Ch.2_ Single DoF
advertisement

Mechanical Vibrations
v
i
b
r
a
t
i
o
n
s
.
v
i
b
r
a
t
i
o
n
s
.
Introduction
1
2
v
i
b
r
a
t
i
o
n
s
.
Examples
v
i
b
r
a
t
i
o
n
s
.
Examples
v
i
b
r
a
t
i
o
n
s
.
Equation of motion
Equation of
motion
Newton's 2nd
law of
motion
Other
methods
D’Alembert’s
principle
Virtual
displacement
Energy
conservation
v
i
b
r
a
t
i
o
n
s
.
Newton's 2nd law of motion
Draw the
free-body
diagram
Apply
Newton s
second law
of motion
Determine the static
equilibrium configuration
of the system
Select a
suitable
coordinate
The rate of change of
momentum of a
mass is equal to the
force acting on it.
v
i
b
r
a
t
i
o
n
s
.
Newton's 2nd law of motion
..
d d xt
d 2 xt
F t
m
m
mx
2
dt
dt
dt
..
..
F t kx m x m x kx 0
Energy conservation
Kinetic energy
Potential energy
1 .2
T mx
2
U
T U cons tan t
d
T U 0
dt
1 2
kx
2
..
m x kx 0
v
i
b
r
a
t
i
o
n
s
.
Vertical system
..
m x k x st mg ; mg k st
..
m x kx 0
v
i
b
r
a
t
i
o
n
s
Mathematical review
..
.
A1 t xt A2 t xt A3 t xt F t
F(t) = 0 → Homogenous
x(t) = C1x1 + C2x2
If A1,A2 and A3 are constants:
Characteristic equation:
A1s2+A2s+A3=0
.
s
A2
A22 4 A1 A3
2 A1
F(t) ≠ 0 → none homogenous
x(t) = C1x1 + C2x2 +xp
xp form is the same type
asF(t)
v
i
b
r
a
t
i
o
n
s
.
s
Only one real root:
s1,2
x(t) = C1est + C2t est
A2
A22 4 A1 A3
2 A1
Two unequal real
root: s1,2
x(t) = C1es1t + C2 es2t
Complex root:
s1,2 = α±βi
x(t) = eαt {C1cos(βt)
+ C1sin(βt)}
v
i
b
r
a
t
i
o
n
s
.
Solution
..
m x kx 0 is 2nd order homogenous differential equation
where: A1 = m, A2=0 and A3=k
s
4mk
k
i
in
2m
m
the solution : x(t) = eαt {C1cos(βt) + C1sin(βt)}
where α = 0 and β = ωn
x(t) = C1cos(ω nt) + C2sin(ω nt)
Natural
frequency
v
i
b
r
a
t
i
o
n
s
.
Solution
C1 and C2 can be determined from initial conditions (I.Cs). For
this case we need two I.Cs.
xt 0 C1 xo
.
.
xt 0 C2n x o
The I.Cs for this case would be:
So: xt xo cosnt
.
xo
n
sin nt Eq.1
v
i
b
r
a
t
i
o
n
s
.
Harmonic motion
Introduce Eq.2 into Eq.1: x(t ) = A cos(ωnt – ϕ ) = Ao sin(ωnt + ϕo)
v
i
b
r
a
t
i
o
n
s
.
Harmonic motion
xt C1 cosnt C2 sinnt
xt xo cos nt
.
xo
n
sin nt
Assume:
C1 = A cos(ϕ) --- Eq.2(a)
C2 = A sin(ϕ) --- Eq.2(b)
2
.
xo
A C12 C22 xo2 Amplitude
n
Ao A
Harmonic functions in time.
Mass spring system is called
harmonic oscillator
.
C
xo
tan 1 2 tan 1
Phase angle
xon
C1
x
o tan o. n
xo
1
v
i
b
r
a
t
i
o
n
s
.
Harmonic motion
v
i
b
r
a
t
i
o
n
s
Natural Frequency (N.F)
A system property (i.e. depends of system parameters m
and k )
Unit: rad/sec
It is related to the periodic time (τ ) : τ = 2π/ωn
Periodic time is the time taken to complete one cycle
(i.e. 4 strokes)
.
The relation between the ωn and τ is inverse relation
v
i
b
r
a
t
i
o
n
s
.
Example
2.1
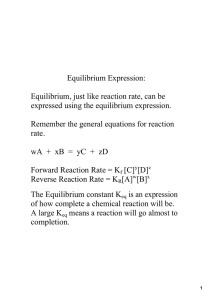
The column of the water tank shown in Fig
is 90m high and is made of reinforced
concrete with a tubular cross section of
inner diameter 2.4m and outer diameter
3m. The tank mass equal 3 x 105 kg when
filled with water. By neglecting the mass of
the column and assuming the Young’s
modulus of reinforced concrete as 30 Gpa.
determine the following:
the natural frequency and the natural
time period of transverse vibration of the
water tank
the vibration response of the water tank
due to an initial transverse displacement of
0.3m.
the maximum values of the velocity and
acceleration experienced by the tank.
v
i
b
r
a
t
i
o
n
s
.
Example 2.1 solution:
Initial assumptions:
1.
the water tank is a point mass
2.
the column has a uniform cross section
3.
the mass of the column is negligible
4.
the initial velocity of the water tank equal zero
v
i
b
r
a
t
i
o
n
s
.
Example 2.1 solution:
a. Calculation of natural frequency:
1. Stiffness: k 3EI
But: I
3
l
d
64
4
o
di4
3
64
4
2.44 2.3475 m 4
3x30 x109 x 2.3475
289,812 N / m
So: k
3
90
2. Natural frequency : n
k
289,812
0.9829 rad / s
5
m
3x10
v
i
b
r
a
t
i
o
n
s
Example 2.1 solution:
b. Finding the response:
1. x(t ) = A sin(ωnt + ϕ )
2
.
xo
A xo2 xo 0.3m
n
x
1 xon
o n
tan
tan
.
0 2
xo
So, x(t ) = 0.3 sin (0.9829t + 0.5π )
.
1
v
i
b
r
a
t
i
o
n
s
.
Example 2.1 solution:
c. Finding the max velocity:
.
xt 0.30.9829 cos 0.9829t
2
.
x max 0.30.9829 0.2949m / s
Finding the max acceleration :
..
2
xt 0.30.9829 sin 0.9829t
2
..
2
x max 0.30.9829 0.2898m / s 2
v
i
b
r
a
t
i
o
n
s
.
Example2 :
Q2.13
Find the natural frequency of
the pulley system shown in Fig.
by neglecting the friction and
the masses of the pulleys.
v
i
b
r
a
t
i
o
n
s
.
Example2 :
Q2.13
Solution:
1. Free body diagram
P
P
P
x1
x2
P
2. x = 2x1 +2x2 ---- Eq.1
x
v
i
b
r
a
t
i
o
n
s
Example2 :
Q2.13
Solution:
3. Equilibrium for pulley_1 : 2P = k1 x1 = 2k x1 ---- Eq.2
4. Equilibrium for pulley_2 : 2P = k2 x2 = 2k x2 ---- Eq.3
2P 2P
1
1
4P
5. Substitute Eqs 2 and 3 in Eq.1: x 2 2 4 P
2k 2k k
k1 k2
6.Let keq is the equivalent spring constant for the system: keq P k
x
..
7. Mathematical model: m x kx 0
.
8. Natural frequency: n
keq
m
k
4m
4
v
i
b
r
a
t
i
o
n
s
.
Rotational
system
Governing equation:
M
..
O
J O J O
..
J O mgl sin 0
Assume θ is very small
sin
..
J O mgl 0
Natural frequency (ωn)
JO
mgl
n
2
JO
mgl
v
i
b
r
a
t
i
o
n
s
.
Torsional system
Governing equation:
M
..
O
J O J O
..
J O kT 0
Natural frequency (ωn)
n
JO
JO
kT
2
JO
kT
hD 4
32
WD 2
8g
v
i
b
r
a
t
i
o
n
s
.
Solution
t A1 cosnt A2 sinnt
t 0 A1 o
.
.
t 0 A2n o
.
o
t o cosnt sin nt
n
v
i
b
r
a
t
i
o
n
s
.
Example
2.3
Any rigid body pivoted at a
point other than its center of
mass will oscillate about the
pivot point under its own
gravitational force. Such a
system is known as a compound
pendulum (see the Fig). Find
the natural frequency of such a
system.
Solution
v
i
the governing equation is found as:
b
..
r
J O Wd sin 0
a Assume small angle of vibration:
t
..
i
J O Wd 0
o
n So:
s
Wd
mgd
n
.
JO
JO
v
i
b
r
a
t
i
o
n
s
.
Example
2.4: Q2.12
Find the natural frequency of the system shown in Fig. with the
springs k1 and k2 in the end of the elastic beam.
v
i
b
r
a
t
i
o
n
s
.
Example
2.4: Q2.12
Solution: F.B,D
Example
2.4: Q2.12
v
i
Solution:
b
r
a keq is equivalent stiffness for the combination
t
3EI
i
kbeam 3
l
o
n k1 and k2 equivalent: apply energy concept
s
2
.
of k1, k2 and kbeam
1
1 2 1
x1
x2
2
2
keq ,1, 2 x k1 x1 k2 x2 keq k1 k2
2
2
2
x
x
2
Example
2.4: Q2.12
v
i
Solution:
b
r
a Finding keq
t
i
1
1
o
n
keq keq ,1, 2
s
.
1
kbeam
keq
keq ,1, 2 kbeam
keq ,1, 2 kbeam
Example
2.4: Q2.12
v
i
Solution:
b
r Finding natural frequency
a
keq
keq ,1, 2 kbeam
t
n
i
m
m keq ,1, 2 kbeam
o
2
n
x1 2
x2
k1 k 2 kbeam
s
.
x
x
n
2
x1 2
x
2
m k1 k 2 kbeam
x
x
x1, x2 and x can
be found from
strength relation
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.7
Three springs and a mass are attached to a rigid, weightless bar PQ
as shown in Fig. Find the natural frequency of vibration of the
system.
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.7
Solution :
Assume small angular motion sin
1
1
1
k1l12 k2l22
2
2
2
keq ,1, 2 l3 k1 l1 k2 l2 keq ,1, 2
2
2
2
l32
Let keq is the equivalent stiffness for the whole system
keq ,1, 2 k3
1
1
1
keq
keq keq ,1, 2 k3
k3 keq ,1, 2
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.7
Solution :
Now find the natural frequency
n
k k l k k l
m
m k l k l k l
keq
2
1 2 1
2
11
2
2 3 2
2
2
2 2
3 3
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.45
Draw the free-body diagram and derive the equation of motion
using Newton s second law of motion for each of the systems
shown in Fig
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.45
Solution F.B.D
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.45
Equation of motion:
The distance: x 4r o
..
For mass m: mg T m x --- (1)
..
For pulley Jo: J o Tr 4rk o 4r --- (2)
mg
According to static equilibrium: mgr k 4r 4r o o
--- (3)
16rk
v
i
b
r
a
t
i
o
n
s
.
Example
2.5: Q2.45
Equation of motion [cont]:
Substitute equations 1 and 3 into equation 1:
..
..
mg
2
J o mg m x r 16kr
16rk
..
..
..
..
2
J o mgr m x r 16kr mgr 0 J o m x r 16kr 2 0
..
..
Use the relation x r x r to relate the translational
motion with the rotational one:
..
2
J o mr 16kr2 0
S
t
a
t
i
c
s
.
P
End of chapter2 – part I