Low-Noise Amplifier Design and Optimization
advertisement

2008:230 CIV
MASTER'S THESIS
Low-Noise Amplifier Design
and Optimization
Marcus Edwall
Luleå University of Technology
MSc Programmes in Engineering
Electrical Engineering
Department of Computer Science and Electrical Engineering
Division of EISLAB
2008:230 CIV - ISSN: 1402-1617 - ISRN: LTU-EX--08/230--SE
A BSTRACT
Low-Noise Amplifiers are key components in the receiving end of nearly every communications system. The wanted input signal of these systems is usually very weak and the
primary purpose of the LNA is consequently to amplify the signal while at the same time
adding as little additional noise as possible. Its performance is measured in a number
of figures of merit among which gain and noise figure are most notable while dynamic
range, return loss and stability are examples of others.
In May 2005 a four year design study entitled EISCAT 3D was initialized. Its purpose
was to investigate the feasibility of a next-generation incoherent scatter radar system.
One of the responsibilities of EISLAB at Luleå University of Technology is to design a
receiver front-end, which include an LNA with extremely high performance requirements.
For that reason a MATLAB Particle Swarm Optimization implementation was developed
to iteratively find a solution to optimal component values for a user definable LNA
topology.
In this master’s thesis, the radio frequency concepts essential to traditional LNA design
as well as the design procedure itself are explained. A description to the optimizer is
then given, including a chapter on 2-port noise calculations.
With the objective to find an LNA design with even higher performance than the
previously designed EISCAT 3D LNA, four topologies are evaluated using the optimizer
while consistently targeting the EISCAT 3D specifications. These topologies include the
original reference design and one that employs the inductive source degeneration design
technique. The latter showed significantly improved performance with an approximate 2
dB gain increase and 0.1 dB noise figure reduction while still maintaining the return loss
and stability requirements.
iii
P REFACE
This master’s thesis was carried out at the Embedded Internet Systems Laboratory (EISLAB), Department of Computer Science and Electrical Engineering, Luleå University of
Technology and was descendant to the EISCAT 3D design study.
Among the people that I would like to thank for their contribution to my master’s thesis
are Dr. Jonny Johansson for his encouragement and insightful help, and my supervisor,
Ph.D. student Johan Borg for his invaluable expertise.
On a personal level, I wish to express gratitude to family and friends who have supported me throughout this journey.
Marcus Edwall
v
C ONTENTS
Chapter 1: Introduction
1
Chapter 2: Radio Frequency Concepts
2.1 Reflection . . . . . . . . . . . . . . .
2.2 Scattering Parameters . . . . . . . .
2.3 The Smith Chart . . . . . . . . . . .
2.4 The Quality Factor . . . . . . . . . .
2.5 Impedance Transformation . . . . . .
.
.
.
.
.
3
3
5
6
7
7
.
.
.
.
.
.
.
9
9
14
15
15
17
17
19
Chapter 4: 2-ports and Noise
4.1 Method of Linear 2-port Noise Analysis . . . . . . . . . . . . . . . . . . .
23
23
Chapter 5: The Optimizer
5.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Notable functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
27
28
28
Chapter 6: LNA Topology Evaluation
6.1 Circuit 1: Original . . . . . . . . . . . .
6.2 Circuit 2: Simplified . . . . . . . . . . .
6.3 Circuit 3: Without Feedback . . . . . . .
6.4 Circuit 4: Inductive Source Degeneration
31
32
32
33
34
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Chapter 3: Low-Noise Amplifier Design Strategy
3.1 Target Specifications . . . . . . . . . . . . . . . .
3.2 Active Device Selection . . . . . . . . . . . . . . .
3.3 DC Bias Network Design . . . . . . . . . . . . . .
3.4 Matching Network Design . . . . . . . . . . . . .
3.5 Noise Optimization . . . . . . . . . . . . . . . . .
3.6 Low-Noise Amplifier Topologies . . . . . . . . . .
3.7 Determining ΓS and ΓL . . . . . . . . . . . . . . .
Chapter 7: Conclusion
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
C HAPTER 1
Introduction
The European Incoherent Scatter Association (EISCAT) is an international research
organization that operates four incoherent scatter radars located in northern Scandinavia.
These are used to provide ionospheric radar observations for geophysical environmental
monitoring, modelling and forecasting as well as plasma physics research.
To meet increasing demands and maintain world leadership in this field a four year
design study, EISCAT 3D [1], is underway since May 2005. This next-generation incoherent scatter radar system is based on large phased array VHF antennas. The potential
of the system will exceed all other similar facilities both existing and under construction.
Among the involved parties is Luleå University of Technology (LTU) whose main responsibility is the phased array receivers, including a low-noise amplifier (LNA). Because
of the extreme performance requisites, no commercially available pre-built product exhibit specifications near those required. Particular emphasis has therefore been put on
design and optimization of these critical components.
The work presented in this master’s thesis includes a description of conventional design
and optimization techniques for an LNA. In addition, a MATLAB particle swarm optimization implementation, a tool developed within the EISCAT 3D framework, has been
used to evaluate variations of an LNA design and optimize its associated performance
parameters. A significant portion of the work was founded in firstly the recognition of
underlying principles of LNA design and secondly understanding of the optimizer.
1
C HAPTER 2
Radio Frequency Concepts
For a fundamental understanding of the Low-Noise Amplifier design procedure, it is necessary to introduce a series of underlying concepts. Covered topics include reflection,
scattering parameters, the Smith Chart, the quality factor, and impedance transformation. Further information on this topic can be found in [2] and [3] on which this and the
next chapter are based.
2.1
Reflection
When a power wave travels through an impedance discontinuity, at that junction (Figure 2.1), a fraction of the wave will be reflected. As a consequence, the counterpart (the
incident wave) will lose some of its magnitude. Naturally, this is an undesirable phenomenon in any application where power conservation is critical. The extent of incident
power loss is related to the similarity of the impedances as seen in both directions from
the junction. So the objective, in order to maximize the power transfer, is to optimize
the impedance match. Further information on that subject follows in Chapter 3.
There are a number of performance parameters that show to what extent the impedances
are matched. Firstly, the Reflection Coefficient which by definition is the ratio of the
reflected wave to the incident wave (Equation 2.1), but can also be expressed in terms of
impedances. It is a complex entity that describes not only the magnitude of the reflection,
but also the phase shift.
ZL − ZS
Ref lected wave
=
(2.1)
Incident wave
ZL + ZS
Note that this is the load reflection coefficient with respect to the source impedance. It
is also commonly expressed with respect to the characteristic impedance (Z0 ). When the
load is short-circuited, maximum negative reflection occurs and the reflection coefficient
assumes minus unity. In contrast, when the load is open-circuited, maximum positive
ΓL =
3
4
RF Concepts
ZS
ΓL
ZL
Figure 2.1: Simple circuit showing the impedance discontinuity junction and measurement location of ΓL .
Figure 2.2: Incident wave (solid), reflected wave (dashed) and standing wave (dotted).
reflection occurs and the reflection coefficient assumes plus unity. In the ideal case, when
ZL is perfectly matched to ZS , there is no reflection and the reflection coefficient is
consequently zero.
A closely related parameter is the Voltage Standing Wave Ratio (VSWR), which is
commonly talked about in transmission line applications. As the incident and reflected
wave travel in opposite directions the addition of the two generates a standing wave, see
Figure 2.2. The VSWR is defined as the ratio of the maximum voltage to the adjacent
minimum voltage of that standing wave (Equation 2.2). Knowing the domain of the
reflection coefficient, it follows that when there is no reflection as in a perfectly matched
system; VSWR assumes its minimum and ideal value of 1.0:1.
V SW R =
|V |max
1 + |ΓL |
=
|V |min
1 − |ΓL |
(2.2)
The Return Loss (RL) is simply the magnitude of the reflection coefficient in decibels
2.2. Scattering Parameters
a1
b1
5
2-port
a2
b2
Figure 2.3: A 2-port with incident waves a1 and a2 , and reflected waves b1 and b2 .
(Equation 2.3). At times it is specified whether the return loss is measured on the inputor output side of the Device Under Test (DUT), with corresponding IRL and ORL
naming. It should be mentioned that the return loss is occasionally expressed without
the leading minus sign ending up with a negative RL. This is incorrect however as RL
should be positive.
RL = −20log|Γ|
2.2
(2.3)
Scattering Parameters
Scattering Parameters or S-parameters are complex numbers that exhibit how voltage
waves propagate in the radio-frequency (RF) environment. In matrix form they characterize the complete RF behaviour of a network.
At this point it is necessary to introduce the concept of 2-ports. It is fundamental in RF
circuit analysis and simulation as it enables representation of networks by a single device.
As the properties of the individual components and those of the physical structure of the
circuit are effectively taken out of the equation, circuit analysis is greatly simplified. The
characteristics of the 2-port is represented by a set of four S-parameters: S11 , S12 , S21
and S22 , which correspond to input reflection coefficient, reverse gain coefficient, forward
gain coefficient and output reflection coefficient respectively. The concept of 2-ports is
further described in Chapter 4 where noise calculations of linear 2-ports are addressed.
There are alternative descriptive parameters for 2-ports, such as impedance parameters, admittance parameters, chain parameters and hybrid parameters. These are all
measured on the basis of short- and open circuit tests which are hard to carry out accurately at high frequencies. S-parameters, on the other hand, are measured under matched
and mismatched conditions. This is why S-parameters are favoured in microwave applications. S-parameters are both frequency- and system impedance dependent so although
manufacturers typically supply S-parameter data with their devices it is not always ap-
6
RF Concepts
plicable. Under such circumstances, it becomes necessary to measure the parameters.
Referring to Figure 2.3, these measurements are carried out by measuring wave ratios
while systematically altering the termination to cancel either forward gain or reverse gain
according to the following equations:
b1 S11 = a1 a2 =0
b1 S12 = a2 a1 =0
b2 S21 = a1 a2 =0
b2 .
S22 = a2 a1 =0
Conclusively, the S-parameters relate the four waves in the following fashion:
2.3
(2.4)
(2.5)
(2.6)
(2.7)
b1 = S11 a1 + S12 a2
(2.8)
b2 = S21 a1 + S22 a2 .
(2.9)
The Smith Chart
The Smith Chart is a classic tool in RF engineering that has many uses and remains
widely used although computers have become a convenient alternative. It is a fundamental aid in impedance matching network design and also serves as a standard for graphical
presentation of impedance, reflectance, stability circles, gain circles, noise circles etc.
In its most common form, the chart is made up out of two overlaid grids: the constant
resistance circles and the constant reactance circles. The Cartesian coordinate system
within the Smith Chart is used to plot the reflection coefficient. Furthermore there
are three varieties of the Smith Chart: with impedance grid (Z Smith Chart), with
admittance grid (Y Smith Chart) and the two combined (ZY Smith Chart).
As the radius of the chart is unity, it is implied that all plotted values, whether they
are impedances or admittances, must be normalized with respect to a reference (Equations 2.10 and 2.11). This reference is usually the characteristic impedance of the system
which usually is 50 Ω.
z=
Z
Z0
(2.10)
y=
Y
Y0
(2.11)
2.4. The Quality Factor
2.4
7
The Quality Factor
The Quality Factor (Q) is a descriptive parameter of the rate of energy loss in complete
RLC networks or simply in individual inductors or capacitors. For the latter, Q is a
measurement of how lossy the component is, that is how much parasitic resistance there
is. So it follows that in applications where loss is undesirable, high Q components are
advantageous. Additionally the Q factor is directly related to the bandwidth, where
higher Q corresponds to narrower bandwidth. The equations for calculating Q are:
QRLC = ω
(2.13)
XL
ωL
=
R
R
(2.14)
1
|XC |
=
.
R
ωCR
(2.15)
QL =
2.5
(2.12)
ω0
QRLC
BW =
QC =
Etot
Pavg
Impedance Transformation
As previously stated, in order to maximize power transfer from source to load, matching
impedances is required. Specifically, in a circuit as seen in Figure 2.4 where the sourceand load impedances are fixed, the objective is to design the input matching network
so that ZS matches Z1 and the output matching network so that ZL matches Z2 . In
other words Z1 and Z2 respectively, are transformed to perceptually match the input
and output impedances of the transistor. According to the Maximum Power Theorem,
the maximum power transfer will occur when the reactive components of the impedances
cancel each other, that is when they are complex conjugates. This is suitably called
conjugate matching.
To achieve the conversion with an impedance matching network of passive components,
there are primarily three options. Firstly, there is the L-match. Its advantage is the simplicity, but that is simultaneously its downside as well because it has only two degrees
of freedom. Since there are only two component values to set, the L-match is restricted
to determining only two out of the three associated parameters: impedance transformation ratio, centre frequency and Q. To acquire a third degree of freedom, it is therefore
desired to cascade another L-match stage. By doing so, another two types of impedance
transformation matches are encountered: the π-match and the T-match (Figure 2.5).
The advantages with the T- and π-match configurations do not end with an additional
degree of freedom. But because of their topology they can absorb parasitic reactance
present in source or load. Specifically the T-match will absorb parasitic inductance
8
RF Concepts
Z1
Input
matching
network
Output
matching
network
Transistor
ZS
Z2
ZL
Figure 2.4: Matching networks in a microwave amplifier.
Zπ2
Zπ1
ZT1
Zπ3
ZT3
ZT2
Figure 2.5: Cascaded π- and T-matching networks.
whereas the π-match will absorb parasitic capacitance. In addition it is also possible to
achieve significantly higher Q compared to an L-match configuration. Another noteworthy impedance transformation option is bandpass filtering where the port impedances
are unequal.
C HAPTER 3
Low-Noise Amplifier Design
Strategy
In a system with a series of cascaded devices, where each stage adds additional noise
that is potentially amplified along the way, it becomes evident that the very first stage
and its noise and gain characteristics are critical. This is particularly true if the input
signal is weak and has relatively large amounts of noise added to it. Hence, under these
conditions, a Low-Noise Amplifier is applicable. It is, as the name suggests, an amplifier
where particular emphasis has been put on its noise characteristics.
Ftot = F1 +
F2 − 1 F3 − 1
F4 − 1
+
+
+ ...
G1
G1 G2
G1 G2 G3
(3.1)
Friis’s formula (Equation 3.1), with which the total noise factor of a system with
cascaded stages is calculated, shows how F1 and G1 , the Noise Factor and gain of the
first stage, dominate the overall Noise Factor. And so, it could be explicitly specified that
the function of the Low-Noise Amplifier is to supply sufficient signal gain to overcome
the noise of the succeeding stages while at the same time producing as little noise as
possible itself.
3.1
Target Specifications
As the first order of business when designing an LNA it seems appropriate to establish what the target specifications are. This is done in terms of a number of various
parameters.
9
10
3.1.1
LNA Design Strategy
Gain
The gain of the device is its ability to amplify the amplitude or the power of the input
signal. It is defined as the ratio of the output- to the input signal and is often referred
to in terms of decibels (Equation 3.2).
V oltage Gain =
2
Vout
Rout
10log( V 2
in
Rin
) = 20log(
Vout
)
Vin
(3.2)
Power gain is generally defined as the ratio of the power actually delivered to the load
to the power actually delivered by the source. However, as simple as that may seem, this
definition is not entirely relevant and is difficult to quantify since the source impedance
in turn is difficult to specify. For that reason, a number of specific and therefore more
useful definitions have evolved. Most notable are perhaps Transducer Gain- the ratio
of average power delivered to the load to maximum available average power from the
source, Available Power Gain- the ratio of maximum available average power at the load
to maximum available average power from the source. As previously discussed, maximum
power is only obtained when an amplifier is has complex conjugate terminations.
3.1.2
Noise Performance
The fundamental noise performance parameter is the Noise Factor (F), which is defined
as the ratio of the total output noise power to the output noise due to input source.
If the Noise Factor is expressed in decibels it is called the Noise Figure (NF) (Equation 3.3). Another related and often talked about parameter in RF applications is the
Signal-to-Noise Ratio (SNR), which is the ratio of the signal power and the noise power
(Equation 3.4). The Noise Factor is equivalent to the ratio of the SNR at the input and
that at the output of the LNA (Equation 3.5). Hence, the Noise Factor is a measure of to
what extent the LNA degrades the SNR. An alternative way to express just that is the
Noise Temperature (TN ), which is particularly useful with cascaded amplifier systems or
in applications where the Noise Figure is extremely low, as it allows greater resolution.
The Noise Temperature is calculated with a reference temperature (Tref ), that is normally 290 K. By definition TN is the temperature increase that is required in the source
resistance, so that it alone produces the noise that corresponds to the output noise at
Tref . Consequently, if there is no additional noise at the output of the amplifier, then TN
is 0 K.
N F = 10log(F )
SN R =
Psignal
Pnoise
(3.3)
(3.4)
3.1. Target Specifications
11
IP3
Pout
1dB
Pin
Figure 3.1: 1st-order output (solid), 3rd-order IM product (dotted).
F =
3.1.3
SN Rin
TN
=1+
SN Rout
Tref
(3.5)
Linearity
The linearity of the LNA is another concern that must be taken into account. Linear
operation is crucial, particularly when the input signal is weak with a strong interfering
signal in close proximity. This is because in such a scenario there is a possibility for
undesired intermodulation distortion such as blocking and crossmodulation.
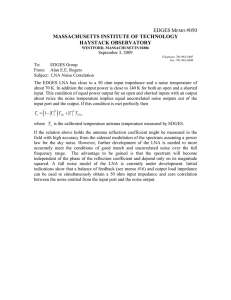
Third-order intercept (IP3) and 1-dB compression point (P1dB ) are two measures of
linearity. IP3 shows at what power level the third-order intermodulation product is
equal to the power of the first-order output. IIP3 and OIP3 are the input power and
output power respectively, that corresponds to IP3. P1dB shows at what power level
the output power drops 1 dB, as a consequence of non-linearities, relative the theoretical
linear power gain, Figure 3.1. By knowing either IP3 or P1dB the other can be estimated
with the following rule-of-thumb formula:
IP 3 = P1dB + 10dB.
(3.6)
Both measurements indicate an upper distortion limit for the tolerable input power,
whereas the noise figure sets a lower limit. The ratio of the two determines the dynamic
range of the amplifier. Another similar measurement is the Spurious-Free Dynamic Range
(SFDR), which in the LNA context usually relates to the greatest possible differential between the output signal power and the power of the third-order intermodulation product.
This occurs at the point where the latter emerges above the noise floor, Figure 3.2.
12
LNA Design Strategy
Pout
C A
B
Pin
Pnoise
Figure 3.2: 1st-order output (solid), 3rd-order IM product (dotted). P1dB (A), IIP3 (B) and
SFDR (C).
3.1.4
Stability
In a stability perspective, an LNA can be either unconditionally stable or potentially
unstable. Given the former condition, the LNA will not oscillate regardless of what
passive source- and load impedance it is connected to. In a 2-port network, as seen
in Figure 3.3, oscillation may occur when some load and source termination cause the
input- and output impedance to have a negative real part. There are three main causes
for this scenario: internal feedback, external feedback and excessive gain at out-of-band
frequencies. To prevent instability, the aim is to place ΓS and ΓL in the stable region of
the Smith Chart. In practice, this is done with filtering and resistive loading to attenuate
gain. The condition for unconditional stability, in terms of S-parameters is
K=
1 − |S11 |2 − |S22 |2 + |∆|2
> 1,
2|S12 S21 |
(3.7)
where
∆ = S11 S22 − S12 S21 .
(3.8)
It is common practice to graphically present the region for which the LNA is unconditionally stable with stability circles in the Smith Chart. That include the input stability
circle in the ΓS -plane and the output stability circle in the ΓL -plane. The circumstances
determine whether the stable region is inside or outside the stability circle according to
Figures 3.4 and 3.5
3.1. Target Specifications
ΓS
13
ΓOUT
ΓIN
ZS
ΓL
ZL
2-port
ZOUT
ZIN
Figure 3.3: Stability of 2-port networks.
rs
rs
CS
CS
Figure 3.4: Smith chart illustrating grey stable region in the ΓL plane. Left: |S11 | < 1, right:
|S11 | > 1.
CL
rL
CL
rL
Figure 3.5: Smith chart illustrating grey stable region in the ΓS plane. Left: |S22 | < 1, right:
|S22 | > 1.
14
LNA Design Strategy
-3dB
∆f
f0
Figure 3.6: Illustration of centre frequency and bandwidth.
3.1.5
Centre Frequency and Bandwidth
As the LNA will operate with input signals of a particular frequency band, it is desired
to design it with a centre frequency and bandwidth accordingly. Looking at the transfer
function of the LNA, the differential of the two points around the centre frequency f0 ,
where the power gain is halved, is the bandwidth, denoted ∆f in Figure 3.6. Although
the target bandwidth should be specified numerically, by naming convention there are
two options: narrowband and wideband.
3.1.6
Return Loss
The Return Loss is a measure of how well the input impedance is matched to the reference
impedance or how well the output impedance is matched to the load impedance in a
power transfer perspective. Strictly speaking it signifies how much power is reflected due
to impedance mismatch relative the transmitted power. Return loss is typically specified
as IRL, which corresponds to the return loss at the input port.
3.2
Active Device Selection
The properties of the active device are in many ways the final limiting factor for many
parameters of the LNA. It is therefore good practice to select an active device with
parameters (in terms of noise figure, gain and linearity) that correspond to and preferably
exceed those of the target specifications.
There are various active devices that are well suited for LNA applications including,
but not limited to, the Heterojunction Bipolar Transistor (HBT), the Metal Epitaxial
Semiconductor Field Effect Transistor (MESFET), the Modulation-Doped Field Effect
Transistor (MODFET) and the High Electron Mobility Transistor (HEMT). In addition
there are a multitude of varied semiconductor compounds that further extend the op-
3.3. DC Bias Network Design
15
Figure 3.7: A passive bias network [4].
tions. In the interest of limiting the scope of this thesis however, the device of choice
is the GaAs Enhancement Mode Pseudomorphic High Electron Mobility Transistor (EPHEMT): Avago Technologies ATF-541M4 [4].
3.3
DC Bias Network Design
The purpose of the bias network is to set the quiescent point. That is the Vgs and Ids
for a FET that causes it to operate in the preferred region. In a general perspective
there are several types of biasing networks, although in LNA applications low complexity
is desired and often sufficient. Typical passive and active bias networks can be seen in
Figures 3.7 and 3.8.
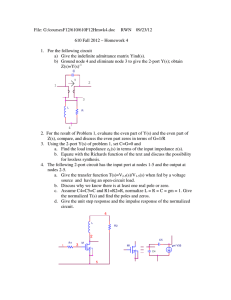
3.4
Matching Network Design
The concepts of impedance matching and impedance transformation have already been
described in Chapter 2. To display how impedance matching is carried out in practice,
it will be illustrated with an example [5] using the Smith Chart. Observe however, that
there are other means, such as with computer software. Consider the circuit in Figure 3.9.
The objective here is to maximize power gain, and therefore transform ZL into ZS∗ .
Assume that the matching network topology is yet unknown. What is known however
is that that ZL > ZS∗ , for that reason a downward impedance transformer L-match is
used. Should a single L-match not be sufficient, additional shunt and series impedances
16
LNA Design Strategy
Figure 3.8: An active bias network [4].
L
ZS
ZS*
C
ZL
Figure 3.9: Matching network design example circuit. ZS =25-j15 Ω and ZL =100-j15 Ω.
can be added incrementally until the target impedance is reached. Graphically, as it is
be shown in the Smith Chart in Figure 3.10, the objective is to find a route to link the
points corresponding to the normalized ZL and ZS∗ .
First normalize ZL and ZS∗ with the system impedance. If it is unknown, use an
arbitrary value in the same range as those of the load and source. In this example
Z0 = 50 Ω is appropriate.
zS∗
ZS∗
= 0.5 + j0.3
=
Z0
(3.9)
3.5. Noise Optimization
17
ZL
= 2 + j0.5
(3.10)
Z0
Next, mark zS∗ and zL in the Smith Chart, then consider the first component, the shunt
capacitor. Because it is a shunt component it is preferable to convert to admittance.
Hence, find the point denoted A by rotating 180 degrees from zL . Next, go clockwise
along the constant conductance circle to find point B. Because the value of the shunt
capacitor is unknown, the length of the arc from A to B is also unknown. In this example
however, as the arc for the series inductor has to be on the same constant resistance circle
as zS∗ it is possible to geometrically find B. Finally, since the next component is in series,
convert back to impedance to point D and from there go clockwise to zS∗ .
The length of the arc A through B (b=0.78) is the normalized susceptance of C, whereas
the length of the arc D through zS∗ (x=1.2) is the normalized reactance of L. To finalize,
their respective values are calculated for a specified operating frequency of 60 MHz:
zL =
B
= 41.4pF
2πf
(3.11)
X
= 159.9nH.
2πf
(3.12)
B = bY0 = ωC ⇒ C =
X = xZ0 = ωL ⇒ L =
3.5
Noise Optimization
Since the match for optimum noise normally does not coincide with the optimum gain, linearity- or input match the objective is usually to find a satisfactory compromise.
However, firstly to optimize the LNA exclusively for low noise, consider the general
expression for noise in an LNA 2-port:
Rn
[(Gs − Gopt )2 − (Bs − Bopt )2 ].
(3.13)
Gs
Where Fmin is the minimum noise factor, Rn is the noise resistance, Gs is the source
conductance, Bs is the source susceptance, Gopt is the optimum conductance and Bopt
is the optimum susceptance. It becomes evident that for minimum noise the source
admittance or impedance equivalent must appear to the LNA as Gopt + jBopt .
To obtain a simultaneous noise and input match, Γ∗IN (that yields best gain and input
match) has to be shifted graphically in the Smith Chart in closer proximity to Γopt (that
yields minimum noise). In practice this is done with inductive source degeneration or
series feedback.
F = Fmin +
3.6
Low-Noise Amplifier Topologies
The properties of an LNA are not only determined by the active device and the matching
networks around it, but also its topology. A couple of commonplace examples are seen
18
LNA Design Strategy
B
zS*
A
zL
D
Figure 3.10: Smith Chart for matching network design example circuit.
3.7. Determining ΓS and ΓL
19
Figure 3.11: Left: narrowband LNA with inductive source degeneration, right: common source
LNA with parallel feedback.
in Figure 3.11. Firstly a narrowband LNA with inductive source degeneration and gate
inductance for an additional degree of freedom. Secondly a common source LNA with
parallel RC feedback for stability purposes. One might also consider a cascade topology
with a common base to common source configuration, this improves input-output isolation which simplifies matching. It also improves gain, however the downside with this
topology is reduced noise performance.
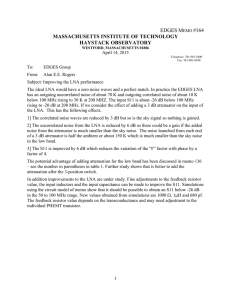
3.7
Determining ΓS and ΓL
When the target specifications are determined, an active device and its working point
have been selected, the LNA design [3] then begins with a plot of source stability-,
constant noise- and constant gain circles as depicted in Figure 3.12. The required circle
equations derivations follow.
With the equation for noise in a 2-port amplifier slightly altered with normalized noise
resistance and source admittance, it becomes:
F = Fmin +
rn
|ys − yopt |2 .
gs
(3.14)
Expressing ys and yopt in terms of reflection coefficients, with these relations
ys =
yopt =
yields the following expression:
1 − Γs
1 + Γs
(3.15)
1 − Γopt
1 + Γopt
(3.16)
20
LNA Design Strategy
F = Fmin +
4rn |Γs − Γopt |2
.
(1 − |Γs |2 )|1 + Γopt |2
(3.17)
From this equation it can be seen that the noise figure depends on the variable Γs and
three quantities known as the noise parameters: Fmin , rn and Γopt . These quantities are
given by the transistor manufacturer but can also be determined experimentally.
For a specified noise figure Fi the equation becomes:
2
2
2
Γs − Γopt = Ni + Ni (1 − |Γopt | )
1 + Ni (1 + Ni )2
(3.18)
The centre of the circle is at
CF i =
Γopt
1 + Ni
(3.19)
and its radius is
rF i =
1
1 + Ni
q
Ni2 + Ni (1 − |Γopt |2 ).
(3.20)
The derivations for the constant available gain circles are
GA = |S21 |2 1 − |Γs |2
= |S21 |2 ga .
S22 −∆Γs 2
1 − | 1−S11 Γs | |1 − S11 Γs |2
(3.21)
The centre of the circle is at
Ca =
ga C1∗
,
1 + ga (|S11 |2 − |∆|2 )
(3.22)
where
∗
C1 = S11 − ∆S22
.
(3.23)
p
1 − 2K|S12 S21 |ga + |S12 S21 |2 ga2
.
ra =
|1 + ga (|S11 |2 − |∆|2 )|
(3.24)
The radius of the circle is
Conclusively, the output- and input stability circles are plotted with the following
equations
∗ ∗
(S22 − ∆S11
)
S12 S21
|=|
|, |ΓIN | = 1
2
2
|S22 | − |∆|
|S22 |2 − |∆|2
(3.25)
∗ ∗
(S11 − ∆S22
)
S12 S21
|=|
|, |ΓOU T | = 1.
2
2
|S11 | − |∆|
|S11 |2 − |∆|2
(3.26)
|ΓL −
|ΓL −
3.7. Determining ΓS and ΓL
21
The centres and radii respectively are
CL =
∗ ∗
)
(S22 − ∆S11
|S22 |2 − |∆|2
∗ ∗
)
(S11 − ∆S22
2
|S11 | − |∆|2
S12 S21 rL = |S22 |2 − |∆|2 S12 S21 .
rS = |S11 |2 − |∆|2 CS =
(3.27)
(3.28)
(3.29)
(3.30)
In the example plot of Figure 3.12 it can be seen that the centre of the constant noiseand constant available gain circles that represent optimum Γs for minimum noise and
available gain respectively, do not coincide. It is therefore not possible to achieve a simultaneous optimum match. However, it is possible to shift Γs for available gain by means
of inductive source degeneration - without degrading the noise performance significantly.
This popular narrowband LNA technique effectively reduces the compromising between
noise and available gain when selecting and designing Γs presented to the LNA input.
Naturally, if input unconditional stability is desired, Γs has to be situated in the stable
region of the Smith Chart.
When Γs is selected, the proceedings continue by determining the output reflection
coefficient (Γout ) of the LNA and then plot load stability circles. If then Γ∗out is in the
stable region, ΓL is set to Γ∗out for a complex conjugate matched output. Should that not
be the case, transducer gain circles are drawn to find a ΓL in the stable region that leads
to reasonably high transducer gain.
22
LNA Design Strategy
Figure 3.12: Smith Chart with constant noise circles (solid) constant available gain circles
(dashed) and input stability circle (dotted).
C HAPTER 4
2-ports and Noise
In [6] a method for computer aided linear 2-port noise analysis is presented. Following
traditional 2-port noise analysis, the 2-port is equivalently interpreted as a noiseless 2port coupled with two external noise sources. Depending on the orientation and type
of the noise sources, there are six representations of equivalent circuits. However, three
representations are sufficient for general applications. These representations are admittance, impedance and chain/cascade as shown in Table 4. The method in [6] introduces
that the noise in linear circuits be characterized by correlation matrices as opposed to
voltages and currents. Specifically, the correlation matrix of a 2-port consists of four
elements that are the power spectrum densities of the cross- and auto-correlations of the
noise sources. The noise sources no longer need to be fully correlated or uncorrelated but
can also be partially correlated as would be the case with transistor 2-ports. Another
advantage is that the analysis explicitly provides data of the noise parameters N Fmin ,
Rn and Yopt .
4.1
4.1.1
Method of Linear 2-port Noise Analysis
Decomposition
If the noise analysis is applied to a complete circuit, the initial step is to disassemble
it into single component 2-ports. This process is performed in a manner so that one
component at a time is isolated from the rest of the circuit, while identifying its relative
connection. The disassembly procedure is shown in Figure 4.1. It can be seen that in
stage A, the rightmost resistor is isolated and is cascade connected to the remaining
circuit. In stage B, the bottommost resistor is isolated and is series connected. Lastly, in
stage C, the feedback resistor is isolated from the transistor and is connected in parallel.
23
24
2-ports and Noise
Noiseless
2-port
i1
u1
i2
Admittance
Ci1 i∗1 Ci1 i∗2
CY =
∗
∗
Ci2 i1 Ci2i2
y
y
Y = 11 12
y21 y22
Noiseless
2-port
u2
Impedance
Cu1 u∗1 Cu1 u∗2
CZ =
Cu2 u∗1 Cu2 u∗2
z
z
Z = 11 12
z21 z22
u
i
Noiseless
2-port
Cascade
Cu1 u∗1 Cu1 i∗2
CA =
∗
∗
C
i2 u1 Ci2 i2
a
a
A = 11 12
a21 a22
Table 1: Correlation matrices and electrical matrices of Y, Z and A representations.
4.1.2
Determination of Correlation Matrix
Essential to the noise analysis is that the correlation matrix of each basic 2-port is known.
That can be determined either theoretically or by noise measurements. Examples of 2ports for which the correlation matrix can be determined theoretically are those that
only consist of passive elements. The correlation matrices in impedance and admittance
representation are
CZ = 2kT <{Z}
(4.1)
CY = 2kT <{Y }
(4.2)
where k is the Boltzmann constant, T is the absolute temperature, Z and Y are the
electrical matrices in impedance and admittance representation respectively. For active device 2-ports it may be necessary to measure the noise parameters and thereafter
calculate the correlation matrix in cascade representation:
N Fmin −1
∗
Rn
− Rn Yopt
2
(4.3)
CA = 2kT N Fmin −1
− Rn Yopt
Rn |Yopt |2
2
4.1.3
Interconnection
Once the correlation matrix of each basic 2-port is known, they can be successively
interconnected. With each interconnection the resulting correlation matrix is calculated
with respect to the representation according to the following:
CZ = CZ 1 + CZ 2
(4.4)
CY = CY 1 + CY 2
(4.5)
4.1. Method of Linear 2-port Noise Analysis
25
A
B
C
Figure 4.1: 2-port amplifier disassembly illustration.
CA = A1 CA2 A∗1 + CA1
(4.6)
In the event that the 2-ports are in unmatched representations, e.g. when a series
2-port is connected with one that is in parallel, one has to be converted into the other.
Naturally and if applicable, it is preferred to convert to that representation of the next
2-port to avoid redundant calculations. Table 4.1.3 shows a the different transformation
matrices.
26
2-ports and Noise
Y
To
Z
A
From
Y Z A 1 0
y11 y12
−y11 1
y21 y22
0 1 −y21 0
z11 z12
1 0
1 −z11
0 −z21
z21 z22 0 1 0 a12
1 −a11
1 0
1 a22
0 −a21
0 1
Table 2: Y, Z and A transformation matrices.
4.1.4
Noise Parameter Calculation
In conclusion, when the entire original 2-port is rebuilt its noise parameters can be
extracted from the equity
N Fmin −1
∗
Rn
−
R
Y
n
opt
2
CA = 2kT N Fmin −1
.
−
R
Y
Rn |Yopt |∗
n
opt
2
C HAPTER 5
The Optimizer
A classic approach to LNA design using the Smith Chart has been shown. However, as
performance requirements get higher it becomes increasingly difficult to carry out this
task manually. Computer aided optimization provides higher efficiency under such circumstances. For that reason a MATLAB implementation of the method described in
[6] has been developed at LTU by Johan Borg. It uses stochastical particle swarm optimization (PSO) and has features that enhance the transition to real world applications,
including non ideal inductors and real component values. This optimizer has been used
to design the EISCAT 3D LNA.
5.1
Description
The optimizer takes a user definable LNA topology along with matching networks, where
each component is a 2-port with defined properties. Then a corresponding s-parameter
and correlation matrix for the entire circuit is computed and passed on to the PSO
implementation.
Initially in the PSO process, the dimensions of the search space and the solution criteria
are defined. Thereafter the population is initialized, that is particle starting positions are
either randomized or set by user. Then the swarm is launched to search for an optimum.
The velocity and position of the individual particles are updated based on discrete time,
current position and velocity, and the particle’s personal best position as well as that of
the entire swarm, the global best. The efficiency of PSO is founded in this inter-particle
collaboration. This iterative process proceeds until a position has been found that to the
greatest possible extent qualify with the predetermined solution criteria. The criteria
of this application requires input stability and that noise figure, return loss and gain
match or exceed the defined target specifications seen in Table 1. In addition, a list of
values is set that specify the desired transfer function. This sets the centre frequency
27
28
The Optimizer
Gain
NF
IRL
Centre
BW
18.0 dB
0.55 dB
17.0 dB
225 MHz
30 MHz
Table 1: Target requirements.
and bandwidth of the LNA. As the optimization halts, the applied component values are
given.
5.2
Notable functions
The optimizer features a set of functions for inter-representation transformation based
on on the transormation matrices in Table 2 in Chapter 4. These are used when two
representations of different representations are connected.
A_to_s A_to_Y A_to_Z
s_to_A
s_to_Y s_to_Z
Y_to_A
Y_to_Z
Z_to_A
Z_to_Y
The A-, Z- and Y-representations include electrical- and correlation matrices whereas
the s-representation has s-parameters and noise parameters. To attain compliance, the
noise parameters are therefore converted (Equation 4.3) into correlation matrix form
when the s to A function is used. As for the functions s to Y and s to Z, a passive 2port is implied and the correlation matrices are computed solely based on temperature
according to Equations 4.1 and 4.2.
In addition there are three functions to connect 2-ports, based on Equations 4.4 - 4.6:
A_connect Y_connect Z_connect
To initialize an A-representation matrix of individual components while differentiating
between parallel and series orientation, the following functions are used:
A_s_capacitor A_s_inductor A_s_resistor
A_p_capacitor A_p_inductor A_p_resistor
5.3
Usage
As previously stated, the optimizer is based on the noise analysis method of [6]. Usage
is therefore similar to that described in Chapter 4, except labour intensive tasks are
5.3. Usage
29
conveniently carried out by machine. The one critical step the optimizer will not do
however, is to find an appropriate matching network- and amplifier topology. This subject
will be addressed in the next chapter. After the LNA circuit to be optimized is known,
it has to be loaded into the target function that is subsesequently passed on to PSO.
A general case with the inductive source degeneration LNA, displayed in Figure 3.12,
would be loaded in the following manner;
A_tran=s_to_A(s); % define transistor
A_Rs=A_s_resistor(Rs,w); % define series resistor Rs
A_Lg=A_s_inductor(Lg,w,IM1); % define series inductor
A_Ls=A_p_inductor(Ls,w,IM1); % define parallel inductor
A=A_connect(A_Rs,A_Lg); % connect Rs and Lg
A=A_connect(A,A_tran); % connect transistor
Y=Y_connect(A_to_Y(A),A_to_Y(A_Ls)); % connect Ls
A=Y_to_A(Y); % convert to A representation
where s is a merged matrix of s- and noise parameters derived from measured data and
manufacturer data, w contains frequency domain data and IM 1 is one of four inductor
component libraries available.
C HAPTER 6
LNA Topology Evaluation
Given the complexity of LNA design, it is often times challenging to find a satisfying
design topology. It may also have to comply with strict requirements which further
increase the difficulty level of this task. In this chapter the single transistor LNA seen in
Figure 6.2, that was built for the EISCAT 3D project, is evaluated using the optimizer
described in Chapter 5. Then, a simplified version, seen in Figure 6.3 is optimized. After
that a version without feedback is evaluated, seen in Figure 6.4. Finally a version with
inductive source degeneration, Figure 6.5, is optimized. All variations of the final design
have been optimized using the same solution criteria. Furthermore, all circuits have a
bandpass filter, Figure 6.1, connected to the output to achieve the required narrowband
operation.
Lf1
Lf3
Cf1
Cf3
Lf2
Lf4
Cf2
Cf4
Figure 6.1: Bandpass filter.
31
32
LNA Topology Evaluation
Cc
Cplr Cs4 Cs2
Cl5
Lp1
Ls3
Rd1
Cs1
Rc
Cl3
Cl4
Rd2
Ls2
Ls1
Figure 6.2: Circuit 1: Original.
Rc
Ls2
Cf 2
Rd2
87.97
330.0
22.40
469.5
Cc
Lf 1
Cf 3
Lp1
0.1410
68.00
25.19
150.0
Cl4
Lf 2
Cf 4
Cs4
14.06
1.000
373.6
22.00
Cs1
Lf 3
Ls3
Ls
246.1 Cs2
33.00 Lf 4
33.00 Cl3
-
144.0 Ls1
10.00 Cf 1
1.773 Rd1
55.03
15.48
37.13
Table 1: Component values for circuit 1. Capacitances in pF, inductances in nH and resistances
in Ω.
6.1
Circuit 1: Original
The original EISCAT 3D design, includes the following components: a protective shunt
inductor: Lp1 , a directional coupler: Cplr, a protective diode modelled as a capacitor:
Cl5 , signal coupling capacitors: Cs1 , Cs4 and Cs2 , bias network decoupling inductors: Ls1
and Ls2 , an input matching network: Ls3 and Cl3 , parallel negative feedback: Rc and Cc ,
a stabilizing shunt capacitor: Cl4 , series and shunt stabilizing resistors: Rd1 and Rd2 .
This circuit performed as expected and the performance parameters are within specifications. Figures 6.6 and 6.7 illustrate the frequency domain behaviour and the optimized
component values are shown in Table 1.
6.2
Circuit 2: Simplified
In the simplified circuit, a significant number of components are removed from the original
circuit. With the exception of those with protective purposes, three signal coupling
capacitors and the bias network decoupling inductors. In Figures 6.6 and 6.7, it can be
seen that this circuit is unstable for some frequencies. Furthermore, as it can be seen in
Table 5, neither NF nor IRL is satisfactory.
6.3. Circuit 3: Without Feedback
33
Figure 6.3: Circuit 2: Simplified.
Rc
Ls2
Cf 2
Rd2
470.0
33.08
-
Cc
Lf 1
Cf 3
Lp1
33.00
20.45
68.00
Cl4
Lf 2
Cf 4
Cs4
33.00
952.3
22.00
Cs1
Lf 3
Ls3
Ls
283.4 Cs2
12.00 Lf 4
Cl3
-
353.5 Ls1
12.00 Cf 1
Rd1
339.4
5.243
-
Table 2: Component values for circuit 2. Capacitances in pF, inductances in nH and resistances
in Ω.
6.3
Circuit 3: Without Feedback
Circuit 3 is a copy of the original circuit, short of the parallel feedback. The circuit shows
similar in-band characteristics, see Figures 6.6 and 6.7, as that of the original circuit, has
equivalent noise- and return loss figures according to Table 5, and roughly 1 dB higher
gain.
Rc
Ls2
Cf 2
Rd2
220.0
15.21
693.5
Cc
Lf 1
Cf 3
Lp1
68.00
42.87
150.0
Cl4
Lf 2
Cf 4
Cs4
10.82
2.200
254.7
22.00
Cs1
Lf 3
Ls3
Ls
260.2 Cs2
33.00 Lf 4
33.00 Cl3
-
41.39 Ls1
10.00 Cf 1
1.836 Rd1
43.89
41.93
45.06
Table 3: Component values for circuit 3. Capacitances in pF, inductances in nH and resistances
in Ω.
34
LNA Topology Evaluation
Figure 6.4: Circuit 3: Without feedback.
Figure 6.5: Circuit 4: Inductive source degeneration.
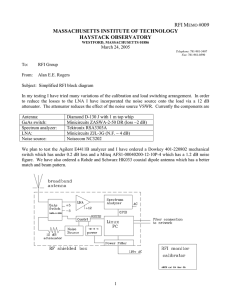
6.4
Circuit 4: Inductive Source Degeneration
This circuit employs inductive source degeneration that should shift Γ∗IN closer to Γ∗OP T
and thereby render a better noise-gain match possible. According to [2], this method
creates a resistive input impedance without the noise of a real resistor. The resistance
is controlled by choice of inductance. Since the impedance is only purely resistive at
resonance, this method offers a narrowband impedance match. As it can be seen in
Figure 6.5, there is no parallel feedback in this circuit. Figures 6.6 and 6.7 indicate that
the circuit is unconditionally stable and has a flat in-band gain, much like circuits 1 and
3. In addition, in comparison with the original circuit, this circuit has a notably higher
gain and lower noise figure.
6.4. Circuit 4: Inductive Source Degeneration
(dB)
Circuit 1: Original
(dB)
20
0
10
-50
0
-100
-10
a
10GHz
-150
35
a
10GHz
a
10GHz
a
10GHz
Circuit 2: Simplified
(dB)
(dB)
20
0
10
-50
0
-100
-10
a
10GHz
-150
Circuit 3: Without feedback
(dB)
(dB)
20
0
10
-50
0
-100
-10
a
10GHz
-150
Circuit 4: Inductive source degeneration
(dB)
(dB)
20
0
10
-50
0
-100
-10
a
10GHz
-150
a
10GHz
Figure 6.6: Input return loss (left) and gain (right) of all circuits. A denotes the centre frequency
of 225 MHz.
36
LNA Topology Evaluation
Circuit 1: Original
(dB)
(dB)
20
0
10
-50
0
-10
bc
1GHz
-100
bc
1GHz
bc
1GHz
bc
1GHz
Circuit 2: Simplified
(dB)
(dB)
20
0
10
-50
0
-10
bc
1GHz
-100
Circuit 3: Without feedback
(dB)
(dB)
20
0
10
-50
0
-10
bc
1GHz
-100
Circuit 4: Inductive source degeneration
(dB)
(dB)
20
0
10
-50
0
-10
bc
1GHz
-100
bc
1GHz
Figure 6.7: Input return loss (left) and gain (right) of all circuits. B and C denote the passband
210-240 MHz.
6.4. Circuit 4: Inductive Source Degeneration
Rc
Ls2
Cf 2
Rd2
220.0
19.33
517.8
Cc
Lf 1
Cf 3
Lp1
68.00
38.79
220.0
Cl4
Lf 2
Cf 4
Cs4
12.75
2.200
280.6
22.00
Cs1
Lf 3
Ls3
Ls
160.0 Cs2
22.00 Lf 4
22.00 Cl3
1.646
37
18.70 Ls1
12.00 Cf 1
0.1002 Rd1
68.00
30.94
22.53
Table 4: Component values for circuit 4. Capacitances in pF, inductances in nH and resistances
in Ω.
Gain
NF
IRL
Target
1
18.0
18.16
0.55
0.5480
17.0
16.95
2
18.47
0.6436
4.796
3
19.33
0.5411
16.96
4
20.07
0.4609
17.04
Table 5: Gain, Noise Figure and IRL of all circuits.
C HAPTER 7
Conclusion
To design a low-noise amplifier using traditional methods is an involved process that
requires a solid understanding of underlying principles. As one performance parameter
is affected negatively by the optimization of another it is clear that some degree of
compromising is necessary. With high overall performance requirements, little freedom
for compromising is allowed and the design process becomes increasingly complex.
The computer aid given by the particle swarm MATLAB optimizer has therefore been
an invaluable asset. Given an LNA topology and a fitness function to evaluate possible
solutions, it outputs component values and performance parameters in terms of return
loss, gain and noise figure. The frequency dependance of the former two are also given
in graphical format.
Since the objective was to find an LNA topology with performance which exceeded
that of the EISCAT 3D design, it was natural to use that as a starting point and with
the use of the optimizer see how slight changes to it affected performance. An initial
run on the basis of the the original circuit showed that it had adequate performace with
respect to the predetermined specifications. A simplified and over-constrained toplogy
then showed insufficient performance in terms of noise figure and stability although gain
was reasonable. In a third run, the effect of the stabilizing feedback stage was examined by
removing it from the circuit. As expected this circuit showed higher gain, but could also
meet the stability requirements. The conclusion must be that with the existing criteria,
feedback is redundant. The final circuit employed inductive source degeneration, where
an inductor is connected to the source terminal. The desired effect of this is to decrease
the performance loss associated with gain-noise figure compromising. This led to an
approximate 2 dB gain increase and 0.1 dB noise figure reduction. The computed value
of the source inductor (Ls ) was 1.6 nH, which is low enough to be practically realizable
with a micro strip solution.
39
Bibliography
[1] EISCAT, “EISCAT 3D the Next Generation European Incoherent Scatter Radar System.” https://e7.eiscat.se/groups/EISCAT_3D\_info/Introduction%20and%
20Brief%20Background.pdf, Nov 2008.
[2] T. H. Lee, The Design of CMOS Radio-Frequency Integrated Circuits. Cambridge:
Cambridge University Press, 2nd ed., 2004.
[3] G. Gonzalez, Microwave Transistor Amplifiers: Analysis and Design. New Jersey:
Prentice Hall, 2nd ed., 1996.
[4] Avago, “ATF-541M4 Low Noise Enhancement Mode Pseudomorphic HEMT in
a Miniature Leadless Package: Data Sheet.” http://www.avagotech.com/docs/
AV02-0924EN, Nov 2008.
[5] Maxim, “Impedance Matching and the Smith Chart: The Fundamentals.” http:
//www.maxim-ic.com/appnotes.cfm/an_pk/742, Nov 2008.
[6] H. Hillbrand and P. H. Russer, “An efficient method for computer aided noise analysis
of linear amplifier networks,” IEEE Transactions on Circuits and Systems, vol. CAS23, no. 4, pp. 235–238, 1976.
41