Making the Right Oscilloscope Choice: Equivalent time or
advertisement

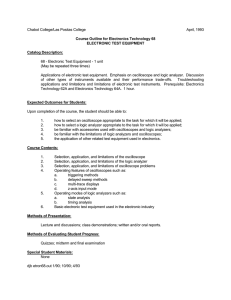
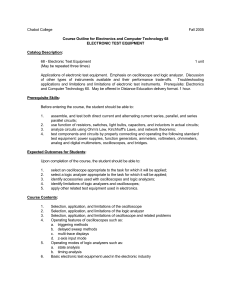
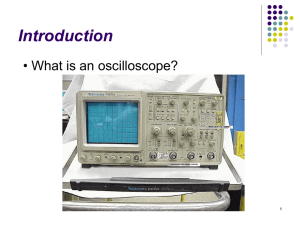
Making the Right Oscilloscope Choice: Equivalent time or realtime? By Dean Miles, Tektronix Oscilloscope acquisition methods are broadly divided into real time and equivalent time. While the difference in utility between the two is obvious for some measurements – say, power-up sequence – the comparison becomes more complex for serial data applications. While the latest generation of real-time oscilloscopes offer significantly more bandwidth than in the past, serial data rates, especially on the optical side, have continued to climb as well with little end in sight. This means there will continue to be a strong need for higher bandwidth and greater precision offered by equivalent sampling oscilloscopes for the foreseeable future. In order to make the right choice in instrument selection for a particular application, it’s important to have a clear understanding of the strength and weaknesses of each instrument. We then take a look at applications for equivalent time oscilloscopes in serial and optical test. Sampling technology basics Although there are a number of different implementations of sampling technology, today’s digital oscilloscopes utilize two basic sampling methods: real-time sampling and equivalent-time sampling. Equivalent-time sampling can be divided further, into two subcategories: random and sequential. Each method has distinct advantages, depending on the kind of measurements being made. For more details, please check out: www.tektronix.com/oscilloscopes Real-time sampling is ideal for signals whose frequency range is less than half the oscilloscope’s maximum sample rate. Here, the oscilloscope can acquire more than enough points in one “sweep” of the waveform to construct an accurate picture, as shown in Figure 1 below. Real-time sampling is an ideal way to capture fast, single-shot, transient signals with a digital oscilloscope. The “real-time” bandwidth is typically related to the sample rate with the following formula: e.g.. BW = Sample Rate / 2.5. Figure 1: Real-time sampling mode acquires all points in a record from a single trigger event When measuring high-frequency signals, the oscilloscope may not be able to collect enough samples in one sweep. Equivalent-time sampling can be used to accurately acquire signals whose frequency greatly exceeds the ratio of available Sample Rate/2.5 . Equivalent time sampling constructs a picture of a repetitive signal by capturing a specific bit of information from each repetition, as shown in Figure 2 below. The waveform builds up, one-by-one. This allows the oscilloscope to precisely capture signals whose frequency components are much higher than the oscilloscope’s sample rate Figure 2: Equavalent-time sampling mode acquires the waveform points after multiple triggers. This example shows random For more details, please check out: www.tektronix.com/oscilloscopes Signal acquisition modes In comparing acquisition modes, real-time oscilloscopes are straightforward enough: they acquire samples fast enough to reconstruct the signal within their bandwidth and dynamic range. This means that they have to sample beyond the Nyquist, that is, their sample rate is more than 2x of their bandwidth – e.g. 50 GS/s is sufficient for a 20 GHz oscilloscope. Normally they digitize with a clock that is asynchronous to the device under test (DUT). In the case of acquiring a serial data stream, every acquisition will be captured with a random phase between the serial data clock or data stream and the digitizer. As we discuss later, the trigger is often not essential. Besides operating with the real time acquisition mode, many real-time oscilloscopes also support an equivalent time mode. In this mode of a real-time oscilloscope, the digitizer is still running asynchronously of the DUT, and as many repetitive acquisitions of the signal are made phase between the oscilloscope’s digitizer and the DUT’s clock randomly varies. What’s different is that this time the trigger timing information is essential, and is used to place the acquired points into the record, relative to the same trigger point which, in the case of a serial data acquisition, would be in a fixed relationship to the DUT’s clock. Since many acquisitions are made, sample-to-sample spacing will be smaller than the spacing the digitizer exhibits, and the resulting apparent sample sate can easily reach TS/s. And since the phase of acquisitions is random, the mode is called random equivalent time sampling. This mean that the sampleto- sample spacing randomly decreases as the number of acquisitions grow, but strictly speaking is not guaranteed – it remains random. Now for the equivalent time of a “sampling” oscilloscope, the acquisition system is time-locked to the trigger. For serial data, the trigger is fired on the DUT signal or clock, and the acquisition samples are taken synchronously to the trigger. For serial data acquisition this means that there is a controlled phase relationship to the DUT. In other words, samples are taken in a sequence from left to right, in increasing time or phase from the trigger, in a method that properly know as “sequential equivalent time” sampling. It’s worth mentioning that the name “sampling” oscilloscope was sufficient long ago (when other oscilloscopes were analog in both time and vertical sense), but is hopelessly overloaded today when all oscilloscopes take samples in time, and so the name “sampling” oscilloscope is an anachronism. Other terms like signal or communication analyzer are a bit more up-to-date but not very specific, and thus there continues to be a certain amount of name-confusion. For more details, please check out: www.tektronix.com/oscilloscopes Random vs. Sequential Equivalent Time Sampling As noted, most high-performance real-time scopes offer equivalent-time acquisition but there is a big difference compared to traditional "sampling" scopes. Real-time oscilloscopes use random equivalent time acquisition while dedicated “sampling” oscilloscopes use sequential equivalent time sampling. The random approach to equivalent time captures samples with an asynchronous (to the trigger) clock and there is a block capable of positioning the samples. The advantage is that this makes it possible to capture samples before the trigger as typically expected from a real-time scope. However, the accuracy of the positioning of the samples does not approach what it is possible using the sequential equivalent time approach. The result can be a degraded eye with higher jitter. While the sequential equivalent time oscilloscope can only acquire samples after the trigger (unless a delay line is used), this is typically not an issue in most tests involving high-speed serial data. Serial data and oscilloscope acquisition method The key point for a serial data receiver is that everything depends on the relationship between the receiver clock and data. For example, the data stream into the receiver can be jittered, but if the clock recovery tracks jitter, and the relationship between data and clock is fixed or within a small fraction of the UI, then data can be recovered. The measurement tool should follow this logic, and so the serial data stream is typically shown plotted in with phase relative to the serial data clock. In a real-time oscilloscope the recovered clock can be generated by software that processes the captured data stream. In the case of an equivalent time oscilloscope, a real-time captured data stream doesn’t exist, so the recovered clock has to be non-virtual – a true hardware clock recovery similar to the one in a real receiver is needed. Equivalent time sampling for serial data Very high bit rates used in serial data communication often stress the acquisition system of a real-time oscilloscope in terms of available sample rate. If the oscilloscope acquires only a few data samples per UI of data the acquisition might still be within the Nyquist of the signal spectrum, but a low amount of over-sampling stresses the oscilloscope’s ability to correctly interpolate the samples for a clear, fully sampled eye. A small amount of noise will exist beyond the Nyquist, disturbing the accuracy of the interpolation even if a perfect algorithm is used. Equivalent time sampling can limit or avoid any interpolation since the equivalent (virtual) acquisition rate is not limited by the digitizer sample rate and can be huge. This advantage has its price – as mentioned above it requires a hardware clock recovery. In addition, the jitter of the captured data is burdened with the jitter floor of the clock recovery and the trigger path of the oscilloscope. This means that the jitter floor of a measurement will be worse than with the real-time acquisition. On a real-time For more details, please check out: www.tektronix.com/oscilloscopes oscilloscope it is worth experimenting with both methods – the real-time capture and the equivalent time capture to compare the trade-off of the methods. A sequential equivalent time oscilloscope presents a slightly different trade-off: the trigger jitter has been minimized by continuous efforts of oscilloscope designers, so the jitter floor issue is not a large concern. Additionally since the available bandwidth is typically much larger than the spectrum of the DUT’s signal, the bandwidth roll off of the oscilloscope is not in visible in the captured response of the device. With the vertical interpolation issues removed and the jitter floor of available oscilloscopes low enough the equivalent time oscilloscope presents the most accurate method to characterize the serial data waveform. The trade-off is another consideration, namely the limited usability of the equivalent time sequential sampling oscilloscope for less repetitive or non-repetitive measurement tasks. Trigger point, trigger counter-point Depending on the DUT setup, a clock from the DUT might also be available and then also the temptation to use such signal as the timing reference for the measurement. This is practical – saving on the need for clock recovery – but generates its own problems that should be understood before proceeding. In the case of a real-time oscilloscope the acquisition relative to the hardware clock signal provided by the DUT or the DUT test setup can lead to an overly positive view of the signal. This is because the realtime oscilloscope is triggered instantaneously and unit interval (UI) errors will not accumulate, at least not right at the trigger point. In contrast the DUT’s (receiver’s) clock recovery circuit is not following the signal’s clock errors instantly so some jitter accumulation may occur. The result may be slightly off when results are displayed on the real-time oscilloscope’s screen. This consideration remains even with a realtime oscilloscope running in random equivalent time mode. In such a case, it is best to adopt a more stringent acquisition method using advanced trigger and choose clock recovery circuit or PLL with parameters similar to that of the DUT, or verify the stability of the trigger signal clock in another way in an additional step of the DUT verification. In the case of a sequential equivalent time oscilloscope, a certain amount of jitter accumulation might be provided unwittingly by the long trigger-to-sample time, and in fact this method can be partially used by the real-time oscilloscope as well. Once again, however, a complete clock recovery (this time by necessity in HW) is a reliable way to see what the receiver will see. Understanding jitter With these considerations in mind, the equivalent time sampling oscilloscope equipped with clock recovery functionality can be a useful tool for analyzing jitter behavior in serial data designs as a “golden” alternative to the real-time oscilloscope. For instance, with a properly equipped equivalenttime oscilloscope, the probability distribution function (PDF) Eye Diagram, upper left in Figure 3, shows For more details, please check out: www.tektronix.com/oscilloscopes the statistical probability of eye closure. The display is generated by a combination of the correlated and uncorrelated horizontal and vertical information. Figure 3. Jitter analysis display on an equivalent time sampling oscilloscope. Despite its similarity in appearance to conventional eye diagrams, the PDF eye is not just a plot of sample hits, and it does not close with increasing acquisition time. While the eye still is a representation of the UI of a signal digitized horizontally and vertically into a high-resolution plot, the third dimension is the calculated probability of subsequent acquisitions hitting a particular point. The PDF Eye predicts the BER outcome not by “brute force”—acquisition of vast amounts of data—but by using the sampling capabilities to characterize the underlying distribution shape. Distribution after distribution is accumulated until all of the components of jitter and noise are measured and their PDFs known to a high degree of accuracy. In this way prediction of a BER of 1 x 10-18 becomes possible across the whole eye. Equivalent time oscilloscope applications Sequential equivalent time oscilloscopes provide a versatile tool for developing and testing high-speed communications, computers, and consumer electronics that involve multi-gigabit data transmission. They are used for optical and electrical transmitter characterization as well as verification for devices, modules, and systems used in these products. For more details, please check out: www.tektronix.com/oscilloscopes Additionally, they are well-suited for electrical signal path characterization, whether for packages, PCBs, or electrical cables. With exceptional bandwidth, signal fidelity, and a modular architecture, these instruments provide high performance TDR and interconnect analysis, detailed analysis of signal impairments, and BER calculations for current and emerging serial data technology. Also, “sampling” oscilloscopes represent the gold standard for electrical and optical applications which require ultra-high bandwidths, very fine vertical resolution, low jitter, and time interval accuracy. In summary, here’s a side-by-side comparison of when to select a real-time oscilloscope or when the equivalent time model might be the better choice: Real-time oscilloscope Only requires single trigger, can capture signals in “single-shot” mode Higher voltage input range (6.25V vs. 1 V for equivalent time scopes) Great for debug (e.g. can look at transient events from contiguous data points) with long memory depth Recovers clocks on incoming serial signals for fast eye diagram and jitter analysis Equivalent time oscilloscope Real-time scopes have high bandwidth of 30+ GHz however sampling scopes have even higher bandwidth of 70+ GHz Available Optical Reference Receiver-based modules enable direct acquisition of optical (700nm – 1800nm) signaling Low noise/jitter floor <200 ps Great for characterization ,e.g. repetitive nature lends itself well to applications such as golden SerDes testing or Time Domain Reflectometry (TDR) Because of their higher bandwidth, a wide variety of measurement and analysis tools which specifically address optical testing applications are typically available for equivalent time oscilloscopes. In addition to the standard amplitude and timing parametric measurements (e.g. rise/fall times, amplitude, RMS jitter, RMS noise, frequency, period, etc.) the measurement suites includes measurements specifically tailored to measuring optical signals include average optical power, extinction ratio, eye height, eye width and optical modulation amplitude. This provides a good review of real-time and equivalent-time oscilloscope capabilities for acquisition, clock recovery and triggering,while providing insight on additional uses for equivalent-time oscilloscopes like the DSA8300 Series from Tektronix. ### For more details, please check out: www.tektronix.com/oscilloscopes About the Author Dean Miles is a Senior Technical Marketing Manager at Tektronix responsible for Tektronix High Performance Product Portfolio. Dean has held various positions with Tektronix during his more than 20 years with the company, including Global Business Development Manager for Tektronix RF Technologies and Business Development Manager for Tektronix’ Optical Business Unit. Dean has presented Tektronix’s Technologies in more than 80 Countries around the world and met with more than 10,000 Engineers. For more details, please check out: www.tektronix.com/oscilloscopes