Lecture 6 – Outer Loop
advertisement

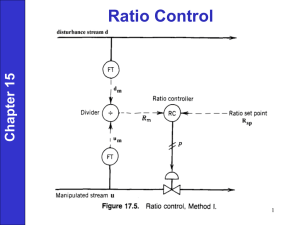
Lecture 6 – Outer Loop • • • • • Setpoint profile generation Gain scheduling Feedforward and 2DOF design System inversion problem Feedforward for simple models – Zero order, first order, second order, oscillatory (input shaping) • Iterative update of feedforward – Run-to-run, cascade loop EE392m - Spring 2005 Gorinevsky Control Engineering 6-1 Setpoint profile generation • Setpoint profile generation = path/trajectory planning • Changing setpoint acts as a disturbance for the feedback loop. • The closed-loop output follows the command accurately within the loop bandwidth • A practical approach: choose the setpoint command (path) as a smooth function that has no/little high-frequency components. • The smooth function can be a spline function etc yd(t) EE392m - Spring 2005 Gorinevsky Commanded output or setpoint Control Engineering Plant - Feedback controller cascasde loop 6-2 Setpoint profile • Real-time replay of a pre-computed reference trajectory yd(t) or feedforward v(t) • Reproduce a nonlinear function yd(t) in a control system ⎡ Y1 = yd (θ1 ) ⎤ ⎡θ1 ⎤ ⎢Y = y (θ ) ⎥ ⎢θ ⎥ Computed profile d 2 ⎥ ⎢ 2⎥ t yd(t) Y = ⎢ 2 Θ = , data arrays Y ,Θ M ⎢ ⎥ ⎢M⎥ ⎢ ⎥ ⎢ ⎥ = ( ) ⎣Yn yd θ n ⎦ ⎣θ n ⎦ On-line computations: 1. Find j, such that θ j ≤ t ≤ θ j +1 2. Compute linear interpolation θ j +1 − t t −θ j + Y j +1 yd (t ) = Y j θ j +1 − θ j θ j +1 − θ j EE392m - Spring 2005 Gorinevsky Control Engineering y Yj t θj 6-3 Linear interpolation vs. table look-up • Linear interpolation is more accurate than a table look-up • Requires less data storage • At the expense of simple computation EE392m - Spring 2005 Gorinevsky Control Engineering 6-4 Approximation • Interpolation: – compute function that will provide given values Y j in the nodes θ j • Approximation – compute function that closely corresponds to given data, possibly with some error – might provide better accuracy throughout y Yj t EE392m - Spring 2005 Gorinevsky θj Control Engineering 6-5 B-spline interpolation • 1st-order – look-up table, nearest neighbor • 2nd-order – linear interpolation yd (t ) = ∑ Y j B j (t ) j • n-th order: – Piece-wise n-th order polynomials, continuous n-2 derivatives – Is zero outside a local support interval – The support interval extends to n nearest neighbors EE392m - Spring 2005 Gorinevsky Control Engineering 6-6 B-splines • Accurate interpolation of smooth functions with relatively few nodes • For 1-D function the gain from using high-order B-splines is often not worth the added complexity • Introduced and developed in CAD for 2-D and 3-D curve and surface data • Are used for defining multidimensional nonlinear maps • All you need to know that B-splines are useful. Actually using them would require learning available software. EE392m - Spring 2005 Gorinevsky Control Engineering 6-7 Gain Scheduling Gain Schedule • Simple example y = f ( x ) + g ( x )u u u = − k ( x )( y − y d ) Controller Plant y yd • Control design requires k ( x) • The gain k is scheduled on x EE392m - Spring 2005 Gorinevsky Example: varying process gain Control Engineering 6-8 Gain scheduling Nonlinear • Single out several system regimes - model vec( A) ⎤ ⎡ linearization or ⎢ vec( B ) ⎥ experiments ⎥ Y =⎢ ⎢ vec(C ) ⎥ • Design linear controllers ⎢ ⎥ for these regimes vec( D ) ⎣ ⎦ • Approximate controller dependence on the regime parameters Linear interpolation: Y ( Θ) = ∑ Y jϕ j ( Θ) j EE392m - Spring 2005 Gorinevsky Control Engineering 6-9 Gain scheduling for aircraft • Flight control • Main trim condition parameters are used for scheduling • Shown – Approximation nodes – Evaluation points • Key assumption – Altitude and Mach are changing much slower than time constant of the flight control loop EE392m - Spring 2005 Gorinevsky Control Engineering 6-10 Feedforward Feedforward controller Plant Plant Feedback controller – this Lecture 6 • Main premise of the feedforward control: a – Lectures 3-5 model of the plant is known – Lectures 7-8 • Model-based design of feedback control - the same premise • The difference: feedback control is less sensitive to modeling error Plant • Common use of the feedforward: cascade with feedback Feedforward Feedback controller EE392m - Spring 2005 Gorinevsky Control Engineering controller 6-11 Why Feedforward? • Model-based design means we know the system in advance • The performance can be often greatly improved by adding open-loop control based on our system knowledge (models) EE392m - Spring 2005 Gorinevsky Control Engineering 6-12 Disturbance feedforward • Disturbance acting on the plant is measured • Feedforward controller can react before the effect of the disturbance shows up in the plant output Example: Temperature control • Measure ambient temperature and adjust heating/cooling • homes and buildings • district heating • industrial processes – growing crystals • electronic or optical components Disturbance Plant Feedforward controller EE392m - Spring 2005 Gorinevsky Feedback controller Control Engineering 6-13 Command/setpoint feedforward • The setpoint change acts as Examples: disturbance on the feedback loop. • Servosystems – Robotics • This disturbance can be measured – Aerospace • 2-DOF controller architecture • Process control – Feedback controller – Feedforward controller – Joint design – RTP • Propulsion (aero + auto) – Engine power demand Commanded output or setpoint Plant Feedforward controller - Feedback controller Cascade loop EE392m - Spring 2005 Gorinevsky Control Engineering 6-14 Feedforward as system inversion yd(t) Feedforward controller Plant u(t) y(t) y = P ( s )u • To get the output y = y d need to apply control u FF = [P ( s )] y d • Simple example – feedthrough system with known gain P( s ) = g y = gu + w −1 • System inverse and feedforward 1 1 −1 u FF = y d [P( s )] = g g EE392m - Spring 2005 Gorinevsky Control Engineering 6-15 Feedforward for 0th order model • Constant gain model (approximate) Step response for the design model: y = gu + w y(t)=gu(t) • There is a modeling error • It might be desirable to introduce low pass filtering such that high frequencies are not excited by the feedforward 1 1 u FF = ⋅ yd 1 + τs g EE392m - Spring 2005 Gorinevsky Control Engineering Actual step response 0 6-16 Setpoint Feedforward • Example: processor thermal control – Lecture 4, Slide 6 H (s) = FEEDFORW ARD ONLY 0.4 (5s + 1)(50 s + 1) 1 g = 0.4 u = u FF = 0.5 Feedforward: 1 yd g 0 0 20 40 60 80 100 120 140 P-CONTROL, NO FEEDFORW ARD 1 kP = 8 0.5 P-feedback: u = −k P ( y − y d ) 0 0 20 40 60 80 100 120 140 P-CONTROL AND FEEDFORWARD 1 Feedforward + P-feedback: u = − k P ( y − y d ) + u FF 0.5 EE392m - Spring 2005 Gorinevsky 0 0 20 40 Control Engineering 60 80 100 120 6-17 140 Feedforward for 1st order model • Simple 1st order model – integrator 1 y= u+w s • Inverse system = differentiator u FF ≈ sy d • Differentiating estimator (with low pass filtering) u FF EE392m - Spring 2005 Gorinevsky s = yd 1 + τs Control Engineering 6-18 Feedforward as system inversion y = P ( s )u ~ y (iω ) u~(iω ) = d P(iω ) y = yd ⇒ u = [P( s )] yd −1 • Issue – High-frequency roll-off of the frequency response – Attempting inversion would result at growing high-frequency gain 0 -5 -10 -15 -20 0.01 0.1 1 10 1 P( s ) = 1+ s [P( s)]−1 = 1 + s proper transfer function not proper • Approximate inverse solution: – ignore high frequency in some way EE392m - Spring 2005 Gorinevsky Control Engineering 6-19 Proper transfer functions • Proper means deg(Denominator) ≥ deg(Numerator) • Strictly proper ÅÆ high-frequency roll-off, all physical dynamical systems are like that • State space models are always proper • Exact differentiation is noncausal, non-proper Acceleration measurement example Attempted perfect control m&x& = u u = ma − k ( x − xd ) ⇒ x = xd EE392m - Spring 2005 Gorinevsky accelerometer a = &x& this is wrong! Control Engineering 6-20 Approximate Differentiation • Add low pass filtering: 1 1 ⋅ P ( s) = n (1 + τs ) P( s ) † Computed feedforward 1 τ = 0 .2 0.8 0.6 0.4 0.2 1 P( s ) = 1+ s 1 † ⋅ (1 + s ) P ( s) = 1 + τs 0 2 4 6 8 10 12 10 12 Desired and produced output 1 0.8 0.6 0.4 0.2 0 EE392m - Spring 2005 Gorinevsky 2 Control Engineering 4 6 8 6-21 Differentiation • Setpoint profile = path/trajectory planning • The derivative can be computed if yd(t) is known ahead of time (no need to be causal then). n 1 1 d y -1 [n] [n] P ( s ) yd = ⋅ n yd , yd (t ) = n (t ) P( s) s dt • This could be done by computing the profile yd(t) as an output of an integrator chain 1 1 k [k ] y d (t ) = n a (t ) y d (t ) = s y d (t ) = n −k a (t ) s s Example 1 Compute the setpoint P -1 ( s ) y d = s 2 y d = a (t ) P( s ) = 2 profile as a(t) s EE392m - Spring 2005 Gorinevsky Control Engineering 6-22 Double integrator example -3 1 • Double 0.5 integrator 0 -0.5 model -1 1 0 y= 2u s 0.02 0.015 • Setpoint 0.01 profile 0.005 1 0 yd = 2 a 0 s • Feedforward 1 u FF = a (t ) Example: Disk drive long seek. Move the R/W head a target track ACCELERATION x 10 20 40 60 80 100 80 100 VELOCITY 20 40 60 POSITION 0.5 Hara et at. IEEE Tr. on Mechatronics, March 2000 0 0 EE392m - Spring 2005 Gorinevsky 20 40 60 80 100 Control Engineering 6-23 Input Shaping: point-to-point control • Given initial and final conditions find control input • No intermediate trajectory constraints • Lightly damped, imaginary axis poles yd(t) – inversion methods do not work well Feedforward controller u(t) Plant Examples: • Disk drive long seek with flexible modes • Flexible space structures • Overhead gantry crane • FIR notch fliter – Seering and Singer, MIT – Convolve Inc. EE392m - Spring 2005 Gorinevsky Control Engineering 6-24 y(t) Pulse Inputs • Compute pulse inputs such that there is no vibration. • Works for a pulse sequence input • Can be generalized to any input EE392m - Spring 2005 Gorinevsky Control Engineering 6-25 Input Shaping as signal convolution • Convolution: EE392m - Spring 2005 Gorinevsky f (t ) * (∑ Aiδ (t − ti ) ) = ∑ Ai f (t − ti ) Control Engineering 6-26 Iterative update of feedforward Feedforward controller • Repetition of control tasks Plant Step-to-step feedback update • Robotics – Trajectory control tasks: Iterative Learning Control – Locomotion: steps • Batch process control – Run-to-run control in semiconductor manufacturing – Iterative Learning Control (IEEE Control System Magazine, Dec. 2002) EE392m - Spring 2005 Gorinevsky step Example: One-legged hopping machine (M.Raibert) Height control: yd = yd(t-Tn;a) h(n+1)=h(n)+Ga Control Engineering 6-27 More on Feedforward… • Iterative update – Iterative Learning Control, run-to-run update – Repetitive dynamics (repeating robotics mechanism motion) • Replay pre-computed sequences – Look-up tables, maps • Also used in practice – Servomechanism, disturbance model – Adaptive feedforward • LMS update • Sinusoidal disturbance tracking, e.g. in disk drives (related to PLL) EE392m - Spring 2005 Gorinevsky Control Engineering 6-28