Continuous and Discontinuous Finite Element Methods for
advertisement
Continuous and Discontinuous Finite Element Methods for
Convection-Diffusion Problems: A Comparison
Andrea Cangiani∗, Emmanuil H. Georgoulis† and Max Jensen
‡
June 30, 2006
Abstract
We compare numerically the performance of a new continuous-discontinuous finite element method
(CDFEM) for linear convection-diffusion equations with three well-known upwind finite element formulations, namely with the streamline upwind Petrov-Galerkin finite element method, the residualfree bubble method and the discontinuous Galerkin finite element method. The defining feature of the
CDFEM is that it uses discontinuous approximation spaces in the vicinity of layers while continuous
FEM approximation are employed elsewhere.
1
Introduction
Standard conforming finite element approximations of convection-dominated convection-diffusion
problems often exhibit poor stability properties that manifest themselves as non-physical oscillations polluting the numerical solution. Various techniques have been proposed for the stabilization
of finite element methods (FEMs) for convection-diffusion problems; for a complete survey see, for
example, Morton [22] and Roos, Stynes and Tobiska [23]. Common techniques are exponential fitting,
symmetrization, upwinding and least squares regularization. Ad hoc meshing, like graded meshes [24]
and Shishkin type meshes [21], and adaptive mesh refinement (see, e.g., [12], [4], [1] and [16]) are
also well-established branches of the subject. Furthermore, bubble stabilization [7, 14] and the closely
related variational multiscale methods [18] constitute an illuminating way of reinterpreting many of
the techniques just mentioned.
During the last decade, families of discontinuous Galerkin finite element methods (DGFEMs) have
been proposed for the numerical solution of convection-diffusion problems, due to the many attractive
properties they exhibit. In particular, DGFEMs admit good stability properties, they offer flexibility
in the mesh design (irregular meshes are admissible) and in the handling of boundary conditions
(Dirichlet boundary conditions are weakly imposed). Furthermore they are increasingly popular in
the context of hp-adaptive algorithms.
Hovewer, discontinuous Galerkin methods involve more degrees of freedom than the same order
conforming finite element schemes. Indeed, a discontinuous finite element space Vh of affine elements
contains up to four times more degrees of freedom for two-dimensional problems and up to eight
times more degrees of freedom for three-dimensional problems compared to the (unstable) standard
finite element or SUPG formulations, without any improvement in the order of accuracy.
Therefore, a natural question arising is whether it is possible to reduce the additional degrees
of freedom required by the DGFEMs without affecting their good stability properties. There have
already been attempts in this direction which can be roughly grouped into two categories. The
first category consists of the so-called multi-scale approach due to Hughes et. al. [9], in which
the discontinuous finite element space is decomposed into continuous and discontinuous degrees of
freedom, which are treated as coarse and fine spaces, respectively, in a multi-scale fashion. Local
problems are solved on each element to project from the “fine” space to the “coarse” space. The
second category revolves around the idea of identifying classes of elements which globally result in
approximation spaces lying between the continuous and discontinuous finite element spaces, e.g. [3].
∗ Departmento
di Mathematica, Universita’ di Pavia, Via Ferrata 1, 27100 Pavia, Italy, e-mail:
andrea.cangiani@unipv.it
† Department of Mathematics, University of Leicester, University Road, Leicester LE1 7RH, United Kingdom, e-mail:
Emmanuil.Georgoulis@mcs.le.ac.uk
‡ Humboldt-Universität zu Berlin, Institut für Mathematik, Unter den Linden 6, 10099 Berlin, Germany , e-mail
jensenm@math.hu-berlin.de
1
This work proposes a new finite element discretization which provides the advantages of discontinuous Galerkin methods while only requiring marginally more degrees of freedom than conforming
schemes. The underlying observation is that for (linear) convection-diffusion problems stabilization
is only required locally near layers of the solution. Taking into account that for physically relevant
solutions layers make up only a relatively small part of the domain, we employ a standard unstabilised
finite element scheme away from layers while investing in the more expensive DGFEM in the vicinity
of layers.
The performance of this new continuous-discontinuous finite element method (CDFEM) is tested
through numerical experiments and compared with the DG method and two well-known conforming
methods, namely the SUPG and the RFB finite element methods. For completeness, the formulations
of the latter methods are included along with a discussion on the computational characteristics of
each of them.
This note is organized as follows. In Section 2 we state the model problem; Section 3 contains
the function space framework and the construction of the finite element spaces. Sections 4, 5, and 6,
contain brief descriptions of SUPG, RFB, and discontinuous Galerkin finite element methods. Section
7 introduces the new continuous-discontinuous finite element method and in Section 8 some numerical
experiments are presented. Concluding remarks are given in Section 9.
2
Model Problem
Let Ω be a bounded open polyhedral domain in R2 , and let Γ∂ signify the union of its one-dimensional
open edges. We consider the steady state convection-diffusion equation
Lu ≡ −ǫ∆u + b · ∇u = f
in Ω,
(1)
where f ∈ L2 (Ω), and b = (b1 , b2 )T , whose entries bi , i = 1, 2, are Lipschitz continuous real-valued
functions on Ω. For simplicity of the presentation, we assume homogeneous Dirichlet boundary
conditions on ∂Ω.
3
Finite Element Spaces
We shall denote by H s (Ω) the standard Hilbertian Sobolev space of index s ≥ 0 of real-valued
functions defined on Ω.
Let T be a subdivision of Ω into disjoint open elements κ ∈ T such that each edge of κ has at most
one regular hanging node. We let hκ := diam(κ̄). We assume that the subdivision T is constructed
via mappings Fκ where Fκ : κ̂ := (−1, 1)2 → κ is a C1 -diffeomorphism with non-singular Jacobian.
It is assumed that Ω̄ = ∪κ∈T κ̄.
By Γ we denote the union of all one-dimensional element faces associated with the subdivision
T including edges on the boundary. We assign to the subdivision T the broken Sobolev space of
composite order s := {sκ : κ ∈ T }
H s (Ω, T ) := u ∈ L2 (Ω) : u|κ ∈ H sκ (κ) for all κ ∈ T
,
equipped with the standard broken Sobolev norm. When sκ = s for all κ ∈ T , we write H s (Ω, T ).
For a nonnegative integer p we denote by Qp (κ̂) the set of all tensor-product polynomials on
κ̂ of degree p in each coordinate direction. For simplicity of the presentation we assume constant
polynomial degree p ≥ 1 throughout the mesh. Then, the continuous and discontinuous finite element
spaces are defined by
Vhc := {v ∈ C 0 (Ω) : v|κ ◦ Fκ ∈ Qp (κ̂), κ ∈ T }
(2)
and
Vhd := {v ∈ L2 (Ω) : v|κ ◦ Fκ ∈ Qp (κ̂), κ ∈ T }
respectively. Note that
4
Vhc
1
⊂ H (Ω) and
Vhd
(3)
1
⊂ H (Ω, T ).
Streamline Upwind Petrov-Galerkin FEM
The weak formulation of the homogeneous problem (1) reads
find u ∈ H01 (Ω) such that Bc (u, v) = l(v)
Z
where
ǫ∇u · ∇v + b · ∇u)v dx,
Bc (u, v) :=
Ω
∀ v ∈ H01 (Ω),
Z
and
l(v) :=
f v dx.
Ω
2
(4)
(5)
The Galerkin FEM formulation is defined by restricting (11) onto the continuous finite element space
Vhc . Such method is unstable when the convective term dominates unless the mesh size is of the same
order as the smaller scales present in the solution. Numerical instabilities are indeed observed when
the mesh Péclet number P eκ := hκ ||b||∞,κ /2ε > 1 for elements κ in the neighbours of boundary and
internal layers.
The streamline upwind Petrov–Galerkin (SUPG) method was introduced by Hughes and Brooks [19]
(see also Johnson and Nävert [20] and Hughes and Brooks [8]). In order to obtain a stable method,
a diffusion term in the direction of convection is added to the standard Galerkin formulation. The
SUPG-FEM reads: find uh ∈ Vhc such that
Bc (uh , vh ) +
X
τκ (Luh , b · ∇vh )κ = l(vh ) +
κ∈T
X
τκ (f, b · ∇vh )κ
∀vh ∈ Vhc ;
(6)
κ∈T
The term (b · ∇uh , b · ∇vh ) is added in order to suppress
the nonphysical numerical oscillations which
P
would otherwise arise. The addition of the term κ∈T τκ (f, b · ∇vh )κ in the linear form ensures the
consistency of the method.
In general, the SD–parameter τκ depends both on the mesh size and on the mesh Péclet number.
A typical choice for the SUPG method, taken from [23], is
τκ =
τ0 hκ if P eκ > 1 (convection–dominated case)
τ1 h2κ ε if P eκ ≤ 1 (diffusion–dominated case),
(7)
Under appropriate assumptions the SUPG method satisfies with this choice of τκ a global error
estimate of the form
||u − uh ||SD ≤ C ε1/2 + h1/2 hk |u|H k+1 (Ω) ,
(8)
where the SD–norm is defined as
||v||SD :=
ε|v|21
+
X
!1/2
τκ kb ·
∇vk2L2 (κ)
.
κ∈T
The definition of τκ given by (7) states that where the problem is convection–dominated the SD–
parameter should be proportional to the element size hκ . Still the problem of identifying an optimal
value of τκ , in the sense of providing a sharp, non–oscillatory approximation in the layers, is left open.
Indeed, the value for τ0 and τ1 is not implied by the a priori analysis.
The difficulty encountered with the problem of parameter identification may be seen as a consequence of the lack of physical justification of stabilized methods based on the notion of relevant
scales.
Indeed, one of the reasons for the success of two–level or subgrid scale methods such as the
variational multiscale method previously mentioned, the local Green’s function approach, see [18],
and the residual–free bubble method, is that they can provide the required theoretical foundation to
classical stabilization techniques. The residual-free bubble method, as an example, is briefly described
in the next section.
5
Residual-Free Bubble Method
The residual-free bubble method of Brezzi and Russo [7], and Franca and Russo [14], was analyzed
in [6].
Let Γ signify the skeleton of the partition T , i.e. the union of the boundaries of all elements in
κ ∈ T . The residual free bubble (RFB) space VRF B is defined by augmenting Vhc with the space of
bubbles, which are the functions with support in Ω \ Γ:
VRF B = Vhc + Bh ,
where
Bh =
M
H01 (κ).
κ∈T
In the enriched space VRF B fine scales of the boundary value problem can be resolved at the elemental
level. The RFB method is the Galerkin formulation (11) on VRF B , namely
(
find uRF B ∈ VRF B such that
Bc (uRF B , v) = l(v)
3
∀v ∈ VRF B .
(9)
Starting from (9), a two–level procedure is obtained by splitting the solution into its polynomial
component uh ∈ Vhc and bubble component ub ∈ Bh and by testing separately in Vhc and Bh . At the
subgrid level the bubble component of the solution is obtained by solving the bubble equation
Bc (ub , v) = l(v) − Bc (uh , v)
∀v ∈ Bh .
It is important that this can be done locally. Formally one has
ub |κ = L−1
κ (f − Luh )|κ
∀κ ∈ T .
The second step consists of solving for the polynomial component, which satisfies the equation
Bc (uh , vh ) +
XZ
κ∈T
∗
L−1
κ (f − Luh )L vh dx = l(vh )
∀vh ∈ Vh ;
(10)
κ
here L∗ is the differential operator adjoint to L. Thus the RFB method consists of a local fine scale
approximation and a global coarse scale approximation. We can also interpret the formulation (10)
as a stabilised method in terms of the Vhc finite element space only.
In practice, the actual computation of the bubble, hidden here in the formal local inversion of L,
is carried out numerically by introducing a subgrid. In this way a fully discrete procedure is obtained.
The choice of the subgrid dictates which fine scales are incorporated into the coarse scale formulation.
Cheap subgrid solves can be employed without compromising stability and accuracy of the stabilised
formulation [7, 5]. Thus, in terms of computational cost, the stabilised RFB formulation (10) is
comparable to the SUPG formulation. We refer, e.g., to [10] for details on the implementation of the
method.
6
Discontinuous Galerkin Finite Element Method
The definition of the discontinuous Galerkin method requires the introduction of interelemental
boundary operators. Let κ, κ′ be two elements sharing a common face e := κ̄ ∩ κ̄′ . Define the
outward normal unit vectors n+ and n− on e corresponding to ∂κ and ∂κ′ , respectively. For functions q : Ω → R and φ : Ω → R2 that may be discontinuous across Γ, we define the traces q + := q|∂κ ,
q − := q|∂κ′ and φ+ := φ|∂κ , φ− := φ|∂κ′ . We then set
{q}
} :=
1 +
1
(q + q − ), {φ}
} := (φ+ + φ− ), [ q]] := q + n+ + q − n− , [ φ]] := φ+ · n+ + φ− · n− .
2
2
If e is instead an internal edge these definitions are modified to
φ+ := φ|∂Ω , {q}
} := q + , {φ}
} := φ+ , [ q]] := q + n, [ φ]] := φ+ · n.
Further, we decompose the skeleton of T into the subsets
∂− κ := {x ∈ ∂κ : b(x) · n(x) < 0},
∂+ κ := {x ∈ ∂κ : b(x) · n(x) > 0},
where n(·) denotes the unit outward normal vector function associated with the element κ. We call
∂− κ and ∂+ κ the inflow and outflow parts of ∂κ respectively.
Then, for every element κ ∈ T , we denote by u+
κ the trace of a function u on ∂κ taken from within
1
the element κ (interior trace). We also define the exterior trace u−
κ of u ∈ H (Ω, T ) for almost all
+
′
x ∈ ∂− κ\Γ∂ to be the interior trace uκ′ of u on the element(s) κ that share the edges contained in
∂− κ\Γ∂ of the boundary of element κ. Then, the upwind jump of u across e ⊂ ∂− κ\Γ∂ is defined by
−
⌊u⌋e := u+
κ − uκ ,
and ⌊u⌋e = u+ for e ⊂ Γ∂ . We note that this definition of jump is not the same as the one above;
here the sign of the jump depends on the direction of the flow, whereas [ ·]] depends only on the
element-numbering.
We note that the subscript in this definition will be suppressed when no ambiguity can occur.
The broken weak formulation of the homogeneous problem (1), from which the interior penalty
DGFEM emerges, reads
find u ∈ A such that B(u, v) = l(v)
where
∀ v ∈ H 3/2+ε (Ω, T ),
A := {u ∈ H 3/2+ε (Ω, T ) : u, ∇u · ν are continuous across Γint },
4
(11)
B(u, v) :=
X Z
κ∈T
Z
Z
(b · n)⌊u⌋v + ds
ǫ∇u · ∇v + (b · ∇u)v dx −
κ
∂− κ
θ{
{ǫ∇v}
} · [ u]] − {ǫ∇u}
} · [ v]] + σ[[u]] · [ v]] ds,
+
Γ
and l(·) as above, for θ ∈ {−1, 0, 1}. The function σ is hereby defined as
σ|e := Cσ
ǫp2
,
he⊥
|κ| + |κ′ |
, for e ⊂ κ̄ ∩ κ̄′ , and Cσ is a sufficiently large positive constant, and ε > 0.
2|e|
The interior penalty DGFEM for the homogeneous problem (1) is defined by:
where he⊥ =
find uDG ∈ Vhd such that B(uDG , v) = l(v)
∀v ∈ Vhd .
(12)
We refer to the method with θ = −1 as the symmetric interior penalty DGFEM (SIPG), as the
incomplete interior penalty DGFEM (IIPG) and for θ = 1 as the non-symmetric interior penalty
DGFEM (NIPG). This terminology stems from the fact that when b ≡ ~0, the bilinear form B(·, ·) is
symmetric if and only if θ = −1. Various types of error analysis for the variants of interior penalty
DGFEMs can be found in [2, 17, 15]. See also the references therein.
It is widely observed in numerical experiments that discontinuous Galerkin finite element methods
exhibit good stability properties in the presence of sharp gradients of the solution. This can be
explained by the essentially parameter-free upwinding in form of the upwinded jump included in the
second integral on the right-hand side of (12)).
We further note that the only user-defined parameter in the DGFEM formulation is the coefficient
of the discontinuity-penalization function σ. However, various numerical experiments have shown that
the stability and accuracy of the method is only mildly dependent on σ ( e.g. cf. [11]).
However, it needs to be taken into account that the approximation spaces of discontinuous Galerkin
methods have more degrees of freedom than corresponding continous spaces. We remark that due
to the enlargement of the approximation space the function b̄.∇vh for any piecewise constant b̄ is
an admissible test function. This term, of similar structure as the SUPG stabilization, plays an
important role in the proof of stability of the DGFEM [17, 9].
As pointed out in the introduction, the discontinuous finite element space Vhd contains for bilinear
elements up to four times more degrees of freedom for two-dimensional problems and up to eight
times more degrees of freedom for three-dimensional problems compared to the continuous FEM
formulations.
Hence, the question arises as how to design a stable essentially parameter-free method which has
less computational overhead than the DGFEM. In the next section we propose a new finite element
method that blends continuous and discontinuous approximations in order to achieve the desired
accuracy and stability with reduced computational cost.
7
Continuous-Discontinuous FEM
The domain Ω is now subdivided into two parts Ωc and Ωd := Ω\Ωc such that all elements κ ∈ T
are subsets of either Ωc or Ωd . We define the finite element space
Vhd (Ωc ) := {vh ∈ Vhd such that [ vh ] e = 0, for all e ⊂ Ωc },
i.e., the space of element-wise polynomials that are continuous across the interfaces in Ωc . Notice
that we have
Vhc = Vhd (Ω) and Vhd = Vhd (∅).
The continuous-discontinuous FEM (CDFEM) for the homogeneous problem (1) is
find uCD ∈ Vhd (Ωc ) such that B(uCD , v) = l(v)
∀ v ∈ Vhd (Ωc ),
(13)
where B and l are the bilinear and linear form of the DG method restricted to Vhd (Ωc ).
As for the DG method we refer to the CDFEM with θ = −1 as the symmetric interior penalty
CDFEM, for θ = 0 the DGFEM is referred as the incomplete interior penalty CDFEM whereas for
θ = 1 the DGFEM will be referred to as the non-symmetric interior penalty CDFEM.
Clearly, the finite element space Vhd (Ωc ) has substantially smaller dimension than Vhd when Ωc
is large. Motivated by the hypothesis that stabilization is only required when sharp gradients are
present in the solution, we can define Ωc to contain all the elements κ ∈ T that are located away
from neighbourhoods of boundary and interior layers. That way, the CDFEM offers the stabilization
5
2
2
1.5
1.5
1
1
0.5
1 0.5
0.8
0.6
0
0.4
0
0.2
0
0
0.2
0.4
0.6
0.8
0
1
0.2
0.4
0.6
(a) SUPG
0.8
0
1
1
0.8
0.6
0.4
0.2
(b) RFB
2
2
1.5
1.5
1
1
1 0.5
0.5
1
0.8
0.8
0.6
0
0
0.6
0
0
0.4
0.2
0.4
0.2
0.6
0.8
1
0.4
0.2
0.4
0
(c) DGFEM
0.2
0.6
0.8
1
0
(d) CDFEM
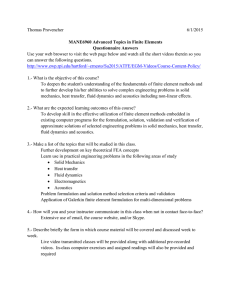
Figure 1: Example with f = 1, ǫ = 10−2 on a 10 × 10 grid.
advantages of DGFEM without the extra degrees of freedom of DGFEM in subregions of the computational domain where the solution is smooth independent of ε. Moreover, considering that for
convection-diffusion problems these sharp gradients and layers are of (d − 1)-dimensional nature, the
potential computational gain of this approach is evident.
In the next section, we compare the stability of SUPG, RFB, DGFEM and CDFEM numerically.
For a proof of stability of the CDFEM for convection-diffusion problems can be found in [11].
8
Numerical Experiments
We consider two numerical examples with constant wind b: one with homogeneous boundary conditions and one with non-homogeneous boundary conditions. In particular, we consider (1) on
Ω = (0, 1)2 with ǫ = 10−2 , 10−3 and b = (1, 1)T for two different choices of f and Dirichlet data.
In the first numerical example, we have u = 0 on ∂Ω and f = 1. The solution exhibits boundary
layers along x = 1 and y = 1. These layers become steeper as ǫ → 0. We consider a 10 × 10 uniform
subdivision of the computational domain in rectangular elements and consider piecewise bilinear
finite elements. For CDFEM we set Ωc = (0, 0.8)2 . In Figure 1 the computed solutions are given. We
observe that the CDFEM does not suffer from increased numerical oscillations compared to DGFEM.
For comparison, the RFB and SUPG solutions are also shown. The SUPG parameter τ0 was set to
the value (1 − 1/P eκ )/2 proposed in [13]. As for the RFB method, only the piecewise bilinear part
of the solution is plotted.
In the second numerical example Dirichlet boundary conditions and the forcing function f are
chosen such that the analytical solution is
1
u(x, y) = x + y(1 − x) +
e− ǫ − e−
(1−x)(1−y)
ǫ
1
1 − e− ǫ
.
As before the solution exhibits boundary layer behaviour along x = 1 and y = 1, and the layers
6
1.4
1.4
1
1
0.5
0
0
0.5
0.2
0.4
0.6
0.8
0
1
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
(a) SUPG
0.6
0.8
0
1
1
0.8
0.6
0.4
0.2
(b) RFB
1.4
1.4
1
1
0.5
0.5
1
1
0.8
0.8
0.6
0
0
0.6
0
0
0.4
0.2
0.4
0.2
0.6
0.8
1
0
(c) DGFEM
0.4
0.2
0.4
0.2
0.6
0.8
1
0
(d) CDFEM
Figure 2: Example with non-homogeneous boundary conditions, ǫ = 10−2 on a 10 × 10 grid.
become steeper as ǫ → 0.
Figure 2 shows that again CDFEM, with Ωc = (0, 0.8)2 , delivers solutions comparable to those of
the discontinuous Galerkin method.
9
Concluding Remarks
We compared numerically the performance of three well-known stable finite element formulations
(namely SUPG, RFB, DGFEM) to the new CD finite element method. The CDFEM is a continuous
Galerkin method in smooth parts of the domain while a Galerkin method of discontinuous type
in the vicinity of internal and boundary layers on non-resolving grids. While in the presentation
of the method given here the layer location has to be known a priori to set up the finite element
space, it is our aim to control the composition of the approximation space automatically by adaptive
algorithms driven by a posteriori knowledge. Hereby one not only wants to increase the accuracy
of the numerical method, but also to ensure the stability properties on non-resolving grids without
investing in unnecessary degrees of freedom; we refer to [11] for details.
References
[1] Ainsworth, M., and Oden, J. T. A posteriori error estimation in finite element analysis. Pure
and Applied Mathematics (New York). Wiley-Interscience [John Wiley & Sons], New York, 2000.
[2] Arnold, D. N. An interior penalty finite element method with discontinuous elements. SIAM
J. Numer. Anal. 19 (1982), 742–760.
[3] Becker, R., Burman, E., and Hansbo, P. Larson, M. A reduced p1-discontinuous Galerkin
method. EPFL Preprint 05 (2004).
7
[4] Becker, R., and Rannacher, R. A feed-back approach to error control in finite element
methods: basic analysis and examples. East-West J. Numer. Math. 4, 4 (1996), 237–264.
[5] Brezzi, F., Hauke, G., Marini, L. D., and Sangalli, G. Link-cutting bubbles for the
stabilization of convection-diffusion-reaction problems. Math. Models Methods Appl. Sci. 13, 3
(2003), 445–461. Dedicated to Jim Douglas, Jr. on the occasion of his 75th birthday.
[6] Brezzi, F., Marini, D., and Süli, E. Residual-free bubbles for advection-diffusion problems:
the general error analysis. Numer. Math. 85, 1 (2000), 31–47.
[7] Brezzi, F., and Russo, A. Choosing bubbles for advection-diffusion problems. Math. Models
Methods Appl. Sci. 4, 4 (1994), 571–587.
[8] Brooks, A. N., and Hughes, T. J. R. Streamline upwind/Petrov-Galerkin formulations
for convection dominated flows with particular emphasis on the incompressible Navier-Stokes
equations. Comput. Methods Appl. Mech. Engrg. 32, 1-3 (1982), 199–259. FENOMECH ’81,
Part I (Stuttgart, 1981).
[9] Buffa, A., Hughes, T., and Sangalli, G. Analysis of a multiscale discontinuous galerkin
method for convection diffusion problems. ICES Report 05-40 (2005), to appear on SIAM J.
Numer. Anal..
[10] Cangiani, A. The residual-free bubble method for problems with multiple scales. D.Phil.
Thesis, University of Oxford (2004).
[11] Cangiani, A., Georgoulis, E. H., and Jensen, M. Continuous-discontinuous finite element
methods for convection-diffusion problems. in preparation.
[12] Eriksson, K., Estep, D., Hansbo, P., and Johnson, C. Introduction to adaptive methods for
differential equations. In Acta numerica, 1995, Acta Numer. Cambridge Univ. Press, Cambridge,
1995, pp. 105–158.
[13] Fischer, B., Ramage, A., Silvester, D. J., and Wathen, A. J. On parameter choice
and iterative convergence for stabilised discretisations of advection-diffusion problems. Comput.
Methods Appl. Mech. Engrg. 179, 1-2 (1999), 179–195.
[14] Franca, L. P., and Russo, A. Deriving upwinding, mass lumping and selective reduced
integration by residual-free bubbles. Appl. Math. Lett. 9, 5 (1996), 83–88.
[15] Georgoulis, E. H., and Süli, E. Optimal error estimates for the hp–version interior penalty
discontinuous Galerkin finite element method. IMA J. Numer. Anal. 25, 1 (2005), 205–220.
[16] Giles, M. B., and Süli, E. Adjoint methods for PDEs: a posteriori error analysis and postprocessing by duality. Acta Numer. 11 (2002), 145–236.
[17] Houston, P., Schwab, C., and Süli, E. Discontinuous hp-finite element methods for
advection-diffusion-reaction problems. SIAM J. Numer. Anal. 39, 6 (2002), 2133–2163 (electronic).
[18] Hughes, T. J. R. Multiscale phenomena: Green’s functions, the Dirichlet-to-Neumann formulation, subgrid scale models, bubbles and the origins of stabilized methods. Comput. Methods
Appl. Mech. Engrg. 127, 1-4 (1995), 387–401.
[19] Hughes, T. J. R., and Brooks, A. A multidimensional upwind scheme with no crosswind diffusion. In Finite element methods for convection dominated flows (Papers, Winter Ann. Meeting
Amer. Soc. Mech. Engrs., New York, 1979), vol. 34 of AMD. Amer. Soc. Mech. Engrs. (ASME),
New York, 1979, pp. 19–35.
[20] Johnson, C., and Nävert, U. An analysis of some finite element methods for advectiondiffusion problems. In Analytical and numerical approaches to asymptotic problems in analysis
(Proc. Conf., Univ. Nijmegen, Nijmegen, 1980), vol. 47 of North-Holland Math. Stud. NorthHolland, Amsterdam, 1981, pp. 99–116.
[21] Madden, N., and Stynes, M. Efficient generation of Shishkin meshes in solving convectiondiffusion problems. Preprint of the Department of Mathematics, University College, Cork, Ireland
no. 1995-2 (1995).
[22] Morton, K. W. Numerical solution of convection-diffusion problems, vol. 12 of Applied Mathematics and Mathematical Computation. Chapman & Hall, London, 1996.
[23] Roos, H.-G., Stynes, M., and Tobiska, L. Numerical Methods for Singularly Perturbed
Differential Equations. Springer-Verlag, Berlin, 1996.
[24] Schwab, C., and Suri, M. The p and hp versions of the finite element method for problems
with boundary layers. Math. Comp. 65, 216 (1996), 1403–1429.
8
 0
0
advertisement



Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users