν12
12 21
2.4 Stress-Strain Relations for Arbitrary Orientation of a Lamina
y
(a) Transformation of coordinates
P(x,y)
x1 − x2 - Material coordinate system
x−y
- Reference coordinate system
x
y
Consider a point P(x,y), its coordinates in
x1 − x2 system is
x1 = xCosθ + ySinθ
x2
P(x,y)
x
x1
y
θ
x2 = − xSinθ + yCosθ
x2
or
x1 Cosθ
=
x2 − Sinθ
x1
Sinθ x
Cosθ y
x1 α1x
or x = α 2 x
2
Direction cosine matrix
α1 y x
α 2 y y
α ij where I = 1,2 and j = 1, 2
x
(b) Stress Transformation
We use tensors transfer stresses between the two coordinate systems
σ ij = α ikα jlσ kl
i, j = 1, 2 and
k , l = x, y
Example: i=j=1
σ 11 = α11α11σ xx + α11α12σ xy + α12α11σ yx + α12α12σ yy
If m = Cosθ and n = Sinθ Then
σ 11 = m 2σ xx + 2 mnσ xy + n 2σ yy
Similarly we can establish the other two stress components. Finally we can write
2
2 mn σ xx
n2
σ 11 m
2
m 2 −2 mn σ yy
σ 22 = n
σ − mn mn m 2 − n 2 σ
12
xy
{σ } x1 − x2 = [T ]{σ } x − y
or
{σ } x − y = [Tσ ]{σ } x1 − x2
[Tσ ]
where
[Tσ ] = [T ]−1
- is the stress transformation matrix.
m 2 n2
−2 mn
[Tσ ] = [T ]−1 = [T (−θ )] = n2 m2 2 mn
mn − mn m 2 − n 2
(c) Strain Transformation
{ ε } x− yTen = [ Tσ ]{ ε } x1 − x2Ten
{ ε } x− yTen
0 ε11
0 ε 22
1 γ
2 12 Eng
1 0
= [ Tσ ] 0 1
0 0
{ ε } x− yTen = [ Tσ ] [ H ]{ ε } x − x Eng
1
2
{ ε } x− yEng = [ H ] −1 [ Tσ ] [ H ]{ ε } x − x Eng
1
{ ε } x− yEng = [ Tε ]{ ε } x − x Eng
1
2
1 0 0
[ H ] −1 = 0 1 0
0 0 2
2
Where strain transformation matrix is:
n2
− mn
m2
mn
[ Tε ] = n2 m2
2 mn −2 mn m 2 − n 2
(d) Stiffness Transformation
Let
{σ} xy = [Q] xy {ε} xy
in x - y coordinate system
Let us start with stress equation
{σ} xy = [Tσ ] xy {σ}1− 2
= [Tσ ] xy [Q]1− 2 {ε}1− 2
{σ} xy = [Tσ ][Q]1− 2 [Tε ]−1 {ε} xy
{σ} xy = [Tσ ][Q]1− 2 [Tσ ]T {ε} xy
[Q] xy = [Tσ ][Q]1− 2 [Tσ ]T
{σ}1− 2 = [Q]1− 2 {ε}1− 2
{ε}1− 2 = [Tε ]−1 {ε} xy
Qxx
Qyx
Qsx
Qxy
Qyy
Qsy
Qxs
Q11
Qyx = [Tσ ]Q12
Qss
0
where
Q11 =
E11
1 − ν12 ν21
Q22 =
E22
1 − ν12 ν21
Q12 =
ν12 E22
ν21 E11
=
1 − ν12 ν21 1 − ν12 ν21
Q66 = G12
Q21
Q22
0
0
T
0 [Tσ ]
Q66
Elements pf [Q]xy matrix
Qxx = m 4 Q11 + n 4 Q22 + 2 m 2 n 2 Q12 + 4 m 2 n 2 Q66
Qyy = n 4 Q11 + m 4 Q22 + 2 m 2 n 2 Q12 + 4 m 2 n 2 Q66
(
)
Qxy = m 2 n 2 Q11 + m 2 n 2 Q22 + m 4 + n 4 Q12 − 4 m 2 n 2 Q66
(
)
(
)
Qys = mn 3Q11 − m 3 nQ22 + ( m 3 n − mn 3 )Q12 + 2( m 3 n − mn 3 )Q66
2
Qss = m 2 n 2 Q11 + m 2 n 2 Q22 − 2 m 2 n 2 Q12 + ( m 2 − n 2 ) Q66
Qxs = m 3 nQ11 − mn 3Q22 + mn 3 − m 3 n Q12 + 2 mn 3 − m 3 n Q66
Notice in the [Q] xy matrix
•
•
It is fully populated - means normal-shear coupling.
Although 4 independent constants were used; we have ‘6’ unknowns.
(e) Compliance Matrix
{ε } xy = [Tε ]{ε } x 1 − x 2
= [Tε ][ S] x 1 − x 2 {σ } x 1 − x 2
−1
{ε } xy = [Tε ][ S] x 1 − x 2 [Tσ ] {σ } x − y
{ε } xy = [ S] x − y {σ } x − y
ε x Sxx
ε y = Syx
γ S
xy sx
Sxy
Syy
Ssy
where
Sxs σ xx
Sys σ yy
Sss σ xy
T
[ S] x − y = [Tε ][ S]1− 2 [Tε ]
S xx = m 4 S11 + n 4 S22 + 2 m 2 n 2 S12 + m 2 n 2 S66
Syy = n 4 S11 + m 4 S22 + 2 m 2 n 2 S12 + m 2 n 2 S66
(
)
S xy = m 2 n 2 S11 + m 2 n 2 S22 + m 4 + n 4 S12 − m 2 n 2 S66
(
)
(
(
)
(
)
S xs = 2 m 3 nS11 − 2 mn 3 S22 + 2 mn 3 − m 3 n S12 + mn 3 − m 3 n S66
)
Sys = 2 mn 3 S11 − 2 m 3 nS22 + 2 m 3 n − mn 3 S12 + m 3 n − mn 3 S66
(
Sss = 4 m 2 n 2 S11 + 4 m 2 n 2 S22 − 8m 2 n 2 S12 + m 2 − n 2
)
2
S66
2.5 Engineering Constants of an Arbitrarily Oriented Laminate
Arbitrarily Oriented Lamina
Let us examine what happens when you apply σx in x direction.
We get ...
y
εx
- in x
εy
- in y
εy
and shear strain,
σ
Ex = x
εx
ν xy = −
or
εy
εx
γ xy
γ xy
σ
εx = x
Ex
θ
x
ε y = − ν xy ε x = −
εx
Shear coupling coefficient
or
γ xy
ν xy
Ex
ηxs =
σx
γ xy
εx
η
= ηxs ε x = xs σ x
Ex
∴
Sxx =
1
Ex
Syx = −
Ssx =
ν xy
Ex
ηxs
Ex
Ex =
1
Sxx
ν xy = − Syx E x
ηxs = Ssx E x
Shear Coupling Coefficients:
Sxx =
1
Ex
Syx = −
Ssx =
Ex =
ν xy
ν xy = − Syx E x
Ex
ηxs
Ex
1
ε x Ex
ν xy
ε y = −
γ E x
xy η
xs
E
x
1
Sxx
ηxs = Ssx E x
ηxs ->Ratio of shear strain γxy
to normal strain εx due to
applied σx.
ηsx ->Ratio of normal strain εx
to shear strain γxy due to
applied τxy.
Similarly we have: ηys, ηsy
−
ν yx
Ey
1
Ey
η ys
Ey
ηsx
Gxy
σ xx
ηsy
σ yy
Gxy
σ
xy
1
Gxy
Engineering Constants of an Arbitrarily Oriented Lamina
(
)
(
)
(
)
m2
n2 2
m2n2
1
2
2
2
m − n ν12 +
n − m ν21 +
=
Ex
E1
E2
G12
(
)
2 2
(
n2 2
m2
m2n2
1
2
2
2
n − m ν12 +
m − n ν21 +
=
E y E1
E2
G12
2 2
1
4m n
=
Gxy
E1
ν xy
ν yx
(1 + ν12 ) +
(
4m n
E2
(1 + ν21 ) +
(
)
m2 − n2
)
2
G12
)
m2
n2 2
m2n2
2
2
2
=
=
m ν12 − n +
n ν21 − m +
Ex
Ey
E1
E2
G12
(
)
(
)
3
3
−
mn
m
n
ηsx ηxs 2 mn 2
2
mn
2
2
2
=
=
m − n ν12 −
n − m ν21 +
G12 E x
E1
E2
G12
(
ηsy
G12
)
(
)
3
3
m
n
mn
−
2 mn 2
2
mn
=
=
n − m 2 ν12 −
m 2 − n 2 ν21 +
Ey
E1
E2
G12
ηys
(
)
(
)
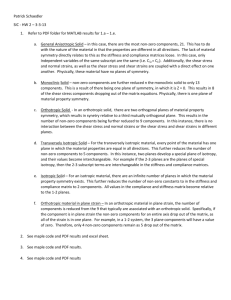
Variation of Ex and Ey with Fiber Angle
Material: E1 = 10E2 & G12=0.45 E2
ν12=0.35 and E2 = 2 Msi
12
10
8
Ey
E2
Ex
E2
6
4
2
0
0
10
20
30
40
Angle
50
θ
60
70
80
90
Variation of Gxy with Fiber Angle
1
0.8
Gxy
E2
0.6
0.4
0.2
0
0
10
20
30
40
50
Angle
θ
60
70
80
90
Variation ofν xy with Fiber Angle
0.6
0.5
ν xy
0.4
0.3
0.2
0.1
0
0
15
30
45
Angle
60
θ
75
90
Variation of η xs and η ys with Fiber Angle
0.5
0
ηys
-0.5
-1
ηxs
-1.5
-2
-2.5
0
15
30
45
Angle
60
θ
75
90
Engineering Constants of a Laminate
• N-Layers
• Each Layer can have different
Thickness, Orientation, and Material
N
T = ∑ ti
i =1
Stress-Strain in ith Layer
{σ }av = T1 ∫ [C]dz{ε }
{σ }i = [C ]i {ε }i
Assumption: Strain is constant through out the laminate
Average Stress in the laminate is: {σ }av = ∫ [C ] dzt {ε }
N
= ∑ [C ]i ti {ε }
i =1
= [C ]av {ε }
or {ε }av = [ S ]x − y {σ }av
1
T
{σ }av
For 3-D model stress-strain are six
For 2-D model stress-strain are three
Engineering Constants are:
S
Gyz =
v1
S44
ν xy = − Syx
1
Syy
Gxz =
v1
S55
ν xz = − S zx
1
Szz
Gxy =
v1
S66
ν yz = − S zy
Ex =
1
S xx
Ey =
Ez =
MmLamCode:
mmTEXlam:
xx
S
xx
S
yy
micromechanics and laminate analysis unidirectional code
micro and laminate analysis of textile fabric composite code
2.6 Hygrothermal Coefficients of a Lamina
2.6.1 Coefficients of Thermal Expansion
(a) Isotropic Materials
y
Original
b’
b
x
l
l’
Expanded due to ∆T
T
T
T
Coefficient of thermal expansion, α x = α y = α =
Units: in/in/oF or m/m /oC
l' −l
l∆T
(B) Orthotropic Materials
x2
Deformed
b’
b
x1
l
l’
Original
Coefficient of thermal expansion
T
l' − l
In x1-direction α1 = l∆T
In x2-direction
α1T
Thermal strains: {ε } = α 2T ∆T
0
α 2T =
b' − b
b∆T
2.6.2 Coefficients of Moisture Expansion
All organic composites absorbs moisture. The absorption depends on the relative
humidity to which it is exposed and its moisture content. For a given RH, temperature, and atmospheric pressure
composite will have a saturation value. This is moisture content that the material will reach, if it is exposed
for a very long time. This is a fixed value for a material. The moisture content is expressed as percent change
in weight of the material. Like thermal expansion,increase in moisture would also expands the material.
The orthotropic materials have two coefficients of moisture expansion, one along the fiber and the other
across the fiber.
x2
Deformed
Change in moisture ∆Μ
b’
b
x1
l
l’
Original
Coefficient of moisture expansion
In x1-direction β1T = ll∆' −Ml
In x2-direction
β2T
=
b' − b
b∆M
{ }
Moisture strains: ε M
β1M
= β2M ∆M
0
2.6.3
x2
Coefficients of Thermal & Moisture Expansion
for Lamina in Arbitrary Orientation
y
x1
Recall the strain transformation:
{ε T }xy = [Tε ]{ε T }1− 2
x
Where
m2
n2
− mn
2
2
T
=
n
m
mn
[ ε]
2
2
2 mn −2 mn m − n
m=cosθ and n=sinθ
Thermal strains in x-y due to ∆T are:
ε x m2
− mn α1T
n2
2
m2
mn α 2T ∆T
εy = n
γ 2 mn −2 mn m 2 − n 2 0
xy
α xT
= α yT
α T
xy
Coefficients of thermal expansion in x-y:
α xT = m 2α1T + n 2α 2T
α yT = n 2α1T + m 2α 2T
T
α xy
= 2 mn(α1T − α 2T )
Coefficients of thermal expansion in x-y:
α xT = m 2α1T + n 2α 2T
α yT = n 2α1T + m 2α 2T
T
α xy
= 2 mn(α1T − α 2T )
Coefficients of moisture expansion in x-y:
β xM = m 2 β1M + n 2 β2M
β yM = n 2 β1M + m 2 β2M
M
β xy
= 2 mn( β1M − β2M )
Summary
2.0 Introduction
• Equations of Motion
• Symmetric of Stresses
• Tensorial and Engineering Strains
• Symmetry of Constitutive Equations
2.1 Three-Dimensional Constitutive Equations
• General Anisotropic Materials
• Orthotropic Materials
• Transversely Isotropic Materials
• Isotropic Materials
2.2 Relation Between Mathematical & Engineering Constants
• Isotropic Materials
• Orthotropic Materials
2.3 Constitutive Equations for an Orthotropic Lamina
• Plane Strain Condition
• Plane Stress Condition
2.4 Constitutive Equations for an Arbitrarily Oriented Lamina
• Coordinate Transformation
• Stress Transformation
• Strain Transformation
• Stiffness and Compliance Matrix Transformation
2.5 Engineering Constants of a Laminate
• Lamina
• Laminate
2.6 Hygrothermal Coefficients of a Lamina