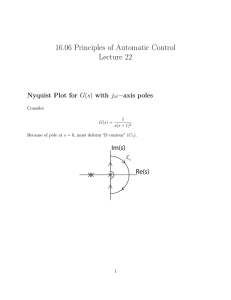
Nyquist Stability Criterion Component Vectors
advertisement

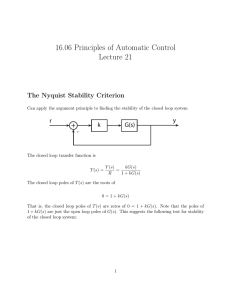
Why use the Nyquist Criterion? Answers the questions: Q1. Are there any closed-loop poles in the RHP? Nyquist Stability Criterion Q2. If the answer to Q1 is yes, then how many? M. Sami Fadali Professor of Electrical Engineering University of Nevada + ( ) ( ) 1 Component Vectors Closed-loop Characteristic Equation • Zeros of are closed-loop poles • Poles of are open-loop poles 2 • For any value of the complex number , each component is a vector • Pole/zero at s 3 Contour Mapping Contour • Contour = closed directed simple (does not cross itself) curve. • Consider the angle change for as traverses a known contour D. • Change in = sum of angle changes for its zeros − sum of angle changes of its poles. D 5 6 Angle Change for Pole/Zero Location • Zero net angle change for pole/zero outside the contour. encirclement = net angle change for zero/pole inside the contour, respectively. s+a b s + b Zeros/Poles of =closed-loop/open-loop poles No. Encirclements of origin = (No. closed-loop poles inside contour) (No. open-loop poles inside contour) D a 7 8 Nyquist Contour Mapping of • Encloses all RHP poles and zeros of Assume real coefficients • Plot • Use net angle change to determine stability • Plot = polar plot. = complex conjugate of polar plot = mirror image of polar plot , large |s| 9 10 Principle of the Argument Stability Results • If F(s) = 1 + L(s) has Z zeros and P poles inside the Nyquist contour (in RHP), a plot of F(s) as s travels once (clockwise) around the contour encircles the origin of the complex plane in which it is plotted (N) times where (N) = Z P = no. of clockwise encirclements i.e. N = P Z = no. of counterclockwise encirclements 11 (i) For stability (no closed-loop poles in the RHP) Z=0 i.e. N = P For an open-loop stable system (P = 0), N = 0 (ii) For an unstable system (Z 0) Z=PN = number of closed-loop poles in the RHP (iii) Number of encirclements of the origin by F(s) = 1 + L(s) = number of encirclements of (1,0) by L(s) 12 Nyquist Plot Nyquist Stability Criterion Unity shift Necessary and sufficient condition for the closed-loop stability of the loop gain L(s) is: Nyquist Diagram 2.5 2 = no. of counterclockwise encirclements of (1,0) by L(s) 1 0.5 0 = no. of RHP open-loop poles of L(s) -0.5 -1 -1.5 Note: Closed-loop stability is when -2 -2.5 -1 0 1 2 Real Axis 3 4 5 13 14 Open-loop Unstable System RHP Closed-loop Poles K 1: N 0 K 4: N 1 1. For an unstable system, the number of closedloop system poles in the RHP = Z = P N 2. For open-loop stable systems (P = 0) (a) The system is stable with no (1,0) encirclements (b) Number of RHP poles for an unstable system = N = number of clockwise encirclements of (1,0) 15 Z 1 Z 0 Nyquist Diagram 1 K=4 0.8 0.6 0.4 Imaginary Axis Imaginary Axis 1.5 K=1 0.2 0 -0.2 -0.4 -0.6 -0.8 -1 -2 -1.8 -1.6 -1.4 -1.2 -1 Real Axis -0.8 -0.6 -0.4 -0.2 0 16 Root Locus: Open-loop Unstable System Nyquist Plot: 3rd Order, Type 0 Root Locus 1 0.8 Nyquist Diagram 10 0.6 0.2 6 -0.2 -0.4 Stable for -0.6 = 12 4 0 Imaginary Axis Imaginary Axis 8 System: g Gain: 2 Pole: 0.000592 Damping: -1 Overshoot (%): 0 Frequency (rad/sec): 0.000592 0.4 2 0 -2 K=2 -4 -6 -0.8 -1 -2.5 -8 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 Real Axis 17 -10 -4 -2 0 2 4 6 8 10 12 18 Real Axis Root Locus: 3rd Order, Type 0 Simplified Nyquist Criterion Root Locus 7 • Assume that the loop gain function has no RHP open-loop poles (i.e. P = 0). • Observer follows the polar plot of the loop gain in the direction of increasing frequency. • The closed-loop system is stable if and only if the point (1,0) is to the left of the observer. • Remark: The criterion implies no encirclements of (1,0) by the complete Nyquist plot. 6 System: g Gain: 10 Pole: 0.000796 + 3.32i Damping: -0.00024 Overshoot (%): 100 Frequency (rad/sec): 3.32 5 4 Imaginary Axis System: g Gain: 12 Pole: 0.12 + 3.53i Damping: -0.0339 Overshoot (%): 111 Frequency (rad/sec): 3.5 3 2 System: g Gain: 2 Pole: -0.781 + 1.86i Damping: 0.388 Overshoot (%): 26.7 Frequency (rad/sec): 2.01 1 0 -1 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 Real Axis 19 20 Example: Unstable System = +1 12 /2 + 1 Imaginary Poles /3 + 1 • Add a small semicircle around the origin for systems of type 1 • The small semicircle is mapped to l infinite semicircles traversed clockwise for a type l system. • Similarly, add a small semicircle around any imaginary axis pole. Nyquist Diagram 1 0 -1 Imaginary Axis -2 -3 -4 -5 -6 -7 -8 -9 -4 -2 0 2 4 Real Axis 6 8 10 12 21 22 Large Semicircles Modified Nyquist Contour • For small • Net rotation for • Denominator angle = • Transfer function angle = ( clockwise half circles) Discontinuities Poles outside contour Poles inside contour 23 24 Nyquist Plot: Type II, P = 0 Nyquist Plot: Type I, P = 0 = K ss 2 1 3 Nyquist Diagram 2 0 1.5 2 1 1 0.5 Imaginary Axis Imaginary Axis L( s ) = 0+ Nyquist Diagram 4 0 0 K L( s ) -0.52 s-1 s 2 1 -1 -2 = 0+ -3 -4 -1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -1.5 -0.2 -0.1 = 0 0 Real Axis -2 -35 -30 -25 -20 -15 -10 -5 0 Real Axis N 0 Type I: one clockwise half circle = 0 (no RHP open-loop poles) Z 0 Type II: two clockwise half circles 25 Simplified Nyquist: Type I P0 N 2 Z 2 26 Simplified Nyquist: Type II + 0 1.6 -1 1.4 -2 1.2 -3 1 -4 = -5 P=0 N=0 Stable /2 + 1 -6 -7 = 0.8 N≠0 Unstable /2 + 1 0.6 0.4 -8 0.2 -9 -10 -1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 -10 0 27 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 28 Nyquist Plot: Variable K Nyquist Plot: Variable K • Plot frequency response for a gain K = 1. • Count encirclements of the point 1/K. • Closed-loop characteristic equation Nyquist Diagram 0.2 0.15 • Divide equation by 0.1 Imaginary Axis 0.05 • Repeating earlier analysis gives the same replace by the results with the point point • Point moves as varies. System: g Real: -0.0164 Imag: 6.88e-005 Frequency (rad/sec): -3.35 0 -0.05 -0.1 1/Kcr = 1/60 -0.15 29 -0.2 -0.05 0 0.05 0.1 Real Axis 0.15 0.2 30