MATH35032: Mathematical Biology Solutions to Problem Set 1
advertisement

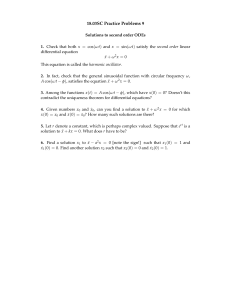
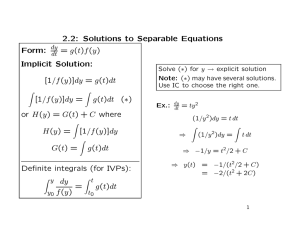
MATH35032: Mathematical Biology Solutions to Problem Set 1 These solutions, as well as the corresponding problems, are available at http://bit.ly/MancMathBio. (1) This problem is, in part, an exercise in ignoring irrelevant information and dealing with uncertainty. We are not given sufficient detail to write down exact expressions for the fish population: we don’t know what fraction of the 435 fish used to stock the Bay were planted in 1879 and what fraction arrived in 1881. Nor do we know when, during 1899, the 560,000 kg of bass were caught. The thing that makes the problem tractable is that we are asked for a lower bound on the growth rate r: whenever we need to make an assumption we should just assume whatever gives rise to the lowest estimated growth rate. Before engaging with the problem of multiple stocking and harvesting events, let’s consider the simpler case where N0 fish are dropped into the Bay at some time T0 and then allowed to grow. Given that the population obeys Malthusian growth dN/dt = rN (1.1) we know that the solution is N(t) = N0 er(t−T0 ) and so if we are also told that at some later time T1 > T0 the population has increased to a size N(T1 ) = N1 we can solve for the growth rate: N(T1 ) = N1 = N0 er(T1 −T0 ) =⇒ r= ln(N1 /N0 ) . T1 − T0 (1.2) Notice that the estimate for r: • decreases if we increase N0 ; • decreases if we decrease N1 ; • decreases if we lengthen the time interval (T1 − T0 ). Thus you might expect that we’d get the lowest estimated growth rate if we assumed that all 435 fish went into the Bay at the earliest possible date (1, Jan. 1879) and that they stayed there, growing steadily, until the last possible minute (31 Dec. 1899). This means that the fish grow for (1899 − 1879) + 1 = 21 years. We’re told to assume that the average bass weighs 1.5 kg so the total 560,000 kg catch in 1899 amounts to around 373333.3 fish and implies a total population of N1 ≈ 3733333. This implies a growth rate r≈ ln(3733333/435) = 0.431/yr. 21 100 Fish 80 60 40 20 0.5 1.0 1.5 2.0 Time Figure 1: The blue curve shows the fish population resulting from releasing two equally-sized batches of n1 = n2 = 10 fish at times τ1 = 0 and τ2 = 1: here r = 1. The dashed orange curve illustrates the point that these two releases give results equivalent (for times t ≥ τ2 ) to a single release of a smaller total number of fish at time zero. The extremely cautious reader might prefer to do something more formal to establish that this really is a lower bound. First consider the consequences of multiple releases. Suppose that the fish are released in k batches, with, say n1 released at τ1 = 0, and a further n2 at time τ2 > τ1 and another lot of n3 at τ3 > τ2 and so on, up to nk at τk . If, for the moment, we ignore any harvesting of the fish and just concentrate on their growth, the linearity of (1.1) means that the solution looks like 0 If t < 0 rt If 0 ≤ t < τ2 n1 ert r(t−τ2 ) n e + n e If τ2 ≤ t < τ3 1 2 N(t) = . .. .. . Pk n er(t−τj ) If τk ≤ t j=1 j In words, this says that every time we release a new batch of fish they just add to the total, which continues to grow exponentially at rate r. Now focus on the period just after the second release, τ2 ≤ t < τ3 . Here we have N(t) = n1 ert + n2 er(t−τ2 ) = n1 + n2 e−rτ2 ert ≡ n′ ert where n′ ≡ (n1 + n2 e−rτ2 ) is a constant that depends on the nj and τj . But the last line above is precisely the population that we’d have if we had made only a single release of n′ fish at time zero. And—as we know that e−rτ2 < 1—it’s easy to see that n′ < (n1 + n2 ). Figure 1 illustrates this graphically. After considering the example above, it’s not hard to prove (say, by induction on the number of releases) that if we make a series of k releases as described above, the fish population will eventually behave as though we had released a single batch of k k X X n′ = nj e−rτk ≤ nj j=1 j=1 at time zero. Bearing in mind the observations following (1.2) above, it’s clear that we’ll get the lowest estimated growth rate if we imagine all the fish were released at the earliest possible date. The problem of multiple harvesting events is somewhat trickier. We can work out the total size of the catch (as a number of fish) and we are told to consider this number to be 10% of the total population. But when is this true? If we assume that it’s at the end of 1899 we simultaneously increase the value of (T1 − T0 ) and decrease the value of N(T1 ), thus reducing our estimate for r. (2) The problem asks about increases in N(t) in successive time intervals of equal duration, so let’s define tj = j × h for j ≥ 0 ∈ Z, where h is the duration of the intervals. If the population is undergoing Malthusian growth we know N(t) = N0 ert and so N(tj ) = N0 erjh . The increase in population during the j-th interval is then where A0 = N0 to show. N(tj ) − N(tj−1 ) = N0 erjh − N0 er(j−1)h = N0 1 − e−rh erjh = A0 λj 1 − e−rh and λ = erh . But this is just what the problem asked us (3) The problem asks you to “verify” that N(t) = N0 ert (1 − (N0 /K)(1 − ert )) (3.1) is a solution to the logistic growth law dN = rN dt N 1− K (3.2) with the initial condition N(0) = N0 . This means that you should do two things: firstly, take the expression for N(t) in (3.1) and show that N(0) = N0 then, secondly substitute N(t) into the ODE (3.2) and show that the right and left hand sides are, indeed, equal. The first part is the easier of the two: N0 N0 e0 = = N0 N(0) = 0 (1 − (N0 /K)(1 − e )) 1 − (N0 /K)(1 − 1) The second part is slightly more involved: N0 ert d dN(t) = dt dt (1 − (N0 /K)(1 − ert )) r(N0 /K)ert × N0 ert rN0 ert − (1 − (N0 /K)(1 − ert )) (1 − (N0 /K)(1 − ert ))2 (N0 /K)ert N0 ert 1− = r (1 − (N0 /K)(1 − ert )) (1 − (N0 /K)(1 − ert )) 1 N0 ert = rN(t) 1 − K (1 − (N0 /K)(1 − ert )) = = rN(t) [1 − (N(t)/K)] (4) This lovely problem comes from Martin Braun’s Differential Equations and Their Applications. (a) If we neglect the quadratic term in the logistic growth law we are left with Malthusian growth dN = rN dt which has the solution N(t) = N0 ert . Taking N0 = N(0) = q and looking for the time T1 at which N(t) = Q leads to T1 = ln (Q/q) r (b) If we neglect the linear term the growth law reduces to dN −rN 2 = dt αK This is a separable ODE, so we can solve it by noting −r 1 dN = N 2 dt αK and then integrating both sides with respect to t over the interval during which N(t) falls from Q to q: Z T2 Z T2 1 dN r −rT2 dt = − dt = . 2 N dt αK αK 0 0 To handle the right side we change the variable of integration from t to N(t) to get Z 0 T2 1 dN dt = N 2 dt Z N (T2 ) N (0) 1 dN = N2 1 − N q Q = 1 1 − Q q = q−Q qQ Mouse population controlled by periodic epidemics Q 200 000 Mice 100 000 q 5 10 15 Time (years) Figure 2: The blue trace, which starts with initial value N(0) = q/2, shows an exact solution to the piecewise logistic dynamics while the reddish curve shows the (surprisingly good) approximation given by ignoring birth during collapses and the quadratic term during recoveries. Note that the approximate curve begins at first peak of the exact solution. The parameters are: K = 4 × 106 , Q = 2.5 × 105 , α = 0.0003, q = Q/50. With these choices and an approximate recovery time of 4 years one finds r ≈ 0.98/yr. Putting these results together −rT2 q−Q = αK qQ or αK T2 = r Q−q qQ (c) Figure 2 shows both an approximate solution produced by piecing together the kinds of collapse and recovery phases analysed in parts (a) and (b) and an exact solution based on (3.1), the full solution to the logistic equation. With the parameters used here a crash takes just 12.5 weeks. (d) The last part says: if Q/q = 50 and T1 = 4 years, what is the growth rate r? From part (a) we have T1 ≈ ln(Q/q)/r so r ≈ ln (50) ln (Q/q) ≈ ≈ 0.978/ year. T1 4 years Note that this implies that during the recovery phase the mouse population doubles approximately every 8.5 months. (5) The aim of this problem was to get you to work through your notes about linear stability of differential delay equations. (a) Figure 3 shows a few examples of the curve. Note that all versions go through the points (0, 1) and (1, 0), but that if z ≪ 1 the function is nearly zero for most of the interval 0 < (N/K) < 1 while if z ≫ 1 the reverse is true: f (N/K) ≈ 1 for most 0 < (N/K) < 1. 1.0 1 - (N/K)z z = 10 0.8 0.6 z=1 0.4 z = 0.1 0.2 0.2 0.4 0.6 0.8 1.0 (N/K) Figure 3: The function f (N) = 1 − (N/K)z for various values of z. (b) Constant, steady-state solutions N(t) = N⋆ satisfy z dN(t) N⋆ = 0 = −ρN⋆ + ρN⋆ 1 + q 1 − dt K and the only solutions are N⋆ = 0 and N⋆ = K. (c) To find the linearization around N(t) = K, think of dN/dt as a function of two variables, dN(t) = f (N(t), N(t − T )) dt z N(t − T ) . = −ρN(t) + ρN(t − T ) 1 + q 1 − K and make a multi-dimensional Taylor expansion: f (N⋆ + n(t), N⋆ + n(t − T )) ≈ f (N⋆ ) + ∂1 f |(N⋆ ,N⋆ ) n(t) + ∂2 f |(N⋆ ,N⋆ ) n(t − T ) = 0 + ∂1 f |(N⋆ ,N⋆ ) n(t) + ∂2 f |(N⋆ ,N⋆ ) n(t − T ) (5.1) The partial derivatives are and ∂1 f = −ρ z N(t − T ) ∂2 f = ρ 1 + q 1 − K z−1 z N(t − T ) −ρqN(t − T ) K K and, by evaluating them at N(t) = N⋆ = K and substituting into (5.1) one obtains the linearized equation dn(t) d (N⋆ + n(t)) = ≈ −ρn(t) + ρ(1 − qz)n(t − T ). dt dt (5.2) (d) Substituting n(t) = n0 exp(λt) into (5.2) yields dn(t) = λn0 eλt = −ρn0 eλt + ρ(1 − qz)n0 eλ(t−T ) dt and, after dividing away the common factors of n0 exp(λt), we obtain λ = −ρ + ρ(1 − qz)e−λT . If we decompose λ into real and imaginary parts λ = µ + iω we get two equations: µ = −ρ − ρ(qz − 1)e−µT cos(ωT ) ω = ρ(qz − 1)e−µT sin(ωT ) (5.3) (e) Consider the first of the equations (5.3) above and rewrite it as µ = −ρ 1 + (qz − 1)e−µT cos(ωT ) . As we know that ρ > 0, the right side of this expression will be negative (and so µ will be negative too) unless 1 + (qz − 1)e−µT cos(ωT ) < 0. And the only way this can happen with µ > 0 is if both cos(ωT ) < 0 and (qz − 1) > 1. Thus, as requested, we have shown that if (qz − 1) < 1 the system is stable (µ < 0) for all delays. Now if we are interested in Tc , the delay at which oscillatory instability first appears, we should set T = Tc and µ = 0 in equations (5.3) and try to solve them. This leads to 0 = −ρ − ρ(qz − 1) cos(ωTc ) ω = ρ(qz − 1) sin(ωTc ). (5.4) Focusing attention on the first of the two, we find − cos(ωTc ) = 1 qz − 1 or ωTc = cos−1 (−1/b) (5.5) where b = (qz − 1). Note that this implies that cos(ωTc ) < 0 and so π/2 < ωTc ≤ π. Using the observations above we can conclude that sin(ωTc ) > 0 and so r p 1 sin(ωTc ) = 1 − cos2 (ωTc ) = 1 − 2 b and thus, from the second of equations (5.4) r ω = ρb sin(ωTc ) = ρb 1 − √ 1 = ρ b2 − 1. b2 (5.6) Finally, combining (5.5) with (5.6), we get Tc = cos−1 (−1/b)/ω = π − cos−1 (1/b) cos−1 (−1/b) √ √ = ρ b2 − 1 ρ b2 − 1 (5.7) where, to obtain the last equality, I used the identity cos−1 (−x) = π −cos−1 (x) for x > 0. (f) This last part of the problem asks us to find the period of the unstable oscillation for the case T − Tc = ε with ε ≪ 1. We could do this by putting T = Tc + ε into the equations (5.3), then expand them in ε and solve for the first non-vanishing terms . . . . But we don’t really √ need to: we’d find that µ ∼ O(ε) and, following from (5.6), that ω ∼ ρ b2 − 1 + O(ε). This means that the period is 2π 2π = √ . ω ρ b2 − 1 dρ /dt 0.2 0.4 0.6 0.8 1.0 ρ Figure 4: The polynomial from the right-hand side √ of (6.1). The dotted red lines show the minimum and maximum values, ±α/(12 3), while the blue dots on the ρ axis show the equilibrium points and the arrows indicate their stability: if ρ0 < 1/2 then ρ(t) decreases monotonically, tending asymptotically to zero, while if ρ0 > 1/2 then ρ(t) increases monotonically toward the equilibrium at ρ = 1. (6) This question is about a model for the evolution of the direction of shell-coiling in snails. If we say that ρ is the fraction of left-coiling snails, then Taubes proposes that dρ = αρ(1 − ρ) (ρ − 1/2) . (6.1) dt (a) The first part of the problem asks you to find the equilibria—those points where dρ/dt = 0—and to classify their stability. The roots of the cubic polynomial in (6.1) are clearly ρ = 0, 1/2 and 1. As for stability, Figure 4 shows that the equilibria at 0 and 1 are stable, while the one at ρ = 1/2 is not. The scrupulous reader may wish to do a linear stability analysis, but it’s clear that 0 If ρ(t = 0) < 1/2 lim ρ(t) = 1 If ρ(t = 0) > 1/2 t→∞ Further, any small deviation from the equilibrium at ρ = 1/2 will grow, leading to a population that coils in only one direction. (b) Begin by introducing some notation: say that the number of right-coiling snails is R(t) and the number of left-coiling ones is L(t), so that the total population, N(t), is given by N(t) = R(t) + L(t). Finally, say that the fraction of leftcoiling snails is ρ(t). Then ρ(t) = L(t) L(t) = . N(t) R(t) + L(t) We’re told that in a short time interval ∆t a fraction β∆t of the snails choose a select a mate at random and reproduce, generating m new snails as offspring. Because of the random mate choice, a left-coiling snail will mate with a leftcoiling partner a fraction ρ(t) of the time and with a right-coiling partner a fraction (1 − ρ(t)) of the time. This implies L(t + ∆t) = L(t) + (β∆t)L(t) × [mρ(t) + (m/2)(1 − ρ(t))] where the first term in the square brackets represents the m left-coiling offspring produced from a left-left mating, while the second term accounts for the m/2 left-coiling offspring of a left-right mating. Converting the expression above into an ODE in the usual way yields L(t + ∆t) − L(t) = (β∆t)L(t) × [mρ(t) + (m/2)(1 − ρ(t))] L(t + ∆t) − L(t) = (βm)L(t) [ρ(t) + (1 − ρ(t))/2] ∆t dL ρ+1 or = αL dt 2 (6.2) where α = βm is the sole parameter of the model. Similar reasoning produces an equation for R(t) as well: R(t + ∆t) − R(t) = (β∆t)R(t) × [m(1 − ρ(t)) + (m/2)ρ(t)] R(t + ∆t) − R(t) ρ(t) = (βm)R(t) × 1 − ∆t 2 2−ρ dR . = αR or dt 2 (6.3) And finally, by combining the results above we can get an ODE for the temporal evolution of, ρ, the fraction of left-coiling snails: L d dρ = dt dt R + L dL dR dL −L + (R + L) dt dt dt = (R + L)2 ρ+1 2−ρ − L αL + αR (R + L)αL ρ+1 2 2 2 = (R + L)2 + αL2 ρ+1 − αL2 ρ+1 − αLR 2−ρ αRL ρ+1 2 2 2 2 = (R + L)2 − 2−ρ αLR ρ+1 2 2 = (R + L)2 L R 2ρ − 1 = α R+L R+L 2 = αρ(1 − ρ)(ρ − 1/2). The last line is just the same as (6.1), the thing we were asked to show. Afterword: Although the argument above does produce Taubes’s equation for dρ/dt, the model embodied in Eqns (6.2) and (6.3) has serious ecological deficiencies: the right-hand sides of both equations are always strictly positive and so both R(t) and L(t) increase without bound. One way to repair this problem is to follow the reasoning used when we developed the logistic population model out of the Malthusian one, replacing the growth rate α by something that depends on N(t), say α(1 − (N/K)), where, as usually, K is the carrying capacity of the environment. Then the ODEs for R(t) and L(t) become dR ρ+1 2−ρ N N dL L and R =α 1− =α 1− dt K 2 dt K 2 and the corresponding ODE for ρ is dρ N ρ(1 − ρ)(ρ − 1/2). =α 1− dt K which differs from Taubes’s (6.1). As a further exercise, you might try to find models where dR/dt and dL/dt are: i) consistent with Taubes’s assumptions, ii) lead to the form (6.1) for dρ/dt and iii) have a stable, non-zero equilibrium for the total population N(t).