Document 13475656

16.06
Principles of Automatic Control
Recitation 7
Draw Nyquist plot for following system:
G p s q “ p s ` 10 q
2 p s ` 1 q
3
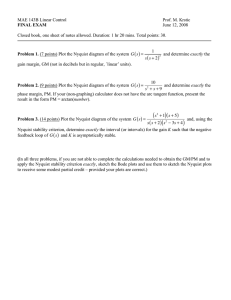
First put into Bode form:
LFA: slope “ 0 , 1 ¨ 1 “ 100 .
Break Points: 1 (triple), 10 (double).
First, sketch Bode plot
100 p s
10
` 1 q
2 p s ` 1 q
3
1
100
10
1
0.1
0.01
-3
0.1
1 10 100
-1
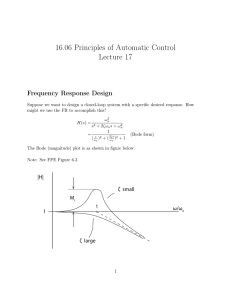
Now sketch Nyquist:
0.1
1 10 100
0
-90
-180
-270
-135 dB/dec
90 dB/dec
Im(G)
Re(G)
*Not drawn to scale
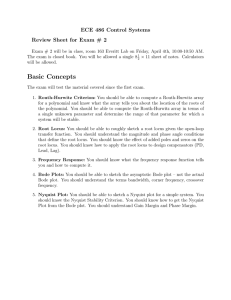
The Bode plot for the following system is sketched below: p s ´ 1 qp s ´ 5 q
p s 2
´ 2 s ` 2 qp s ` 10 q
Use the Bode plot to draw the Nyquist diagram for this system and determine the range of values of K for which the closed-loop system is stable.
In general let’s look at what is happening with phase:
Start out at 0 ˝ , then we get slightly negative, then go back to 0 ˝ , then increase to a maximum of about 25 ˝ , decrease back to 0 ˝ , keep decreasing to ´ 90 ˝ .
General behavior of magnitude
Important note: The magnitude plot is in dB so we have to convert it to magnitude: dB “ 20 log
10
1 ¨ 1
1 ¨ 1 “ 10 dB { 20
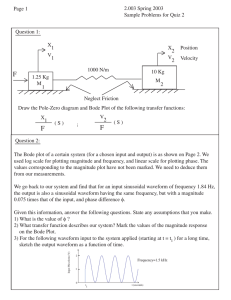
Nyquist Plot:
3
D
Im(G)
A
B
C
Re(G)
P “ # of open loop RHP poles
Z “ # of closed loop RHP zeros
N “ # of CW encirclements
Now we need to determine stability Z “ N ` P.
For stability we want Z “ 0 .
For this system, P “ 2 , so we need N “ ´ 2 for stability. This minus sign indicates CCW encirclements.
We label four different regions on the Nyquist plot (A,B,C,D) and see that we have N “ ´ 2 in region C.
1 ă ´ 1 { K ă 1 .
25
´ 1 ą 1 { K ą ´ 1 .
25
´ 1 ă K ă ´ 0 .
8
´ 1 ă K ă ´ 0 .
8 for stability.
4
MIT OpenCourseWare http://ocw.mit.edu
16.06
Principles of Automatic Control
Fall 20 1 2
For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms .