0characterization of neuron firing pulses in electromyographic
advertisement

BIOSIGNAL 2004
CHARACTERIZATION OF NEURON FIRING PULSES IN
ELECTROMYOGRAPHIC SIGNAL
0
0
0Shahjahan Shahid, Jacqueline Walker, Gerard Lyons, and Ciaran A. Byrne
Biomedical Engineering Laboratory, Dept. of Electronic and Computer Engineering
0University of Limerick, Ireland
0shahjahan.shahid@ul.ie
Abstract - An Electromyographic (EMG) signal may be modelled as a filter representing the
motor unit action potential convolved with a train of neuron firing pulses. Recovery of the
neuron firing pulses is difficult especially when a large number of fibres are firing at the same
time. This paper presents a technique of EMG signal decomposition allowing the recovery of
neuron-firing pulses. The technique has been applied to some real EMG signals and shows that
the rate of firing pulses increases if a subject increases muscle effort.
0
1. Introduction
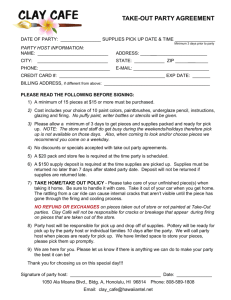
One model often used in myoelectric signal processing is the EMG signal as the output of a
LTI system that is convolved with the neuron firing pulses. This model of an EMG signal y ( n )
can be expressed as (1) [shaded part of Fig. 1] where e ( n ) is the input of a LTI system
representing the neuron firing pulses, h ( n ) = F –1 [ H ( k ) ] is a filter representing the MUAP
and w ( n ) is the system noise
y(n) = e(n) ⊗ h(n) + w(n)
(1)
[1] reported that the neuron pulses are random in nature. [2] considered the firing pulses as
non-Gaussian white noise. [3] demonstrated the non-Gaussianity of the firing pulses in
contracting muscle’s surface EMG signal. Upon considering a LTI system input signal as nonGaussian white noise (random impulse train), higher order statistics techniques [4]-[8] can be
applied to estimate the input impulse train. This paper uses the cepstrum of bispectrum [4] [5]
approach to blind deconvolution to reconstruct the system and then to recover and characterize
the neuron firing pulses from a real EMG signal.
w(n)
e(n)
h(n)
x(n)
+
y(n)
System
hi(n)
z(n)
Noise effect
cancellation
^
e(n)
Inverse
filter
Blind system and signal
Fig. 1: Block diagram of blind system’s input impulse reconstruction. Block belongs to dash
line indicates the blind signal generation concepts.
2. System’s Input Signal Estimation
Blind deconvolution techniques allow for estimation of a system and its unknown input
from a LTI system’s output signal. Generally, the problem of recovering the input signal can be
overcome by designing or estimating one or more systems that can be cascaded with the
original system [other than the shaded part of Fig. 1]. Let y ( n ) be an output signal of a LTI
system of which we want to estimate the input signal. Now, if the signal passes through a filter
h i ( n ) [ = F –1 [ H i ( k ) ] ] whose frequency domain relation with the original system h ( n ) is
H ( k )H i ( k ) = 1
or, H i ( k ) = 1 ⁄ H ( k )
(2)
BIOSIGNAL 2004
i.e, the filter h i ( n ) is the inverse filter. The output of this inverse filter z ( n ) = F –1 [ Z ( k ) ]
can be written as
Z ( k ) = Y ( k )H i ( k )
= [ E ( k )H ( k ) + W ( k ) ]H i ( k )
= E ( k )H ( k )H i ( k ) + W ( k ) H i ( k )
(3)
= E (k ) + Ew(k )
where Y ( k ) , E ( k ) and W ( k ) are the frequency domain representations of y ( n ) , e ( n ) and
w ( n ) . The frequency domain inverse filter can be found from [8]
1
1
H i ( k ) = ------------ = ----------------------------------------------(4)
H (k)
H ( k ) exp ( – jφ ( k ) )
Thus the frequency domain inverse filter can be estimated if the frequency domain system
(or its Fourier magnitude H ( k ) and Fourier phase φ ( k ) ) is known. The Fourier magnitude
and Fourier phase of the blind system can be estimated using either the log-bispectrum [6], [7]
or cepstrum of bispectrum [5] based system recognition algorithm. Here we use the cepstrum
of bispectrum approach.
[8] applied the frequency domain form as (3) to estimate the input signal from the blind
system’s output signal. We also use the frequency domain form and then apply the inverse
Fourier transform to Z ( k ) to estimate the input signal e ( n ) with noise component e w ( n ) .
It is generally assumed in signal processing that the system noise is a random signal and, in
practice, its average amplitude is smaller than the typical impulse (firing pulses) amplitude. As
it is of interest to observe the nature of the firing pulses, a logical filter can be used to cut-off
noise level (up to any desired level). The logical filter uses the equation
{z(n)}
eˆo ( n ) =
0
ê ( n ) = M ( n ).z ( n )
r
if
r
{z(n)} ≥ tl
otherwise
1
where M ( n ) =
0
(5)
if eˆo ( n ) ≠ 0
otherwise
where r ≥ 2 is a parameter that sets the attenuation level and t l is the threshold level and
ˆ
e o ( n ) is the resulting estimated sequence of pulses. Note that the estimated input impulses
may not be the same as those of the actual system input if the threshold level is not chosen
accurately and also when any system input impulse level is below the threshold.
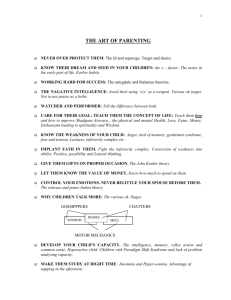
3. Results - Application of Input Signal Estimation Theory
Three fine wire EMG (wEMG) signals were used for estimating firing pulses. The EMG
signals were recorded from the Rectus Femoris (RF) muscle when the subject was seated with
30 degree hip flexion and had three different loads (0Kg, 1Kg and 2Kg) at the ankle. Applying
the above method to a one second duration EMG signal, three neuron firing sequences were
recovered and are plotted in Fig. 2. In all cases, the cepstrum of bispectrum based system
estimation followed by inverse filtering was used. Moreover, for each application of the logical
filter, the attenuation level was same i.e., r = 2 and the threshold level was fixed.
4. Discussion and Conclusion
It is observed from Fig. 2 that the number of neuron firing pulses becomes higher when the
load on the subject increases. Again, [4] reported that the shape of the MUAP in EMG signals
when different loads are applied to the same muscle remains similar and differs from the
BIOSIGNAL 2004
CAB − RF wEMG (HF 30 degree and 1.13 KG load)
CAB − RF wEMG (HF 30 degree and No load)
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
0
0.25
0.5
0.75
0
1
0.25
0.5
0.75
1
(b)
(a)
CAB − RF wEMG (HF 30 degree and 2.26 KG load)
1
0.5
0
−0.5
−1
0
0.25
0.5
0.75
1
(c)
Fig. 2: Neuron firing pulses observed in the wEMG signal from Rectus Femoris muscle at hip
flexion to 30 degree and the subject has (a) no load, (b) 1.13 Kg and (c) 2.26 Kg.
resting muscle’s MUAP. Therefore, it can be concluded that when a subject increases effort to
do more work, the rate of neuron firing increases.
References
[1] Carlo J. De Luca, “Physiology and Mathematics of Myoelectric Signals”, IEEE Trans.
Biomed. Eng., 1979; BME-26:313-325.
[2] Kazuo Y., Hiroshi M, Hiroyuki M. and Noriko T., “Bispectral Analysis of Filtered Impulse
Processes with Applications to the Analysis of Bioelectric Phenomena”, Workshop on
Higher-Order Spectral Analysis, 1989; 140-145.
[3] Kaplanis P.A., Pattichis C. S., Hadjileontiadis L. J. and Panas S. M. “Bispectral Analysis
of Surface EMG”, 10th Mediterranean Electrotechnical Conference, 2000; II:770-773.
[4] Shahid, S., Higher Order Statistics Techniques Applied to EMG Signal Analysis and
Characterization, Ph.D. Thesis (submitted), University of Limerick, Ireland. 2003.
[5] Shahid, S. and Walker J., “The Complex Cepstrum of Bispectrum for system
Reconstruction with Application to sEMG Signal”, Proc. of the Irish Signals and Systems
Conf., 2003; 230-235.
[6] Shahid, S. and Walker J., “Application of Bispectrum Based Signal Reconstruction to
sEMG Signal”, Proc. of the Irish Signals and Systems Conf., 2001; 407-411.
[7] Rangoussi, M., and Giannakis G. B., “FIR Modeling Using Log-Bispectra: Weighted
Least-Squares Algorithms and Performance Analysis”, IEEE Trans. on Circuits and
Systems, 1991; 38:281-296.
[8] Hinich, M. J and Shichor E., “Bispectral Analysis of Speech”, Proc. of the 17th
Convention of Electrical and Electronics Engineers in Israel, 1991; 357-360.